1. Introduction
Urban traffic congestion remains one of the most persistent challenges faced by modern cities, with significant consequences for mobility, environmental sustainability, public health, and economic productivity. Congested road networks increase travel times, fuel consumption, pollutant emissions, and driver stress, while reducing overall system efficiency. Numerous studies confirm that average trip durations rise sharply during peak periods, with metropolitan areas spending substantial portions of the day in recurring congestion [
1].
Concurrently, advances in the Internet of Things (IoT), connected vehicles, urban sensing infrastructures, and mobile communication networks have enabled continuous acquisition of large-scale mobility data and more responsive management of transportation systems. Within this technological landscape, the Digital Twin (DT) paradigm has gained traction as a means of coupling physical systems with high-fidelity digital replicas capable of reflecting real-time states, evaluating alternative scenarios, and recommending optimized system configurations. In this manuscript, DT refers to a continuously synchronized virtual replica of a physical traffic system, capable of ingesting real-time data, executing simulations, and producing predictions or recommendations that reflect or anticipate the state of the real system.
Recent work demonstrates the applicability of DTs in assessing transportation performance and mitigating congestion in intelligent transportation systems (ITS) [
2,
3], including in environments characterized by data loss, uncertainty, or variable communication latency [
4].
In parallel, mobile navigation applications such as Waze, Google Maps, and HERE WeGo have become deeply embedded in everyday mobility behavior. These platforms already influence large-scale traffic flows through dynamic route guidance and travel time estimation, and in some cases even collaborate with local authorities on adaptive road closures or event management. At the same time, they have revealed the risks of algorithmic redirection: residential streets not designed for high traffic volumes may become overloaded, generating safety concerns and local discomfort. These phenomena reveal two important insights: drivers are willing to share mobility data and follow algorithmic recommendations when tangible benefits exist, and traffic coordination systems must be designed responsibly to avoid negative systemic effects.
These observations motivate the development of a Digital Twin–driven Co-Pilot capable of generating contextualized speed recommendations to support traffic coordination in congested regions. Rather than imposing centralized control, this approach proposes a gradual and user-accepted form of assistance that complements, rather than replaces, existing driving practices. The ongoing evolution of autonomous vehicles provides an additional rationale. According to SAE J3016, commercially available systems remain at autonomy levels 2–3, requiring continuous human supervision; full level 5 autonomy remains distant due to unresolved technical, legal, and societal barriers. In this transitional context, vehicles increasingly function as intelligent assistants rather than fully autonomous agents. This perspective aligns with the Co-Pilot concept developed in this work: an incremental, practical model that integrates seamlessly with existing mobility ecosystems.
The research also aligns with major policy frameworks such as the Digital Agenda for Europe, the EU Urban Agenda for Smart and Sustainable Cities, and the United Nations Sustainable Development Goal SDG 11 (Sustainable Cities and Communities), all of which emphasize digital transformation, mobility efficiency, and citizen-centered innovation. By fostering safer, cleaner, and more efficient mobility through data-driven coordination, the proposed approach contributes to these overarching objectives.
Against this background, this paper introduces a conceptual framework for a Digital Twin–driven Co-Pilot that provides adaptive speed recommendations in congested urban traffic. The model leverages driver-sourced data, real-time simulation capabilities, and the predictive power of DTs to evaluate multiple candidate scenarios for a selected Region of Congestion (ROC). Unlike centralized traffic control or fully autonomous solutions, the proposed design emphasizes distributed, collaborative decision support that can operate using existing communication infrastructures. Moreover, by exploiting anticipatory simulations, the Co-Pilot can mitigate the limitations of current mobile networks—whose latency characteristics often remain closer to 4G than to the ultra-low-latency promises of 5G—thus providing timely recommendations even under non-ideal communication conditions.
The remainder of this paper is structured as follows.
Section 2 reviews related work on Digital Twins, cooperative driving, and traffic coordination.
Section 3 presents the conceptual Co-Pilot architecture and associated data flows.
Section 4 illustrates the model using an example urban scenario.
Section 5 discusses the experimental results, benefits, and limitations of the approach. Finally,
Section 6 concludes the paper and outlines directions for future research.
2. Background and Related Work
Urban congestion has long motivated the development of Intelligent Transportation Systems (ITS), with early research focusing on adaptive traffic signal control (ATSC). Classical ATSC deployments demonstrated consistent reductions of 15–20% in waiting times and measurable improvements in intersection throughput [
5]. More recently, large-scale mobile applications such as Google Maps and Waze have shown how voluntary data sharing and algorithmic routing can significantly reshape urban traffic flows [
6,
7]. However, these systems also raised concerns regarding unintended spillover effects, including the redirection of heavy traffic onto residential streets not designed for such volumes, with documented safety and social implications [
8].
Digital Twins (DTs), have been widely explored in transportation research as tools for real-time monitoring and scenario-based optimization [
9]. In the mobility domain, DT-based frameworks have been used for congestion prediction, adaptive routing, and speed recommendation [
1,
5]. Notable initiatives include the NREL project in the United States, which reported a 32% reduction in traffic delays by integrating real-time data with high-performance computing [
10], and the C2SMART program in New York City, which demonstrated how IoT-enabled DTs can support adaptive traffic management at the urban scale.
Recent research further expands these directions. Gao et al. proposed a DT-enabled Internet of Vehicles (IoV) architecture to support cooperative decision-making in connected mobility environments [
11]. Llagostera-Brugarola et al. introduced a macroscopic DT for ITS that incorporates real-time incident data and adaptive speed strategies [
12]. Wang et al. reviewed cooperative driving in intelligent connected vehicles, emphasizing the importance of V2X communication and distributed coordination algorithms in platooning scenarios [
13]. Long et al. presented an AI-enabled DT framework for sustainable mobility applications, highlighting use cases such as eco-driving, risk prediction, and congestion mitigation in smart cities [
14].
Within the broader scope of Future Internet research, recent surveys emphasize the growing importance of intelligence-based V2X strategies, predictive algorithms, and hybrid cooperative mechanisms for real-time mobility optimization [
15]. These contributions confirm that DTs and V2X technologies are increasingly viewed as foundational enablers of adaptive, connected mobility. However, existing literature rarely addresses driver-oriented Co-Pilot systems that operate on today’s widespread 4G networks while remaining compatible with emerging 5G/6G infrastructures. The mentioned references were selected to cover both foundational DT and ITS literature as well as recent advances in predictive simulation and cooperative mobility.
This work addresses that gap by proposing a Digital Twin–driven Co-Pilot designed to support collaborative speed coordination in congested traffic. In contrast to centralized optimization or fully autonomous systems, the Co-Pilot emphasizes distributed, user-centric decision support. Moreover, by leveraging anticipatory simulations, the model can mitigate the latency constraints inherent to current mobile networks—still predominantly 4G in many regions—while offering a pathway toward scalable integration with future ultra-low-latency V2X technologies.
3. Conceptual Framework
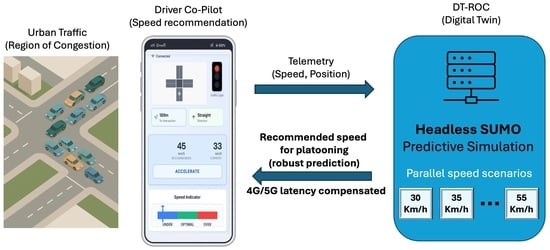
The proposed Co-Pilot operates over a distributed Digital Twin architecture. Each Region of Congestion (ROC) is represented by a dedicated Digital Twin instance (DT-ROC), which maintains continuous alignment with the corresponding real-world traffic segment. This localized representation provides the initial conditions for executing short-horizon predictive simulations based on the most recent traffic data. Through this continuous synchronization, the Co-Pilot ensures that simulations remain anchored to actual traffic evolution, enabling timely and context-aware speed recommendations. The architecture integrates real-time data acquisition, short-horizon anticipatory simulation, and collaborative decision-making across local and global instances.
3.1. System Architecture
Figure 1 illustrates the three functional layers of the Co-Pilot framework, each responsible for a distinct aspect of sensing, simulation, or coordination.
- i.
Infrastructure and Communication Layer.
Vehicles equipped with smartphones or on-board units periodically transmit telemetry—including speed, acceleration, position, and heading—to a lightweight API endpoint. The communication design is intentionally minimal to ensure compatibility with existing 4G networks while remaining forward-compatible for 5G/6G V2X systems.
- ii.
Local Coordination Layer (DT-ROC/Platoon Coordination Subsystem).
Each Region of Congestion (ROC) hosts a localized Digital Twin instance responsible for maintaining an up-to-date internal representation of the traffic state. Before each predictive cycle, the DT-ROC reconstructs a traffic snapshot using the most recent telemetry stored in the local database—such as vehicle positions, speeds, accelerations, headings, and lane assignments.
This snapshot provides the initial condition from which the DT-ROC evaluates multiple speed hypotheses. For each hypothesis, the system prepares a SUMO configuration that differs only in the imposed target speed for vehicles entering the ROC, while preserving the network geometry, demand pattern, and driver behavior parameters (IDM). SUMO (Simulation of Urban MObility) is an open-source microscopic traffic simulator widely used in ITS research for modeling vehicular interactions, queue formation, and road-network dynamics.
The DT-ROC supports parallel execution of several short-horizon simulations, allowing the framework to evaluate alternative future evolutions of traffic under different speed regimes. Simulation outputs (e.g., queue length, waiting time, throughput) are stored locally for comparison and decision-making. In our evaluation, ten speed scenarios were tested, though the architecture scales dynamically based on available computational resources.
- iii.
Global Digital Twin Layer.
A federated Global DT aggregates state information from all DT-ROC instances. It maintains cross-regional consistency (e.g., between adjacent intersections or corridors) without overriding local autonomy. This layer ensures that distributed predictions remain consistent when multiple ROCs interact, preventing conflicting recommendations across adjacent regions.
To avoid ambiguity, we explicitly define the terminology used throughout this work:
Simulation refers to the deterministic execution of microscopic traffic dynamics in SUMO based on a defined network topology, demand model, and vehicle behavior model (IDM).
Prediction denotes the short-term estimate of traffic evolution obtained by advancing the Digital Twin forward in time through simulation, typically over a horizon of 30–60 s. The predicted state results directly from the simulation outcomes, not from statistical extrapolation.
Forecast represents long-term statistical or model-based projection. Forecasting is outside the scope of this work.
In the Co-Pilot framework, predictive simulations correspond to executing multiple SUMO runs in parallel—each under a different target speed—to anticipate how congestion would evolve from the current measured state. These predictive trajectories enable the Co-Pilot to mitigate network latency and provide proactive recommendations aligned with likely near-future conditions. Simulation is thus the core mechanism by which prediction is generated.
3.2. Federated Multi-ROC Configuration
Urban congestion typically emerges simultaneously across multiple hotspots rather than as an isolated bottleneck. The framework therefore supports a federated multi-ROC configuration, illustrated in
Figure 2, where each ROC runs an independent DT-ROC instance. These instances exchange state updates asynchronously with the Global DT to maintain regional coherence.
The architecture provides three key properties:
Local autonomy—each DT-ROC computes its own speed recommendations on the most recent local telemetry;
Global coherence—the Global DT ensures that local decisions remain compatible with upstream and downstream flows;
Scalability—because each DT-ROC operates as an autonomous module whose interaction with the Global DT is limited to exchanging lightweight state summaries, new ROCs can be added or removed without requiring reconfiguration of existing instances. The loose coupling between modules ensures that the system scales naturally as additional congestion regions are introduced.
In the present work, the exchange mechanism between local DT-ROC instances and the Global Digital Twin is proposed as a conceptual extension aimed at enabling coordination across multiple adjacent congestion regions. In a future implementation, each DT-ROC would periodically transmit a compact state summary—including estimated demand, queue formation trends, dominant speed regimes, and predicted short-horizon inflow/outflow—to the Global DT.
Based on these asynchronous updates, the Global DT would aggregate upstream and downstream information to estimate boundary conditions for each ROC. These boundary conditions could be used to parameterize the SUMO configuration of each DT-ROC; for example, by adjusting inflow rates on entry edges, modifying lane priorities, or injecting expected arrival patterns derived from neighboring regions.
This soft-coupling mechanism would support coherence across interacting ROCs without requiring strict synchronization. The Global DT would not override local autonomy; rather, it would provide context that enhances the predictive accuracy of each local simulation. Although not implemented in the current prototype, this extension outlines a technically feasible pathway for scaling the Co-Pilot architecture to larger urban networks where congestion dynamics propagate across multiple intersections.
3.3. Predictive Coordination Loop
Across all active ROCs, the Co-Pilot executes a repeating four-stage loop:
1. Sensing: real-time telemetry is collected and stored in the local DT-ROC database.
2. Simulation: using the most recent traffic snapshot maintained by the DT-ROC, several short-horizon SUMO simulations are executed in parallel. All simulations begin from the same reconstructed state but differ in the target speed applied to entering vehicles, allowing the system to project multiple plausible short-term evolutions of traffic. Each instance runs in headless mode for efficiency and computes key indicators (e.g., throughput, waiting time, queue length) that will be compared in the subsequent decision step.
3. Decision: the prediction engine evaluates throughput, travel time, and waiting time to identify a robust speed interval —rather than a single optimal value—that minimizes congestion effects.
4. Recommendation: the speed guidance is transmitted to the driver’s mobile application.
Because each simulation horizon is short (typically 30–60 s) and the SUMO engine executes these scenarios significantly faster than the corresponding physical time (as demonstrated in
Section 5.3, where a 30–60 s horizon is computed within 0.3–3 s of wall-clock time), the Co-Pilot can generate predictions that advance ahead of real-world traffic evolution. In this context, ‘real time’ refers to the temporal alignment between the simulated horizon and the physical traffic it represents. The acceleration factor observed in our experiments enables the system to compute recommendations that correspond to a future time instant, thereby compensating for practical communication delays—such as 4G latencies in the 20–60 ms range—without violating temporal validity.
3.4. Emergent Robustness Under Latency
Although the Co-Pilot does not directly control vehicles, its predictive mechanism induces a form of emergent self-organization. When drivers follow a recommended speed range, variations in reaction time or acceleration are naturally absorbed within the platoon. This emergent damping effect is analogous to a low-pass behavioral filter within the platoon, that:
attenuates abrupt changes in velocity,
prevents disturbance propagation downstream, and
promotes stable and predictable flow dynamics.
Such robustness is particularly beneficial in networks with variable or asymmetric latency (e.g., 4G), where instantaneous synchronization is unrealistic. Instead of requiring perfect timing, the Co-Pilot leverages the inherent resilience of traffic flow and a robust recommendation window. Thus, preparing the system for real-world deployment where heterogeneous driver responses, device latencies, and communication variability coexist.
4. Operational Workflow and Data Processing Pipeline
This section details the operational workflow of the proposed Co-Pilot and the data processing pipeline that enables predictive speed recommendations in congested urban environments. While
Section 3 introduced the architectural layers and their interactions, the present section focuses on how data flows through the system—from acquisition to simulation and decision-making—within a real-world deployment scenario.
4.1. Data Acquisition and Pre-Processing
The process begins in the Infrastructure and Communication Layer (
Figure 1), where vehicles equipped with smartphones provide periodic telemetry updates. Each device transmits:
GPS position and heading;
Instantaneous speed;
Acceleration and deceleration patterns;
Optional metadata (e.g., mobile network type, signal quality).
These measurements are uploaded via a lightweight HTTP(S) API to the DT-ROC endpoint. To preserve practicality and compatibility with current mobile networks, telemetry packets are intentionally minimal in size (on the order of a few hundred bytes). At the DT-ROC, incoming data are normalized, time-stamped, and inserted into a local database that buffers measurements for the next predictive cycle.
4.2. Local Short-Horizon Predictive Simulation
Once new telemetry is available, the DT-ROC triggers a short-horizon simulation loop. Using headless SUMO, the local instance executes several parallel simulations, each configured with a distinct target speed (e.g., ten hypotheses ranging between 15 and 60 km/h). Parallel execution maximizes responsiveness and enables near real-time assessment of multiple strategies.
Within each simulation, SUMO evolves the current ROC state over a short temporal window (e.g., 20–60 s), approximating the near-future behavior of approaching vehicles. Each scenario yields outcome metrics such as:
These metrics form the basis for selecting a robust speed recommendation for the ROC.
4.3. Collaborative Multi-ROC Coordination
In scenarios where several ROCs coexist (
Figure 2), DT-ROC instances operate autonomously, but maintain asynchronous communication with the Global Digital Twin. This federated design ensures:
Consistency of upstream/downstream queue formation;
Conflict avoidance between adjacent intersections;
Regional synchronization of speed recommendations.
The Global DT does not override local decisions; instead, it acts as a higher-level consistency layer. This allows the system to scale organically across a city while remaining resilient to partial connectivity or intermittent packet loss—a realistic condition in heterogeneous 4G/5G deployments.
4.4. Latency-Aware Predictive Compensation
A defining property of the Co-Pilot workflow is its ability to compensate for network latency through prediction rather than relying on instantaneous communication. Since each DT-ROC simulates short-horizon futures that precede the moment of recommendation delivery, the system naturally anticipates the time offset introduced by:
Round-trip delays in 4G/5G networks;
Jitter associated with mobile networks;
Processing delays on the driver’s device.
Thus, even if recommendations are received several hundred milliseconds later, they remain valid because they target a future state for which the Digital Twin has already computed a trajectory. This predictive compensation is essential for deployment on today’s mobile networks where sub-10 ms latencies promised by URLLC 5G are rarely available in practice.
4.5. Human-Centered Feedback Integration
The final component of the workflow concerns the interaction with the driver. Recommendations are delivered via a mobile application that encodes the selected robust speed range in an intuitive interface. The display emphasizes:
The recommended speed (numerical and color-coded);
The current vehicle speed;
Progress toward the ROC or intersection;
Warnings when the vehicle diverges significantly from the recommended band.
Drivers remain fully responsible for vehicle control. However, by subtly influencing speed selection within a platoon approaching a congested region, the Co-Pilot induces a distributed form of cooperation, enabling smoother trajectories and reducing the amplitude of stop-and-go oscillations.
5. Validation Scenario and Discussion
5.1. Experimental Architecture
To validate the proposed Co-Pilot model and its operational feasibility, a proof-of-concept infrastructure was implemented using a combination of physical and virtualized components, as shown in
Figure 3. his setup demonstrates not only functional feasibility but also the practical deployability of a DT-driven assistance system using commodity hardware and existing communication infrastructures.
The testbed includes:
- ▪
a DT-ROC server (running SUMO and a REST API backend, containerized in Docker);
- ▪
a Proxmox virtualization host used for VM orchestration;
- ▪
a 4G router providing mobile network access;
- ▪
and a Cloudflare tunnel that exposes the local API endpoint securely to external devices over the internet.
This setup reproduces a realistic deployment scenario in which drivers, connected via a 4G/5G network, interact with the DT through a mobile interface. The DT-ROC performs short anticipatory simulations and returns updated speed recommendations to the user’s smartphone.
The SUMO simulation environment was configured to emulate a realistic Region of Congestion (ROC), imported from OpenStreetMap and “injected” with o flow between 600 and 2000 vehicles per hour on each considered route. The vehicles are modeled with the Intelligent Driver Model (IDM) behavior [
16,
17] implemented in SUMO.
Figure 4 illustrates the selected area and traffic layout used for the validation experiments.
The Co-Pilot mobile interface (
Figure 5) allows drivers to visualize both the current speed and the recommended speed computed by the DT-ROC.
It displays:
distance to the next intersection,
driving direction,
recommended vs. current speed (with a visual indicator of under/optimal/over speed),
and a live API log showing the latest synchronization message from the DT server.
This interface demonstrates the feasibility of a human-in-the-loop approach, where drivers remain active participants in maintaining platoon stability. The communication between the app and DT server occurs via a RESTful API, transmitting lightweight JSON payloads containing timestamped telemetry data.
While representative, this setup is still a controlled environment that abstracts away several complexities of real-world deployments (heterogeneous traffic, driver variability, multipath fading in mobile networks). These aspects are addressed in the limitations subsection.
5.2. Latency Evaluation
Latency evaluation was conducted to assess how different network paths influence the synchronization accuracy between the mobile user device and the DT-ROC server. Four communication scenarios were analyzed, as illustrated in
Figure 6:
(1) a client within the local LAN accessing the server via direct IP;
(2) a LAN client accessing the DT-ROC through a Cloudflare DNS tunnel;
(3) a mobile device connected through a 4G network; and
(4) a mobile device connected through a 5G network.
To estimate one-way client-server latency, we implemented a lightweight two-stage measurement procedure, illustrated in
Figure 7 and
Figure 8. First, the client performs a clock-alignment step by sending its local timestamp to the server; the server responds immediately, enabling an approximate offset to be computed under a symmetric-delay assumption. This offset is then applied to translate client-side timestamps into the server’s time domain. In the second stage, the client sends N = 20 timestamped test messages. Upon reception, the server records its own timestamp, computes the inferred one-way delay, and aggregates the results into a CSV report containing the mean, standard deviation, and minimum/maximum values. Although this method does not provide NTP-grade accuracy, it offers a practical and sufficiently stable approximation for evaluating DT-ROC performance under realistic communication conditions. One-way values should therefore be interpreted as estimates, but their precision is adequate for validating anticipatory guidance.
The results, summarized in
Table 1, show a clear separation between local and cellular paths:
direct LAN: 2.33 ms average latency,
LAN via Cloudflare tunnel: 6.75 ms,
4G mobile path: 45.5 ms,
5G mobile path: 18.84 ms.
Table 1.
One-way latency statistics for four network paths (LAN, Cloudflare tunnel, 4G, 5G), computed over 20 measurements per configuration.
Table 1.
One-way latency statistics for four network paths (LAN, Cloudflare tunnel, 4G, 5G), computed over 20 measurements per configuration.
| Network Configuration | Average
[ms] | St. Dev.
[ms] | Min
[ms] | Max
[ms] |
|---|
| (1) direct LAN access | 2.33 | 0.44 | 1.43 | 3.05 |
| (2) LAN access via Cloudflare DNS tunnel | 6.75 | 1.86 | 4.69 | 12.82 |
| (3) 4G mobile path | 45.5 | 10.24 | 21.37 | 65.42 |
| (4) 5G mobile path | 18.84 | 4.11 | 10.08 | 26.85 |
These findings reinforce the predictive compensation mechanism introduced in
Section 4.4. Even in the presence of higher and more variable delays—particularly the 4G case with values ranging from 20 to 65 ms—the Co-Pilot remains effective because recommendations are computed for a short-horizon future state rather than the instantaneous moment of reception. This demonstrates that the DT-ROC can maintain functional correctness even under non-ideal mobile network conditions.
5.3. Simulation Performance Analysis
To evaluate the computational efficiency of headless SUMO execution, we implemented a simple benchmarking procedure in Python 3.13.2 that measures the real execution time required to simulate various temporal horizons.
For each simulated duration in the range [], SUMO was executed in headless mode using the parameter --end = T_sim. The wall-clock execution time of each run was recorded, and the process was repeated for all horizon values with a fixed increment.
The pseudocode of the benchmarking procedure is provided below as Algorithm 1, illustrating the essential steps used to launch SUMO, suppress graphical output, measure execution time, and generate a performance curve mapping simulated time to real execution time.
| Algorithm 1 Evaluate_HEADLESS_SUMO_Execution |
| Input: |
| SUMO_CONFIG ← path to the .sumocfg file |
| T_start ← initial simulated time |
| T_end ← final simulated time |
| step ← increment of simulated horizon |
| |
| Initialize: |
| simulated_horizons ← list of values from T_start to |
| T_end with increment = step |
| execution_times ← empty list |
| |
| For each T_sim in simulated_horizons do: |
| //Prepare SUMO headless command |
| command ← “sumo -c SUMO_CONFIG --end T_sim |
| --duration-log.disable true” |
| |
| //Measure real execution duration |
| t_start ← current_wall_clock_time() |
| run(command, suppress_output = true) |
| t_end ← current_wall_clock_time() |
| |
| duration ← t_end − t_start |
| append execution_times with duration |
| End For |
| |
| //Generate performance visualization |
| Plot(simulated_horizons, execution_times, |
| x_label = “Simulated time (s)”, |
| y_label = “Execution time (real seconds)”) |
| |
| End Algorithm |
The execution profiles obtained for different simulated horizons are shown in
Figure 9 and
Figure 10. The experiments were conducted on a MacBook Pro equipped with an Apple M2 Max processor, running SUMO in headless mode. The results indicate that the real execution time grows slowly and nearly linearly with the length of the simulated horizon, while remaining well below one second even for a 600 s simulation. For short horizons (2–60 s), execution times stabilize around 0.18–0.22 s, with a higher initial value caused by startup overhead. For longer horizons (10–600 s), execution time increases smoothly from approximately 0.20 s to roughly 1.0 s. These findings confirm that SUMO simulations can be executed significantly faster than real time on commodity hardware, validating the feasibility of using short-horizon predictive simulations within the Digital Twin Co-Pilot architecture.
These execution times demonstrate that the DT-ROC has sufficient computational headroom to evaluate multiple alternative strategies within the time constraints of real-world traffic evolution, thereby supporting real-time anticipatory decision-making. It is important to note that these results correspond to a relatively small ROC; larger networks may increase computational load. However, the architecture naturally supports partitioning into multiple DT-ROC instances.
5.4. Batch Simulation and Throughput Evaluation
To assess the ability of the Digital Twin to evaluate multiple speed hypotheses in parallel, we conducted a batch experiment in which ten independent SUMO simulations were executed concurrently under identical conditions. Each simulation instance evaluated a 600 s traffic horizon using a different target speed, while SUMO ran in headless mode to minimize overhead. The purpose of this experiment was not to identify a single optimal speed, but to demonstrate that a DT-ROC instance can explore an entire range of candidate speeds fast enough to support real-time anticipatory decision-making, validating the predictive selection mechanism discussed in
Section 4.4. Thus, the goal of this experiment was to validate the technical feasibility of running multiple forward simulations fast enough to enable predictive coordination.
The parallel execution procedure is summarized in the Algorithm 2 below, which launches N SUMO processes in a multiprocessing pool, each configured with the same simulation horizon but assigned a distinct speed scenario. For each instance, the wall-clock execution time is recorded and later aggregated into a CSV file. This approach enables a full set of candidate speed configurations to be evaluated within a few seconds, thereby validating the feasibility of predictive Digital Twin operation.
| Algorithm 2 Parallel_SUMO_Batch_Test |
| Input: |
| SUMO_BINARY ← path to SUMO executable |
| CONFIG_FILE ← SUMO .sumocfg file |
| H_sim ← simulated duration (e.g., 300 s) |
| N ← number of parallel simulations (e.g., 10) |
| |
| Procedure RunSingleSimulation(id, H_sim): |
| t_start ← wall_clock_time() |
| Execute: |
| SUMO_BINARY -c CONFIG_FILE --step-length 1 |
| --end H_sim |
| (suppress stdout/stderr) |
| t_end ← wall_clock_time() |
| return (id, t_end − t_start) |
| |
| Procedure RunParallelBatch(H_sim, N): |
| batch_start ← wall_clock_time() |
| Launch N parallel workers: |
| For each i in {0 … N − 1} do: |
| RunSingleSimulation(i, H_sim) |
| Collect all execution times into list R |
| batch_end ← wall_clock_time() |
| |
| total_batch_time ← batch_end − batch_start |
| Save R to CSV file |
| |
| return total_batch_time, R |
| |
| Output: |
| total_batch_time //total duration for N parallel |
| //simulations |
| R //per-instance execution times |
| |
| End Algorithm |
The results obtained for τ = 0.5 and a simulation horizon of 600 s are presented in
Table 2, which reports throughput, travel time, waiting time, and simulation-to-real-time ratios for target speeds between 15 km/h and 60 km/h. The batch of ten SUMO simulations completed in approximately 2.2 s on a MacBook Pro M2 Max, confirming the ability of the DT to run multiple forward simulations significantly faster than real time.
The values reveal a clear pattern: while throughput increases sharply from 15 km/h to 35–40 km/h, the gains beyond this point are marginal. For example, throughput at 35 km/h and 40 km/h (332 and 351 vehicles, respectively) is nearly identical, and waiting times remain low and stable for both speeds. This shows that higher speeds provide no meaningful benefit once the flow enters its most efficient region. The U-shaped relationship between target speed and waiting time further supports this observation: very low and very high speeds induce instability, whereas moderate speeds produce the most predictable and robust behavior.
Crucially, these results demonstrate that safe, moderate speeds can achieve performance comparable to higher speeds, a key property for real-world deployment where safety, comfort, and predictability are essential. This aligns with the broader purpose of the experiment: to show that a Digital Twin–driven Co-Pilot can evaluate multiple speed scenarios rapidly and identify a robust operating window (35–50 km/h) suitable for platooned traffic under realistic conditions. The ability to compute these insights within a few seconds validates the feasibility of integrating domain-specific ITS logic into a predictive Digital Twin framework. We recall that the goal of this experiment was not to determine an exact optimum speed under all conditions, but to validate the technical feasibility of running multiple forward simulations fast enough to enable predictive coordination.
5.5. Discussion and Limitations
The experimental results collectively demonstrate that the proposed Digital Twin–driven Co-Pilot is both feasible and technically robust under the constraints of current urban communication infrastructures. The system achieved real-time operational performance on commodity hardware, with parallel headless SUMO simulations consistently running faster than real time and enabling anticipatory guidance. Network measurements confirmed that typical 4G/5G latencies are sufficiently low for the Co-Pilot to maintain synchronization with the physical environment, particularly because the predictive engine evaluates future states within a short simulation horizon. This finding illustrates one of the core advantages of the approach: the system does not require ultra-low-latency V2X links to remain effective, as prediction naturally compensates for communication delays.
The successful integration of the mobile interface further highlights the viability of a human-in-the-loop architecture, where drivers receive continuously updated speed recommendations while contributing telemetry back to the DT-ROC. This cooperative loop aligns with the current trajectory of intelligent transportation systems, where mixed autonomy, incremental digitalization, and interoperability with legacy vehicles are central challenges.
Despite these promising results, several limitations must be acknowledged.
First, the evaluation relied on synthetic traffic scenarios and deterministic driver behavior as defined by SUMO’s IDM. These do not fully capture the variability and unpredictability of human driving, nor the effects of mixed traffic involving pedestrians, cyclists, or non-motorized vehicles. Second, the experiments considered a single ROC; although the architecture supports multiple interacting DT-ROC instances, additional work is required to analyze behavior in large-scale, multi-region deployments with complex propagation of congestion. Third, the latency estimation method assumes symmetric client–server delays, which provides an approximation rather than exact one-way measurements. Fourth, sensing was performed using smartphone GNSS data, which may introduce non-negligible positioning errors in dense urban environments.
Lastly, while the Co-Pilot ran efficiently on commodity hardware, the computational load may increase significantly for larger simulation areas or more complex prediction strategies. In such scenarios, hierarchical ROC splitting, GPU acceleration, or cloud–edge orchestration may be needed.
Overall, the results indicate that predictive DT-based coordination can operate reliably under real network conditions and can be integrated into existing mobility ecosystems without requiring dedicated V2X infrastructure. The method provides a practical pathway for gradual adoption of Digital Twin technologies in urban mobility, bridging the gap between today’s 4G-dominated environment and the emerging 5G/6G paradigms that will support tighter coordination, higher fidelity, and more advanced multi-agent cooperation.
Furthermore, while the results demonstrate the feasibility and responsiveness of the proposed predictive mechanism, full empirical validation—using real-world traffic traces, controlled field trials, or comparative benchmarking against established prediction models—remains beyond the scope of this conceptual study. This represents a key direction for future research, particularly for assessing long-term accuracy, generalizability across different urban contexts, and integration with heterogeneous vehicular data sources.
6. Conclusions and Future Work
This work proposed and validated a Digital Twin–driven Co-Pilot framework for adaptive speed coordination in congested urban environments, leveraging anticipatory simulations and real-time data exchange between physical vehicles and their digital counterparts. The main contribution lies in demonstrating that parallel, headless SUMO simulations can function as a predictive layer of a distributed Digital Twin, producing latency-tolerant speed recommendations within milliseconds and operating faster than real time on commodity hardware.
The experimental architecture combined a containerized DT-ROC instance, a REST-based communication interface, Cloudflare-secured tunneling, and mobile connectivity via 4G and 5G networks. Measured latencies (19–65 ms) confirmed that the system can maintain sufficiently synchronized behavior even without dedicated V2V or URLLC infrastructure. Through short-horizon predictive evaluation, the Co-Pilot compensates for network delays, providing drivers with stable speed guidance that supports self-organization within traffic flows.
From a computational perspective, the DT-ROC demonstrated the ability to evaluate multiple speed scenarios concurrently, completing up to 600 s simulations in seconds of wall-clock time. This supports the scalability of distributed Digital Twin architectures for real-time decision making in Intelligent Transportation Systems, enabling predictive assessments ahead of the physical evolution of traffic.
The findings position the Co-Pilot framework within a broader research direction focused on synchronous DT orchestration and hybrid edge–cloud deployments. The demonstrated feasibility of high-fidelity simulation and low-latency communication on everyday hardware shows that predictive Digital Twins can already operate effectively within existing infrastructures, while remaining inherently compatible with future 5G/6G and V2X ecosystems.
Future work will extend the framework in several directions:
(i) incorporating heterogeneous driver behavior and stochastic micro-dynamics;
(ii) expanding validation to multi-ROC, city-scale deployments;
(iii) integrating more accurate clock synchronization and sensor fusion techniques;
(iv) leveraging edge computing and hardware acceleration for larger simulation domains; and
(v) evaluating user adoption patterns and behavioral responses to speed recommendations.
Taken together, these developments aim to refine the Co-Pilot into a deployable, scalable component of next-generation intelligent mobility systems, contributing to safer, cleaner, and more efficient urban transportation. The conclusions reflect the experimental findings and the validated feasibility of the proposed approach.
Author Contributions
Conceptualization, A.V.O. and M.N.; methodology, A.V.O., M.N. and S.M.; software, A.V.O. and M.N.; validation, A.V.O. and B.A.; formal analysis, A.V.O., M.N. and S.M.; investigation, A.V.O. and B.A.; resources, A.V.O. and B.A.; data curation, A.V.O.; writing—original draft preparation, A.V.O.; writing—review and editing, M.N.; visualization, S.M.; supervision, M.N.; project administration, M.N.; funding acquisition, M.N. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by a grant from the National Program for Research of the National Association of Technical Universities—GNAC ARUT 2023.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author(s).
Acknowledgments
During the preparation of this manuscript, the authors used ChatGPT (OpenAI, GPT-5.1) for the purposes of reformulating selected sentences to improve clarity and conciseness in English. The authors have reviewed and edited all generated text and take full responsibility for the content of this publication.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| 5G SA | 5G Standalone |
| API | Application Programming Interface |
| ATSC | Adaptive Traffic Signal Control |
| DB | Database |
| DT | Digital Twin |
| DT-ROC | Digital Twin-Region of Congestion |
| GNSS | Global Navigation Satellite System |
| GPU | Graphics Processing Unit |
| HTTPS | Hypertext Transfer Protocol Secure |
| IDM | Intelligent Driver Model |
| ITS | Intelligent Transportation Systems |
| IoV | Internet of Vehicles |
| JSON | JavaScript Object Notation |
| LAN | Local Area Network |
| NTP | Network Time Protocol |
| REST | Representational State Transfer |
| ROC | Region of Congestion |
| RTT | Round-Trip Time |
| SAE | Society of Automotive Engineers |
| SUMO | Simulation of Urban Mobility |
| URLLC | Ultra-Reliable Low-Latency Communications |
| V2V | Vehicle-to-Vehicle |
| V2X | Vehicle-to-Everything |
References
- Wang, K.; Li, Z.; Nonomura, K.; Yu, T.; Sakaguchi, K.; Hashash, O.; Saad, W. Smart Mobility Digital Twin Based Automated Vehicle Navigation System: A Proof of Concept. IEEE Trans. Intell. Veh. 2024, 9, 4348–4361. [Google Scholar] [CrossRef]
- Ge, C.; Qin, S. Digital Twin Intelligent Transportation System (DT-ITS)—A Systematic Review. IET Intell. Transp. Syst. 2024, 18, 2325–2358. [Google Scholar] [CrossRef]
- Dasgupta, S.; Rahman, M.; Lidbe, A.D.; Lu, W.; Jones, S. A Transportation Digital-Twin Approach for Adaptive Traffic Control Systems. arXiv 2021, arXiv:2109.10863. [Google Scholar] [CrossRef]
- Wu, K.; Li, P.; Cheng, Y.; Parker, S.T.; Ran, B.; Noyce, D.A.; Ye, X. A Digital Twin Framework for Physical-Virtual Integration in V2X-Enabled Connected Vehicle Corridors. IEEE Trans. Intell. Transp. Syst. 2024, 26, 14407–14420. [Google Scholar] [CrossRef]
- Almeaibed, S.; Al-Rubaye, S.; Tsourdos, A.; Avdelidis, N.P. Digital Twin Analysis to Promote Safety and Security in Autonomous Vehicles. IEEE Commun. Stand. Mag. 2021, 5, 40–46. [Google Scholar] [CrossRef]
- Van der Graaf, S. In Waze We Trust: Algorithmic Governance of the Public Sphere. Media Commun. 2018, 6, 153–162. [Google Scholar] [CrossRef]
- Gumasing, M.J.J.; Bermejo, F.J.C.S.; Elpedes, K.T.C.; Gonzales, L.F.E.; Villajin, A.C.V. Antecedents of Waze Mobile Application Usage as a Solution for Sustainable Traffic Management among Gen Z. Sustainability 2023, 15, 10186. [Google Scholar] [CrossRef]
- MacFarlane, J. When Apps Rule the Road: The Proliferation of Navigation Apps Is Causing Traffic Chaos. It’s Time to Restore Order. IEEE Spectr. 2019, 56, 22–27. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, H.; Wang, W.; Song, S.; Fu, X. Architecture, Application, and Prospect of Digital Twin for Highway Infrastructure. J. Traffic Transp. Eng. (Engl. Ed.) 2024, 11, 835–852. [Google Scholar] [CrossRef]
- NREL. Digital-Twin Project Green-Lights Traffic Congestion Improvements. Available online: https://www.nrel.gov/news/detail/program/2023/digital-twin-project-green-lights-traffic-congestion-improvements (accessed on 10 August 2025).
- Gao, J.; Peng, C.; Yoshinaga, T.; Han, G.; Guleng, S.; Wu, C. Digital Twin-Enabled Internet of Vehicles Applications. Electronics 2024, 13, 1263. [Google Scholar] [CrossRef]
- Llagostera-Brugarola, E.; Corpas-Marco, E.; Victorio-Vergel, C.; Lopez-Aguilera, E.; Vázquez-Gallego, F.; Alonso-Zarate, J. A Digital Twin for Intelligent Transportation Systems in Interurban Scenarios. Appl. Sci. 2025, 15, 7454. [Google Scholar] [CrossRef]
- Wang, B.; Han, Y.; Wang, S.; Tian, D.; Cai, M.; Liu, M.; Wang, L. A Review of Intelligent Connected Vehicle Cooperative Driving Development. Mathematics 2022, 10, 3635. [Google Scholar] [CrossRef]
- Long, K.; Ma, C.; Li, H.; Li, Z.; Huang, H.; Shi, H.; Huang, Z.; Sheng, Z.; Shi, L.; Li, P.; et al. AI-Enabled Digital Twin Framework for Safe and Sustainable Intelligent Transportation. Sustainability 2025, 17, 4391. [Google Scholar] [CrossRef]
- Bohra, N.; Kumari, A.; Mishra, V.K.; Soni, P.K.; Balyan, V. Intelligence-Based Strategies with Vehicle-to-Everything Network: A Review. Future Internet 2025, 17, 79. [Google Scholar] [CrossRef]
- Treiber, M.; Kesting, A. Traffic Flow Dynamics: Data, Models and Simulation; Springer: Berlin/Heidelberg, Germany, 2013; ISBN 9783642324604. [Google Scholar]
- Treiber, M.; Hennecke, A.; Helbing, D. Congested Traffic States in Empirical Observations and Microscopic Simulations. Phys. Rev. E 2000, 62, 1805–1824. [Google Scholar] [CrossRef] [PubMed]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









