Decentralized and Collaborative Scheduling Approach for Active Distribution Network with Multiple Virtual Power Plants


1
School of Electrical and Electronic Engineering, North China Electric Power University, Beijing 102206, China
2
Transportation College, Jilin University, Changchun 130012, China
*
Author to whom correspondence should be addressed.
Energies 2018, 11(11), 3208; https://doi.org/10.3390/en11113208
Submission received: 4 October 2018
/
Revised: 7 November 2018
/
Accepted: 12 November 2018
/
Published: 19 November 2018
(This article belongs to the Special Issue Optimization Methods Applied to Power Systems)
Abstract
:In order to build an active distribution system with multi virtual power plants (VPP), a decentralized two-stage stochastic dispatching model based on synchronous alternating direction multiplier method (SADMM) was proposed in this paper. Through the integration of distributed energy and large-scale electric vehicles (EV) in the distribution network by VPP group, coordinative complementarity, and global optimization were realized. On the premise of energy autonomy management of active distribution network (AND) and VPP, after ensuring the privacy of stakeholders, the power of tie-line was taken as decoupling variable based on SADMM. Furthermore, without the participation of central coordinators, the optimization models of VPPs and distribution networks were decoupled to achieve fully decentralized optimization. Aiming at minimizing their own operating costs, the VPPs aggregate distributed energy and large-scale EVs within their jurisdiction to interact with the upper distribution network. On the premise of keeping operation safe, the upper distribution network formulated the energy interaction plan with each VPP, and then, the global energy optimization management of the entire distribution system and the decentralized autonomy of each VPP were achieved. In order to improve the stochastic uncertainty of distributed renewable energy output, a two-stage stochastic optimization method including pre-scheduling stage and rescheduling stage was adopted. The pre-scheduling stage was used to arrange charging and discharging plans of EV agents and output plans of micro gas turbines. The rescheduling stage was used to adjust the spare resources of micro gas turbines to deal with the uncertainty of distributed wind and light. An example of active distribution system with multi-VPPs was constructed by using the improved IEEE 33-bus system, then the validity of the model was verified.
1. Introduction
1.1. Motivation
The clean transformation of energy brings great challenges to traditional power dispatching. In recent years, in order to relieve the pressure of energy shortage and environmental deterioration, many countries have accelerated the development of distributed energy resources (DER) and electric vehicles (EV) and other active loads. In the future, active distribution network (ADN) will be an important form of intelligent distribution network, which manages power flow through flexible network topology and can actively control and manage the local DER. However, many kinds of distributed new energy have randomness and volatility, and the strong uncertainty of its output brings challenges to the economic operation of power grid.
Besides, large-scale EVs access to the grid will generate a new round of load growth, which will aggravate the peak–valley load difference of the grid, and as a kind of mobile load, it will increase the difficulty of grid operation control. VPP provides a new solution for the above problems. VPP does not change the way of interconnecting all kinds of distributed energy, but aggregates all kinds of distributed energy and EV groups through advanced coordinated control technology, intelligent measurement technology, and communication technology. Coordinated and optimized operation is achieved through coordinated control on the upper level, so as to promote rational and optimal allocation and utilization of resources [1]. With the help of VPP aggregated EV and distributed renewable energy, the coordinated and optimized scheduling of large-scale EV and distributed renewable energy is carried out by utilizing the characteristics of distributed energy storage unit of power battery devices in EVs. This can effectively alleviate the adverse effects on the power grid caused by the disordered charging and discharging of EVs and the uncertainty of distributed renewable energy output.
1.2. Literature Survey
There are mainly three modeling methods for the uncertainty of distributed new energy output: stochastic programming, scenario method and robust optimization. Wang et al. [2] proposed a rolling scheduling model based on chance constrained programming to reduce the impact of the stochasticity of new energy output. Considering the maximum and minimum limit scenarios of new energy output, a two-stage scheduling model based on the limit scenario set is proposed [3]. Furthermore, Qiu et al. proposed a two-stage robust scheduling model for AC/DC hybrid microgrids [4].
Currently at home and abroad, there are many studies on the economic dispatch of single ADN, VPP, and EV groups. In the aspect of ADN scheduling, the second-order cone programming (SOCP) convex relaxation technique was proposed [5], which laid an important theoretical foundation for the global optimization of optimal power flow in distribution network. On the basis of [5], Liu et al. [6] studied the multi-period economic dispatch problem of active and reactive power coordination in ADN. Also, Li et al. [7] established a convex optimization model of SOCP for distribution network with high proportion photovoltaic. In [8], the OPF problem in AC/DC grids was studied to address the non-convexity problem. In the aspect of VPP scheduling, Dong et al. [9] studied the cooperative game strategy between VPP and distribution companies in the market environment. Pandzic et al. [10] considered the uncertainties of market price and distributed new energy output, then the medium-term dispatching model of VPP was established. In the aspect of EVs’ participation in scheduling, Zhuang et al. [11] established the economic scheduling model of micro-grid under the condition of EV charging and discharging mode. Zhang et al. [12] took EV quantity as charge and discharge power constraint, and an economic scheduling model was established. Furthermore, clustering according to the characteristics of EV itself, Huang and Yang et al. participated in power distribution in the form of EV group [13,14]. Therefore, with the popularity of EV, due to its mobile storage and transferable load characteristics, the large-scale EV will play an important role in grid operation.
However, there are relatively few researches on the scheduling problem of VPP or ADN with EV and distributed new energy. Aiming at the problem of VPP bidding strategy with large-scale EV, a robust scheduling model of VPP joint bidding in day-ahead energy market was established [15]. Considering the impact of VPP on the environment, a multi-objective VPP scheduling model with EV participation was established by Arslan et al. [16]. Moreover, Shaaban et al. studied the coordinated charging and discharging problem of AC/DC hybrid distribution network with EV [17]. Therefore, if DER and large-scale EV are connected to the active distribution system in the form of virtual power plants, they will carry out energy interaction with the distribution network according to their respective interests. This will break through the traditional mode of operation and management, and bring new challenges to the safe and economic operation of power distribution system.
In the environment of active distribution system with multi VPP in electricity market, ADN, and VPP agents have the characteristics of decentralization and autonomy, thus, the traditional centralized operation and management mode will no longer be applicable. However, the decentralized modeling method can model ADN and VPP as different stakeholders, which is more realistic. Lagrange relaxation method [18,19] is the most widely used decentralized scheduling method at present, while augmented Lagrange function method [20,21] improves the convergence performance by adding the boundary coupling constraint quadratic term. The augmented Lagrange function method mainly includes the auxiliary problem principle method [20] and the alternating direction method of multipliers (ADMM) [21]. Zhang et al. presented a decentralized scheduling method for micro-grid based on ADMM, but it requires the participation of higher-level coordinators [22]. In contrast, synchronous ADMM (SADMM) only needs to exchange information between adjacent regions in iteration instead of a higher-level coordinator. Therefore, all stakeholders can achieve completely decentralized autonomy [23]. Furthermore, Erseghe proposed a decentralized optimal power flow method for transmission networks based on SADMM [24]. However, there are few studies on decentralized scheduling models for active power distribution systems with multi VPP.
In this paper, distributed generators and large-scale EV were integrated by virtual power plants in distribution network to realize the coordination and complementarity of multiple distributed energy sources and the overall optimization. After that, a decentralized cooperative scheduling model of active distribution system with multiple virtual power plants was established based on the synchronous alternating direction multiplier method. Then, interactive power was taken as a decoupling variable to decouple the optimization model of virtual power plants and active distribution network. While ensuring the privacy of all stakeholders, the global energy optimization management and decentralized autonomy of the entire distribution system can be achieved.
1.3. Contributions
The contributions of this paper can be summarized as follows:
- (1)
- At present, the application of SADMM in power system optimal operation is few. Aiming at solving distributed day ahead scheduling problem, the SADMM was used in the distributed active distribution system with multiple VPPs. On the premise of autonomous energy management of ADN and VPPs, decoupling the optimization models of virtual power plants and distribution networks without the participation of central coordinators was realized to achieve fully decentralized optimization. Compared with the traditional centralized optimization methods, the method proposed in this paper has good convergence performance. It can achieve the scheduling independence of each agent, protect the data privacy of each agent, and is more suitable for the environment of the power market.
- (2)
- This paper integrated distributed energy and large-scale EVs in distribution network through VPP cluster, and adopts two-stage stochastic optimization method including pre-scheduling stage and re-scheduling stage to deal with the stochastic uncertainty of distributed wind and light outputs, so as to realize the collaborative complementarity and overall optimization of the whole distribution system. Compared with the independent optimization mode of distributed energy and EV and the traditional deterministic scheduling method without considering the uncertainty of wind and light, the model in this paper can make full use of the advanced coordinated control technology of VPP to aggregate the distributed energy and EV groups. Furthermore, it can make full use of the mobile energy storage characteristics of EVs, then the adverse effects of disorderly charging and discharging of EVs and uncertainties of distributed wind and light power outputs on dispatching operation of active distribution network were alleviated.
- (3)
- The simulation results showed that the proposed decentralized optimization method based on SADMM has good convergence performance, it can converge to almost the same running cost as centralized optimization by 16 iterations. When the discharge loss cost of power battery is high, VPP will not reduce the operation cost because of V2G reverse discharge of EV. However, under the incentive of electricity price policy, the EV charging load during peak load period is transferred to the low load valley to charge, which effectively reduces the operation cost and peak–valley load difference. The proposed two-stage stochastic optimization method can ensure that the day-ahead scheduling plan can be transferred to various error conditions smoothly. Although the operation cost has increased, it can effectively deal with the uncertainty of distributed scenery.
1.4. Organization
The remainder of this paper is arranged as follows. The scheduling model of active distribution system with multi virtual power plants are presented in Section 2. Section 3 proposes the distributed collaborative model based on SADMM. The simulations are described in Section 4, and the conclusions follow in Section 5.
2. Scheduling Model of Active Distribution System with Multi Virtual Power Plants
In this paper, considering the advanced coordinated control technology of VPP, VPP aggregate with large-scale EV and DER was utilized to participate in the economic operation of ADN. VPP would provide subsidies to EV users to encourage more EV registrations as schedulable VPP with dual functions of serving EV users’ distribution networks. Load forecasting, distributed new energy output forecasting, and EV centralized controller charging and discharging power were integrated by VPP to optimize scheduling. Then, a power generation plan, a EV charging and discharging plan and a power exchange plan with the distribution network were formulated.
For active distribution systems with multiple VPP, geographically close DER and load interact with the distribution network in the form of VPP, which coordinate the power interaction with the distribution network by arranging the DER output plan rationally. Therefore, each VPP and distribution network will act as different stakeholders, have different optimization objectives, and realize coupling operation through power interaction on the tie line. About the research objects of this paper, the active distribution network is a radial network, including conventional load, diesel generator (DG), and static var compensator (SVC). Moreover, the virtual power plant is composed of conventional load, photo voltaic photo voltaic (PV), wind turbine (WT), micro turbine (MT), and EV groups. EV is controlled by charging and discharging facilities to play its auxiliary energy storage role and help solve the uncertainty of the output of distributed PV and wind energy.
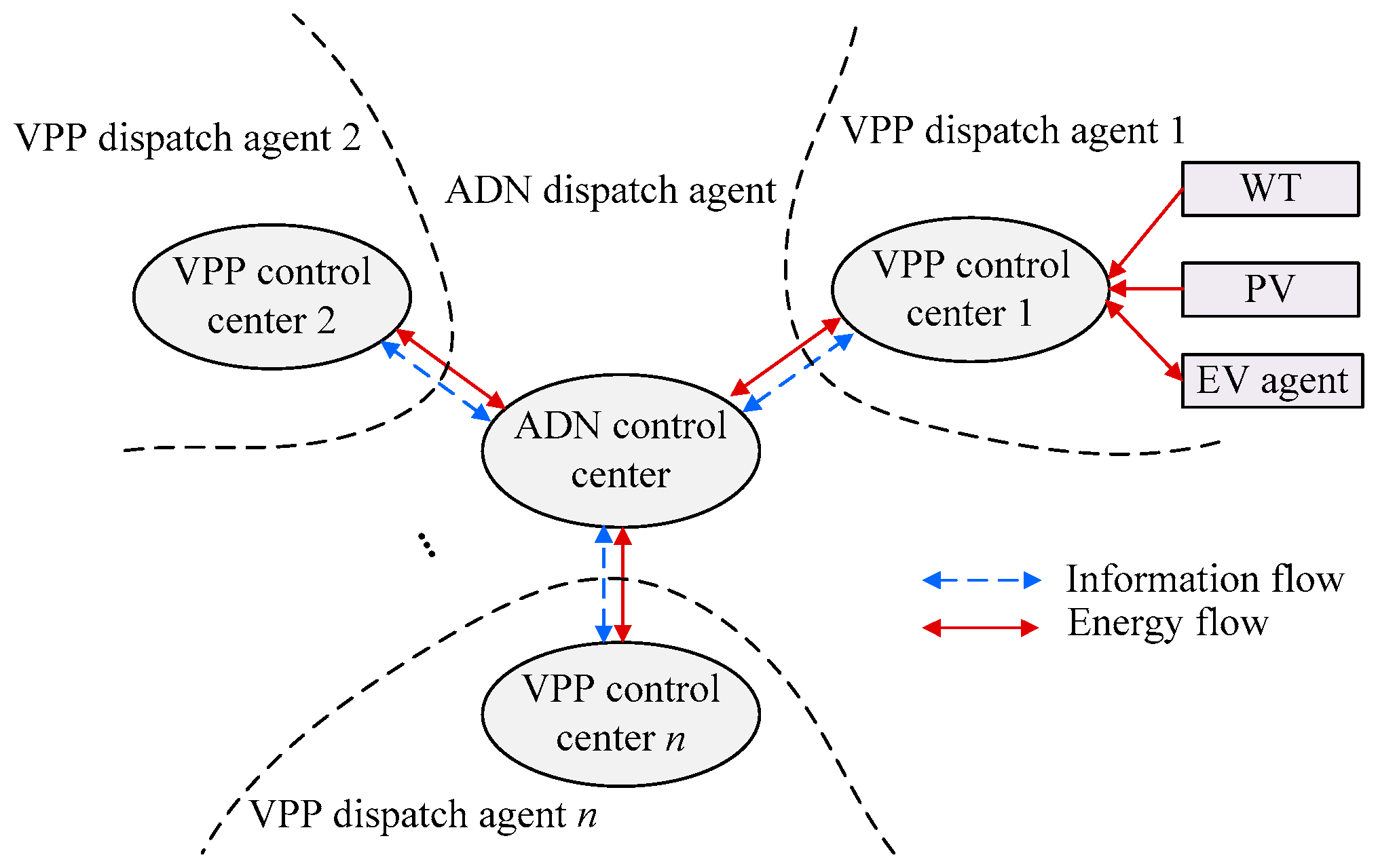
The centralized controller in VPP is the interface between EV and distribution network, which is able to serve EV users and distribution network. VPP coordinated control center integrates load forecasting, distributed new energy output forecasting, and optimal dispatching of charging and discharging power of EV centralized controller. Then the generation plan of generator set, charging and discharging plan of EV centralized controller and power exchange plan with distribution network were formulated. The dispatching instructions issued by the control center can charge and discharge the dispatchable EVs in an orderly manner, so as to overcome the adverse effects of the disorderly charging and discharging of large-scale EVs on the economic operation of the ADN. For the dispatchable EV in EV agent, it must be connected to the charging pile under the jurisdiction of the VPP centralized controller within the agreed time period, and the dispatching arrangement of the VPP is obeyed. The interaction framework of VPPs and ADN is shown in Figure 1.
2.1. Active Distribution Network Scheduling Model
2.1.1. Objective Function
The optimization objective of ADN is to minimize the sum of the generation cost of DG, the power interaction cost with each VPP and the ADN loss cost.
where , , , and respectively denote market price, operation and maintenance cost of DG and startup cost and network loss cost of DG. and respectively denote the output and starting action of DG. , , and respectively denote the set of internal nodes in the distribution network, the set of DG nodes and the set of VPP nodes. is the active interaction power between distribution network and VPP, while electricity purchase is positive and electricity sales is negative. is the three-phase resistance for branch ij. is the square of the current amplitude of the branch ij. is the branch end node set with j as the terminal node.
2.1.2. Constraints
(1) Constraints of DG outputs limitation
(2) Constraints of DG start/stop state and start/stop action
(3) Constraints of SVC operation
(4) Constraints of node voltage safety
(5) Constraints of interaction power among tie lines of VPP
(6) Constraints of branch network load flow
Active power and reactive power are coupled in distribution network. Active and reactive power flow will affect line loss and voltage quality. In this paper, branch power flow model of distribution network was used to describe branch power flow of ADN.
Considering the nonconvexity of constraints (7)–(9), it is difficult to obtain the optimal solution and the efficiency is low, so SOC relaxation technique [5] was adopted to solve this problem. Then, the square of node voltage amplitude and the square of branch current amplitude are defined in Equation (12).
According to [5], Equation (12) can be transformed into Equation (13)
Then, Equation (13) is written as a standard two order cone as Equation (14).
Therefore, branch flow constraints (7)–(9) can be deformed into Equation (15)
where is the three-phase reactance of branch ij. is the reference value of node voltage. and respectively denote the three phase active and reactive power flows from node i to node j. and respectively denote the active and reactive load of node j. is the branch terminal node set with j as the leading end node. and are the 0 1 variables. is power factor angle. is the reactive power interaction between distribution network and VPP. and respectively denote the purchase and sale of electricity from VPP. and respectively denote the active power limits and reactive power limits of the distribution network to VPP. is the DG reactive power outputs. is the allowable deviation percentage of node voltage. and respectively denote the upper and lower limits of DG. and respectively denote the minimum boot time and minimum shutdown time of DG. and respectively denote the climbing and landslide rates of DG. and respectively denote regulated power and maximum power of SVC. is start stop state of DG and is shutdown action identification of DG. and respectively denote the continuous boot time and continuous shutdown time from DG to time t − 1.
2.2. Two-Stage Stochastic Schedule Model for Virtual Power Plant
VPP coordinates the distribution of internal DER outputs to meet the load demand inside and maintain firm outputs. However, the distributed new energy outputs in the VPP is highly uncertain, which leads to some deviation between the scheduling plan formulated by the VPP and the actual operation. Therefore, when formulating a scheduling plan, VPP should take full account of the uncertainty of distributed new energy outputs. In addition, when the number of schedulable EVs in the EV centralized controller is large, the problem of dimensionality disaster will occur when a single EV is used as the scheduling object. Therefore, the EV centralized controller is considered as an EV agent to participate in the scheduling operation.
The established two-stage VPP stochastic scheduling model consists of pre-scheduling stage and prescheduling stage. The prescheduling stage is used to arrange the charging and discharging plan of EV agent and the base point of the outputs plan of MT. The decision-making results of the prescheduling stage are suitable for all PV and wind energy outputs in the rescheduling stage. The rescheduling stage is used to adjust the reserve resources of MT to cope with the uncertainty of PV and wind energy. The decision result of the rescheduling stage is the decision of all real-time operation scenarios based on the decision of the prescheduling stage, which is used to correct the imbalance of supply and demand in the real-time operation scenario. In the prescheduling stage, the PV and wind energy outputs—which may appear in the real-time operation—had been considered. By optimizing the MT outputs adjustment in the rescheduling stage, the PV and wind energy outputs which can be realized in any set are guaranteed to meet the safe and stable operation requirements of VPP.
2.2.1. Objective Function
The operation cost of VPP is composed of prescheduling stage cost and rescheduling stage cost. Prescheduling cost includes penalty cost for abandoning PV and wind energy, MT generation cost, purchase and sale cost from distribution network, and the owners’ battery loss cost which compensated by V2G services. The cost of rescheduling is adjustment expenses of MT outputs.
where , , , , and respectively denote operation and maintenance cost of MT, service compensation cost of V2G, punishment cost of abandoning wind, punishment cost of abandoning light, adjustment cost of MT outputs. S is the total number of PV and wind energy. and respectively denote positive reserve adjustment and negative reserve adjustment of MT in VPP i under condition s. is the implementation probability of condition s. and respectively denote the active power prediction value of PV and WT. is the power of V2G service provided by EV agent. is the outputs of MT. is the interaction power between VPP i and distribution network, the electricity purchase is positive while the sale of electricity is negative.
2.2.2. Constraint Conditions in Prescheduling Phase
(1) Restriction constraint of EV agent charging and discharging power
(2) Restriction constraint of EV agent residual power
(3) Constraint of VPP power balance
(4) Restriction constraint of MT outputs
(5) Restriction constraint of PV outputs
The interaction power constraint with ADN is similar to Equation (6), and WT output constraint is similar to PV. There is no need to repeat.
Where , , and respectively denote active power of MT, active outputs of PV, active output of WT and interaction active power between VPP i and ADN. , , and respectively denote reactive power of MT reactive power output of PV, reactive power outputs of WT and reactive power interaction between VPP i and ADN. and are 01 variables. and respectively denote charging and discharging efficiency of EV agents. and respectively denote maximum charging and discharging power of EV agents. and respectively denote minimum and maximum power limits for EV agents. is the power of EV agents. and respectively denote the active load and reactive load values of VPP i. and respectively denote the upper and lower limited outputs of MT. and respectively denote the climbing speed and landslide rate of MT. and respectively denote the positive reserve and negative reserve regulation of MT.
2.2.3. Constraints of Rescheduling Phase
(1) Restriction constraint of PV output conditions
(2) Constraint of MT climbing speed and landslide speed
(3) Constraint of the two-stage correlation
Two-stage correlation constraints represent the relationship between the scenario value of MT outputs in the rescheduling phase and the planned outputs base value and standby value of MT in the prescheduling phase, as shown in Equation (24).
where and respectively denote the active output of MT and the active output of PV under the conditions.
The WT scenario constraint is similar to PV, there is no need to repeat.
2.2.4. Boundary Coupling Characteristics between Virtual Power Plant and Active Distribution Network
The interaction power between ADN and VPP should be kept equal to represent the consistency of the whole interconnected system, so as to ensure the feasibility of the scheduling solution of the whole active distribution system with multiple VPP. The boundary coupling characteristic equation is shown in Equation (25).
3. Distributed Collaborative Model Based on SADMM
Under the background of power market, the scheduling participants of VPP and ADN in active distribution system with multiple VPPs belong to different stakeholders. Traditional centralized dispatching is no longer applicable. Therefore, decentralized collaborative model is needed to solve the problem in order to coordinate the interests of each stakeholder.
3.1. Basic Principles of Standard ADMM Algorithm
For an active distribution system with a VPP, its standard ADMM form can be expressed as Equation (26).
where F1 and F2 respectively denote objective function of VPP and ADN. A and B respectively denote the coupling coefficient matrix of VPP and ADN.
To solve the optimization problem iteratively, the newest value of ADN optimization is substituted into VPP and the multiplier vector is updated by the upper coordinator. The iteration process can be expressed in Equation (27).
where the first and second is the update formula of the internal variable. The third formula is the renewal formula of multiplier vectors, and β is a larger positive number.
3.2. The Basic Principle of SADMM Algorithm
Based on the above, the first and second terms of the augmented Lagrange function can be derived in Equation (28).
where is constant and can be omitted. Set , then the Equation (28) can be changed into Equation (29).
Then the average value of the boundary coupling variables which correspond to the last iteration result of VPP and ADN optimization problems is obtained.
Substituting Equation (30) in Equation (29).
The penalty term is the deviation between the interaction power of VPP and ADN and the optimal average value of the last boundary node in all VPP and ADN. As the iteration proceeds, the interactive power gradually tends to the last value, and finally the interactive power of all tie lines is consistent in each VPP and ADN. In SADMM-based decentralized optimization, the iterative variables of each VPP and ADN can be calculated independently without central coordinator and can be implemented in parallel. Detailed proof of convergence is detailed in [24].
3.3. The Solving Process
Based on the ADMM algorithm, each VPP and ADN agent respectively solves their economic scheduling plans until the convergence conditions shown in Equation (32) are satisfied.
where is the convergence precision.
The steps of solving the model are as follows:
- (1)
- Set the iteration number = 1, initialize the algorithm parameters of SADMM.
- (2)
- Independently solve the ADN and VPP economic dispatch models in a decentralized manner.
- (3)
- To judge whether Equation (32) is satisfied, if yes, the iteration ends, or continue the next step.
- (4)
- , update the tie line interaction power according to the Equations (30) and (31), and turn to step (2).
4. Example Analysis
The decentralized cooperative scheduling model of active distribution system with multiple VPPs is solved in a PC of which CPU is Intel core i5-8250U and memory is 8 GB. The test platform is MATLAB R20115a and the solver is Guribo 8.0.
4.1. Basic Data
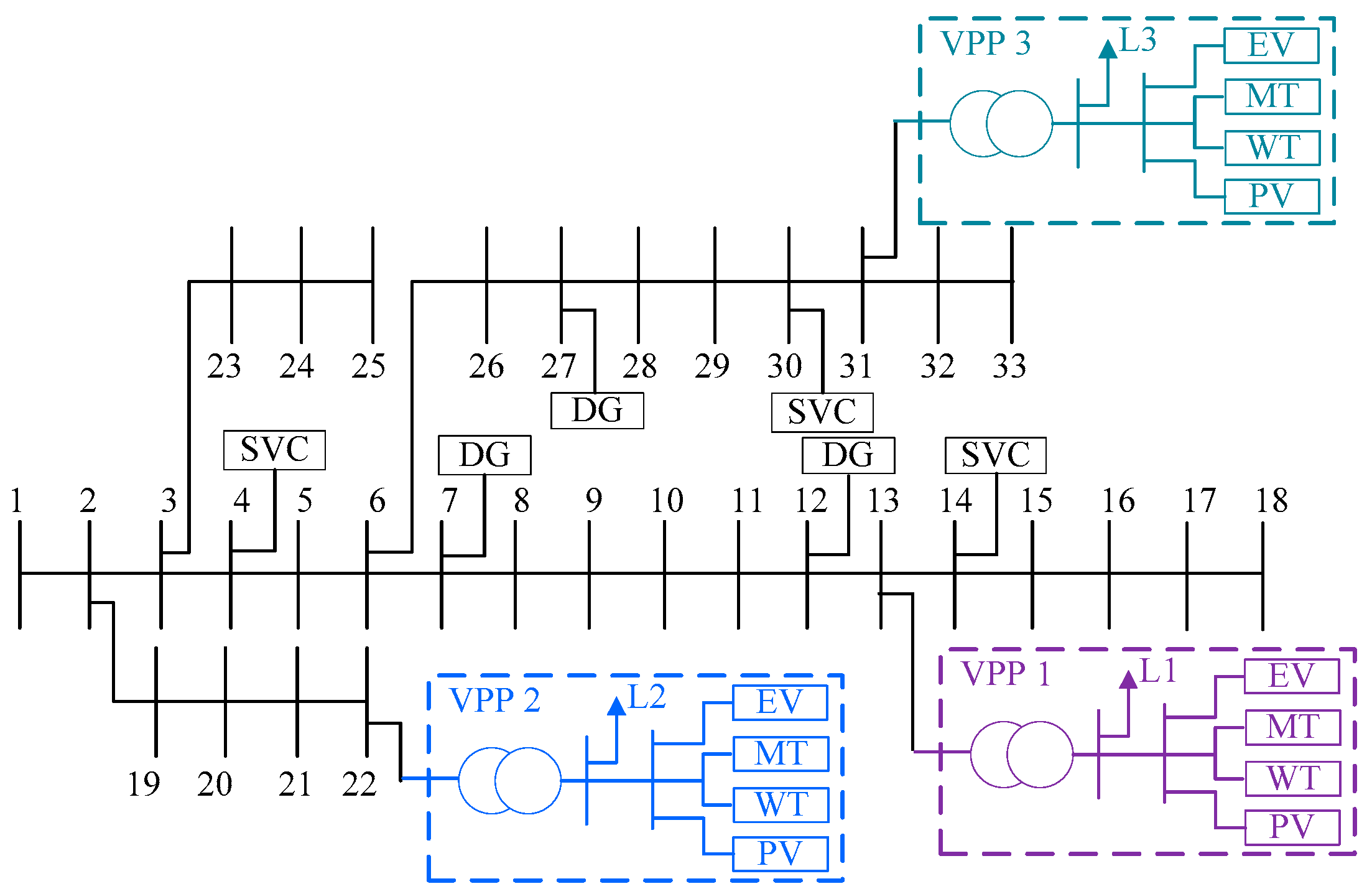
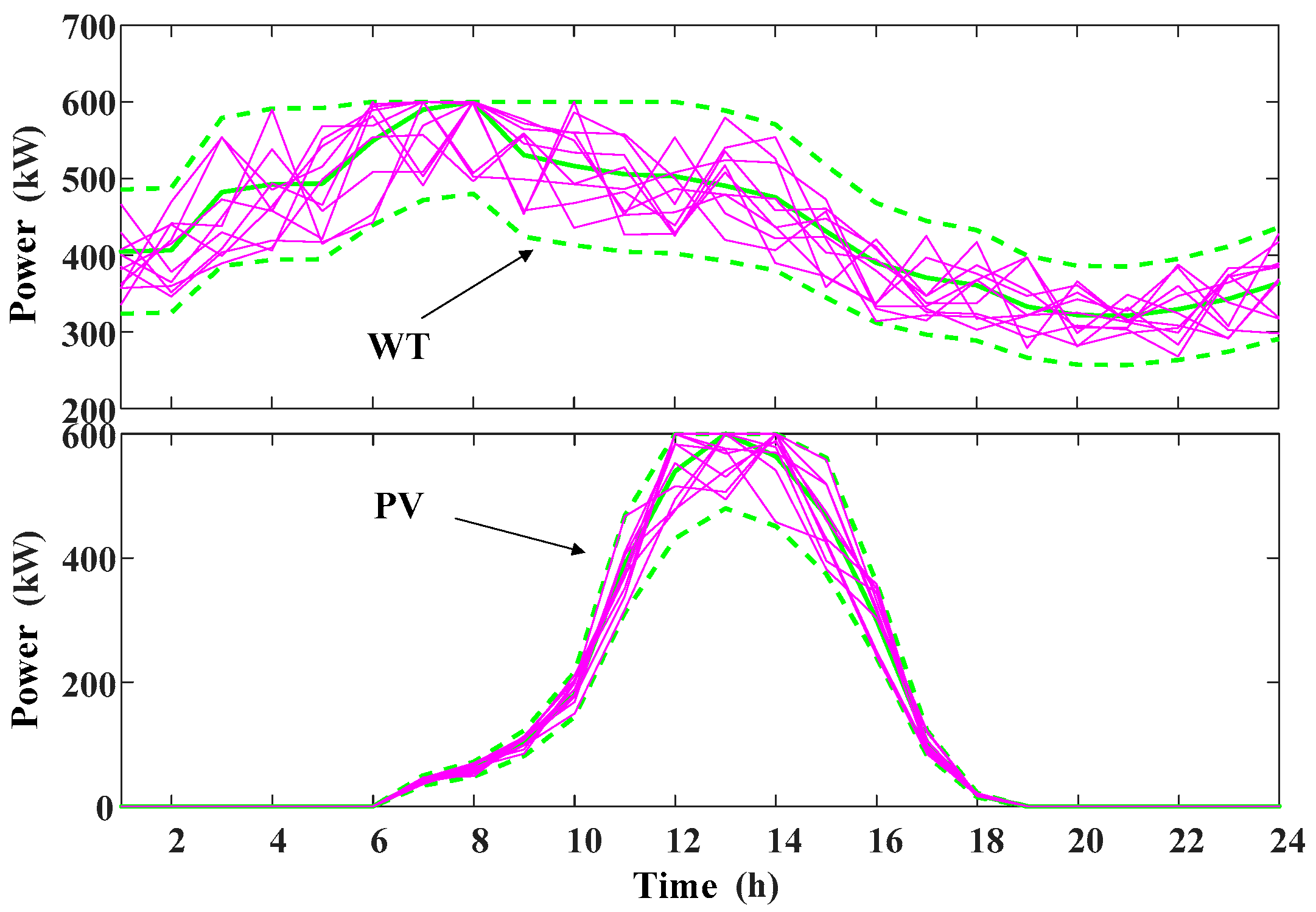
An active distribution system with three VPPs is constructed by connecting one VPP to the nodes 13, 22, and 31 of the IEEE 33 node distribution network and named VPP 1, VPP 2, and VPP 3 respectively. Each VPP contains 1 EV agents, MT, PV, and WT. Three DG are connected to nodes 7, 12 and 27 of the ADN, and three SVC are connected to nodes 4, 14, and 30 of the ADN respectively, as shown in Figure 2. Assuming that PV or WT in three VPP have the same predictive power, the predictive errors of PV and WT obey the normal distribution with the standard deviation of 20% of the predictive value. The predictive power and output interval of each PV and WT are shown in Figure 3. The combination of 10 PV and WT output conditions generated in this interval is also shown in Figure 3, and each scenario combination has the same probability of occurrence. The market electricity price and the total active load of ADN refer to [25]. The load of 3 VPP is ADN total load one-third. Assuming that the power factor of each node is fixed, the reactive load of ADN node and three VPP can be obtained by the power factor of each node. The network loss cost coefficient is the same as the market price. The reference value of network node voltage is 12.66 kV. The allowable voltage deviation ratio is 0.05 p.u. The upper limit of active and reactive power between VPP and ADN is 1 MW and 1 Mvar. Suppose that the upper charge limit of a single EV is 20 kWh, the lower discharge limit is 4 kWh, the maximum charge-discharge power is 5 kW, and the charge–discharge efficiency is 90%. The number of registered schedulable EVs in VPP 1, VPP 2, and VPP 3 is 50, 75, and 100 respectively, and it is assumed that the registered EVs are subject to scheduling arrangements. The MT, PV, and WT characteristics of each VPP are the same. The rated capacities of MT, PV, and WT are 600 kW, and the power factor is = 0.95. The DG rated capacity of ADN is 1000 kW, the minimum startup and shutdown time is 3 h, and the compensation range of SVC is [−1, 1] Mvar. The slope climbing and landslide rates of MT and DG in VPP and ADN are 30% of the rated capacity, and the operation and maintenance costs are 0.04 USD/kW, and the penalty cost of abandoning scenery is 0.04 USD/kW. MT output adjustment cost is 0.06$/kW, EV provides V2G services with a compensation price of 0.1$/kW. The convergence coefficient of SADMM algorithm is 0.01, and the initial values of active and reactive power transmitted between VPP and ADN are 0, β = 30,000.
4.2. Result Analysis
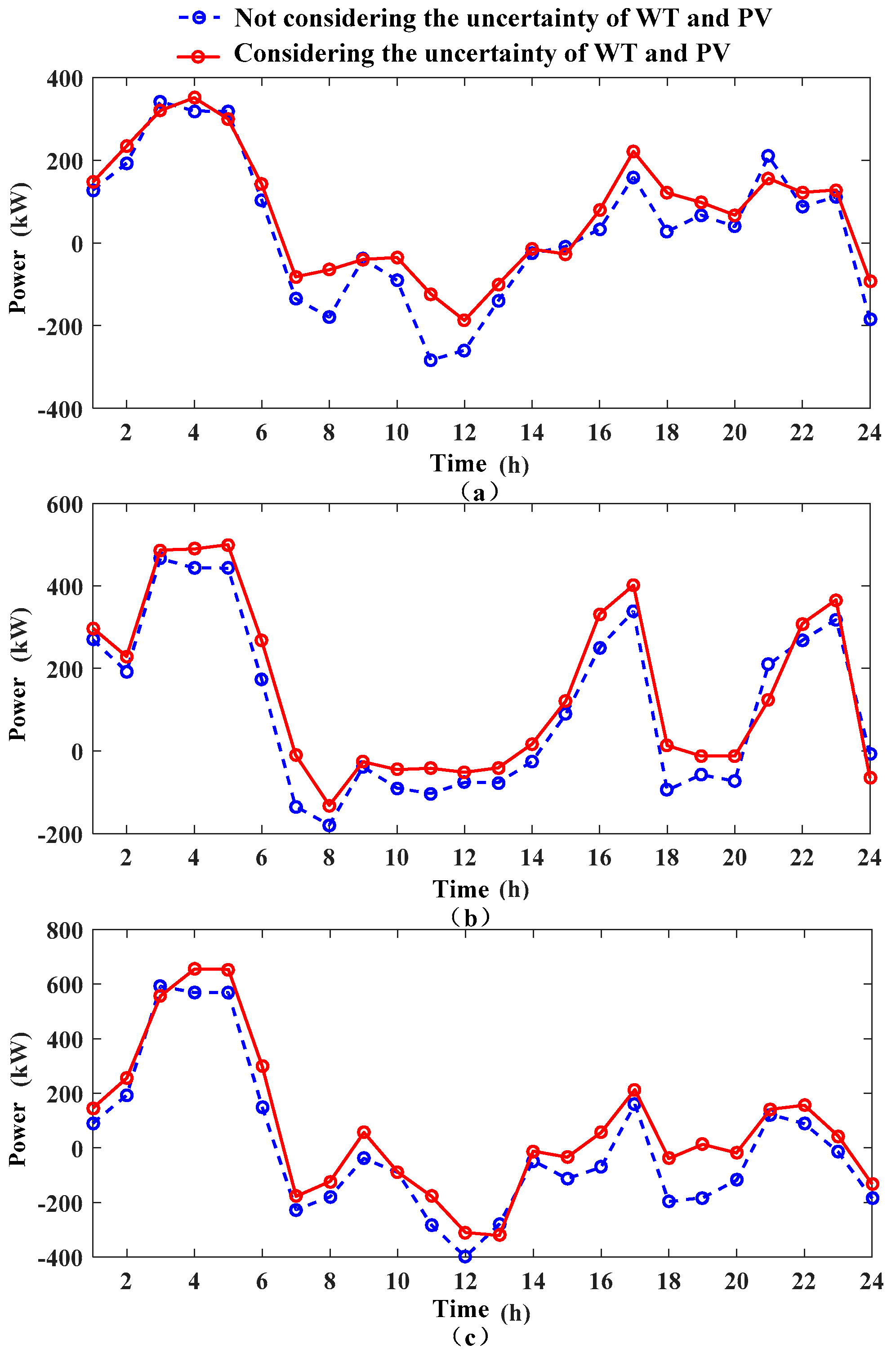
The influence of the traditional day-ahead scheduling method without considering the uncertainty of the PV and wind energy and the two-stage stochastic scheduling method with the uncertainty of the scenery were analyzed. The results were compared as shown in Table 1 and Figure 4. As shown in Table 1, the total operation cost of traditional day-ahead scheduling without considering the stochasticity of scenery is less than that of two-stage stochastic scheduling method. This is because the two-stage stochastic scheduling considers the revision of the day-ahead scheduling plan corresponding to the predicted scenario in the prescheduling by the error scenario in the rescheduling process, which increases the running cost. However, it can ensure that the day-ahead scheduling plan can be smoothly transferred to various error scenarios, that is, two-stage stochastic scheduling can make decisions before uncertainty occurs. Moreover, the decision-making process incorporates the consideration of uncertainties, which can consider whether the optimization problem still has a feasible solution after the uncertainties are realized.
As can be seen in Figure 4, in most scheduling times, VPP purchases more electricity from ADN than without considering the uncertainty of wind and light. The electricity sales to ADN are less than those without considering the uncertainty of wind and light. It shows that the controllable power generation in VPP will be reduced when the uncertainty of wind power is considered, and the electricity purchased from ADN will be increased to cope with the uncertainty of wind and light. That is to say, two-stage stochastic scheduling will sacrifice part of the operating economy to improve the ability to deal with stochastic wind and light, so it has higher operational security. In the two-stage scheduling stage, the scenario of possible errors in the real time operation stage has been considered in the prescheduling stage. By optimizing the adjustable outputs of controllable power supply in the rescheduling stage, any possible wind and light condition in the error condition set can be guaranteed to meet the operation requirements.
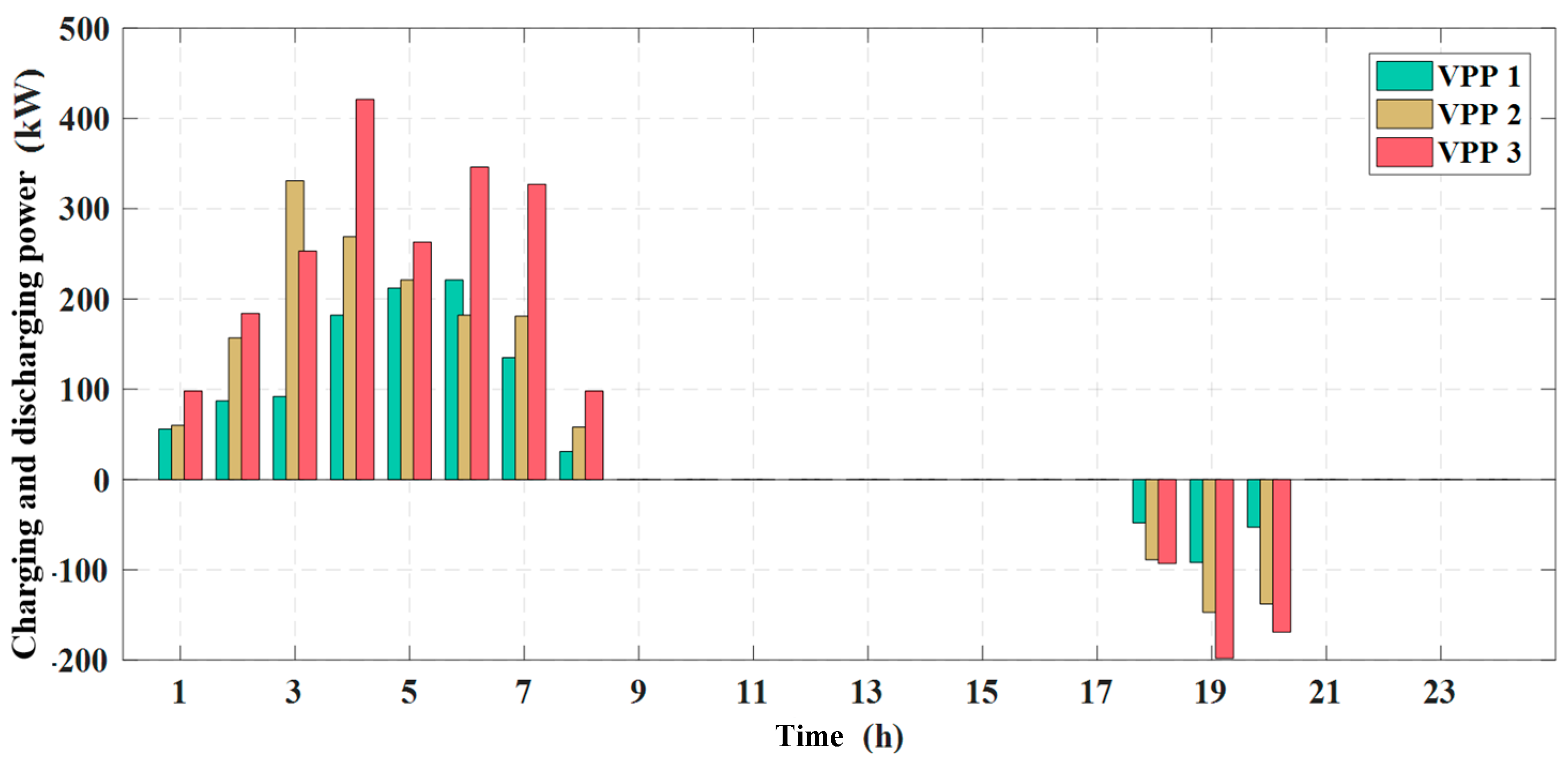
The charging and discharging power of EV intelligent agent is shown in Figure 5. The charging power of EV agents are mainly affected by the electricity price. In the period of low market price, which is also the period of large WT output, each VPP will purchase electricity from ADN to supply load demand while charging EV. When the compensation cost of V2G service provided by VPP is 0.1 $/kW, which means the compensation cost of V2G service is higher than the market price at any time, then EV only participates in the V2G reverse discharge in 18–20 period. Because of the high load in the VPP and ADN, the controllable power supply cannot increase its output due to its output limitation, and the total output of the wind and light in this period is the least time of the day. Therefore, VPP will transfer EV with higher cost of V2G service to reverse discharge, and help meet the higher load requirements in the system and avoid load shedding. In other words, when the discharge loss cost of power battery is high, VPP will not reduce its operation cost because of the V2G reverse discharge of EV. However, with the advancement and development of battery technology, the compensation cost of V2G service provided by VPP will also be reduced when the loss cost of power battery is significantly reduced. Moreover, in the peak load period with high electricity price, the V2G reverse discharge from the EV agent to the VPP will increase, that can reduce the power purchasing from the VPP to the distribution network in the period of high electricity price, and reduce the operation cost of the VPP. In addition, although under the current V2G service compensation cost, EV almost does not carry out V2G reverse discharge but participate in system balance only as a similar reserve resource. However, under the incentive of electricity price policy, the EV charging load during peak load period is transferred to the low load period, which makes full use of the low price during the low load period. It also reduced the high price of VPP in the peak load period, and can effectively reduce the operation cost and load peak–valley difference of VPP and ADN.
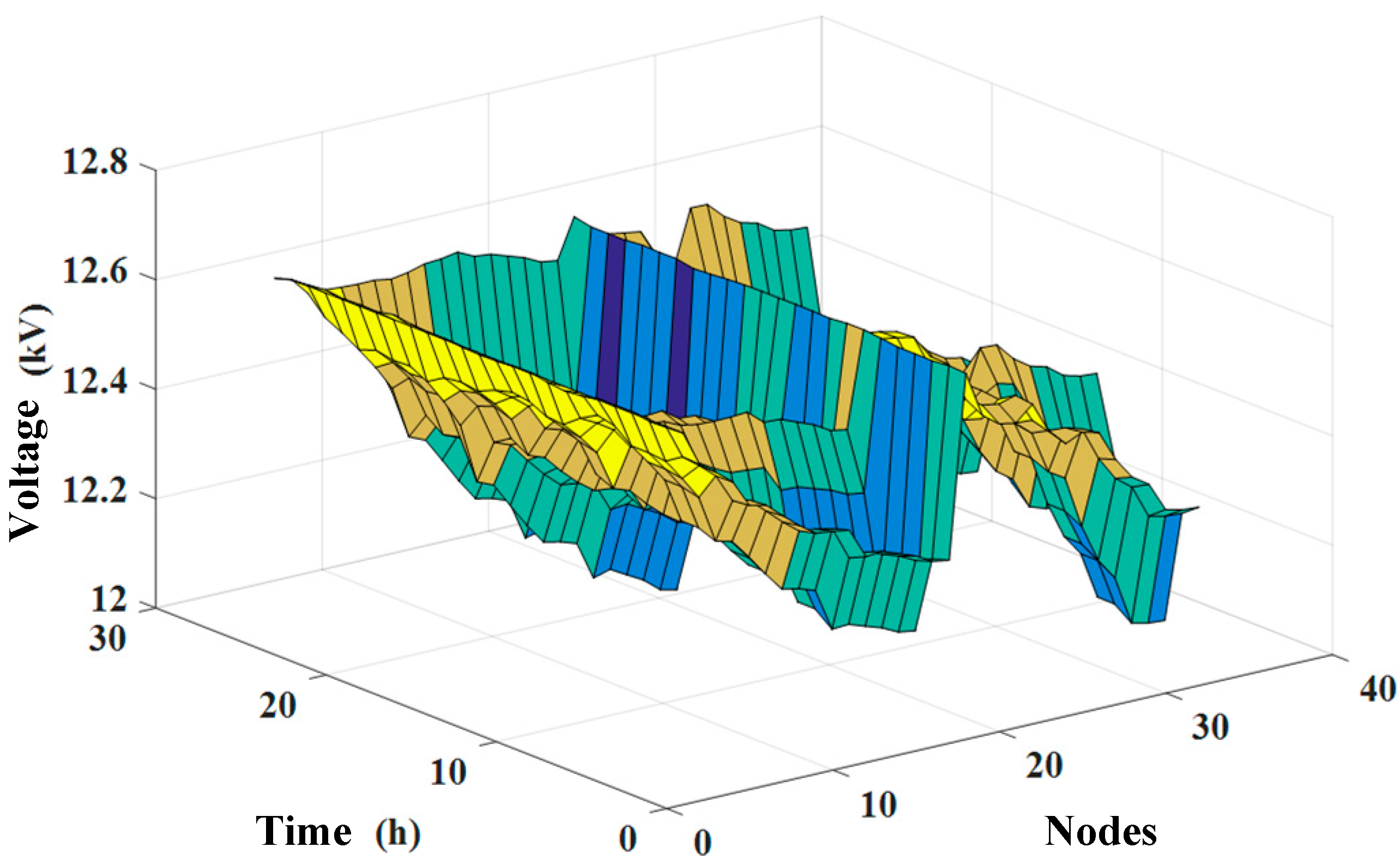
The node voltage level in the ADN area is shown in Figure 6. Since this paper supposed that node 2 is the reference node, the voltage of node 2 remains at 12.66 kV. When the regional load level is relatively low, the node voltage is on the high side, which will make the voltage difference of the network larger. However, the voltage level of each node is kept in the safe operation range of (0.95, 1.05) p.u., so that the whole system can operate safely.
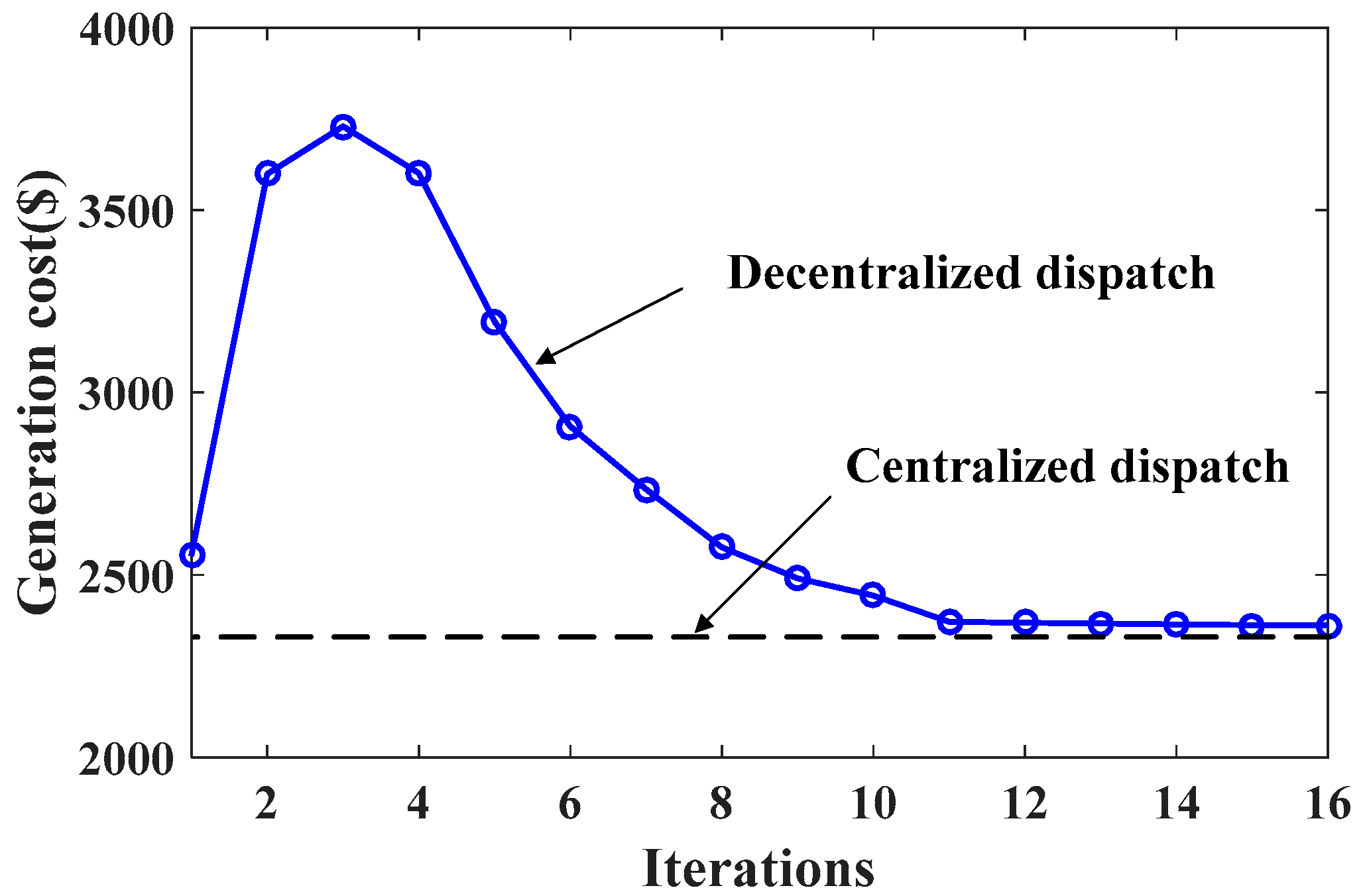
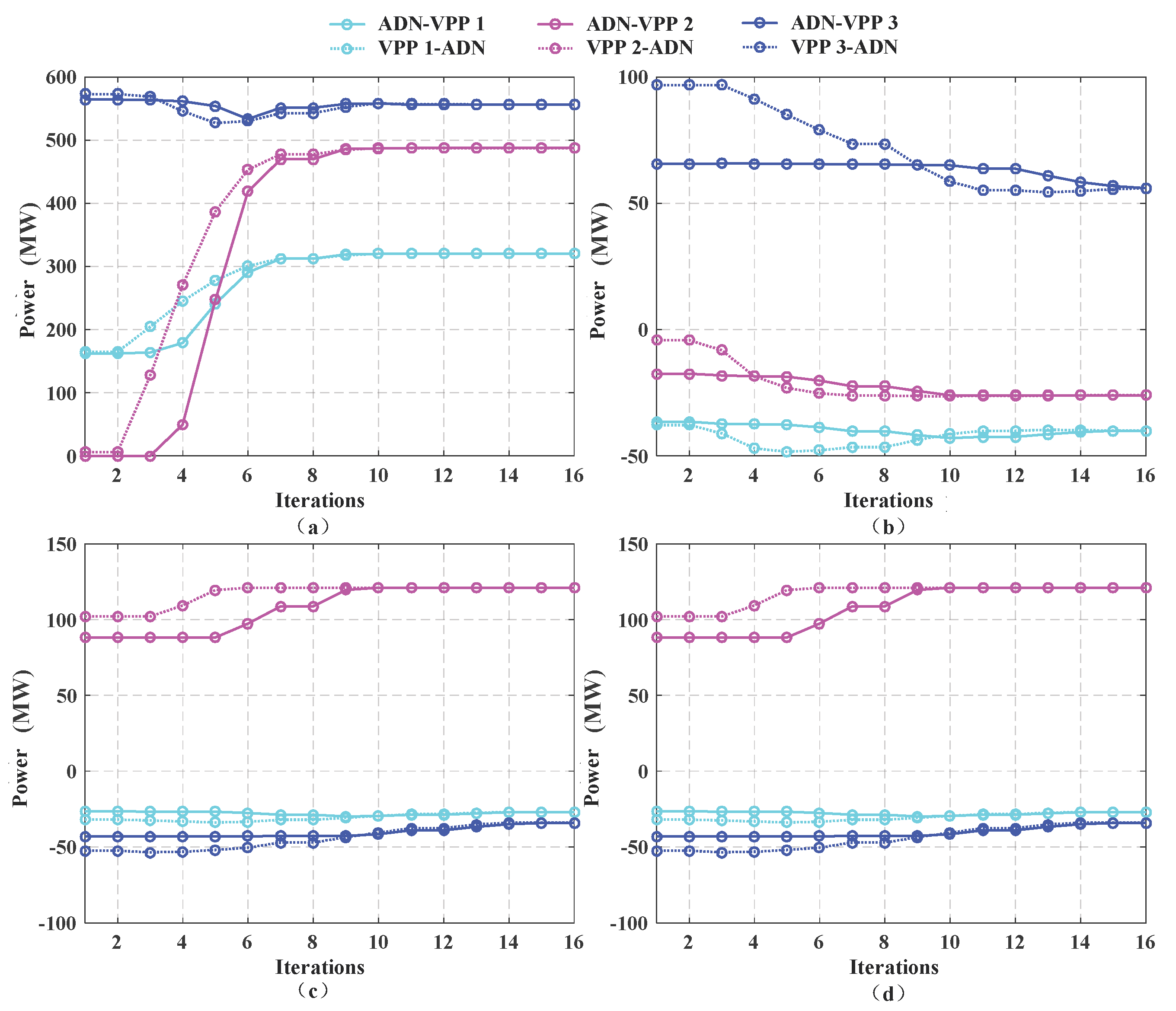
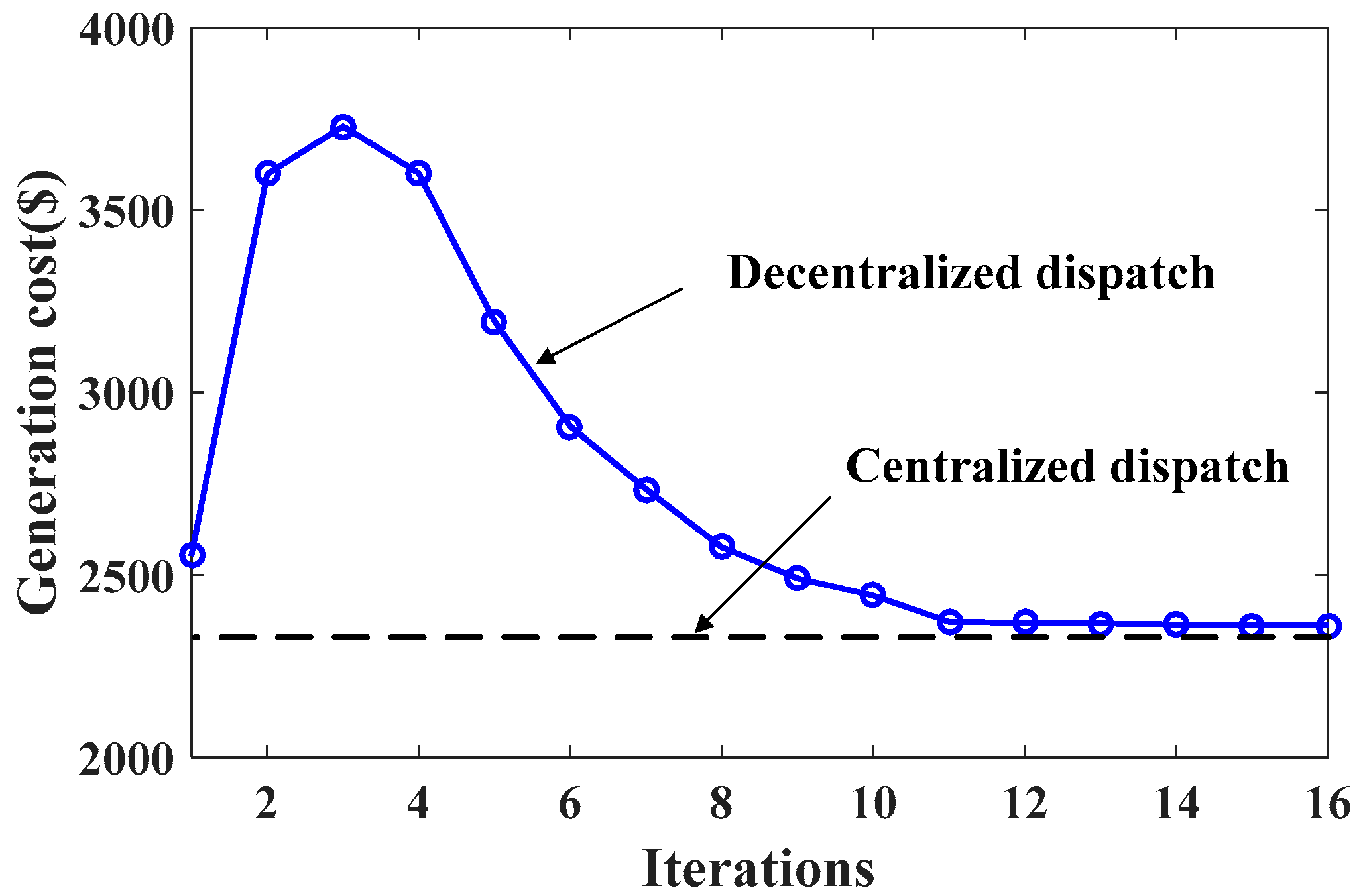
Taking the typical time periods 3, 9, 15, and 20 as examples, the convergence performance of the dispatching method that proposed in this paper was analyzed. Active power interaction between ADN and VPP converged after 16 iterations, as shown in Figure 7. The total operation cost of traditional centralized two-stage stochastic scheduling was compared with that of decentralized two-stage stochastic scheduling, as shown in Figure 8. It can be seen that the total operation cost of centralized two-stage stochastic scheduling is 2303$. After 16 iterations, the total cost of decentralized two-stage stochastic scheduling converges to 2361$. This shows that the calculation effect of decentralized two-stage stochastic optimization based on ADMM is very close to centralized optimization and can converge after finite iterations.
In order to verify the effectiveness of the decentralized two-stage stochastic optimization model for active distribution systems with multi-virtual power plants proposed in this paper, the following four comparison situations are set up.
Case 1: Without considering the stochastic uncertainty of distributed wind and light power output, the traditional centralized scheduling method is used to solve the problem.
Case 2: Considering the stochastic uncertainty of distributed wind and light power output, the traditional centralized scheduling method is used to solve the problem.
Case 3: Regardless of the stochastic uncertainty of distributed wind and light power output, a distributed scheduling method based on ADMM is adopted to solve the problem.
Case 4: Considering the stochastic uncertainties of distributed wind and light power output, a distributed scheduling method based on ADMM is adopted to solve the problem, i.e., the two-stage stochastic optimization method proposed in this paper.
The results of the four cases are shown in Table 2.
For centralized and decentralized optimization results, the total cost of case 3 is only 49 $ more than case 1, and the total cost of case 4 is only 58 $ more than case 2. It shows that the results of decentralized optimization are very close to those of centralized optimization, that is, the decentralized optimization in this paper can converge to the global optimal solution after finite iterations. The computation time of case 3 and case 4 is larger than case 1 and case 2. However, it needs to be pointed out that the model in this paper is to perform computational tasks on a single computer, and the decentralized optimization algorithm is not used to improve the computational speed, but to achieve the scheduling independence of ADN and VPPs, protect the data privacy of each agent, and more suitable for the future power market environment. In addition, when the proposed decentralized optimization method is applied in practice, the generation planning of each dispatching agent will be carried out separately by computers distributed in different geographical locations, and the computing speed advantage of decentralized optimization will gradually be reflected.
For the two-stage stochastic optimization model considering the stochastic uncertainty of distributed wind and light power output and the traditional deterministic model without considering the stochastic uncertainty of wind and light power output, the total cost of case 4 was 1.1% more than case 3, and the total cost of case 2 was 0.7% more than case 1. This showed that the total operating cost of the system was greater than that of the system without considering the stochastic wind and light power output when considering the influence of the stochastic distributed wind and light power output on the power generation plan in the model. The reason was that when considering the stochastic uncertainty of wind power output, the error scenario of the second stage will correct the MT output plan obtained in the first stage, resulting in an increase in total operating costs. In the first stage scheduling, wind and light output scenarios that have been considered in the real-time operation stage have been considered. By optimizing the output adjustment of the second stage micro-gas turbine, it ensured that any possibility in the error situation set can meet the requirements. Then the first day scheduling plan can be transferred to the error situation smoothly. In addition, case 2 and case 4, which considered the randomness of wind power output, were much longer than case 1 and case 3, which did not consider the randomness of wind power output. This is because the situations considering the randomness of wind power include the calculation of 10 error situations, resulting in a significant increase in computing time, and the greater the number of error situations, the higher the computational complexity.
5. Conclusions
This paper presents a decentralized two-stage stochastic dispatching method for active distribution system with multiple VPPs based on the SADMM algorithm. The main bodies of VPPs interact with the upper distribution network by aggregating distributed energy and large-scale EVs within their jurisdiction. Without the participation of the central coordinator, the decentralized optimization was realized on the premise of autonomous energy management of active distribution network and VPPs. Then a two-stage stochastic optimization method including pre-scheduling stage and re-scheduling stage was adopted to deal with the uncertainty of wind and light output, and to reduce its adverse impact on the economic operation of the system. The proposed decentralized optimization method can realize the decentralized autonomy of dispatching agents and has good convergence performance. By aggregating distributed energy sources and EVs in VPPs, the adverse effects of disorderly charging and discharging of EVs and uncertainties of distributed wind and light power output on active distribution network dispatching and operation can be effectively alleviated.
For the next research plan, the following two aspects are mainly carried out:
Firstly, the uncertainties of charging and discharging behavior of EVs were not considered in this paper. With the large-scale network entry of EV, how to effectively deal with the uncertainties of charging and discharging behavior of EV will be of great significance.
Secondly, this paper studied a decentralized day-ahead scheduling method based on synchronous alternating direction multiplier method. How to enhance the convergence performance and computing speed of the algorithm as much as possible and further apply it to real-time operation conditions of power systems will become the future research direction.
Author Contributions
Conceptualization, X.L. and D.Z.; methodology, X.L.; software, X.L.; validation, X.L., D.Z. and B.G.; formal analysis, X.L.; investigation, X.L.; resources, X.L.; data curation, X.L.; writing—original draft preparation, X.L.; writing—review and editing, B.G.; visualization, X.L.; supervision, D.Z.; project administration, D.Z.; funding acquisition, D.Z., corresponding author, B.G.
Funding
This research was funded by Fundamental Research Funds for the Central Universities, grant number 2017XS019 and National Key Research and Development Program Funded Projects, grant number 2017YFB0902600.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Wei, Z.; Yu, S.; Sun, G.; Sun, Y.; Yuan, Y.; Wang, D. Concept and development of virtual power plant. Autom. Electr. Power Syst. 2013, 37, 1–9. [Google Scholar]
- Wang, Y.; Zhao, S.; Xu, Y.; Yin, J. Rolling dispatch of wind/thermal/storage system based on chance constrained goal programming. Power Syst. Technol. 2017, 41, 187–194. [Google Scholar]
- Gao, H.; Liu, J.; Wei, Z.; Cao, Y.; Wang, W.; Huang, S. A security-constrainted dispatching model for wind generation units based on extreme scenario set optimization. Power Syst. Technol. 2013, 37, 1590–1595. [Google Scholar]
- Qiu, H.; Zhao, B.; Gu, W.; Bo, R. Bi-level two-stage robust optimal scheduling for AC/DC hybrid multi-microgrids. IEEE Trans. Smart Grid 2018, 9, 5455–5466. [Google Scholar] [CrossRef]
- Gan, L.; Li, N.; Topcu, U. Exact convex relaxation of optimal power flow in radial networks. IEEE Trans. Autom. Control 2015, 60, 72–87. [Google Scholar] [CrossRef]
- Liu, Y.; Wu, W.; Zhang, B.; Li, Z.; Li, Z. A mixed integer second-order cone programming based active and reactive power coordinated multi-period optimization for active distribution network. Proc. CSEE 2014, 34, 2575–2583. [Google Scholar]
- Li, Q.; Ayyanar, R.; Vittal, V. Convex optimization for DES planning and operation in radial distribution systems with high penetration of photovoltaic resources. IEEE Trans. Sustain. Energy 2016, 7, 985–995. [Google Scholar] [CrossRef]
- Bahrami, S.; Therrien, F.; Wong, V.W.; Jatskevich, J. Semidefinite Relaxation of Optimal Power Flow for AC–DC Grids. IEEE Trans. Power Syst. 2017, 32, 289–304. [Google Scholar] [CrossRef]
- Dong, W.; Wang, Q.; Yang, L. A coordinated dispatching model for a distribution utility and virtual power plants with wind/photovoltaic/hydro generators. Autom. Electr. Power Syst. 2015, 39, 75–81. [Google Scholar]
- Pandzic, H.; Kuzle, I.; Capuder, T. Virtual power plant mid-term dispatch optimization. Appl. Energy 2013, 101, 134–141. [Google Scholar] [CrossRef]
- Zhuang, H.; Wu, H.; Liu, H. Multi-objective economic dispatch of microgrid system considering electric vehicles. Tran. China Electrotech. Soc. 2014, 29 (Suppl. 1), 365–373. [Google Scholar]
- Zhang, Q.; Liu, C.; Zhou, L. A bi-level economy dispatch model considering temporal and spatial optimal distribution of electric vehicles. Autom. Electr. Power Syst. 2014, 38, 40–45. [Google Scholar]
- Huang, Y.; Guo, C.; Wang, L.; Bao, Y.; Dai, S.; Ding, Q. A cluster-based dispatch strategy for electric vehicles considering user satisfaction. Autom. Electr. Power Syst. 2015, 39, 183–191. [Google Scholar]
- Pan, Z.; Zhang, X.; Yu, T.; Wang, D. Hierarchical real-time optimized dispatching for large-scale clusters of electric vehicles. Autom. Electr. Power Syst. 2017, 17, 014. [Google Scholar]
- Yang, J.J.; Zhao, J.H.; Wen, F.S.; Xue, Y.S.; Li, L.; Lv, H.H. Development of bidding strategies for virtual power plants considering uncertain outputs from plug-in electric vehicles and wind generators. Autom. Electr. Power Syst. 2014, 38, 92–102. [Google Scholar]
- Arslan, O.; Karasan, O.E. Cost and emission impacts of virtual power plant formation in plug-in hybrid electric vehicle penetrated networks. Energy 2013, 60, 116–124. [Google Scholar] [CrossRef] [Green Version]
- Shaaban, M.F.; Eajal, A.A.; El-Saadany, E.F. Coordinated charging of plug-in hybrid electric vehicles in smart hybrid AC/DC distribution systems. Renew. Energy 2015, 82, 92–99. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, B.; Wang, J.; Begovic, M.M.; Chen, C. Coordinated energy management of networked microgrids in distribution systems. IEEE Trans. Smart Grid 2015, 6, 45–53. [Google Scholar] [CrossRef]
- Zhao, W.; Liu, M.; Zhu, J. A bi-level decomposition and coordination economic dispatch method for power plants/network considering stochastic wind generation. Power Syst. Technol. 2015, 39, 1847–1854. [Google Scholar]
- Zhou, M.; Wang, M.; Li, J.; Li, G. Multi-area generation-reserve joint dispatch approach considering wind power cross-regional accommodation. CSEE J. Power Energy Syst. 2017, 3, 74–83. [Google Scholar] [CrossRef]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed optimization and statistical learning via the alternating direction method of multipliers. Found. Trends Mach. Learn. 2010, 3, 1–122. [Google Scholar] [CrossRef]
- Zhang, Y.; Giannakis, G.B. Efficient decentralized economic dispatch for microgrids with wind power integration. In Proceedings of the Sixth Annual IEEE Green Technologies Conference, Corpus Christi, TX, USA, 3–4 April 2014. [Google Scholar]
- Peijie, L.; Yong, L.; Xiaoqing, B.; Hua, W. Decentralized optimization for dynamic economic dispatch based on alternating direction method of multipliers. Proc. CSEE 2015, 35, 2428–2435. [Google Scholar]
- Erseghe, T. Distributed optimal power flow using ADMM. IEEE Trans. Power Syst. 2014, 29, 2370–2380. [Google Scholar] [CrossRef]
- Zhang, C.; Xu, Y.; Dong, Z.Y.; Wong, K.P. Robust coordination of distributed generation and price-based demand response in microgrids. IEEE Trans. Smart Grid 2017, 9, 4236–4247. [Google Scholar] [CrossRef]
Figure 1.
Interaction framework of VPPs and ADN.

Figure 2.
Diagram of ADN system with three VPPs.
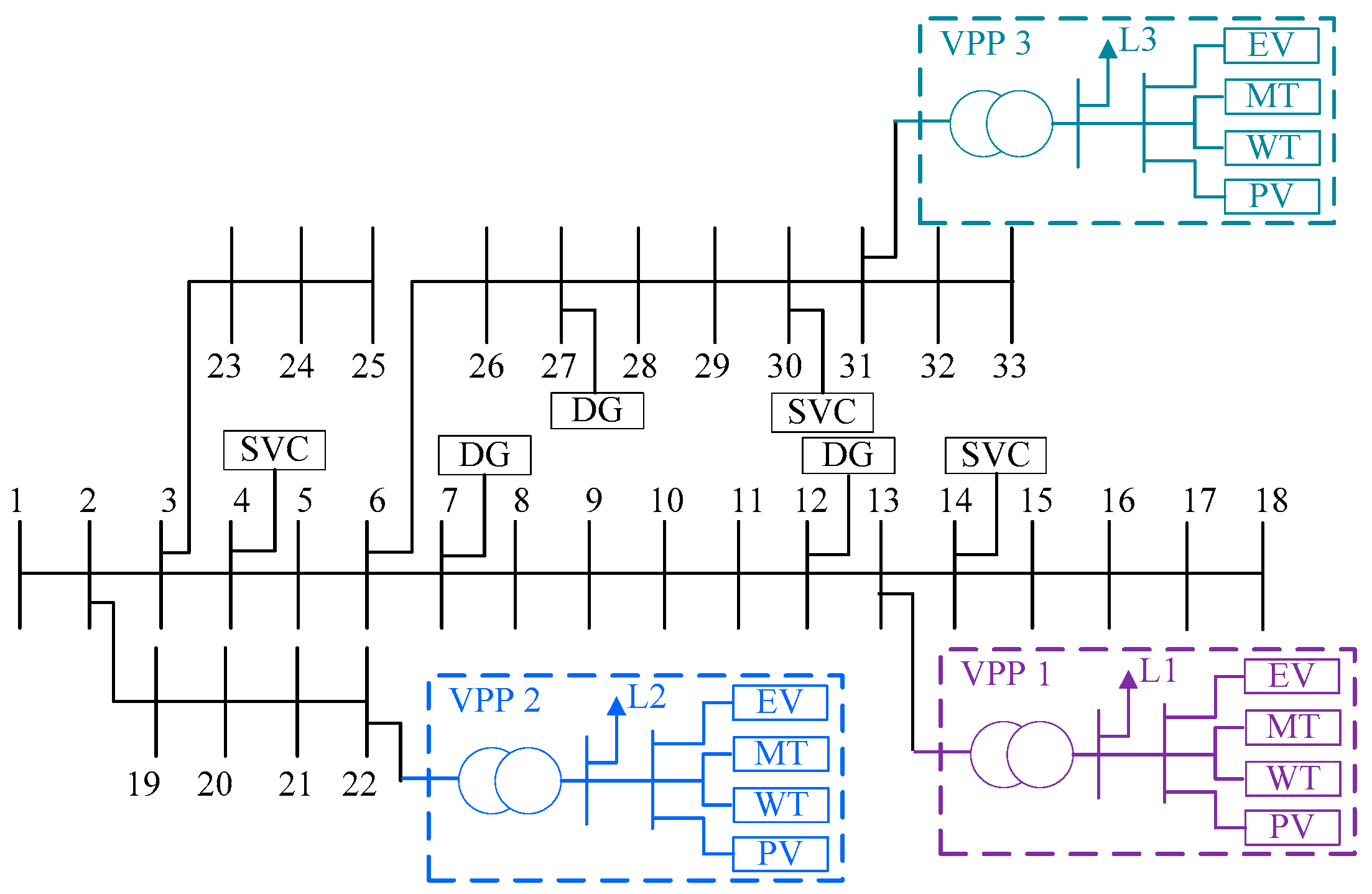
Figure 3.
Output interval and scenarios of WT/PV.

Figure 4.
The interactive active power of the ADN and VPPs (a) VPP 1-ADN; (b) VPP 2-ADN; (c) VPP 3-ADN.
Figure 4.
The interactive active power of the ADN and VPPs (a) VPP 1-ADN; (b) VPP 2-ADN; (c) VPP 3-ADN.
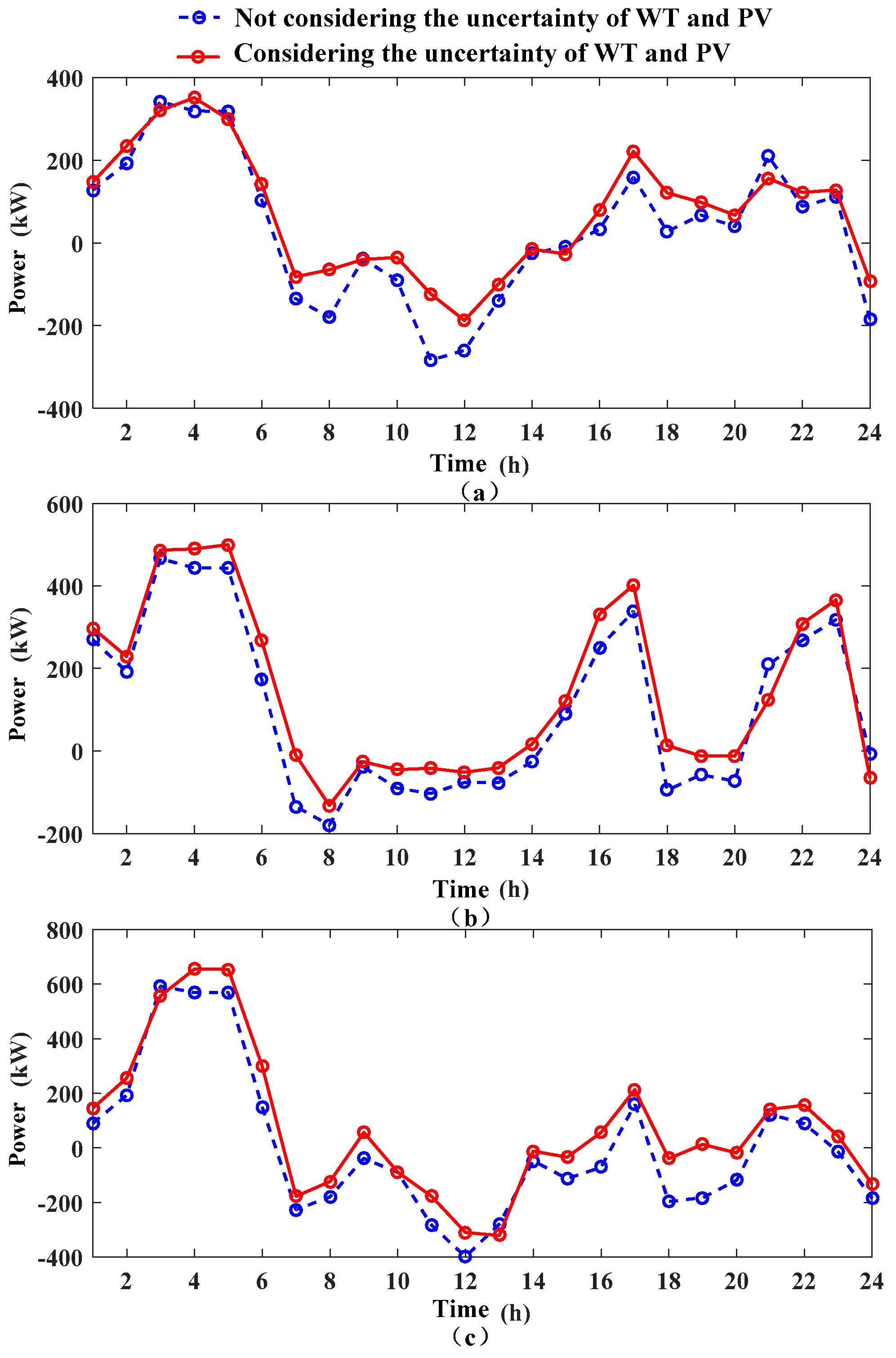
Figure 5.
The charge–discharge power of EV agent.
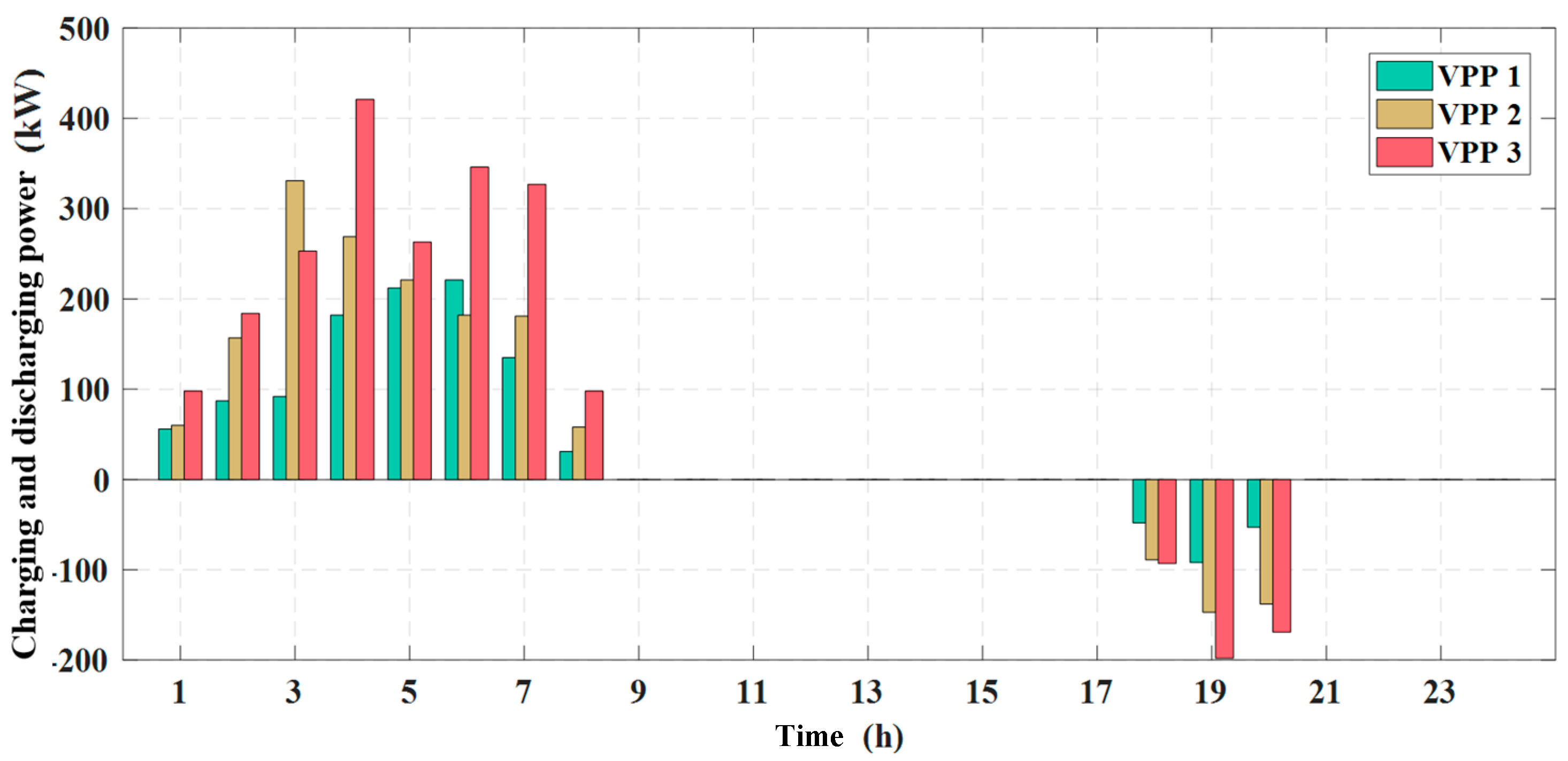
Figure 6.
Node voltage level of AND.

Figure 7.
Iteration curve of active power of ADN and VPPs (a) 3rd period; (b) 9th period; (c) 15th period; (d) 20th period.
Figure 7.
Iteration curve of active power of ADN and VPPs (a) 3rd period; (b) 9th period; (c) 15th period; (d) 20th period.
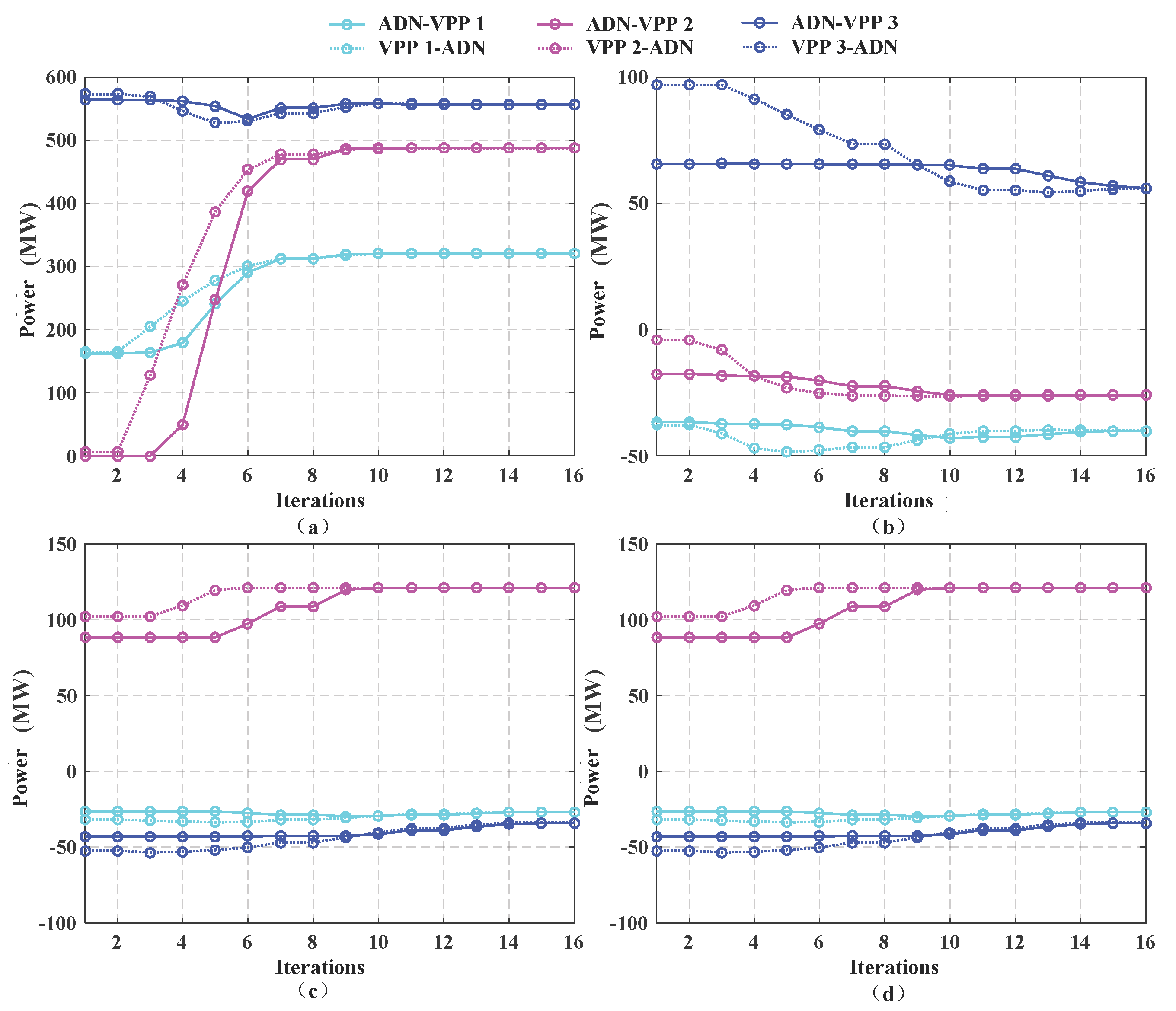
Figure 8.
Convergence of total generation cost.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Impact of different dispatch approaches on the operating costs
| Scheduling Methods | Prescheduling Cost/$ | Rescheduling Cost/$ | Total Cost/$ |
|---|---|---|---|
| Deterministic day ahead scheduling | 2118 | 0 | 2118 |
| Two-stage stochastic scheduling | 2079 | 282 | 2361 |
Table 2.
Comparisons of four typical cases
| Case | Model | Algorithm | Total Generation Cost ($) | Iterations | Calculation Time (s) |
|---|---|---|---|---|---|
| 1 | Deterministic | Centralized | 2287 | 1 | 3.5 |
| 2 | Two-stage stochastic | Centralized | 2303 | 1 | 20.6 |
| 3 | Deterministic | Decentralized | 2336 | 14 | 102.7 |
| 4 | Two-stage stochastic | Decentralized | 2361 | 16 | 192.4 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Li, X.; Zhao, D.; Guo, B. Decentralized and Collaborative Scheduling Approach for Active Distribution Network with Multiple Virtual Power Plants. Energies 2018, 11, 3208. https://doi.org/10.3390/en11113208
AMA Style
Li X, Zhao D, Guo B. Decentralized and Collaborative Scheduling Approach for Active Distribution Network with Multiple Virtual Power Plants. Energies. 2018; 11(11):3208. https://doi.org/10.3390/en11113208
Chicago/Turabian StyleLi, Xiangyu, Dongmei Zhao, and Baicang Guo. 2018. "Decentralized and Collaborative Scheduling Approach for Active Distribution Network with Multiple Virtual Power Plants" Energies 11, no. 11: 3208. https://doi.org/10.3390/en11113208
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.