
Optimizing Task Offloading for Power Line Inspection in Smart Grid Networks with Edge Computing: A Game Theory Approach

Abstract
1. Introduction
- Proposing an Improved Game-Theory-Based Distributed Computation Offloading Strategy: This paper improves upon existing game-theory-based distributed computation offloading strategies by optimizing task allocation and prioritization, enhancing resource utilization, and significantly reducing latency.
- Constructing a Power Grid Inspection Offloading Scenario: Utilizing Python, this paper constructs a power grid inspection offloading scenario to study and enhance various offloading strategies, revealing issues with high latency and low resource utilization in existing strategies through simulation analysis.
- Integrating Local and Edge Computing Resources: In this paper, we introduce a method for integrating local and edge computing resources, proposing an optimized task allocation strategy that enhances resource utilization and significantly reduces communication latency.
- Validating Through Simulation Results: Simulation results demonstrate that the proposed improved strategy effectively lowers communication latency, enhances system performance, and increases resource utilization in the power grid inspection context, providing valuable insights for related research.
2. Related Works
3. System Model
- Computation resource allocation: When multiple power line inspection robots concurrently submit computation tasks to MEC servers, the allocation of resources becomes crucial. Inspection robots must consider factors such as latency, energy consumption, as well as the load and availability of each MEC server to determine the most suitable server for task offloading.
- Task partitioning: Each power line inspection robot’s computational task can be partitioned into distinct segments, which are then assigned for processing either locally or offloaded to MEC servers. In this study, the tasks of each power line inspection robot are divided into 100 sub-tasks, and decisions are made regarding the allocation of these sub-tasks to optimize processing efficiency. This approach aims to maximize the utilization of local computational resources while alleviating the computational burden on power line inspection robots, thereby enhancing offloading efficiency.
- Task prioritization: In the power grid context, tasks exhibit varying degrees of urgency and priority. For example, tasks related to emergency fault detection take precedence over routine inspection tasks. Therefore, assigning priorities to tasks and considering them during task allocation are essential in determining the optimal task scheduling strategy within the power line inspection robots and MEC integration scenario.
3.1. Communication Model
3.2. Computing Model
- (1)
- Local Computation
- (2)
- Central Server Computation Offloading
4. Problem Formulation
5. Proposed Algorithm
5.1. Offloading Environment Perception Phase
5.2. Offloading Decision and Task Allocation Decision Update Phase
| Algorithm 1: Game-Theoretic Distributed Computational Offloading Strategy Improvement Algorithm |
|
6. Simulation Results and Discussions
6.1. Simulation Experiment Settings
- (1)
- Fully Local Computing
- (2)
- Binary Offloading Computation
6.2. Simulation Results
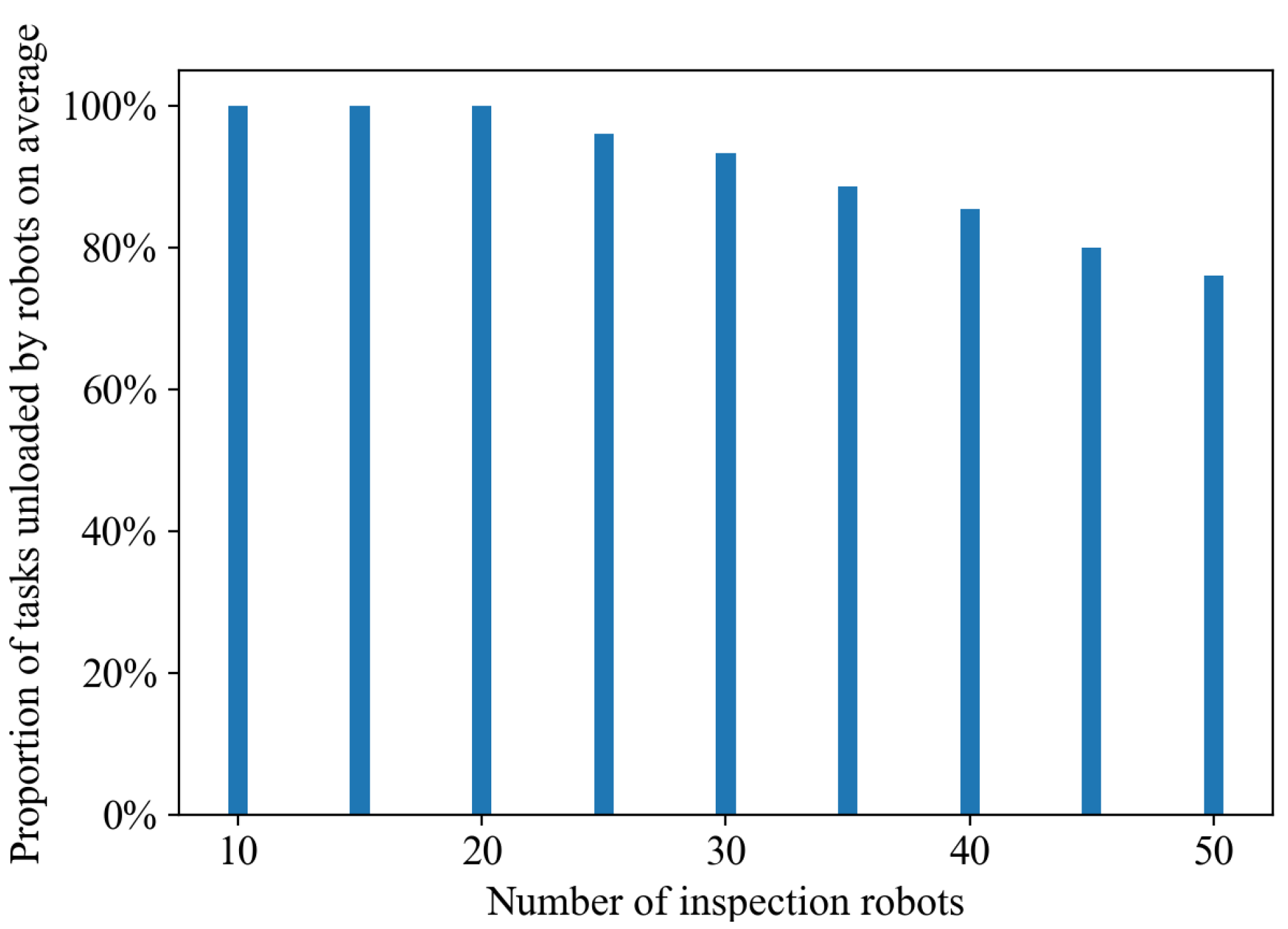
- (1)
- Task Allocation Strategy
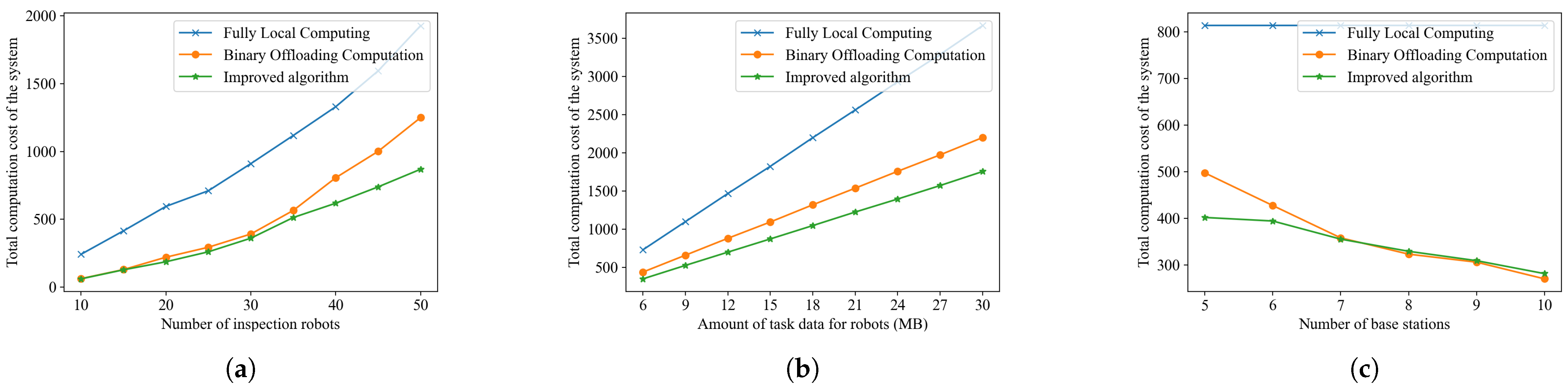
- (2)
- Task Computation Total Cost
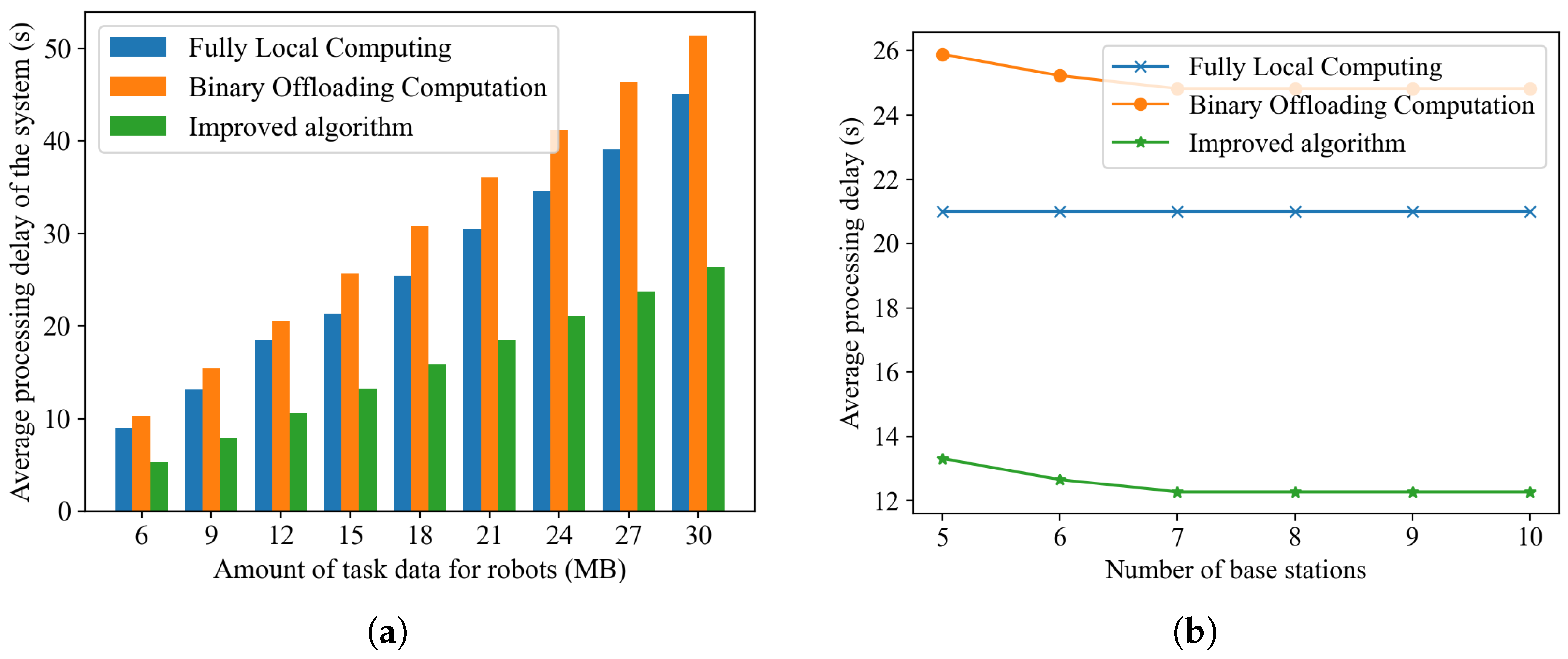
- (3)
- Task Average Processing Delay
- (4)
- Task Average Processing Energy Consumption
7. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Abbas, N.; Zhang, Y.; Taherkordi, A.; Skeie, T. Mobile Edge Computing: A Survey. IEEE Internet Things J. 2018, 5, 450–465. [Google Scholar] [CrossRef]
- Ceselli, A.; Premoli, M.; Secci, S. Mobile Edge Cloud Network Design Optimization. IEEE/ACM Trans. Netw. 2017, 25, 1818–1831. [Google Scholar] [CrossRef]
- Wang, W.; Qu, R.; Liao, H.; Wang, Z.; Zhou, Z.; Wang, Z.; Mumtaz, S.; Guizani, M. 5G MEC-Based Intelligent Computation Offloading in Power Robotic Inspection. IEEE Wirel. Commun. 2023, 30, 66–74. [Google Scholar] [CrossRef]
- Li, Z.; Yan, F.; Xu, X.; Xia, W.; Shen, L. Model-Based Trajectory Planning of a Hybrid Robot for Powerline Inspection. IEEE Robot. Autom. Lett. 2024, 9, 3443–3450. [Google Scholar] [CrossRef]
- Devi, K.V.R.; Koithyar, A.; Lakhanpal, S.; Parmar, A.; Sethi, V.A.; Ftaiet, A.A. Edge Computing and 5G Integration for Real-time Analytics in Interoperable Smart Grids. In Proceedings of the 2023 International Conference on Power Energy, Environment & Intelligent Control (PEEIC), Greater Noida, India, 19–23 December 2023; pp. 419–424. [Google Scholar]
- Lin, X.; Yan, F.; Li, Z.; Xu, X.; Xia, W.; Shen, L. PPO Based Computation Offloading and Resource Allocation Algorithm in Smart Grids. In Proceedings of the 2023 9th International Conference on Computer and Communications (ICCC), Chengdu, China, 8–11 December 2023; pp. 243–248. [Google Scholar]
- Liu, P.; Wang, J.; Ma, K.; Guo, Q. Joint Cooperative Computation and Communication for Demand-Side NOMA-MEC Systems With Relay-Assisted in Smart Grid Communications. IEEE Internet Things J. 2024. early access. [Google Scholar] [CrossRef]
- Saleh, T.; Anwar, A.; Elmusrati, M.; Kauhaniemi, K.; Välisuo, P. Virtualized Intelligent Relaying of Smart Grid Over 5G Network. In Proceedings of the 2024 International Workshop on Artificial Intelligence and Machine Learning for Energy Transformation (AIE), Vaasa, Finland, 20–22 May 2024; pp. 1–6. [Google Scholar]
- Fakhari, A.; Mostashfi, A. LinBot—Design, Analysis, and Field Test of a Novel Power Transmission Lines Inspection Robot. In Proceedings of the 2019 7th International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 20–21 November 2019; pp. 132–137. [Google Scholar]
- Zou, D.; Liu, L.; Jiang, Z.; Luo, B.; Quan, W. Design and Dynamic Simulation of Single-arm Inspection Robot System for Transmission Lines. In Proceedings of the 2023 International Conference on Advanced Robotics and Mechatronics (ICARM), Sanya, China, 8–10 July 2023; Volume 5, pp. 1210–1213. [Google Scholar]
- Xiaojie, Z.; Yi, R.; Jian, Z. The research application of inspection robot for the smart grid. In Proceedings of the 2011 International Conference on Consumer Electronics, Communications and Networks (CECNet), Xianning, China, 16–18 April 2011; pp. 2776–2779. [Google Scholar]
- Sumanth, Srivastav, A.; Sagar, R.; Malik, M.A.; Vishwanath, M.N. Mechanism, Design and Kinematics for a Transmission Line Inspection Robot. In Proceedings of the 2021 2nd International Conference for Emerging Technology (INCET), Belagavi, India, 21–23 May 2021; pp. 1–7. [Google Scholar]
- Zhu, P.; Zhu, A.; Zhang, Q.; Wang, Y.; Zhang, X.; Cao, G. Design of Gibbon-Like Crawling Robot for High Voltage Transmission Line Inspection. In Proceedings of the 2019 16th International Conference on Ubiquitous Robots (UR), Jeju, Republic of Korea, 24–27 June 2019; Volume 5, pp. 16–20. [Google Scholar]
- Zhu, A.; Tu, Y.; Zheng, W.; Shen, H.; Zhang, X. Design and Implementation of High-Voltage Transmission Line Inspection and Foreign Bodies Removing Robot. In Proceedings of the 2018 15th International Conference on Ubiquitous Robots (UR), Honolulu, HI, USA, 26–30 June 2018; pp. 852–856. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indicator/Method | Our Paper: Optimizing Task Offloading for Power Line Inspection | PPO-Based Computation Offloading and Resource Allocation [3] | 5G MEC-Based Intelligent Computation Offloading in Power Robotic Inspection [6] |
|---|---|---|---|
| Objective | Minimize task offloading cost and improve system utility | Minimize energy consumption and delay | Optimize task offloading and route planning to reduce delay |
| Approach | Multi-agent dynamic optimization based on game theory | Proximal Policy Optimization (PPO) algorithm | AI-enabled multi-dimensional collaborative optimization algorithm |
| Methodological Novelty |
|
|
|
| Parameter | Value | Description |
|---|---|---|
| M | 5, 6, 7, …, 10 | Number of base stations |
| N | 10, 15, 20, …, 50 | Number of inspection robots |
| V | 1 or 2 m/s | Robot speed |
| R | 3000 m | Base station coverage radius |
| 0.7 | High-latency-sensitive robot weight | |
| 0.5 | Medium-latency-sensitive robot weight | |
| 0.3 | Low-latency-sensitive robot weight | |
| [5, 30] MB | Task data size | |
| [500, 3000] Megacycles | CPU cycles required by task | |
| B | 5 MHz | Channel bandwidth |
| −125 dBm | Gaussian white noise power | |
| 100 mW | robot device transmission power | |
| 10 GHz | MEC server computational capacity | |
| 10 GHz | Local computational capacity |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, X.; Yuan, S.; Nian, Z.; Mu, C.; Li, X. Optimizing Task Offloading for Power Line Inspection in Smart Grid Networks with Edge Computing: A Game Theory Approach. Information 2024, 15, 441. https://doi.org/10.3390/info15080441
Lu X, Yuan S, Nian Z, Mu C, Li X. Optimizing Task Offloading for Power Line Inspection in Smart Grid Networks with Edge Computing: A Game Theory Approach. Information. 2024; 15(8):441. https://doi.org/10.3390/info15080441
Chicago/Turabian StyleLu, Xu, Sihan Yuan, Zhongyuan Nian, Chunfang Mu, and Xi Li. 2024. "Optimizing Task Offloading for Power Line Inspection in Smart Grid Networks with Edge Computing: A Game Theory Approach" Information 15, no. 8: 441. https://doi.org/10.3390/info15080441
APA StyleLu, X., Yuan, S., Nian, Z., Mu, C., & Li, X. (2024). Optimizing Task Offloading for Power Line Inspection in Smart Grid Networks with Edge Computing: A Game Theory Approach. Information, 15(8), 441. https://doi.org/10.3390/info15080441