

Theoretical and Computational Insights into a System of Time-Fractional Nonlinear Schrödinger Delay Equations



Abstract
1. Introduction
2. Long-Time Stability of the Analytical Solution
3. Asymptotic Analysis for Spatial Semi-Discrete Numerical Solutions
4. Temporal Discretization and Long-Time Stability
5. Numerical Results and Simulations
- (i)
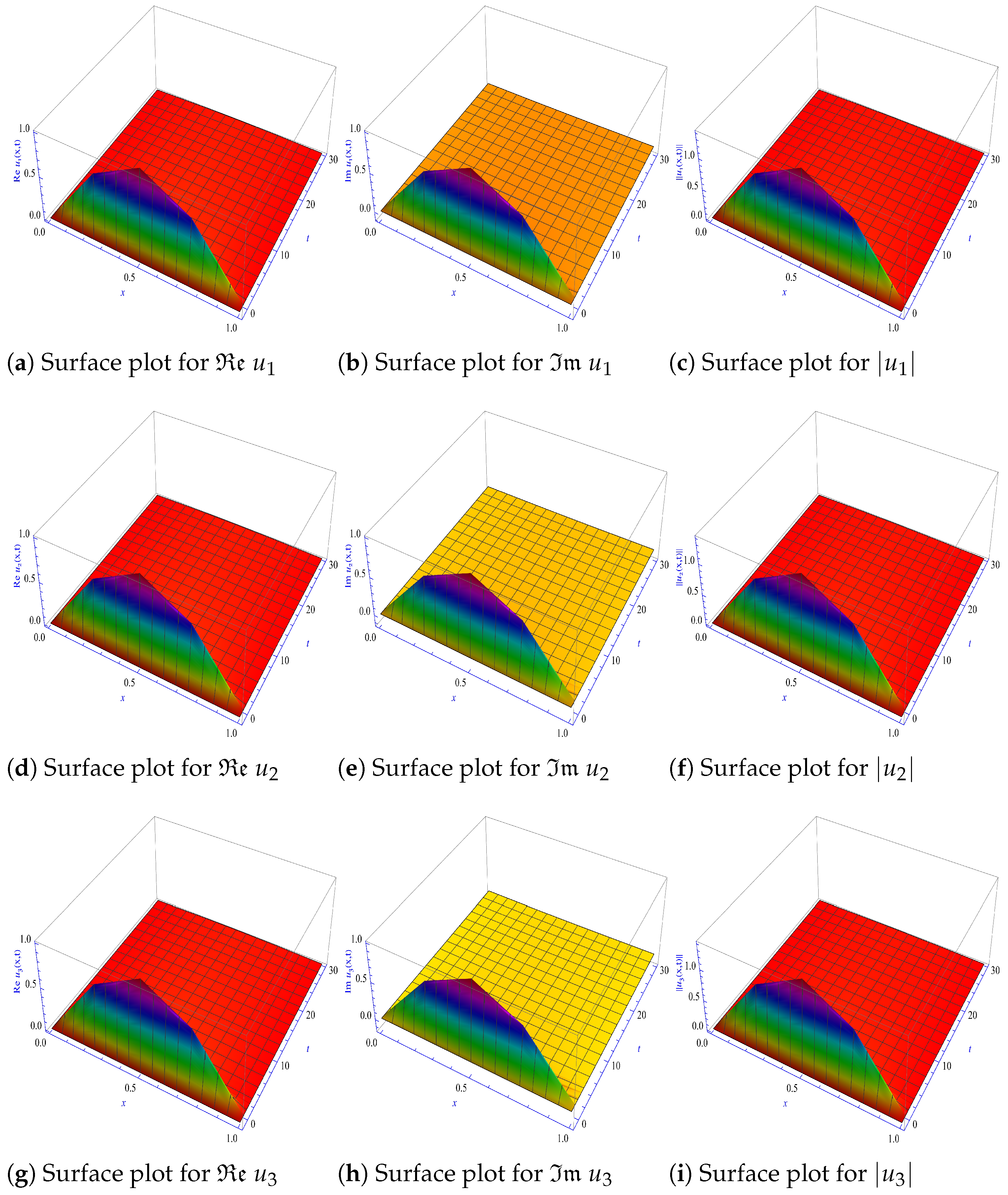
- For () and (); in this case, Figure 1 shows that the solutions are asymptotically stable and indicates that the findings are consistent theoretically with Theorem 1 and numerically with Theorems 2 and 3.
- (ii)
- (i)
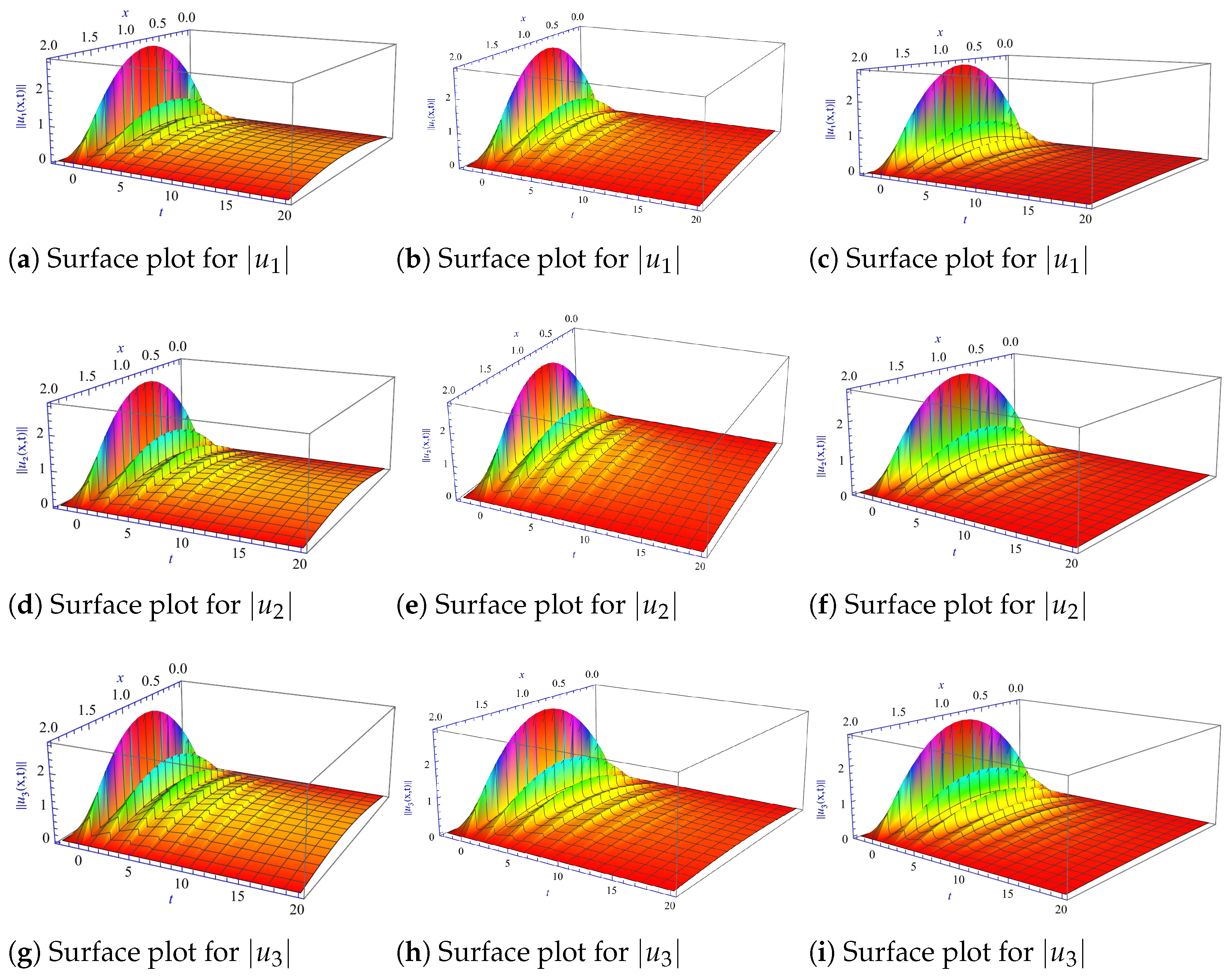
- () and (). In Figure 4, many patterns show that the solutions are asymptotically stable and have the same layout for all values of α and investigate that the results are in accordance theoretically with Theorem 1 and numerically with Theorems 2 and 3.
- (ii)
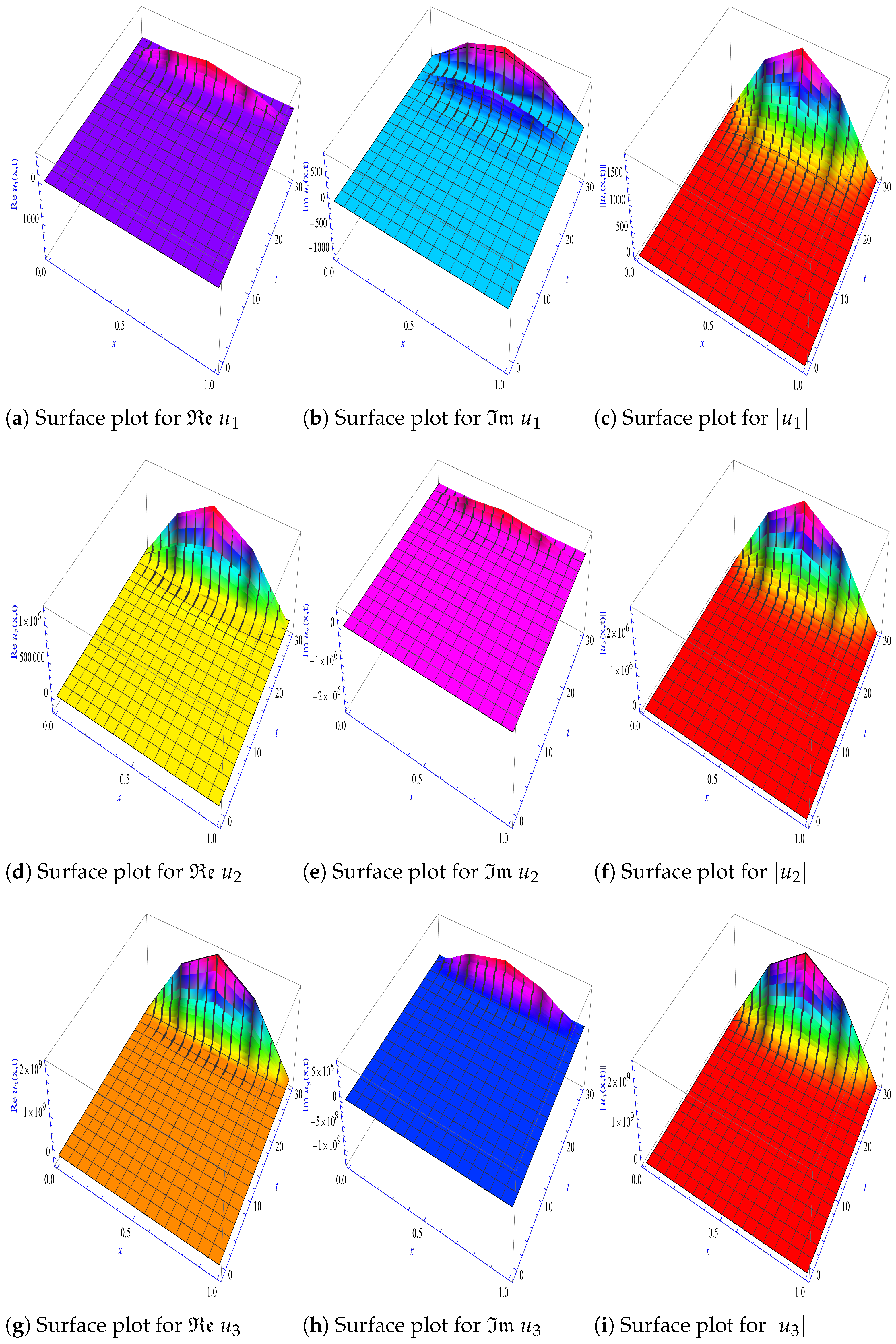
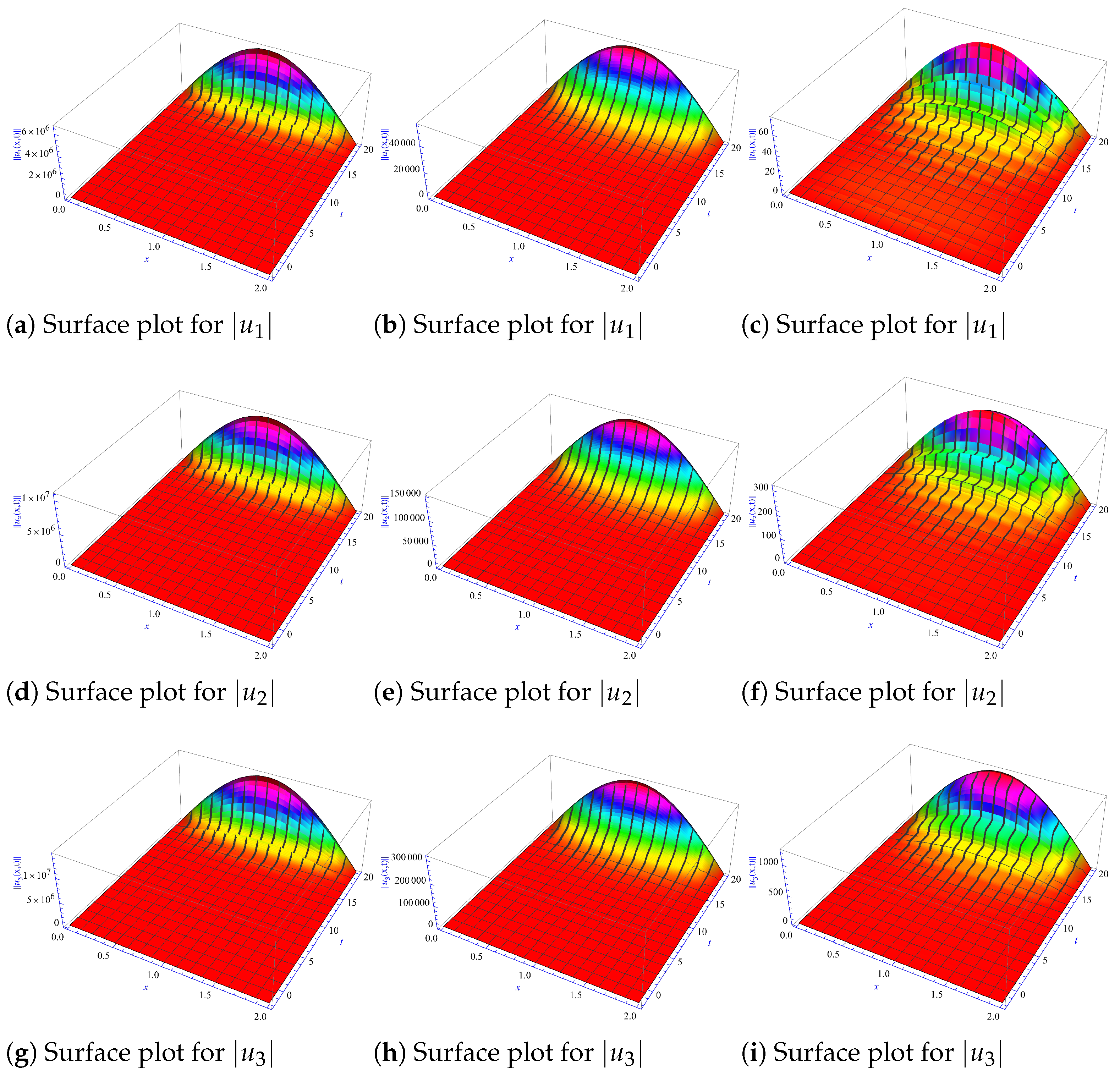
- () and (). The results, as shown in Figure 5, demonstrate that the solutions are unstable and also display consistent behavior for all values of α, but it seems that decreasing α makes the solution unstable energetically. These findings investigate that the fractional order α has a significant impact on the qualitative nature of the unstable solutions.
- 1.
- In Example 1, we illustrate the behavior of the numerical solutions under two scenarios: (i) When hypothesis H1 is satisfied, the solutions demonstrate asymptotic stability, aligning with the theoretical predictions.(ii) When hypothesis H1 is not satisfied, we analyze the solution behavior in two distinct cases: without delay and with delay. The results reveal that the presence of delay significantly influences the long-time stability of the solutions. These findings are in complete agreement with the theoretical results established in Theorem 1 and are further validated numerically through Theorems 2 and 3. The strong correspondence between the theoretical and numerical results investigates the critical role of delay in studying the stability properties of the system.
- 2.
- These findings highlight the significant influence of the fractional order α on the qualitative behavior of the solutions. Specifically, when the solutions exhibit instability, it is evident that decreasing α leads to an energetically unstable solution, as clearly illustrated in the patterns shown in Figure 5.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Berezin, F.A.; Shubin, M. The Schrödinger Equation; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 66. [Google Scholar]
- Fibich, G. The Nonlinear Schrödinger Equation; Springer: Berlin/Heidelberg, Germany, 2015; Volume 192. [Google Scholar]
- Khan, N.A.; Hameed, T. An implementation of Haar wavelet based method for numerical treatment of time-fractional Schrödinger and coupled Schrödinger systems. IEEE/CAA J. Autom. Sin. 2016, 6, 177–187. [Google Scholar] [CrossRef]
- Okposo, N.I.; Veeresha, P.; Okposo, E.N. Solutions for time-fractional coupled nonlinear Schrödinger equations arising in optical solitons. Chin. J. Phys. 2022, 77, 965–984. [Google Scholar] [CrossRef]
- Ali, K.K.; Maneea, M. Optical solitons using optimal homotopy analysis method for time-fractional (1+1)-dimensional coupled nonlinear Schrödinger equations. Optik 2023, 283, 170907. [Google Scholar] [CrossRef]
- Ameen, I.G.; Taie, R.O.A.; Ali, H.M. Two effective methods for solving nonlinear coupled time-fractional Schrödinger equations. Alex. Eng. J. 2023, 70, 331–347. [Google Scholar] [CrossRef]
- Zaky, M.A.; Hendy, A.S.; Aldraiweesh, A.A. Numerical algorithm for the coupled system of nonlinear variable-order time fractional Schrödinger equations. Rom. Rep. Phys. 2023, 75, 106. [Google Scholar]
- Hadhoud, A.R.; Agarwal, P.; Rageh, A.A.M. Numerical treatments of the nonlinear coupled time-fractional Schrödinger equations. Math. Methods Appl. Sci. 2022, 45, 7119–7143. [Google Scholar] [CrossRef]
- Onder, I.; Secer, A.; Bayram, M. Optical soliton solutions of time-fractional coupled nonlinear Schrödinger system via Kudryashov-based methods. Optik 2023, 272, 170362. [Google Scholar] [CrossRef]
- Mubashir Hayat, A.; Abbas, M.; Emadifar, H.; Alzaidi, A.S.M.; Nazir, T.; Aini, A.F. An efficient computational scheme for solving coupled time-fractional Schrödinger equation via cubic B-spline functions. PLoS ONE 2024, 19, e0296909. [Google Scholar] [CrossRef] [PubMed]
- Ahmad, J.; Rani, S.; Turki, N.B.; Shah, N.A. Novel resonant multi-soliton solutions of time fractional coupled nonlinear Schrödinger equation in optical fiber via an analytical method. Results Phys. 2023, 52, 106761. [Google Scholar] [CrossRef]
- Wang, Y.; Mei, L. A conservative spectral Galerkin method for the coupled nonlinear space-fractional Schrödinger equations. Int. J. Comput. Math. 2019, 96, 2387–2410. [Google Scholar] [CrossRef]
- Almushaira, M.; Liu, F. Fourth-order time-stepping compact finite difference method for multi-dimensional space-fractional coupled nonlinear Schrödinger equations. SN Partial. Differ. Equ. Appl. 2020, 1, 45. [Google Scholar] [CrossRef]
- Zhao, X.; Yang, Y.; Li, H.; Fang, Z.; Liu, Y. Numerical analysis and computation of the finite volume element method for the nonlinear coupled time-fractional Schrödinger equations. Fractal Fract. 2024, 8, 480. [Google Scholar] [CrossRef]
- Chen, Y.; Guo, J. Unconditional error analysis of the linearized transformed L1 virtual element method for nonlinear coupled time-fractional Schrödinger equation. J. Comput. Appl. Math. 2025, 457, 116283. [Google Scholar] [CrossRef]
- Fridman, E. Introduction to Time-Delay Systems: Analysis and Control; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Gao, Y.; Kostyukova, O.; Chong, K.T. Worst-case optimal control for an electrical drive system with time-delay. Asian J. Control 2009, 11, 386–395. [Google Scholar] [CrossRef]
- Shao, C.; Sheng, J. The framework for linear periodic time-delay systems based on semi-discretization: Stability analysis and control. Asian J. Control 2014, 16, 1350–1360. [Google Scholar] [CrossRef]
- Gumowski, I.; Mira, C.; Pearson, A.E. Optimization in Control Theory and Practice. J. Appl. Mech. Jun 1969, 36, 383. [Google Scholar] [CrossRef]
- Yang, K.Y.; Wang, J.M. Pointwise stabilisation of a string with time delay in the observation. Int. J. Control 2017, 90, 2394–2405. [Google Scholar] [CrossRef]
- Datko, R.; Lagnese, J.; Polis, M. An example on the effect of time delays in boundary feedback stabilization of wave equations. SIAM J. Control Optim. 1986, 24, 152–156. [Google Scholar] [CrossRef]
- Datko, R. Two examples of ill-posedness with respect to time delays revisited. IEEE Trans. Autom. Control 1997, 42, 511–515. [Google Scholar] [CrossRef]
- Tang, S.; Xie, C. State and output feedback boundary control for a coupled PDE–ODE system. Syst. Control Lett. 2011, 60, 540–545. [Google Scholar] [CrossRef]
- Wang, J.M.; Guo, B.Z.; Krstic, M. Wave equation stabilization by delays equal to even multiples of the wave propagation time. SIAM J. Control Optim. 2011, 49, 517–554. [Google Scholar] [CrossRef]
- Guo, B.Z.; Xu, C.Z.; Hammouri, H. Output feedback stabilization of a one–dimensional wave equation with an arbitrary time delay in boundary observation. ESAIM Control. Optim. Calc. Var. 2012, 18, 22–35. [Google Scholar] [CrossRef]
- Čermák, J.; Došlá, Z.; Kisela, T. Fractional differential equations with a constant delay: Stability and asymptotics of solutions. Appl. Math. Comput. 2017, 298, 336–350. [Google Scholar] [CrossRef]
- Wang, H.; Yu, Y.; Wen, G.; Zhang, S.; Yu, J. Global stability analysis of fractional-order Hopfield neural networks with time delay. Neurocomputing 2015, 154, 15–23. [Google Scholar] [CrossRef]
- Xu, Y.; Li, Y.; Li, W. Graph-theoretic approach to synchronization of fractional-order coupled systems with time-varying delays via periodically intermittent control. Chaos Solitons Fractals 2019, 121, 108–118. [Google Scholar] [CrossRef]
- Čermák, J.; Nechvátal, L. On exact and discretized stability of a linear fractional delay differential equation. Appl. Math. Lett. 2020, 105, 106296. [Google Scholar] [CrossRef]
- Li, D.; Zhang, C. Long time numerical behaviors of fractional pantograph equations. Math. Comput. Simul. 2020, 172, 244–257. [Google Scholar] [CrossRef]
- Wang, D.; Xiao, A.; Liu, H. Dissipativity and stability analysis for fractional functional differential equations. Fract. Calc. Appl. Anal. 2015, 18, 1399–1422. [Google Scholar] [CrossRef]
- Wang, D.; Zou, J. Dissipativity and contractivity analysis for fractional functional differential equations and their numerical approximations. SIAM J. Numer. Anal. 2019, 57, 1445–1470. [Google Scholar] [CrossRef]
- Wang, D.; Xiao, A.; Sun, S. Asymptotic behavior of solutions to time fractional neutral functional differential equations. J. Comput. Appl. Math. 2021, 382, 113086. [Google Scholar] [CrossRef]
- Nicaise, S.; Rebiai, S.E. Stabilization of the Schrödinger equation with a delay term in boundary feedback or internal feedback. Port. Math. 2011, 68, 19–39. [Google Scholar] [CrossRef] [PubMed]
- Agirseven, D. On the stability of the Schrödinger equation with time delay. Filomat 2018, 32, 759–766. [Google Scholar] [CrossRef]
- Yao, Z.; Yang, Z. Numerical stability analysis of spatial-temporal fully discrete scheme for time-fractional delay Schrödinger equations. Numer. Algorithms 2024, 97, 1237–1265. [Google Scholar] [CrossRef]
- Zhao, Z.; Ge, W. Traveling wave solutions for Schrödinger equation with distributed delay. Appl. Math. Model. 2011, 35, 675–687. [Google Scholar] [CrossRef]
- Yao, Z.; Yang, Z.; Cheng, L. On the stability preserving of L1 scheme to nonlinear time-fractional Schrödinger delay equations. Math. Comput. Simul. 2025, 231, 209–220. [Google Scholar] [CrossRef]
- Nady, A.; Mathkoor, F.H.; Harun, S.W. Theoretical study on passively mode-locked fiber lasers with saturable absorber. Fiber Integr. Opt. 2019, 38, 76–89. [Google Scholar] [CrossRef]
- Wadati, M.; Iizuka, T.; Hisakado, M. A coupled nonlinear Schrödinger equation and optical solitons. J. Phys. Soc. Jpn. 1992, 61, 2241–2245. [Google Scholar] [CrossRef]
- Rahby, A.S.; Yang, Z. Asymptotic analysis for time fractional FitzHugh-Nagumo equations. J. Appl. Math. Comput. 2025, 71, 3509–3532. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Alikhanov, A. A Priori Estimates for Solutions of Boundary Value Problems for Fractional-Order Equations. Differ. Equ. 2010, 46, 660–666. [Google Scholar] [CrossRef]
- He, B.B.; Zhou, H.C.; Kou, C.H.; Chen, Y. New integral inequalities and asymptotic stability of fractional-order systems with unbounded time delay. Nonlinear Dyn. 2018, 94, 1523–1534. [Google Scholar] [CrossRef]
- Duo, S.; Ju, L.; Zhang, Y. A fast algorithm for solving the space-time fractional diffusion equation. Comput. Math. Appl. 2018, 75, 1929–1941. [Google Scholar] [CrossRef]
- Aksoy, N.Y. On the Convergence of Finite Difference Scheme for a Schrödinger Type Equation. New Trends Math. Sci. 2022, 10, 32–46. [Google Scholar]
- Wang, S.; Nissen, A.; Kreiss, G. Convergence of Finite Difference Methods for the Wave Equation in Two Space Dimensions. Math. Comput. 2018, 87, 2737–2763. [Google Scholar] [CrossRef]
- Applelby, J.A.D.; Győri, I.; Reynolds, D.W. On exact convergence rates for solutions of linear systems of Volterra difference equations. J. Differ. Equ. Appl. 2006, 12, 1257–1275. [Google Scholar] [CrossRef]
- Sun, Z.; Wu, X. A Fully Discrete Difference Scheme for a Diffusion-Wave System. Appl. Numer. Math. 2006, 56, 193–209. [Google Scholar] [CrossRef]
- Lin, Y.; Xu, C. Finite Difference/Spectral Approximations for the Time-Fractional Diffusion Equation. J. Comput. Phys. 2007, 225, 1533–1552. [Google Scholar] [CrossRef]
- Jin, B.; Lazarov, R.; Zhou, Z. An Analysis of the L1 Scheme for the Subdiffusion Equation with Nonsmooth Data. IMA J. Numer. Anal. 2016, 36, 197–221. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.2 | 0.6 | |||||
|---|---|---|---|---|---|---|
| Order | CPU Time | Order | CPU Time | |||
| − | − | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elhamaky, M.N.; Abd Elgawad, M.A.; Yang, Z.; Rahby, A.S. Theoretical and Computational Insights into a System of Time-Fractional Nonlinear Schrödinger Delay Equations. Axioms 2025, 14, 432. https://doi.org/10.3390/axioms14060432
Elhamaky MN, Abd Elgawad MA, Yang Z, Rahby AS. Theoretical and Computational Insights into a System of Time-Fractional Nonlinear Schrödinger Delay Equations. Axioms. 2025; 14(6):432. https://doi.org/10.3390/axioms14060432
Chicago/Turabian StyleElhamaky, Mai N., Mohamed A. Abd Elgawad, Zhanwen Yang, and Ahmed S. Rahby. 2025. "Theoretical and Computational Insights into a System of Time-Fractional Nonlinear Schrödinger Delay Equations" Axioms 14, no. 6: 432. https://doi.org/10.3390/axioms14060432
APA StyleElhamaky, M. N., Abd Elgawad, M. A., Yang, Z., & Rahby, A. S. (2025). Theoretical and Computational Insights into a System of Time-Fractional Nonlinear Schrödinger Delay Equations. Axioms, 14(6), 432. https://doi.org/10.3390/axioms14060432