Parametric Studies for Combined Convective and Conductive Heat Transfer for YASA Axial Flux Permanent Magnet Synchronous Machines


Abstract
:1. Introduction
2. YASA Electromagnetic Models
3. YASA Thermal Models
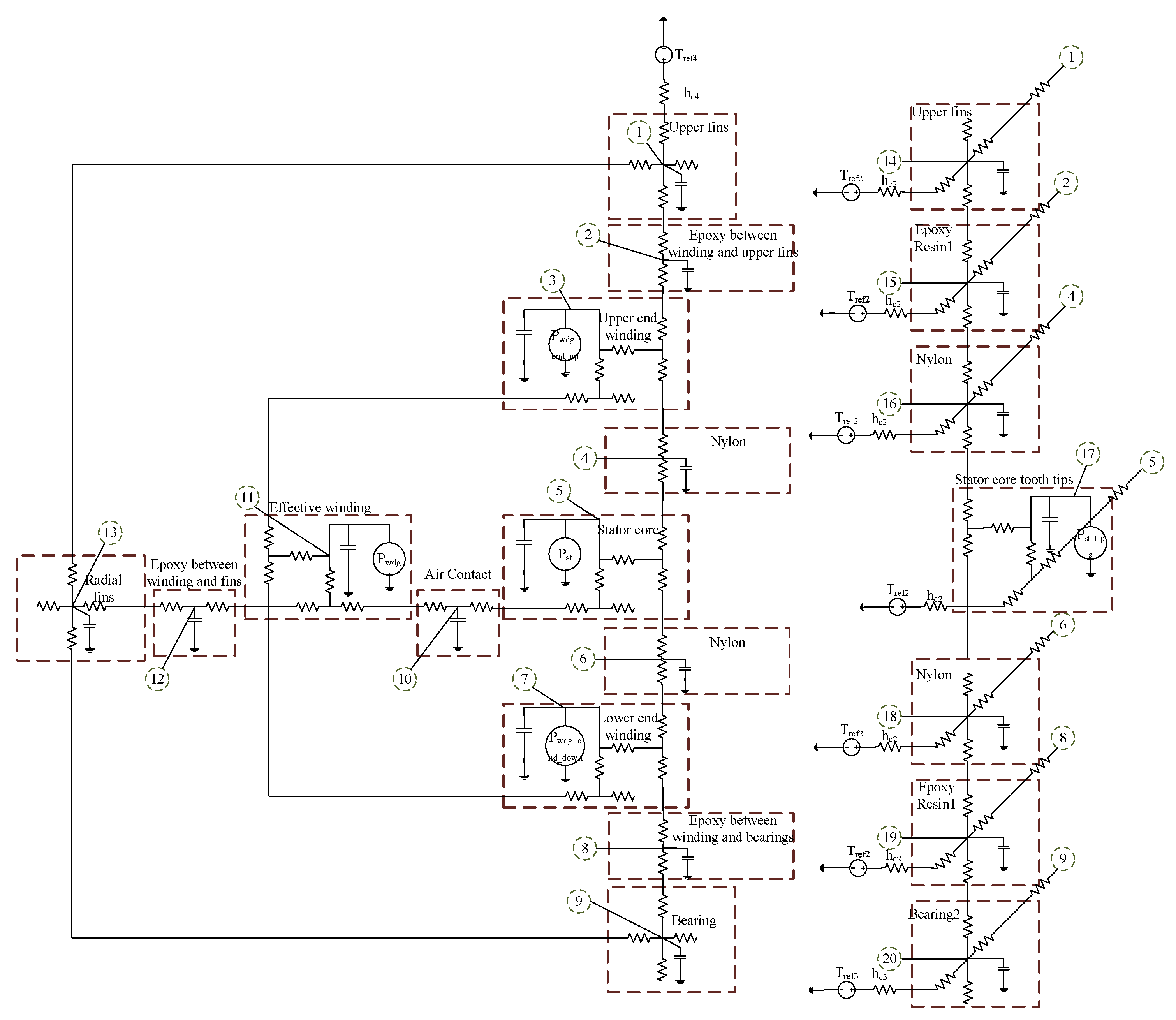
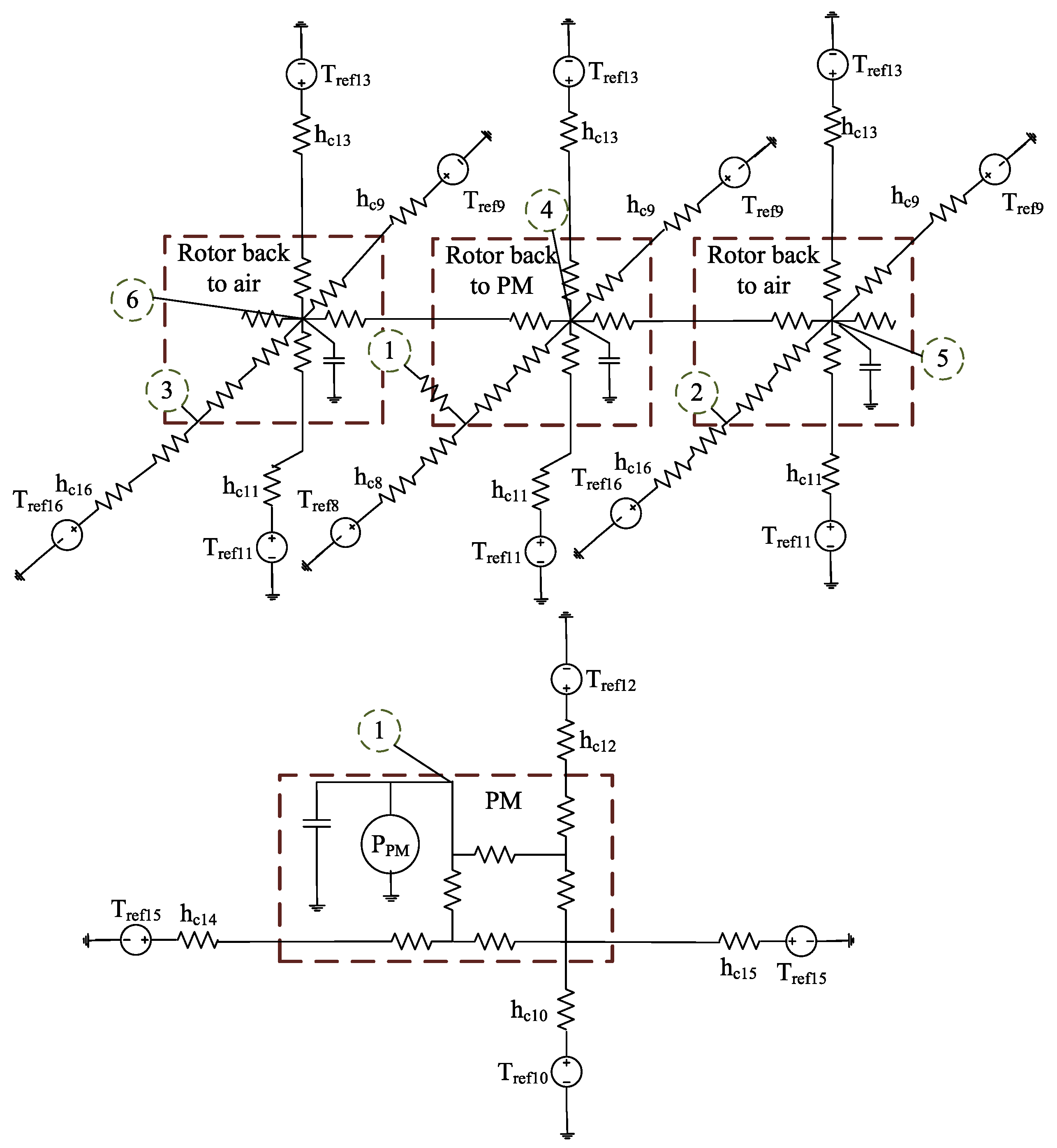
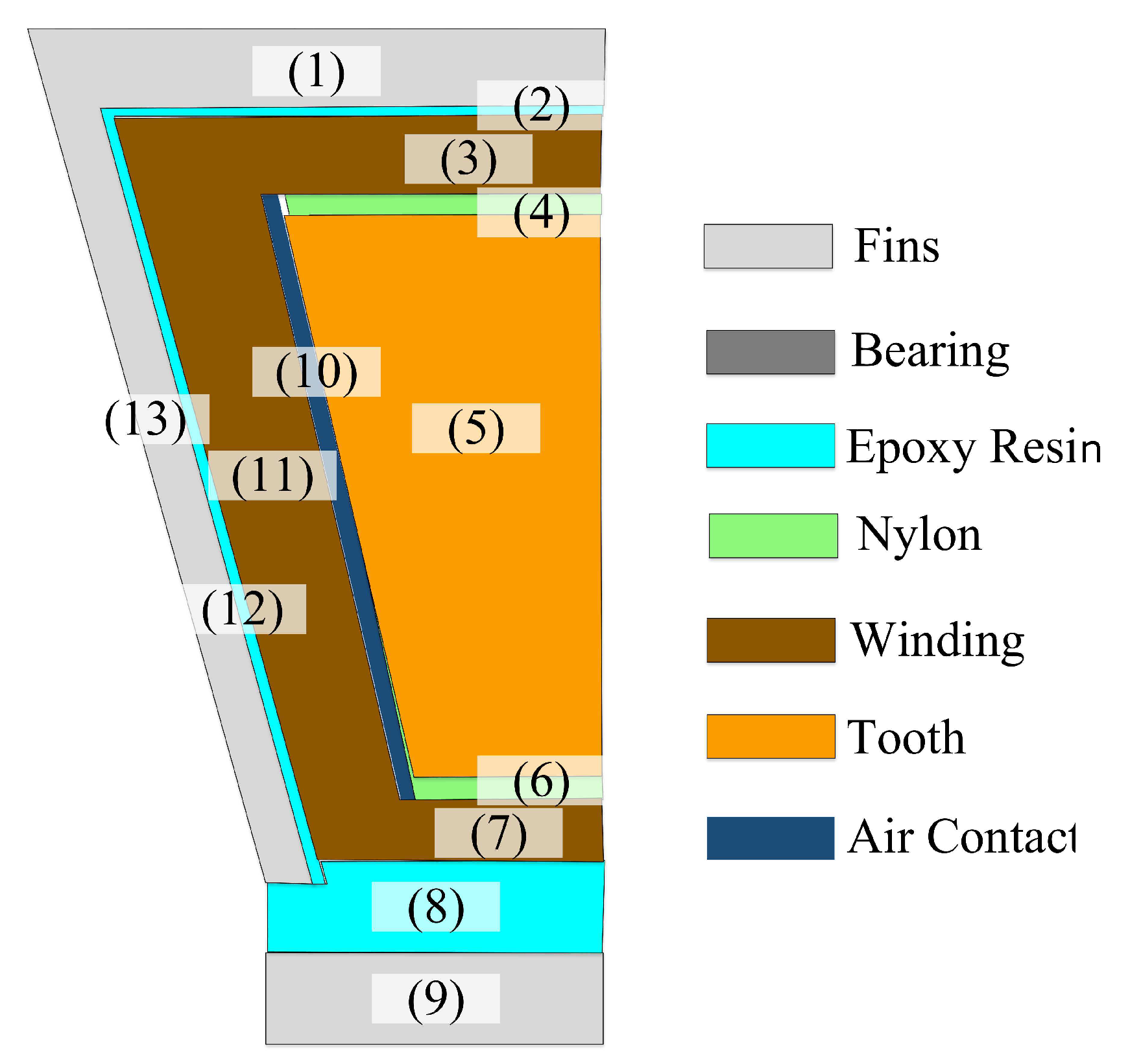
3.1. YASA LPTN
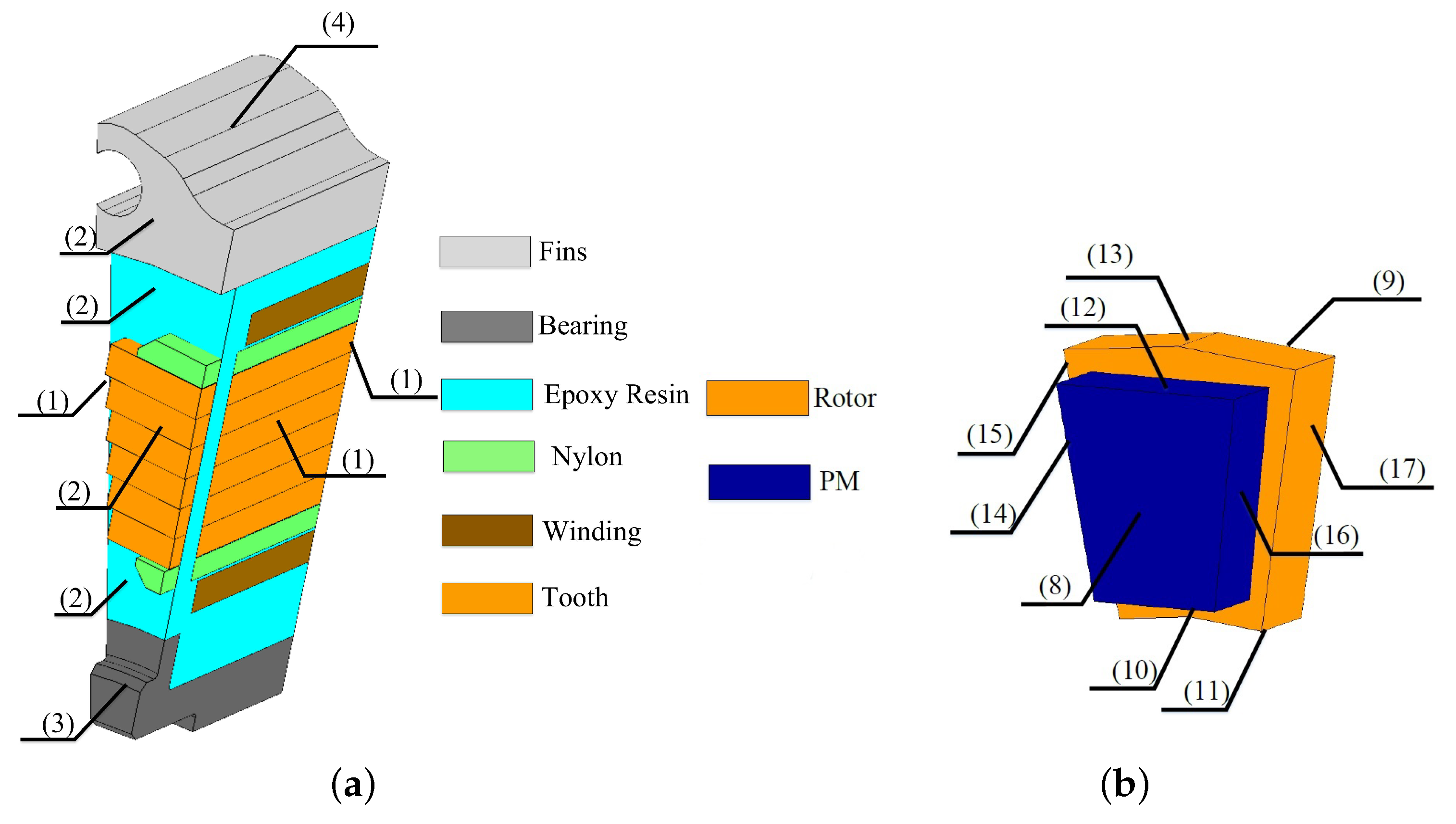
3.2. 3D Thermal FEM Model
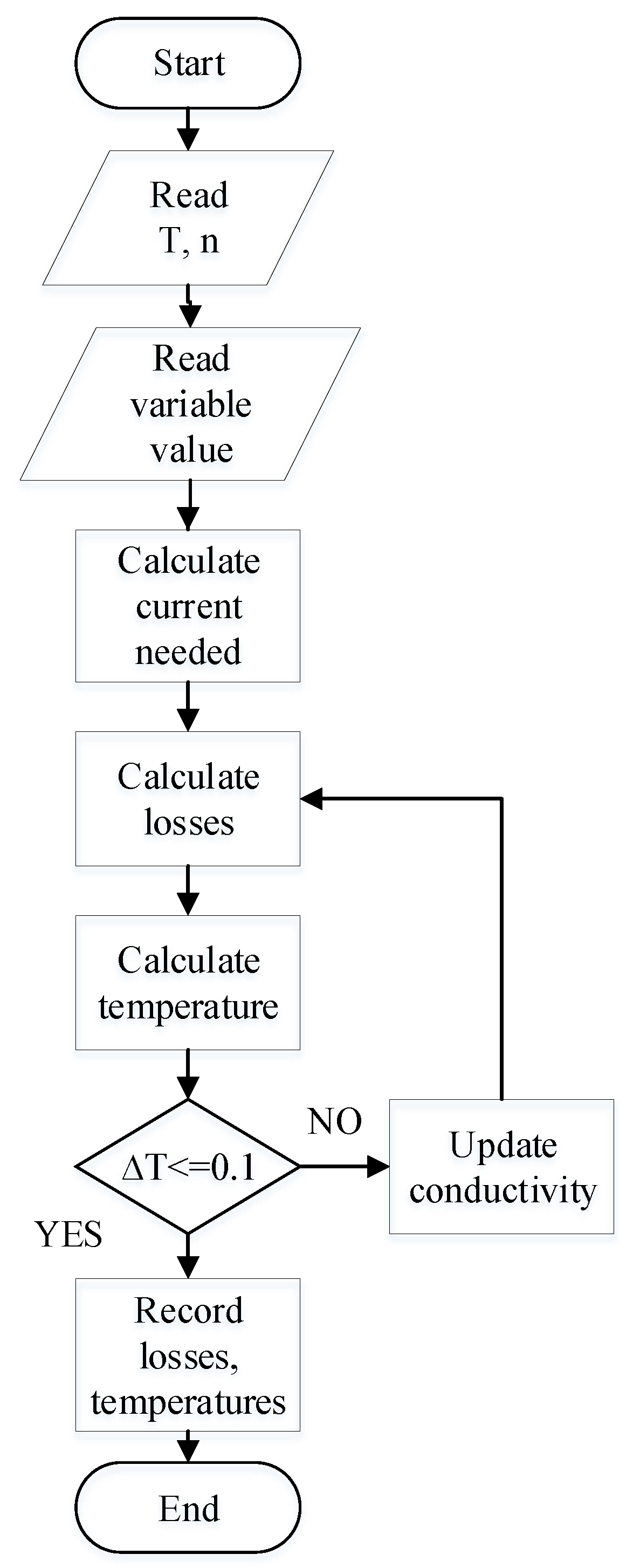
4. Coupled EM-Thermal Study
5. The Parametric Studies
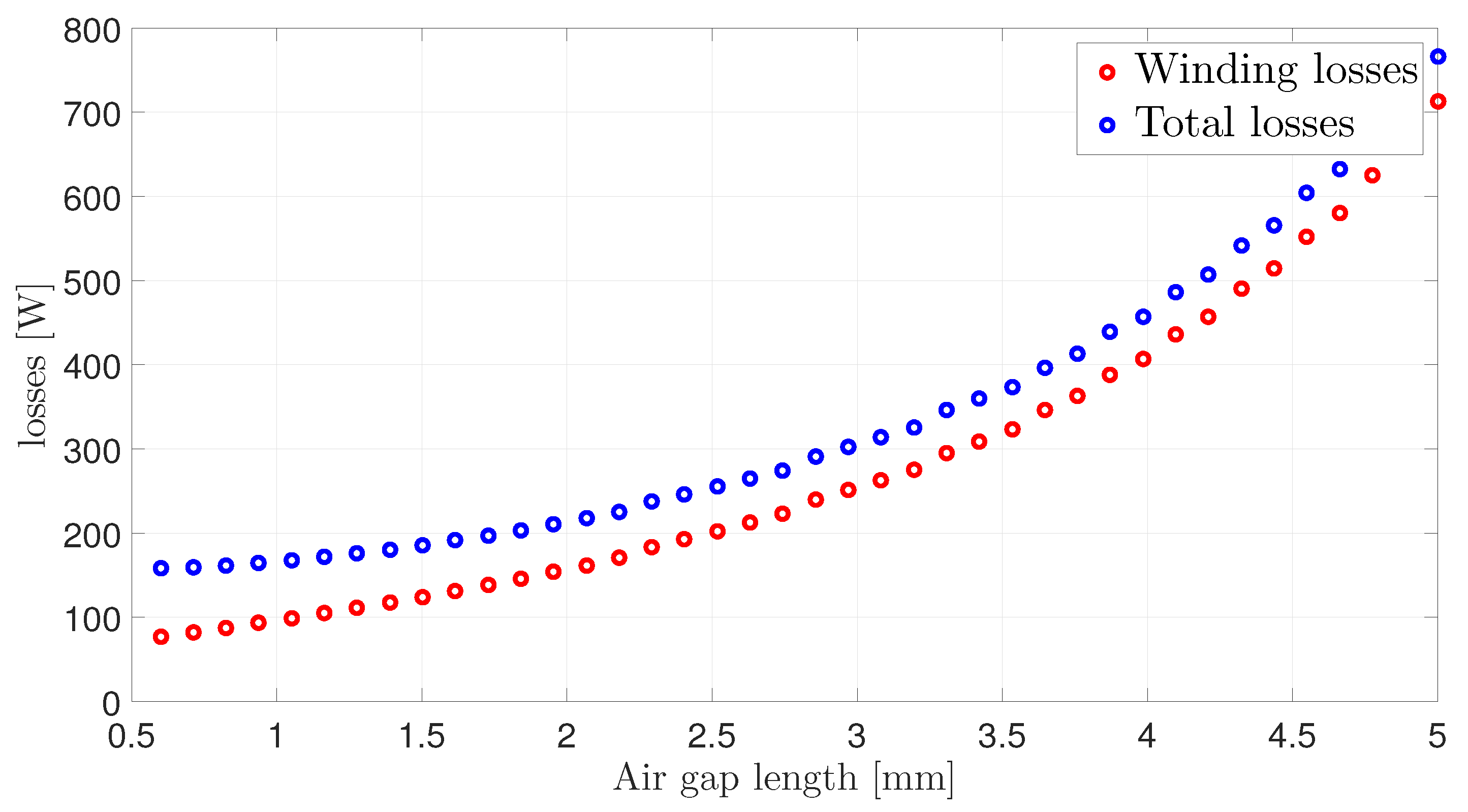
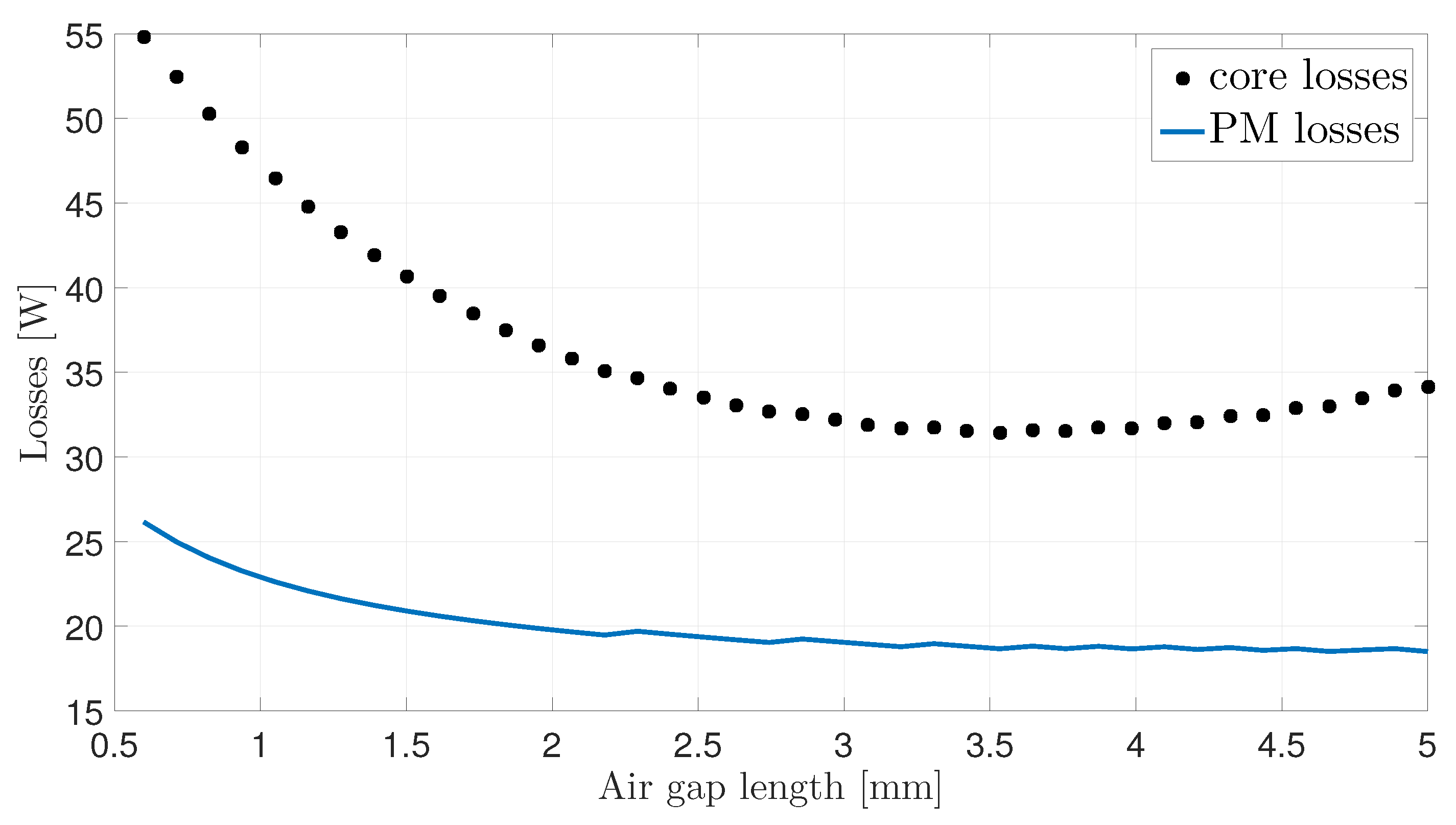
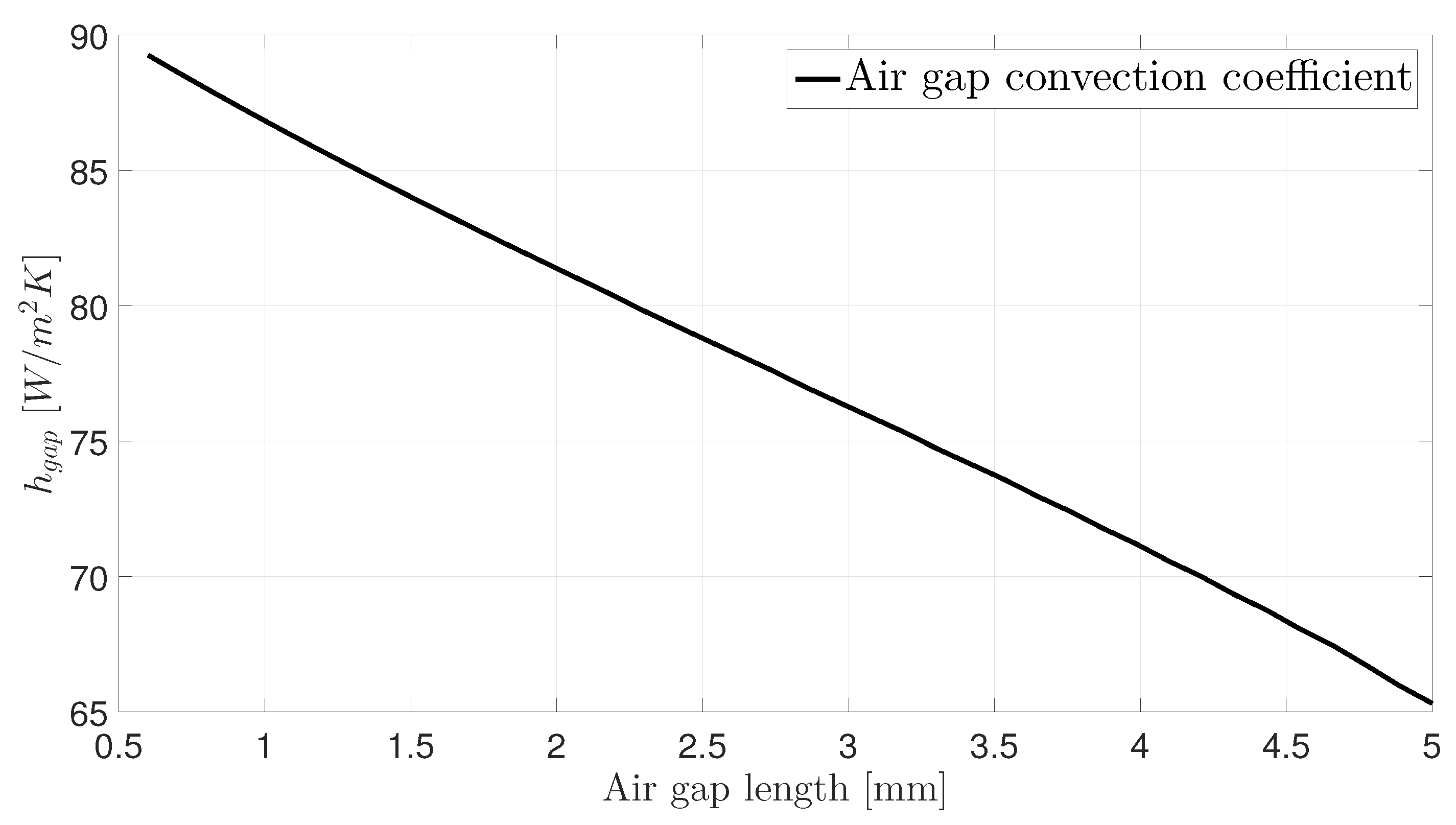
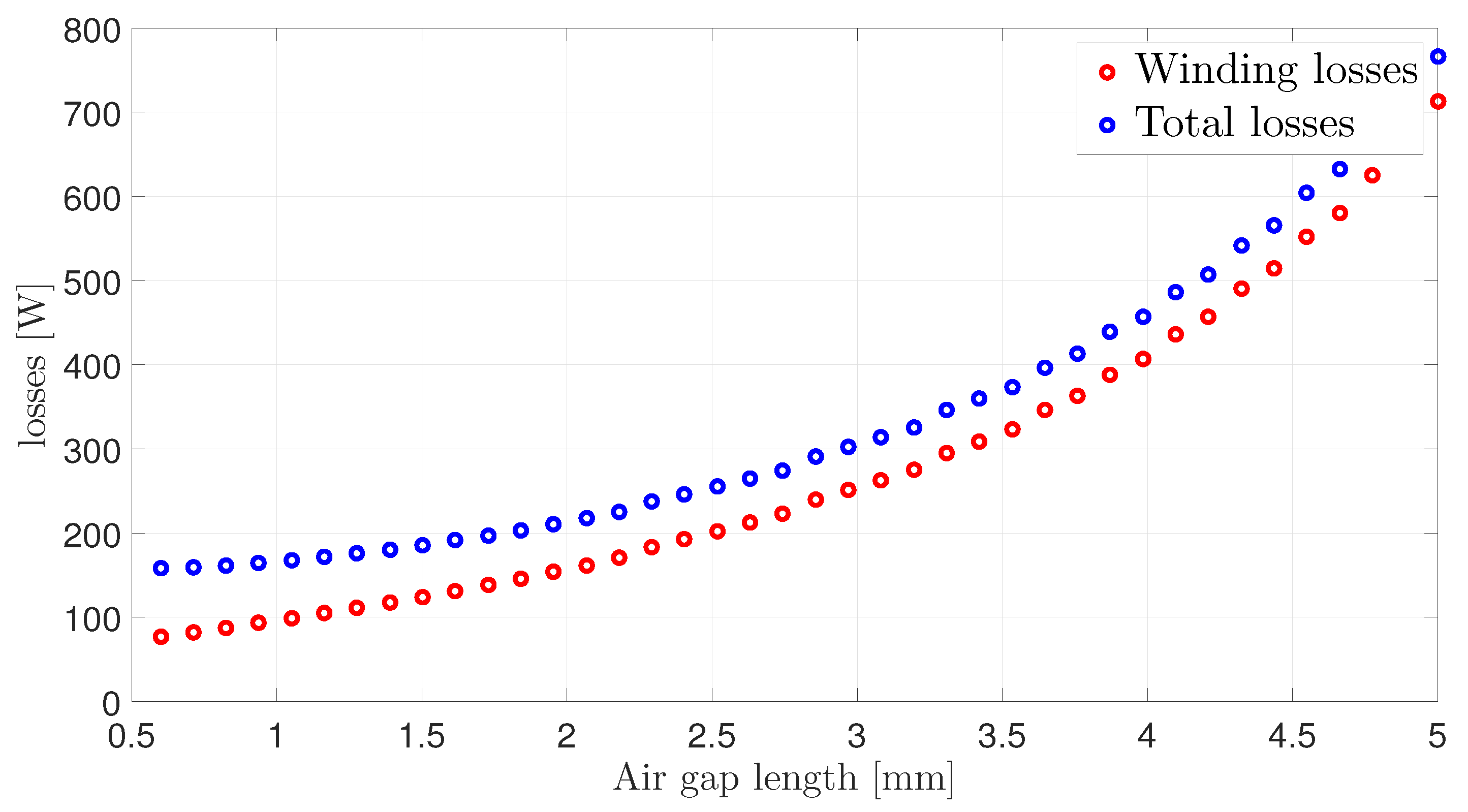
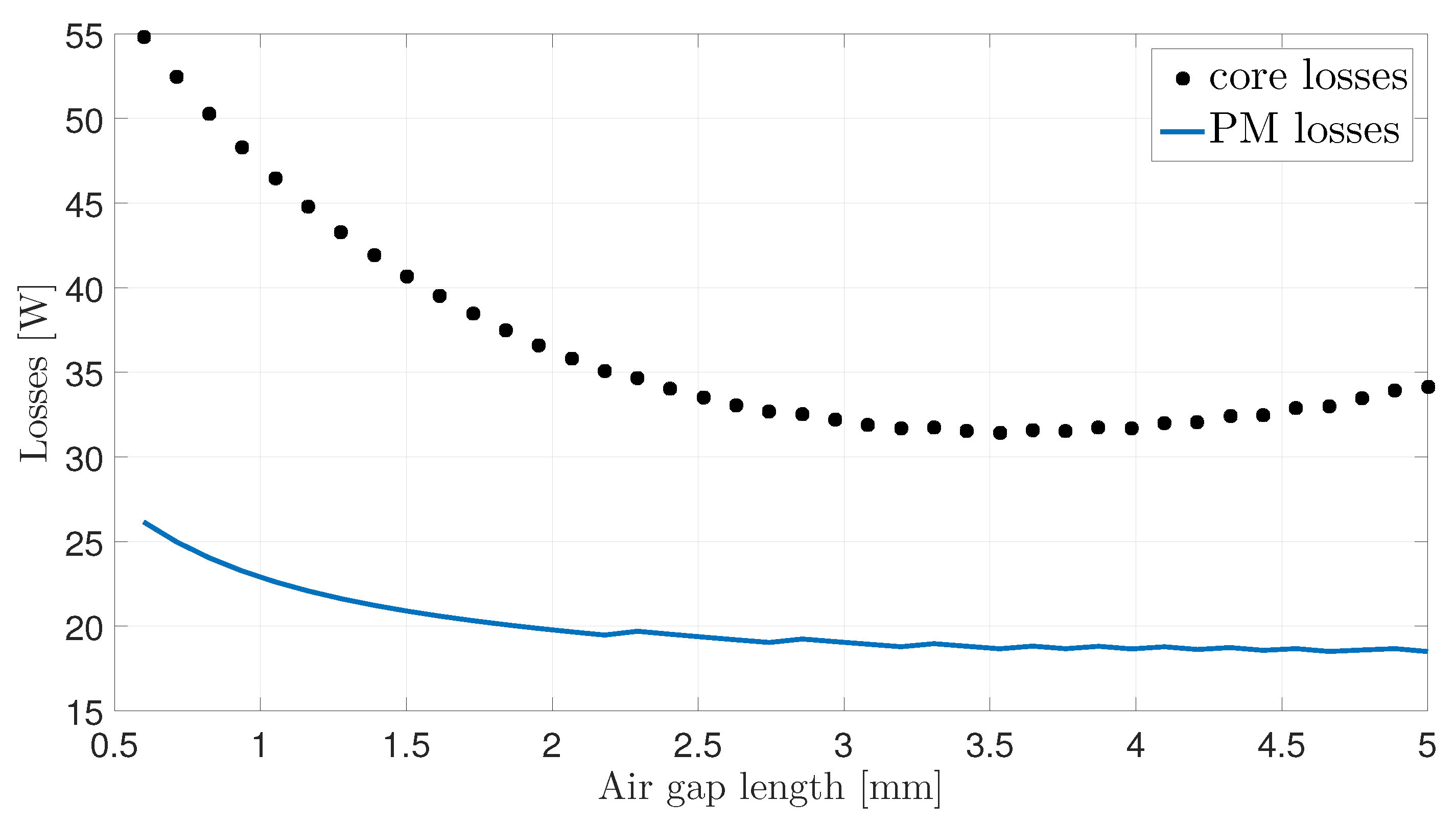
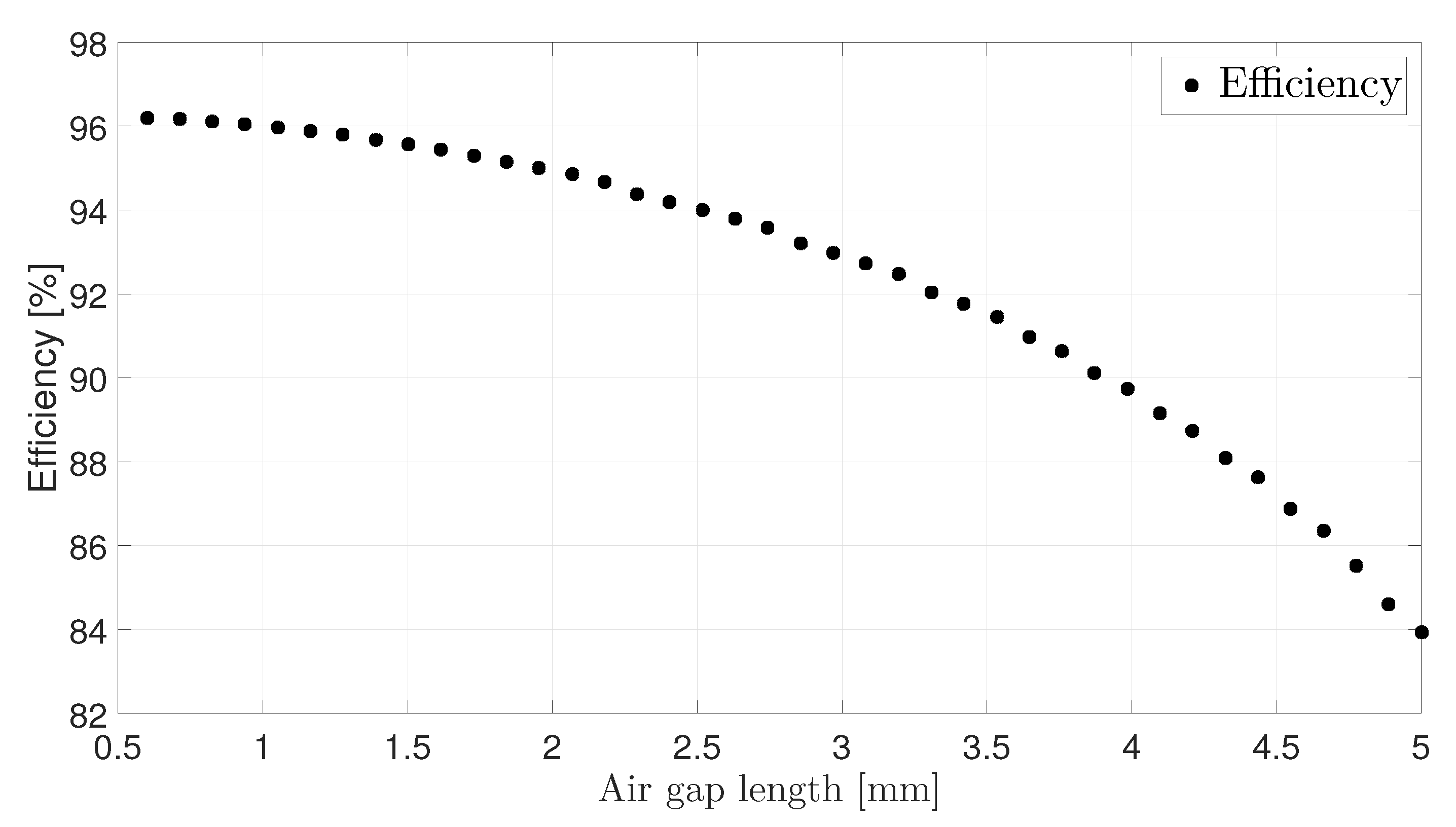
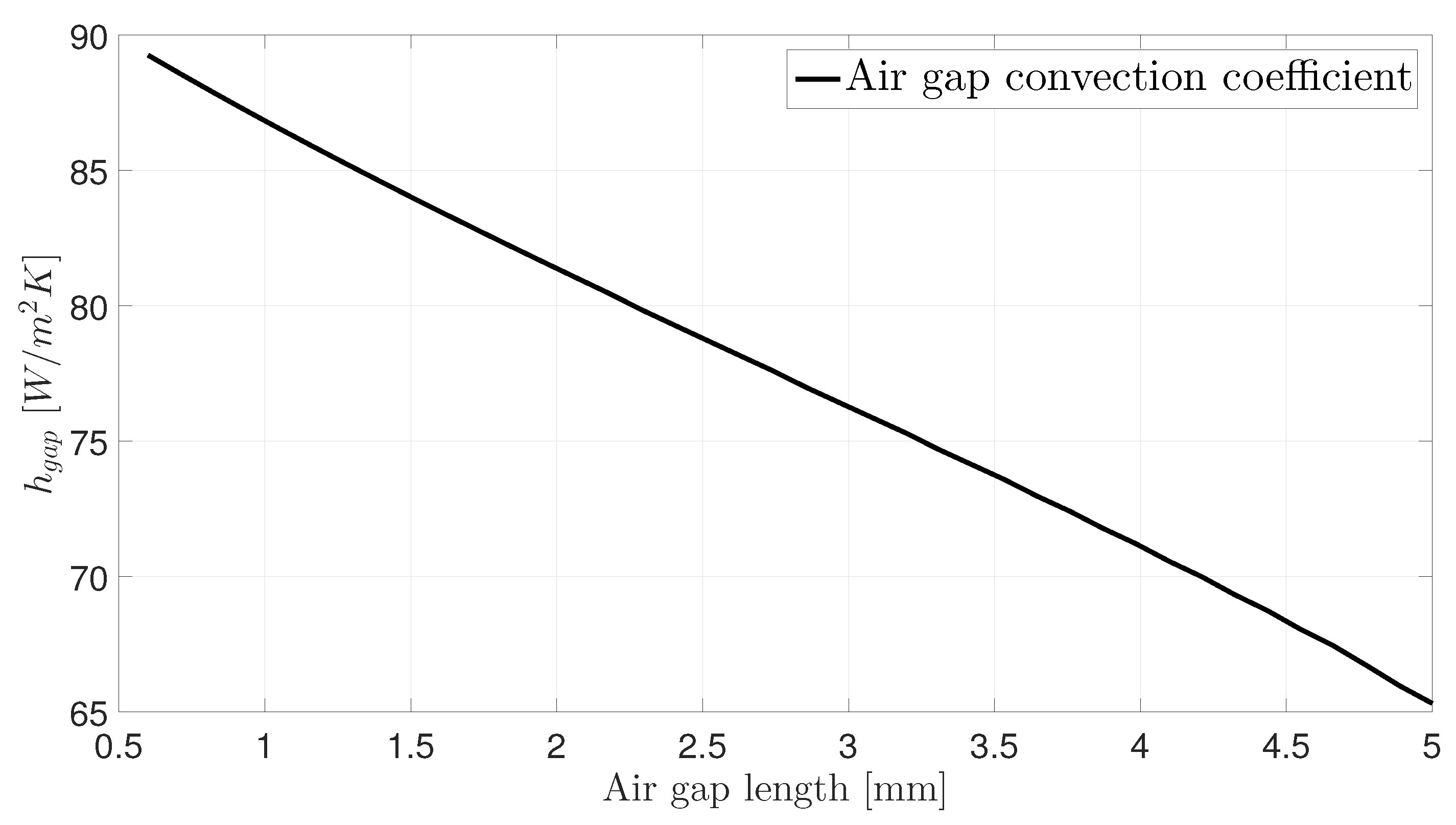
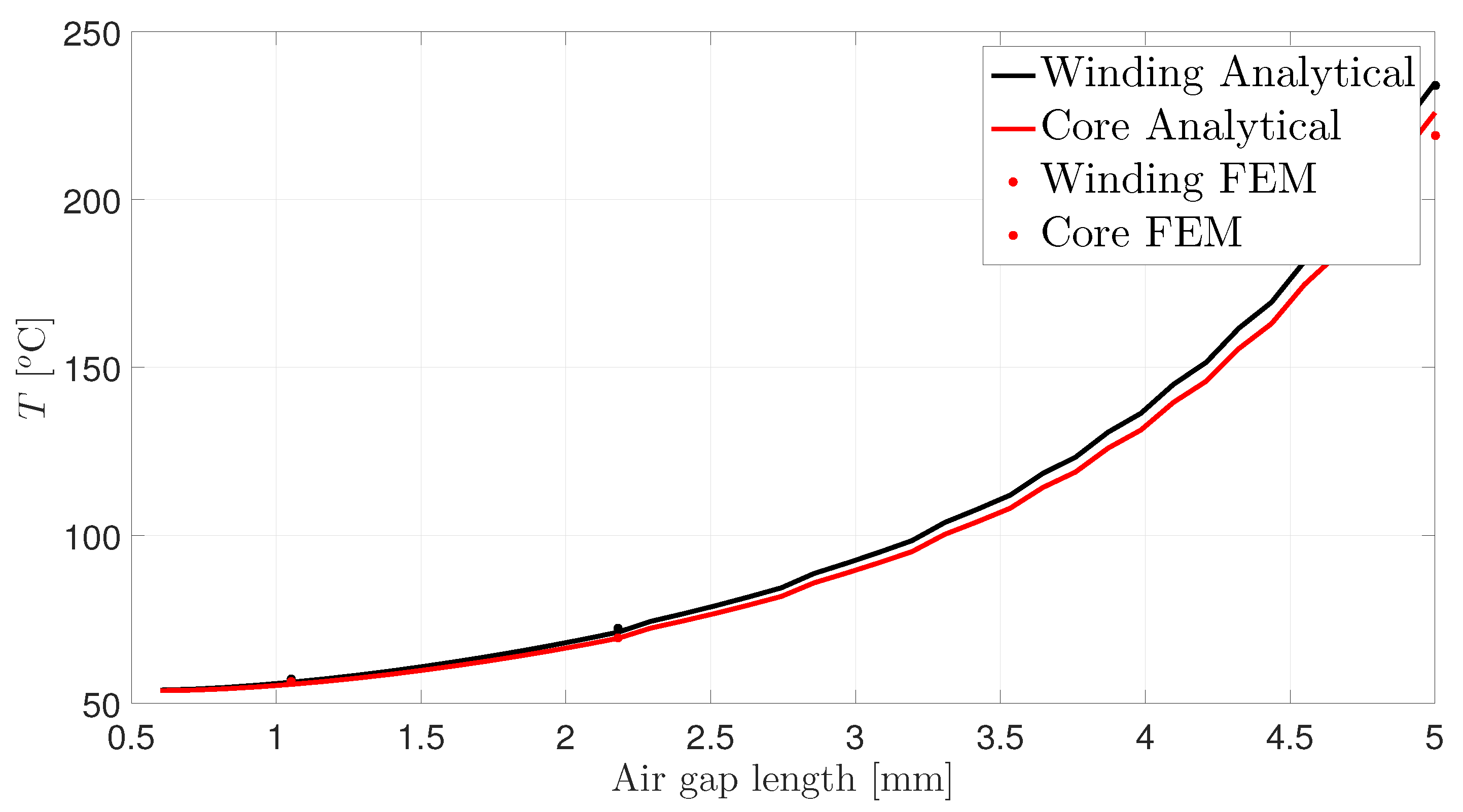
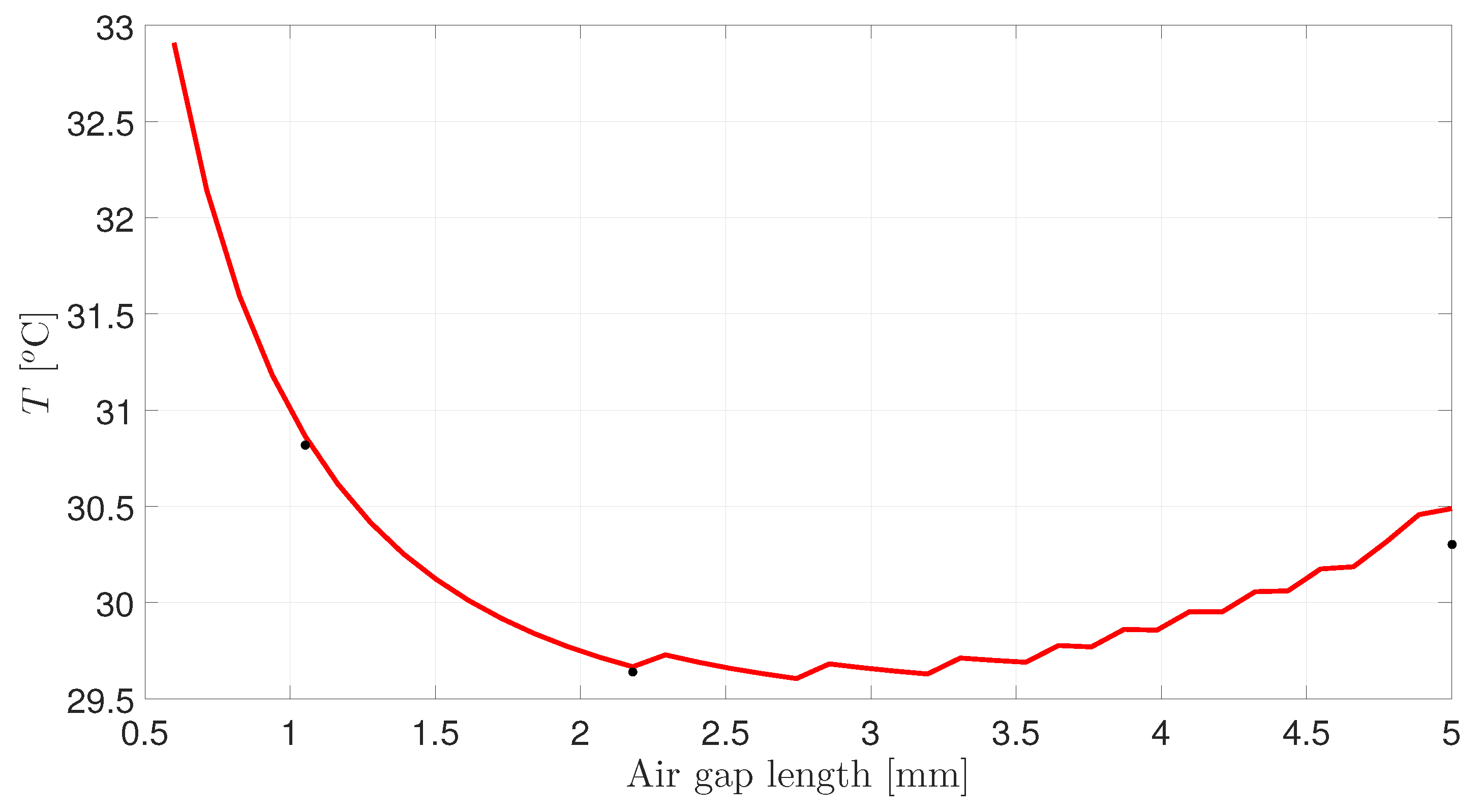
5.1. Air Gap Length Study
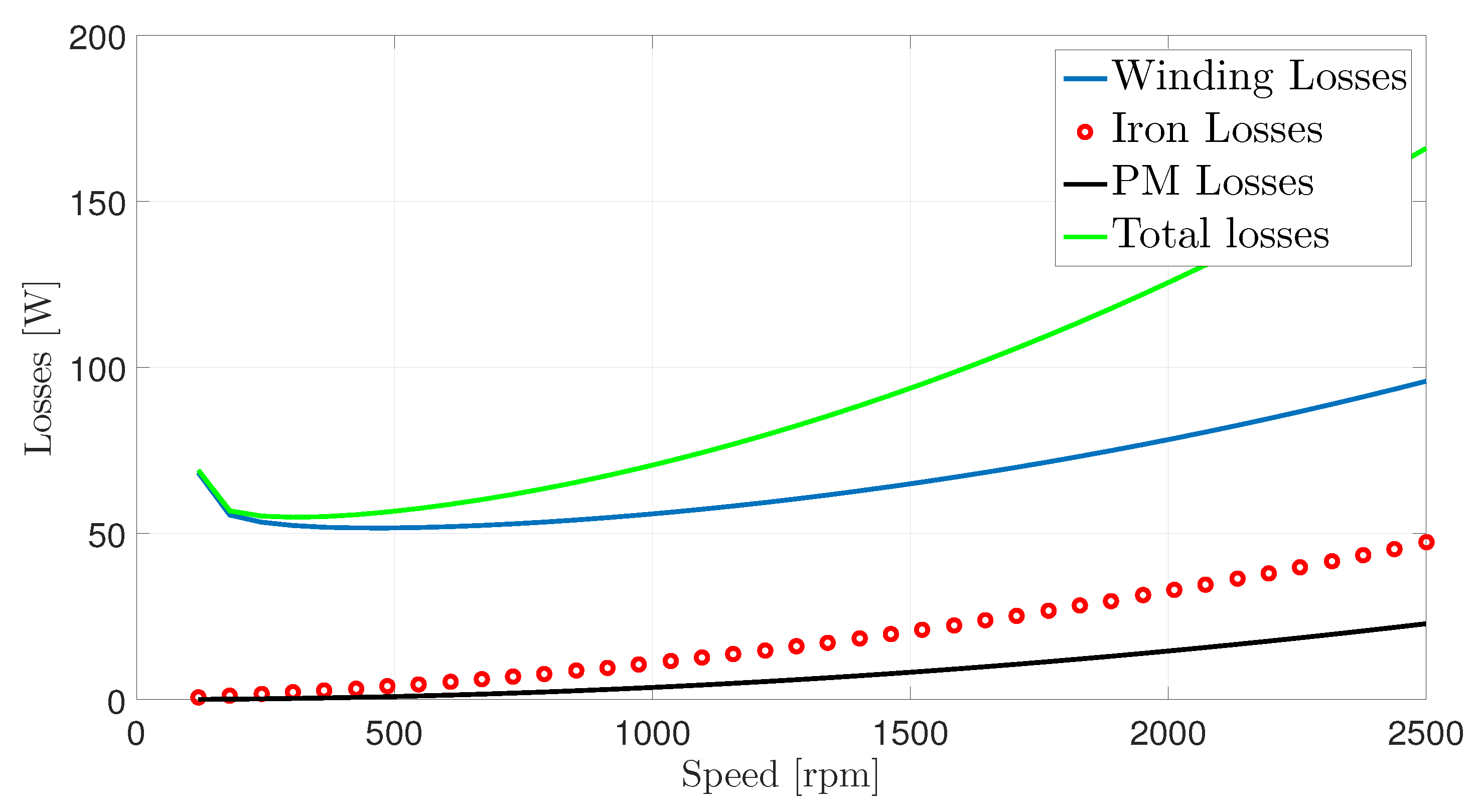
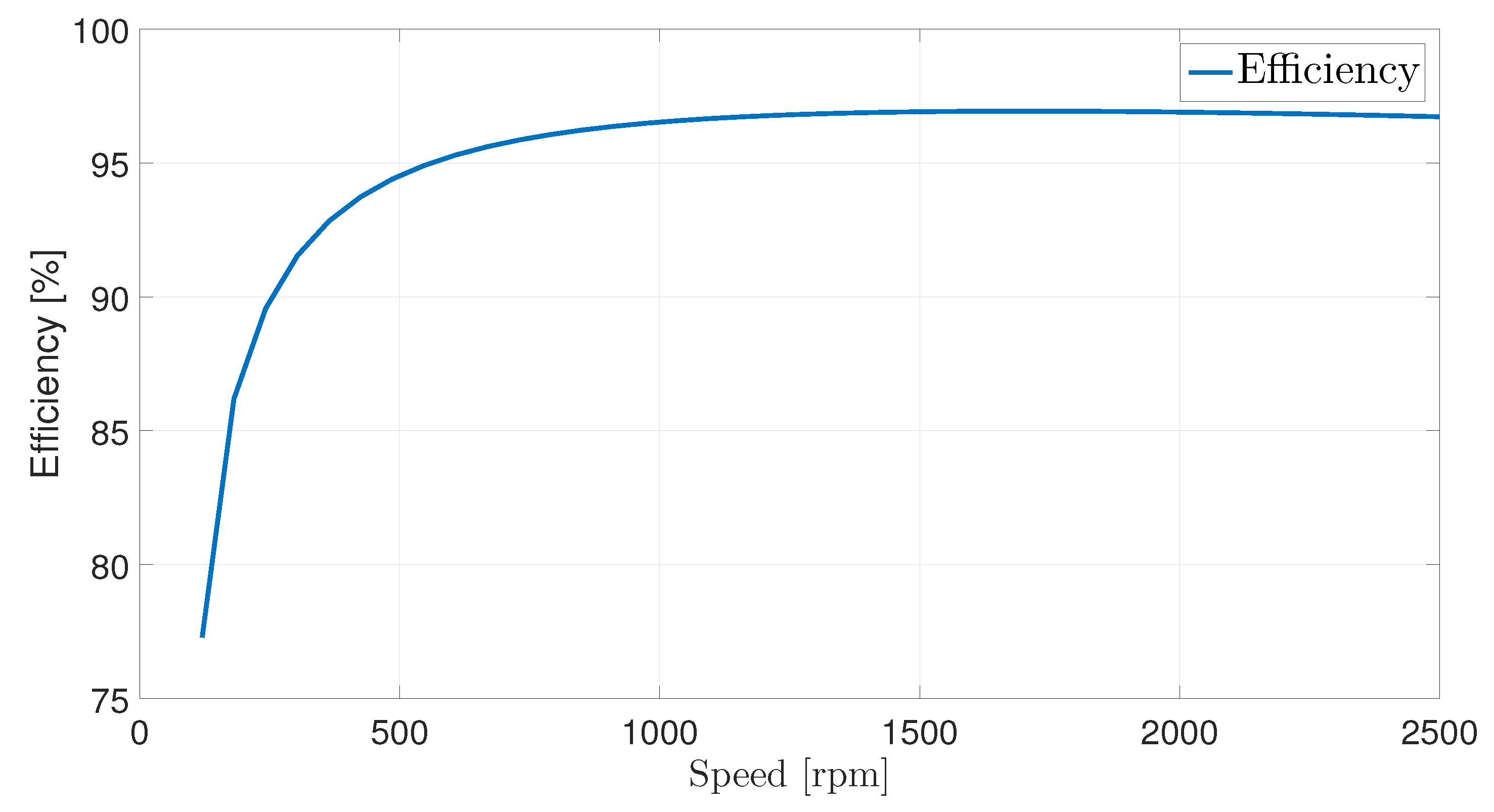
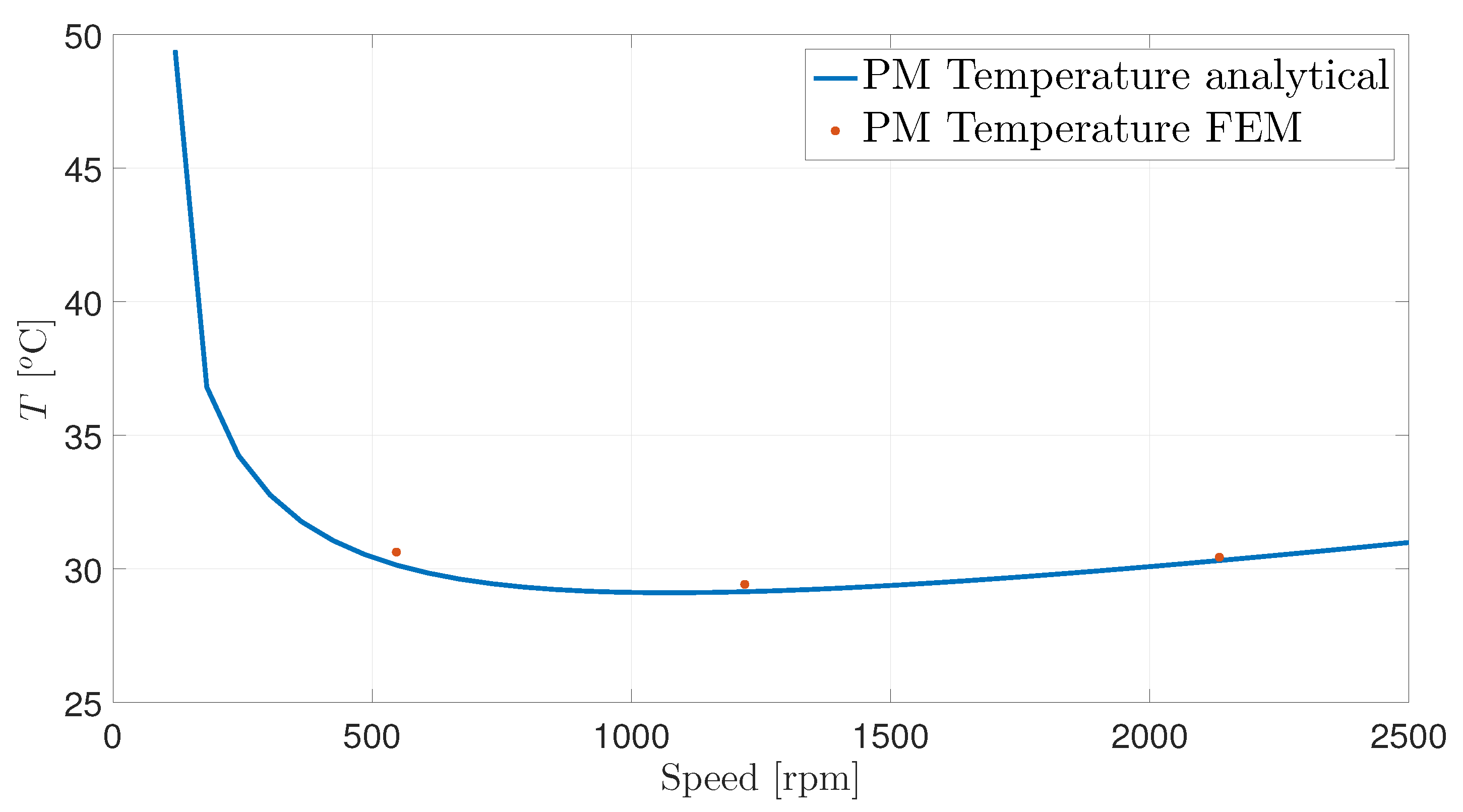
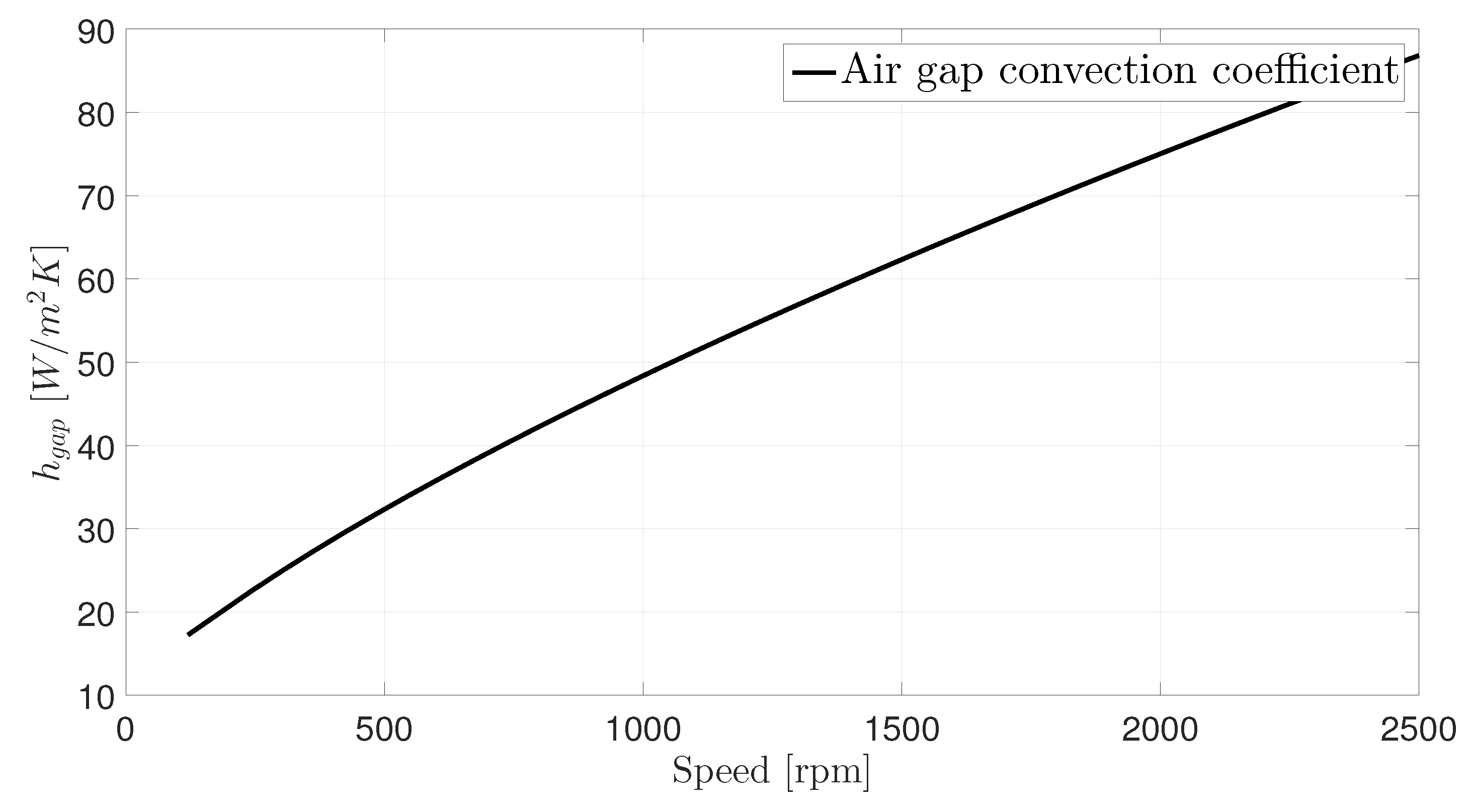
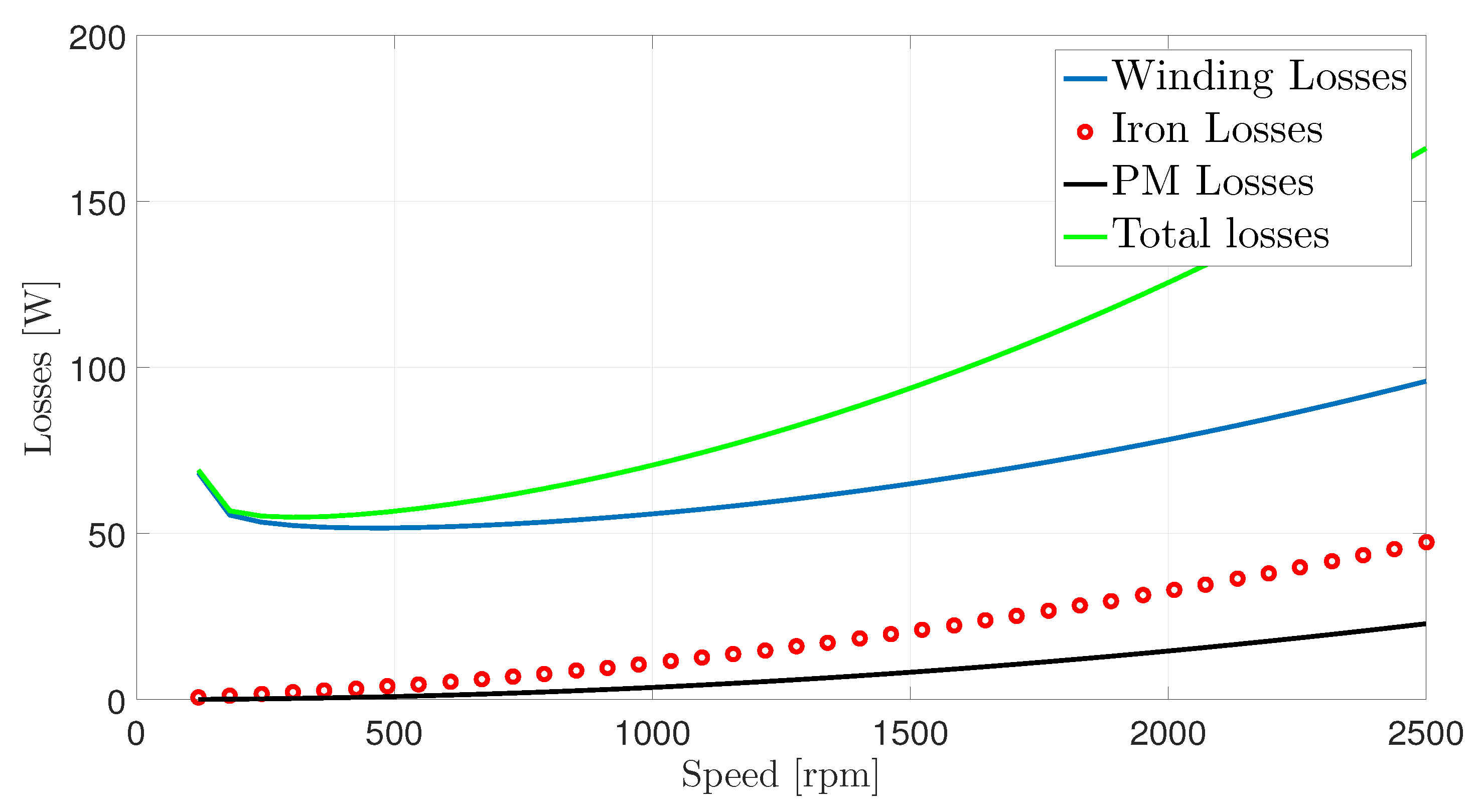
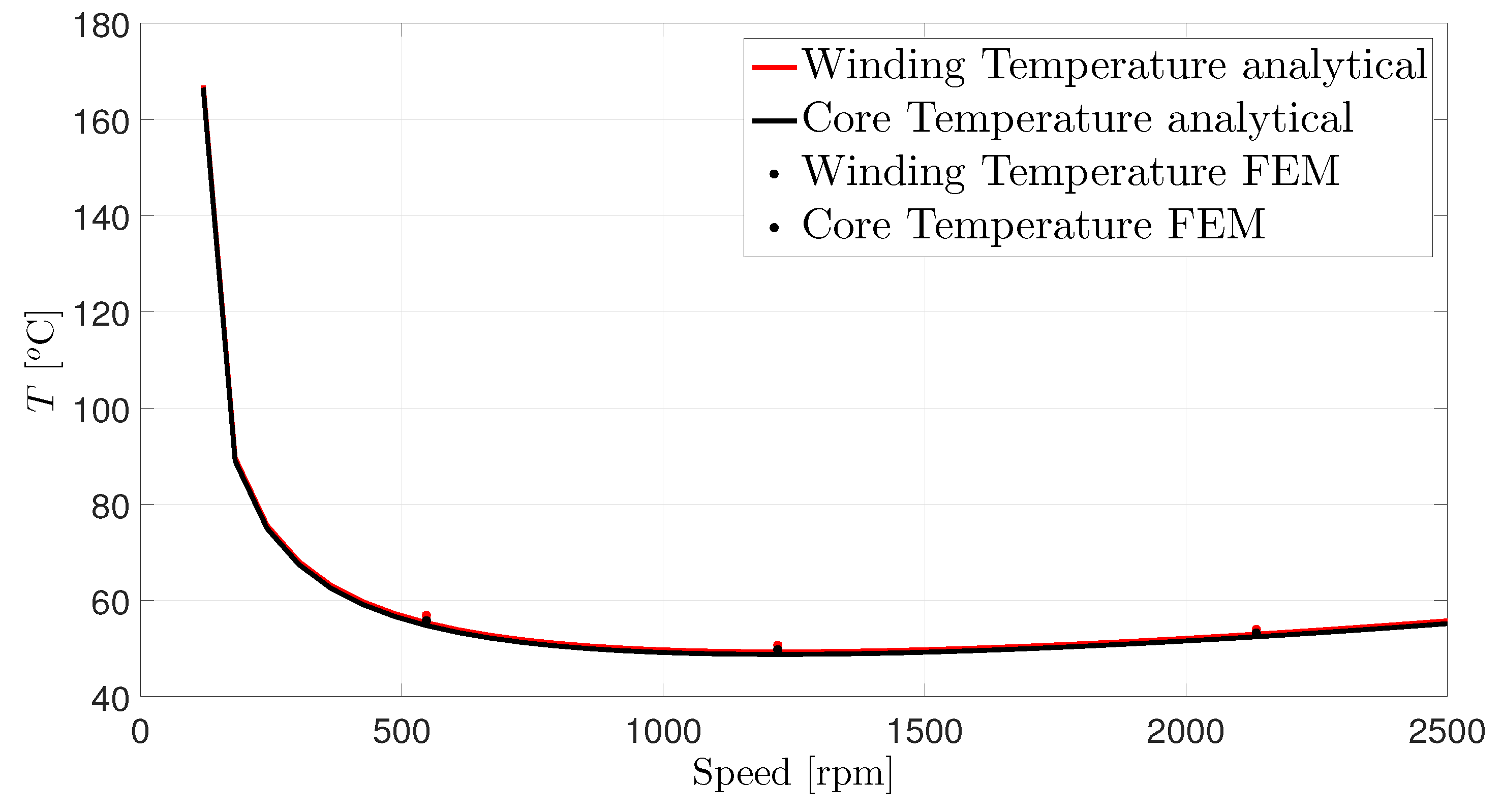
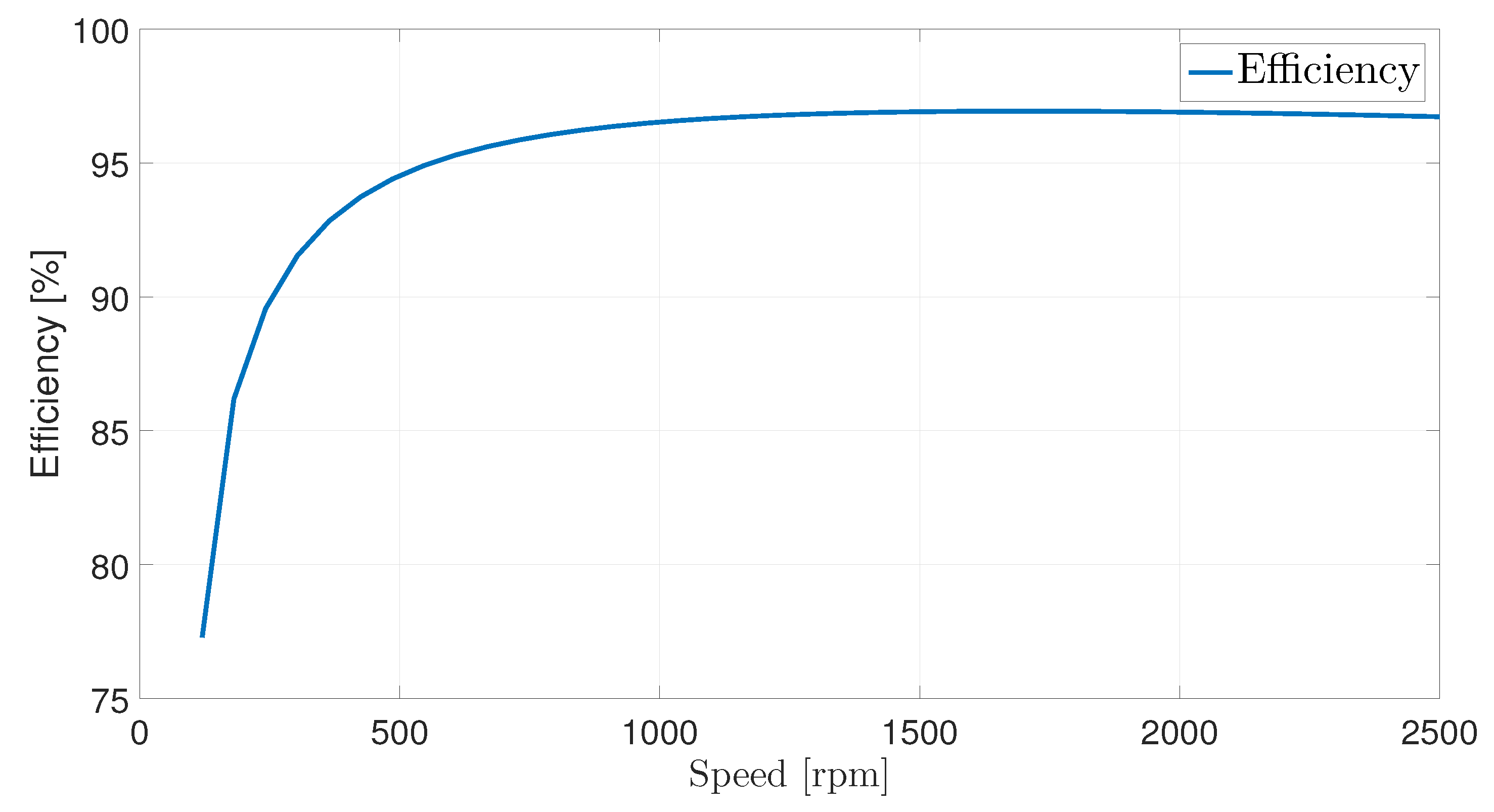
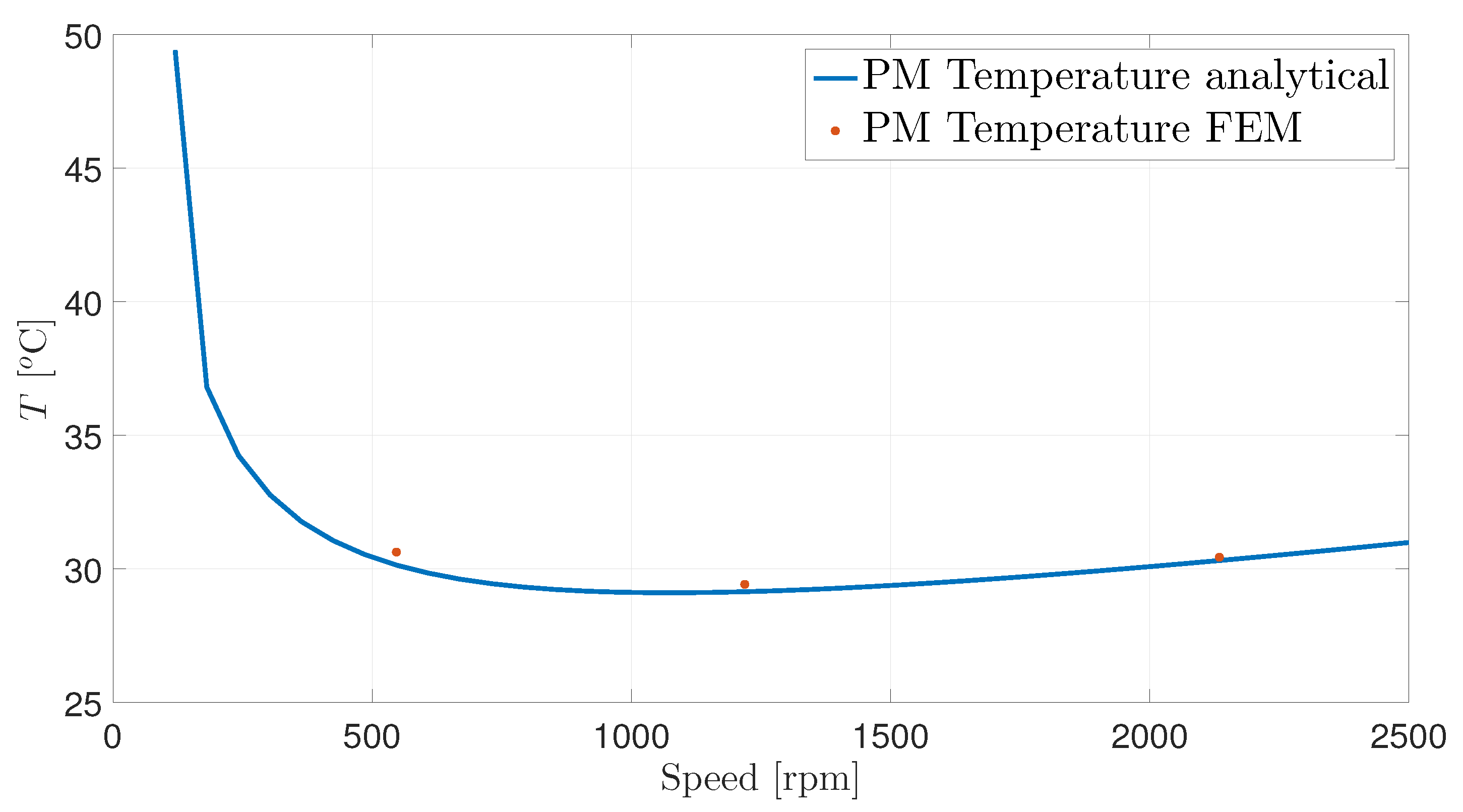
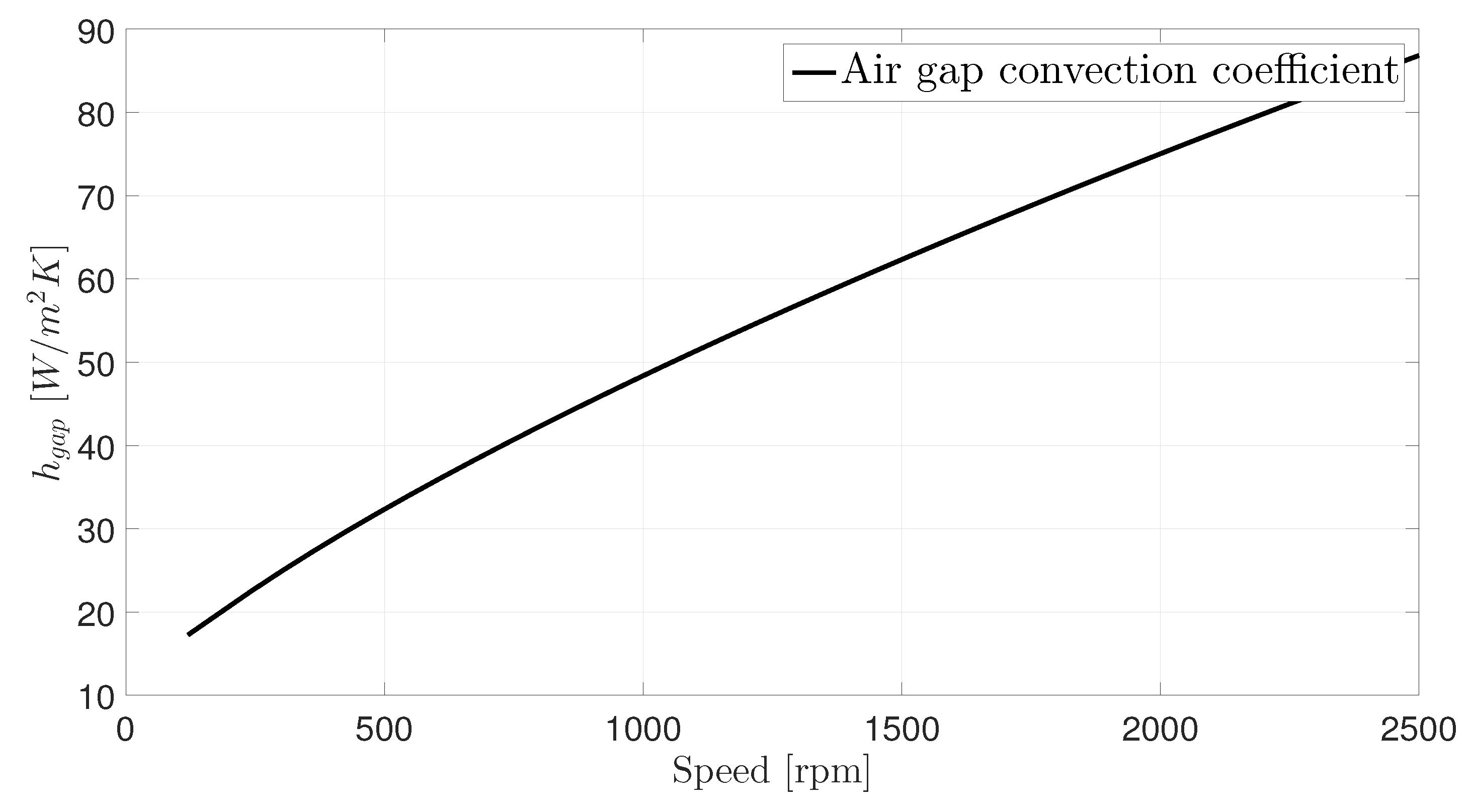
5.2. Variable Speed Study
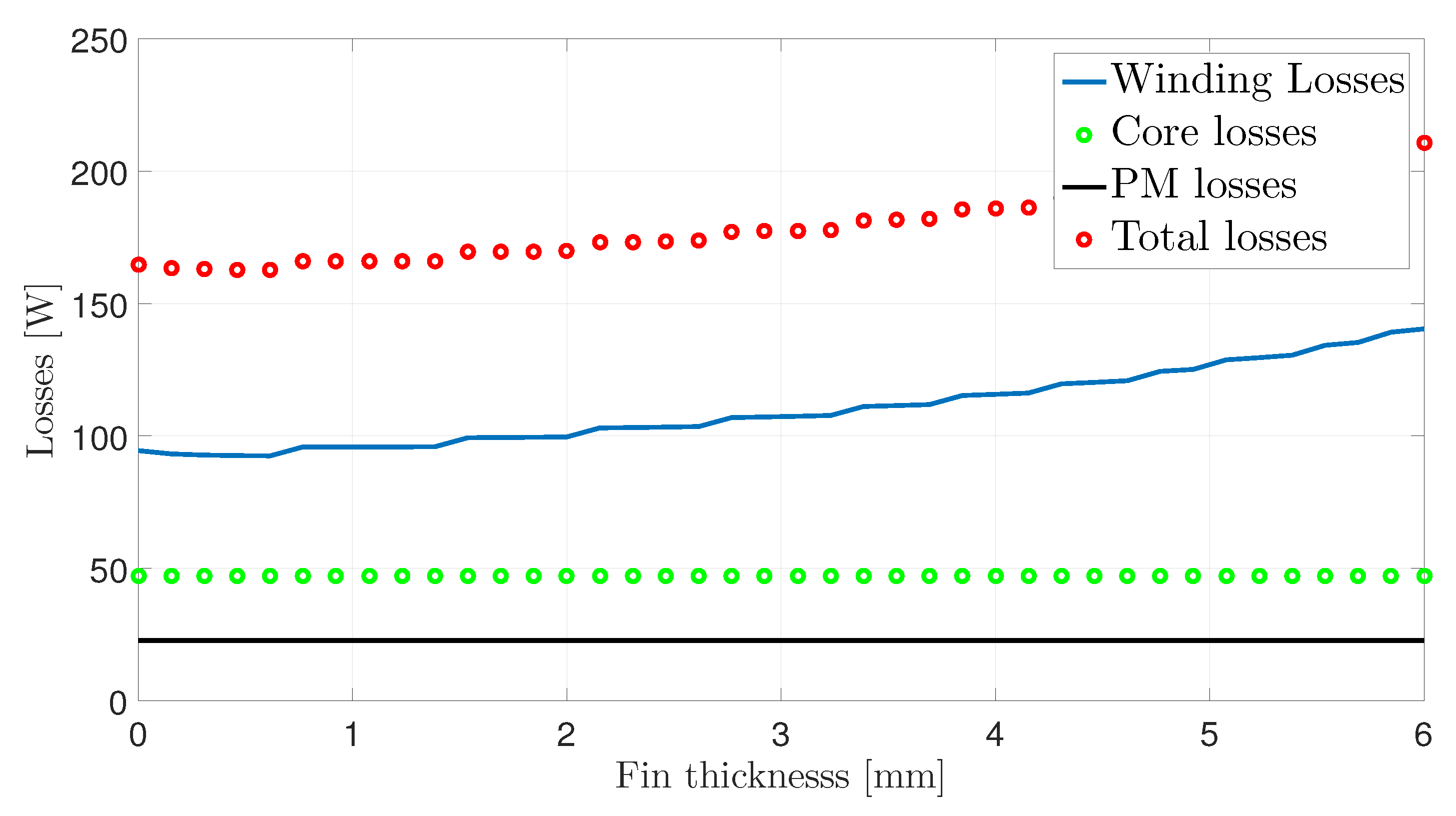
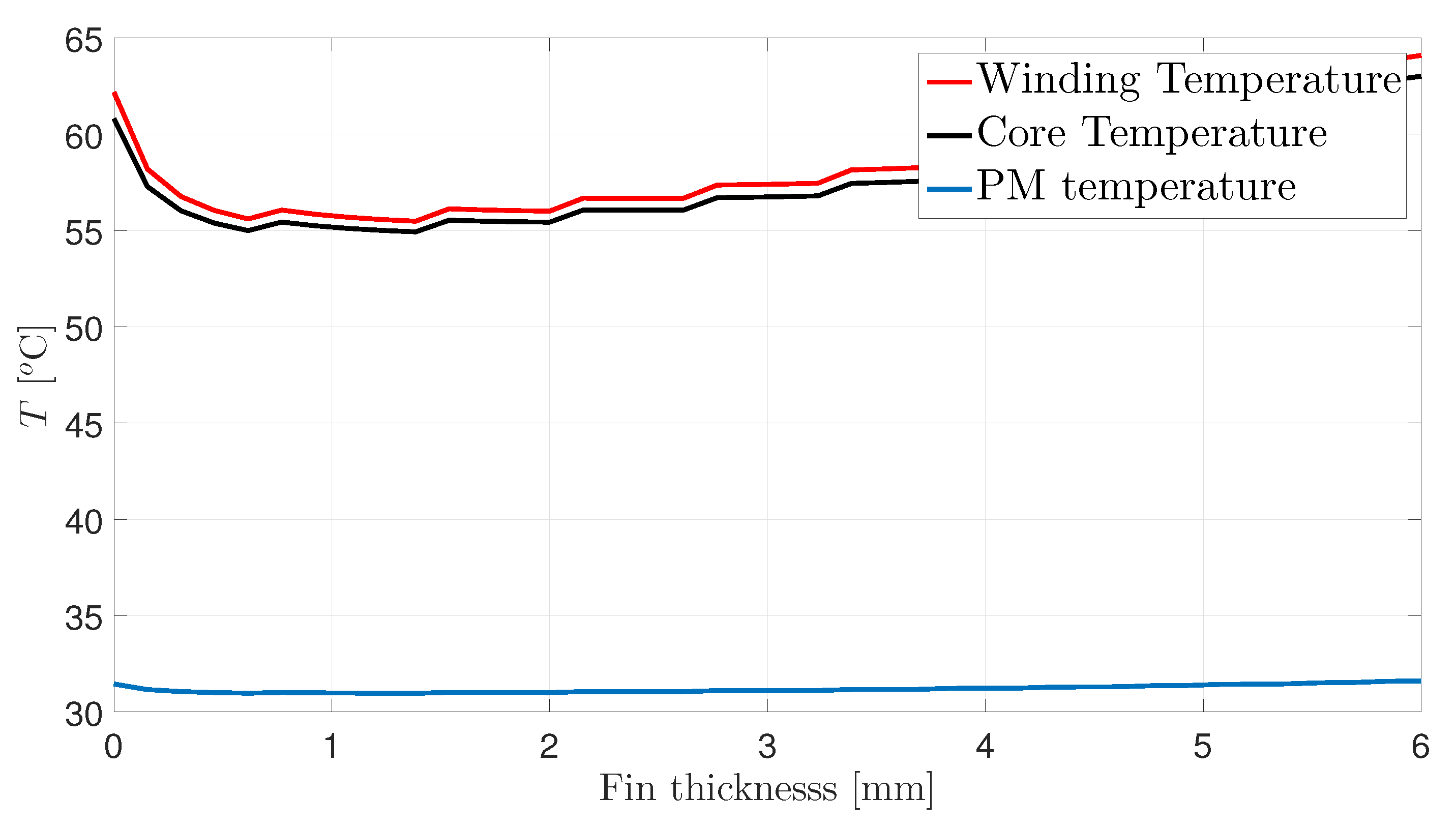
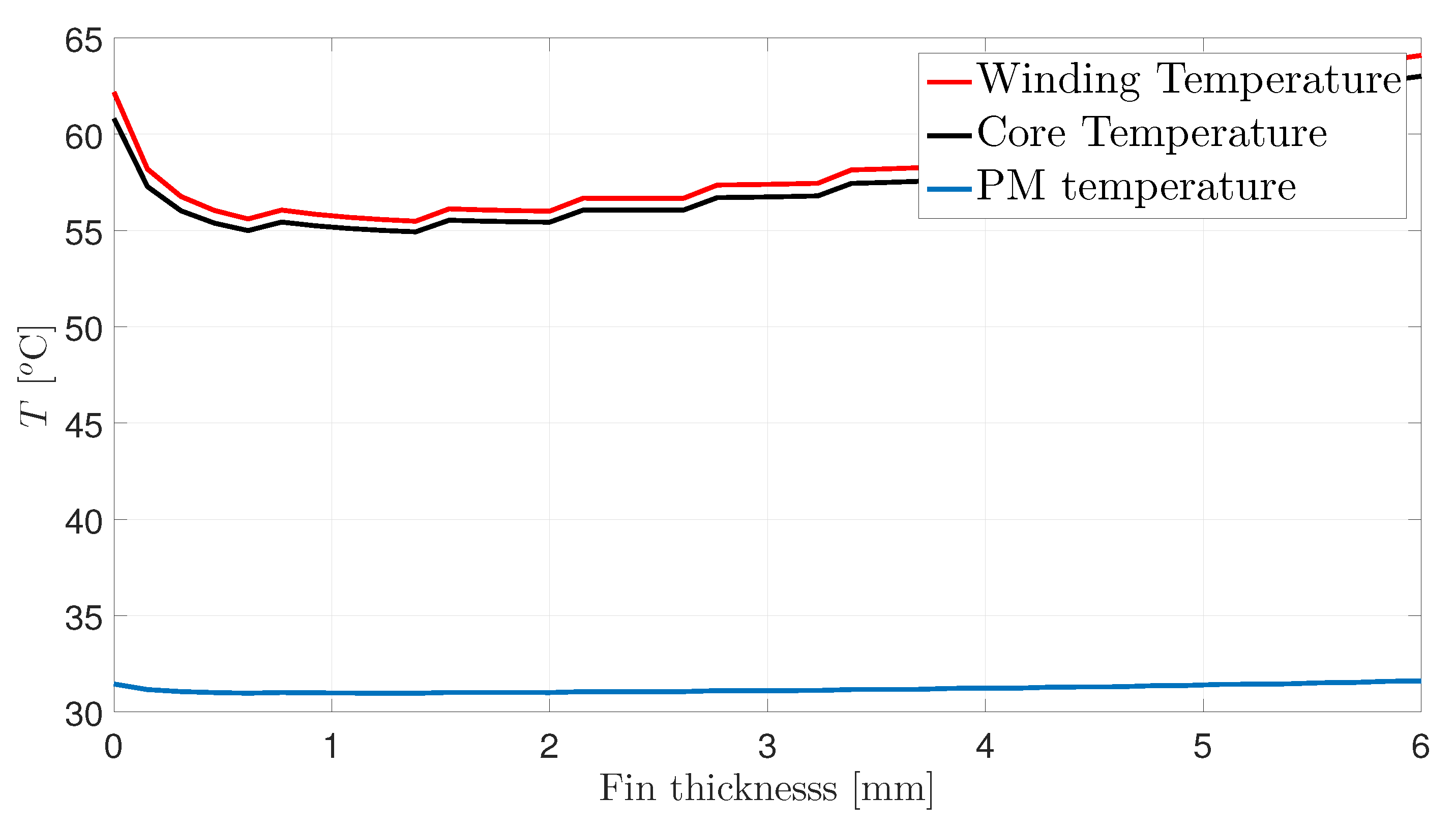
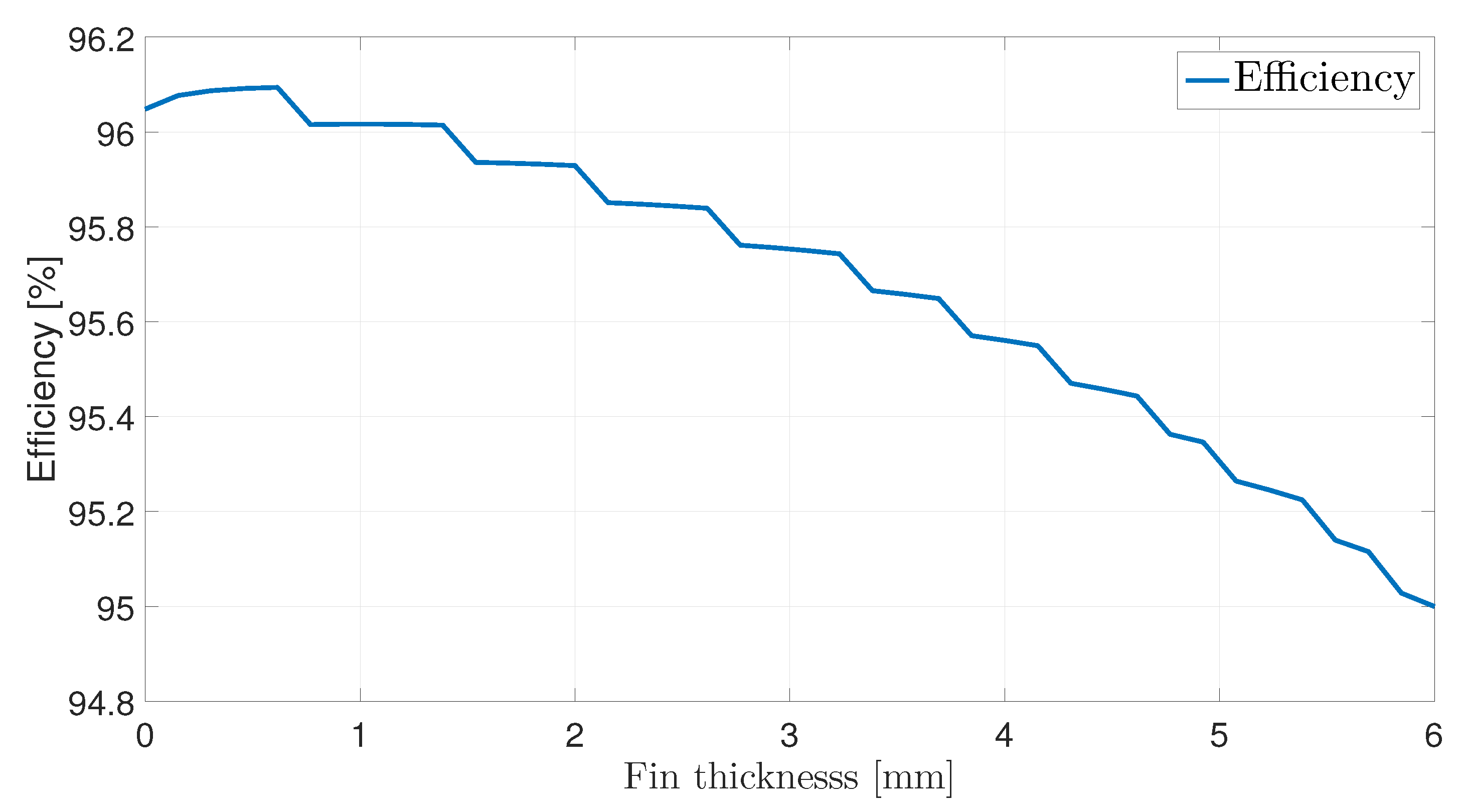
5.3. Inward Heat Extraction Fins Thickness Study
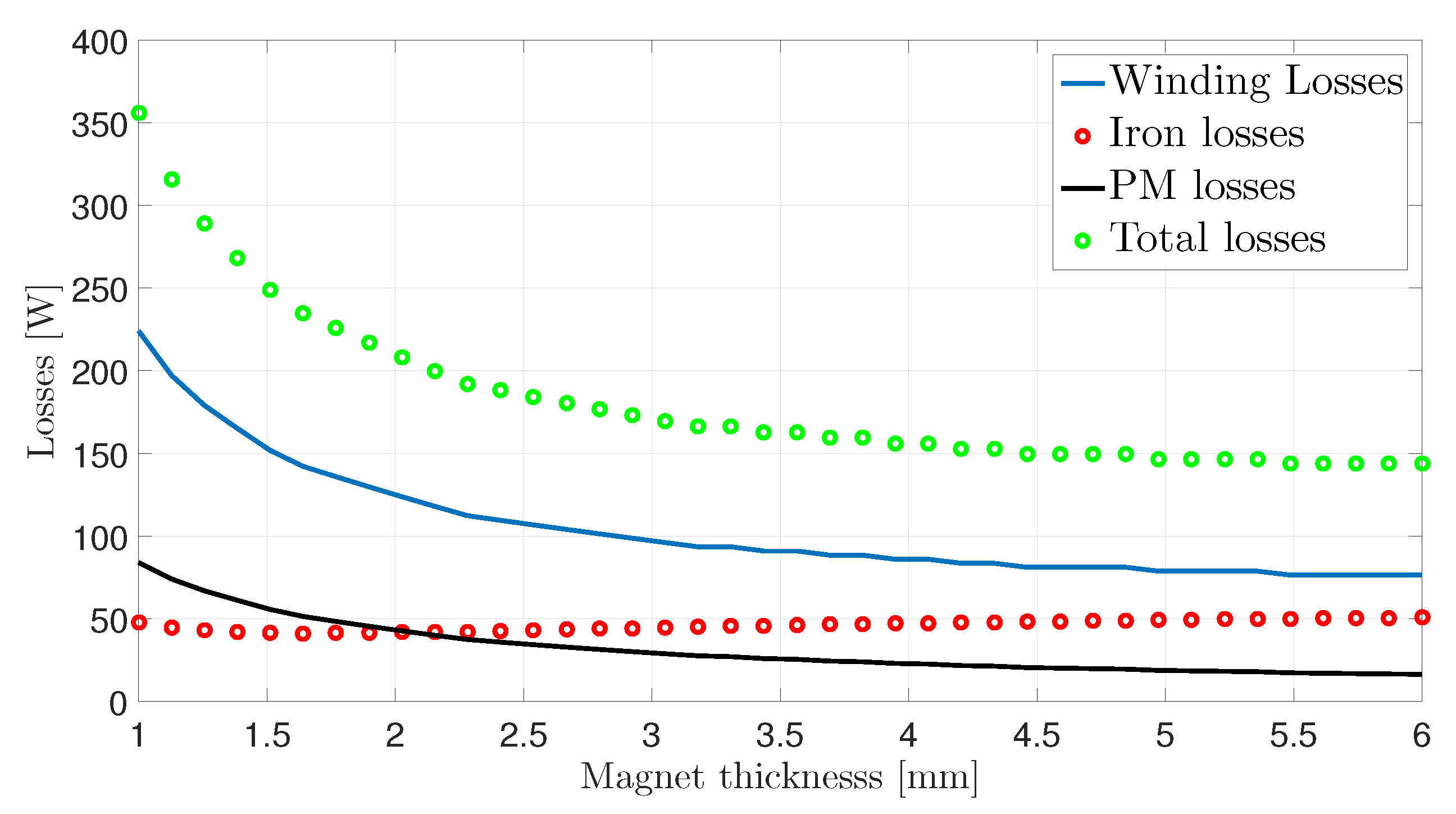
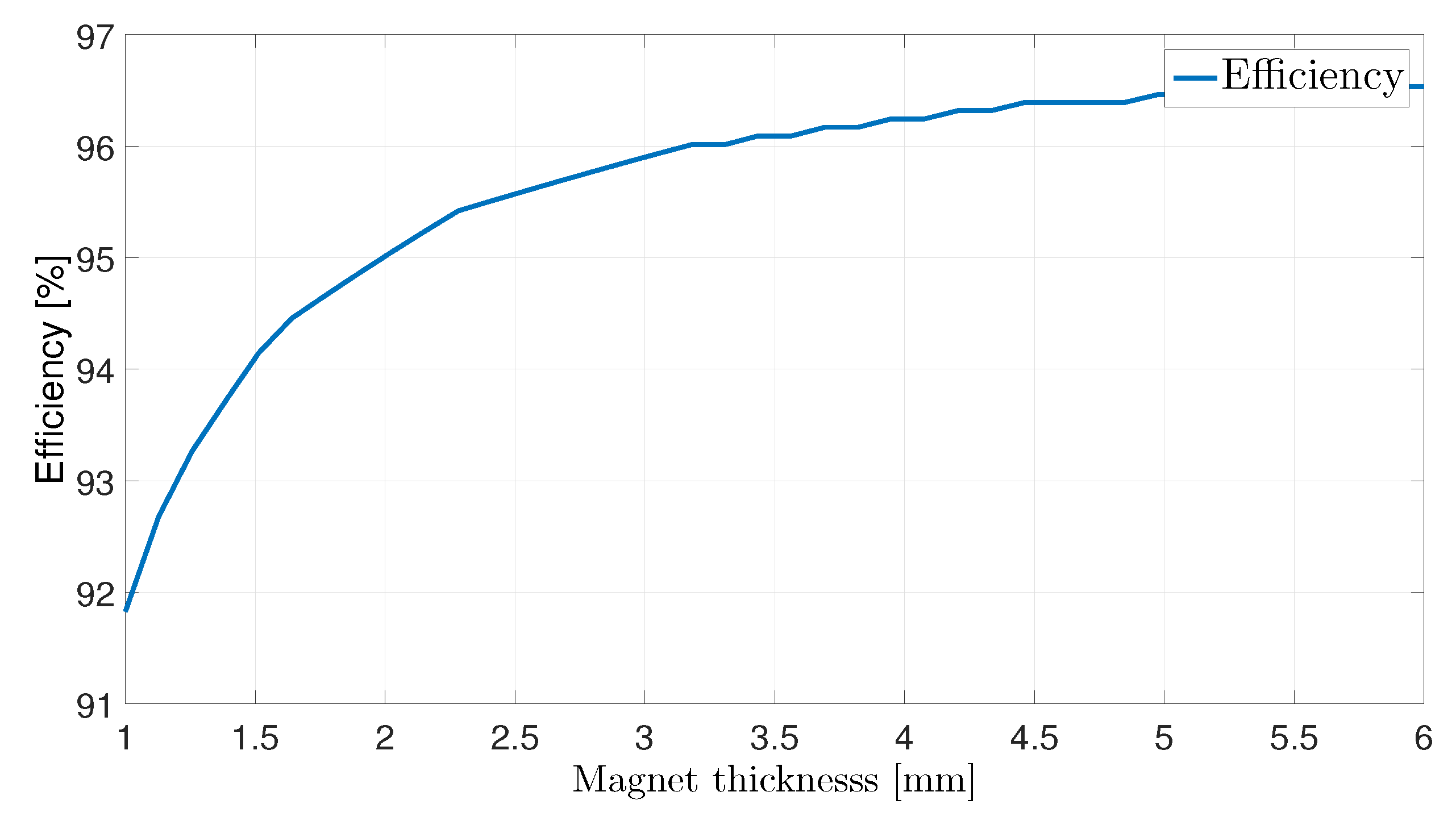
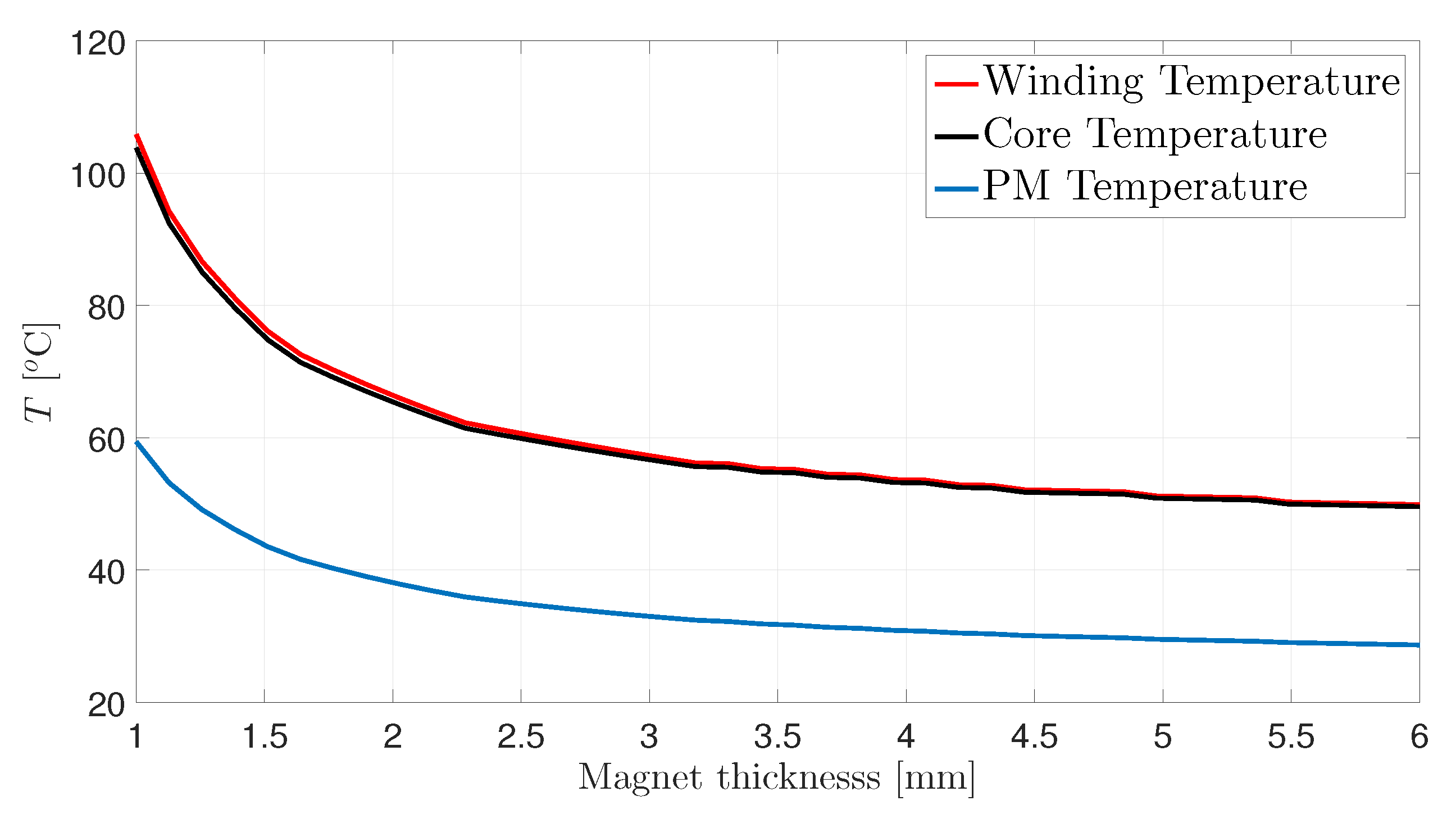
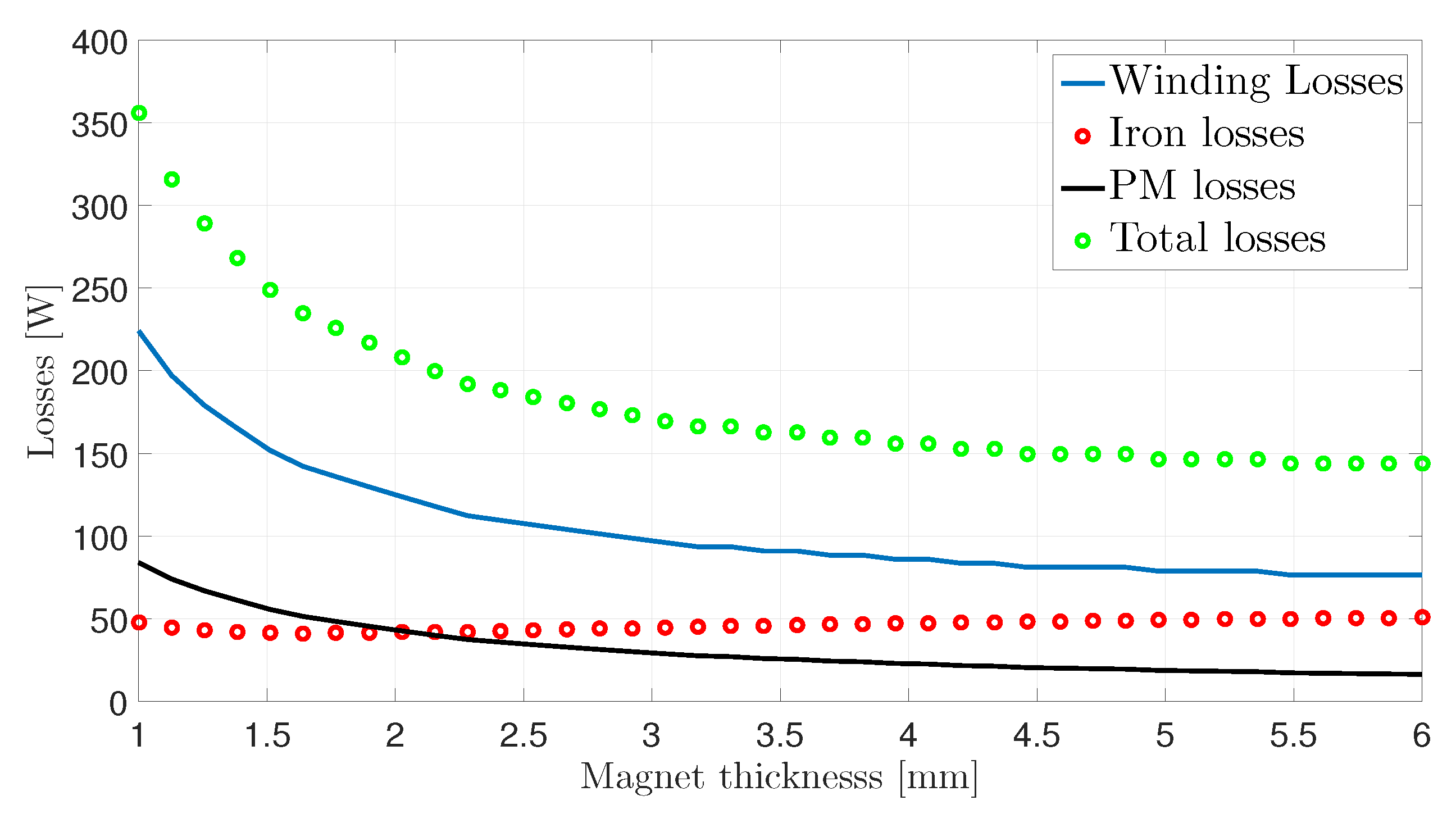
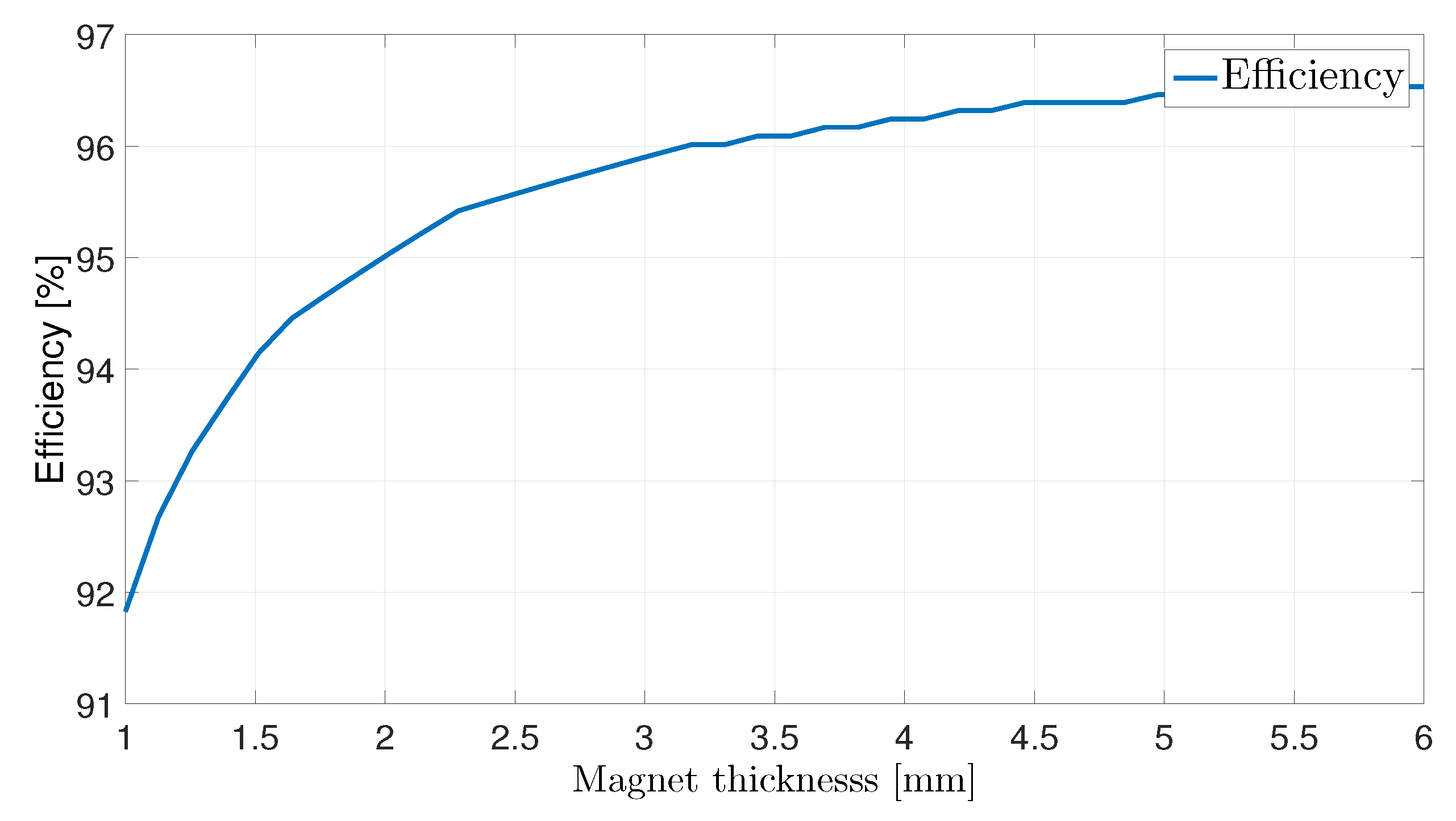
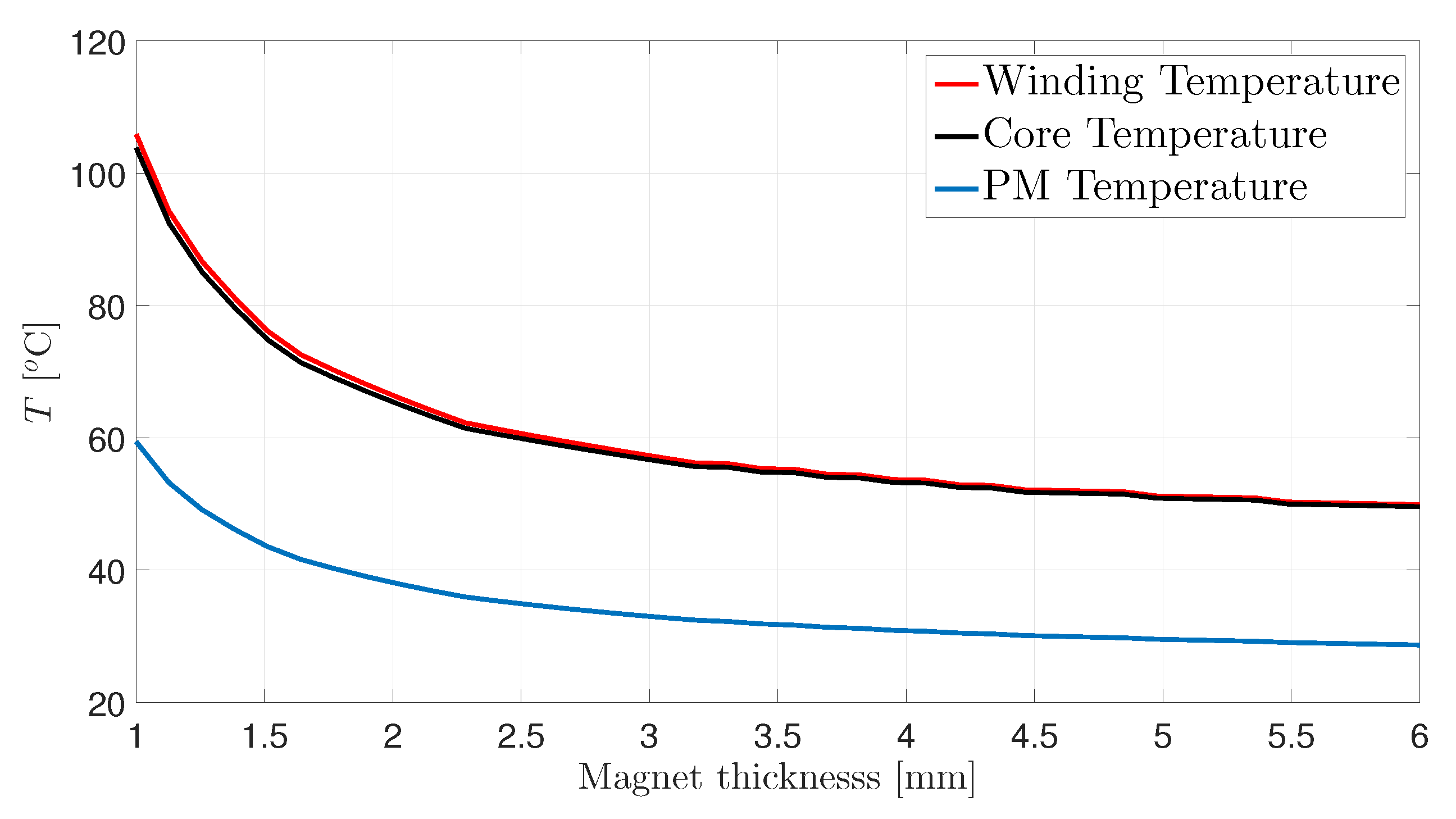
5.4. PM Thickness Study
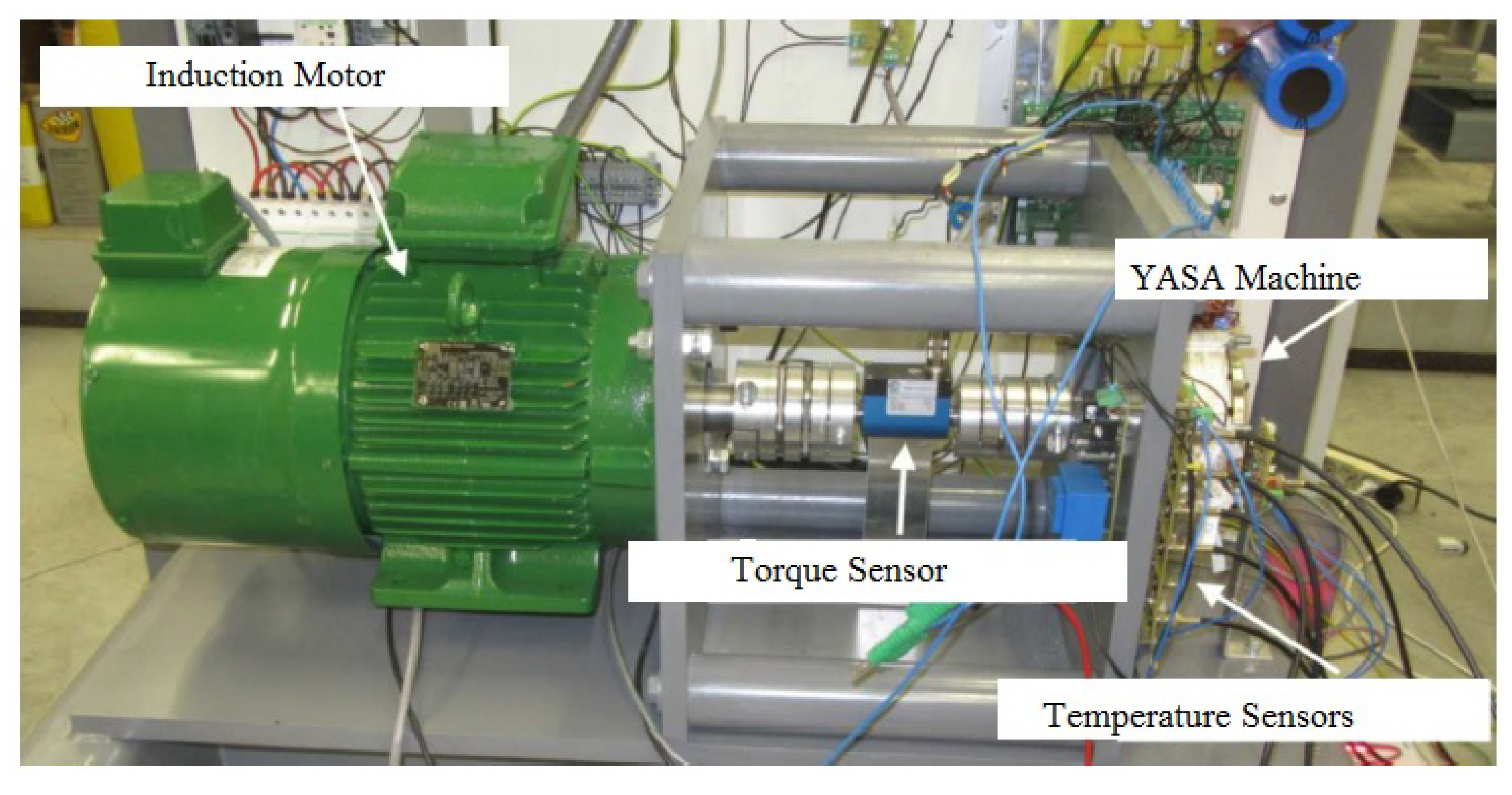
6. Experimental Validation
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Giulii Capponi, F.; De Donato, G.; Caricchi, F. Recent advances in axial-flux permanent-magnet machine technology. IEEE Trans. Ind. Appl. 2012, 48, 2190–2205. [Google Scholar] [CrossRef]
- Hemeida, A.; Sergeant, P. Analytical modeling of surface PMSM using a combined solution of Maxwell’s equations and Magnetic Equivalent Circuit (MEC). IEEE Trans. Magn. 2014, 50, 7027913. [Google Scholar] [CrossRef]
- Woolmer, T.J.; McCulloch, M.D. Analysis of the yokeless and segmented armature machine. In Proceedings of the IEEE International Electric Machines and Drives Conference, IEMDC 2007, Antalya, Turkey, 3–5 May 2007; Volume 1, pp. 704–708. [Google Scholar]
- Letelier, A.B.; González, D.A.; Tapia, J.J.A.; Wallace, R.; Valenzuela, M.A. Cogging torque reduction in an axial flux PM machine via stator slot displacement and skewing. IEEE Trans. Ind. Appl. 2007, 43, 685–693. [Google Scholar] [CrossRef]
- Wang, Z.; Masaki, R.; Morinaga, S.; Enomoto, Y.; Itabashi, H.; Ito, M.; Tanigawa, S. Development of an axial gap motor with amorphous metal cores. IEEE Trans. Ind. Appl. 2011, 47, 1293–1299. [Google Scholar] [CrossRef]
- Hemeida, A.; Sergeant, P.; Vansompel, H. Comparison of Methods for Permanent Magnet Eddy Current Loss Computations With and Without Reaction Field Considerations in Axial Flux PMSM. IEEE Trans. Magn. 2015, 9464, 1–11. [Google Scholar] [CrossRef]
- Hsieh, M.F.; Hsu, Y.C. A Generalized Magnetic Circuit Modeling Approach for Design of Surface Permanent-Magnet Machines. IEEE Trans. Ind. Electron. 2012, 59, 779–792. [Google Scholar] [CrossRef]
- Kano, Y.; Kosaka, T.; Matsui, N. A simple nonlinear magnetic analysis for axial-flux permanent-magnet machines. IEEE Trans. Ind. Electron. 2010, 57, 2124–2133. [Google Scholar] [CrossRef]
- Tangudu, J.; Jahns, T.; EL-Refaie, A.; Zhu, Z. Lumped parameter magnetic circuit model for fractional-slot concentrated-winding interior permanent magnet machines. In Proceedings of the 2009 IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 2423–2430. [Google Scholar]
- Tan, Z.; Song, X.G.; Ji, B.; Liu, Z.; Ma, J.E.; Cao, W.P. 3D thermal analysis of a permanent magnet motor with cooling fans. J. Zhejiang Univ. Sci. A 2015, 16, 616–621. [Google Scholar] [CrossRef]
- Polikarpova, M.; Ponomarev, P.; Lindh, P.; Petrov, I.; Jara, W.; Naumanen, V.; Tapia, J.A.; Pyrhonen, J. Hybrid Cooling Method of Axial-Flux Permanent-Magnet Machines for Vehicle Applications. IEEE Trans. Ind. Electron. 2015, 62, 7382–7390. [Google Scholar] [CrossRef]
- Marignetti, F.; Delli Colli, V.; Coia, Y. Design of Axial Flux PM Synchronous Machines Through 3-D Coupled Electromagnetic Thermal and Fluid-Dynamical Finite-Element Analysis. IEEE Trans. Ind. Electron. 2008, 55, 3591–3601. [Google Scholar] [CrossRef]
- Marignetti, F.; Colli, V. Thermal Analysis of an Axial Flux Permanent-Magnet Synchronous Machine. IEEE Trans. Magn. 2009, 45, 2970–2975. [Google Scholar] [CrossRef]
- Rostami, N.; Feyzi, M.R.; Pyrhonen, J.; Parviainen, A.; Niemela, M. Lumped-Parameter Thermal Model for Axial Flux Permanent Magnet Machines. IEEE Trans. Magn. 2013, 49, 1178–1184. [Google Scholar] [CrossRef]
- Lim, C.; Bumby, J.; Dominy, R.; Ingram, G.; Mahkamov, K.; Brown, N.; Mebarki, A.; Shanel, M. 2-D lumped-parameter thermal modelling of axial flux permanent magnet generators. In Proceedings of the 2008 18th International Conference on Electrical Machines, Vilamoura, Portugal, 6–9 September 2008; pp. 1–6. [Google Scholar]
- Mohamed, A.H.; Hemeida, A.; Rashekh, A.; Vansompel, H.; Arkkio, A.; Sergeant, P. A 3D Dynamic Lumped Parameter Thermal Network of Air-Cooled YASA Axial Flux Permanent Magnet Synchronous Machine. Energies 2018, 11, 774. [Google Scholar] [CrossRef]
- Jiang, W.; Member, S.; Jahns, T.M. Coupled Electromagnetic-Thermal Analysis of Electric Machines Including Transient Operation Based on Finite-Element Techniques. IEEE Trans. Ind. Appl. 2015, 51, 1880–1889. [Google Scholar] [CrossRef]
- Bertotti, G. General Properties of Power Losses in Soft Ferromagnetic Materials. IEEE Trans. Magn. 1987, 24, 621–630. [Google Scholar] [CrossRef]
- Vansompel, H. Design of an Energy Efficient Axial Flux Permanent Magnet Machine. Ph.D. thesis, Ghent University, Ghent, Belgium, 2013. [Google Scholar]
- Rasekh, A.; Sergeant, P.; Vierendeels, J. Convective heat transfer prediction in disk-type electrical machines. Appl. Therm. Eng. 2015, 91, 778–790. [Google Scholar] [CrossRef]
- Rasekh, A.; Sergeant, P.; Vierendeels, J. Fully predictive heat transfer coefficient modeling of an axial flux permanent magnet synchronous machine with geometrical parameters of the magnets. Appl. Therm. Eng. 2017, 110, 1343–1357. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | K (W/mK) | (J/kgK) | (kg/m) |
|---|---|---|---|
| copper | 385 | 392 | 8890 |
| aluminum | 167 | 896 | 2712 |
| epoxy | 0.4 | 600 | 1540 |
| nylon | 0.25 | 1600 | 1140 |
| Nd-Fe-B | 9 | 500 | 7500 |
| Parameter | Value | Unit |
|---|---|---|
| number of poles | 16 | - |
| teeth number | 15 | - |
| outer diameter housing | 195 | mm |
| outer diameter active | 148 | mm |
| PM thickness | 4 | mm |
| rotor outer radius | 74 | mm |
| slot width | 11 | mm |
| Speed (rpm) | Analytical (C) | FEM (C) | Experimental (C) |
|---|---|---|---|
| 1000 | 61.73 | 63.89 | 62.74 |
| 2000 | 49.03 | 50.13 | 51.43 |
| Speed (rpm) | Analytical (C) | FEM (C) | Experimental (C) |
|---|---|---|---|
| 1000 | 29.44 | 29.93 | 30.52 |
| 2000 | 26.89 | 27.05 | 28.12 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohamed, A.H.; Hemeida, A.; Vansompel, H.; Sergeant, P. Parametric Studies for Combined Convective and Conductive Heat Transfer for YASA Axial Flux Permanent Magnet Synchronous Machines. Energies 2018, 11, 2983. https://doi.org/10.3390/en11112983
Mohamed AH, Hemeida A, Vansompel H, Sergeant P. Parametric Studies for Combined Convective and Conductive Heat Transfer for YASA Axial Flux Permanent Magnet Synchronous Machines. Energies. 2018; 11(11):2983. https://doi.org/10.3390/en11112983
Chicago/Turabian StyleMohamed, Abdalla Hussein, Ahmed Hemeida, Hendrik Vansompel, and Peter Sergeant. 2018. "Parametric Studies for Combined Convective and Conductive Heat Transfer for YASA Axial Flux Permanent Magnet Synchronous Machines" Energies 11, no. 11: 2983. https://doi.org/10.3390/en11112983
APA StyleMohamed, A. H., Hemeida, A., Vansompel, H., & Sergeant, P. (2018). Parametric Studies for Combined Convective and Conductive Heat Transfer for YASA Axial Flux Permanent Magnet Synchronous Machines. Energies, 11(11), 2983. https://doi.org/10.3390/en11112983