Impact of Vehicular Networks on Emergency Medical Services in Urban Areas

 , ,
, ,
Abstract
:1. Introduction
2. Related Work
2.1. 802.11p
- Interoperability and compatibility with numerous dedicated short-range communication (DSRC) standards, including ITS-dedicated communication standards E2213-02, CALM M5, and IEEE 802.11a. This compatibility gives IEEE 802.11p exceptional market acceptance.
- High-speed mobility, unlike many DSRC technologies that are incapable of implementing high-speed mobile access.
- Support from IEEE and the U.S. Department of Transportation, which is responsible for infrastructure construction.
2.2. Proposed Methods for Reducing EV Travel Time
2.2.1. Path Clearing
2.2.2. Route Guidance
2.2.3. Traffic Light Preemption
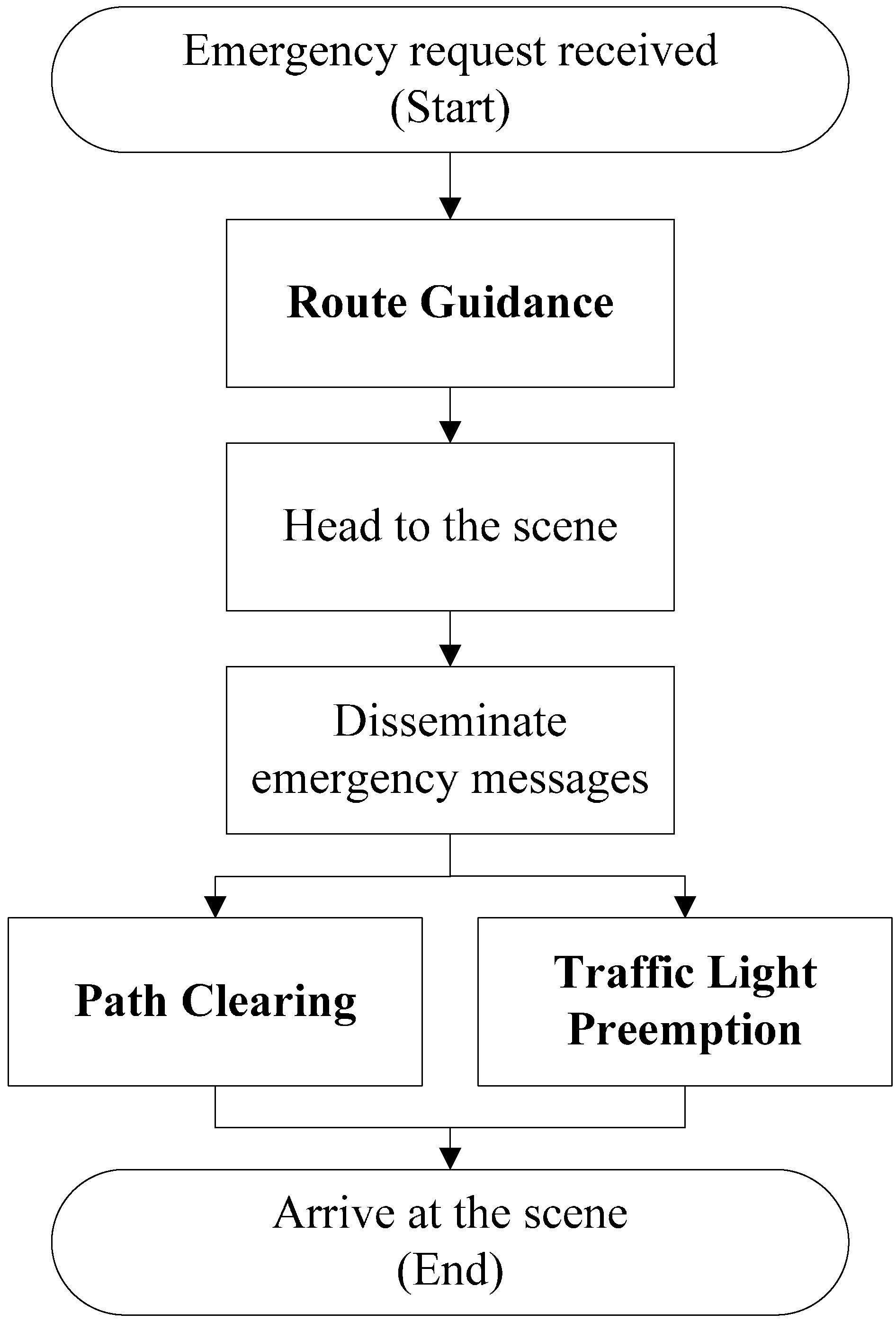
3. System Implementation
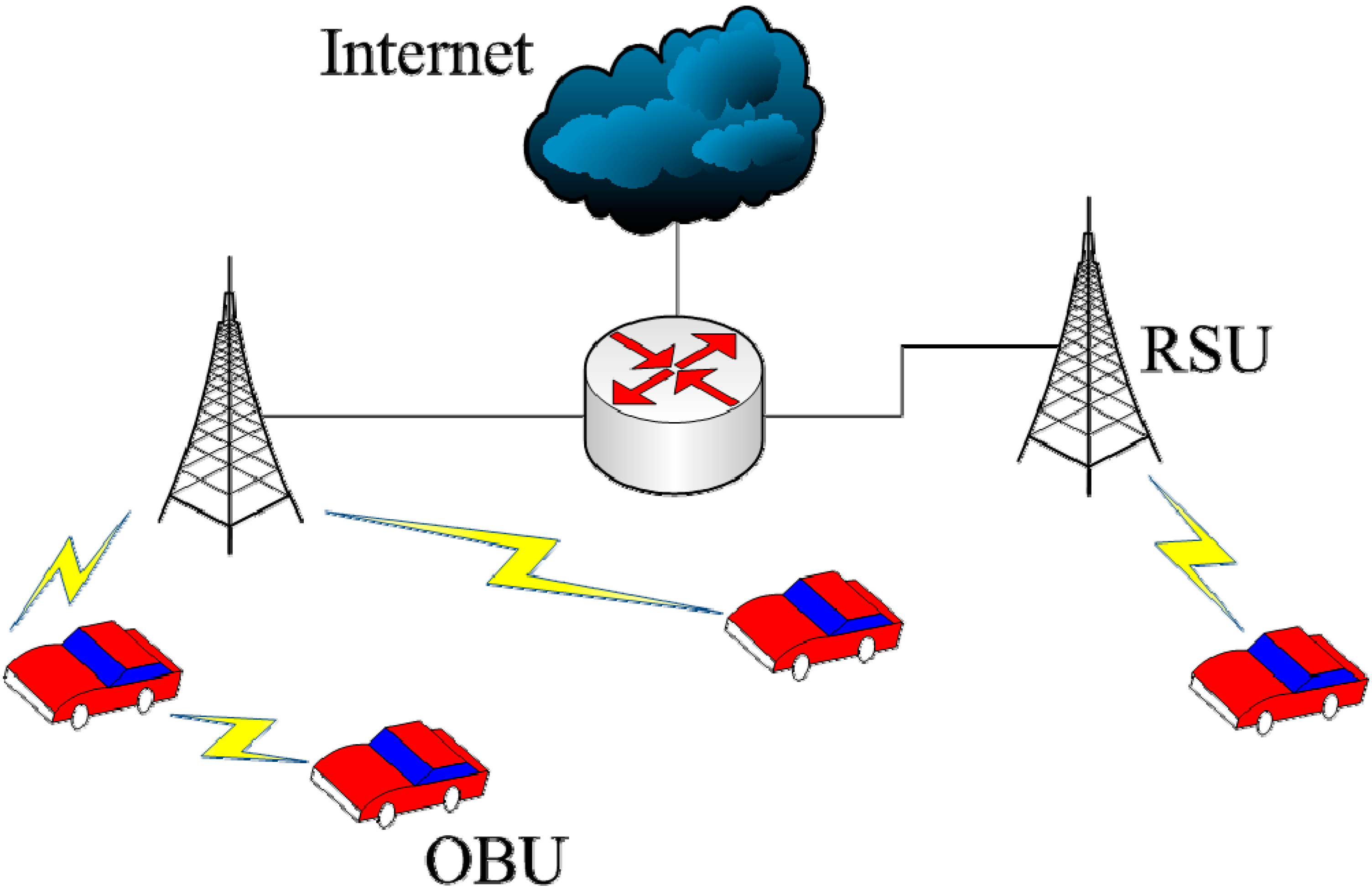
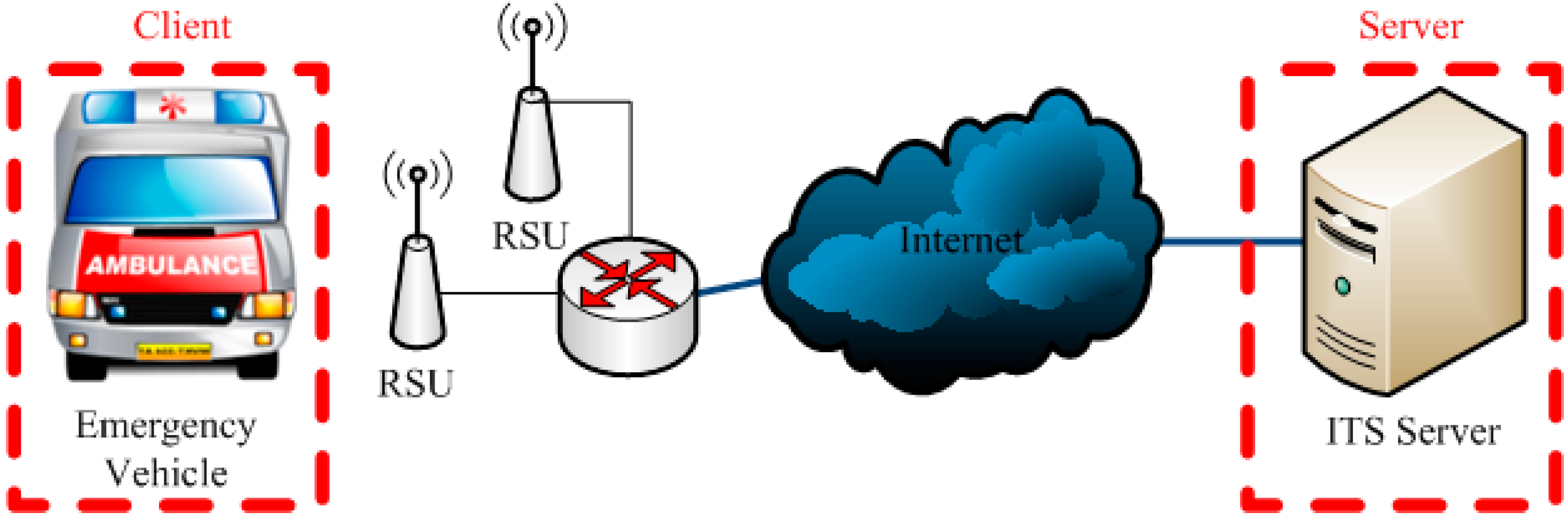
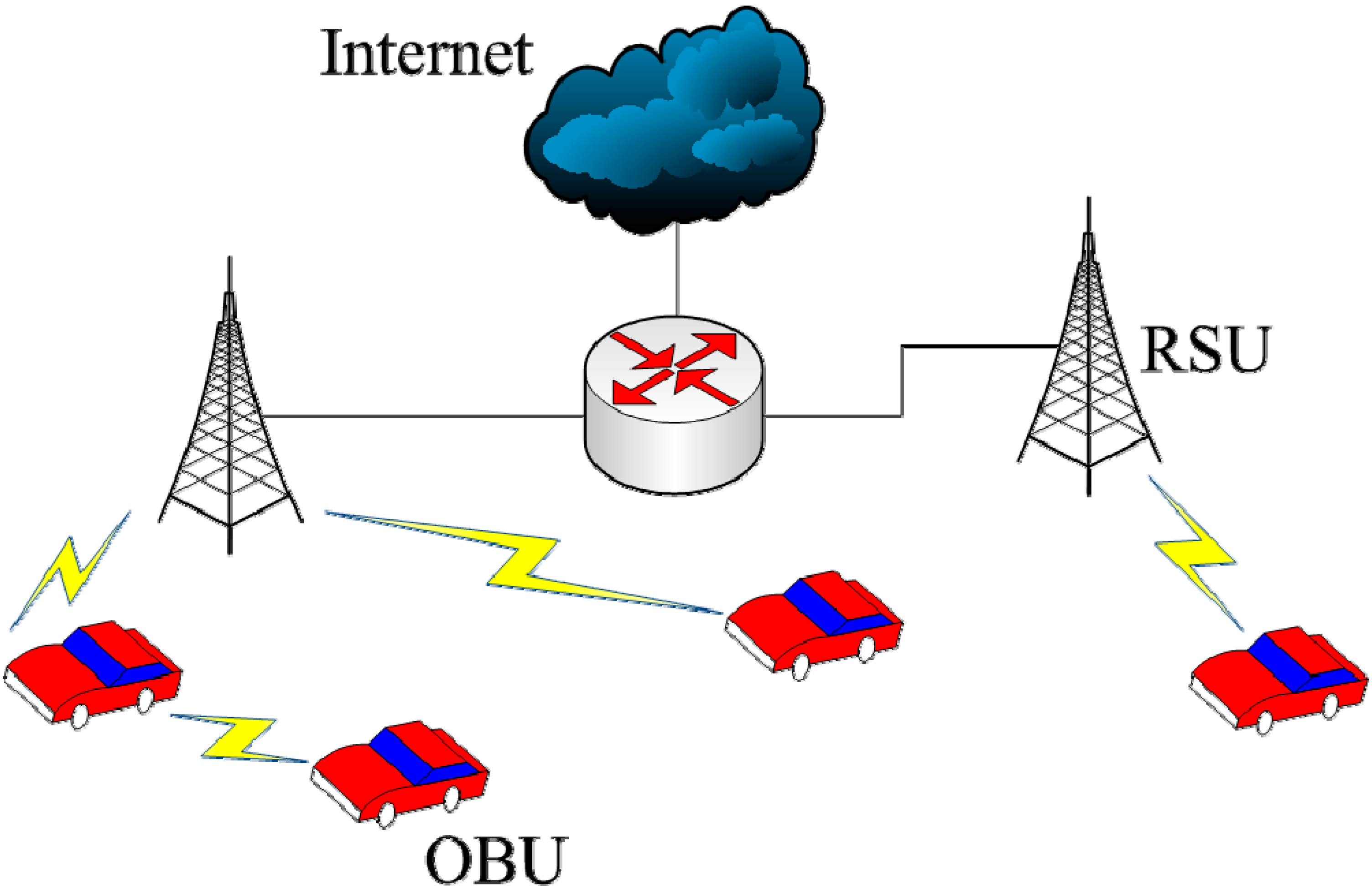
3.1. System Overview
- EV equipment consists of a GPS receiver (used to obtain location data) and an OBU (WAVE/DSRC) to send messages to other vehicles and RSUs.
- The ITS server controls all traffic information and provides real-time traffic data to the EV. The server also alters traffic lights as necessary to enable the EV to quickly move through intersections.
- RSUs installed along roadsides have two functions: collecting data such as the number of vehicles and their average speeds and feeding them to the ITS server, and supporting communications between the EV and the ITS server. Note that the average speeds of vehicles can be obtained by the ITS server in different ways. For example, each vehicle can transmit its current speed to the ITS server through other vehicles using V2V communication. This paper, however, assumes a RSU can detect the average speed of nearby vehicles and transmits the speed information to the ITS server. This assumption is fairly realistic in urban areas. For instance, a large number of vehicle detectors have been deployed in Taipei City. Currently, these detectors provide real-time traffic information, such as average vehicle speed, for the traffic control center. In the future, it is very likely that RSUs will collocate with existing vehicle detectors for getting access to the Internet and power supply.
- If the routing guidance function is enabled, the EV will send a request to the ITS server to ask for a shortest-time path to its destination.
- The EV periodically broadcasts emergency messages when travelling, until it reaches its destination. An emergency message includes information about the EV, such as its type (e.g., ambulance or fire engine), identification code, planned route, current position, and average speed.
- If the path clearing function is enabled, vehicles that receive emergency messages will clear a lane for allowing the EV to quickly pass congested areas.
- If the traffic light preemption function is enabled, the ITS server will control RSUs along the travel route of the EV at appropriate time based on the information sent by the EV.
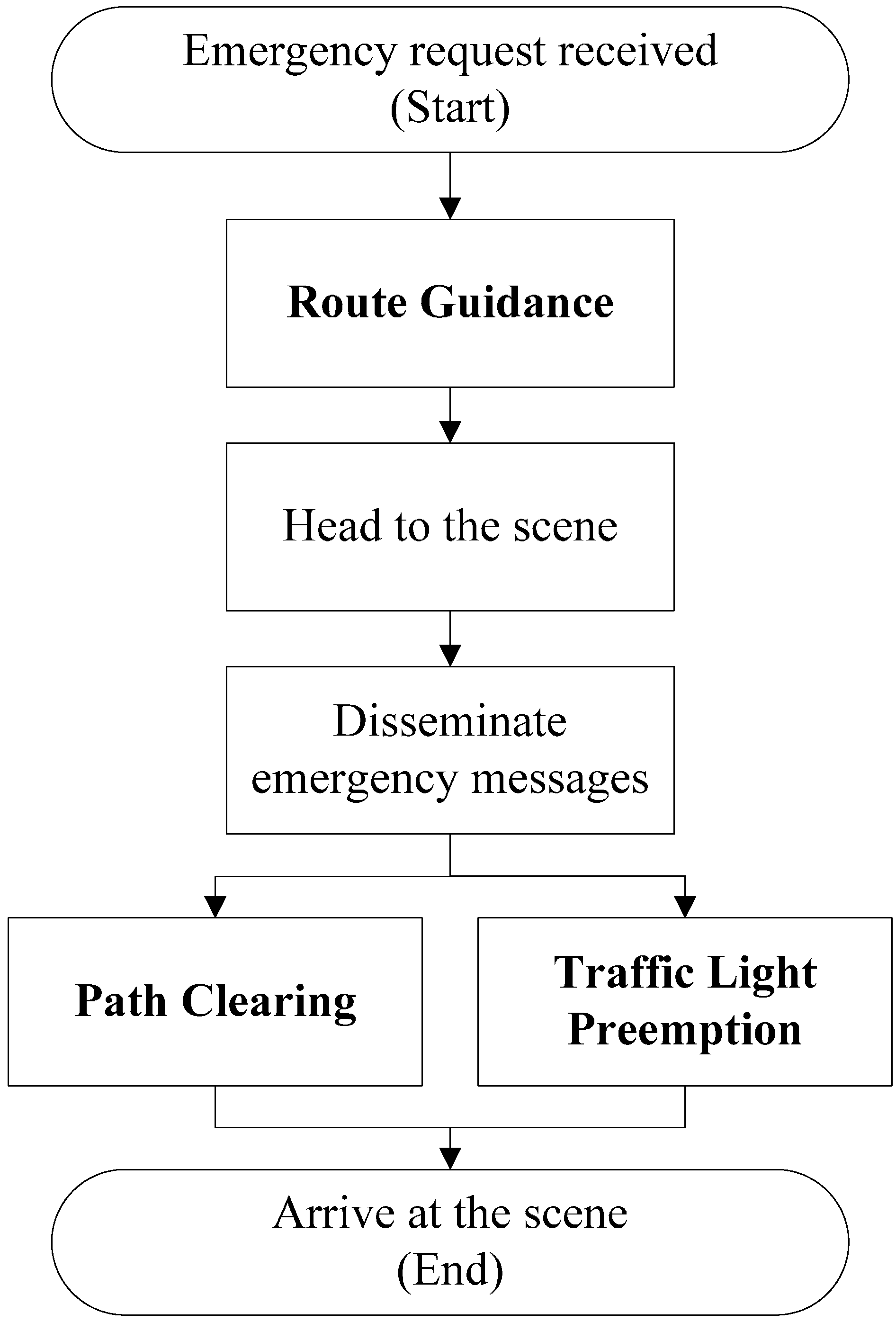
3.2. Route Guidance (RG)
- When an incident occurs, the EV sends information to the ITS server as it departs and asks for route-finding assistance.
- The ITS server uses the location of EV as the starting point and the site of the incident as the endpoint, and then notifies all RSUs within this range.
- After receiving a message, the RSUs start monitoring traffic information and sending data to the ITS server, which uses a shortest-time algorithm, such as A* algorithm [30] or Dijkstra algorithm, to find a travel path for the EV.
- When traveling, the EV regularly broadcasts emergency messages to inform the ITS server of its position. The ITS server then transmits the updated travel path information to the EV.
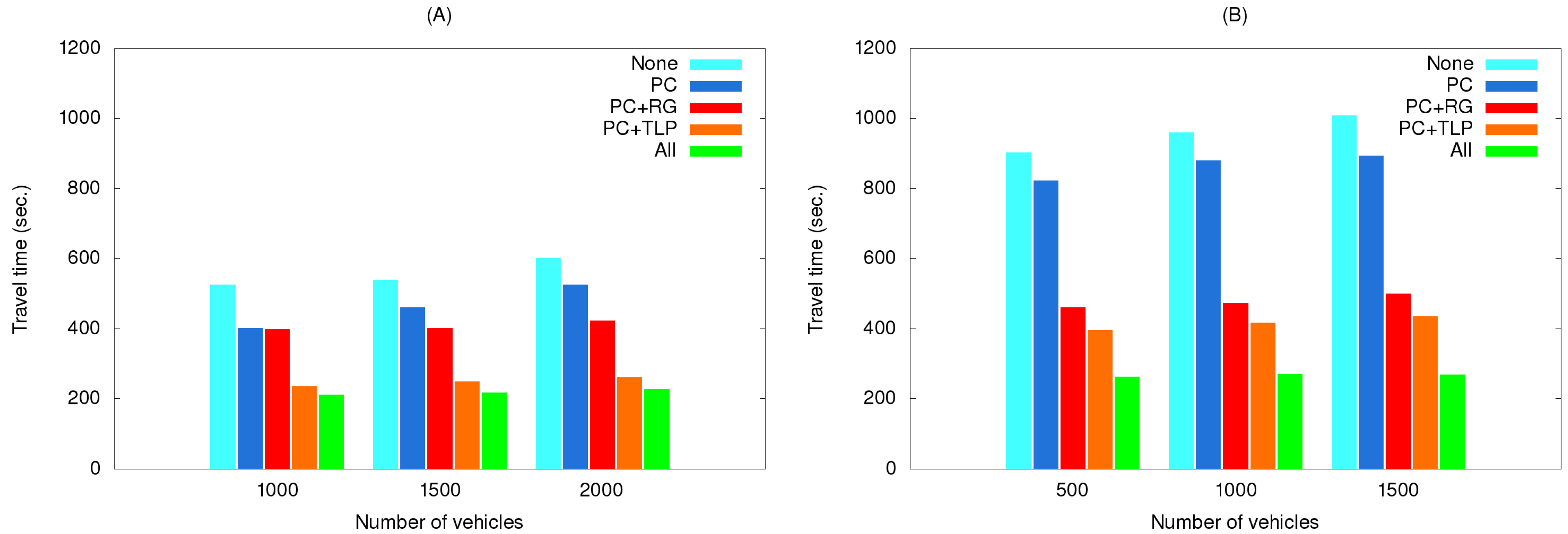
3.3. Traffic Light Preemption (TLP)

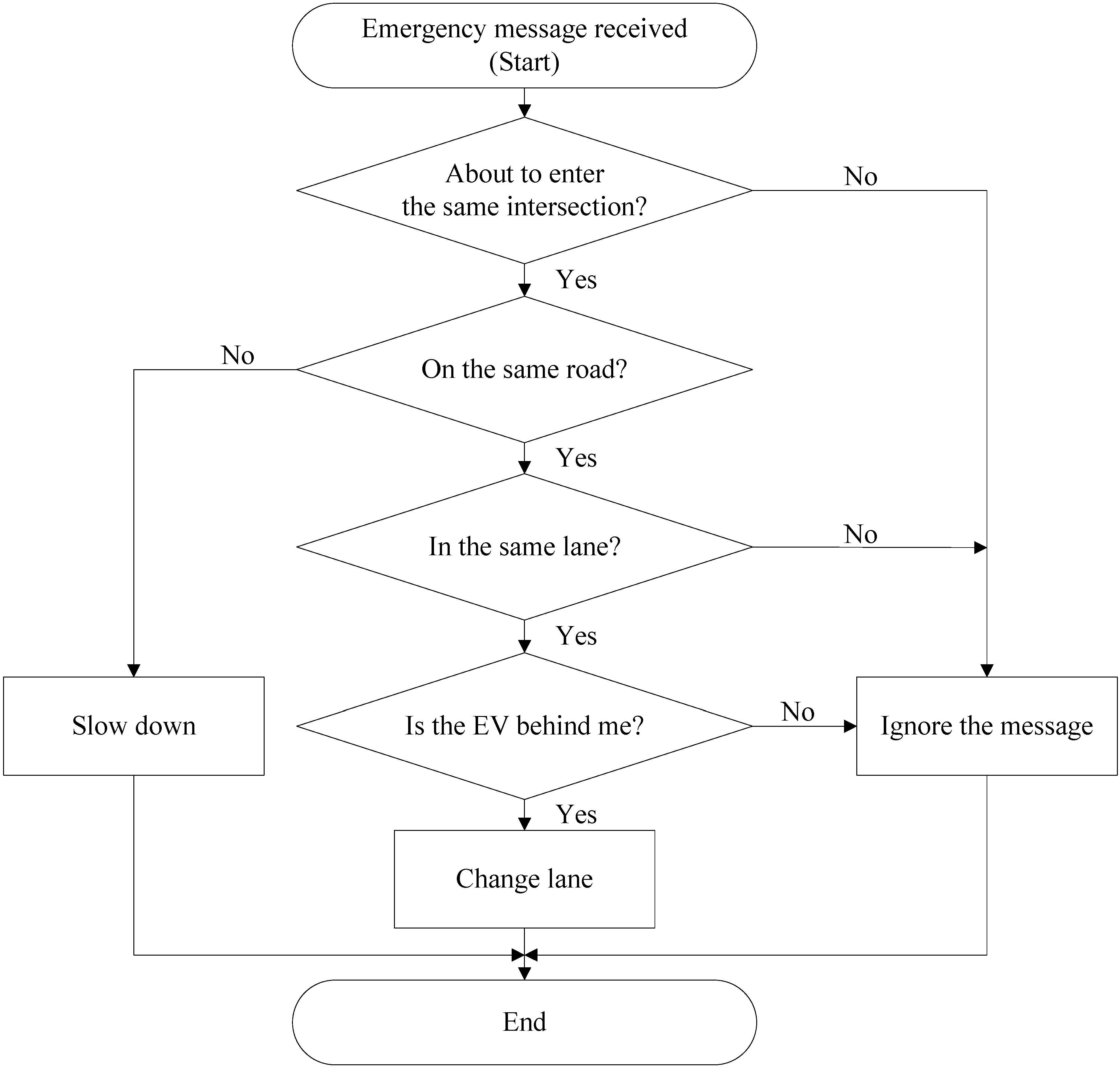
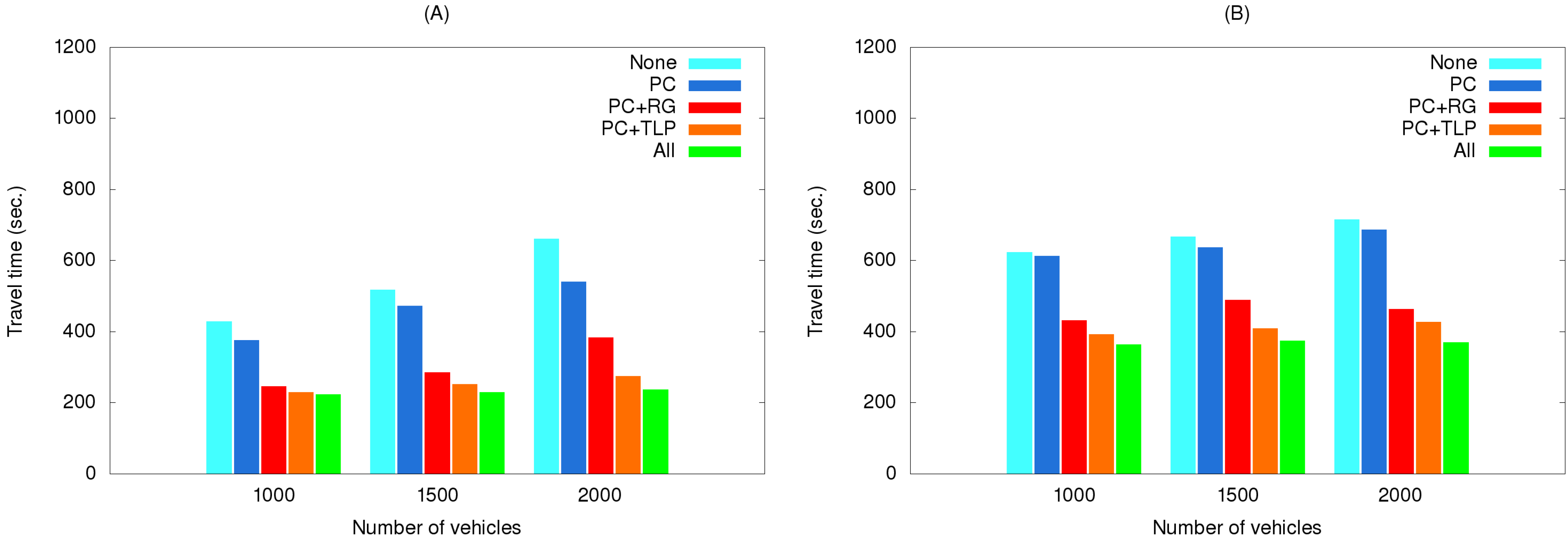
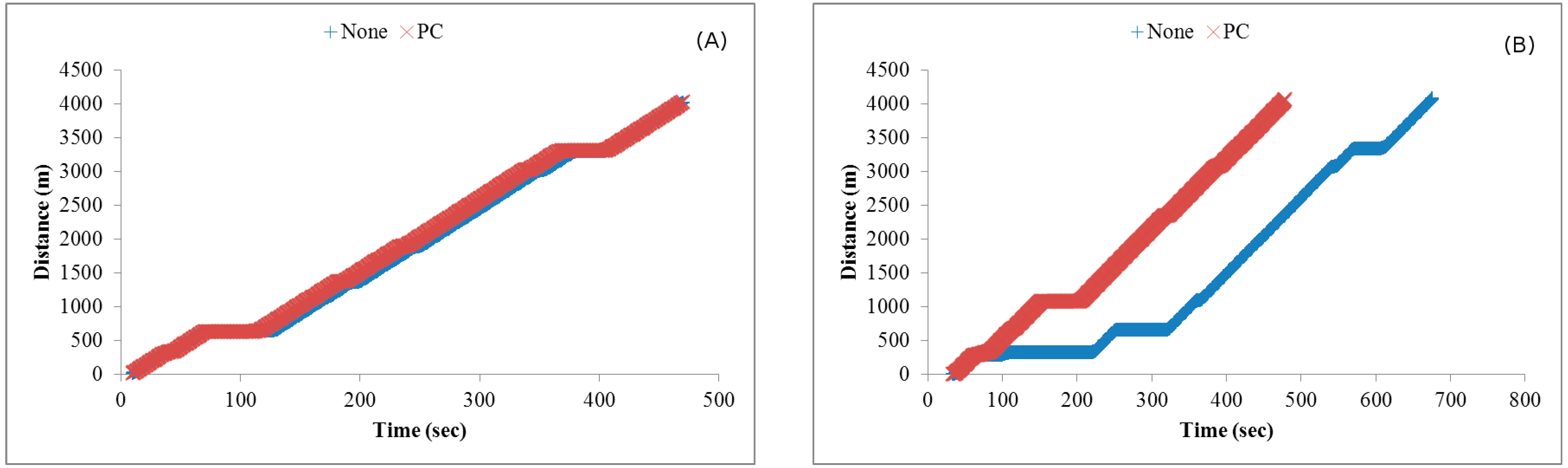
3.4. Path Clearing (PC)
- The unique identification code of the EV.
- The vehicle information (i.e., position, direction, and speed) of the EV.
- The time the emergency message was sent.

4. Performance Evaluation
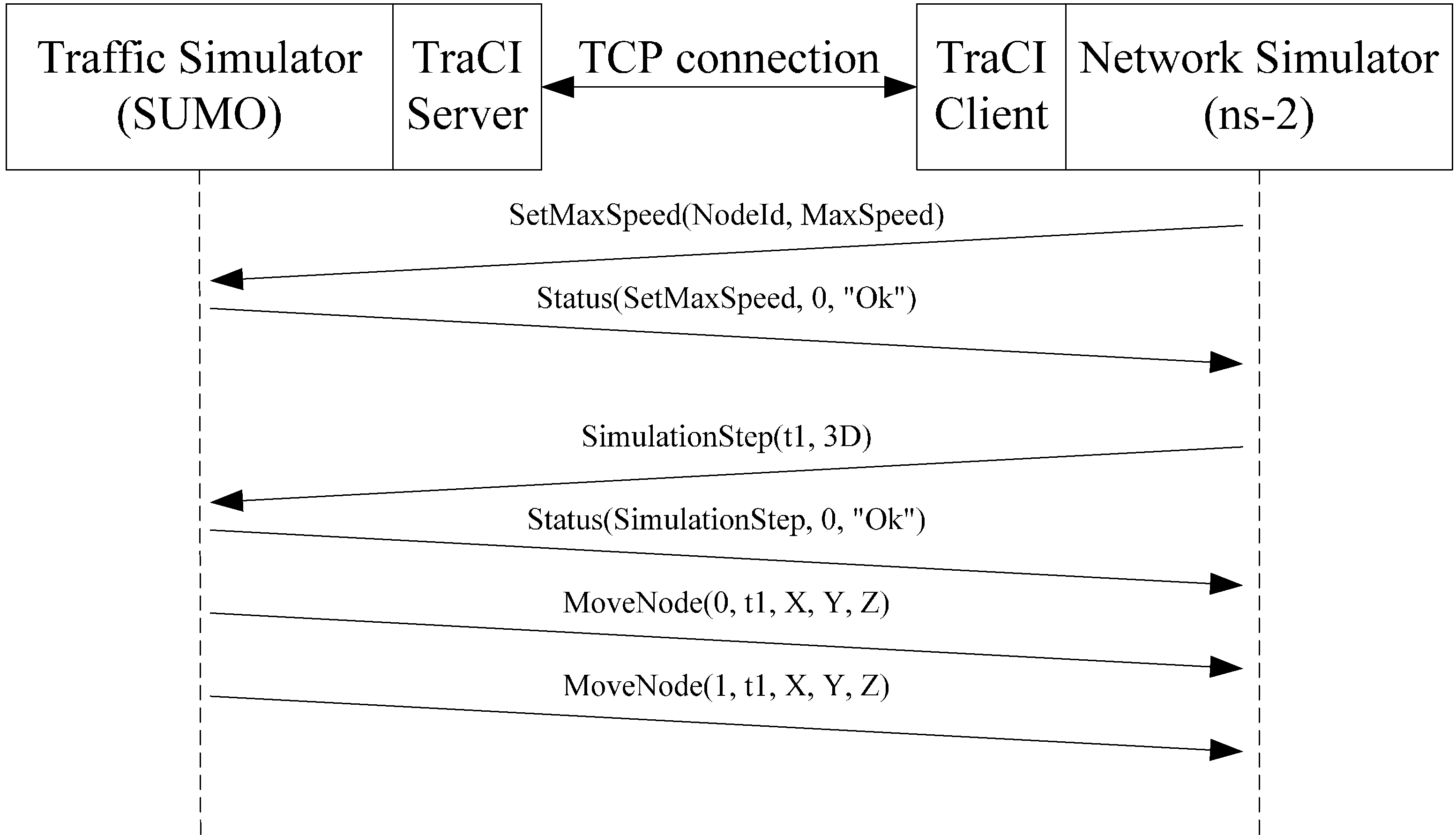
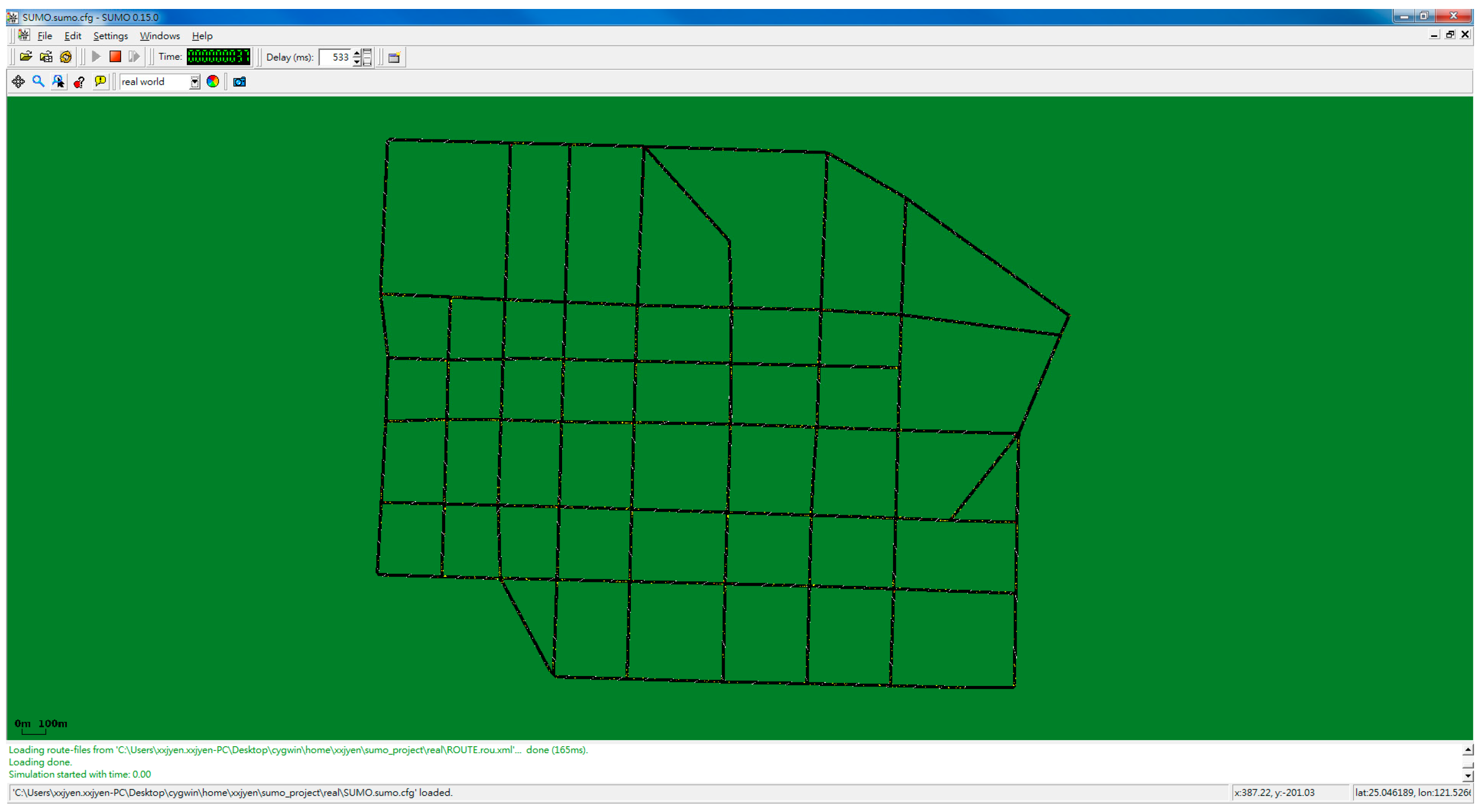
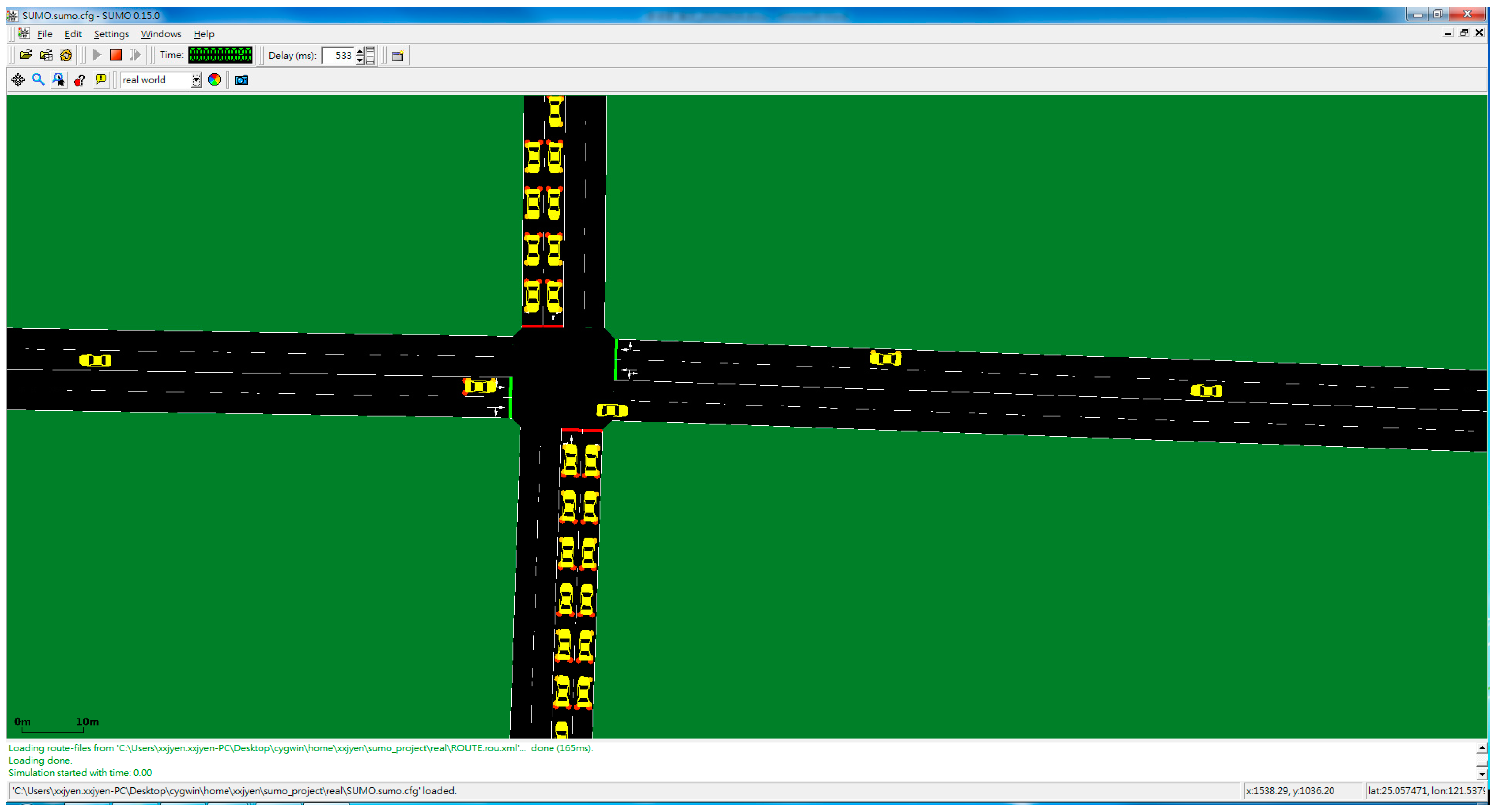
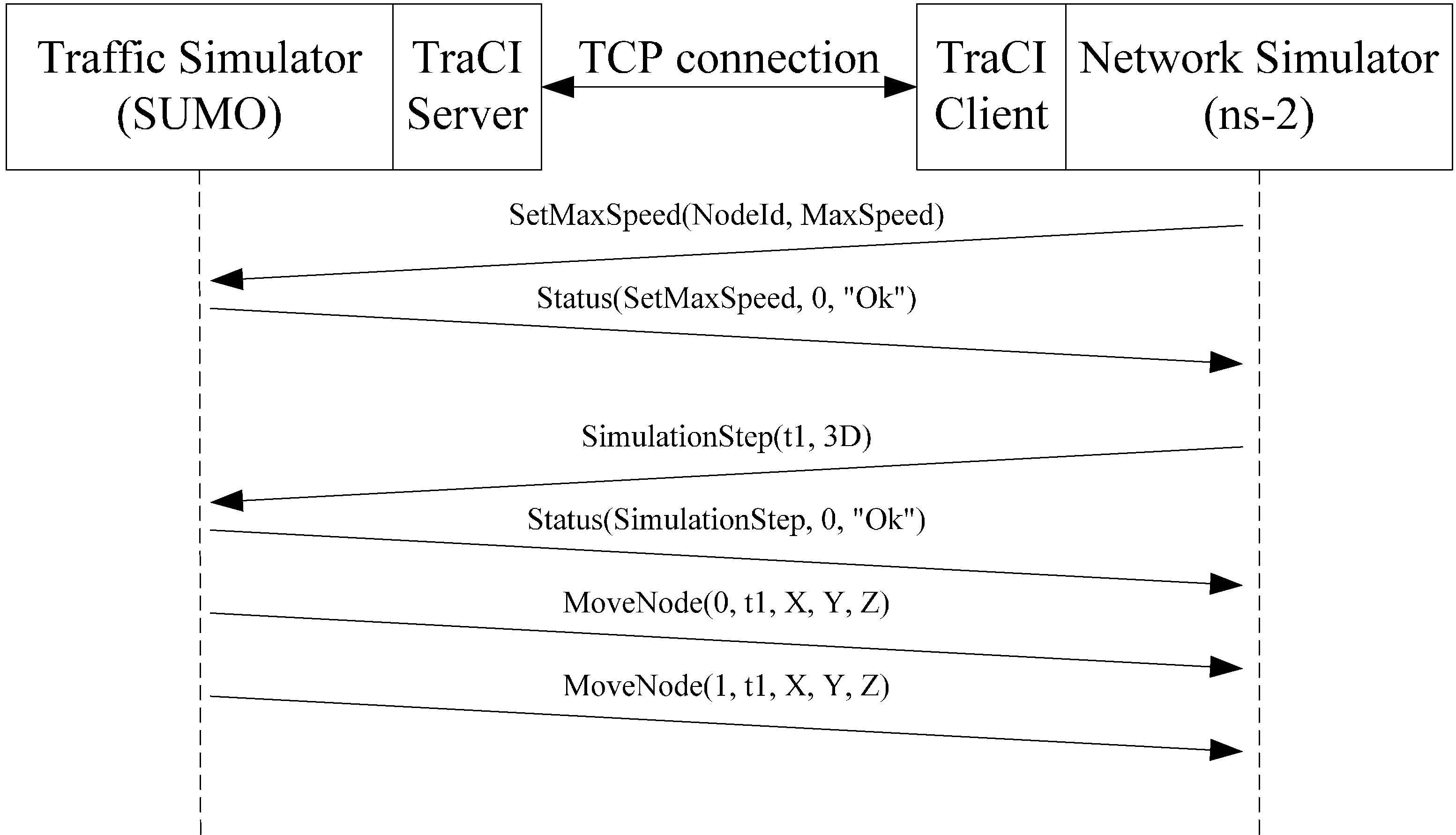
4.1. Simulation Tools
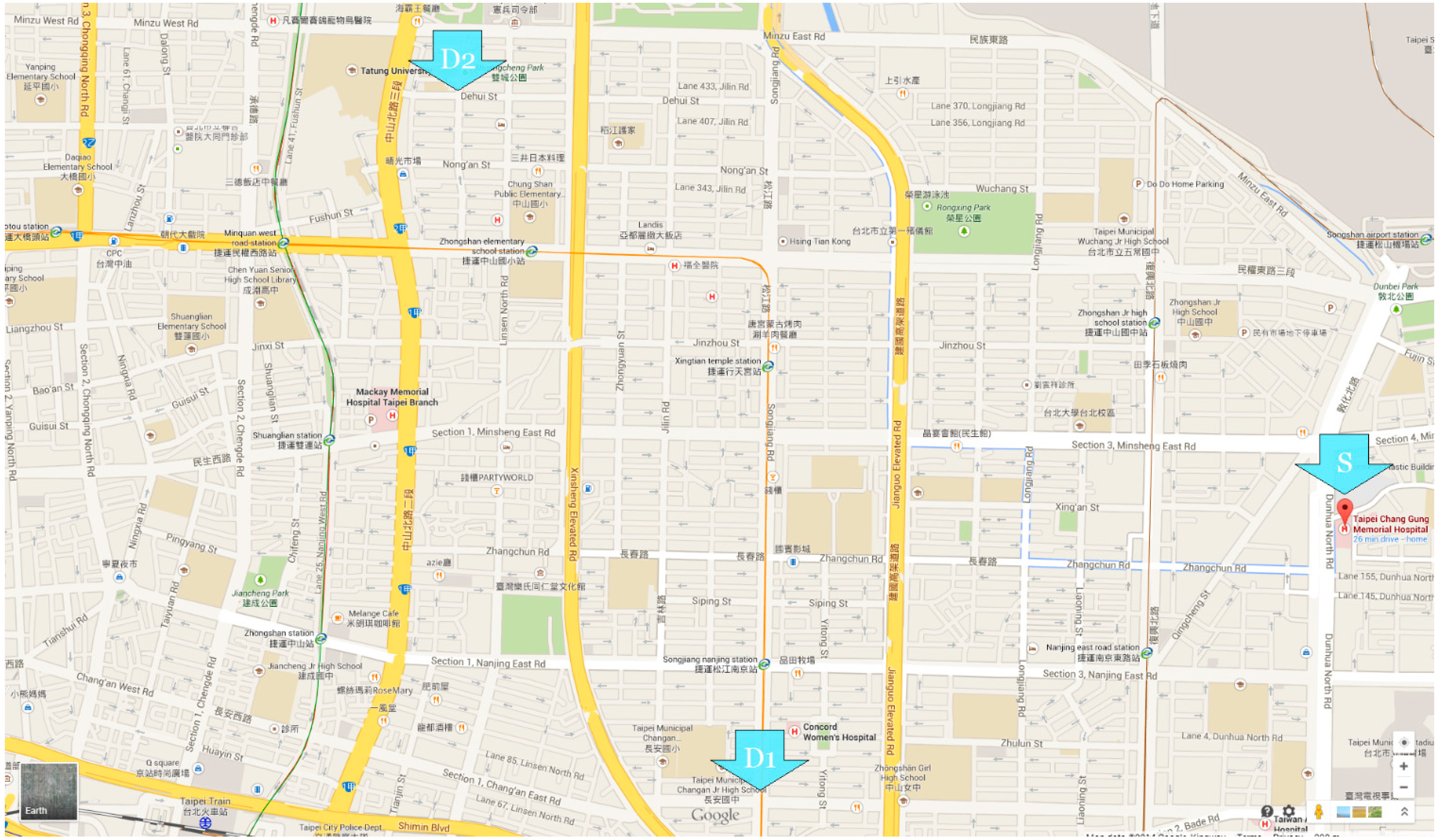
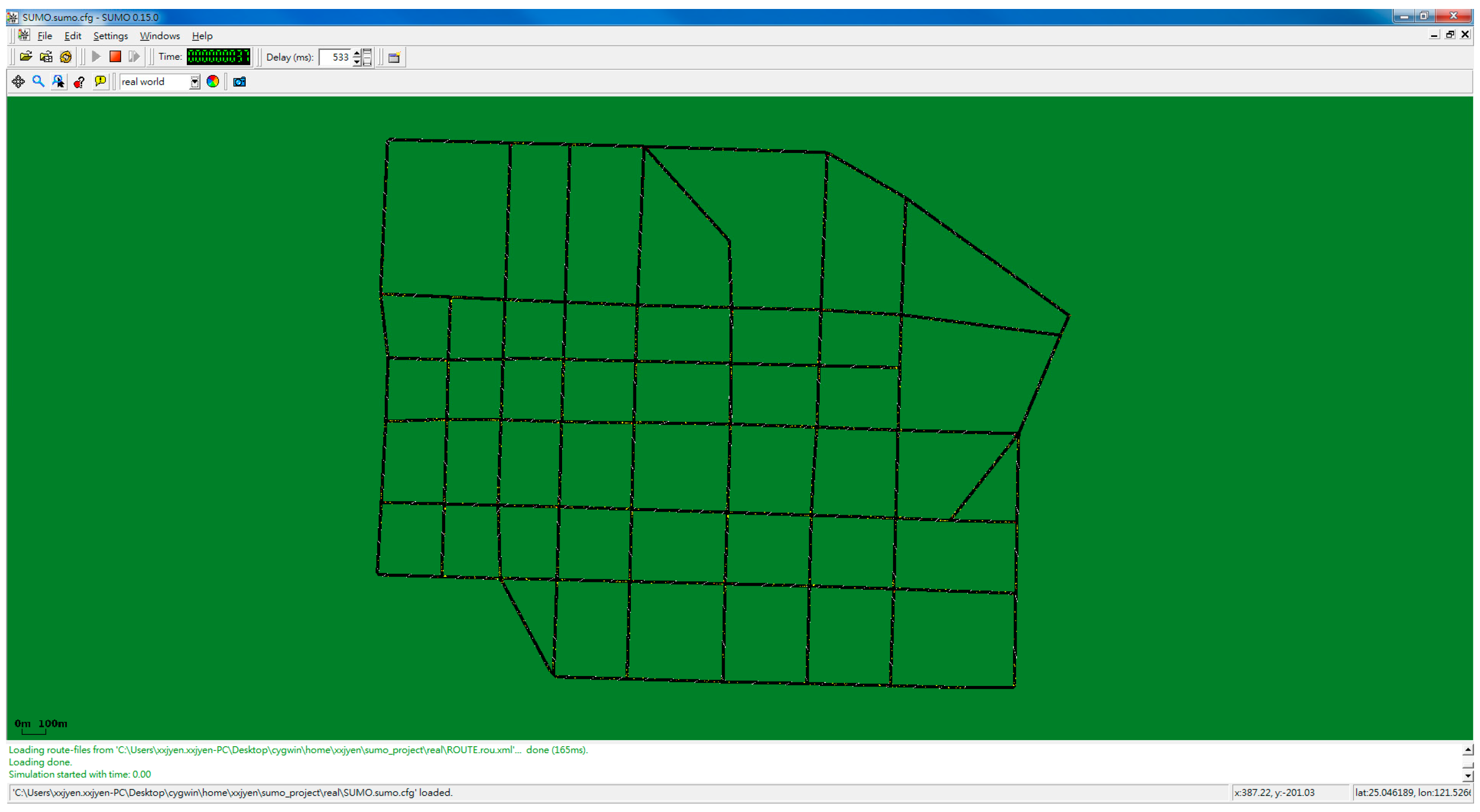
4.2. Simulation Environment


4.3. Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Traffic simulator | SUMO 0.15.0 |
| Area of map | 2300 × 2900 m2 |
| Number of vehicles | 1000, 1500 and 2000 |
| Max. speed | EV: 16.67 m/s (60 km/h) |
| Vehicles: 11.12 m/s (40 km/h) | |
| TLS building options | default |
| Length of routes | Short route: 2000 mLong route: 2900 m |
| Parameter | Value |
|---|---|
| Network simulator | ns-2 v2.34 |
| Radio propagation model | Propagation/TwoRayGround |
| Network interface | Phy/Wireless |
| MAC protocol | IEEE 802.11 DCF |
| Max. transmission range | 250 m |
| Warning packet size | 256 bytes |
| Normal packet size | 512 bytes |
| Packets sent by vehicles | 1 per second |
4.4. Simulation Experiment Design
| Simulation set #1 | |||||
| Item 1 | Item 2 | Item 3 | Item 4 | Item 5 | |
| RG | V | V | V | V | |
| TLP | V | V | |||
| PC | V | V | |||
| Simulation set #2 | |||||
| Item 1 | Item 2 | Item 3 | Item 4 | Item 5 | |
| RG | V | V | |||
| TLP | V | V | V | V | |
| PC | V | V | |||
| Simulation set #3 | |||||
| Item 1 | Item 2 | Item 3 | Item 4 | Item 5 | |
| RG | V | V | |||
| TLP | V | V | |||
| PC | V | V | V | V | |
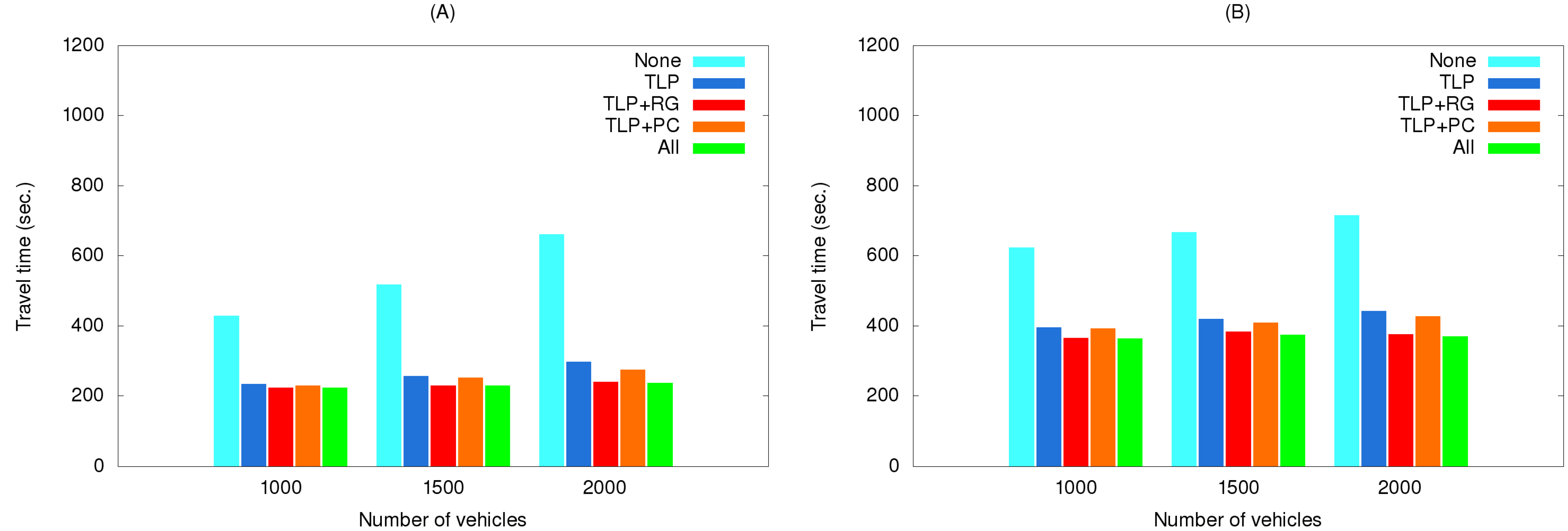
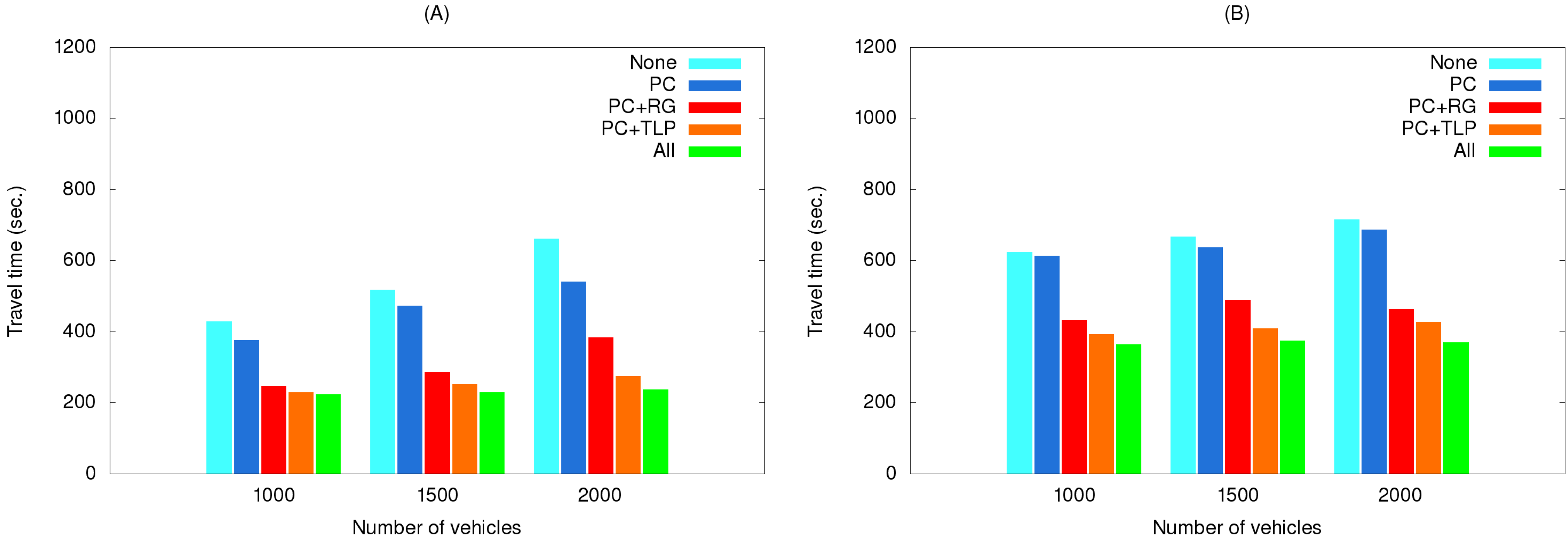
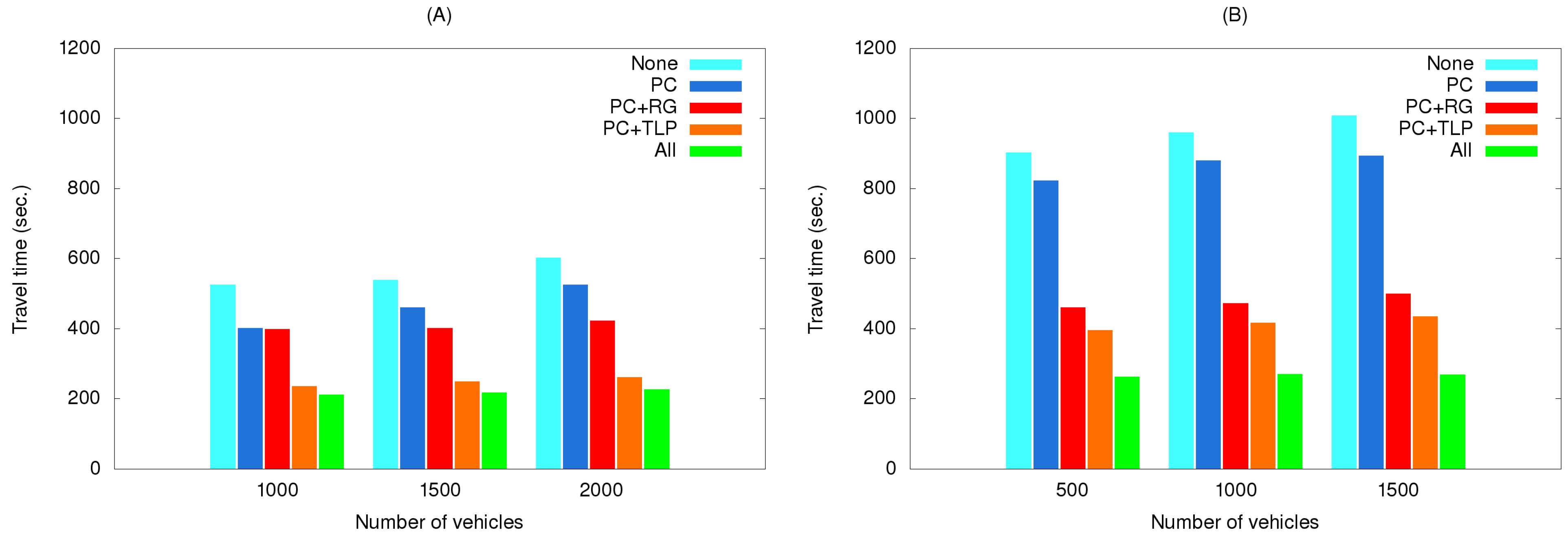
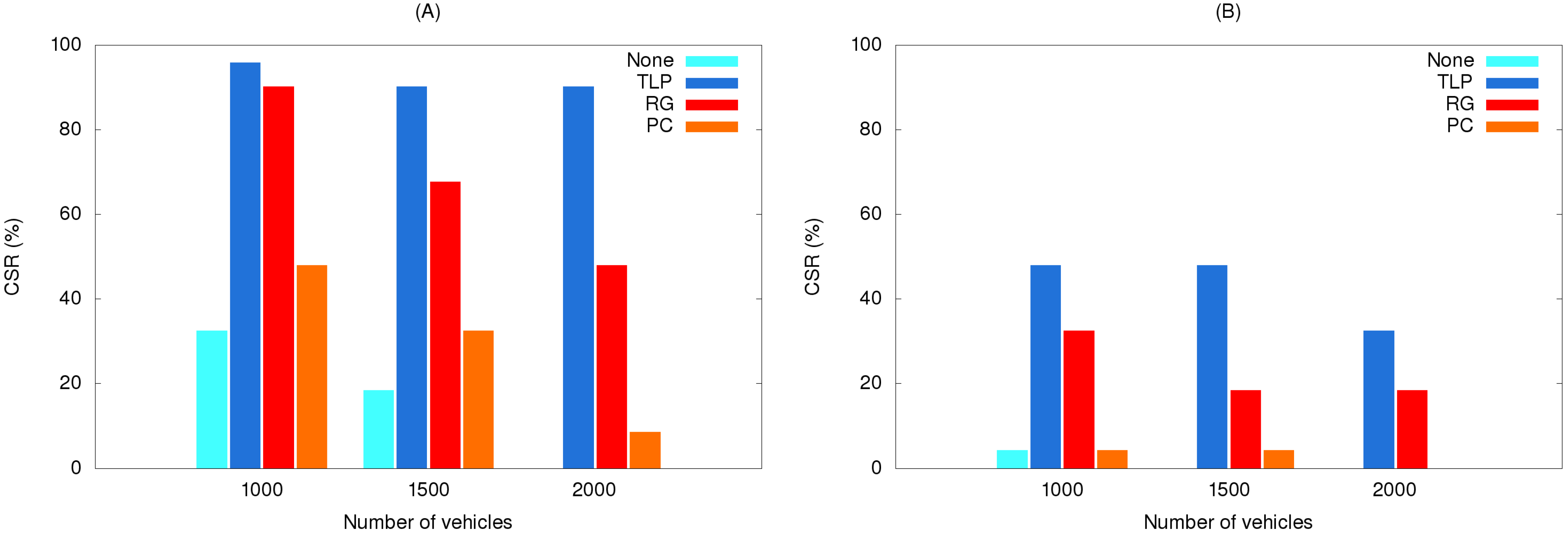
4.5. Simulation Results
4.5.1. Uniform Traffic Settings
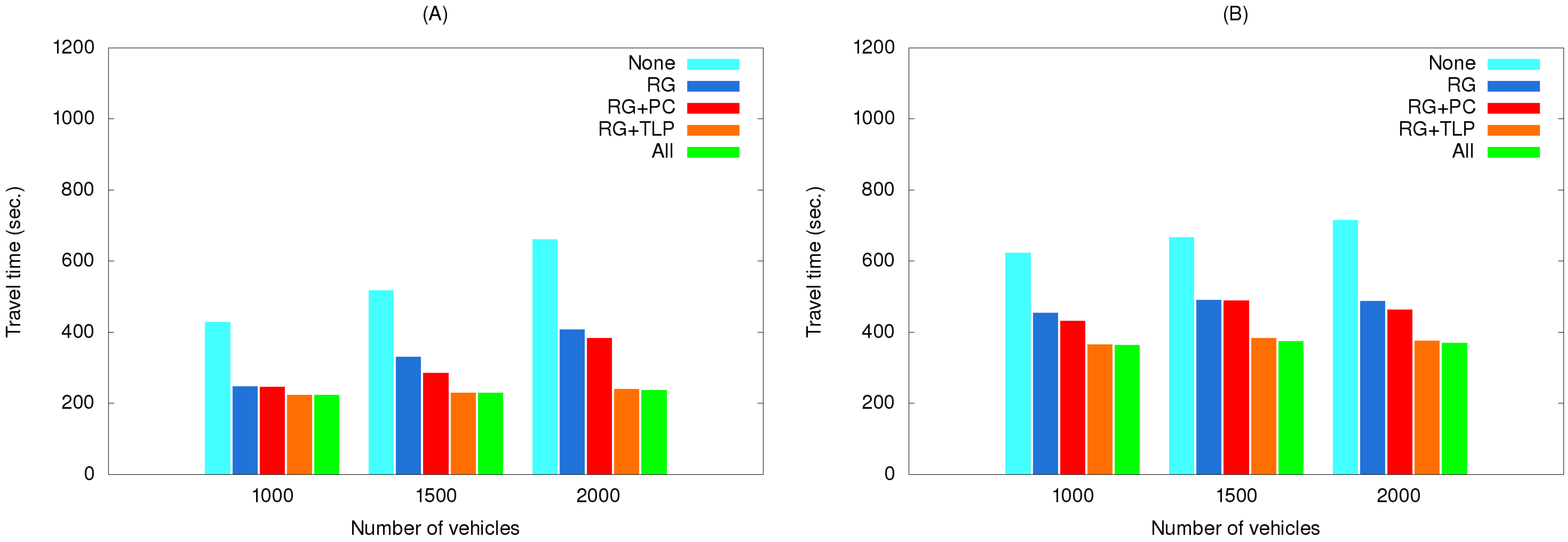
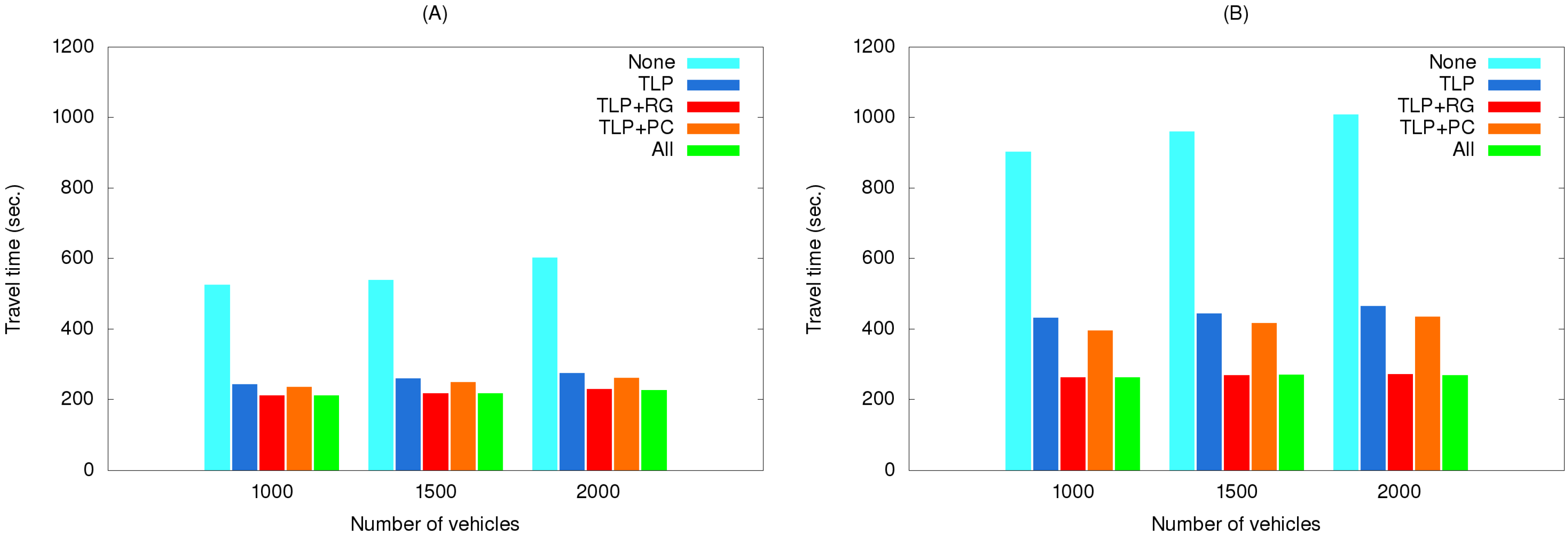
4.5.2. Real Traffic Settings

4.6. Discussion
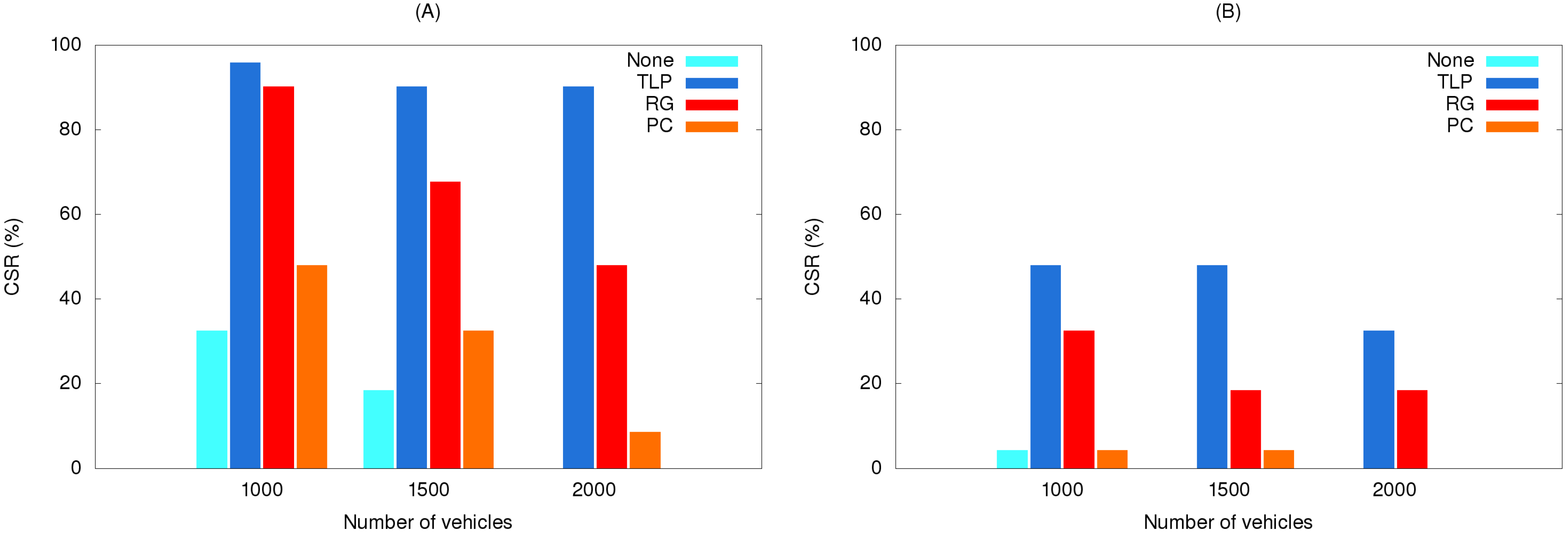
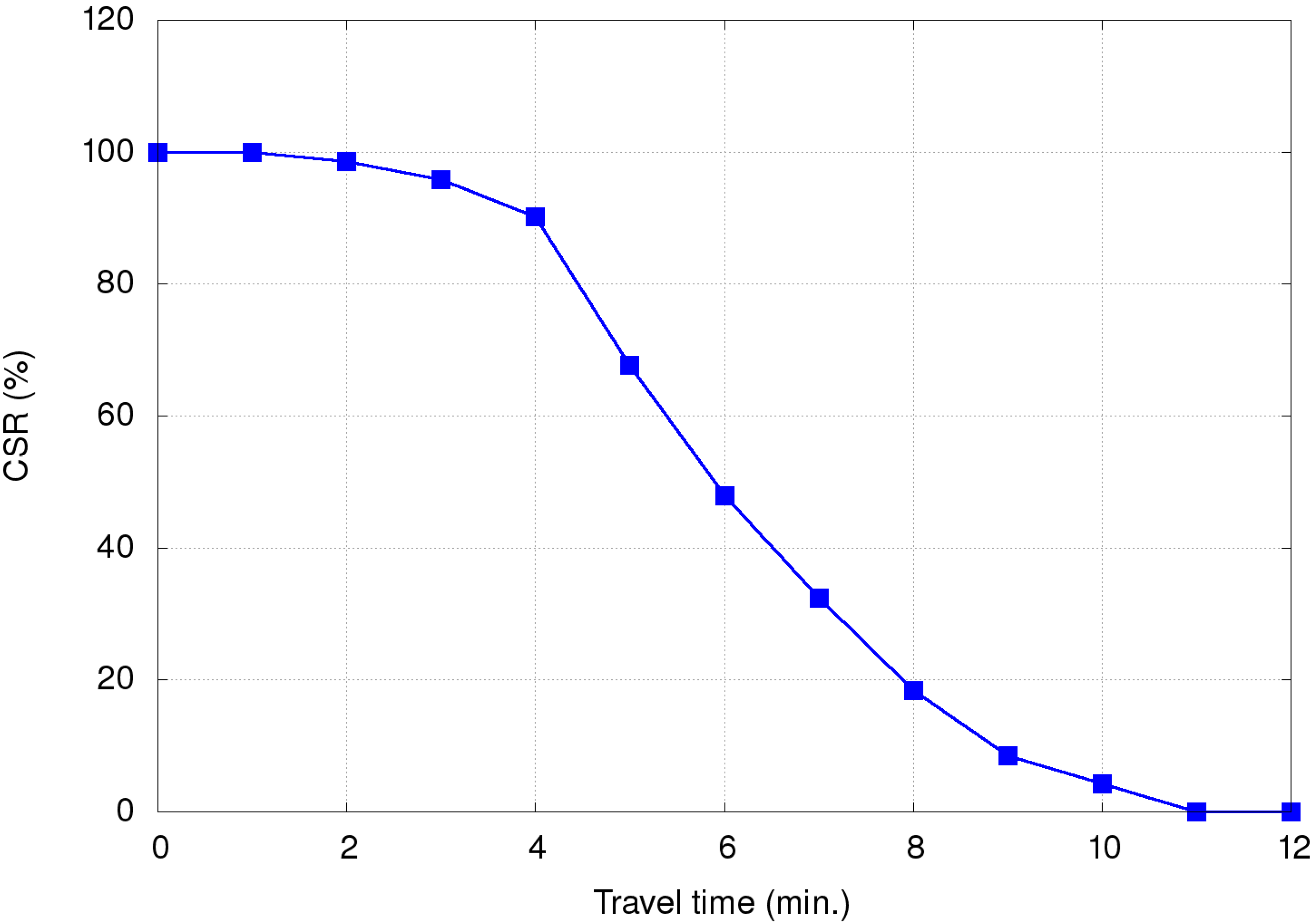
4.6.1. Relationship between Travel Time and Cumulative Survival Ratio (CSR)
 , indicating a CDR of 1.4% if EVs arrive at a specific scene within three minutes. Cumulative survival ratio (CSRi) is calculated as 1-CDRi, with results used to estimate improvements from using each method.
, indicating a CDR of 1.4% if EVs arrive at a specific scene within three minutes. Cumulative survival ratio (CSRi) is calculated as 1-CDRi, with results used to estimate improvements from using each method.| Travel Time (s) | Death | CDR (%) | CSR (%) |
|---|---|---|---|
| 0~59 | 0 | 0 | 100 |
| 60~119 | 0 | 0 | 100 |
| 120~179 | 1 | 1.4 | 98.6 |
| 180~239 | 2 | 4.2 | 95.8 |
| 240~299 | 4 | 9.8 | 90.2 |
| 300~359 | 16 | 32.3 | 67.7 |
| 360~419 | 14 | 52.1 | 47.9 |
| 420~479 | 11 | 67.6 | 32.4 |
| 480~539 | 10 | 81.6 | 18.4 |
| 540~599 | 7 | 91.5 | 8.5 |
| 600~659 | 3 | 95.7 | 4.3 |
| 660~719 | 3 | 100 | 0 |
| 720+ | 0 | 100 | 0 |
4.6.2. Difficulty
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- De Maio, V.J.; Stiell, I.G.; Wells, G.A.; Spaite, D.W. Optimal defibrillation response intervals for maximum out-of-hospital cardiac arrest survival rates. Ann. Emerg. Med. 2003, 42, 242–250. [Google Scholar]
- White, R.D.; Asplin, B.R.; Bugliosi, T.F.; Hankins, D.G. High discharge survival rate after out-of-hospital ventricular fibrillation with rapid defibrillation by police and paramedics. Ann. Emerg. Med. 1996, 28, 480–485. [Google Scholar] [CrossRef]
- White, R.D.; Bunch, T.J.; Hankins, D.G. Evolution of a community-wide early defibrillation programme experience over 13 years using police/fire personnel and paramedics as responders. Resuscitation 2005, 65, 279–283. [Google Scholar] [CrossRef]
- White, R.D.; Hankins, D.G.; Bugliosi, T.F. Seven years’ experience with early defibrillation by police and paramedics in an emergency medical services system. Resuscitation 1998, 39, 145–151. [Google Scholar] [CrossRef]
- Kobusingye, O.C.; Hyder, A.A.; Bishai, D.; Joshipura, M.; Hicks, E.R.; Mock, C. Emergency medical services. In Disease Control Priorities in Developing Countries, 2nd ed.; Jamison, D.T., Breman, J.G., Measham, A.R., Alleyne, G., Claeson, M., Evans, D.B., Jha, P., Mills, A., Musgrove, P., Eds.; Oxford University Press: New York, NY, USA, 2006; pp. 1261–1279. [Google Scholar]
- De Boer, J. An attempt at more accurate estimation of the number of ambulances needed at disasters in The Netherlands. Prehosp. Disaster Med. 1996, 11, 125–129. [Google Scholar]
- Blackwell, T.H.; Kaufman, J.S. Response time effectiveness: Comparison of response time and survival in an urban emergency medical services system. Acad. Emerg. Med. 2002, 9, 288–295. [Google Scholar] [CrossRef]
- Eisenberg, M.S.; Bergner, L.; Hallstrom, A. Cardiac resuscitation in the community. Importance of rapid provision and implications for program planning. JAMA 1979, 241, 1905–1907. [Google Scholar] [CrossRef]
- Pons, P.T.; Haukoos, J.S.; Bludworth, W.; Cribley, T.; Pons, K.A.; Markovchick, V.J. Paramedic response time: Does it affect patient survival? Acad. Emerg. Med. 2005, 12, 594–600. [Google Scholar]
- Sladjana, A.; Gordana, P.; Ana, S. Emergency response time after out-of-hospital cardiac arrest. Eur. J. Intern. Med. 2011, 22, 386–393. [Google Scholar] [CrossRef]
- Rushworth, G.F.; Bloe, C.; Diack, H.L.; Reilly, R.; Murray, C.; Stewart, D.; Leslie, S.J. Pre-hospital ECG e-transmission for patients with suspected myocardial infarction in the highlands of Scotland. Int. J. Environ. Res. Public Health 2014, 11, 2346–2360. [Google Scholar] [CrossRef]
- Sisiopiku, V.P.; Cavusoglu, O. Incident and emergency medical services management from a regional perspective. Int. J. Environ. Res. Public Health 2012, 9, 2266–2282. [Google Scholar] [CrossRef]
- Zeadally, S.; Hunt, R.; Chen, Y.S.; Irwin, A.; Hassan, A. Vehicular Ad Hoc Networks (VANETs): Status, results, and challenges. Telecommun. Syst. 2012, 50, 217–241. [Google Scholar] [CrossRef]
- Martinez, F.J.; Toh, C.-K.; Cano, J.-C.; Calafate, C.T.; Manzoni, P. Emergency services in future intelligent transportation systems based on vehicular communication networks. IEEE Intell. Transport. Syst. Mag. 2010, 2, 6–20. [Google Scholar] [CrossRef]
- Barrachina, J.; Garrido, P.; Fogue, M.; Martinez, F.J.; Cano, J.-C.; Calafate, C.T.; Manzoni, P. Reducing emergency services arrival time by using vehicular communications and evolution strategies. Expert Syst. Appl. 2013, 41, 1206–1217. [Google Scholar] [CrossRef]
- Fogue, M.; Garrido, P.; Martinez, F.J.; Cano, J.-C.; Calafate, C.T.; Manzoni, P. A novel approach for traffic accidents sanitary resource allocation based on multi-objective genetic algorithms. Expert Syst. Appl. 2013, 40, 323–336. [Google Scholar] [CrossRef]
- Fogue, M.; Garrido, P.; Martinez, F.J.; Cano, J.-C.; Calafate, C.T.; Manzoni, P. A system for automatic notification and severity estimation of automotive accidents. IEEE Transact. Mobile Comput. 2014, 13, 948–963. [Google Scholar] [CrossRef]
- Jiang, D.; Delgrossi, L. IEEE 802.11p: Towards an international standard for wireless access in vehicular environments. In Proceedings of Vehicular Technology Conference, Marina Bay, Singapore, 11–14 May 2008.
- IEEE Vehicular Technology Society. IEEE Guide for Wireless Access in Vehicular Environments (WAVE)—Architecture; IEEE Standards Association: Piscataway, NJ, USA, 2014. [Google Scholar]
- IEEE Vehicular Technology Society. Trial-Use Standard for Wireless Access in Vehicular Environments (WAVE)—Resource Manager; IEEE Standards Association: Piscataway, NJ, USA, 2006. [Google Scholar]
- IEEE Vehicular Technology Society. IEEE Trial-Use Standard for Wireless Access in Vehicular Environments—Security Services for Applications and Management Messages; IEEE Standards Association: Piscataway, NJ, USA, 2013. [Google Scholar]
- IEEE Vehicular Technology Society. IEEE Draft Standard for Wireless Access in Vehicular Environments (WAVE)—Networking Services; IEEE Standards Association: Piscataway, NJ, USA, 2010. [Google Scholar]
- IEEE Vehicular Technology Society. IEEE Trail-Use Standard for Wireless Access in Vehicular Environments (WAVE)—Multi-Channel Operation; IEEE Standards Association: Piscataway, NJ, USA, 2011. [Google Scholar]
- IEEE Vehicular Technology Society. IEEE Standard for Wireless Access in Vehicular Environments (WAVE)—Over-the-Air Electronic Payment Data Exchange Protocol for Intelligent Transportation Systems (ITS); IEEE Standards Association: Piscataway, NJ, USA, 2011. [Google Scholar]
- IEEE Vehicular Technology Society. IEEE Draft Standard for Wireless Access in Vehicular Environments (WAVE)—Identifier Allocations; IEEE Standards Association: Piscataway, NJ, USA, 2012. [Google Scholar]
- Rizvi, S.R.; Olariu, S.; Weigle, M.C.; Rizvi, M.E. A novel approach to reduce traffic chaos in emergency and evacuation scenarios. In Proceedings of Vehicular Technology Conference, Dublin, Ireland, 22–25 April 2007.
- Buchenscheit, A.; Schaub, F.; Kargl, F.; Veber, M. A VANET-based emergency vehicle warning system. In Proceedings of Vehicular Technology Conference, Barcelona, Spain, 26–29 April 2009.
- Huang, C.M.; Yang, C.C.; Tseng, C.Y.; Chou, C.H. A centralized traffic control mechanism for evacuation of emergency vehicles using the DSRC protocol. In Proceedings of the 4th International Symposium on Wireless Pervasive Computing, Melbourne, Australia, 11–13 February 2009.
- Vlad, R.C.; Morel, C.; Morel, J.Y.; Vlad, S. A learning real-time routing system for emergency vehicles. In Proceedings of IEEE Internal Conference on Automation, Quality and Testing, Robotics, Cluj-Napoca, Romania, 22–25 May 2008.
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Man. Cybern. 1968, 4, 100–107. [Google Scholar]
- Unibaso, G.; Del Ser, J.; Gil-Lopez, S.; Molinete, B. A novel CAM-based traffic light preemption algorithm for efficient guidance of emergency vehicles. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Funchal-Madeira Island, Portugal, 19–22 September 2010.
- Weng, Y.S.; Huang, Y.S.; Su, S.-F.; Yu, C. Modelling of emergency vehicle preemption systems using statecharts . In Proceedings of IEEE International Conference on System, Man, and Cybernetics, Anchorage, AK, USA, 9–12 October 2011.
- Krajzewicz, D.; Erdmann, J.; Behrisch, M.; Bieker, L. Recent development and applications of SUMO—Simulation of urban mobility. Int. J. Adv. Syst. Manag. 2012, 5, 128–138. [Google Scholar]
- The Network Simulator—ns-2. Available online: http://www.isi.edu/nsnam/ns/ (accessed on 11 October 2014).
- OpenStreetMap. Available online: http://www.openstreetmap.org/ (accessed on 11 October 2014).
- Krauss, S. Towards a unified view of microscopic traffic flow theories. In Proceedings of the IFAC Symposium on Transportation Systems, Chania, Greece, 16–18 June 1997.
- Torrent-Moreno, M. Inter-Vehicle Communications: Achieving Safety in a Distributed Wireless Environment: Challenges, Systems and Protocols. Ph.D. Thesis, Institution of Telematics, Karlsruhe University, Karlsruhe, German, 2007. [Google Scholar]
- Wegener, A.; Piorkowski, M.; Raya, M.; Hellbruck, H.; Fischer, S.; Hubaux, J.P. TraCI: An interface for coupling road traffic and network simulators. In Proceedings of the 11th Communications and Networking Simulation Symposium, Ottawa, ON, Canada, 14–17 April 2008.
- Google Maps. Available online: https://maps.google.com/ (accessed on 11 October 2014).
- Rappaport, T.S. Wireless Communications, Principles and Practice, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002; pp. 85–90. [Google Scholar]
- Traffic Control Center of Taipei City, Taiwan. Available online: http://tms.bote.taipei.gov.tw/ (accessed on 11 October 2014).
- Bohm, A.; Lidstrom, K.; Jonsson, M.; Larsson, T. Evaluating CALM M5-based vehicle-to-vehicle communication in various road settings through field trials. In Proceedings of IEEE 35th Conference on Local Computer Networks, Denver, CO, USA, 10–14 October 2010.
- Sommer, C.; Eckhoff, D.; German, R.; Dressler, F. A computationally inexpensive empirical model of IEEE 802.11p radio shadowing in urban environments. In Proceedings of International Conference on Wireless on-Demand Network Systems and Services (WONS), Bardonecchia, Italy, 26–28 January 2011.
- Martinez, F.J.; Fogue, M.; Toh, C.-K.; Cano, J.-C.; Calafate, C.T.; Manzoni, P. Computer simulations of VANETs using realistic city topologies. Wirel. Pers. Commun. 2013, 69, 639–663. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, C.-L.; Huang, C.-Y.; Hsiao, T.-C.; Wu, C.-Y.; Chen, Y.-C.; Wang, I.-C. Impact of Vehicular Networks on Emergency Medical Services in Urban Areas. Int. J. Environ. Res. Public Health 2014, 11, 11348-11370. https://doi.org/10.3390/ijerph111111348
Lee C-L, Huang C-Y, Hsiao T-C, Wu C-Y, Chen Y-C, Wang I-C. Impact of Vehicular Networks on Emergency Medical Services in Urban Areas. International Journal of Environmental Research and Public Health. 2014; 11(11):11348-11370. https://doi.org/10.3390/ijerph111111348
Chicago/Turabian StyleLee, Chun-Liang, Chung-Yuan Huang, Tzu-Chien Hsiao, Chun-Yen Wu, Yaw-Chung Chen, and I.-Cheng Wang. 2014. "Impact of Vehicular Networks on Emergency Medical Services in Urban Areas" International Journal of Environmental Research and Public Health 11, no. 11: 11348-11370. https://doi.org/10.3390/ijerph111111348