Energy Balanced Strategies for Maximizing the Lifetime of Sparsely Deployed Underwater Acoustic Sensor Networks



Abstract
:1. Introduction
- We have theoretically analyzed the energy balanced consumption of individual nodes in a linear sensor network for both shallow and deep water.
- We proposed two different energy balanced strategies: EBH and DIB to maximize the lifetime of sparsely deployed UWA-SNs.
2. Network Model and Underwater Acoustic Propagation
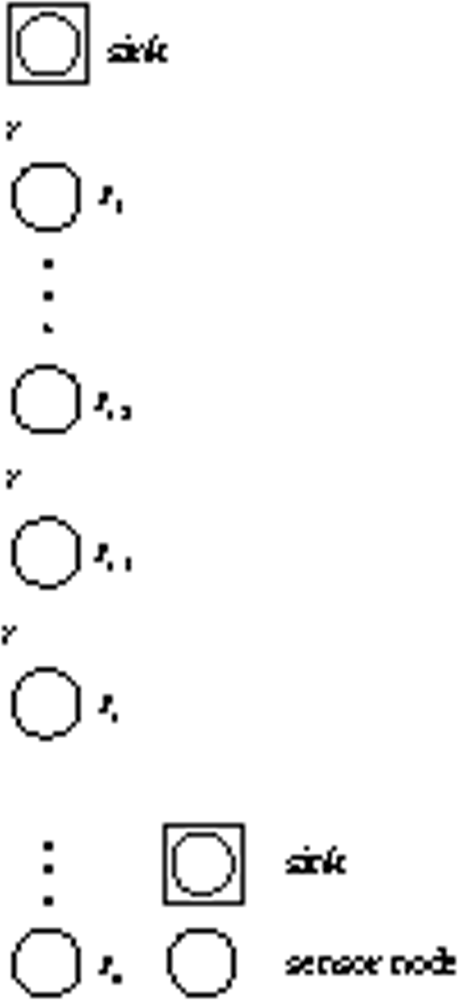
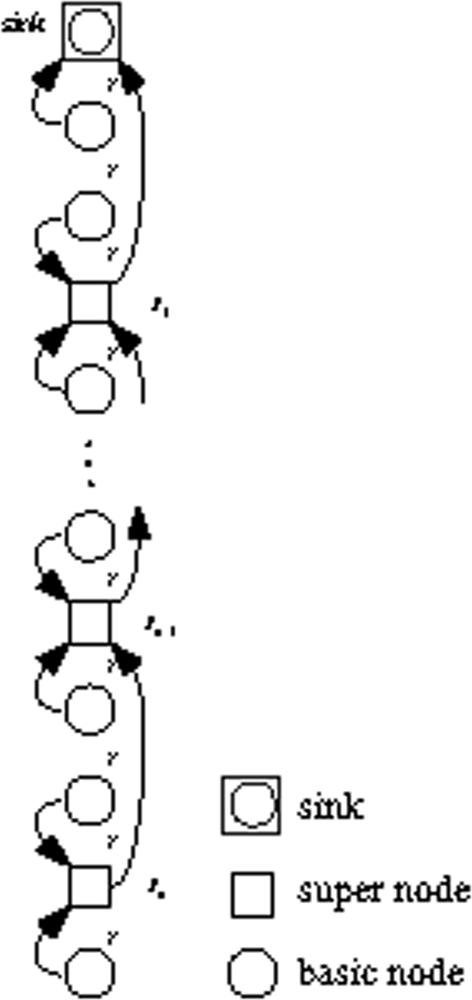
2.1. Network model
2.2. Underwater acoustic propagation
The passive sonar equation
Transmission loss
Transmission power
3. The Reasons of the Unbalanced Energy Consumption
4. Energy Balanced Strategies for Sparsely Deployed UWA-SNs
4.1. EBH: an energy balanced hybrid data propagation algorithm
Overview of EBH
Optimum gradation number of linear network
EBH algorithm

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1: | procedure NodeInitialization |
| 2: | Mode ← MODE0 |
| 3: | EnergyUnit ← E/m |
| 4: | ResidualEnergyGradeNumber ← m |
| 5: | return TRUE |
| 6: | end procedure |
| 7: | procedure NeighborFindingMessageReceived |
| 8: | DownStreamNeighbor = NeighborFindingMessage.id |
| 9: | SendNeighborFindingACK.id = idOfItself |
| 10: | SendNeighborF indingACK() |
| 11: | NeighborFindingMessage.id = idOfItself |
| 12: | SendNeighborFindingMessage() |
| 13: | return TRUE |
| 14: | end procedure |
| 15: | procedure SendNeighborFindingACKReceived |
| 16: | UpStreamNeighbor = SendNeighborFindingACK.id |
| 17: | return TRUE |
| 18: | end procedure |
| 19: | procedure OneUnitEnergyConsumed |
| 20: | SendControlMessage() |
| 21: | if Mode = MODE1 then |
| 22: | Mode = MODE0 |
| 23: | end if |
| 24: | return TRUE |
| 25: | end procedure |
| 26: | procedure ControlMessageReceived |
| 27: | if ResidualEnergyGradeN > ControlMessage.ResidualEnergyGradeN and Mode = MODE0 then |
| 28: | Mode = MODE1 |
| 29: | else |
| 30: | SendControlMessage() |
| 31: | end if |
| 32: | return TRUE |
| 33: | end procedure |
| 34: | procedure SendControlMessage |
| 35: | SendResidualEnergyNumber() |
| 36: | return TRUE |
| 37: | end procedure |
4.2. DIB: differential initial battery assignment strategy
The energy consumption of individual nodes
Battery assignment analysis
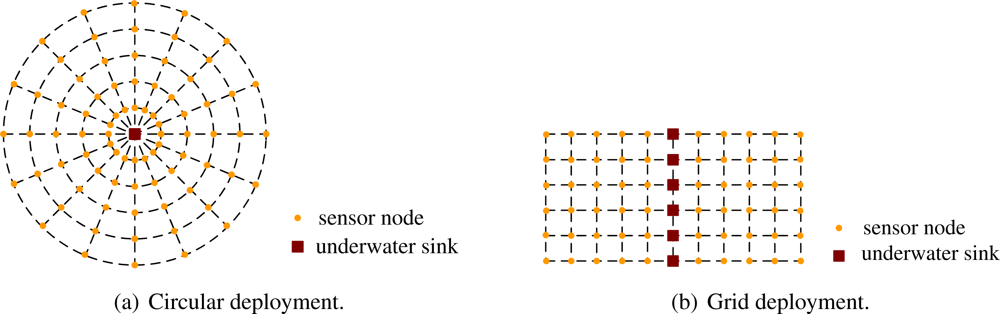
4.3. Apply the linear network to two-dimensional underwater sensor networks
5. Simulation Results
5.1. Simulations of Distance vs Energy Consumption
5.2. Simulations of algorithm EBH
5.3. Simulations of DIB
6. Related Work
7. Conclusions and Future Work
Acknowledgments
References and Notes
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: research challenges. Ad-Hoc Netw 2005, 3, 257–279. [Google Scholar]
- Heidemann, J.; Ye, W.; Wills, J.; Syed, A.; Li, Y. Research challenges and applications for underwater sensor networking. Proceedings of WCNC 2006, Las Vegas, NV, USA, April 3–6, 2006; pp. 228–235.
- Partan, J.; Kurose, J.; Levine, B.N. A Survey of practical issues in underwater networks. Proceedings of WUWNet’06, Los Angeles, CA, USA, 2006; pp. 17–24.
- Akyildiz, I.; Pompili, D.; Melodia, T. State-of-the-art in protocol research for underwater acoustic sensor networks. ACM Sigmobile Mobile Comput. Commun. Rev 2007, 11, 11–22. [Google Scholar]
- Rice, J.; Green, D. Underwater acoustic communications and networks for the US Navy’s seaweb program. Proceedings of SENSORCOMM’08, Cap Esterel, August 25–31, 2008; pp. 715–722.
- Li, J.; Mohapatra, P. Analytical modeling and mitigation techniques for the energy hole problem in sensor networks. Perv. Mob. Comput 2007, 3, 233–254. [Google Scholar]
- Powell, O.; Leone, P.; Rolim, J. Energy optimal data propagation in wireless sensor networks. J. Paral. Distrib. Comput 2007, 67, 302–317. [Google Scholar]
- Guo, W.; Liu, Z.; Wu, G. An energy-balanced transmission scheme for sensor networks. the 1st International Conference on Embedded Networked Sensor Systems, Embedded networked sensor systems, SenSys 2003, New York, NY, USA; 2003; pp. 2332–2336. [Google Scholar]
- Wu, X.; Chen, G.; Das, S. On the energy hole problem of nonuniform node distribution in wireless sensor networks. Proceedings of 2006 IEEE International Conference on Mobile Adhoc and Sensor Systems, Vancouver, BC, USA, October, 2006; pp. 180–187.
- Harris, A.F., III; Stojanovic, M.; Zorzi, M. When underwater acoustic nodes should sleep with one eye open idle-time power management in underwater senosr networks. Proceedings of the 1st ACM international workshop on Underwater networks, Los Angeles, CA, USA; 2006; pp. 105–108. [Google Scholar]
- Syed, A.; Ye, W.; Heidemann, J. T-Lohi: A new class of MAC protocols for underwater acoustic sensor networks. Proceedings of INFOCOM’08, Phoenix, AZ, USA, April 13–18, 2008; pp. 231–235.
- WHOI:Micro-Modem Overview. Available online: http://acomms.whoi.edu/umodem/ (Accessed on 11 June 2009).
- Efthymiou, C.; Nikoletseas, S.; Rolim, J. Energy balanced data propagation in wireless sensor networks. Wireless Netw 2006, 12, 691–707. [Google Scholar]
- Olariu, S.; Stojmenovic, I. Design guidelines for maximizing lifetime and avoiding energy holes in sensor networks with uniform distribution and uniform reporting. Proceedings of INFOCOM 2006, Barcelona, Spain, April, 2006; pp. 1–12.
- Jurdak, R.; Lopes, C.; Baldi, P. Battery lifetime estimation and optimization for underwater sensor networks. In IEEE Sensor Network Operations; Wiley-IEEE Press: Hoboken, NJ, USA, 2006; pp. 397–420. [Google Scholar]
- Domingo, M.; Prior, R. Energy analysis of routing protocols for underwater wireless sensor networks. Comput. Commun 2007, 31, 1227–1238. [Google Scholar]
- Harris, A.; Stojanovic, M.; Zorzi, M. Idle-time energy savings through wake-up modes in underwater acoustic networks. Ad Hoc Netw 2009, 7, 770–777. [Google Scholar]
- Howe, B.; McGinnis, T.; Boyd, M. Sensor network infrastructure: moorings, mobile platforms, and integrated acoustics. Proceedings of Underwater Technology 2007, Tokyo, JP, April 17–20, 2007; pp. 47–51.
- Benson, B.; Chang, G.; Manov, D.; Graham, B.; Kastner, R. Design of a low-cost acoustic modem for moored oceanographic applications. Proceedings of the 1st ACM international workshop on Underwater networks, Los Angeles, CA, USA, 2006; pp. 71–78.
- Ephremides, A. Energy concerns in wireless networks. IEEE Wireless Commun 2002, 9, 48–59. [Google Scholar]
- Chang, J.; Tassiulas, L. Maximum lifetime routing in wireless sensor networks. IEEE/ACM Trans. Networking 2004, 12, 609–619. [Google Scholar]
- Urick, R. Principles of underwater sound; McGraw-Hill Book Company: New York, NY, USA, 1983. [Google Scholar]
- Rajagopalan, R; Varshney, P. Data-aggregation techniques in sensor networks: a survey. IEEE Commun. Surv. Tutorials 2006, 8, 48–63. [Google Scholar]
- Stojanovic, M. On the relationship between capacity and distance in an underwater acoustic communication channel. Proceedings of the 1st ACM international workshop on Underwater networks, Los Angeles, CA, USA; 2006; pp. 41–47. [Google Scholar]
- Etter, P. Underwater Acoustic Modeling and Simulation; Taylor & Francis: London, UK, 2003. [Google Scholar]
- Kinser, L.; Frey, A.; Coppens, A.; Sanders, J. Fundamentals of Acoustics; John Wiley & Sons Inc: Hoboken, NJ, USA, 2000. [Google Scholar]
- Jornet, J.; Stojanovic, M. Distributed power control for underwater acoustic networks. Proceeding of IEEE Oceans 2008, Quebec City, Canada, September, 2008; pp. 21–27.
- Zorzi, M.; Casari, P.; Baldo, N.; Harris, A, III. Energy-efficient routing schemes for underwater acoustic networks. IEEE J. Sel. Areas Commun 2008, 26, 1754–1766. [Google Scholar]
- Hong, L.; Hong, F.; Guo, Z.; Yang, X. A TDMA-Based MAC protocol in underwater sensor networks. Proceeding of WiCOM’08, Dalian, China, October 12–14, 2008; pp. 1–4.
- Tan, H.; Seah, W. Distributed CDMA-based MAC protocol for underwater sensor networks. 32nd IEEE Conference on Local Computer Networks 2007, Dublin, Ireland, October 15–18, 2007; pp. 26–36.
- Freitag, L.; Stojanovic, M.; Grund, M.; Singh, S. Acoustic communications for regional undersea observatories. Proceedings of Oceanology International 2002, London, UK, March 5–8, 2002; pp. 10–20.
- Wang, S.; Tan, M. Research on architecture for reconfigurable underwater sensor networks. Proceedings of IEEE Networking,Sensing and Control 2005, Tucson, AZ, USA, March 19–22, 2005; pp. 831–834.
- Open-Ocean-Moorings. http://www.sontek.com/pdf/expdes/Argonaut-MD-Expanded-Description.pdf (Accessed on 11 June 2009).
- Howitt, I.; Wang, J. Energy balanced chain in distributed sensor networks. Proceedings of WCNC 2004, Atlanta, GA, USA, March 21–25, 2004; pp. 1721–1726.
- Heinzelman, W.; Chandrakasan, A.; Balakrishnan, H.; MIT, C. Energy-efficient communication protocol for wireless microsensor networks. Proceedings of the 33rd Annual Hawaii International Conference on System Sciences 2000, Maui, Hawaii, USA, January 4–7, 2000; pp. 10–20.
- Younis, M.; Youssef, M.; Arisha, K. Energy-aware routing in cluster-based sensor networks. Proceeding of MASCOTS 2002, Fort Worth, TX, USA, 2002; pp. 129–136.
- Singh, M.; Prasanna, V. Energy-optimal and energy-balanced sorting in a single-hop wireless sensor network. Proceeding of PERCOM 2003, Fort Worth, TX, USA, March 23–26, 2003; pp. 50–60.

















© 2009 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Luo, H.; Guo, Z.; Wu, K.; Hong, F.; Feng, Y. Energy Balanced Strategies for Maximizing the Lifetime of Sparsely Deployed Underwater Acoustic Sensor Networks. Sensors 2009, 9, 6626-6651. https://doi.org/10.3390/s90906626
Luo H, Guo Z, Wu K, Hong F, Feng Y. Energy Balanced Strategies for Maximizing the Lifetime of Sparsely Deployed Underwater Acoustic Sensor Networks. Sensors. 2009; 9(9):6626-6651. https://doi.org/10.3390/s90906626
Chicago/Turabian StyleLuo, Hanjiang, Zhongwen Guo, Kaishun Wu, Feng Hong, and Yuan Feng. 2009. "Energy Balanced Strategies for Maximizing the Lifetime of Sparsely Deployed Underwater Acoustic Sensor Networks" Sensors 9, no. 9: 6626-6651. https://doi.org/10.3390/s90906626