Neural Networks Integrated Circuit for Biomimetics MEMS Microrobot

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Biomimetics MEMS Microrobot
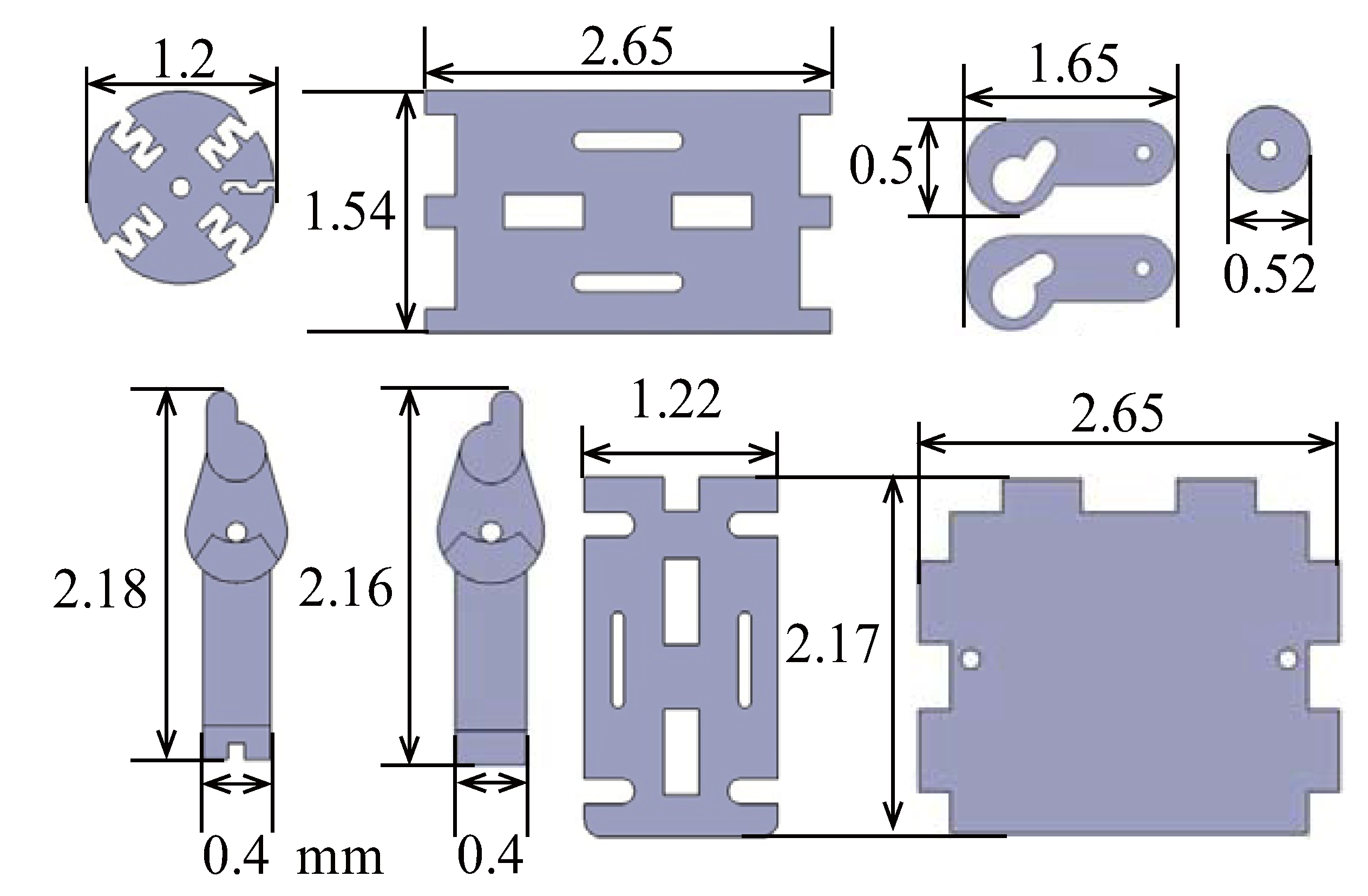
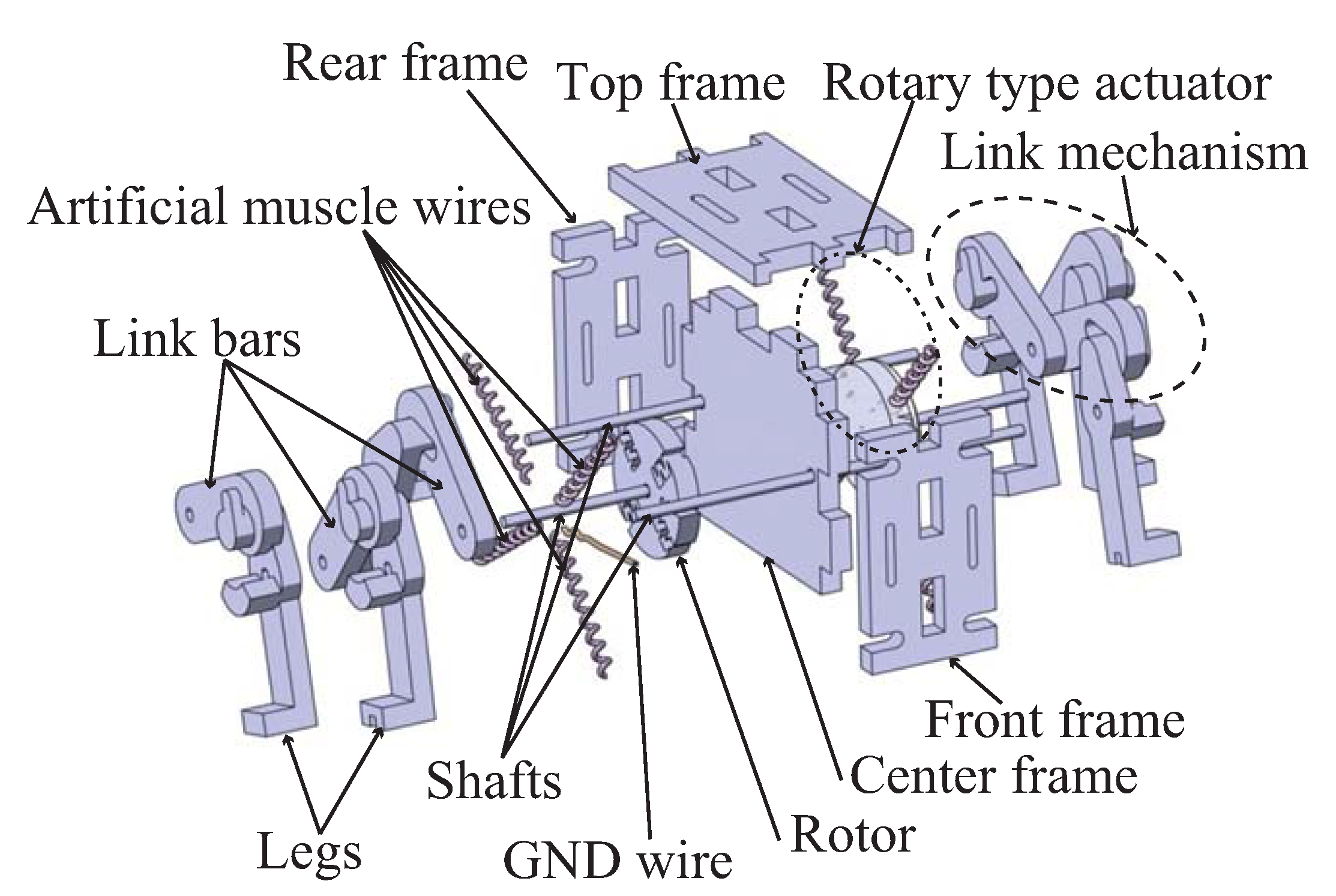
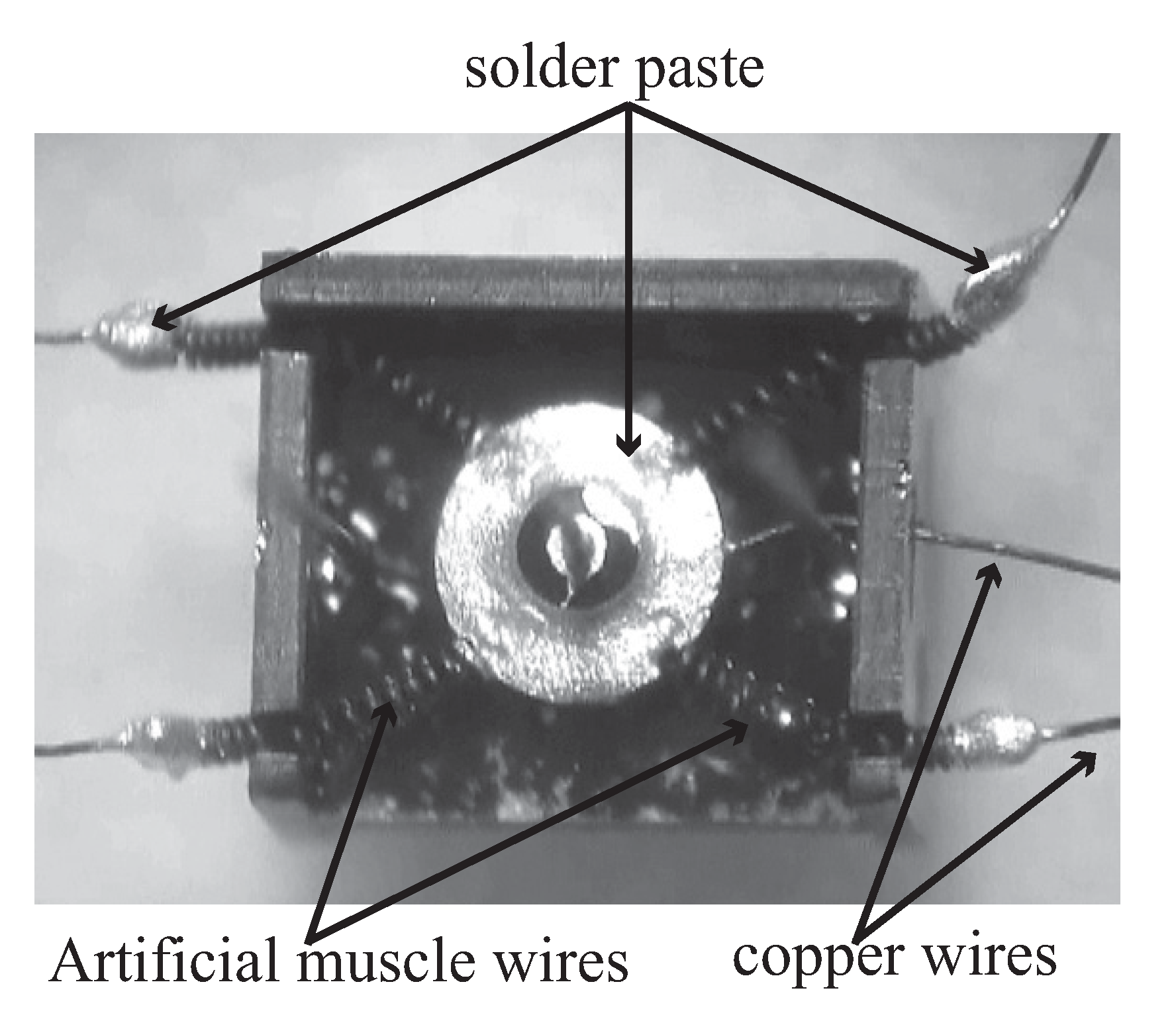
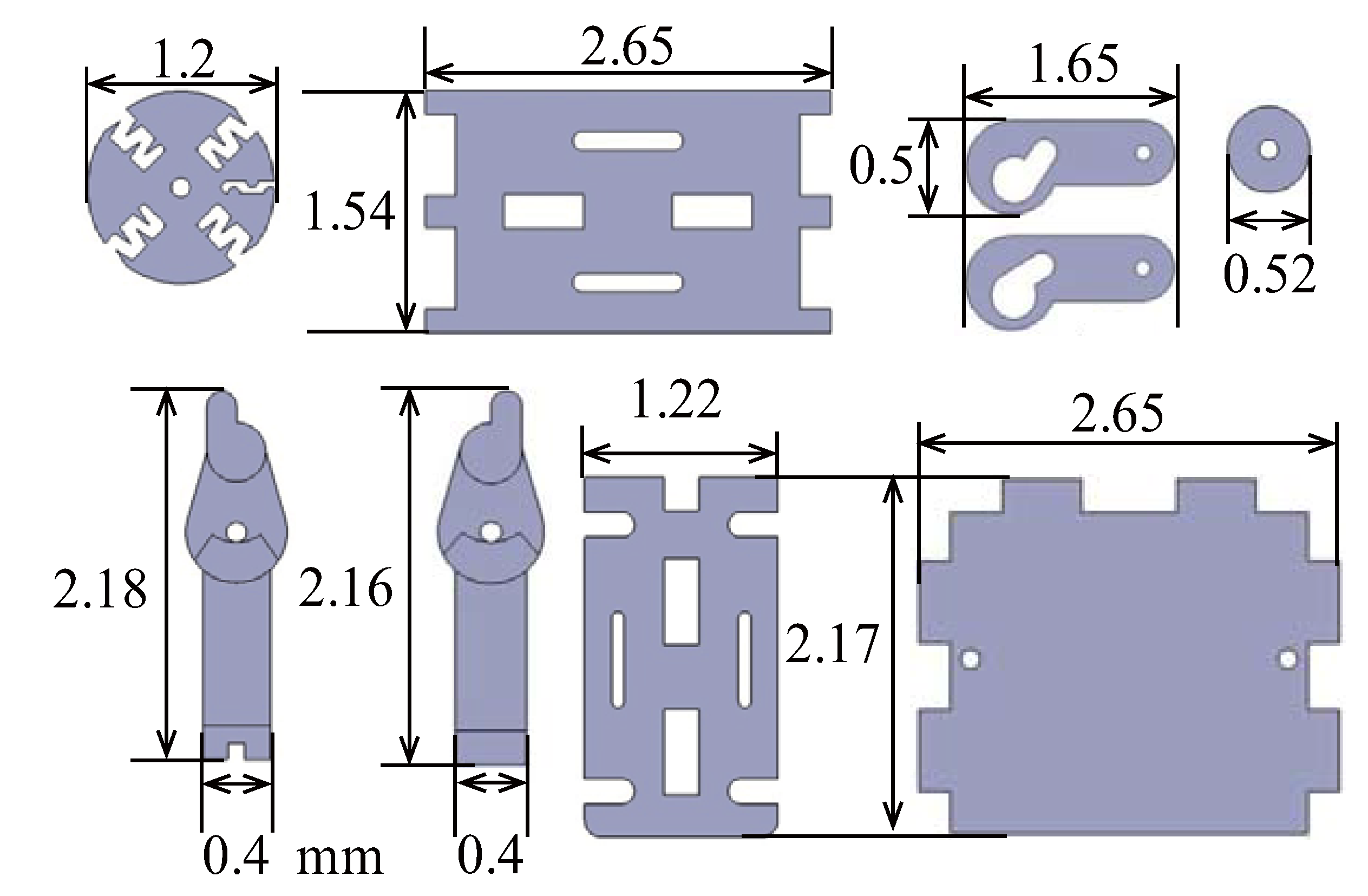
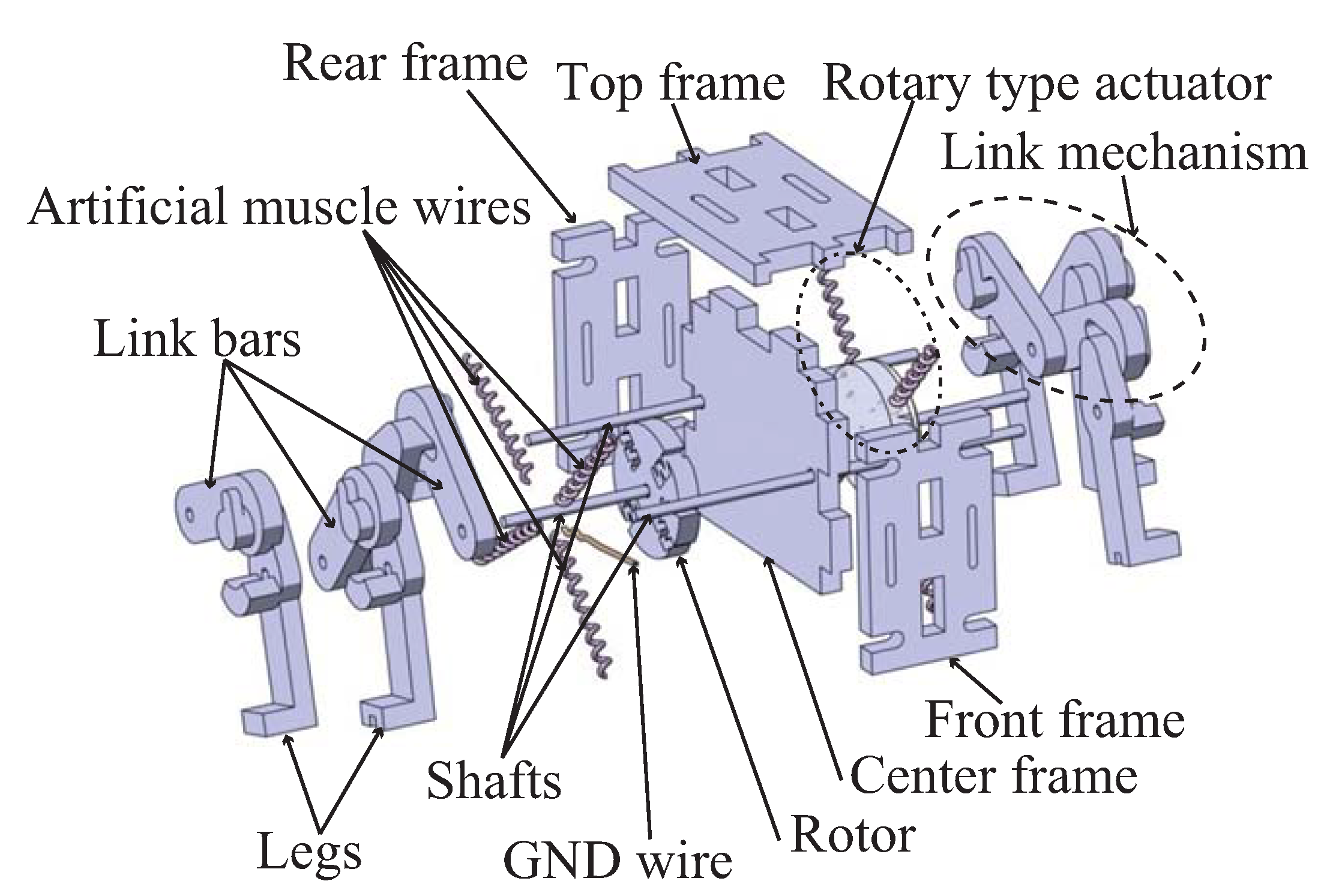
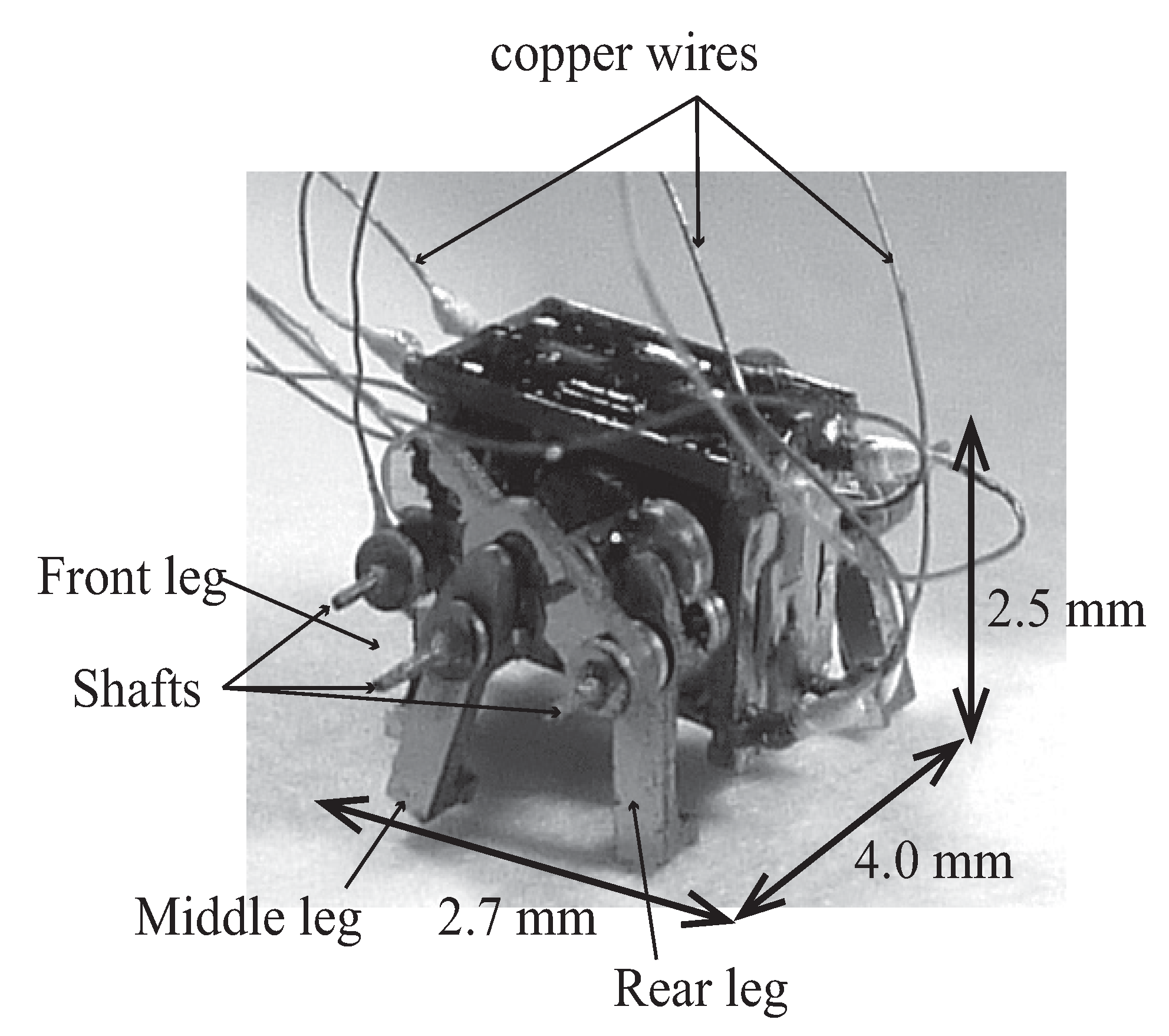
2.1. Mechanical Components

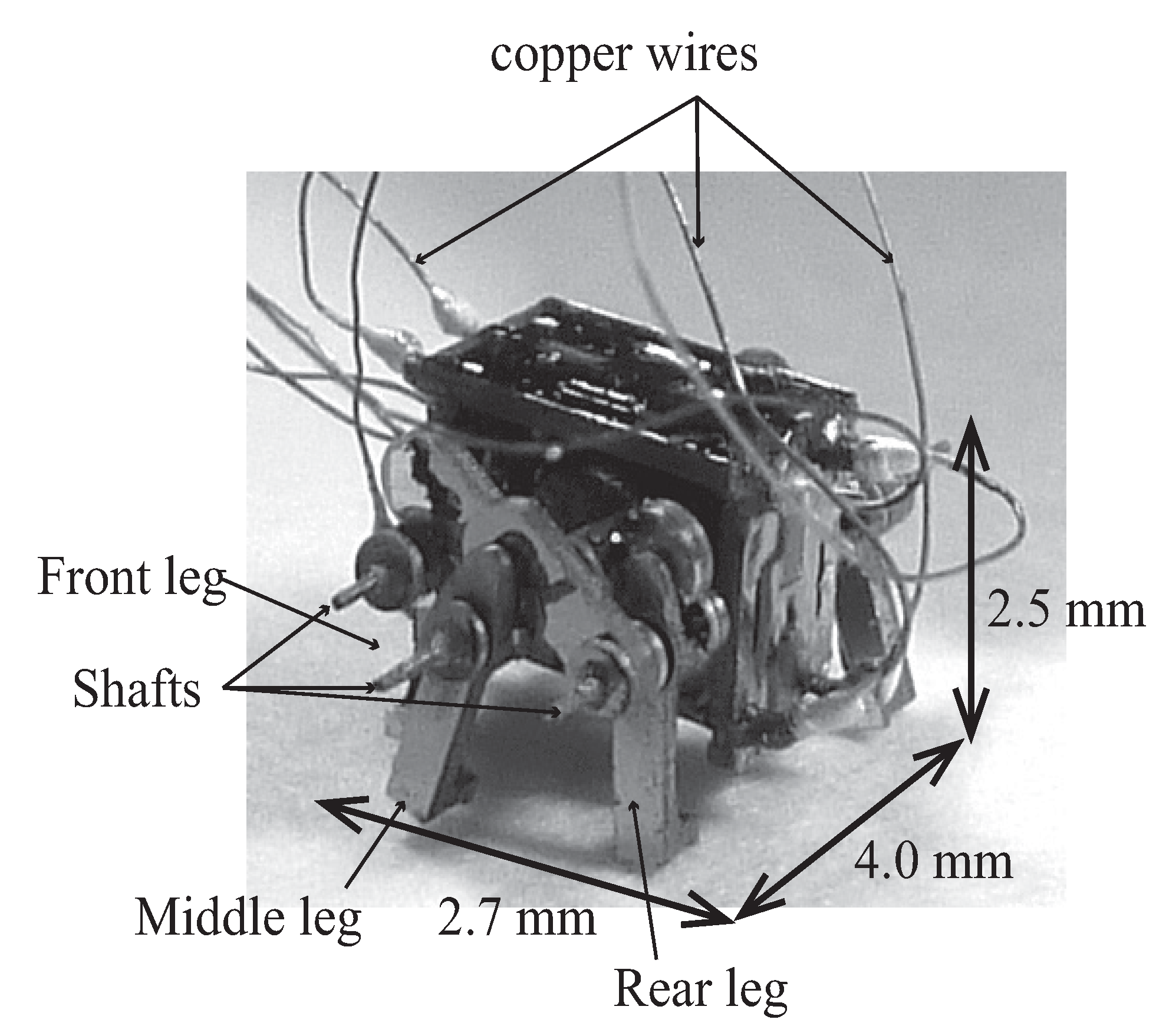
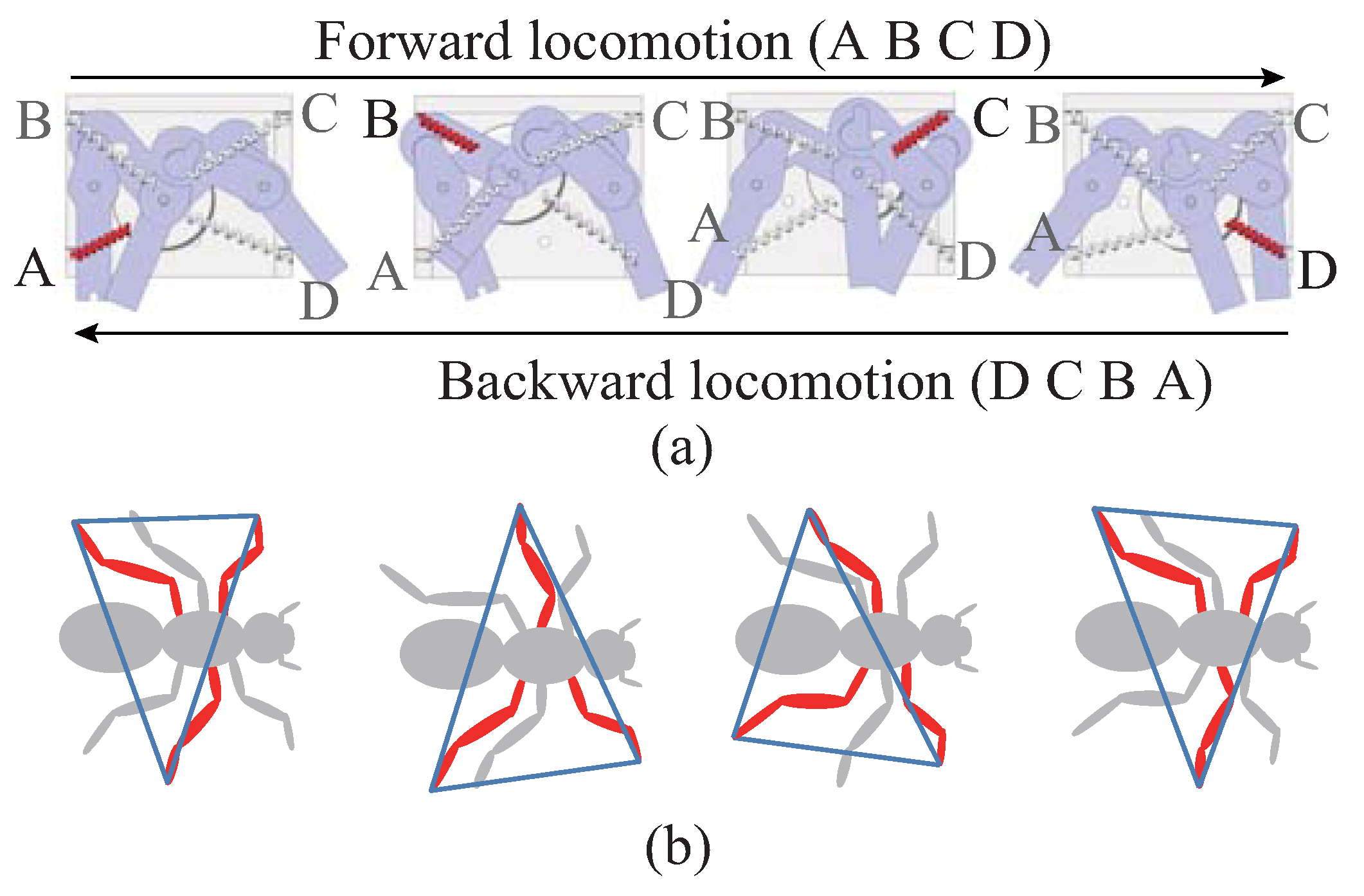
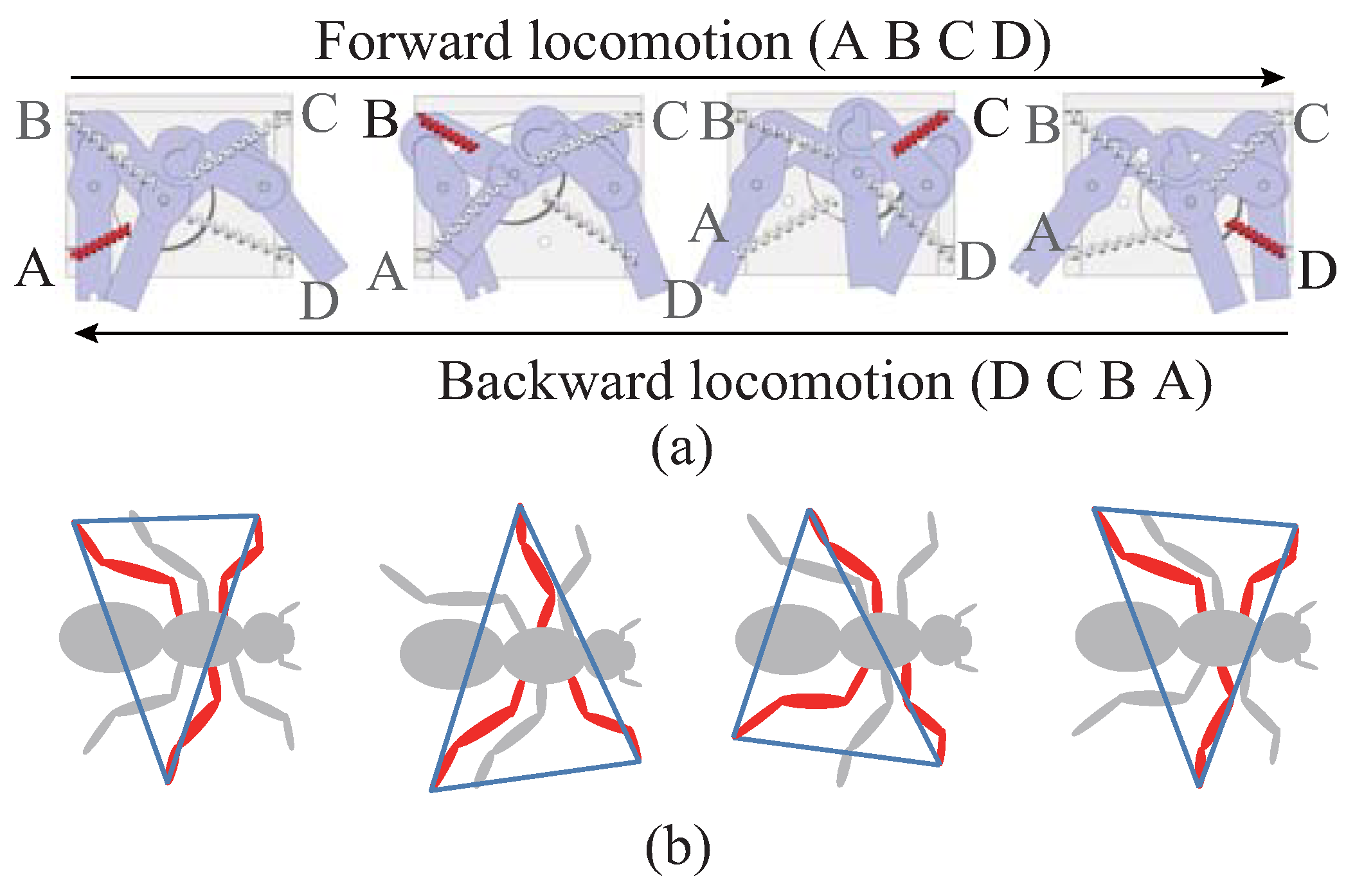
2.2. Locomotion Mechanisms
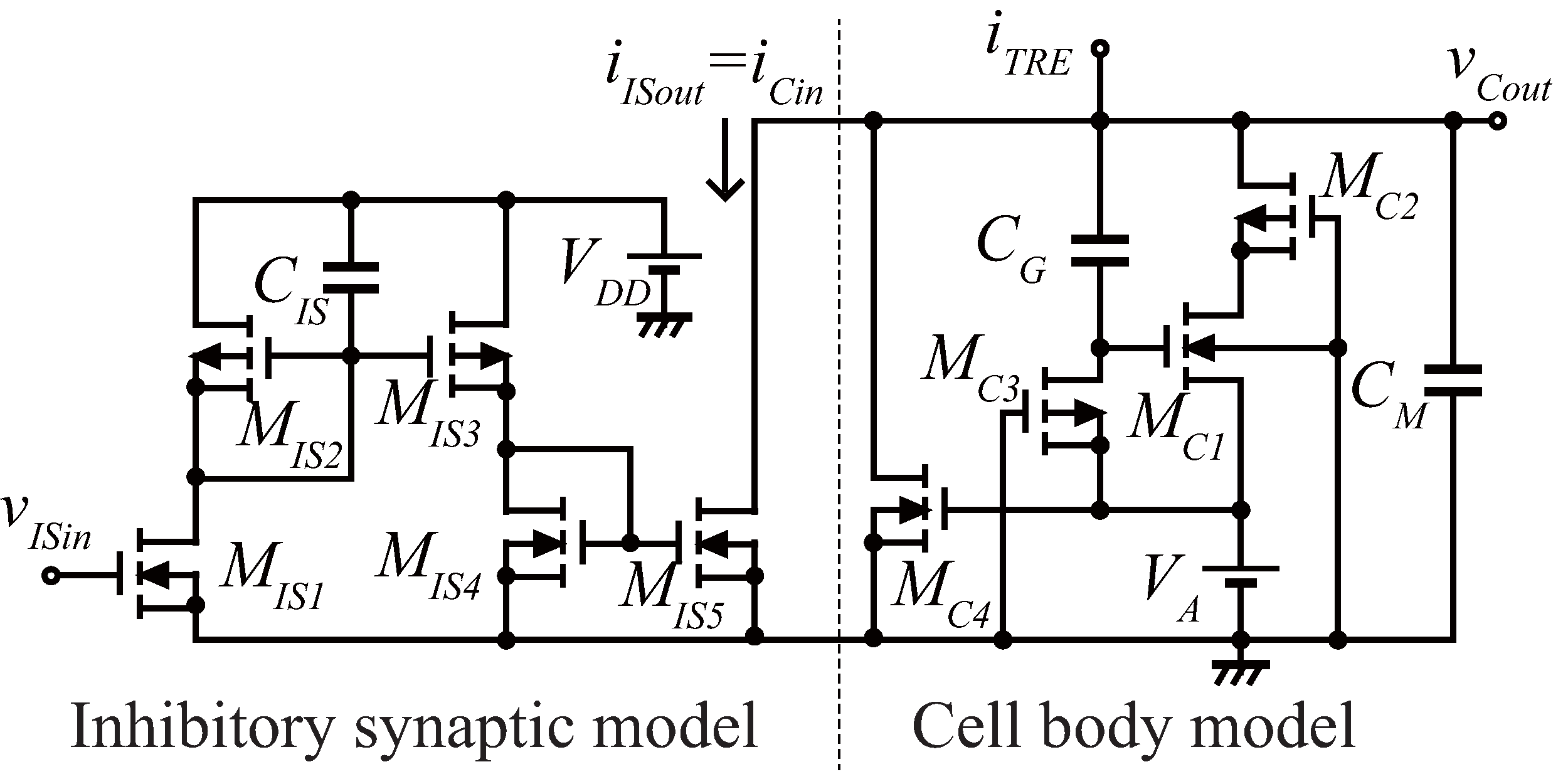
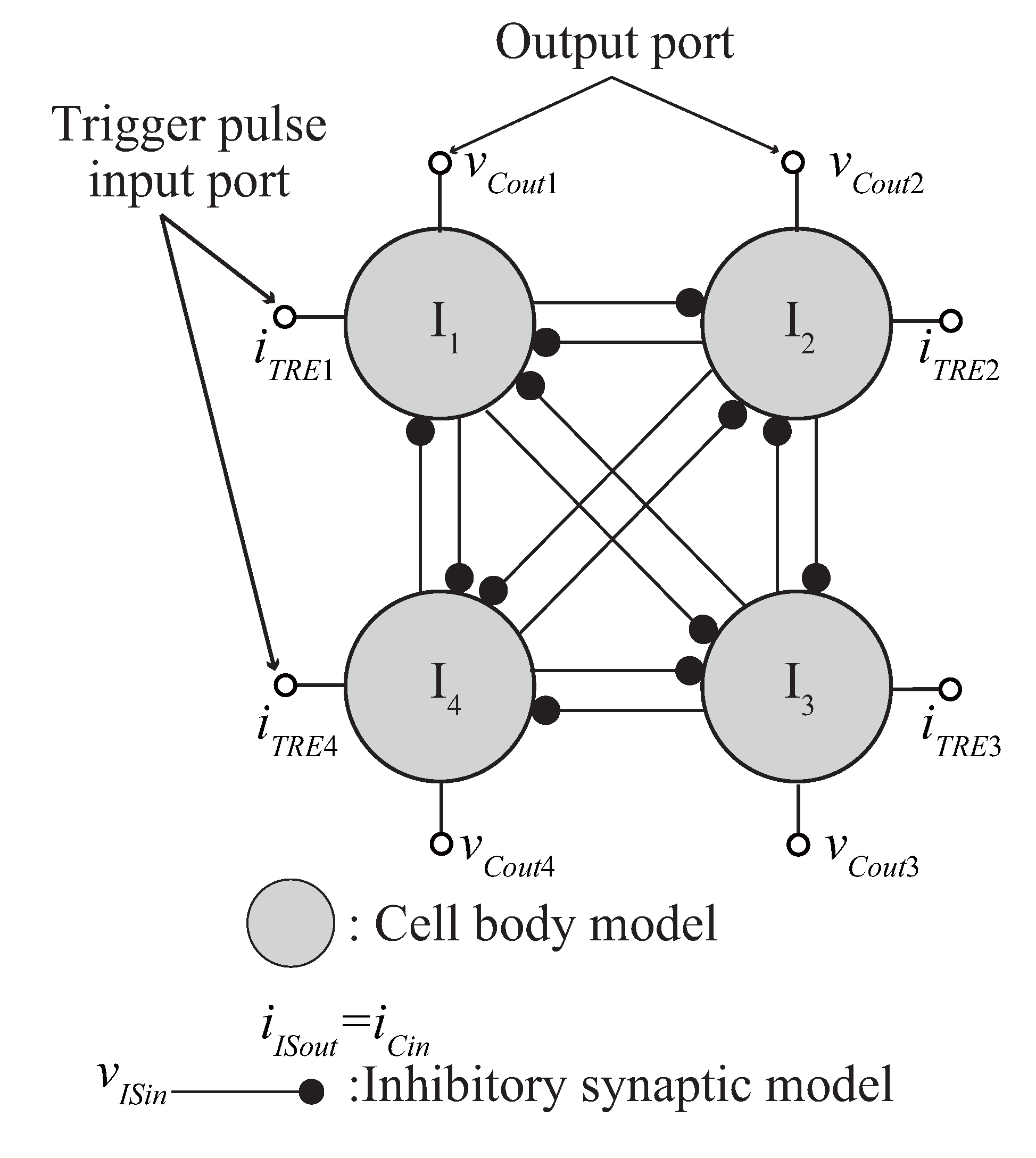
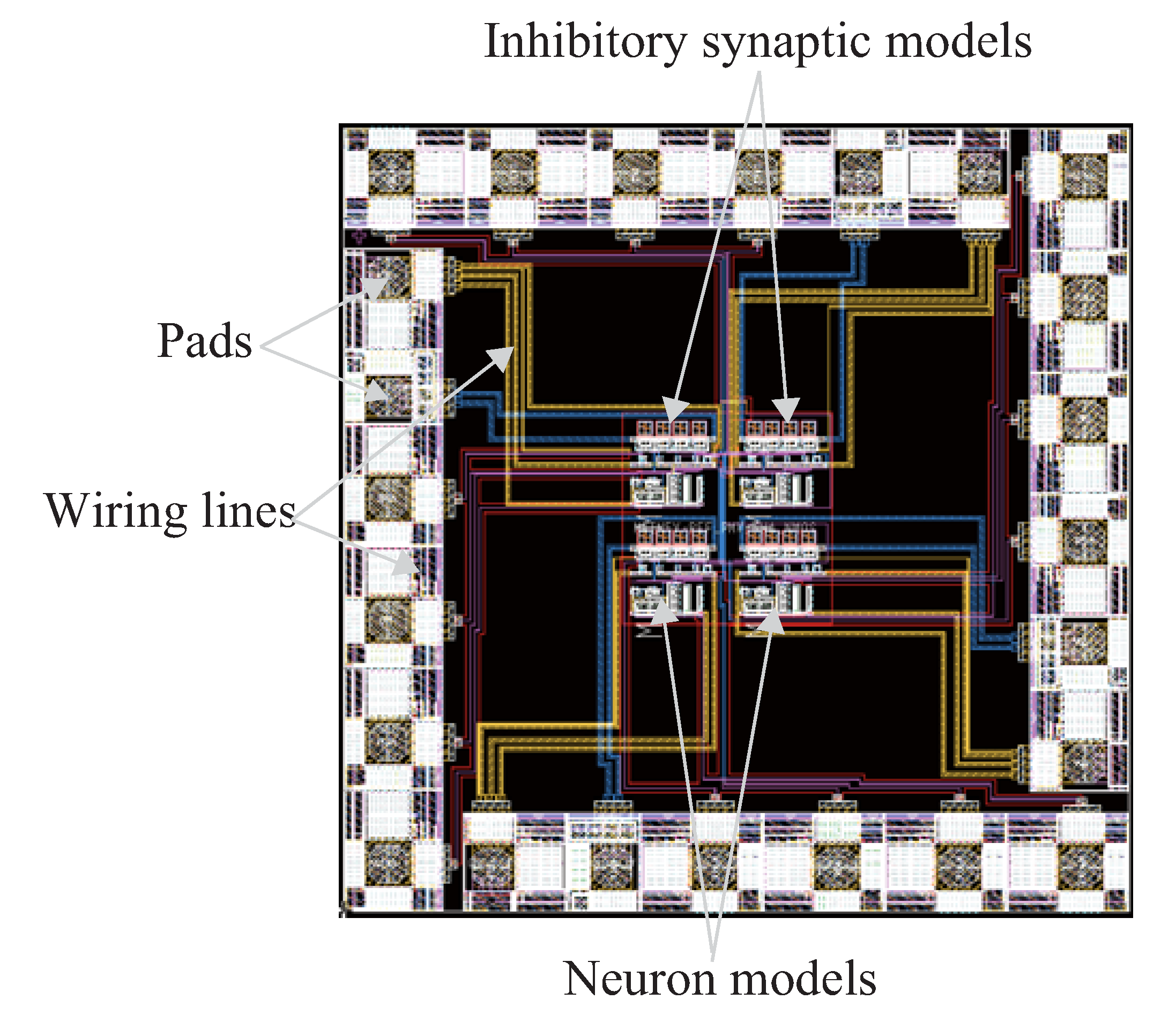
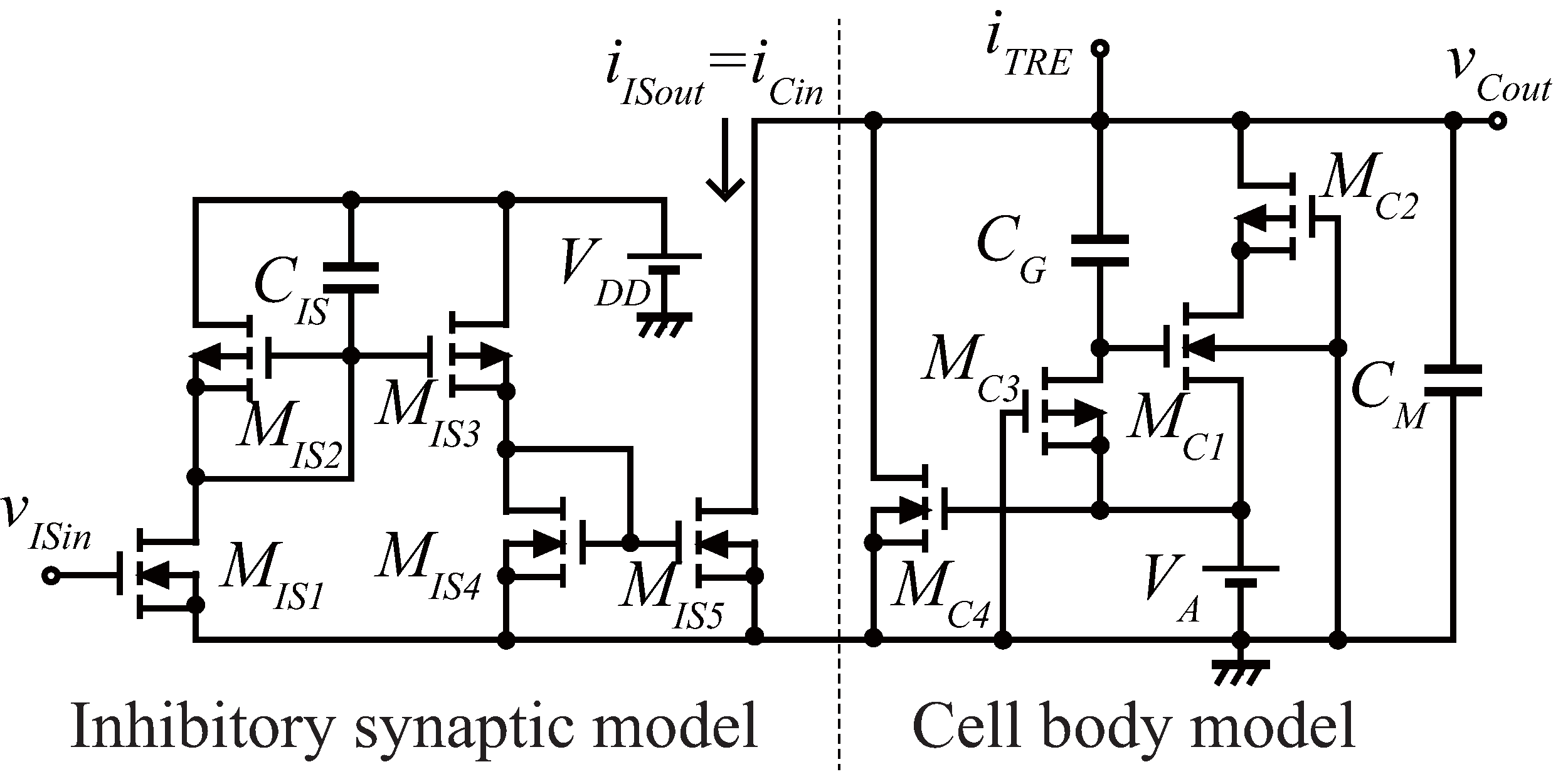
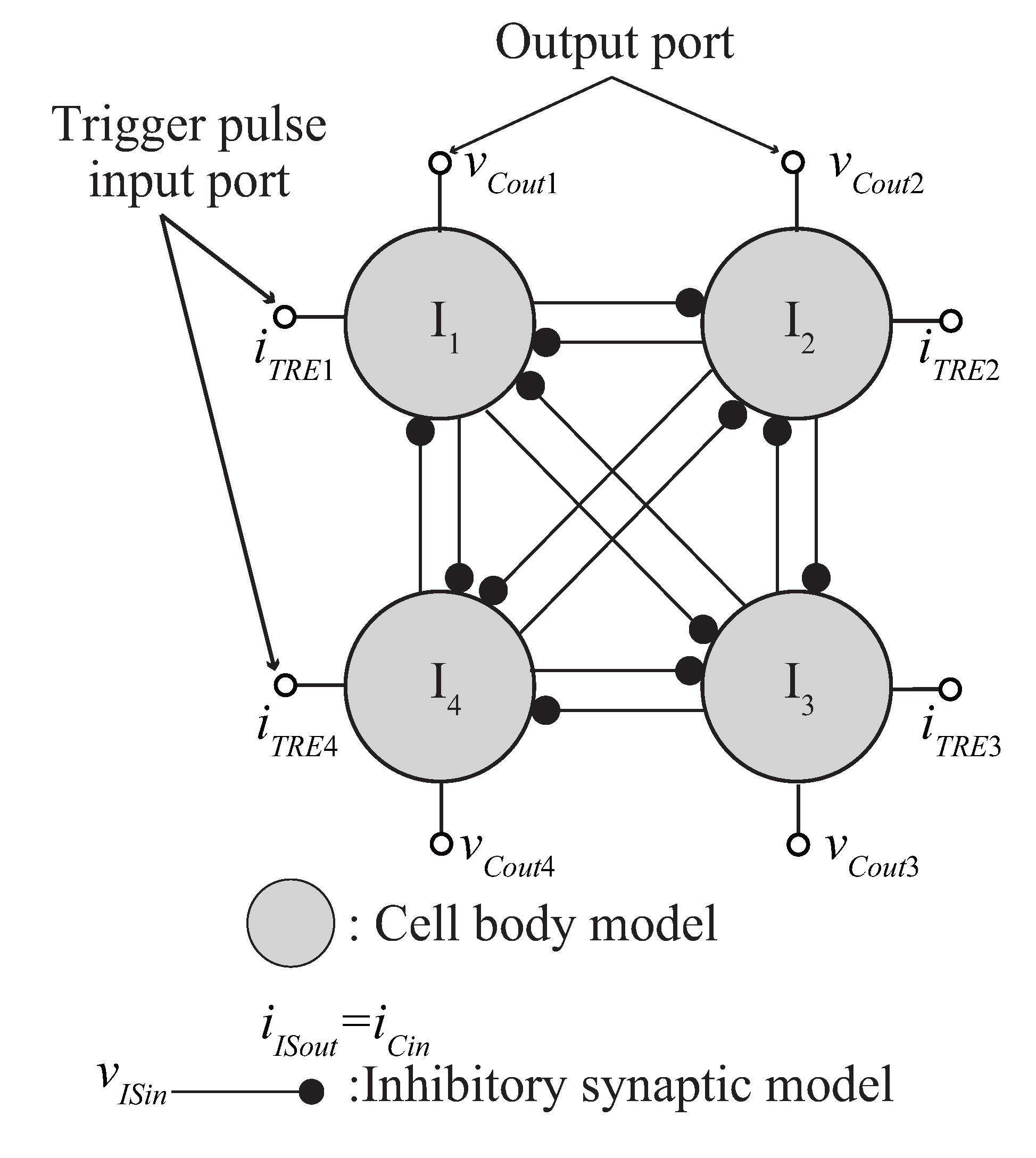
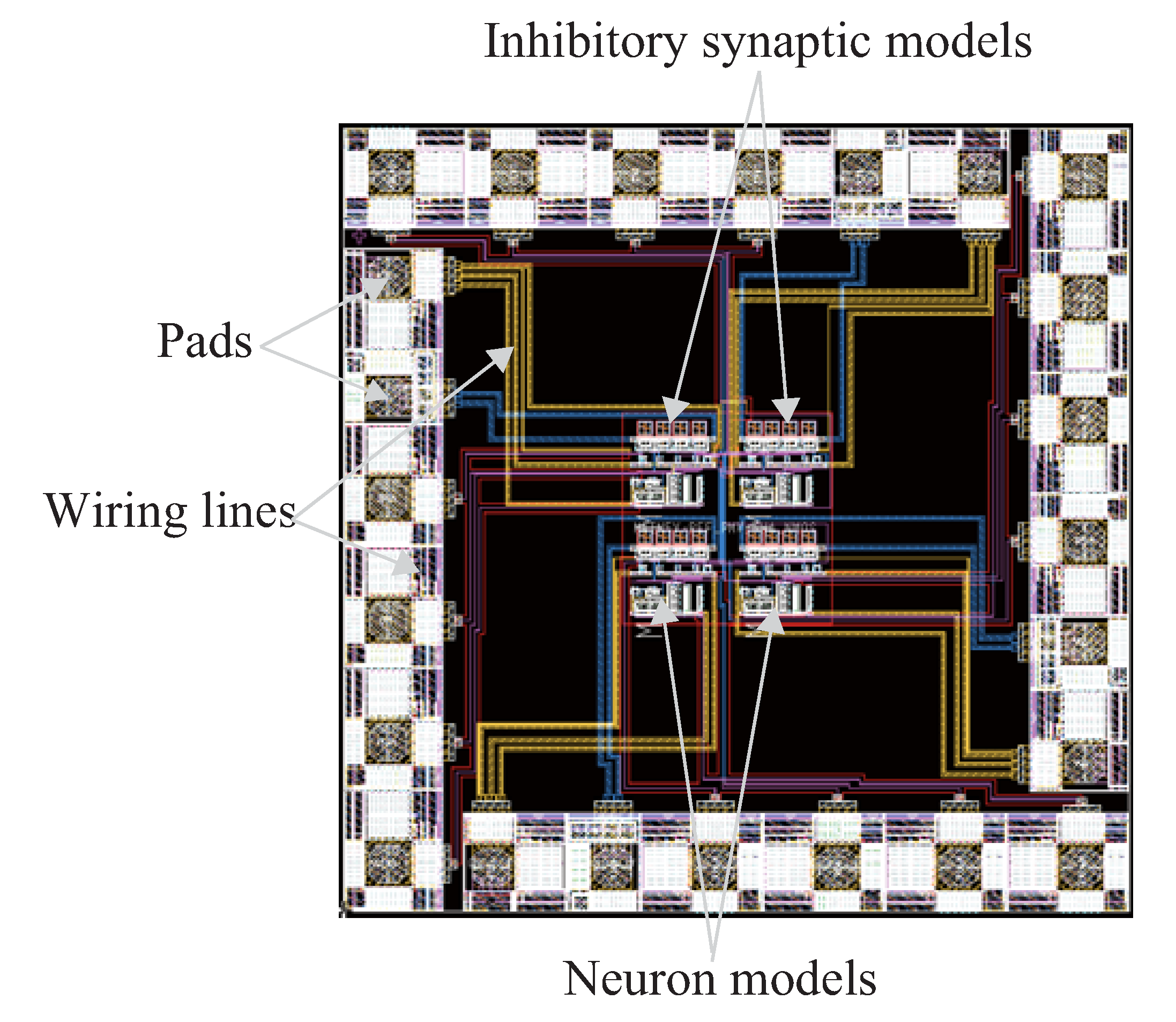
3. Neural Networks Integrated Circuit
4. Results and Discussion
5. Conclusions
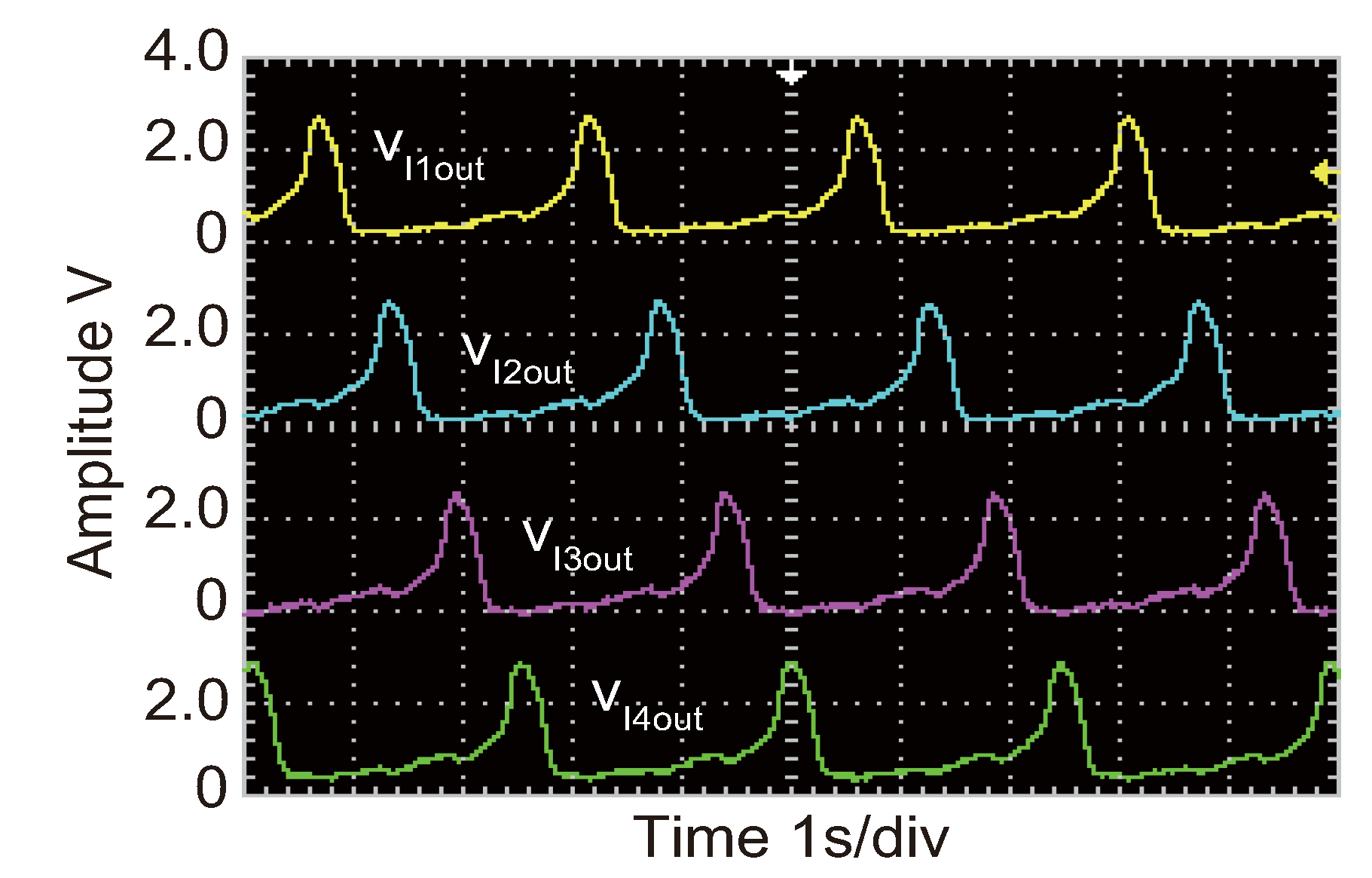
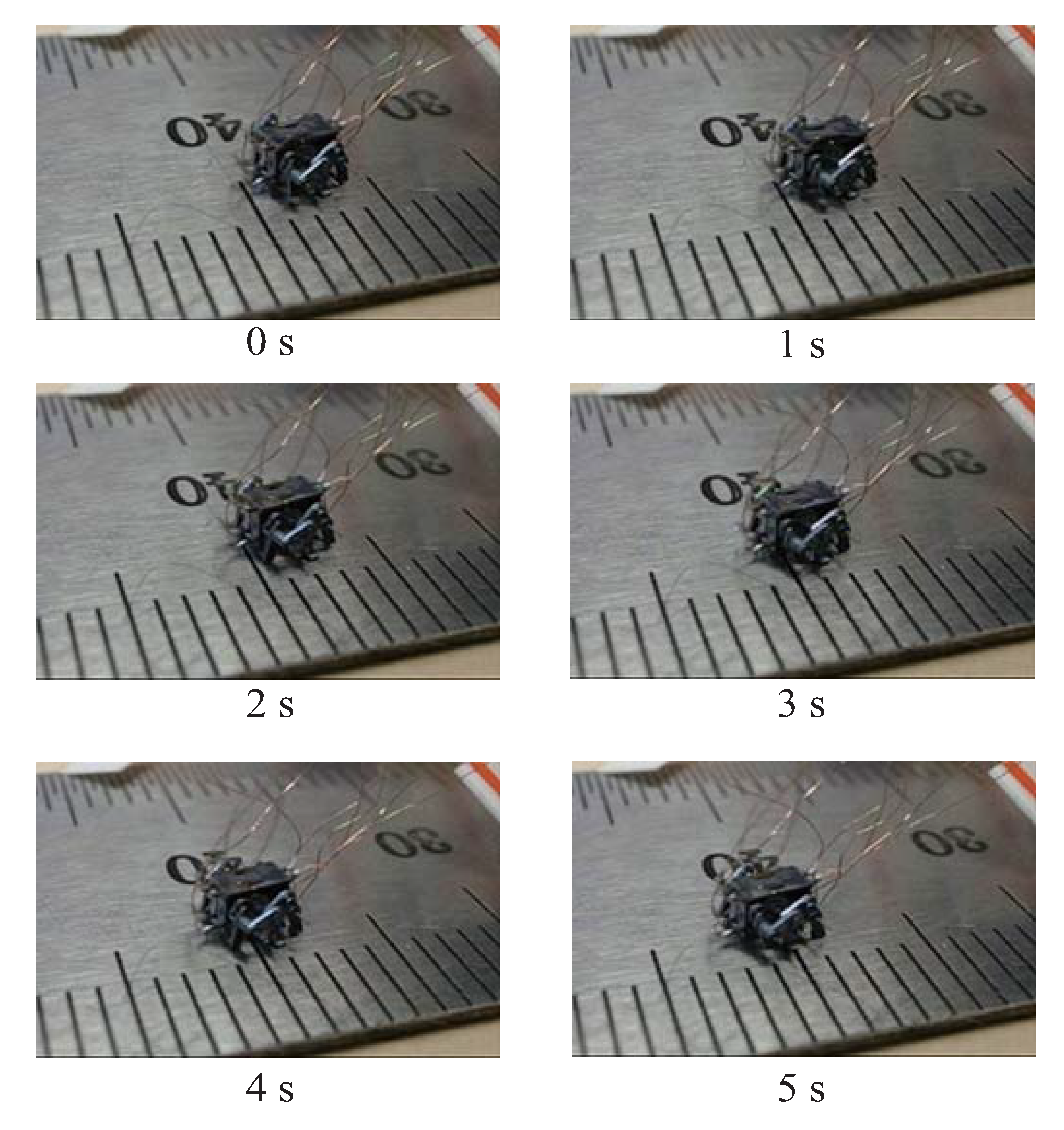
- (a)
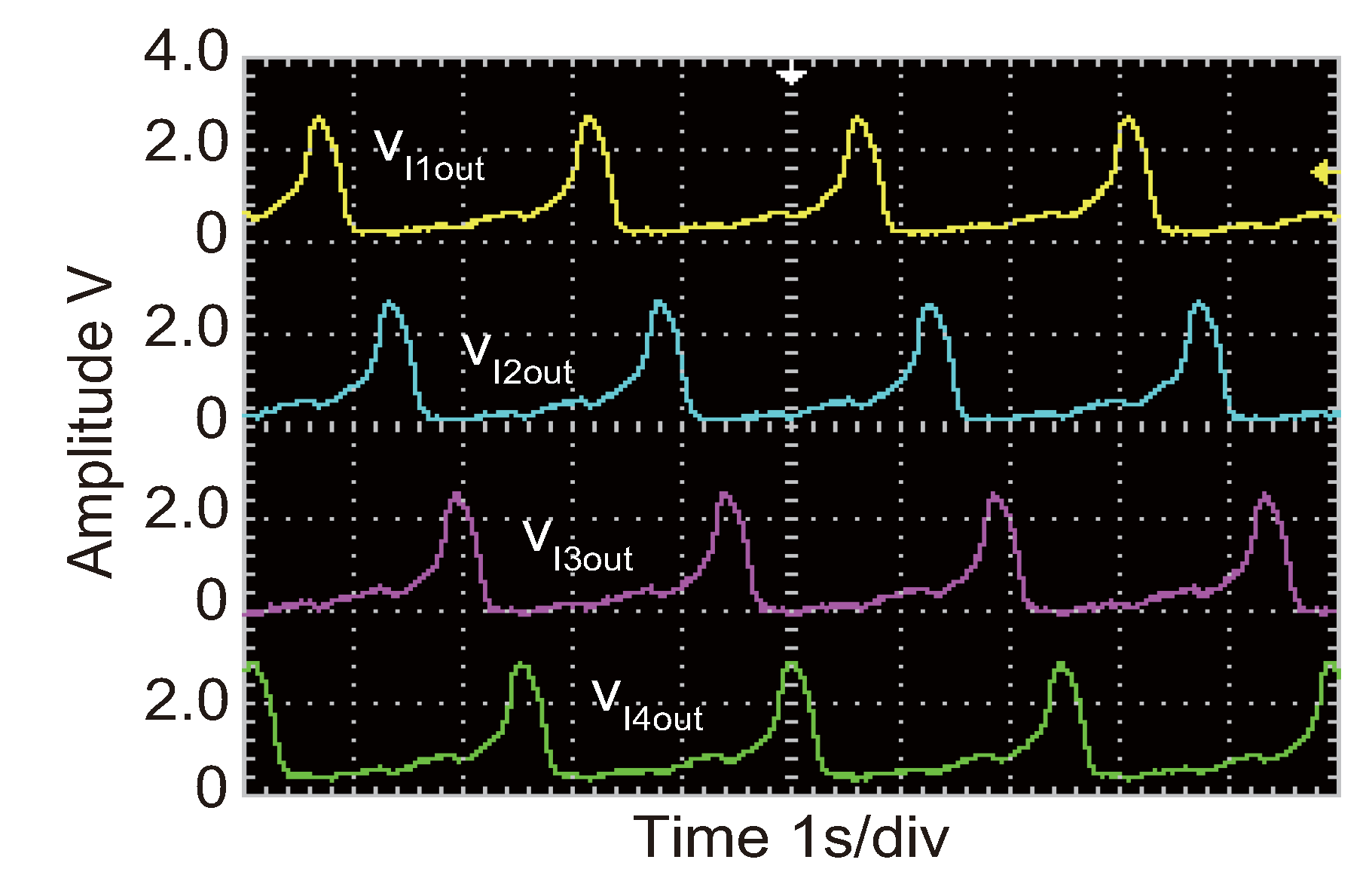
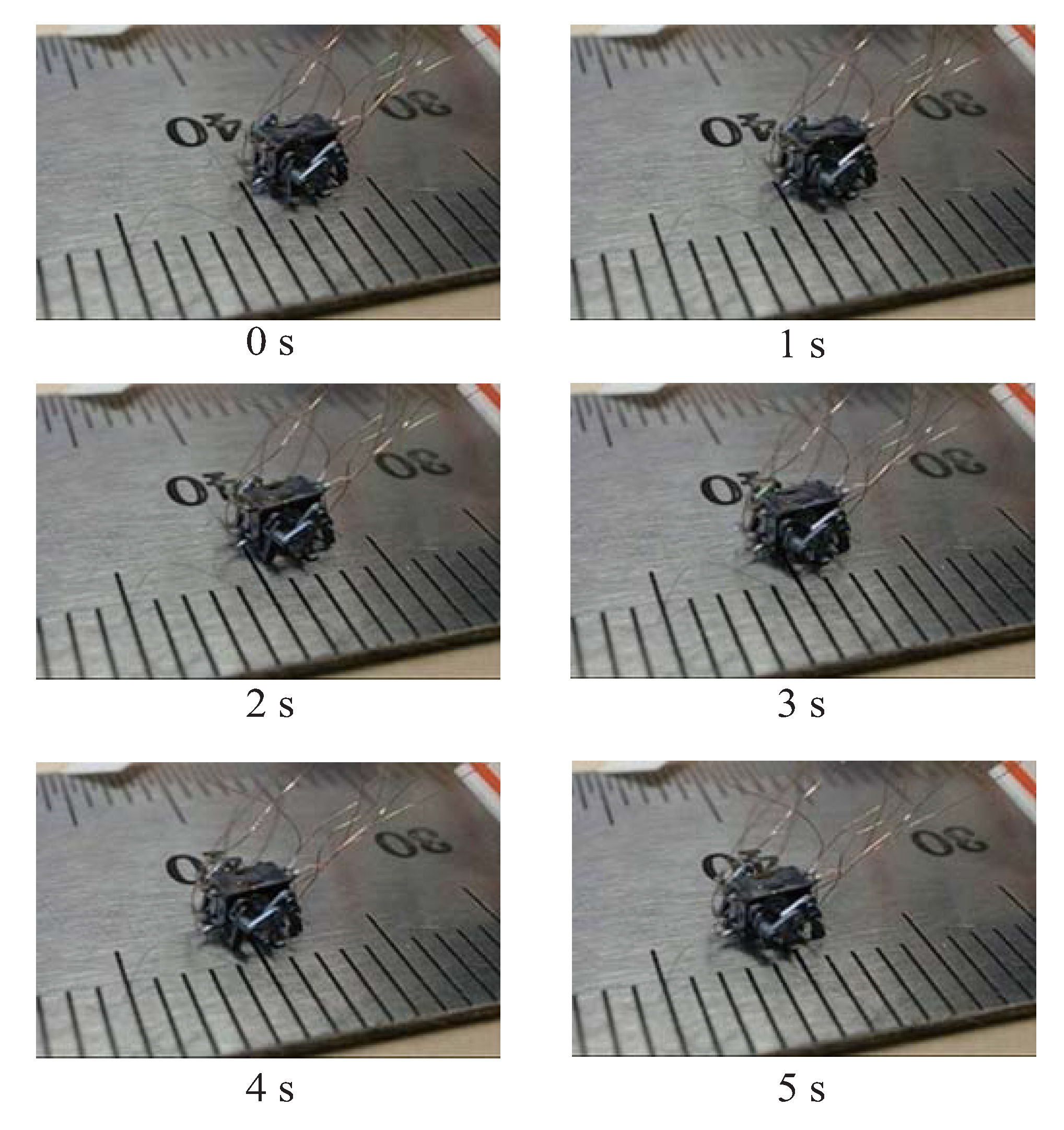
- Neural networks integrated circuit could output the driving pulse which is necessary to actuate the MEMS microrobot. In particular our constructed NNIC can control the movements of MEMS microrobot. The locomotion speed of MEMS microrobot was 26.4 mm/min when the step width was 0.88 mm where the room temperature of measurement environment was 298 K. The power consumption of the microrobot system was 250 mWh. Our MEMS microrobot could locomote by step pattern. Therefore, our robot could locomote more smoothly on the uneven surface compared with the other microrobot.
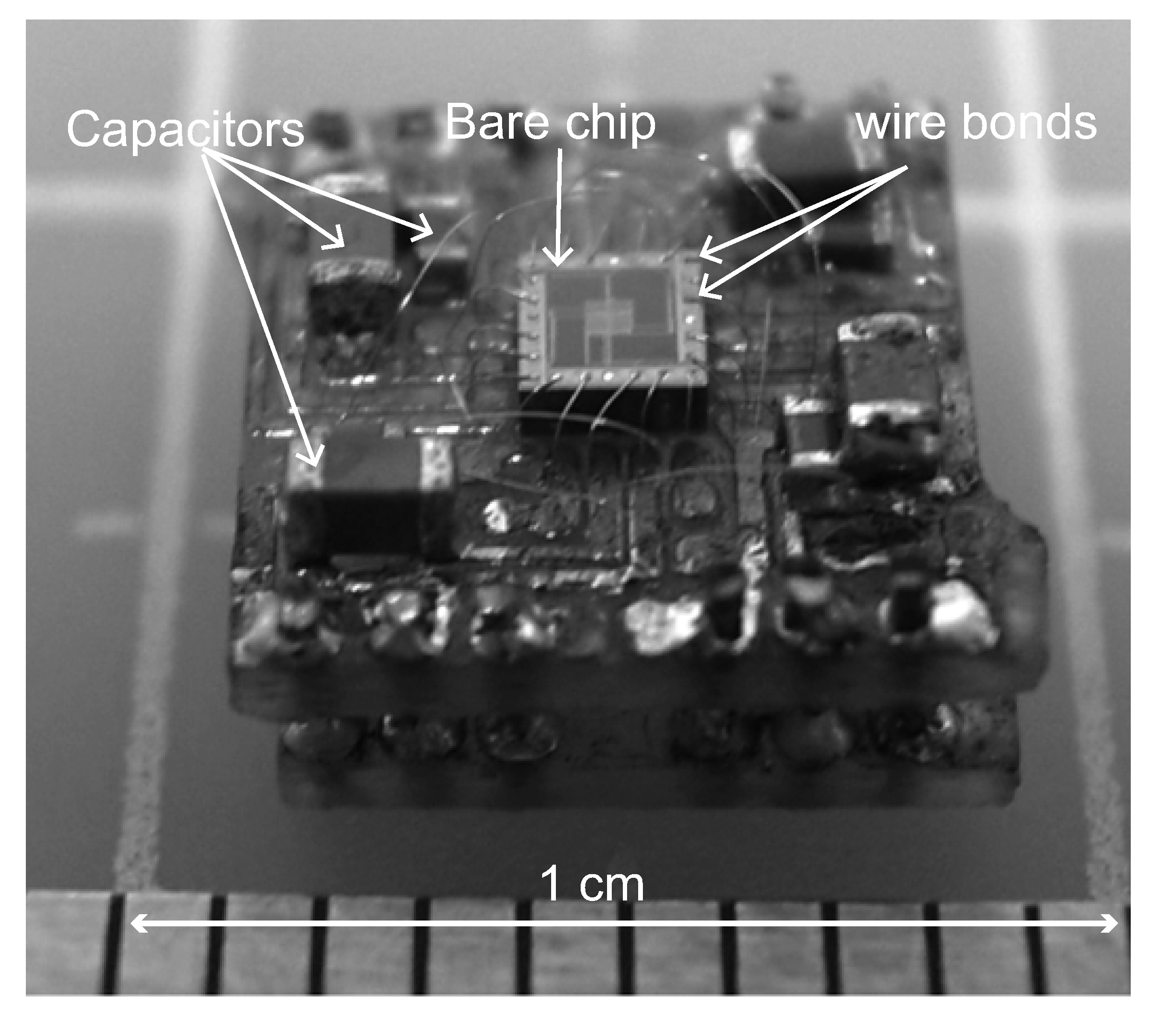
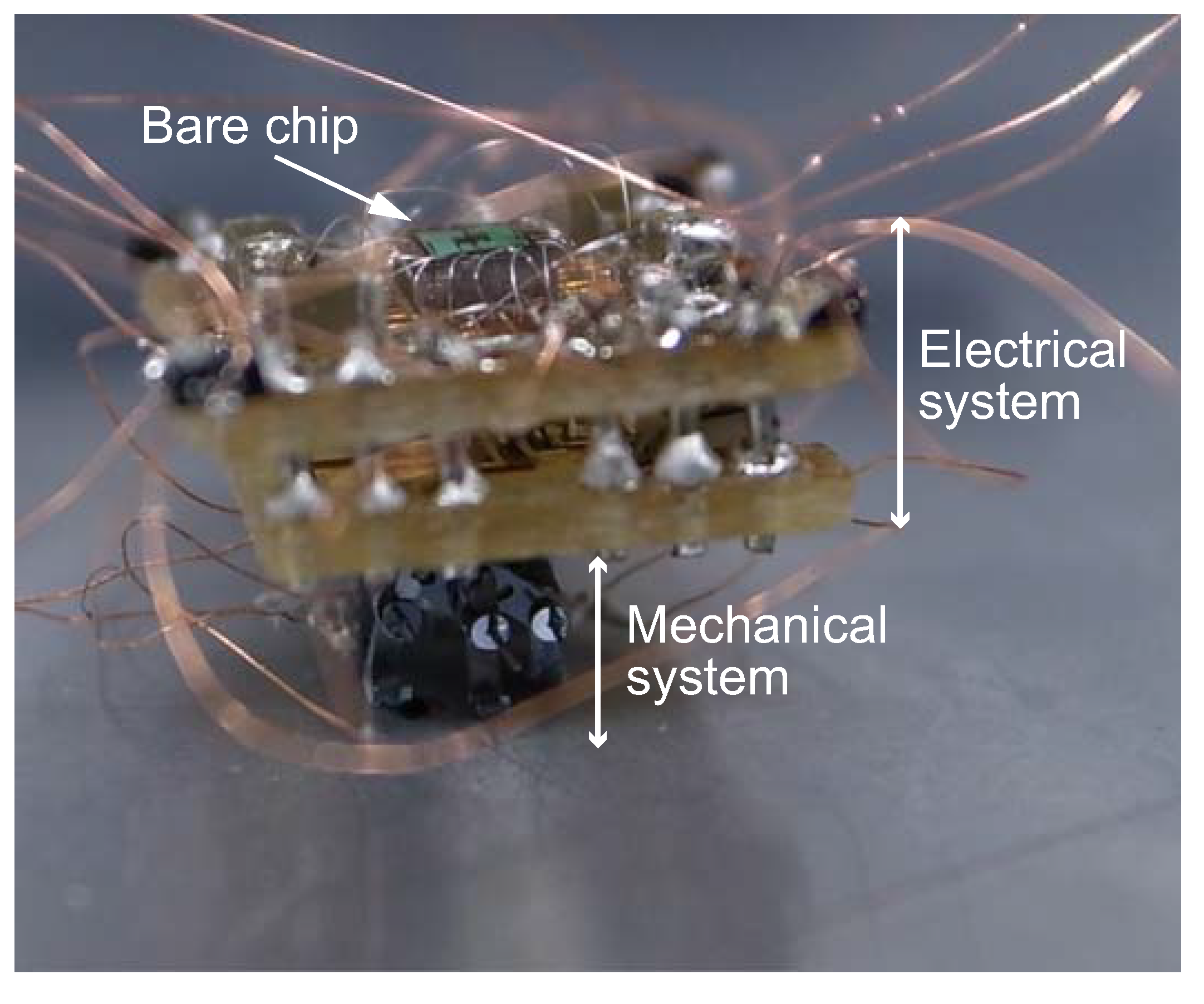
- (b)
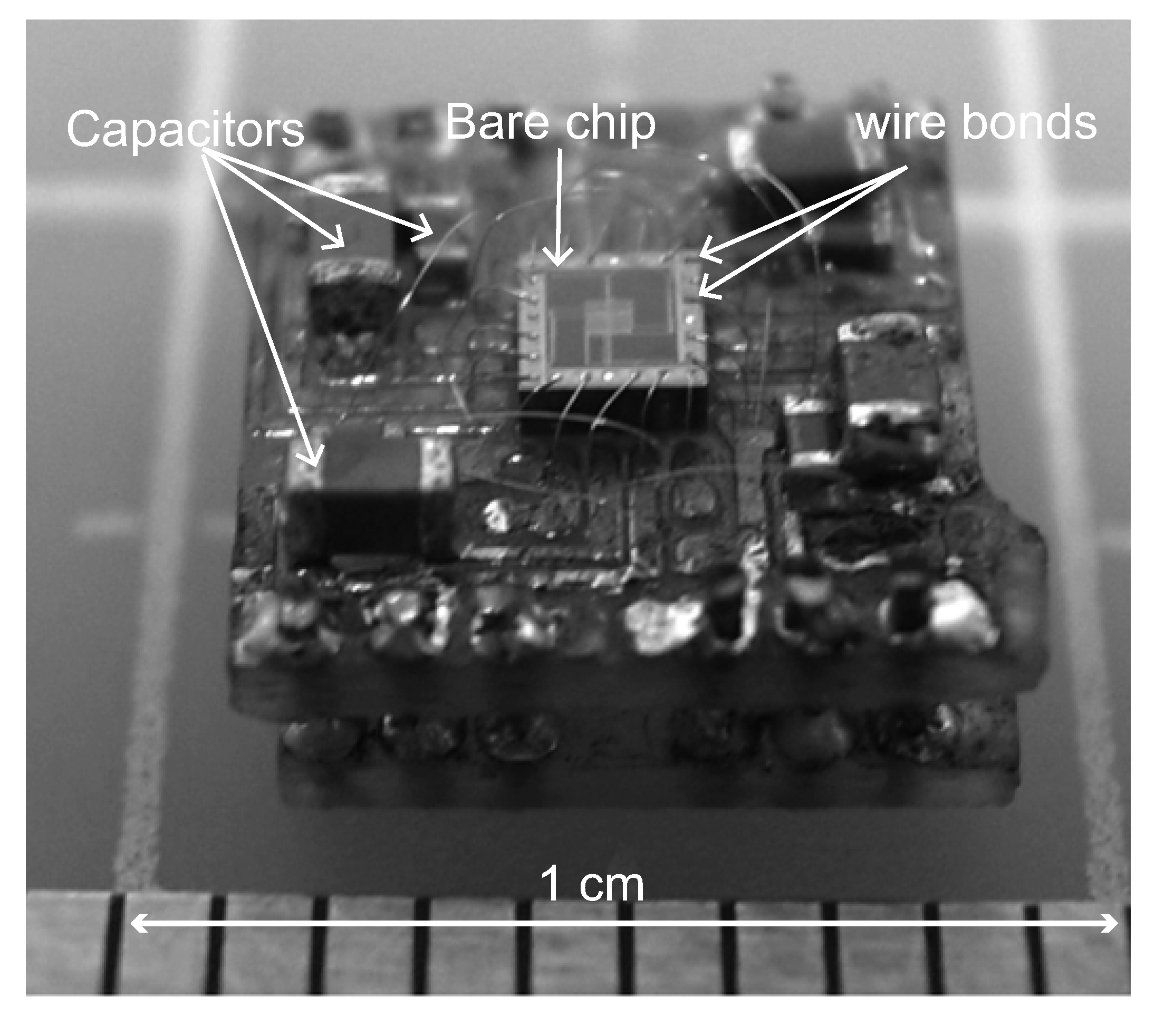
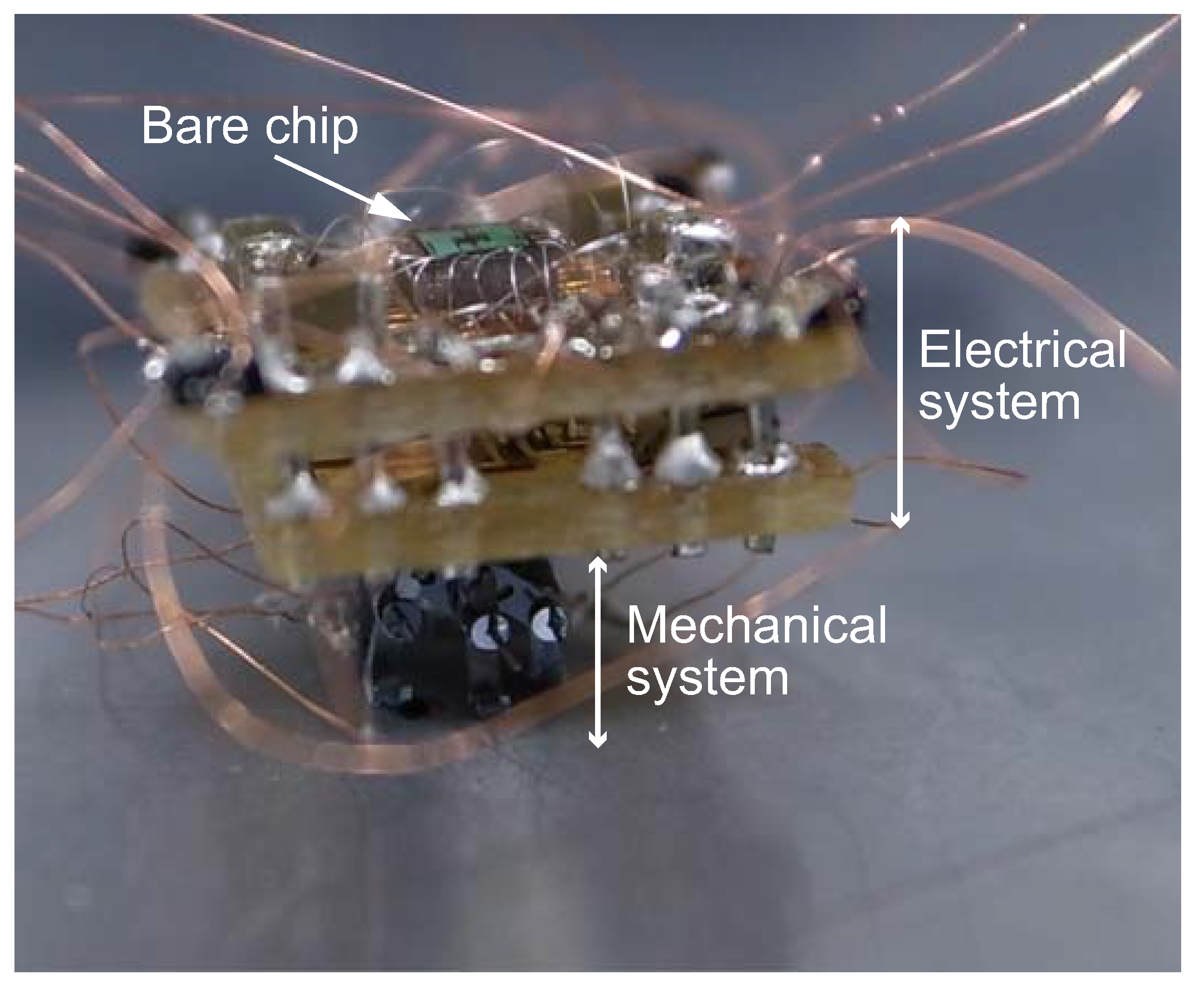
- The NNIC with peripheral circuit was fixed to the FR4 circuit board. The size of the circuit board was 9.4, 7.5 mm width, length size. The weight of the circuit board was 0.31 g.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Shibata, T.; Aoki, Y.; Otsuka, M.; Idogaki, T.; Hattori, T. Microwave Energy Transmission System for Microrobot. IEICE Trans. Electron. 1997, E80-C, 303–308. [Google Scholar]
- Takeda, M. Applications of MEMS to Industrial Inspection. In Proceedings of the 14th IEEE International Conference on Micro Electro Mechanical Systems, Interlaken, Switzerland, 25 January 2001; pp. 182–191.
- Habib, M.K.; Watanabe, K.; Izumi, K. Biomimetcs robots: From bio-inspiration to implementation. In Proceedings of the 33rd Annual Conference of the IEEE Industrial Electronics Society, Taipei, Taiwan, 5–8 November 2007; pp. 143–148.
- Habib, M.K. Biomimetcs: Innovations and Robotics. Int. J. Mechatron. Manuf. Syst. 2011, 4, 113–134. [Google Scholar]
- Baisch, A.T.; Sreetharan, P.S.; Wood, R.J. Biologically-inspired locomotion of a 2 g hexapod robot. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwan, 18–22 October 2010; pp. 5360–5365.
- Tsuruta, K.; Mikuriya, Y.; Ishikawa, Y. Micro sensor developments in Japan. Sensor Rev. 1999, 19, 7–42. [Google Scholar]
- Donald, B.R.; Levey, C.G.; McGray, C.D.; Paprotny, I.; Rus, D. An untethered, electrostatic, globally controllable MEMS micro-robot. J. Microelectromech. Syst. 2006, 15, 1–15. [Google Scholar]
- Edqvist, E.; Snis, N.; Mohr, R.C.; Scholz, O.; Corradi, P.; Gao, J.; Johansson, S. Evaluation of building technology for mass producible millimeter-sized robots using flexible printed circuit boards. J. Micromech. Microeng. 2009, 19, 1–11. [Google Scholar]
- Suematsu, H.; Kobayashi, K.; Ishii, R.; Matsuda, A.; Sekine, Y.; Uchikoba, F. MEMS Type Micro Robot with Artificial Intelligence System. In Proceedings of the International Conference on Electronics Packaging, Beijing, China, 10–13 August 2009; pp. 975–978.
- Tang, W.C.; Nguyen, T.H.; Howe, R.T. Laterally driven poly silicon resonant microstructure. In Proceedings of the IEEE Micro Electro Mechanical Systems. An Investigation of Micro Structures, Sensors, Actuators, Machines and Robots, Fort Lauderdale, FL, USA, 20–22 February 1989; pp. 53–59.
- Sniegowski, J.J.; Garcia, E.J. Surface-micromachined gear trains driven by an on-chip electrostatic microengine. IEEE Electron Device Lett. 1996, 17, 366–368. [Google Scholar] [CrossRef]
- Asada, N.; Matsuki, H.; Minami, K.; Esashi, M. Silicone micromachined two-dimensional galvano optical scanner. IEEE Trans. Magn. 1994, 30, 4647–4649. [Google Scholar] [CrossRef]
- Suzuki, Y.; Tani, K.; Sakuhara, T. Development of a new type piezo electric Micromotor. Transduceres 1999, 99, 1748–1751. [Google Scholar]
- Surbled, P.; Clerc, C.; Pioufle, B.L.; Ataka, M.; Fujita, H. Effect of the composition and thermal annealing on the transformation temperature sputtered TiNi shape memory alloy thin films. Thin Solid Films 2001, 401, 52–59. [Google Scholar] [CrossRef]
- Matsuoka, K. Mechanism of Frequency and Pattern Control in the Neural Rhythm Generators. Biol. Cybern. 1987, 56, 345–353. [Google Scholar] [CrossRef]
- Ikemoto, T.; Nagashino, H.; Kinouchi, Y.; Yoshinaga, T. Transitions in a Four Coupled Neural Oscillator Model. International Symposium on Nonlinear Theory and its Applications. Hilton Hawaiian Village, HI, USA, 29 November–3 December; 1997; pp. 561–564. [Google Scholar]
- Nakada, K.; Asai, T.; Amemiya, Y. An Analog CMOS Central Pattern Generator for Interlimb Coordination in Quadruped Locomotion. IEEE Trans. Neural Netw. 2003, 14, 1356–1365. [Google Scholar] [CrossRef]
- Saito, K.; Matsuda, A.; Saeki, K.; Uchikoba, F.; Sekine, Y. Synchronization of Coupled Pulse-Type Hardware Neuron Models for CPG Model. In The Relevance of the Time Domain to Neural Network Models, Springer Series on Cognitive and Neural Systems; Springer: Berlin, Germay, 2011; pp. 117–133. [Google Scholar]
- Bhardwaj, J.K.; Ashraf, H. Advanced silicon etching using high-density plasmas. In Proceedings of the SPIE Micromachining and Micro fabrication Process Technology, Austin, TX, USA, 19 September 1995; Volume 2639, pp. 224–233.
- Homma, D. Metal Artificial Muscle Bio Metal Fiber. RSJ 2003, 21, 22–24. [Google Scholar]
- Toki Corporation’s Homepage. Available online: http://www.toki.co.jp (accessed on 30 March 2014).
- Okazaki, K.; Ogiwara, T.; Yang, D.; Sakata, K.; Saito, K.; Sekine, Y.; Uchikoba, F. Development of pulse control type MEMS micro robot with hardware neural network. Artif. Life Robot. 2011, 16, 229–233. [Google Scholar] [CrossRef]
- Saito, K.; Takato, M.; Sekine, Y.; Uchikoba, F. Biomimetics Micro Robot with Active Hardware Neural Networks Locomotion Control and Insect-Like Switching Behaviour. Int. J. Adv. Robot. Syst. 2012. [Google Scholar] [CrossRef]
- Micro Robot and Neural Networks Laboratory. Available online: http://www.eme.cst.nihon-u.ac.jp/~uchikoba/ (accessed on 30 March 2014).
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Saito, K.; Maezumi, K.; Naito, Y.; Hidaka, T.; Iwata, K.; Okane, Y.; Oku, H.; Takato, M.; Uchikoba, F. Neural Networks Integrated Circuit for Biomimetics MEMS Microrobot. Robotics 2014, 3, 235-246. https://doi.org/10.3390/robotics3030235
Saito K, Maezumi K, Naito Y, Hidaka T, Iwata K, Okane Y, Oku H, Takato M, Uchikoba F. Neural Networks Integrated Circuit for Biomimetics MEMS Microrobot. Robotics. 2014; 3(3):235-246. https://doi.org/10.3390/robotics3030235
Chicago/Turabian StyleSaito, Ken, Kazuaki Maezumi, Yuka Naito, Tomohiro Hidaka, Kei Iwata, Yuki Okane, Hirozumi Oku, Minami Takato, and Fumio Uchikoba. 2014. "Neural Networks Integrated Circuit for Biomimetics MEMS Microrobot" Robotics 3, no. 3: 235-246. https://doi.org/10.3390/robotics3030235
APA StyleSaito, K., Maezumi, K., Naito, Y., Hidaka, T., Iwata, K., Okane, Y., Oku, H., Takato, M., & Uchikoba, F. (2014). Neural Networks Integrated Circuit for Biomimetics MEMS Microrobot. Robotics, 3(3), 235-246. https://doi.org/10.3390/robotics3030235