Application of Beamforming Technology in Ionospheric Oblique Backscatter Sounding with a Miniaturized L-Array


Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
- The system realized miniaturization design and is dedicated to ionospheric oblique backscatter sounding, which can provide real-time ionospheric state information.
- The system adopted two-dimensional directional receiving, which is more flexible and easier to adjust. Compared with the beamforming method of the transmitter, it has better anti-jamming ability at the receiver.
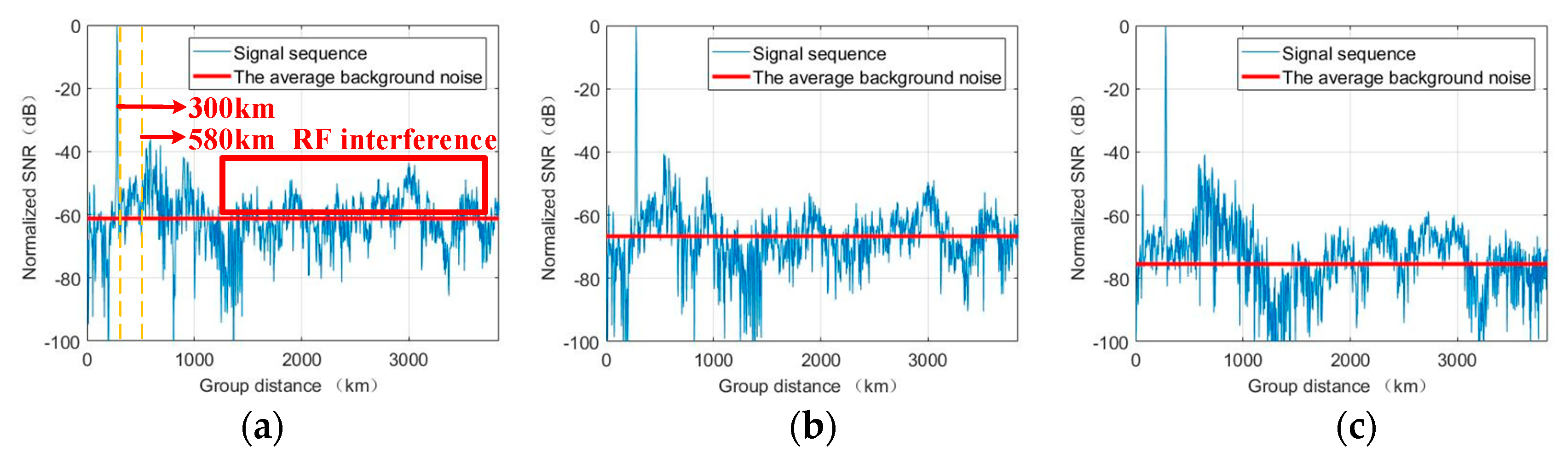
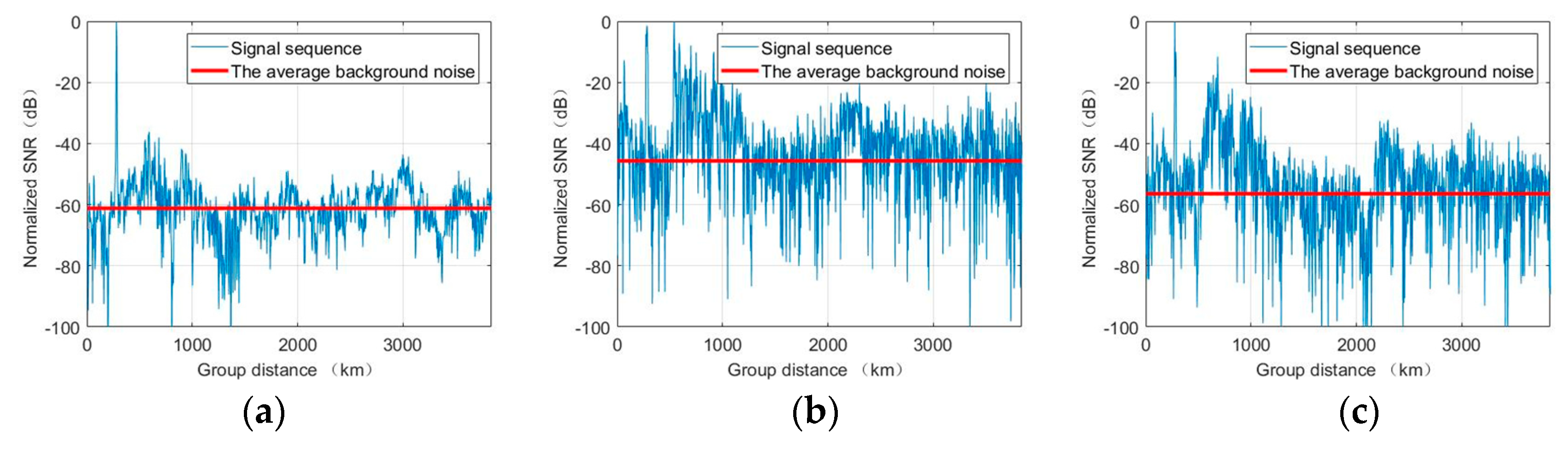
- The 2-D adaptive beamformer effectively suppressed the vertical echoes and other RF interferences.
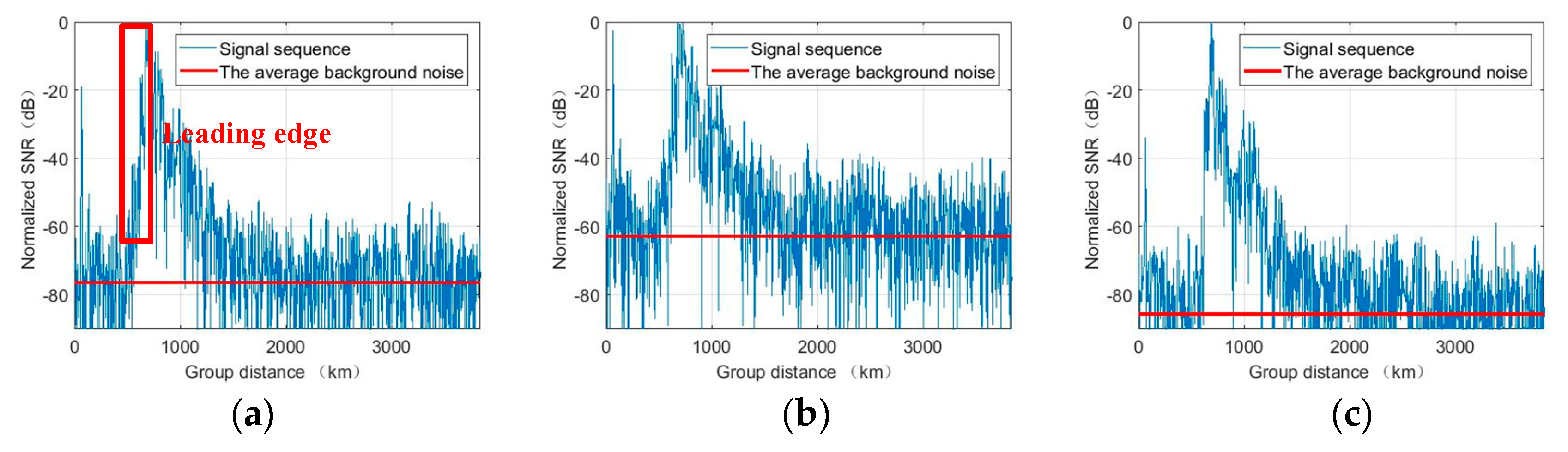
- After adaptive beamforming processing, the leading edge of the oblique backscatter ionogram is clearer and steeper. It is of great significance for the trace extraction, which may further affect the inversion accuracy and improve the effective observation range.
2. System Description
2.1. Transmitting Subsystem
2.2. Multi-Channel Receiver
2.3. Antenna Array
3. Beamforming of the Miniaturized L-Array
3.1. Basic Beamforming Performance of L-Array
3.2. The Weight Vector of Beamforming
3.3. Adaptive Beamforming
3.3.1. The Sampling Matrix Inversion Beamformer
3.3.2. Eigenspace-Based Beamformer
4. Beamforming of the Oblique Backscatter Ionogram
5. Experiments and Results
5.1. Basic Function Verification
5.2. Conventional Beamforming of Oblique Backscatter Ionogram
5.3. Adaptive Beamforming of Oblique Backscatter Ionogram
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Croft, T.A. Sky-wave backscatter: A means for observing our environment at great distances. Rev. Geophys. 1972, 10, 73–155. [Google Scholar] [CrossRef]
- Raab, F.H.; Caverly, R.; Campbell, R.; Eron, M.; Hecht, J.B.; Mediano, A.; Myer, D.P.; Walker, J.L.B. HF, VHF, and UHF systems and technology. IEEE Trans. Microw. Theory Tech. 2002, 50, 888–899. [Google Scholar] [CrossRef]
- Headrick, J.M.; Thomason, J.F. Applications of high frequency radar. Radio Sci. 1998, 33, 1045–1054. [Google Scholar] [CrossRef]
- Settimi, A.; Pezzopane, M.; Pietrella, M.; Bianchi, C.; Scotto, C.; Zuccheretti, E. Testing the IONORT-ISP system: A comparison between synthesized and measured oblique ionograms. Radio Sci. 2013, 48, 167–179. [Google Scholar] [CrossRef]
- Goodman, J.; Ballard, J.; Sharp, E. A long-term investigation of the HF communication channel over middleand high-latitude paths. Radio Sci. 1997, 32, 1705–1715. [Google Scholar] [CrossRef]
- Earl, G.F.; Ward, B.D. The frequency management system of the Jindalee over-the-horizon backscatter HF radar. Radio Sci. 1987, 22, 275–291. [Google Scholar] [CrossRef]
- Occhipinti, G.; Dorey, P.; Farges, T.; Lognonne, P. Nostradamus: The radar that wanted to be a seismometer. Geophys. Res. Lett. 2010, 37, 1480–1493. [Google Scholar] [CrossRef]
- Lester, M.; Chapman, P.J.; Cowley, S.W.H.; Crooks, S.J.; Davies, J.A.; Hamadyk, P.; McWilliams, K.A.; Milan, S.E.; Parsons, M.J.; Payne, D.B.; et al. Stereo CUTLASS—A new capability for the SuperDARN HF radars. Ann. Geophys. 2004, 22, 459–473. [Google Scholar] [CrossRef]
- Barry, G.H. A low-power vertical-incidence ionosonde. IEEE Trans. Geosci. Electron. 2007, 9, 86–89. [Google Scholar] [CrossRef]
- Arthur, P.C.; Cannon, P.S. ROSE: A high performance oblique ionosonde providing new opportunities for ionospheric research. Ann. Geophys. 1994, 37, 135–144. [Google Scholar]
- Bazin, V.; Molinie, J.P.; Munoz, J.; Dorey, P.; Saillant, S.; Auffray, G.; Rannou, V.; Lesturgie, M. Nostradamus: An OTH Radar. IEEE Aerosp. Electron. Syst. Mag. 2007, 21, 3–11. [Google Scholar] [CrossRef]
- Cameron, A. The Jindalee operational radar network: Its architecture and surveillance capability. In Proceedings International Radar Conference; IEEE: Perth, Australia, 1995. [Google Scholar]
- Anderson, S.J. Adaptive remote sensing with HF skywave radar. IEE Proc. F-Radar Signal Process. 1992, 139, 182–192. [Google Scholar] [CrossRef]
- Greenwald, R.A.; Baker, K.B.; Dudeney, J.R.; Pinnock, M.; Jones, T.B.; Thomas, E.C.; Villain, J.-P.; Cerisier, J.-C.; Senior, C.; Hanuise, C.; et al. DARN/SuperDARN. Space Sci. Rev. 1995, 71, 761–796. [Google Scholar] [CrossRef]
- Liu, J.H.; Zhao, Z.Y.; Chen, X.T.; Yao, Y.G. The real-time DSP system design of the ionospheric oblique backscattersounding system. J. Wuhan Univ. Nat. Sci. Ed. 2003, 49, 132–136. [Google Scholar]
- Shi, S.; Yang, G.; Jiang, C.; Zhang, Y.; Zhao, Z. Wuhan Ionospheric Oblique BackscatterSounding System and Its Applications—A Review. Sensors 2017, 17, 1430. [Google Scholar] [CrossRef]
- Cui, X.; Chen, G.; Wang, J.; Song, H.; Gong, W. Design and Application of Wuhan Ionospheric Oblique BackscatterSounding System with the Addition of an Antenna Array (WIOBSS-AA). Sensors 2016, 16, 887. [Google Scholar] [CrossRef]
- Chen, G.; Zhao, Z.; Li, S.; Shi, S. WIOBSS: The Chinese low-power digital ionosonde for ionospheric backscatterdetection. Adv. Space Res. 2009, 43, 1343–1348. [Google Scholar] [CrossRef]
- Fabrizio, G.; Heitmann, A. Single site geolocation method for a linear array. In Proceedings of the 2012 IEEE Radar Conference; Institute of Electrical and Electronics Engineers (IEEE): San Diego, CA, USA, 2012; pp. 885–890. [Google Scholar]
- Holm, S.; Kristoffersen, K. Analysis of Worst-Case Phase Quantization Sidelobes in Focused Beamforming. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1992, 39, 593–599. [Google Scholar] [CrossRef]
- Hacker, P.; Schrank, H.E. Range distance requirements for measuring low and ultralow sidelobe antenna patterns. IEEE Trans. Antennas Propag. 1982, 30, 956–966. [Google Scholar] [CrossRef]
- Reed, I.S.; Mallett, J.D.; Brennan, L.E. Rapid Convergence Rate in Adaptive Arrays. IEEE Trans. Aerosp. Electron. Syst. 2007, AES-10, 853–863. [Google Scholar] [CrossRef]
- Robert, G.L.; Stephen, P.B. Robust minimum variance beamforming. IEEE Trans. Signal Process. 2005, 53, 1684–1696. [Google Scholar]
- Lee, C.-C.; Lee, J.-H. Eigenspace-based adaptive array beamforming with robust capabilities. IEEE Trans. Antennas Propag. 1998, 45, 1711–1716. [Google Scholar]
- Parker, D.; Zimmermann, D.C. Phased Arrays-Part 1: Theory and Architectures. IEEE Trans. Microw. Theory Tech. 2002, 50, 678–687. [Google Scholar] [CrossRef]
- Liao, G.; Zhang, B.; Zhang, L. A New Eigenstructure-Based Algorithm for Adaptive Beamforming. ACTA Electron. Sin. 1998, 26, 22–26. [Google Scholar]
- Capon, J. High resolution frequency-wavenumber spectrum analysis. Proc. IEEE 1969, 57, 1408–1418. [Google Scholar] [CrossRef]
- Liu, J.; Liu, W.; Liu, H.; Chen, B.; Xia, X.G.; Dai, F. Average SINR Calculation of a Persymmetric Sample Matrix Inversion Beamformer. IEEE Trans. Signal Process. 2016, 64, 2135–2145. [Google Scholar] [CrossRef]
- Song, H.; Hu, Y.; Jiang, C.; Zhou, C.; Zhao, Z. Automatic scaling of HF swept-frequency backscatter ionograms. Radio Sci. 2015, 50, 381–392. [Google Scholar] [CrossRef]
- Dzielski, J.E.; Burkhardt, R.C.; Kotanchek, M.E. Modified MUSIC algorithm for estimating DOA of signals—Comment. Signal Process. 1996, 55, 253–254. [Google Scholar] [CrossRef]
- Yu, J.L.; Yeh, C.C. Generalized eigenspace-based beamformers. IEEE Trans. Signal Process. 1995, 43, 2453–2461. [Google Scholar]




















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, T.; Yang, G.; Zhao, Z.; Jiang, C.; Hu, Y. Application of Beamforming Technology in Ionospheric Oblique Backscatter Sounding with a Miniaturized L-Array. Remote Sens. 2020, 12, 499. https://doi.org/10.3390/rs12030499
Liu T, Yang G, Zhao Z, Jiang C, Hu Y. Application of Beamforming Technology in Ionospheric Oblique Backscatter Sounding with a Miniaturized L-Array. Remote Sensing. 2020; 12(3):499. https://doi.org/10.3390/rs12030499
Chicago/Turabian StyleLiu, Tongxin, Guobin Yang, Zhengyu Zhao, Chunhua Jiang, and Yaogai Hu. 2020. "Application of Beamforming Technology in Ionospheric Oblique Backscatter Sounding with a Miniaturized L-Array" Remote Sensing 12, no. 3: 499. https://doi.org/10.3390/rs12030499
APA StyleLiu, T., Yang, G., Zhao, Z., Jiang, C., & Hu, Y. (2020). Application of Beamforming Technology in Ionospheric Oblique Backscatter Sounding with a Miniaturized L-Array. Remote Sensing, 12(3), 499. https://doi.org/10.3390/rs12030499