Application-Based Production and Testing of a Core–Sheath Fiber Strain Sensor for Wearable Electronics: Feasibility Study of Using the Sensors in Measuring Tri-Axial Trunk Motion Angles


Abstract
:1. Introduction
2. Materials and Methods
2.1. General Materials and Methods
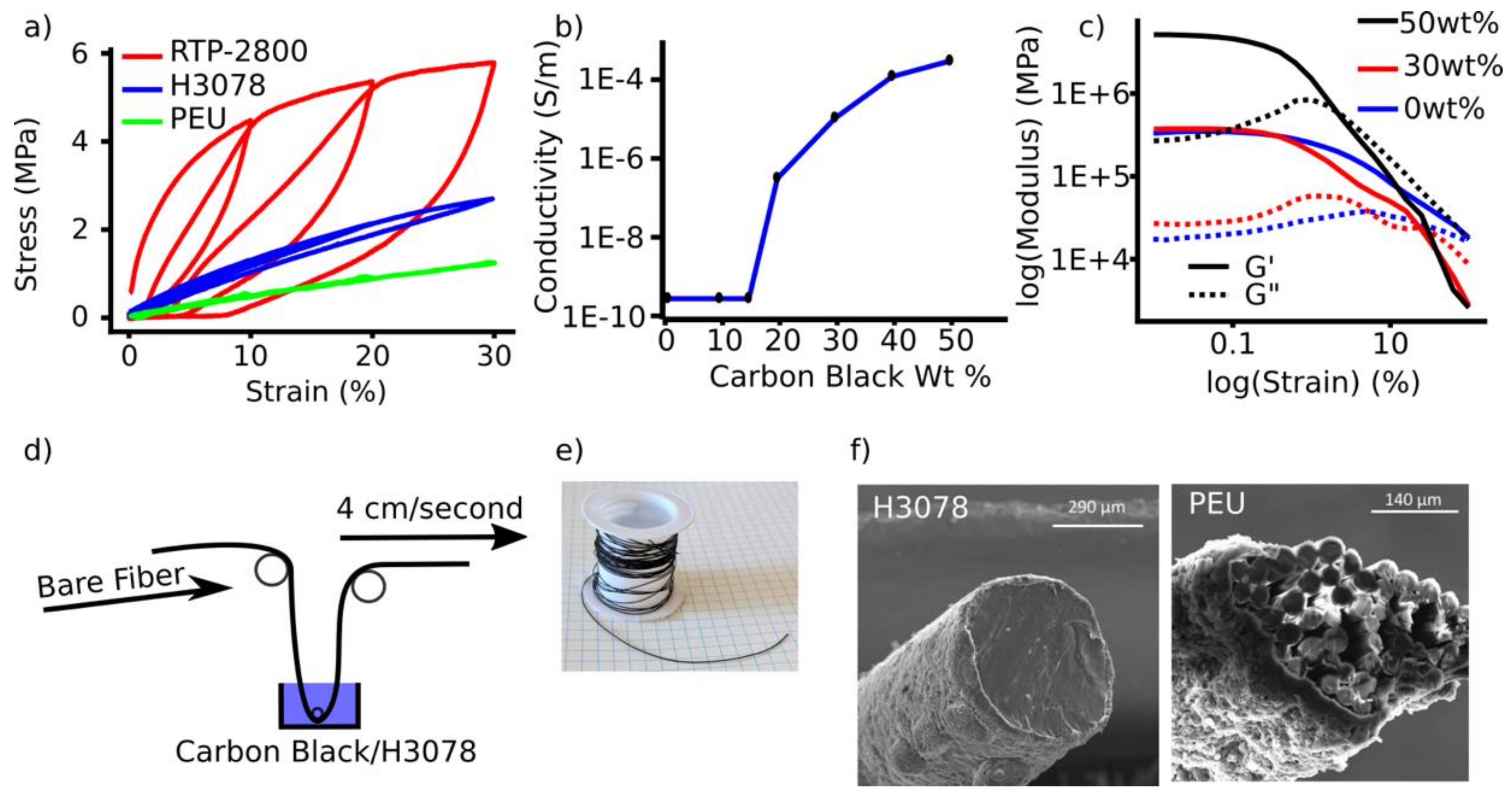
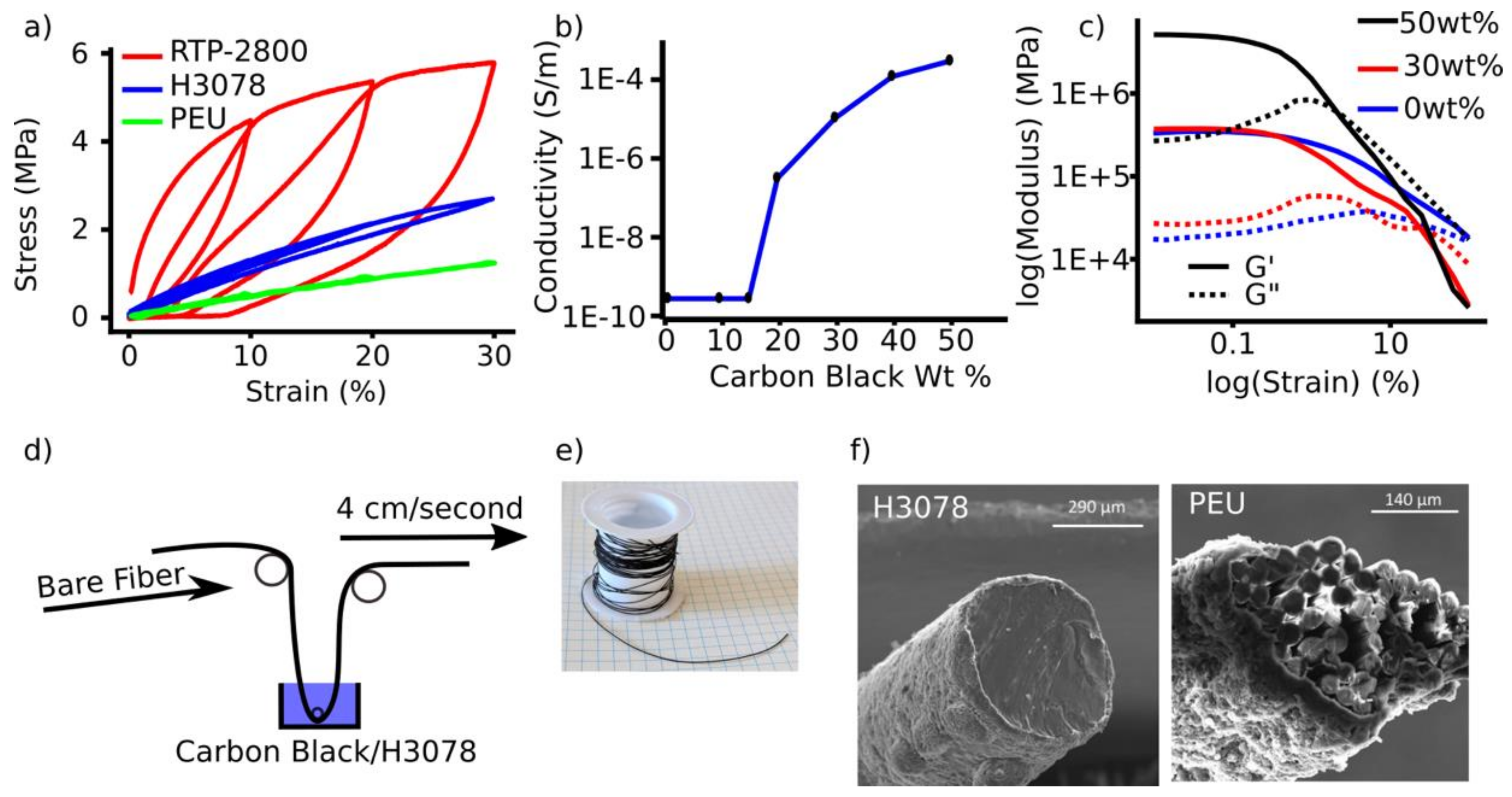
2.2. Percolation Threshold for H3078 and Carbon Black
2.3. Sensor Production
2.3.1. H3078 Coated with H3078:Carbon Black (50 wt%)
2.3.2. PEU Coated with H3078:Carbon Black (50 wt%)
2.4. Linear Stage (Tensile and Electronic) Setup and Testing
2.4.1. Random Wave Pattern Testing
2.4.2. Normalized Root Mean Squared Error (NRMSE) Analysis
2.4.3. Method for Random Forest Machine Learning Algorithm Analysis (RFMLA)
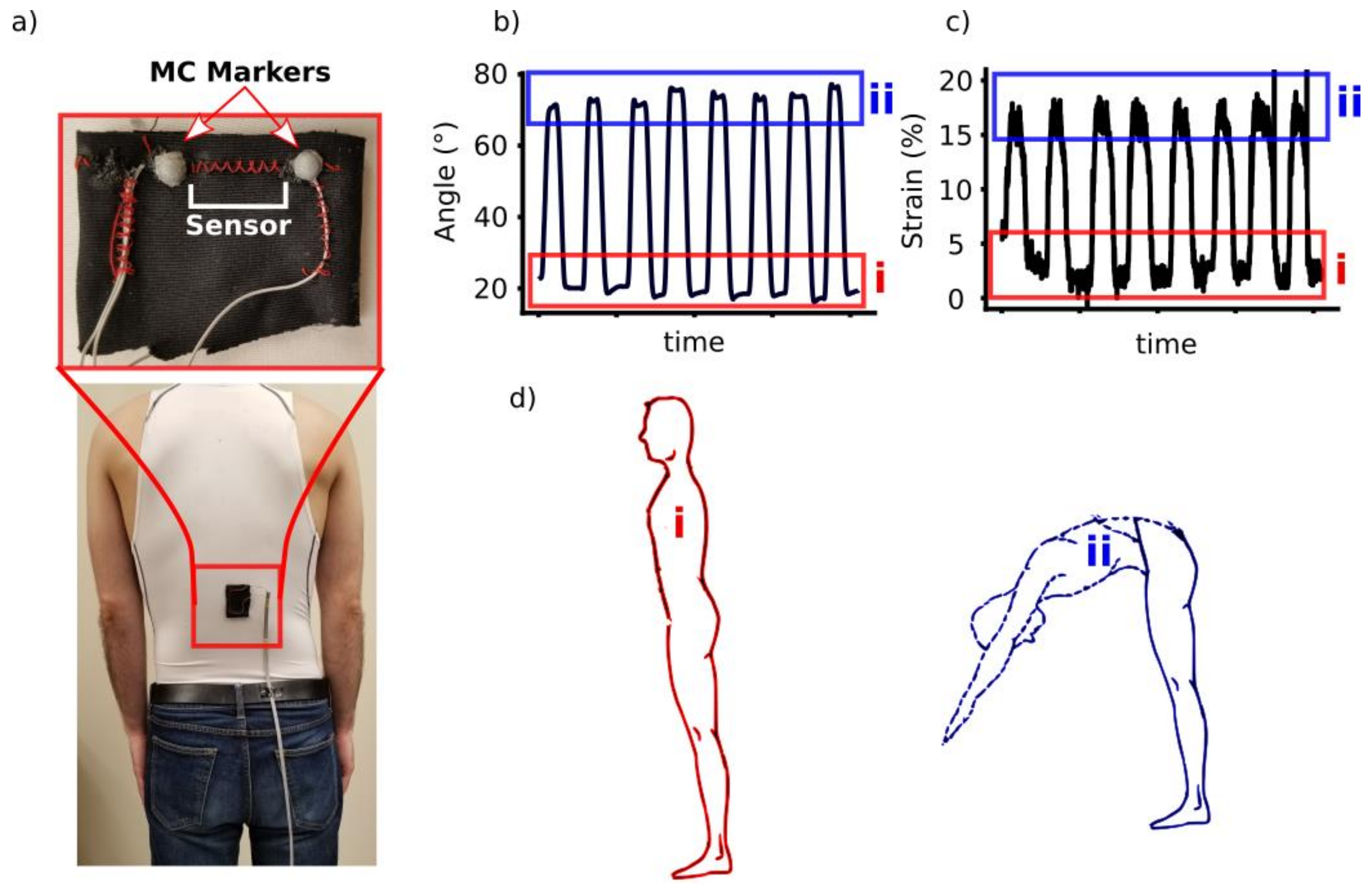
2.5. Method for Real Application Strain Range Calculation
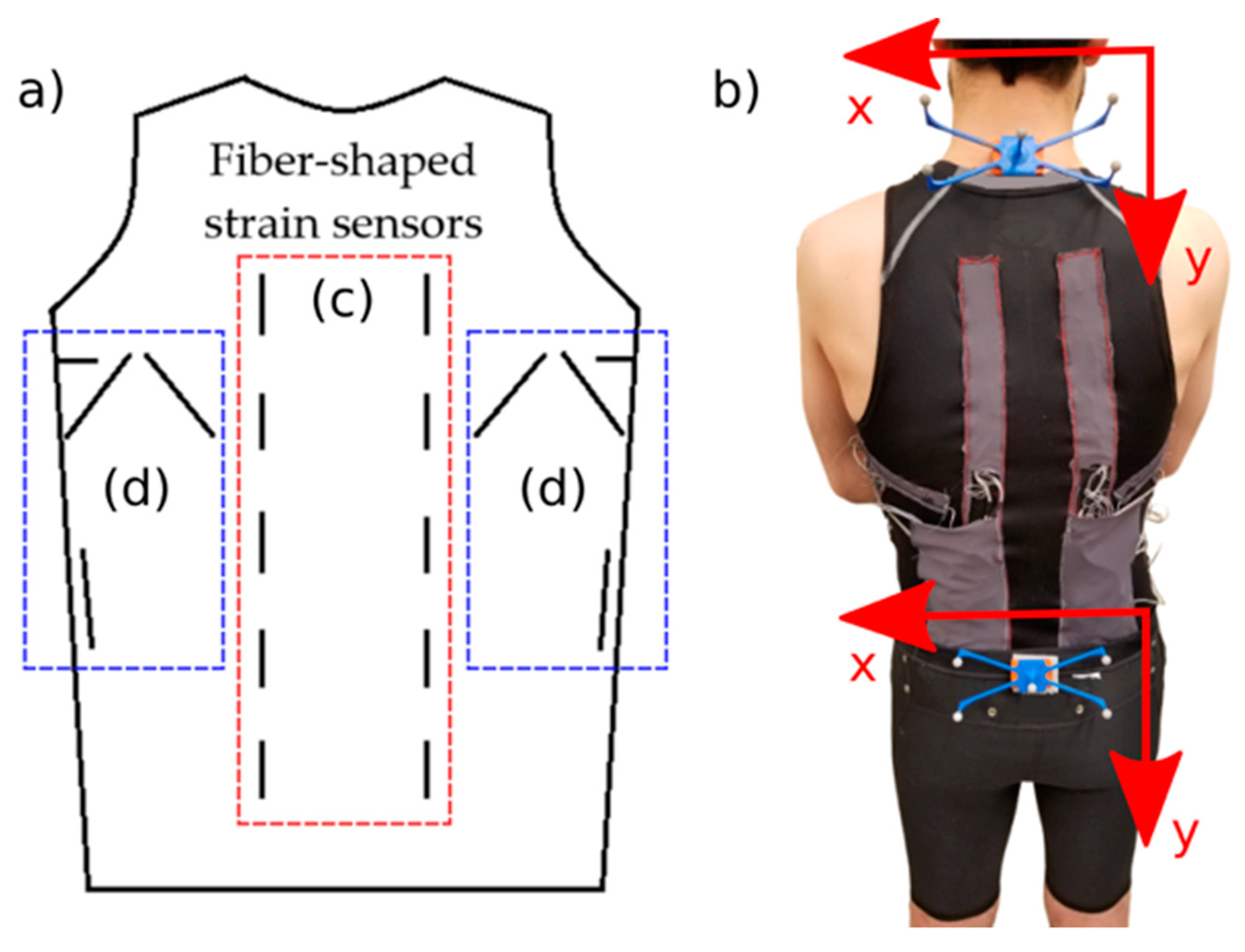
2.6. Smart Sensor Integrated Sleeveless Shirt
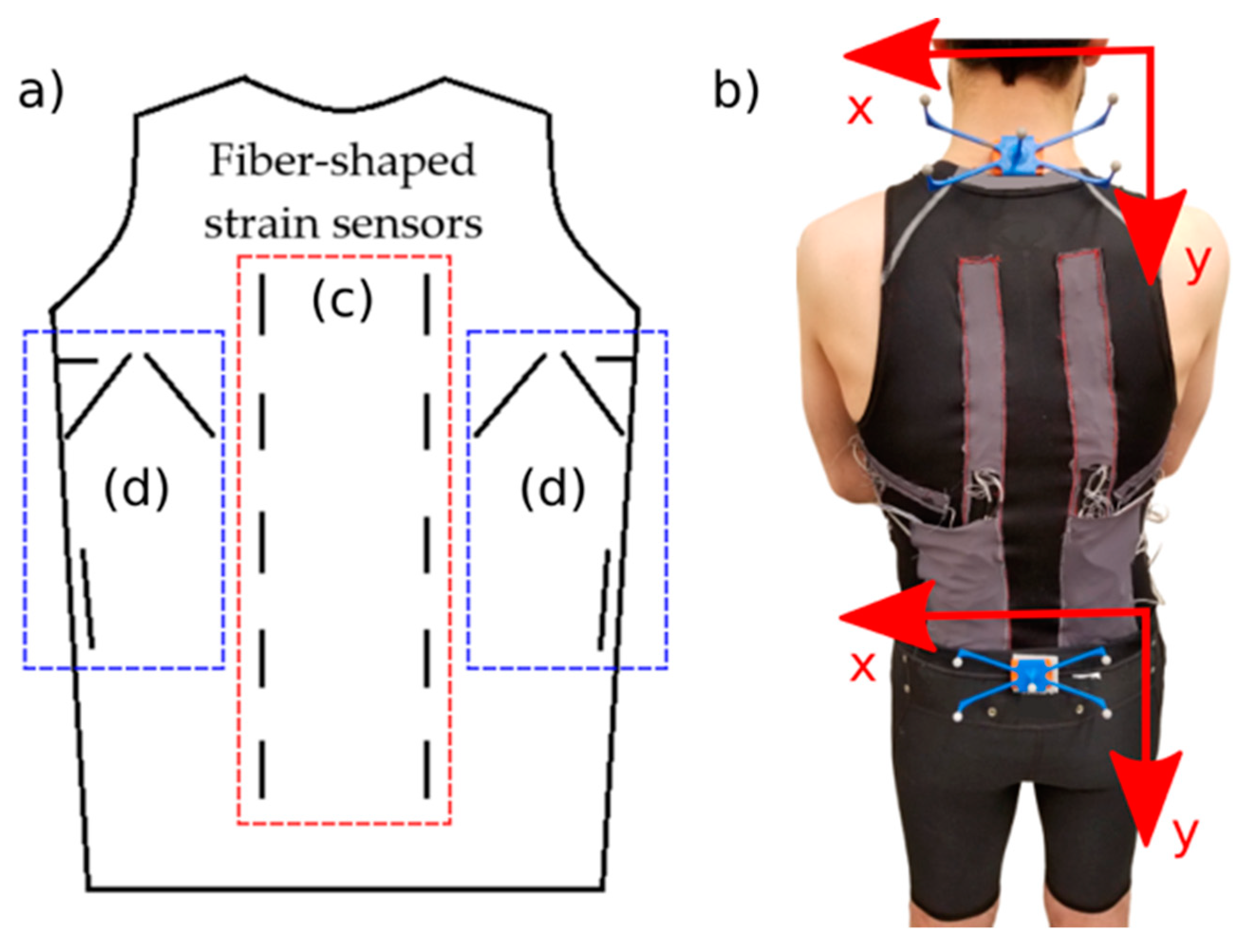
2.6.1. Sensor Placement
2.6.2. Smart Sleeveless Shirt:
2.6.3. Experimental Setup
2.6.4. Participants
2.6.5. Study Protocol
2.6.6. Reference Angle Measurement
2.6.7. Signal Processing
2.6.8. Evaluation
3. Results
3.1. Sensor Characterization
3.1.1. Determining the Working Range of Desired Sensor
3.1.2. Sensor Fabrication, Material Selection, and Basic Sensor Properties
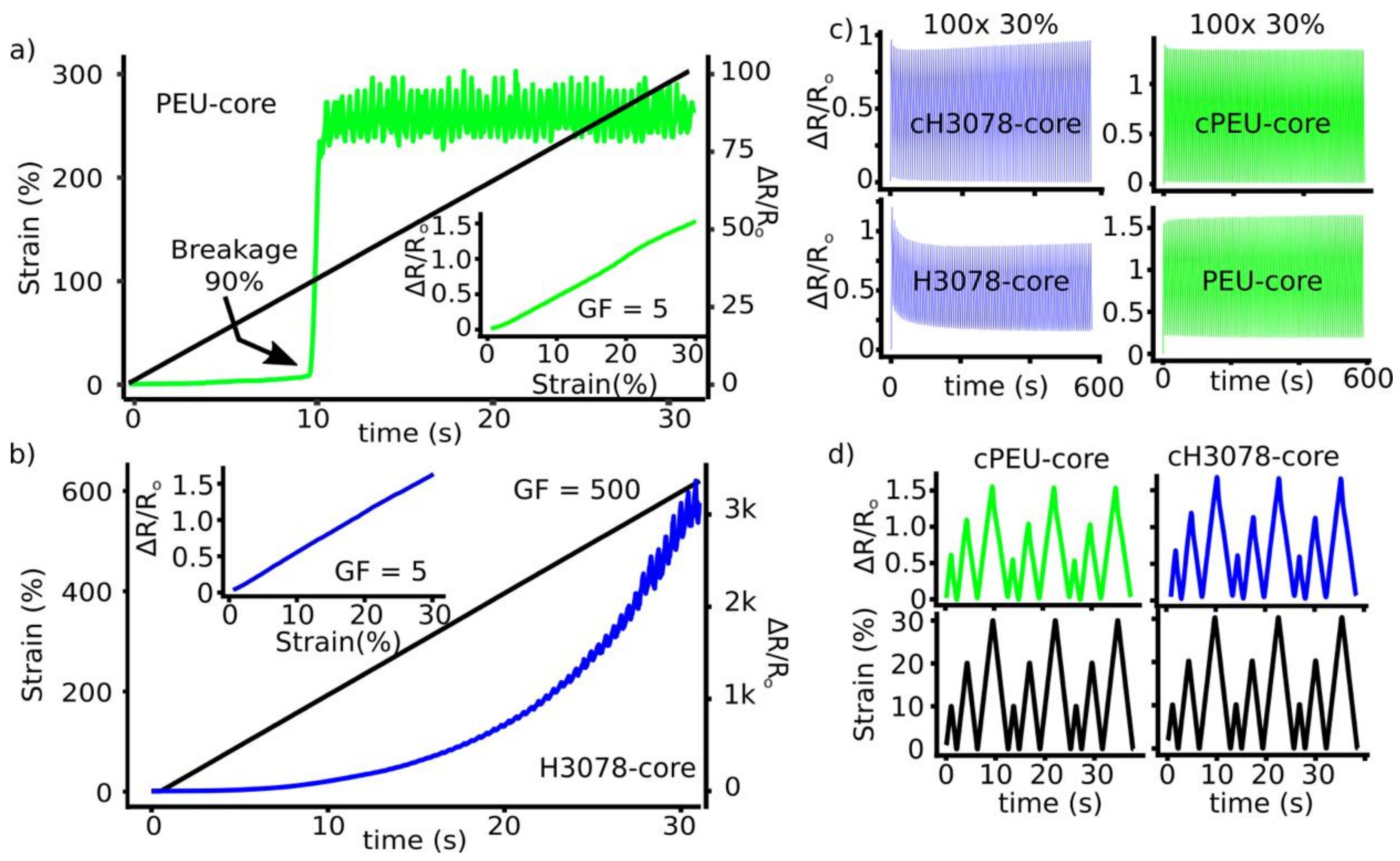
3.1.3. Strain Limit of Sensors
3.1.4. Sensor Conditioning
3.1.5. Sensor Linearity
3.1.6. Effect of Strain Rate on Sensor Performance
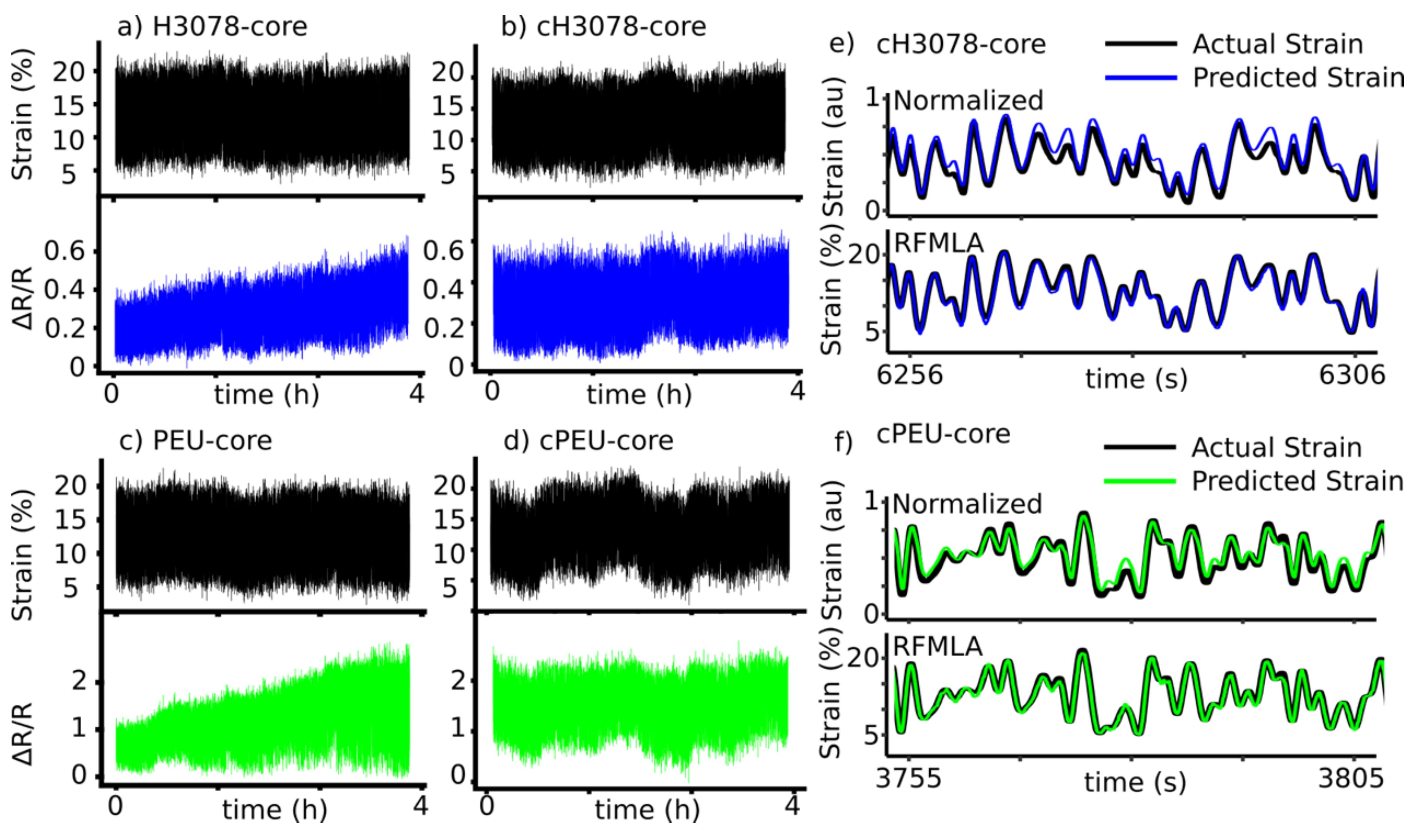
3.1.7. Sensor Testing: Random Wave Pattern to Simulate Real Events
3.1.8. Sensor Optimization Using Machine Learning Algorithms
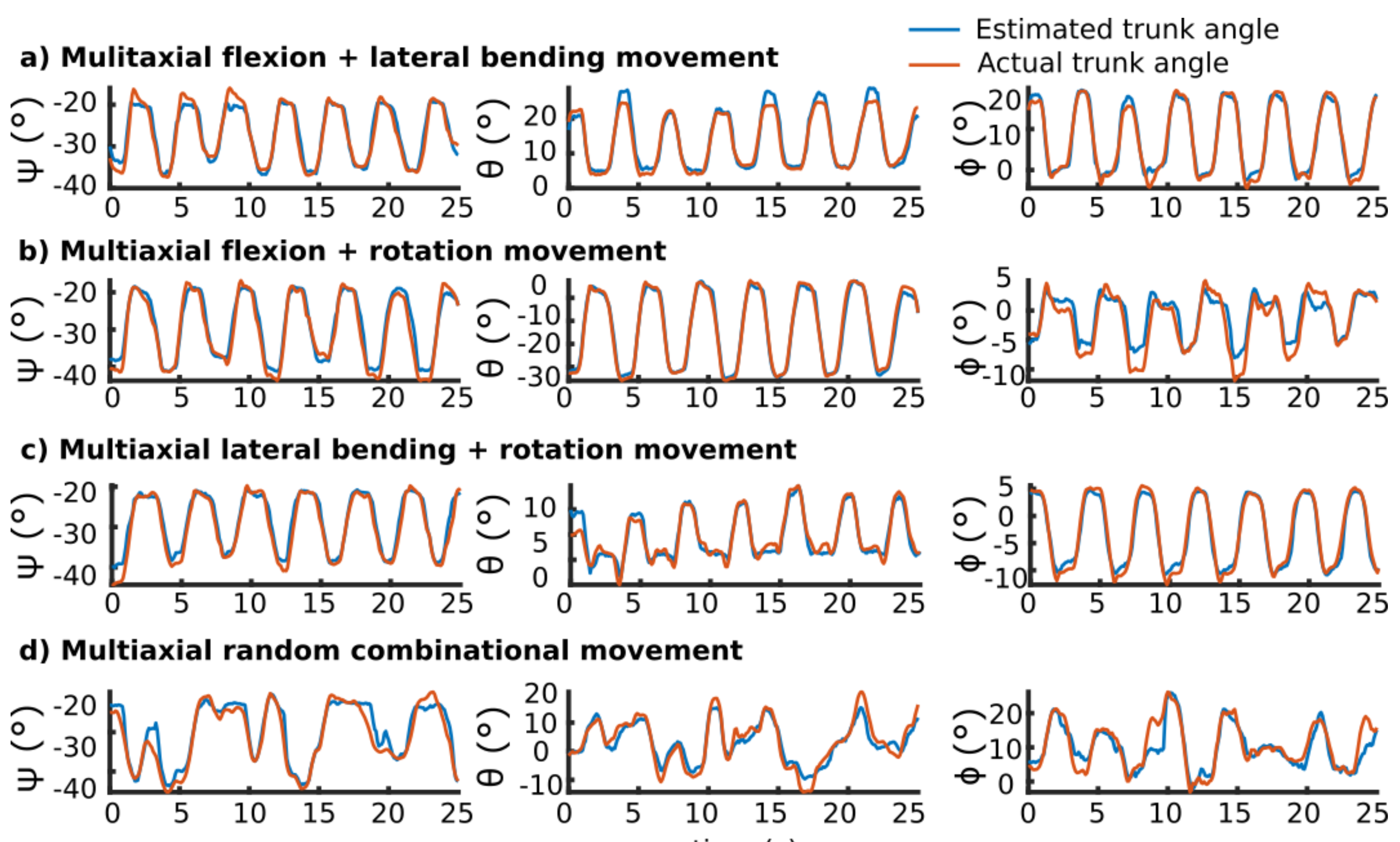
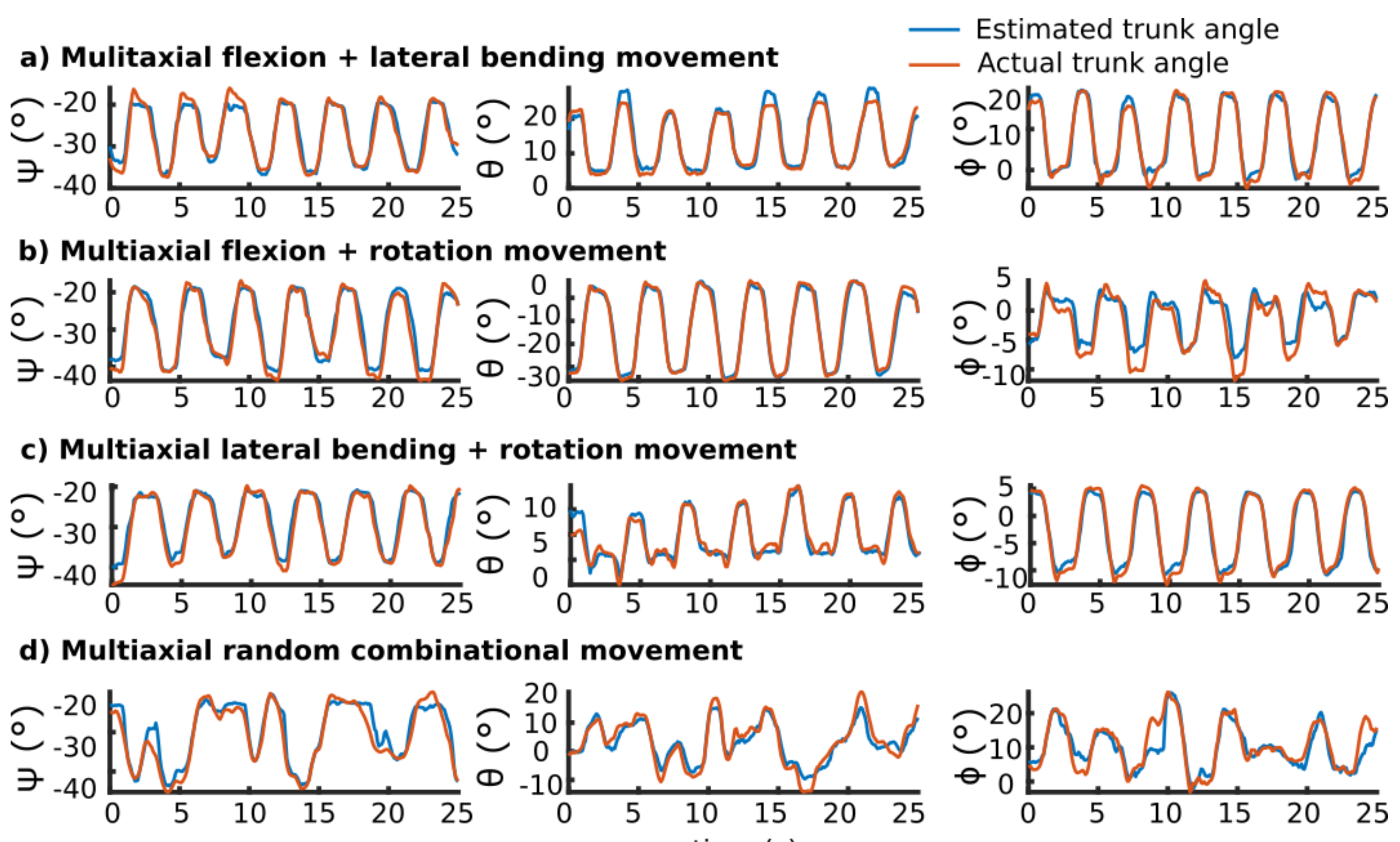
3.2. Smart Sleeveless Shirt Testing
4. Discussion
- (1)
- Could be made from readily available materials.
- (2)
- Would be reliable and accurate within the intended working range for our application.
- (3)
- Would be accurate at tracking strain when exposed to random movements that are typical in prototype devices over longer testing periods.
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Stoppa, M.; Chiolerio, A. Wearable Electronics and Smart Textiles: A Critical Review. Sensors 2014, 14, 11957–11992. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pu, X.; Li, L.; Liu, M.; Jiang, C.; Du, C.; Zhao, Z.; Hu, W.; Wang, Z.L. Wearable Self-Charging Power Textile Based on Flexible Yarn Supercapacitors and Fabric Nanogenerators. Adv. Mater. 2015, 1, 98–105. [Google Scholar] [CrossRef]
- Nilsson, E.; Mateu, L.; Spies, P.; Hagström, B. Energy Harvesting from Piezoelectric Textile Fibers. Procedia Eng. 2014, 87, 1569–1572. [Google Scholar] [CrossRef]
- Lund, A.; Rundqvist, K.; Nilsson, E.; Yu, L.; Hagström, B.; Müller, C. Energy Harvesting Textiles for a Rainy Day: Woven Piezoelectrics Based on Melt-Spun PVDF Microfibres with a Conducting Core. NPJ Flex. Electron. 2018, 2, 9. [Google Scholar] [CrossRef]
- Bahk, J.-H.; Fang, H.; Yazawa, K.; Shakouri, A. Flexible Thermoelectric Materials and Device Optimization for Wearable Energy Harvesting. J. Mater. Chem. C 2015, 3, 10362–10374. [Google Scholar] [CrossRef]
- Peng, H. Fiber-Shaped Energy Harvesting and Storage Devices; Nanostructure Science and Technology; Springer: Berlin, Germany; Heidelberg: New York, NY, USA, 2015. [Google Scholar] [CrossRef]
- Cai, X.; Peng, M.; Yu, X.; Fu, Y.; Zou, D. Flexible Planar/Fiber-Architectured Supercapacitors for Wearable Energy Storage. J. Mater. Chem. C 2014, 2, 1184–1200. [Google Scholar] [CrossRef]
- Meng, Y.; Zhao, Y.; Hu, C.; Cheng, H.; Hu, Y.; Zhang, Z.; Shi, G.; Qu, L. All-Graphene Core-Sheath Microfibers for All-Solid-State, Stretchable Fibriform Supercapacitors and Wearable Electronic Textiles. Adv. Mater. 2013, 25, 2326–2331. [Google Scholar] [CrossRef]
- Harrison, D.; Qiu, F.; Fyson, J.; Xu, Y.; Evans, P.; Southee, D. A Coaxial Single Fibre Supercapacitor for Energy Storage. Phys. Chem. Chem. Phys. 2013, 15, 12215–12219. [Google Scholar] [CrossRef]
- Bae, J.; Song, M.K.; Park, Y.J.; Kim, J.M.; Liu, M.; Wang, Z.L. Fiber Supercapacitors Made of Nanowire-Fiber Hybrid Structures for Wearable/Flexible Energy Storage. Angew. Chem. Int. Ed. 2011, 50, 1683–1687. [Google Scholar] [CrossRef]
- Castano, L.M.; Flatau, A.B. Smart Fabric Sensors and E-Textile Technologies: A Review. Smart Mater. Struct. 2014, 23, 53001–53027. [Google Scholar] [CrossRef]
- Yamada, T.; Hayamizu, Y.; Yamamoto, Y.; Yomogida, Y.; Izadi-Najafabadi, A.; Futaba, D.N.; Hata, K. A Stretchable Carbon Nanotube Strain Sensor for Human-Motion Detection. Nat. Nanotechnol. 2011, 6, 296–301. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.-R.; Kim, J.-H.; Park, J.-W. Wearable and Transparent Capacitive Strain Sensor with High Sensitivity Based on Patterned Ag Nanowire Networks. ACS Appl. Mater. Interfaces 2017, 9, 26407–26416. [Google Scholar] [CrossRef] [PubMed]
- Amjadi, M.; Kyung, K.-U.; Park, I.; Sitti, M. Stretchable, Skin-Mountable, and Wearable Strain Sensors and Their Potential Applications: A Review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Zhou, Y.; He, J.; Wang, H.; Qi, K.; Nan, N.; You, X.; Shao, W.; Wang, L.; Ding, B.; Cui, S. Highly Sensitive, Self-Powered and Wearable Electronic Skin Based on Pressure-Sensitive Nanofiber Woven Fabric Sensor. Sci. Rep. 2017, 7, 12949–12958. [Google Scholar] [CrossRef] [PubMed]
- Chhetry, A.; Yoon, H.; Park, J.Y. A Flexible and Highly Sensitive Capacitive Pressure Sensor Based on Conductive Fibers with a Microporous Dielectric for Wearable Electronics. J. Mater. Chem. C. 2017, 5, 10068–10076. [Google Scholar] [CrossRef]
- Lee, J.; Kwon, H.; Seo, J.; Shin, S.; Koo, J.H.; Pang, C.; Son, S.; Kim, J.H.; Jang, Y.H.; Kim, D.E.; et al. Conductive Fiber-Based Ultrasensitive Textile Pressure Sensor for Wearable Electronics. Adv. Mater. 2015, 27, 2433–2439. [Google Scholar] [CrossRef]
- Huang, C.; Soenen, S.J.; Rejman, J.; Lucas, B.; Braeckmans, K.; Demeester, J.; De Smedt, S.C. Stimuli-Responsive Electrospun Fibers and Their Applications. Chem. Soc. Rev. 2011, 40, 2417–2434. [Google Scholar] [CrossRef] [PubMed]
- Needham, R.; Stebbins, J.; Chockalingam, N. Three-Dimensional Kinematics of the Lumbar Spine during Gait Using Marker-Based Systems: A Systematic Review. J. Med. Eng. Tech. 2016, 40, 172–185. [Google Scholar] [CrossRef]
- Lebel, K.; Boissy, P.; Hamel, M.; Duval, C. Inertial Measures of Motion for Clinical Biomechanics: Comparative Assessment of Accuracy under Controlled Conditions—Effect of Velocity. PLoS ONE 2013, 8, e79945. [Google Scholar] [CrossRef]
- Dehzangi, O.; Taherisadr, M.; ChangalVala, R. IMU-Based Gait Recognition Using Convolutional Neural Networks and Multi-Sensor Fusion. Sensors 2017, 17, 2735. [Google Scholar] [CrossRef]
- Choi, S.; Shin, Y.B.; Kim, S.-Y.; Kim, J. A Novel Sensor-Based Assessment of Lower Limb Spasticity in Children with Cerebral Palsy. J. Neuroeng. Rehabil. 2018, 15, 45. [Google Scholar] [CrossRef] [PubMed]
- Tafazzol, A.; Arjmand, N.; Shirazi-Adl, A.; Parnianpour, M. Lumbopelvic Rhythm during Forward and Backward Sagittal Trunk Rotations: Combined In Vivo Measurement with Inertial Tracking Device and Biomechanical Modeling. Clin. Biomech. 2014, 29, 7–13. [Google Scholar] [CrossRef] [PubMed]
- Hajibozorgi, M.; Arjmand, N. Sagittal Range of Motion of the Thoracic Spine Using Inertial Tracking Device and Effect of Measurement Errors on Model Predictions. J. Biomech. 2016, 49, 913–918. [Google Scholar] [CrossRef] [PubMed]
- Intolo, P.; Carman, A.B.; Milosavljevic, S.; Abbott, J.H.; Baxter, G.D. The Spineangel®: Examining the Validity and Reliability of a Novel Clinical Device for Monitoring Trunk Motion. Man. Ther. 2010, 15, 160–166. [Google Scholar] [CrossRef]
- Kim, S.; Nussbaum, M.A. Performance Evaluation of a Wearable Inertial Motion Capture System for Capturing Physical Exposures during Manual Material Handling Tasks. Ergonomics 2013, 56, 314–326. [Google Scholar] [CrossRef] [PubMed]
- Robert-Lachaine, X.; Mecheri, H.; Larue, C.; Plamondon, A. Validation of Inertial Measurement Units with an Optoelectronic System for Whole-Body Motion Analysis. Med. Biol. Eng. Comput. 2017, 55, 609–619. [Google Scholar] [CrossRef]
- Godwin, A.; Agnew, M.; Stevenson, J. Accuracy of Inertial Motion Sensors in Static, Quasistatic, and Complex Dynamic Motion. J. Biomech. Eng. 2009, 131, 114501–114505. [Google Scholar] [CrossRef] [PubMed]
- Brodie, M.A.; Walmsley, A.; Page, W. Dynamic Accuracy of Inertial Measurement Units during Simple Pendulum Motion. Comput. Methods Biomech. Biomed. Engin. 2008, 11, 235–242. [Google Scholar] [CrossRef]
- Samadani, A.; Lee, A.; Kulić, D. A Spinal Motion Measurement Protocol Utilizing Inertial Sensors Without Magnetometers. In Proceedings of the 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 17–21 July 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Ha, T.-H.; Saber-Sheikh, K.; Moore, A.P.; Jones, M.P. Measurement of Lumbar Spine Range of Movement and Coupled Motion Using Inertial Sensors—A Protocol Validity Study. Man. Ther. 2013, 18, 87–91. [Google Scholar] [CrossRef]
- Bauer, C.M.; Rast, F.M.; Ernst, M.J.; Kool, J.; Oetiker, S.; Rissanen, S.M.; Suni, J.H.; Kankaanpää, M. Concurrent Validity and Reliability of a Novel Wireless Inertial Measurement System to Assess Trunk Movement. J. Electromyogr. Kinesiol. 2015, 25, 782–790. [Google Scholar] [CrossRef]
- Cooper, C.B.; Arutselvan, K.; Liu, Y.; Armstrong, D.; Lin, Y.; Khan, M.R.; Genzer, J.; Dickey, M.D. Stretchable Capacitive Sensors of Torsion, Strain, and Touch Using Double Helix Liquid Metal Fibers. Adv. Funct. Mater. 2017, 27, 1605630. [Google Scholar] [CrossRef]
- Zahid, M.; Papadopoulou, E.L.; Athanassiou, A.; Bayer, I.S. Strain-Responsive Mercerized Conductive Cotton Fabrics Based on PEDOT:PSS/Graphene. Mater. Des. 2017, 135, 213–222. [Google Scholar] [CrossRef]
- Yin, F.; Li, X.; Peng, H.; Li, F.; Yang, K.; Yuan, W. A Highly Sensitive, Multifunctional, and Wearable Mechanical Sensor Based on RGO/Synergetic Fiber Bundles for Monitoring Human Actions and Physiological Signals. Sens. Actuators B Chem. 2019, 285, 179–185. [Google Scholar] [CrossRef]
- Liu, Z.F.; Fang, S.; Moura, F.A.; Ding, J.N.; Jiang, N.; Di, J.; Zhang, M.; Lepro, X.; Galvao, D.S.; Haines, C.S.; et al. Hierarchically Buckled Sheath-Core Fibers for Superelastic Electronics, Sensors, and Muscles. Science 2015, 349, 400–404. [Google Scholar] [CrossRef] [PubMed]
- Mattmann, C.; Clemens, F.; Tröster, G. Sensor for Measuring Strain in Textile. Sensors 2008, 8, 3719–3732. [Google Scholar] [CrossRef] [PubMed]
- Seyedin, S.; Razal, J.M.; Innis, P.C.; Jeiranikhameneh, A.; Beirne, S.; Wallace, G.G. Knitted Strain Sensor Textiles of Highly Conductive All-Polymeric Fibers. ACS Appl. Mater. Interfaces 2015, 7, 21150–21158. [Google Scholar] [CrossRef]
- Eom, J.; Jaisutti, R.; Lee, H.; Lee, W.; Heo, J.-S.; Lee, J.-Y.; Park, S.K.; Kim, Y.-H. Highly Sensitive Textile Strain Sensors and Wireless User-Interface Devices Using All-Polymeric Conducting Fibers. ACS Appl. Mater. Interfaces 2017, 9, 10190–10197. [Google Scholar] [CrossRef]
- Keulemans, G.; Ceyssens, F.; Puers, R. An Ionic Liquid Based Strain Sensor for Large Displacement Measurement. Biomed. Microdevices 2017, 19, 1–9. [Google Scholar] [CrossRef]
- Chen, S.; Liu, H.; Liu, S.; Wang, P.; Zeng, S.; Sun, L.; Liu, L. Transparent and Waterproof Ionic Liquid-Based Fibers for Highly Durable Multifunctional Sensors and Strain-Insensitive Stretchable Conductors. ACS Appl. Mater. Interfaces 2018, 10, 4305–4314. [Google Scholar] [CrossRef]
- Nilsson, E.; Oxfall, H.; Wandelt, W.; Rychwalski, R.; Hagström, B. Melt Spinning of Conductive Textile Fibers with Hybridized Graphite Nanoplatelets and Carbon Black Filler. J. Appl. Polym. Sci. 2013, 130, 2579–2587. [Google Scholar] [CrossRef]
- Grigoryev, A.; Sa, V.; Gopishetty, V.; Tokarev, I.; Kornev, K.G.; Minko, S. Wet-Spun Stimuli-Responsive Composite Fibers with Tunable Electrical Conductivity. Adv. Funct. Mater. 2013, 23, 5903–5909. [Google Scholar] [CrossRef]
- Tang, Z.; Jia, S.; Wang, F.; Bian, C.; Chen, Y.; Wang, Y.; Li, B. Highly Stretchable Core–Sheath Fibers via Wet-Spinning for Wearable Strain Sensors. ACS Appl. Mater. Interfaces 2018, 10, 6624–6635. [Google Scholar] [CrossRef] [PubMed]
- Yoon, J.; Yang, H.-S.; Lee, B.-S.; Yu, W.-R. Recent Progress in Coaxial Electrospinning: New Parameters, Various Structures, and Wide Applications. Adv. Mater. 2017, 30, 1704765. [Google Scholar] [CrossRef] [PubMed]
- Labbaf, S.; Ghanbar, H.; Stride, E.; Edirisinghe, M. Preparation of Multilayered Polymeric Structures Using a Novel Four-Needle Coaxial Electrohydrodynamic Device. Macromol. Rapid Commun. 2013, 35, 618–623. [Google Scholar] [CrossRef] [PubMed]
- Mahalingam, S.; Homer-Vanniasinkam, S.; Edirisinghe, M. Novel Pressurised Gyration Device for Making Core-Sheath Polymer Fibres. Mater. Des. 2019, 178, 107846. [Google Scholar] [CrossRef]
- Heseltine, P.L.; Ahmed, J.; Edirisinghe, M. Developments in Pressurized Gyration for the Mass Production of Polymeric Fibers. Macromol. Mater. Eng. 2018, 303, 1800218. [Google Scholar] [CrossRef]
- Medeiros, E.S.; Glenn, G.M.; Klamczynski, A.P.; Orts, W.J.; Mattoso, L.H.C. Solution Blow Spinning: A New Method to Produce Micro- and Nanofibers from Polymer Solutions. J. Appl. Polym. Sci. 2009, 113, 2322–2330. [Google Scholar] [CrossRef]
- Gao, Y.; Yu, G.; Shu, T.; Chen, Y.; Yang, W.; Liu, Y.; Long, J.; Xiong, W.; Xuan, F. 3D-Printed Coaxial Fibers for Integrated Wearable Sensor Skin. Adv. Mater. Technol. 2019, 1900504. [Google Scholar] [CrossRef]
- Jian, M.; Wang, C.; Wang, Q.; Wang, H.; Xia, K.; Yin, Z.; Zhang, M.; Liang, X.; Zhang, Y. Advanced Carbon Materials for Flexible and Wearable Sensors. Sci. China Mater. 2017, 60, 1026–1062. [Google Scholar] [CrossRef]
- Stassi, S.; Cauda, V.; Canavese, G.; Pirri, C.F. Flexible Tactile Sensing Based on Piezoresistive Composites: A Review. Sensors 2014, 14, 5296–5332. [Google Scholar] [CrossRef] [Green Version]
- Foroughi, J.; Spinks, G.M.; Aziz, S.; Mirabedini, A.; Jeiranikhameneh, A.; Wallace, G.G.; Kozlov, M.E.; Baughman, R.H. Knitted Carbon-Nanotube-Sheath/Spandex-Core Elastomeric Yarns for Artificial Muscles and Strain Sensing. ACS Nano 2016, 10, 9129–9135. [Google Scholar] [CrossRef] [PubMed]
- Montazerian, H.; Rashidi, A.; Dalili, A.; Najjaran, H.; Milani, A.S.; Hoorfar, M. Graphene-Coated Spandex Sensors Embedded into Silicone Sheath for Composites Health Monitoring and Wearable Applications. Small 2019, 15, 1804991. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Lou, Z.; Chen, D.; Jiang, K.; Shen, G. Polymer-Enhanced Highly Stretchable Conductive Fiber Strain Sensor Used for Electronic Data Gloves. Adv. Mater. Technol. 2016, 1, 1600136. [Google Scholar] [CrossRef]
- Zhou, J.; Xu, X.; Xin, Y.; Lubineau, G. Coaxial Thermoplastic Elastomer-Wrapped Carbon Nanotube Fibers for Deformable and Wearable Strain Sensors. Adv. Funct. Mater. 2018, 28, 1705591. [Google Scholar] [CrossRef]
- Esfahani, M.I.M.; Nussbaum, M.A. A “Smart” Undershirt for Tracking Upper Body Motions: Task Classification and Angle Estimation. IEEE Sens. J. 2018, 18, 7650–7658. [Google Scholar] [CrossRef]
- Yamamoto, A.; Nakamoto, H.; Yamaji, T.; Ootaka, H.; Bessho, Y.; Nakamura, R.; Ono, R. Method for Measuring Tri-Axial Lumbar Motion Angles Using Wearable Sheet Stretch Sensors. PLoS ONE 2017, 12, e0183651. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Ejupi, A.; Ferrone, A.; Menon, C. Quantification of Textile-Based Stretch Sensors Using Machine Learning: An Exploratory Study. In Proceedings of the 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; pp. 254–259. [Google Scholar] [CrossRef]
- Gholami, M.; Ejupi, A.; Rezaei, A.; Ferrone, A.; Menon, C. Estimation of Knee Joint Angle Using a Fabric-Based Strain Sensor and Machine Learning: A Preliminary Investigation. In Proceedings of the 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; pp. 589–594. [Google Scholar] [CrossRef]
- Rezaei, A.; Ejupi, A.; Gholami, M.; Ferrone, A.; Menon, C. Preliminary Investigation of Textile-Based Strain Sensors for the Detection of Human Gait Phases Using Machine Learning. In Proceedings of the 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; pp. 563–568. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-Learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Mattmann, C. Body Posture Detection Using Strain Sensitive Clothing; ETH: Zürich, Switzerland, 2008. [Google Scholar]
- Mattmann, C.; Amft, O.; Harms, H.; Troster, G.; Clemens, F. Recognizing Upper Body Postures Using Textile Strain Sensors. In Proceedings of the 2007 11th IEEE International Symposium on Wearable Computers, Washington, DC, USA, 11–13 October 2007; pp. 29–36. [Google Scholar] [CrossRef]
- Consmüller, T.; Rohlmann, A.; Weinland, D.; Schmidt, H.; Zippelius, T.; Duda, G.N.; Taylor, W.R. Automatic Distinction of Upper Body Motions in the Main Anatomical Planes. Med. Eng. Phys. 2014, 36, 516–521. [Google Scholar] [CrossRef]
- Tormene, P.; Bartolo, M.; De Nunzio, A.M.; Fecchio, F.; Quaglini, S.; Tassorelli, C.; Sandrini, G. Estimation of Human Trunk Movements by Wearable Strain Sensors and Improvement of Sensor’s Placement on Intelligent Biomedical Clothes. Biomed. Eng. Online 2012, 11, 95. [Google Scholar] [CrossRef]
- Esfahani, M.I.M.; Nussbaum, M.A.; Kong, Z. Using a Smart Textile System for Classifying Occupational Manual Material Handling Tasks: Evidence from Lab-Based Simulations. Ergonomics 2019, 62, 823–833. [Google Scholar] [CrossRef] [PubMed]
- Bersch, S.D.; Azzi, D.; Khusainov, R.; Achumba, I.E.; Ries, J. Sensor Data Acquisition and Processing Parameters for Human Activity Classification. Sensors 2014, 14, 4239–4270. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bergstrom, J. Constitutive Modeling of the Large Strain Time-Dependent Behavior of Elastomers. J. Mech. Phys. Solids 1998, 46, 931–954. [Google Scholar] [CrossRef]
- Le, H.H.; Lüpke, T.; Pham, T.; Radusch, H.-J. Time Dependent Deformation Behavior of Thermoplastic Elastomers. Polymer 2003, 44, 4589–4597. [Google Scholar] [CrossRef]
- Yang, H.; Yao, X.; Yuan, L.; Gong, L.; Liu, Y. Strain-Sensitive Electrical Conductivity of Carbon Nanotube-Graphene-Filled Rubber Composites under Cyclic Loading. Nanoscale 2019, 11, 578–586. [Google Scholar] [CrossRef]
- Tolvanen, J.; Hannu, J.; Jantunen, H. Stretchable and Washable Strain Sensor Based on Cracking Structure for Human Motion Monitoring. Sci. Rep. 2018, 8. [Google Scholar] [CrossRef]
- Roy Choudhury, A.K. Roy Choudhury. Process Control in Finishing of Textiles—Process Control in Textile Manufacturing. In Process in Textile Manufacturing; Woodhead Publishing: Sawston, UK, 2012. [Google Scholar]
- Lee, J.; Shin, S.; Lee, S.; Song, J.; Kang, S.; Han, H.; Kim, S.; Kim, S.; Seo, J.; Kim, D.; et al. Highly Sensitive Multifilament Fiber Strain Sensors with Ultrabroad Sensing Range for Textile Electronics. ACS Nano 2018, 12, 4259–4268. [Google Scholar] [CrossRef]
- Brown, H.R. The Adhesion between Polymers. Annu. Rev. Mater. Sci. 1991, 21, 463–489. [Google Scholar] [CrossRef]
- Kar, K.K.; Bhowmick, A.K. Effect of Holding Time on High Strain Hysteresis Loss of Carbon Black Filled Rubber Vulcanizates. Polym. Eng. Sci. 1998, 38, 1927–1945. [Google Scholar] [CrossRef]
- Liao, X.; Wang, W.; Wang, L.; Tang, K.; Zheng, Y. Controllably Enhancing Stretchability of Highly Sensitive Fiber-Based Strain Sensors for Intelligent Monitoring. ACS Appl. Mater. Interfaces 2019, 11, 2431–2440. [Google Scholar] [CrossRef]
- Shintake, J.; Piskarev, E.; Jeong, S.H.; Floreano, D. Ultrastretchable Strain Sensors Using Carbon Black-Filled Elastomer Composites and Comparison of Capacitive Versus Resistive Sensors. Adv. Mater. Technol. 2018, 3, 1700284. [Google Scholar] [CrossRef]
- Cuesta-Vargas, A.I.; Galán-Mercant, A.; Williams, J.M. The Use of Inertial Sensors System for Human Motion Analysis. Phys. Ther. Rev. 2010, 15, 462–473. [Google Scholar] [CrossRef] [PubMed]
- Mokhlespour Esfahani, M.I.; Zobeiri, O.; Moshiri, B.; Narimani, R.; Mehravar, M.; Rashedi, E.; Parnianpour, M. Trunk Motion System (TMS) Using Printed Body Worn Sensor (BWS) via Data Fusion Approach. Sensors 2017, 17, 112. [Google Scholar] [CrossRef] [PubMed]
- Schall, M.C.; Fethke, N.B.; Chen, H.; Oyama, S.; Douphrate, D.I. Accuracy and Repeatability of an Inertial Measurement Unit System for Field-Based Occupational Studies. Ergonomics 2016, 59, 591–602. [Google Scholar] [CrossRef]
- de Vries, W.H.K.; Veeger, H.E.J.; Baten, C.T.M.; van der Helm, F.C.T. Magnetic Distortion in Motion Labs, Implications for Validating Inertial Magnetic Sensors. Gait Posture 2009, 29, 535–541. [Google Scholar] [CrossRef] [PubMed]
- Abyarjoo, F.; Barreto, A.; Cofino, J.; Ortega, F.R. Implementing a Sensor Fusion Algorithm for 3D Orientation Detection with Inertial/Magnetic Sensors. In Innovations and Advances in Computing, Informatics, Systems Sciences, Networking and Engineering; Sobh, T., Elleithy, K., Eds.; Lecture Notes in Electrical Engineering; Springer International Publishing: New York, NY, USA, 2015; pp. 305–310. [Google Scholar]
- Wong, W.Y.; Wong, M.S. Trunk Posture Monitoring with Inertial Sensors. Eur. Spine J. 2008, 17, 743–753. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Categories | Participant |
|---|---|
| Age (years) | 28 (3.3) |
| Height (cm) | 177 (7.6) |
| Weight (kg) | 75 (9.8) |
| Trial Number | Movement Condition | Movement Type |
|---|---|---|
| 1–3 | Rotation | Uniaxial |
| 4–6 | Lateral Bending (LB) | Uniaxial |
| 7–9 | Flexion | Uniaxial |
| 10–12 | Slouching | Uniaxial |
| 13–15 | Flexion + Lateral Bending | Multiaxial |
| 16–18 | Flexion + Rotation | Multiaxial |
| 19–21 | Lateral Bending + Rotation | Multiaxial |
| 22–24 | Random Combination | Multiaxial |
| Sample | NRMSE a | NRMSE b | RFMLA NRMSE c |
|---|---|---|---|
| H3078 core | 7.7% | 15% | - |
| cH3078 core | 7.1% | 6.4% | 1.6% |
| PEU core | 9.3% | 16% | - |
| cPEU core | 5.0% | 6.3% | 2.6% |
| Ψ | θ | ϕ | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Speed | RMSE (Deg) | NRMSE (%) | RMSE (Deg) | NRMSE (%) | RMSE (Deg) | NRMSE (%) | |||
| Slow | 0.94 | 4.12 | 5.05 | 0.93 | 3.35 | 4.70 | 0.92 | 3.26 | 5.73 |
| Moderate | 0.96 | 3.61 | 4.55 | 0.94 | 3.12 | 4.09 | 0.93 | 3.03 | 5.10 |
| Fast | 0.92 | 5.06 | 5.82 | 0.90 | 4.12 | 5.25 | 0.88 | 4.02 | 6.55 |
| Average | 0.94(0.02) | 4.26(0.73) | 5.14(0.64) | 0.92(0.02) | 3.53(0.52) | 4.68(0.58) | 0.91(0.03) | 3.44(0.52) | 5.79(0.73) |
| ψ | θ | ϕ | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Movement | RMSE (deg) | NRMSE (%) | RMSE (deg) | NRMSE (%) | RMSE (deg) | NRMSE (%) | |||
| Rotation | 0.94 | 3.23 | 3.91 | 0.97 | 1.66 | 2.41 | 0.94 | 2.45 | 3.73 |
| Lateral Bending | 0.93 | 3.65 | 4.32 | 0.83 | 3.60 | 3.07 | 0.98 | 1.94 | 2.84 |
| Flexion | 0.97 | 3.08 | 3.49 | 0.85 | 4.16 | 3.52 | 0.87 | 3.13 | 4.34 |
| Slouching | 0.95 | 2.39 | 3.39 | 0.93 | 1.17 | 2.85 | 0.94 | 2.12 | 4.26 |
| Flexion + Lateral Bending | 0.87 | 4.27 | 8.78 | 0.89 | 4.08 | 4.85 | 0.92 | 3.12 | 6.04 |
| Flexion + Rotation | 0.92 | 4.60 | 7.10 | 0.87 | 4.36 | 6.83 | 0.82 | 3.02 | 8.03 |
| Lateral Bending + Rotation | 0.92 | 4.29 | 7.25 | 0.86 | 4.26 | 5.83 | 0.97 | 3.38 | 5.42 |
| Random Combination | 0.85 | 5.13 | 7.74 | 0.83 | 4.90 | 10.67 | 0.85 | 4.48 | 10.09 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rezaei, A.; Cuthbert, T.J.; Gholami, M.; Menon, C. Application-Based Production and Testing of a Core–Sheath Fiber Strain Sensor for Wearable Electronics: Feasibility Study of Using the Sensors in Measuring Tri-Axial Trunk Motion Angles. Sensors 2019, 19, 4288. https://doi.org/10.3390/s19194288
Rezaei A, Cuthbert TJ, Gholami M, Menon C. Application-Based Production and Testing of a Core–Sheath Fiber Strain Sensor for Wearable Electronics: Feasibility Study of Using the Sensors in Measuring Tri-Axial Trunk Motion Angles. Sensors. 2019; 19(19):4288. https://doi.org/10.3390/s19194288
Chicago/Turabian StyleRezaei, Ahmad, Tyler J. Cuthbert, Mohsen Gholami, and Carlo Menon. 2019. "Application-Based Production and Testing of a Core–Sheath Fiber Strain Sensor for Wearable Electronics: Feasibility Study of Using the Sensors in Measuring Tri-Axial Trunk Motion Angles" Sensors 19, no. 19: 4288. https://doi.org/10.3390/s19194288