
Random Forests with Bagging and Genetic Algorithms Coupled with Least Trimmed Squares Regression for Soil Moisture Deficit Using SMOS Satellite Soil Moisture

 , , and
, , and 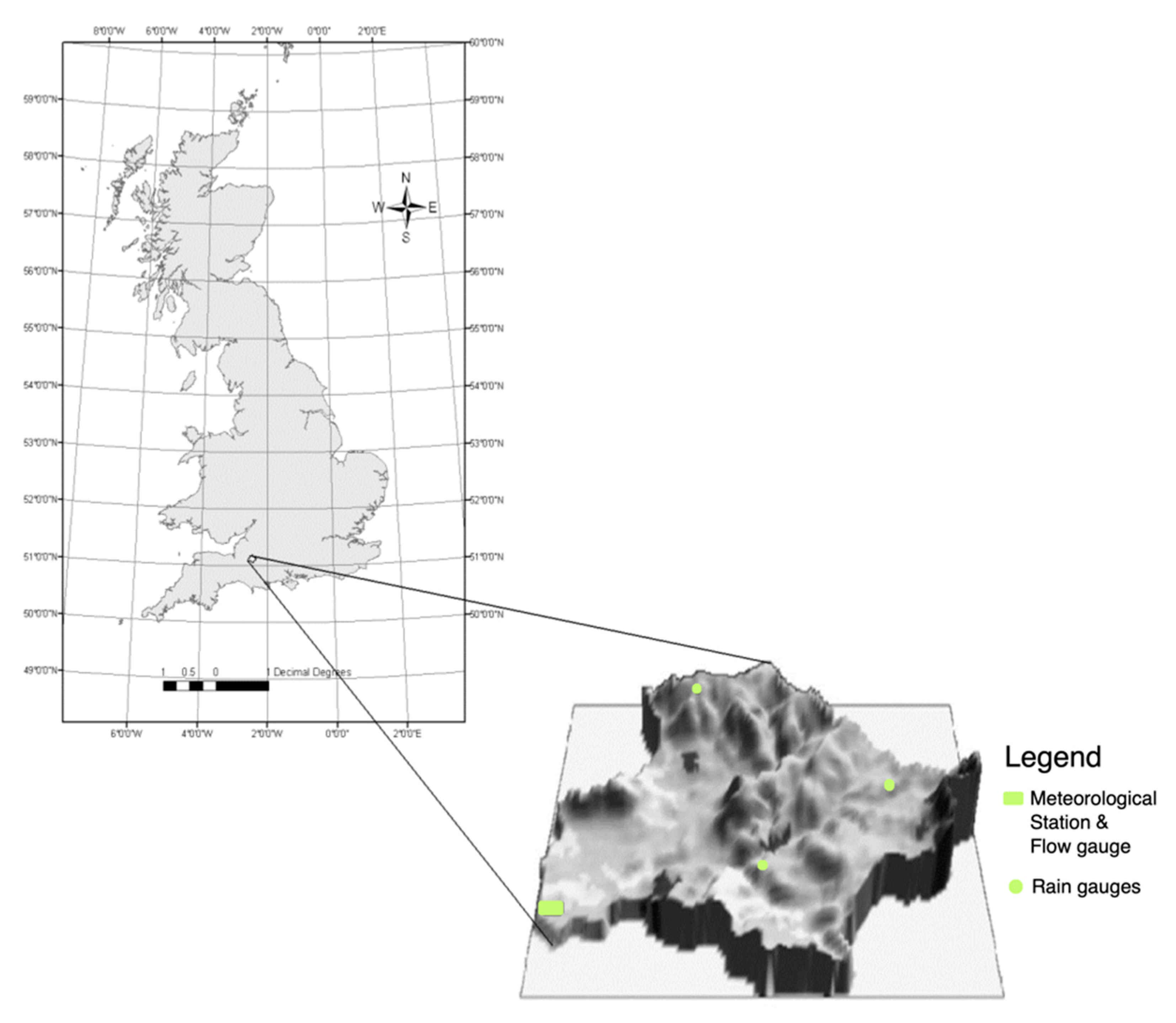{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Study area and Datasets
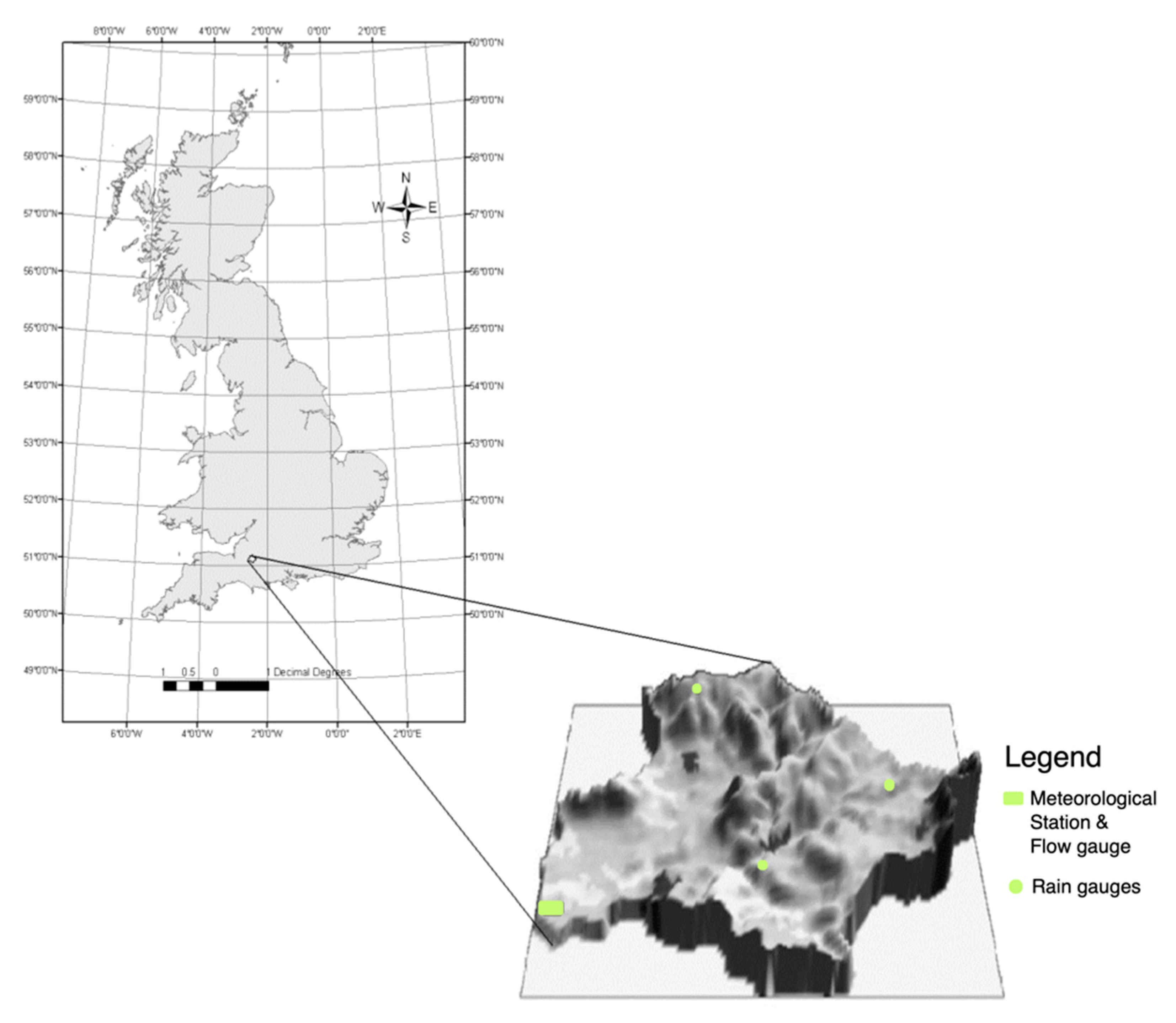
2.1. Study Area
2.2. Satellite Data
3. Probability Distributed Model (PDM)
4. Random Forests and Genetic Algorithm Coupled with Least Trimmed Squares (GALTS)
4.1. Genetic Algorithm Using Least Trimmed Square (GALTS)
4.2. Random Forests
5. Performance Evaluation
6. Results and Discussion
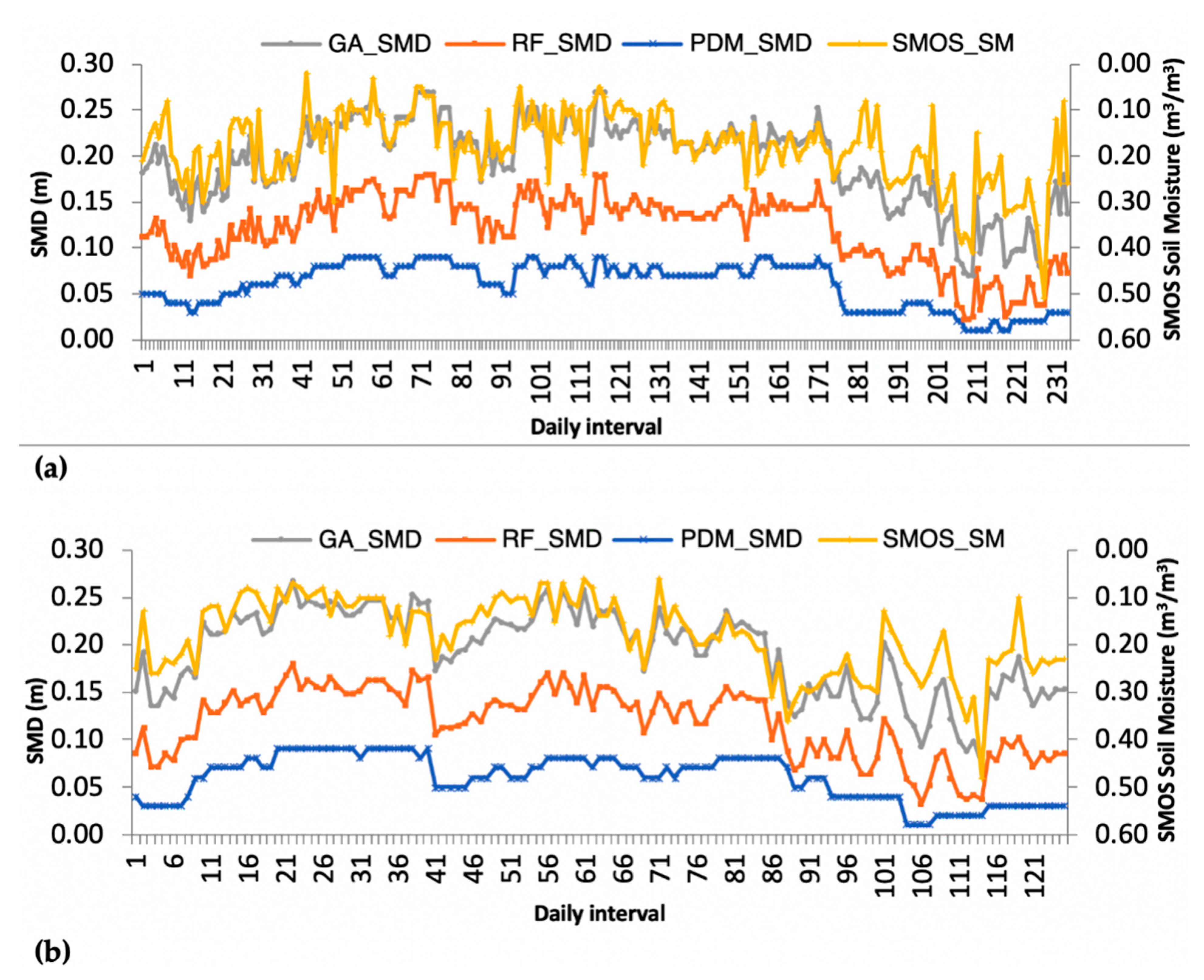
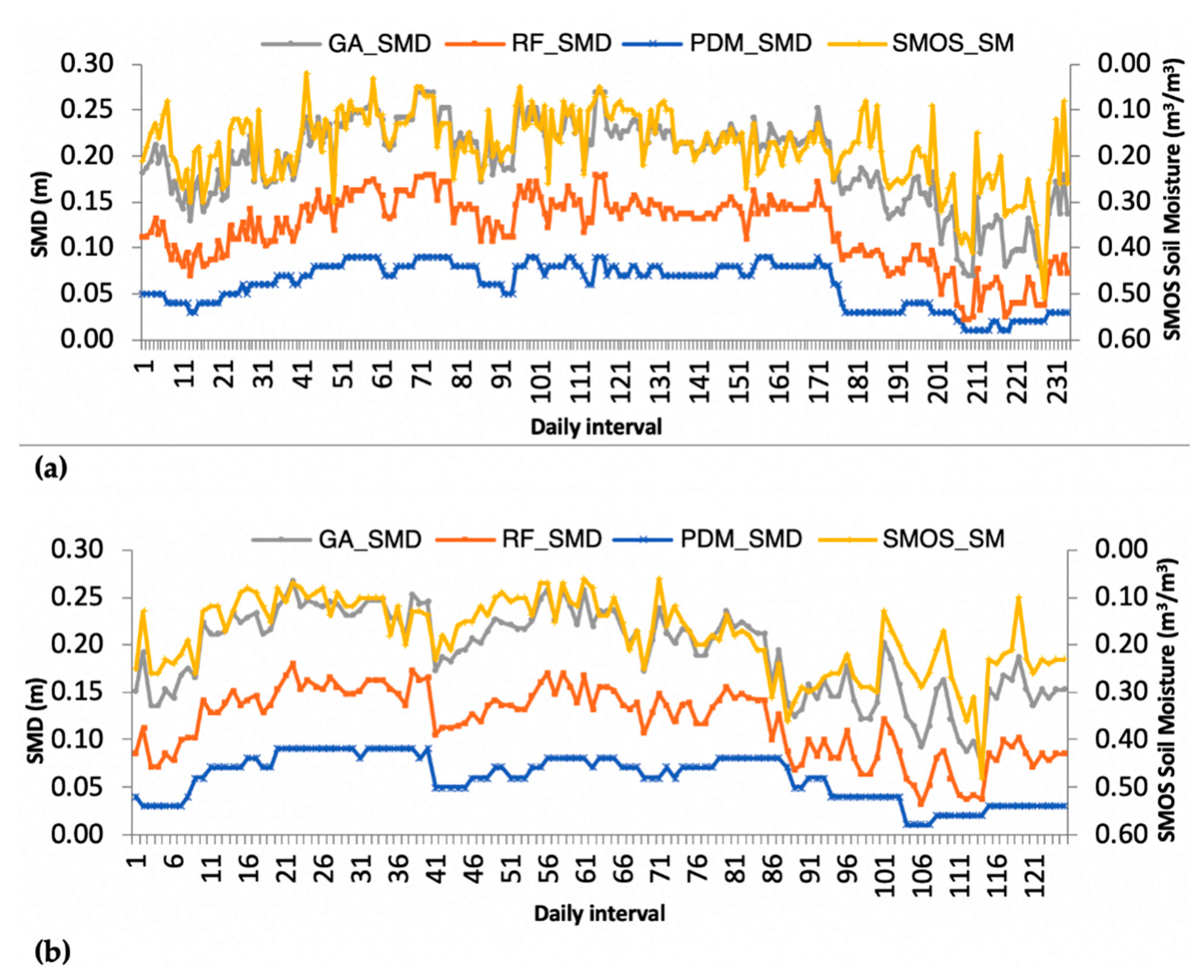
6.1. SMD and Soil Moisture Temporal Variations
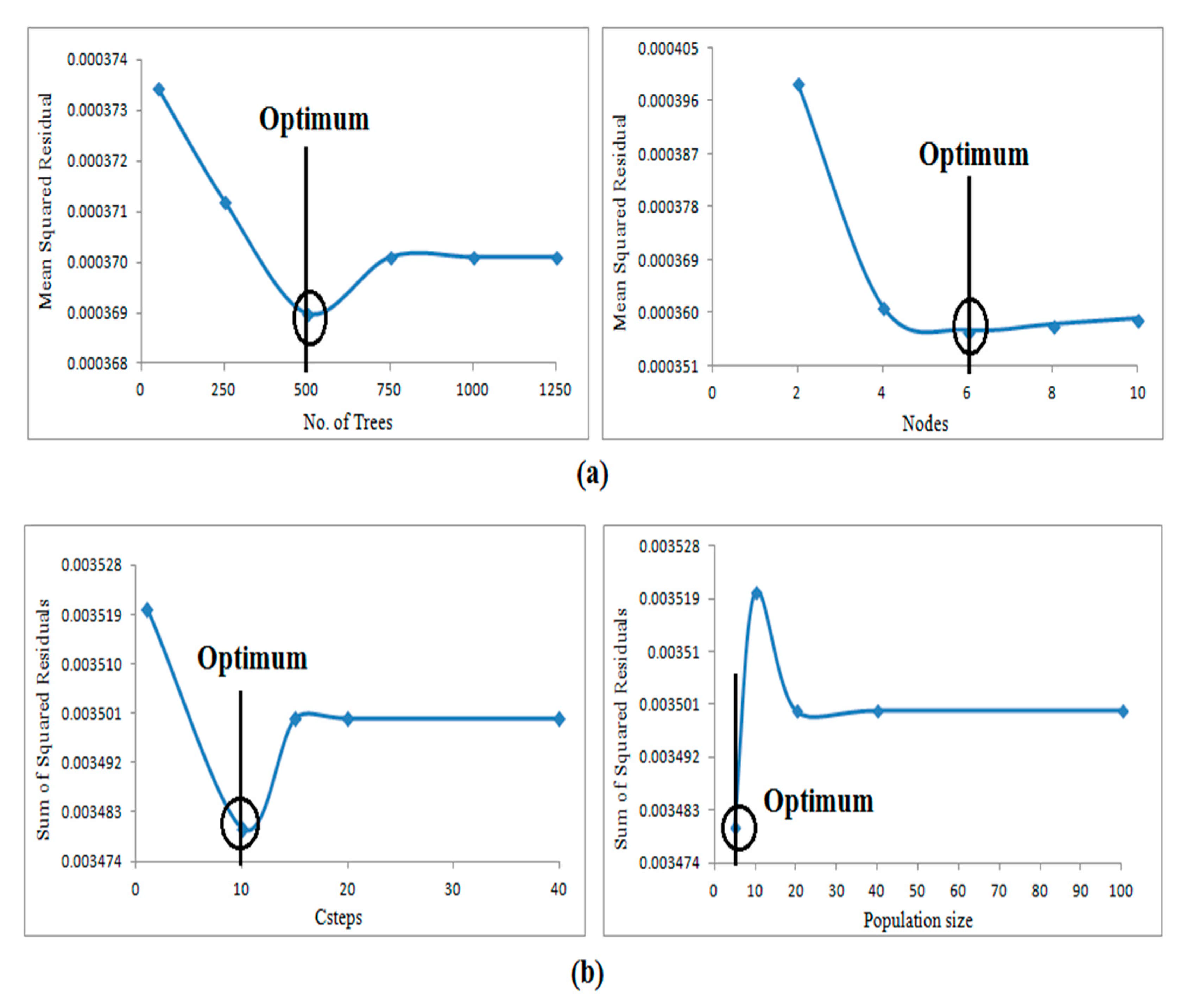
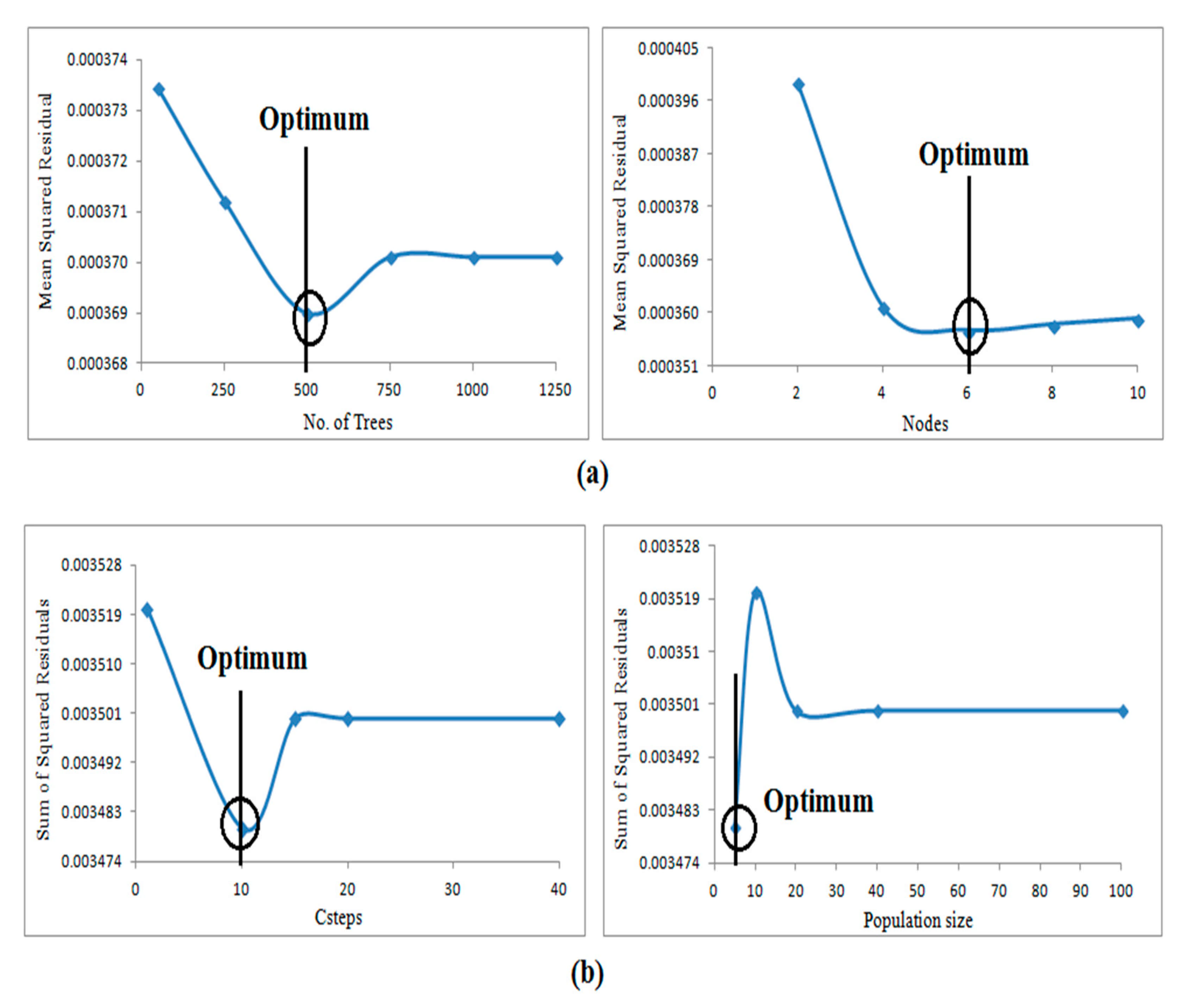
6.2. Optimisation of RFs and GALTSAlgorithms
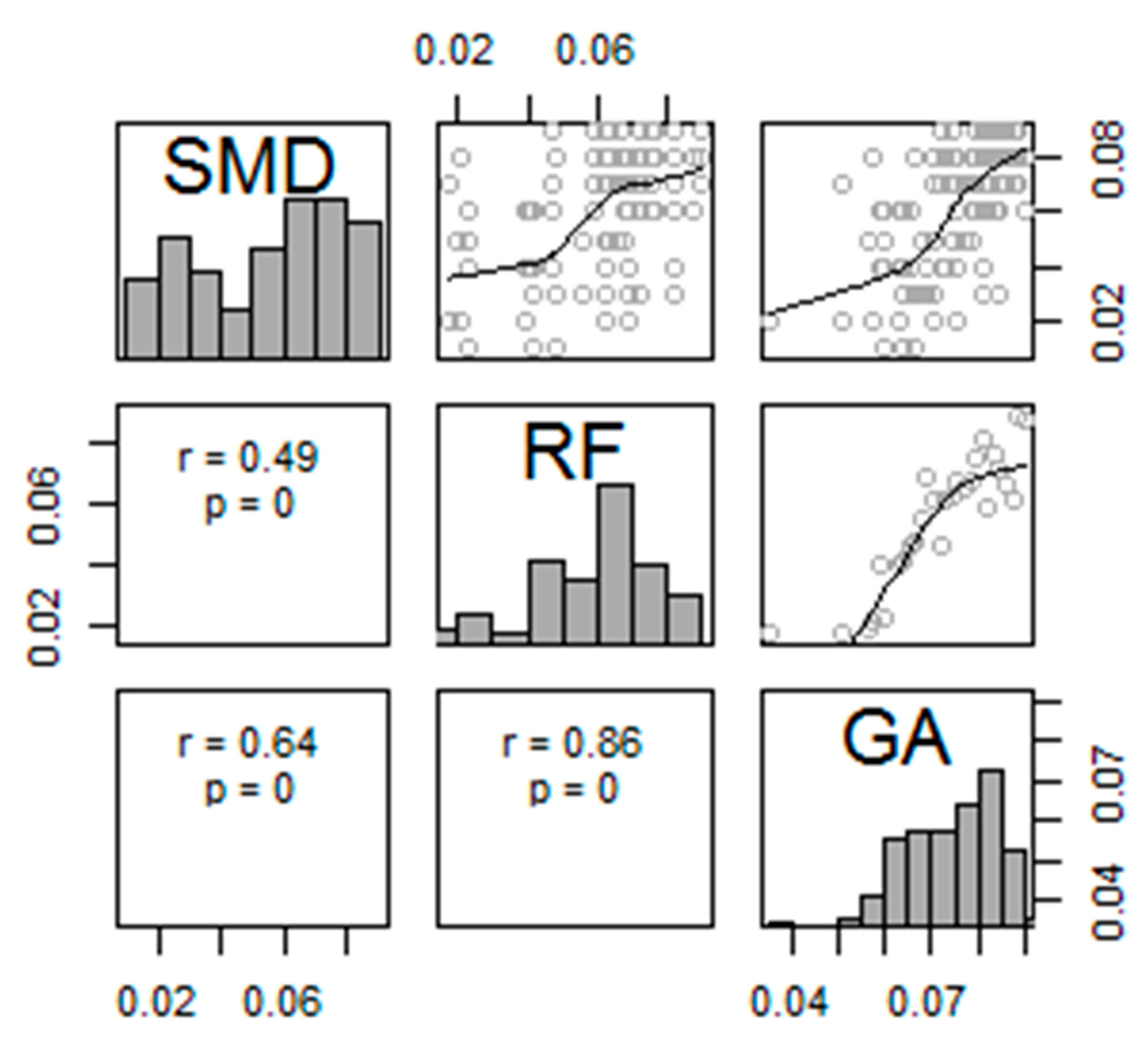
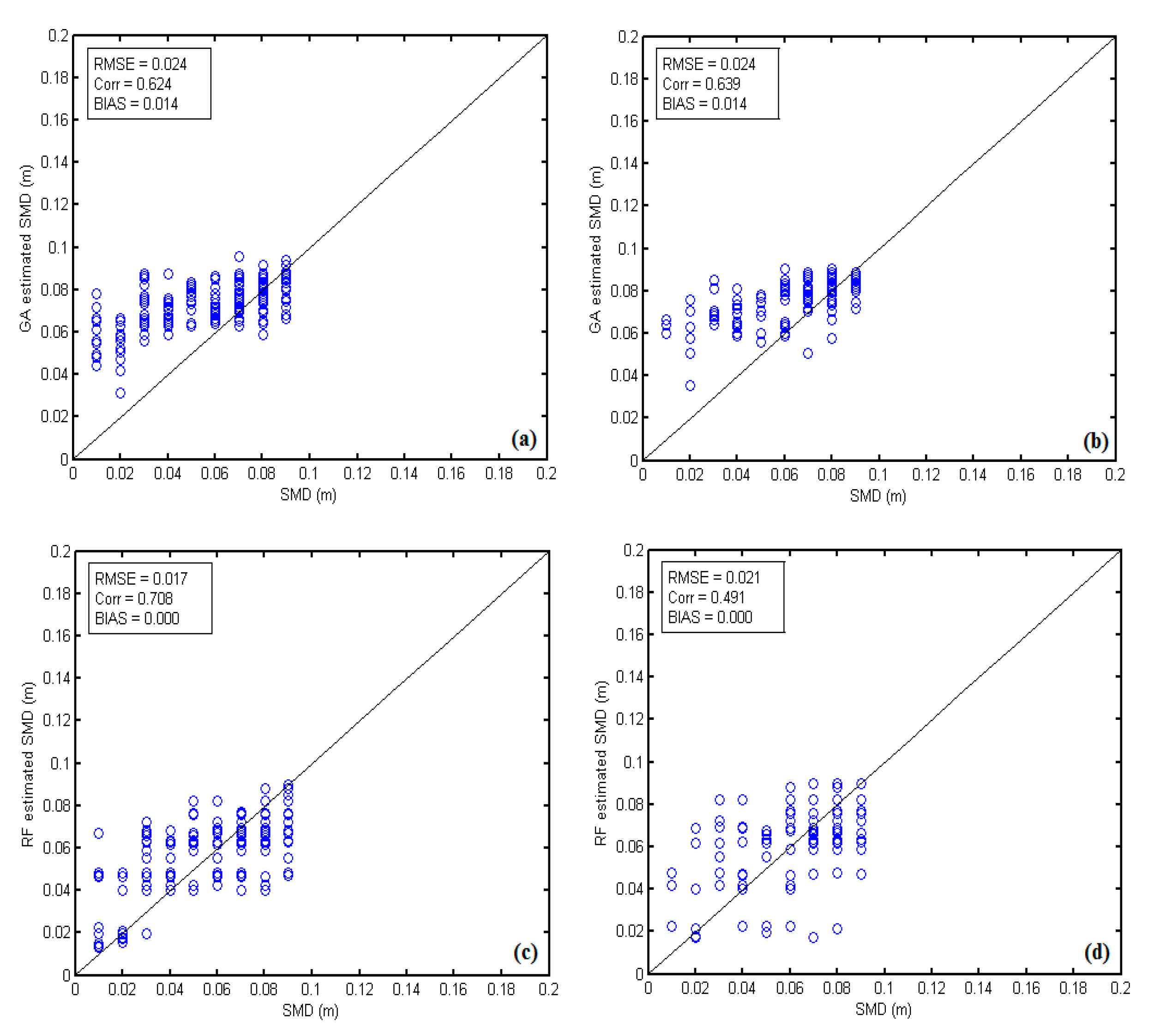
6.3. Performances of RFs and GALTS for SMD Prediction
6.4. Other Relevant Studies
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tsatsaris, A.; Kalogeropoulos, K.; Stathopoulos, N.; Louka, P.; Tsanakas, K.; Tsesmelis, D.E.; Krassanakis, V.; Petropoulos, G.P.; Pappas, V.; Chalkias, C. Geoinformation Technologies in Support of Environmental Hazards Monitoring under Climate Change: An Extensive Review. ISPRS Int. J. Geo-Inf. 2021, 10, 94. [Google Scholar] [CrossRef]
- Smith, J.M. Mathematical Modelling and Digital Simulation for Engineers and Scientists; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1986. [Google Scholar]
- Srivastava, P.K.; Han, D.; Rico-Ramirez, M.A.; O’Neill, P.; Islam, T.; Gupta, M. Assessment of SMOS soil moisture retrieval parameters using tau–omega algorithms for soil moisture deficit estimation. J. Hydrol. 2014, 519, 574–587. [Google Scholar] [CrossRef] [Green Version]
- Petropoulos, G.P.; McCalmont, J.P. An operational in-situ soil moisture and soil temperature monitoring network for west Wales, UK: The WSMN network. Sensors 2017, 17, 1481–1491. [Google Scholar] [CrossRef] [Green Version]
- Maurya, S.; Srivastava, P.K.; Yaduvanshi, A.; Petropoulos, G.P.; Zhuo, L.; Mall, R.K. Future projections of soil erosion using Coupled Model Intercomparison Project and Earth Observation datasets. J. Hydrol. 2021, 594. [Google Scholar] [CrossRef]
- Petropoulos, G.P.; Sandric, I.; Hristopulos, D.; Carlson, T.N. Evaporative fluxes and Surface Soil Moisture Retrievals in a Mediterranean setting from Sentinel-3 and the “simplified triangle”. Remote. Sens. 2020, 12, 3192. [Google Scholar] [CrossRef]
- Petropoulos, G.P.; Ireland, G.; Barrett, B. Surface Soil Moisture Retrievals from Remote Sensing: Current Status, Products & Future Trends. Phys. Chem. Earth 2015, 83–84, 36–56. [Google Scholar]
- Srivastava, P.K.; Pandey, P.C.; Petropoulos, G.P.; Kourgialas, N.K.; Pandley, S.; Singh, U. GIS and remote sensing aided information for soil moisture estimation: A comparative study of interpolation technique. Resources 2019, 8, 70. [Google Scholar] [CrossRef] [Green Version]
- Silva-Fuzzo, D.; Carlson, T.N.; Kourgialas, N.; Petropoulos, G.P. Coupling Remote Sensing with a water balance model for soybean yield predictions over large areas. Earth Sci. Inform. 2020, 13, 345–359. [Google Scholar] [CrossRef]
- Srivastava, P.K.; Han, D.; Rico-Ramirez, M.A.; Al-Shrafany, D.; Islam, T. Data fusion techniques for improving soil moisture deficit using SMOS satellite and WRF-NOAH land surface model. Water Resour. Manag. 2013, 27, 5069–5087. [Google Scholar] [CrossRef]
- Moran, M.; Clarke, T.; Inoue, Y.; Vidal, A. Estimating crop water deficit using the relation between surface-air temperature and spectral vegetation index. Remote Sens. Environ. 1994, 49, 246–263. [Google Scholar] [CrossRef]
- Narasimhan, B.; Srinivasan, R. Development and evaluation of Soil Moisture Deficit Index (SMDI) and Evapotranspiration Deficit Index (ETDI) for agricultural drought monitoring. Agric. For. Meteorol. 2005, 133, 69–88. [Google Scholar] [CrossRef]
- North, M.R.; Petropoulos, G.P.; Rentall, D.V.; Ireland, G.I.; McCalmont, J.P. Quantifying the prediction accuracy of a 1-D SVAT model at a range of ecosystems in the USA and Australia: Evidence towards its use as a tool to study Earth’s system interactions. Earth Surf. Dyn. Discuss. 2015, 6, 217–265. [Google Scholar]
- Calder, I.; Harding, R.; Rosier, P. An objective assessment of soil-moisture deficit models. J. Hydrol. 1983, 60, 329–355. [Google Scholar] [CrossRef]
- Rushton, K.; Eilers, V.; Carter, R. Improved soil moisture balance methodology for recharge estimation. J. Hydrol. 2006, 318, 379–399. [Google Scholar] [CrossRef]
- Taylor, S.A. Use of mean soil moisture tension to evaluate the effect of soil moisture on crop yields. Soil Sci. 1952, 74, 217–226. [Google Scholar] [CrossRef]
- Feddes, R.A.; Kowalik, P.J.; Zaradny, H. Simulation of Field Water Use and Crop Yield; Centre for Agricultural Publishing and Documentation: Wageningen, The Netherlands, 1978. [Google Scholar]
- Piniewski, M.; Marcinkowski, P.; O’Keeffe, J.; Szcześniak, M.; Nieróbca, A.; Kozyra, J.; Kundzewicz, Z.W.; Okruszko, T. Model-based reconstruction and projections of soil moisture anomalies and crop losses in Poland. Theor. Appl. Climatol. 2020, 140, 691–708. [Google Scholar] [CrossRef] [Green Version]
- Codjoe, S.N.A.; Atidoh, L.K.; Burkett, V. Gender and occupational perspectives on adaptation to climate extremes in the Afram Plains of Ghana. Clim. Chang. 2012, 110, 431–454. [Google Scholar] [CrossRef]
- Halcrow, H.G. Actuarial structures for crop insurance. J. Farm Econ. 1949, 31, 418–443. [Google Scholar] [CrossRef]
- Selirio, I.; Brown, D. Soil moisture-based simulation of forage yield. Agric. Meteorol. 1979, 20, 99–114. [Google Scholar] [CrossRef]
- Cabus, P. River flow prediction through rainfall–runoff modelling with a probability-distributed model (PDM) in Flanders, Belgium. Agric. Water Manag. 2008, 95, 859–868. [Google Scholar] [CrossRef]
- Tripp, D.R.; Niemann, J.D. Evaluating the parameter identifiability and structural validity of a probability-distributed model for soil moisture. J. Hydrol. 2008, 353, 93–108. [Google Scholar] [CrossRef]
- Koza, J.R. Genetic Programming II; MIT Press: Cambridge, MA, USA, 1994; Volume 17. [Google Scholar]
- Liaw, A.; Wiener, M. Classification and regression by random Forest. R News 2002, 2, 18–22. [Google Scholar]
- Islam, T.; Rico-Ramirez, M.A.; Han, D. Tree-based genetic programming approach to infer microphysical parameters of the DSDs from the polarization diversity measurements. Comput. Geosci. 2012, 48, 20–30. [Google Scholar] [CrossRef]
- Svetnik, V.; Liaw, A.; Tong, C.; Culberson, J.C.; Sheridan, R.P.; Feuston, B.P. Random forest: A classification and regression tool for compound classification and QSAR modeling. J. Chem. Inf. Comput. Sci. 2003, 43, 1947–1958. [Google Scholar] [CrossRef] [PubMed]
- Rodriguez-Galiano, V.F.; Ghimire, B.; Rogan, J.; Chica-Olmo, M.; Rigol-Sanchez, J.P. An assessment of the effectiveness of a random forest classifier for land-cover classification. ISPRS J. Photogramm. Remote Sens. 2012, 67, 93–104. [Google Scholar] [CrossRef]
- Islam, T.; Rico-Ramirez, M.A.; Srivastava, P.K.; Dai, Q. Non-parametric rain/no rain screening method for satellite-borne passive microwave radiometers at 19–85 GHz channels with the Random Forests algorithm. Int. J. Remote Sens. 2014, 35, 3254–3267. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Kumar, P.; Prasad, R.; Gupta, D.K.; Mishra, V.N.; Vishwakarma, A.K.; Yadav, V.P.; Bala, R.; Choudhary, A.; Avtar, R. Estimation of winter wheat crop growth parameters using time series Sentinel-1A SAR data. Geocarto Int. 2018, 33, 942–956. [Google Scholar] [CrossRef]
- Satman, M.H. A genetic algorithm based modification on the LTS algorithm for large data sets. Commun. Stat. Simul. Comput. 2012, 41, 644–652. [Google Scholar] [CrossRef]
- Srivastava, P.K.; Han, D.; Rico-Ramirez, M.A.; Islam, T. Sensitivity and uncertainty analysis of mesoscale model downscaled hydro-meteorological variables for discharge prediction. Hydrol. Process. 2014, 28, 4419–4432. [Google Scholar] [CrossRef]
- Borga, M. Accuracy of radar rainfall estimates for streamflow simulation. J. Hydrol. 2002, 267, 26–39. [Google Scholar] [CrossRef]
- Mellor, D.; Sheffield, J.; O’Connell, P.E.; Metcalfe, A.V. A stochastic space-time rainfall forecasting system for real time flow forecasting II: Application of SHETRAN and ARNO rainfall runoff models to the Brue catchment. Hydrol. Earth Syst. Sci. 2000, 4, 617–626. [Google Scholar] [CrossRef] [Green Version]
- Bell, V.A.; Moore, R.J. The sensitivity of catchment runoff models to rainfall data at different spatial scales. Hydrol. Earth Syst. Sci. 2000, 4, 653–667. [Google Scholar] [CrossRef]
- Moore, R.J.; Jones, D.A.; Cox, D.R.; Isham, V.S. Design of the HYREX raingauge network. Hydrol. Earth Syst. Sci. 2000, 4, 521–530. [Google Scholar] [CrossRef] [Green Version]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.-P.; Martinuzzi, J.-M.; Font, J.; Berger, M. Soil moisture retrieval from space: The Soil Moisture and Ocean Salinity (SMOS) mission. Geosci. Remote. Sens. IEEE Trans. 2001, 39, 1729–1735. [Google Scholar] [CrossRef]
- Pinori, S.; Crapolicchio, R.; Mecklenburg, S. Preparing the ESA-SMOS (soil moisture and ocean salinity) mission-overview of the user data products and data distribution strategy. In Proceedings of the 2008 Microwave Radiometry and Remote Sensing of the Environment, Florence, Italy, 11–14 March 2008; pp. 1–4. [Google Scholar]
- Moore, R.J. The PDM rainfall-runoff model. Hydrol. Earth Syst. Sci. 2007, 11, 483–499. [Google Scholar] [CrossRef]
- Liu, J.; Han, D. Indices for calibration data selection of the rainfall-runoff model. Water Resour. Res. 2010, 46, W04512. [Google Scholar] [CrossRef] [Green Version]
- Srivastava, P.K.; Han, D.; Ramirez, M.R.; Islam, T. Machine Learning Techniques for Downscaling SMOS Satellite Soil Moisture Using MODIS Land Surface Temperature for Hydrological Application. Water Resour. Manag. 2013, 27, 3127–3144. [Google Scholar] [CrossRef]
- Rousseeuw, P.J.; Van Driessen, K. Computing LTS regression for large data sets. Data Min. Knowl. Discov. 2006, 12, 29–45. [Google Scholar] [CrossRef] [Green Version]
- Gislason, P.O.; Benediktsson, J.A.; Sveinsson, J.R. Random forests for land cover classification. Pattern Recognit. Lett. 2006, 27, 294–300. [Google Scholar] [CrossRef]
- Srivastava, P.K.; Han, D.; Rico-Ramirez, M.A.; O’Neill, P.; Islam, T.; Gupta, M.; Dai, Q. Performance evaluation of WRF-Noah Land surface model estimated soil moisture for hydrological application: Synergistic evaluation using SMOS retrieved soil moisture. J. Hydrol. 2015, 529, 200–212. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Srivastava, P.K.; Petropoulos, G.P.; Prasad, R.; Triantakonstantis, D. Random Forests with Bagging and Genetic Algorithms Coupled with Least Trimmed Squares Regression for Soil Moisture Deficit Using SMOS Satellite Soil Moisture. ISPRS Int. J. Geo-Inf. 2021, 10, 507. https://doi.org/10.3390/ijgi10080507
Srivastava PK, Petropoulos GP, Prasad R, Triantakonstantis D. Random Forests with Bagging and Genetic Algorithms Coupled with Least Trimmed Squares Regression for Soil Moisture Deficit Using SMOS Satellite Soil Moisture. ISPRS International Journal of Geo-Information. 2021; 10(8):507. https://doi.org/10.3390/ijgi10080507
Chicago/Turabian StyleSrivastava, Prashant K., George P. Petropoulos, Rajendra Prasad, and Dimitris Triantakonstantis. 2021. "Random Forests with Bagging and Genetic Algorithms Coupled with Least Trimmed Squares Regression for Soil Moisture Deficit Using SMOS Satellite Soil Moisture" ISPRS International Journal of Geo-Information 10, no. 8: 507. https://doi.org/10.3390/ijgi10080507