
Numerical Simulation of Wave-Induced Scour in Front of Vertical and Inclined Breakwaters


Abstract
1. Introduction
2. Materials and Methods
2.1. Wave Field Model
2.2. Sediment Transport Model
2.2.1. Continuity Equation for Bedload and Suspended Sediment Transport
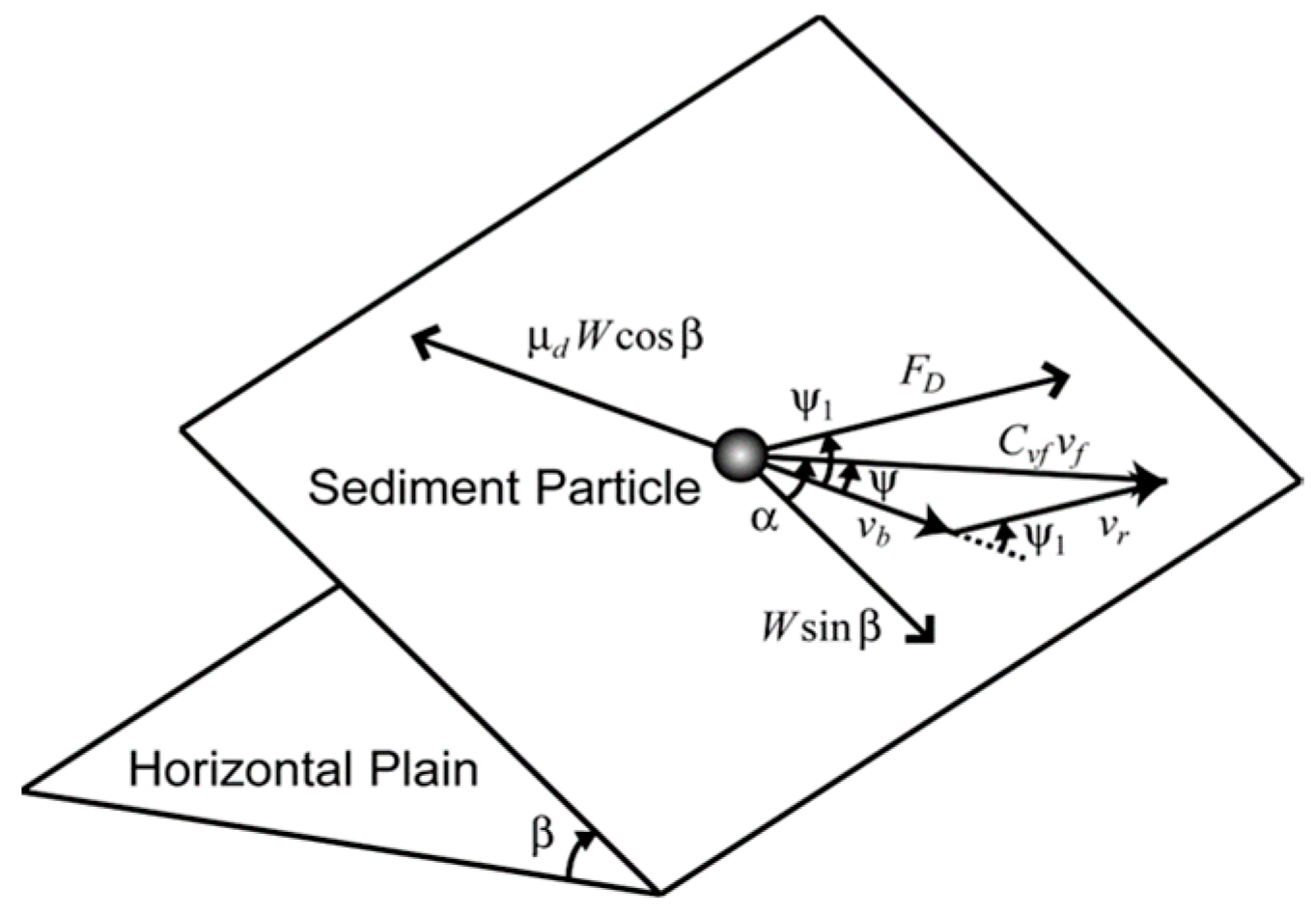
2.2.2. Bedload Sediment Transport Model
2.2.3. Suspended Sediment Transport Model
2.2.4. Slope Failure Model
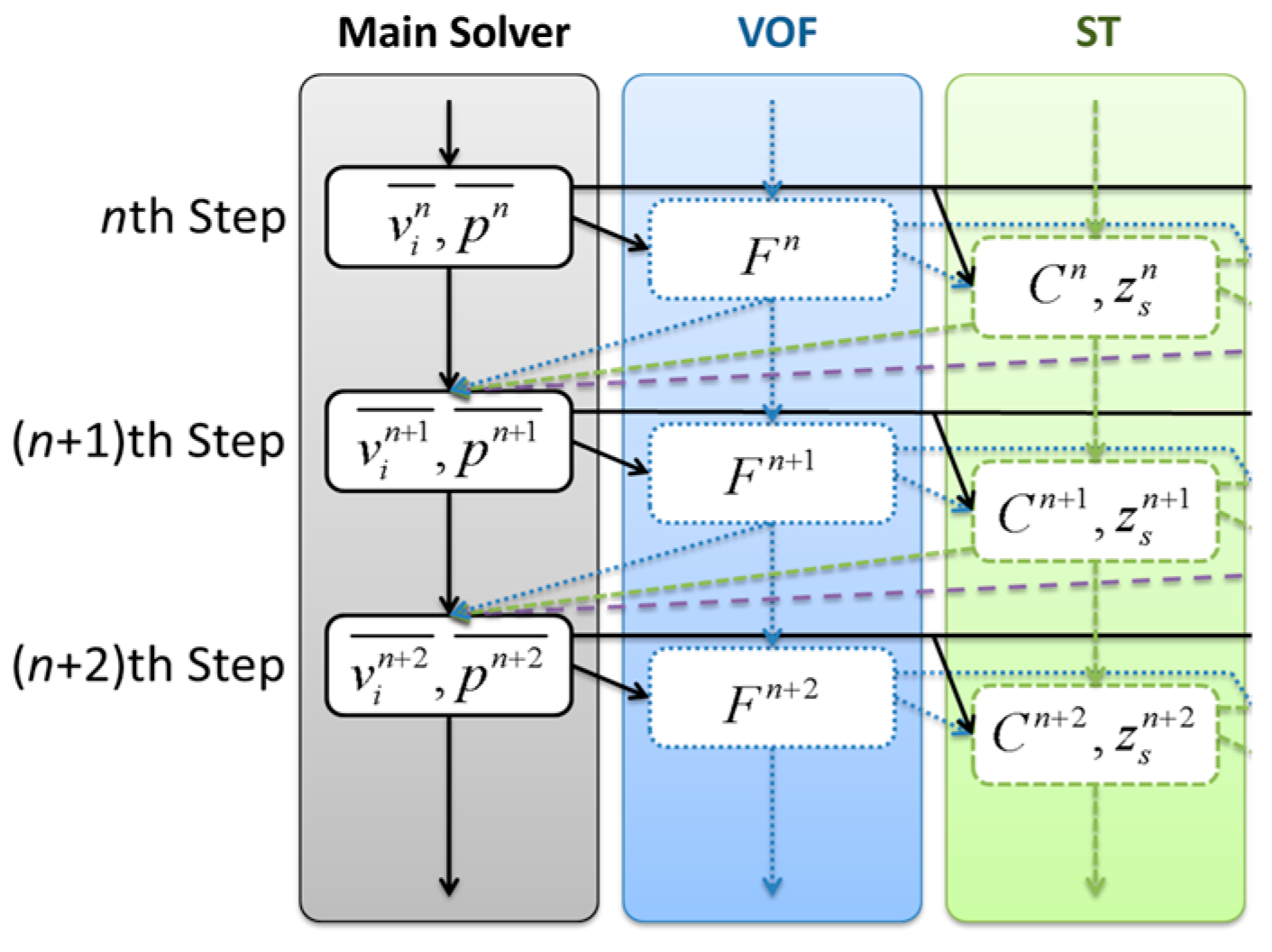
2.3. Coupling of Wave Field and Sediment Transport
3. Model Validation
3.1. Experimental Case Set-Up
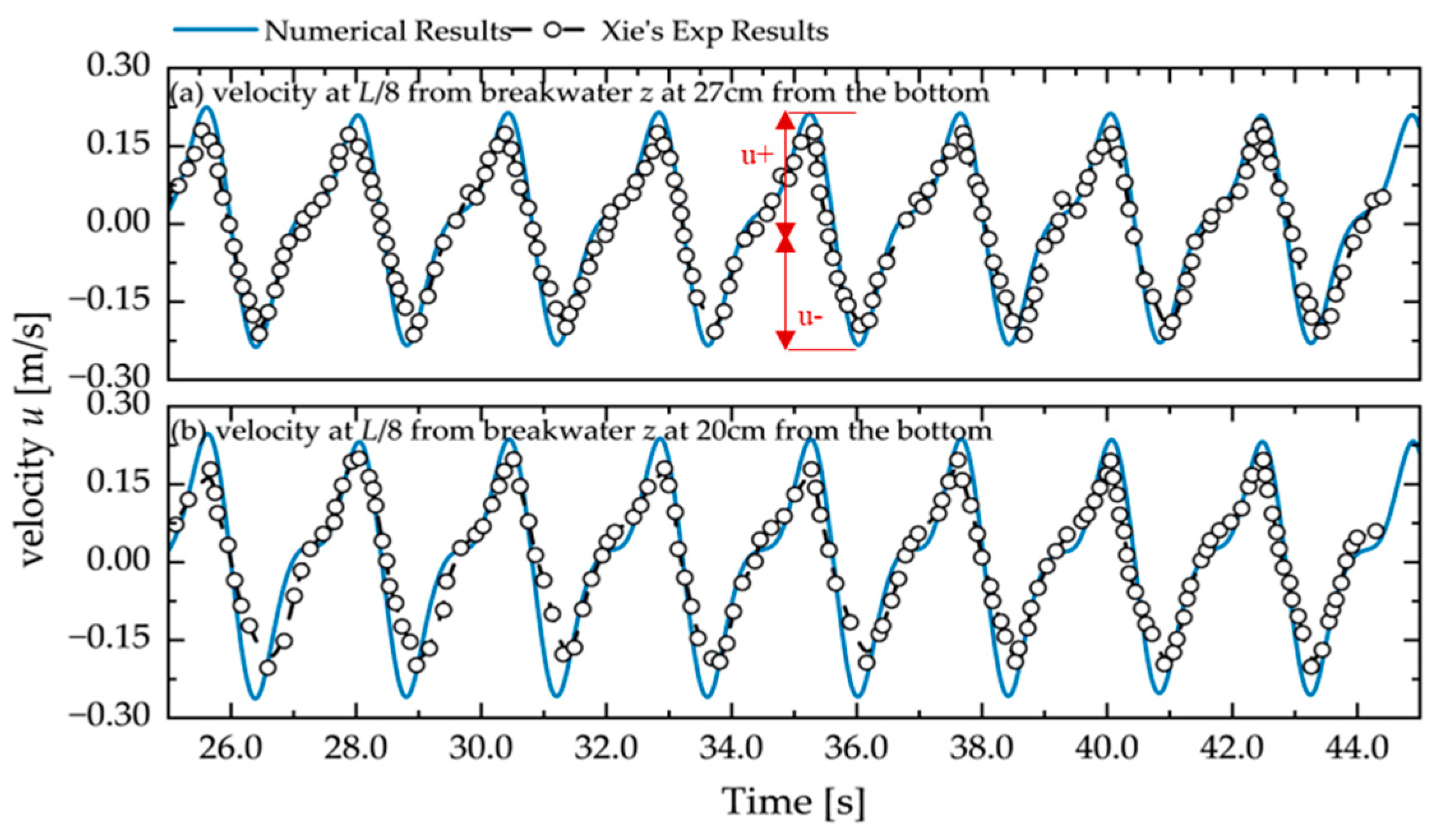
3.2. Wave Field Validation
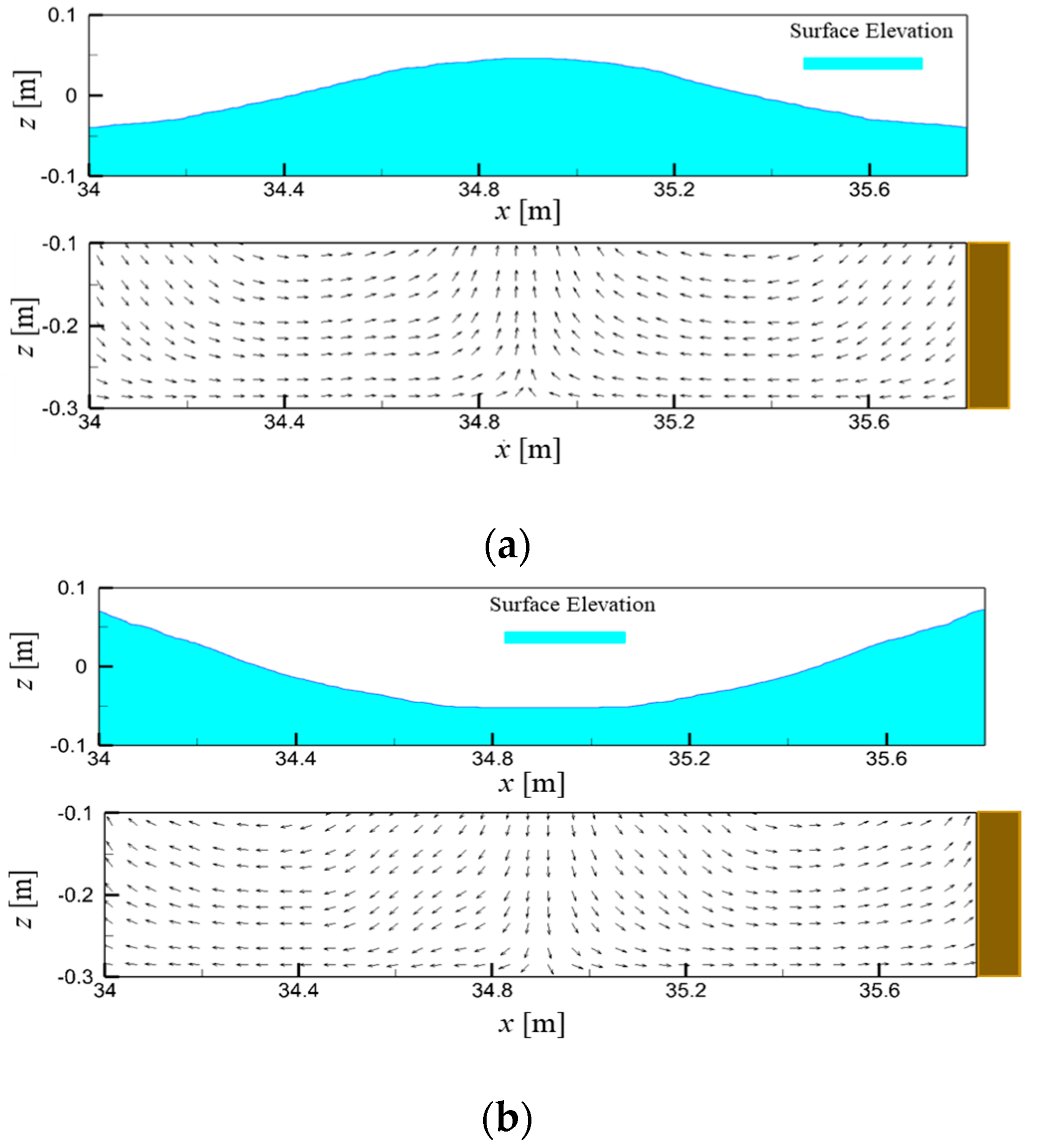
Hydrodynamic Results
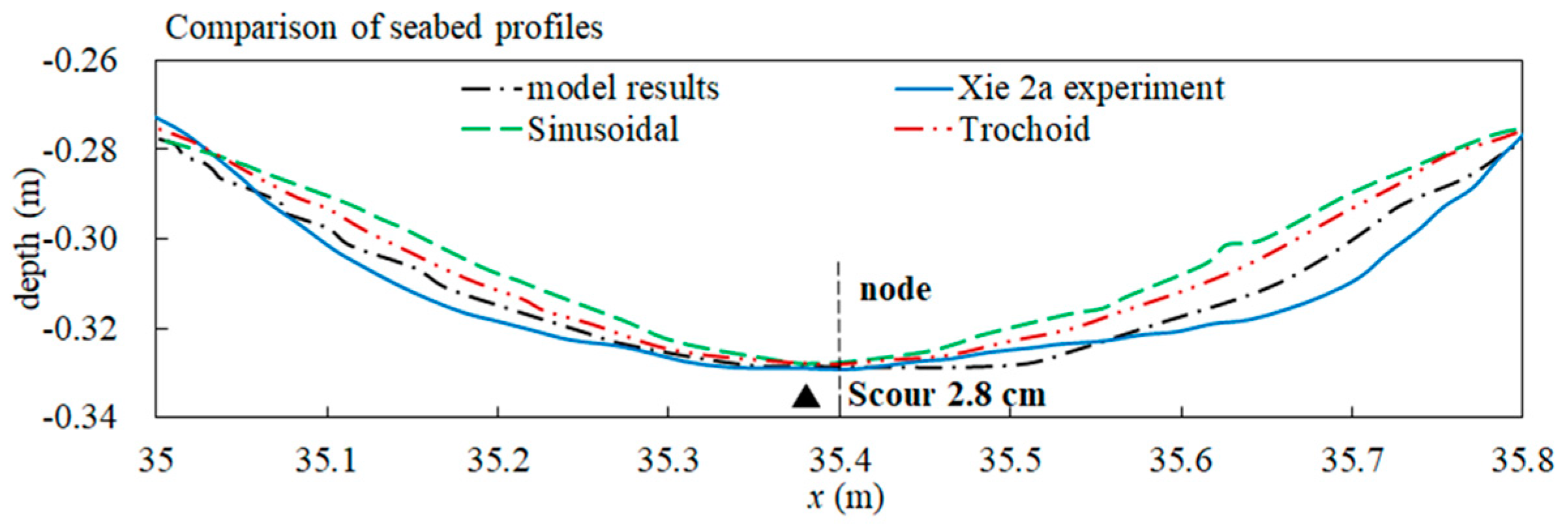
3.3. Seabed Profile Change Verification
3.3.1. Grid-Independence Analysis
3.3.2. Morpho-Dynamic Results
4. Model Application
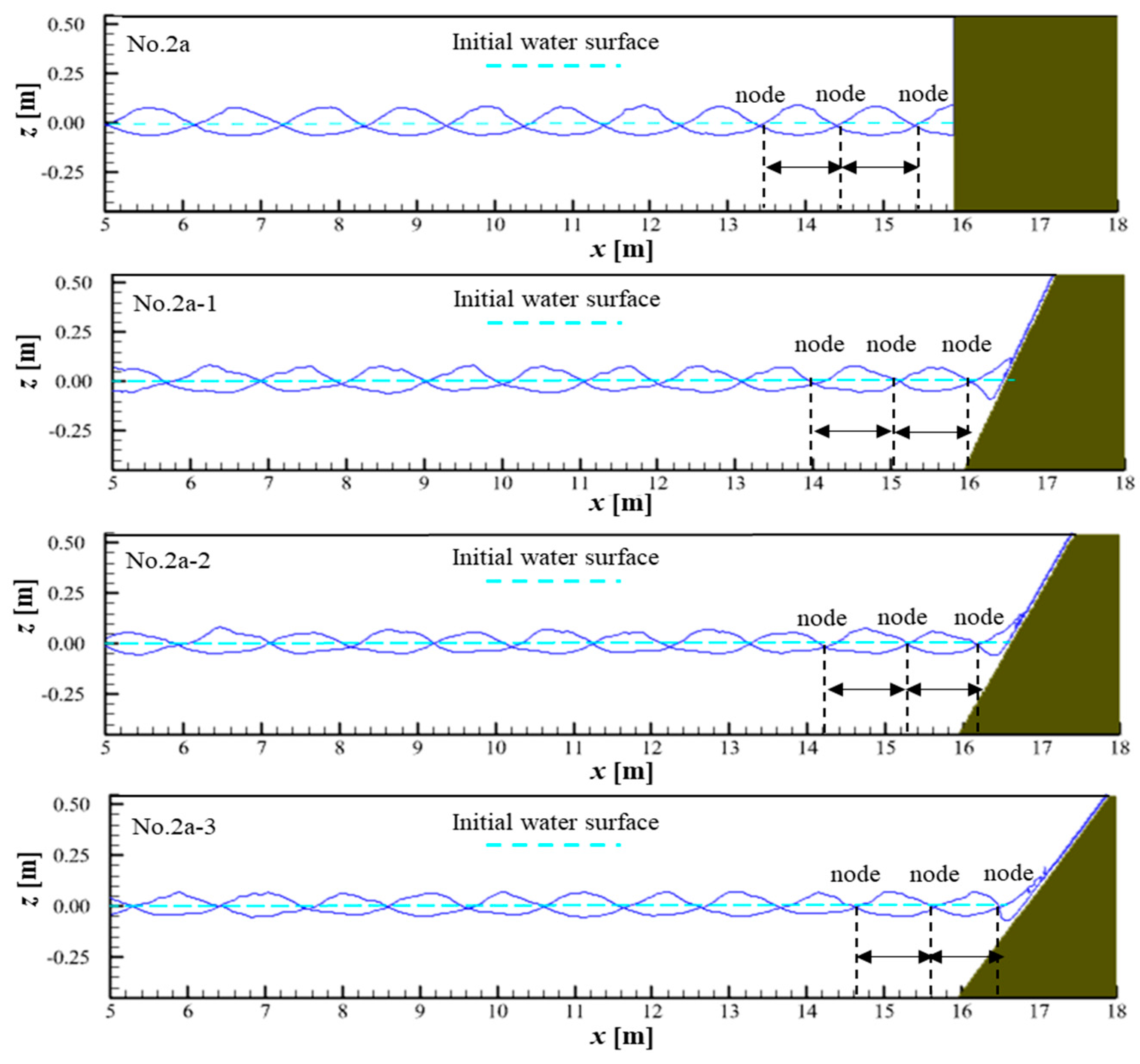
4.1. Wave Characteristics in Different Breakwater Steepness
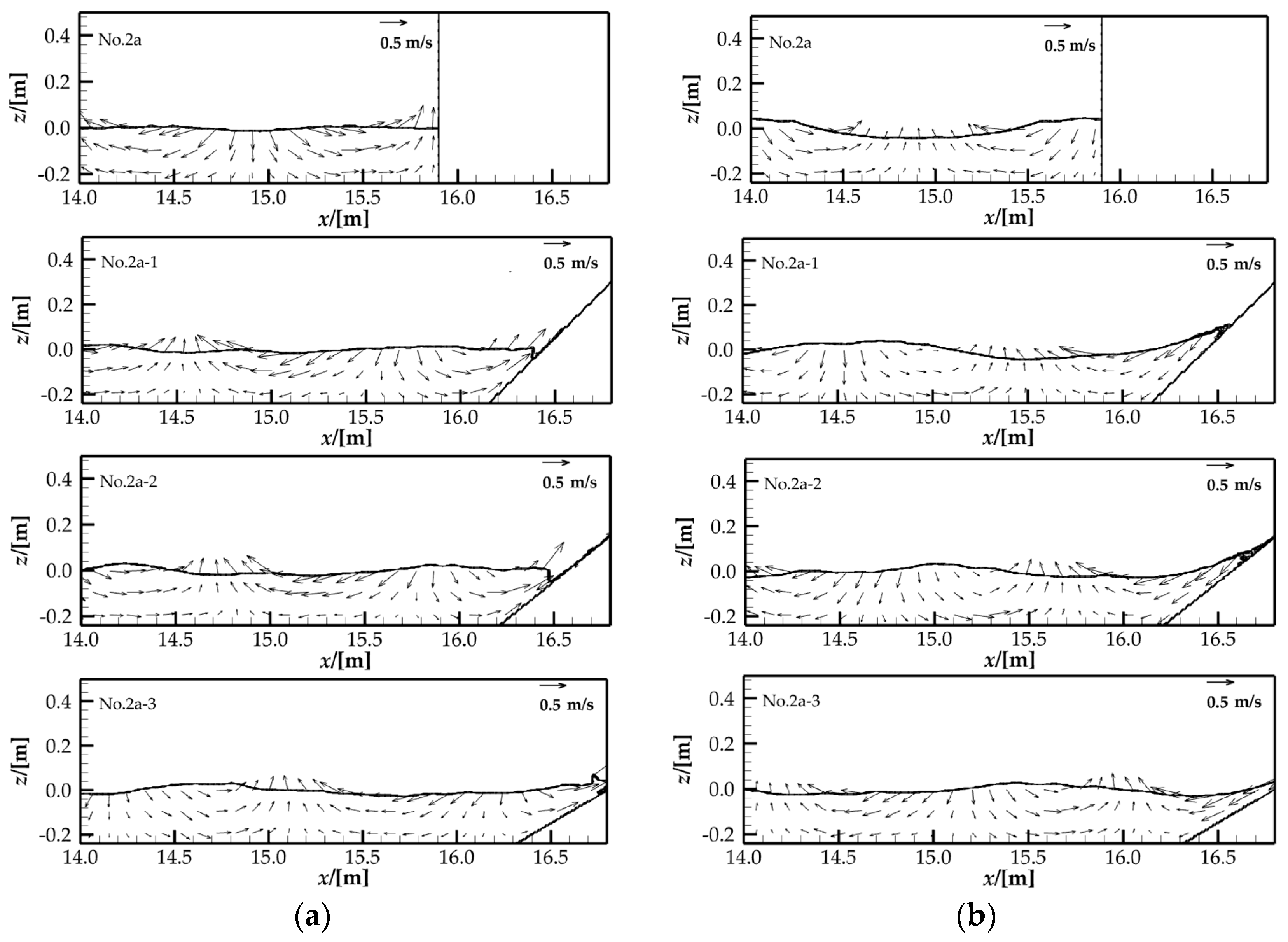
4.2. Sediment Movement Characteristics in Different Breakwater Steepness
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xie, S.L. Scouring Patterns in Front of Vertical Breakwaters and Their Influences on the Stability of the Foundations of the Breakwaters; Delft University of Technology: Delft, The Netherlands, 1981. [Google Scholar]
- Li, Z.; Jeng, D.S. Dynamic soil response around two-layered detached breakwaters: Three-dimensional OpenFOAM model. Ocean Eng. 2023, 268, 113582. [Google Scholar] [CrossRef]
- Sumer, B.; Fredsoe, J. The Mechanics of Scour in the Marine Environment; World Scientific: River Edge, NJ, USA, 2002. [Google Scholar]
- Hajivalie, F.; Yeganeh-Bakhtiary, A.; Houshanghi, H.; Gotoh, H. Euler–Lagrange model for scour in front of vertical breakwater. Appl. Ocean Res. 2012, 34, 96–106. [Google Scholar] [CrossRef]
- Yeganeh-Bakhtiary, A.; Houshangi, H.; Abolfathi, S. Lagrangian two-phase flow modeling of scour in front of vertical breakwater. Coast. Eng. J. 2020, 62, 252–266. [Google Scholar] [CrossRef]
- Chauchat, J.; Cheng, Z.; Nagel, T.; Bonamy, C.; Hsu, T.J. SedFoam-2.0: A 3-D two-phase flow numerical model for sediment transport. Geosci. Model Dev. 2017, 10, 4367–4392. [Google Scholar] [CrossRef]
- Li, J.; Chen, X. A multi-dimensional two-phase mixture model for intense sediment transport in sheet flow and around pipeline. Phys. Fluids 2022, 34, 103314. [Google Scholar] [CrossRef]
- Meyer-Peter, E.; Müller, R. Formulas for Bed-load Transport; IAHR: Madrid, Spain, 1948. [Google Scholar]
- Rouse, H. Modern conceptions of the mechanics of fluid turbulence. Trans. Am. Soc. Civil Eng. 1937, 102, 463–505. [Google Scholar] [CrossRef]
- Engelund, F.; Hansen, E. A Monograph on Sediment Transport in Alluvial Streams; Technical University of Denmark Oservoldgade 10: Copenhagen K.; Delft University of Technology: Delft, The Netherlands, 1967; Available online: http://resolver.tudelft.nl/uuid:81101b08-04b5-4082-9121-861949c336c9 (accessed on 18 November 2024).
- Hou, Y.; Nakamura, T.; Cho, Y.H.; Mizutani, N.; Tomita, T. Influence of tsunami-driven shipping containers’ layout on their motion. J. Mar. Sci. Eng. 2022, 10, 1911. [Google Scholar] [CrossRef]
- Nakamura, T.; Yim, S.C. Development of a 3D numerical model considering interactions between wave fields and topographical changes and its application to erosion and scouring phenomena. Proc. Civil Eng. Ocean JSCE 2009, 25, 1227–1232. [Google Scholar]
- Mizutani, N.; Maeda, K.; Ayman, M.; Mostafa, G.; McDougal, W. Evaluation of resistance coefficient of permeable structures and numerical analysis of nonlinear interaction between waves and submersible permeable structures. Proc. Coast. Eng. JSCE 1996, 43, 131–135. [Google Scholar] [CrossRef]
- Brackbill, J.U.; Kothe, B.D.; Zemach, C. A continuum method for modeling surface tension. J. Comp. Phys. 1992, 100, 335–354. [Google Scholar] [CrossRef]
- Kobayashi, H. The subgrid-scale models based on coherent structures for rotating homogeneous turbulence and turbulent channel flow. Phys. Fluids. 2005, 17, 045104. [Google Scholar] [CrossRef]
- Iwata, K.; Kawasaki, H.; Kin, D. Numerical analysis of wave breaking by underwater structures. J. Coast. Eng. 1995, 42, 781–785. [Google Scholar]
- Roulund, A.; Sumer, B.M.; Fredsøe, J.; Michelsen, J. Numerical and experimental investigation of flow and scour around a circular pile. J. Fluid Mech. 2005, 534, 351–401. [Google Scholar] [CrossRef]
- Engelund, F.; Fredsøe, J. A sediment transport model for straight alluvial channels. Hydrol. Res. 1976, 7, 293–306. [Google Scholar] [CrossRef]
- Iwagaki, Y. Hydraulic study of critical tractive force. Proc. Trans. Japan Soc. Civil Eng. 1956, 41, 1–21. [Google Scholar] [CrossRef]
- Nielsen, P.; Svendsen, I.A.; Staub, C. Onshore-offshore sediment movement on a beach. Proc. Int. Conf. Coast. Eng. ASCE 1978, 16, 1475–1492. [Google Scholar] [CrossRef]
- Nielsen, P. Coastal Bottom Boundary Layers and Sediment Transport; World Scientific: River Edge, NJ, USA, 1992. [Google Scholar]
- Allen, J.R.L. Principles of Physical Sedimentology; Allen and Unwin: Crows Nest, Australia, 1985; p. 272. [Google Scholar]
- Miyamoto, J.; Sasa, M.; Tokuyama, R.; Sekiguchi, H. Observation of gravity flow and solidification/sedimentation processes of underwater sediments. Proc. Coast. Eng. JSCE 2004, 51, 401–405. [Google Scholar] [CrossRef]
- Nakamura, T.; Cho, Y.; Mizutani, N. A consideration on the treatment of slope failures when calculating topographical changes due to sand drift. In Proceedings of the 71st Annual Conference Japanese Society Civil Engineering, Sendai, Japan, 7–9 September 2016; pp. 437–438. [Google Scholar]
- Karagiannis, N.; Karambas, T.; Koutitas, C. Numerical simulation of scour depth and scour patterns in front of vertical-wall breakwaters using OpenFOAM. J. Mar. Sci. Eng. 2020, 8, 836. [Google Scholar] [CrossRef]
- Daloui, A.; Jamali, M. Experimental Study of Scour Due to Breaking Waves in Front of Vertical-Wall Breakwaters. In Proceedings of the ASME 2004 23rd International Conference on Offshore Mechanics and Arctic Engineering, Vancouver, BC, Canada, 20–25 June 2004. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | H (cm) | T (s) | L (m) | H/L | |
|---|---|---|---|---|---|
| No. 2a | 7.5 | 1.32 | 2.0 | 0.0375 | 0.0044 |
| No. 6a | 9.0 | 1.86 | 3.0 | 0.0300 | 0.0052 |
| No. 25a | 9.0 | 2.41 | 4.0 | 0.0125 | 0.0008 |
| Case | H | d/L | Group | ||
|---|---|---|---|---|---|
| No. 2a | 106 μm | 0.7 cm/s | 7.5 cm | 0.15 | Fine |
| Test | Grid Resolution in z-Direction (m) | Grid Resolution in x-Direction (m) |
|---|---|---|
| Grid 1 | 0.0100 | 0.02 |
| Grid 2 | 0.0050 | 0.02 |
| Grid 3 | 0.0025 | 0.02 |
| Grid 4 | 0.0010 | 0.02 |
| Case | d (m) | H (m) | L (m) | T (s) | (μm) | Slope | Steepness |
|---|---|---|---|---|---|---|---|
| No. 2a | 0.3 | 0.075 | 2.0 | 1.32 | 106 | vertical | - |
| No. 2a-1 | 0.3 | 0.075 | 2.0 | 1.32 | 106 | 1:1.2 | steep |
| No. 2a-2 | 0.3 | 0.075 | 2.0 | 1.32 | 106 | 1:1.5 | steep |
| No. 2a-3 | 0.3 | 0.075 | 2.0 | 1.32 | 106 | 1:2.0 | gentle |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Nakamura, T.; Cho, Y.-H.; Mizutani, N. Numerical Simulation of Wave-Induced Scour in Front of Vertical and Inclined Breakwaters. J. Mar. Sci. Eng. 2024, 12, 2261. https://doi.org/10.3390/jmse12122261
Liu X, Nakamura T, Cho Y-H, Mizutani N. Numerical Simulation of Wave-Induced Scour in Front of Vertical and Inclined Breakwaters. Journal of Marine Science and Engineering. 2024; 12(12):2261. https://doi.org/10.3390/jmse12122261
Chicago/Turabian StyleLiu, Xin, Tomoaki Nakamura, Yong-Hwan Cho, and Norimi Mizutani. 2024. "Numerical Simulation of Wave-Induced Scour in Front of Vertical and Inclined Breakwaters" Journal of Marine Science and Engineering 12, no. 12: 2261. https://doi.org/10.3390/jmse12122261
APA StyleLiu, X., Nakamura, T., Cho, Y.-H., & Mizutani, N. (2024). Numerical Simulation of Wave-Induced Scour in Front of Vertical and Inclined Breakwaters. Journal of Marine Science and Engineering, 12(12), 2261. https://doi.org/10.3390/jmse12122261