A Review of Pedestrian Indoor Positioning Systems for Mass Market Applications




Abstract
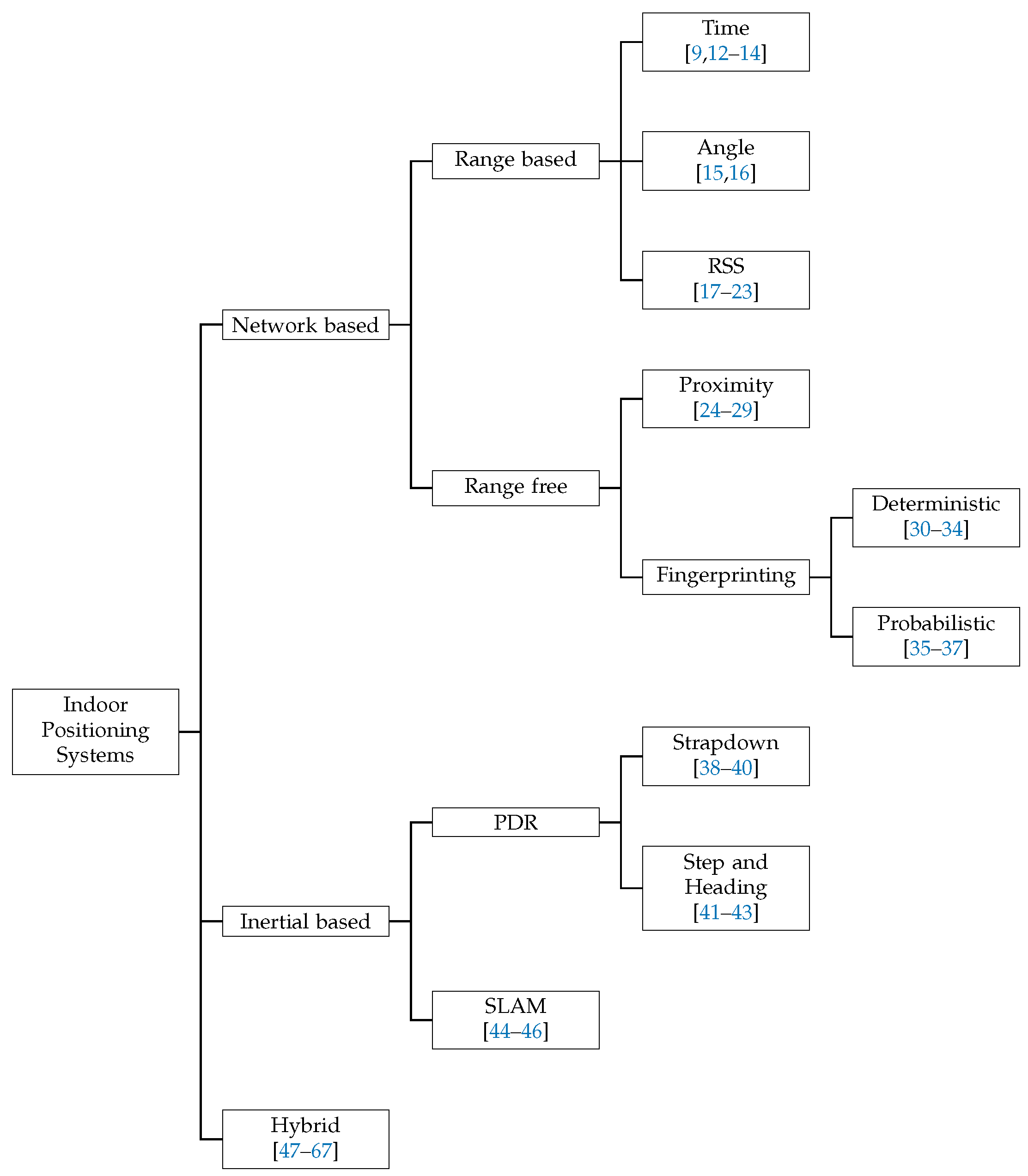
:1. Introduction
- Network based systems: these systems are build on the top of a wireless network deployed in the scenario and use the information of the wireless signals to estimate the position of the user carrying a wireless device.
- Inertial based systems: these systems use self-contained sensors that measure the motion of the user and estimate its position relative to the starting point without the need of any physical infrastructure deployed in the building.
- Hybrid systems: these systems jointly combine two or more different methods in order to enhance the estimation of position.
2. Network Based Systems
2.1. Range Based
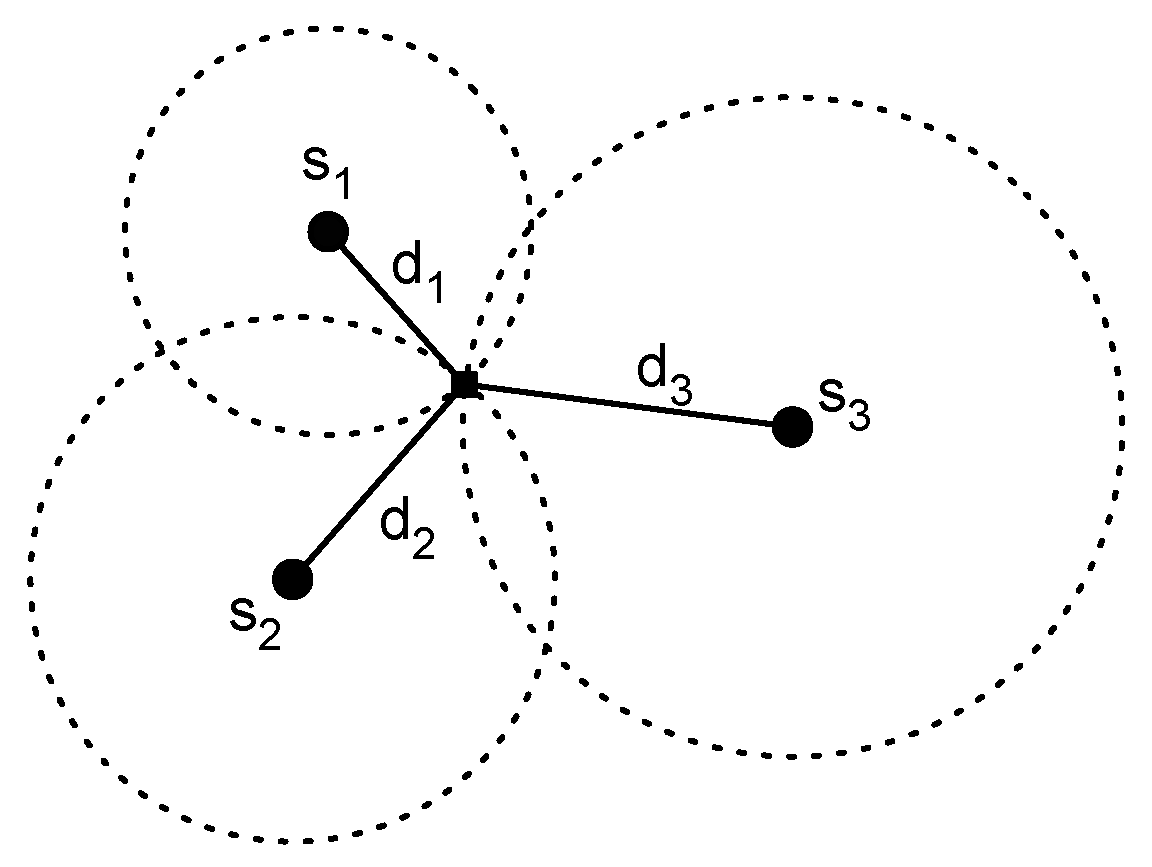
2.1.1. Time
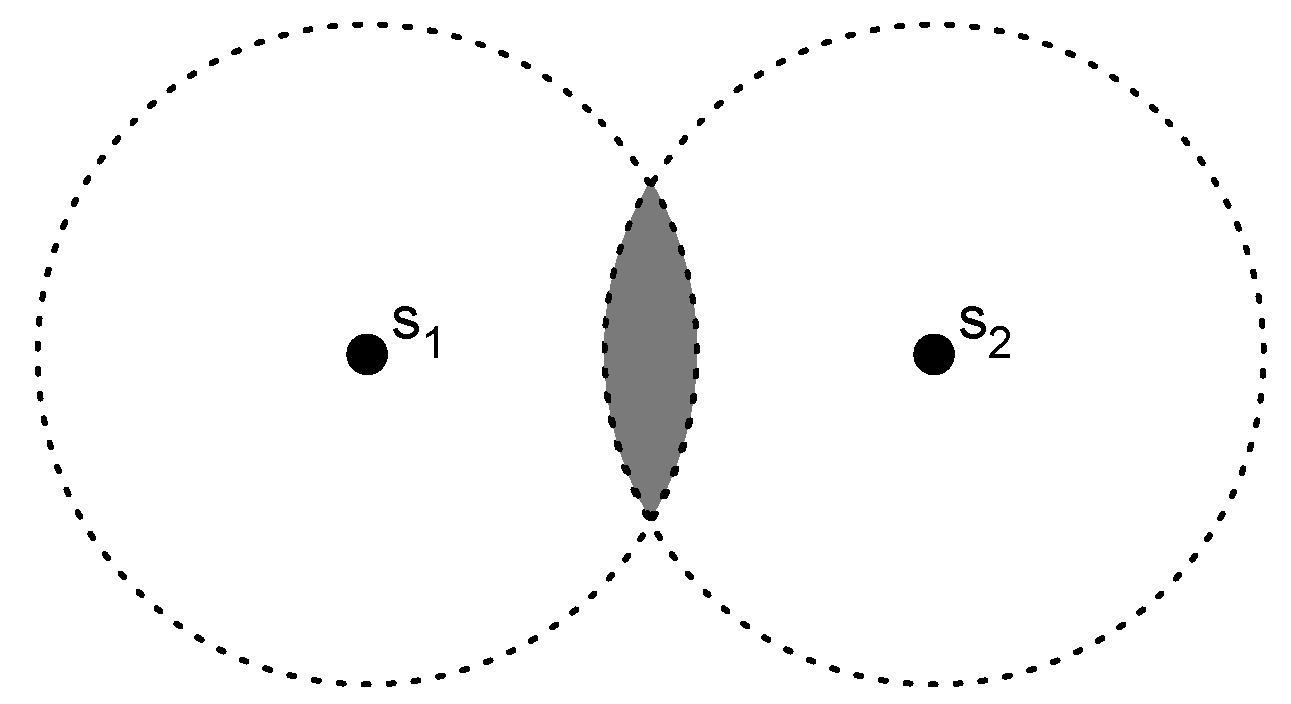
- The first TDoA method computes the difference in the ToA of a signal transmitted to two different receivers. For each TDoA measurement the transmitter must be in a hyperboloid with a constant range difference between the two receiver positions [4]. This method relaxes the synchronization constraint to the receivers.
- The second TDoA method is based on the difference in the ToA of two different signals with different propagation times. Usually, the first signal is the radio packet and the second one is a kind of sound signal due to the difference in the propagation speed between the electromagnetic waves (propagate at the speed of light ≈300,000 ) and the acoustic waves (propagation speed ≈340 ) [68]. This method does not need synchronization but the nodes must include additional hardware in order to send two kind of signals simultaneously.
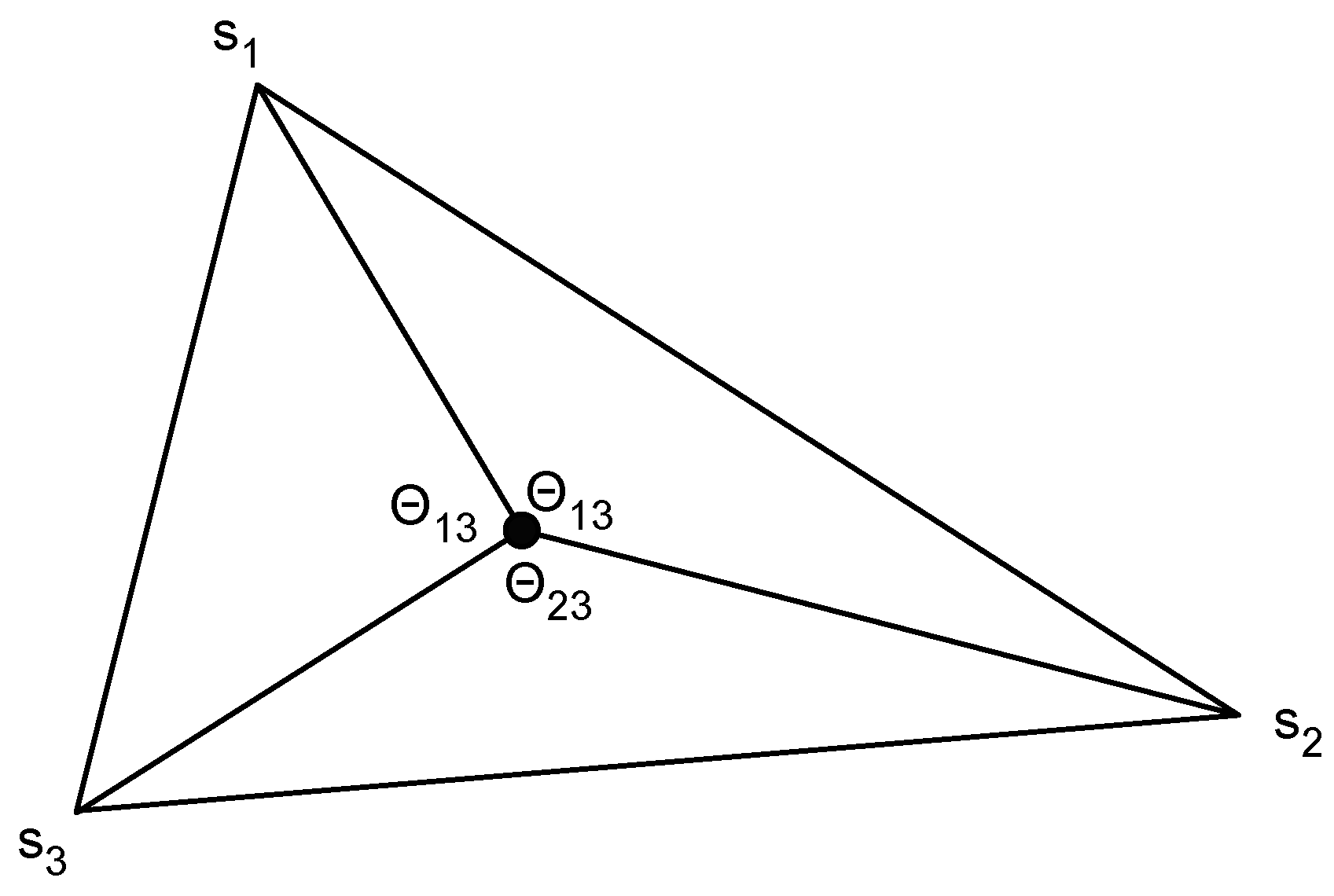
2.1.2. Angle
- Use an array of sensors (for ultrasound systems) whose locations relative to the node center are known and use the difference in the ToA of the signal at each sensor to compute the AoA of the anchor node. In the case of using radio signals the array of sensors is replaced by an antenna array.
- Use two or more directional antennas pointing to different directions and with overlapping main beams. Then compute the AoA as a function of the ratio of the RSS of the individual antennas.
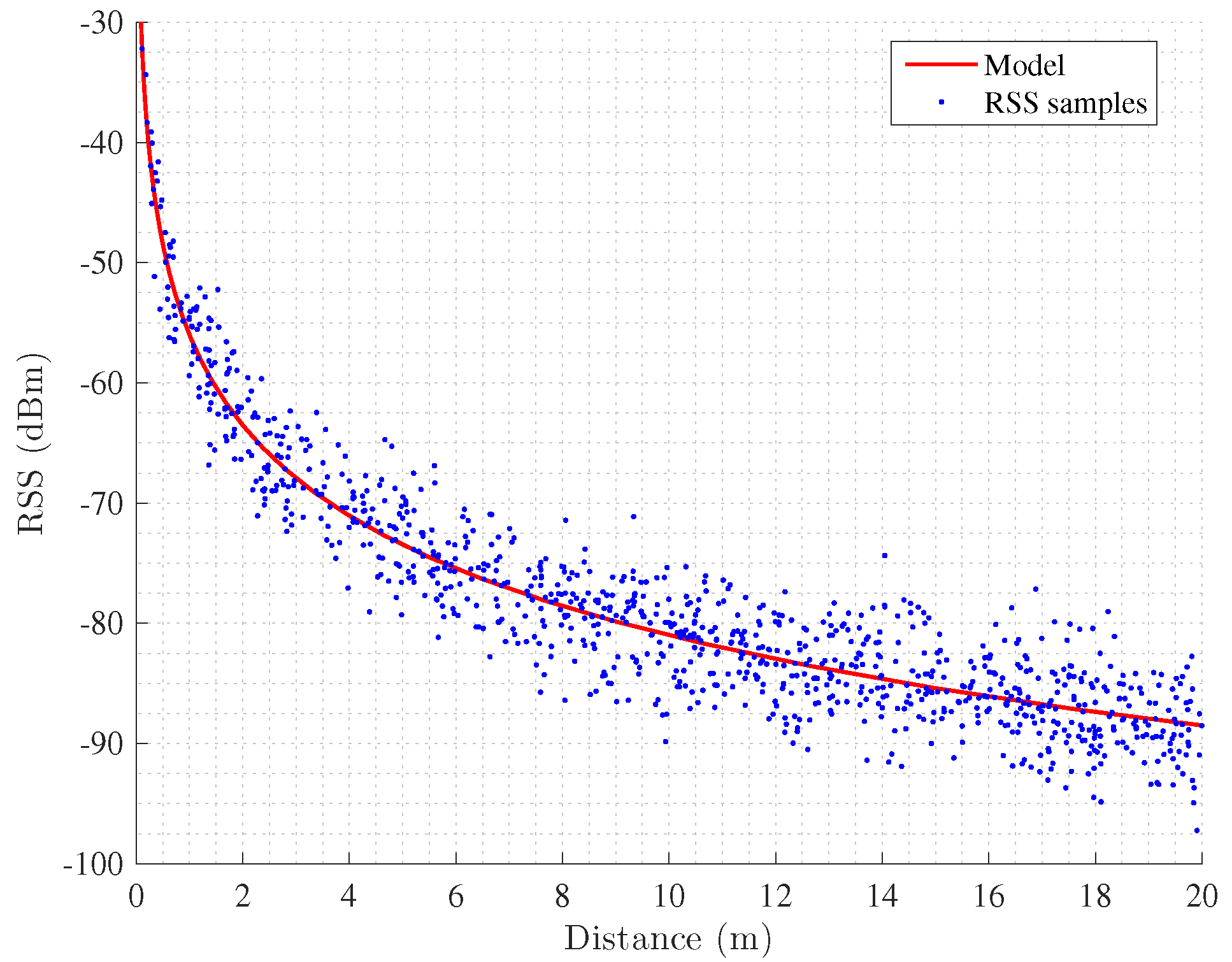
2.1.3. RSS
2.2. Range Free
- Proximity methods: these methods use the connectivity information to infer directly the position of the user based on the number of anchors in the neighbourhood.
- Fingerprinting methods: these methods are based on location dependent characteristics of the signals received from the wireless network. In a first step, a database of the characteristics and the real location where they were measured is collected. Then, in a second step, the position is estimated by selecting the position of the database sample that best matches the real data.
2.2.1. Proximity
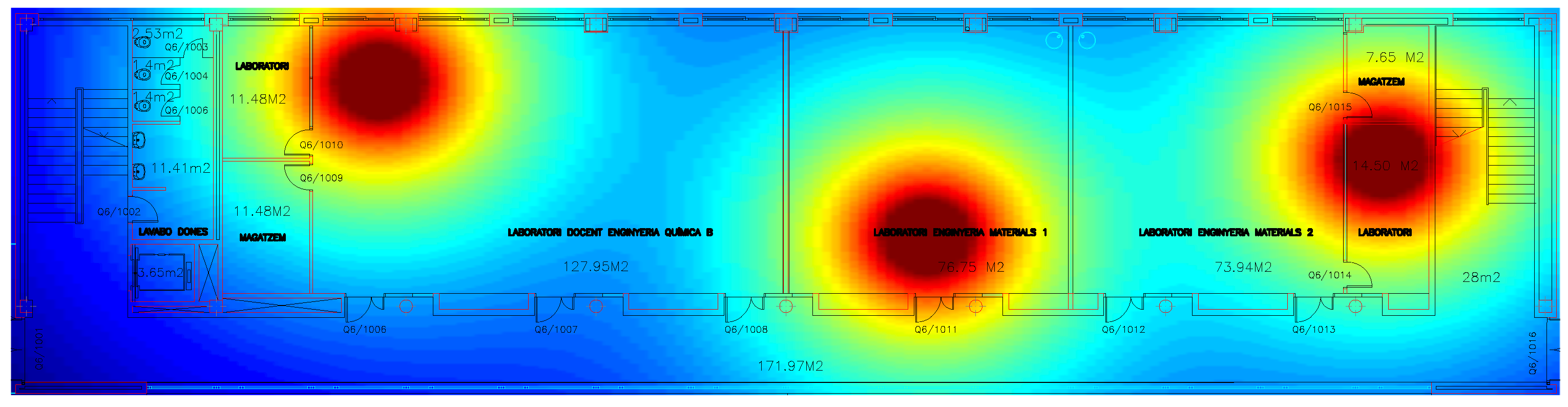
2.2.2. Fingerprinting
3. Inertial Based Systems
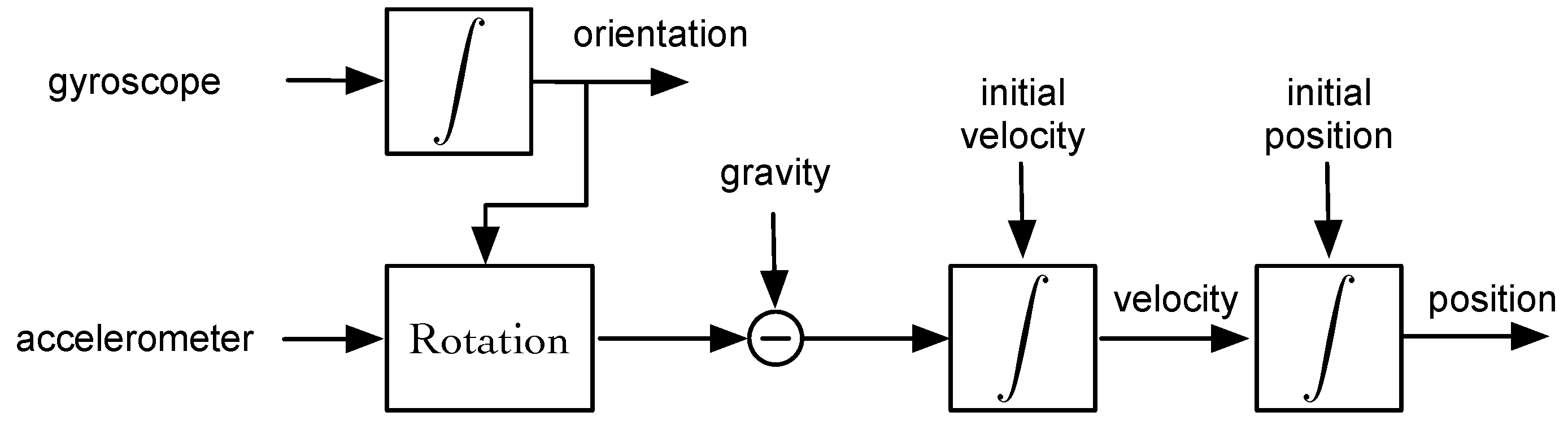
- Strapdown systems: these systems integrate twice the acceleration of the user in order to estimate the position.
- Step and Heading Systems (SHS): these systems estimate the position by adding to the initial position estimation vectors representing the step length and the step heading of the user.
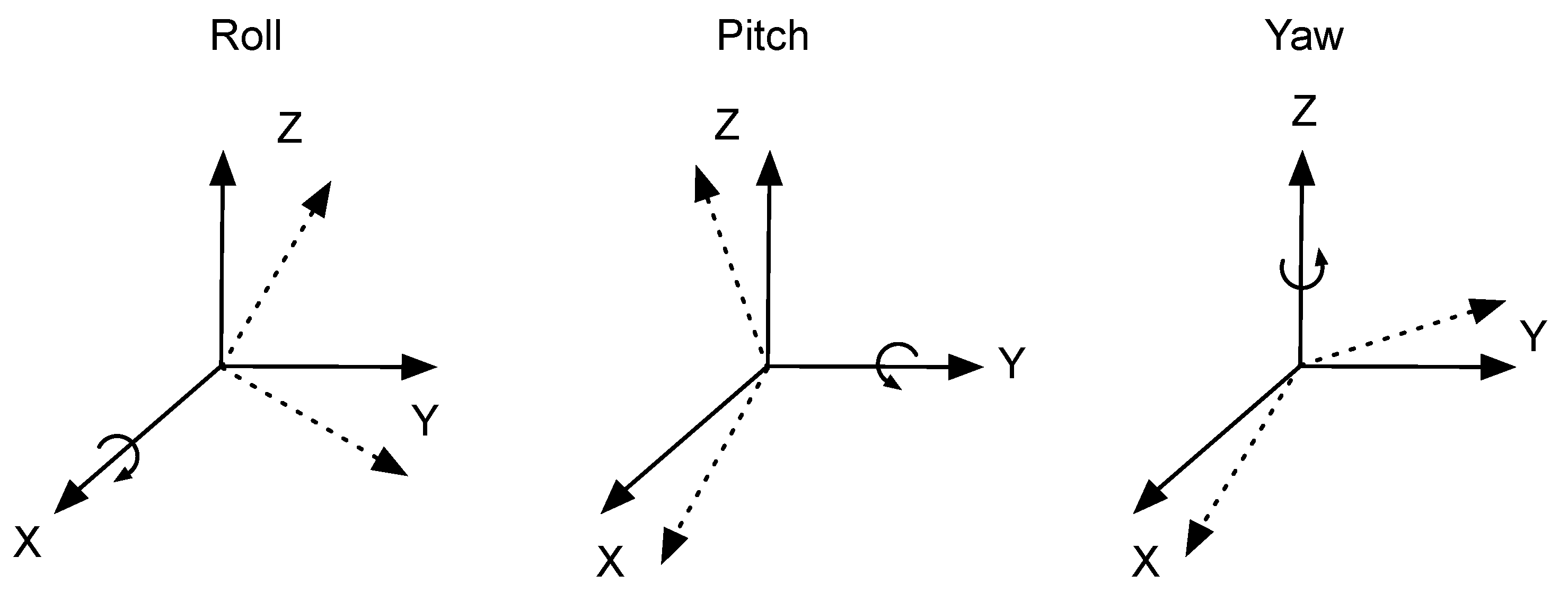
3.1. Strapdown Systems
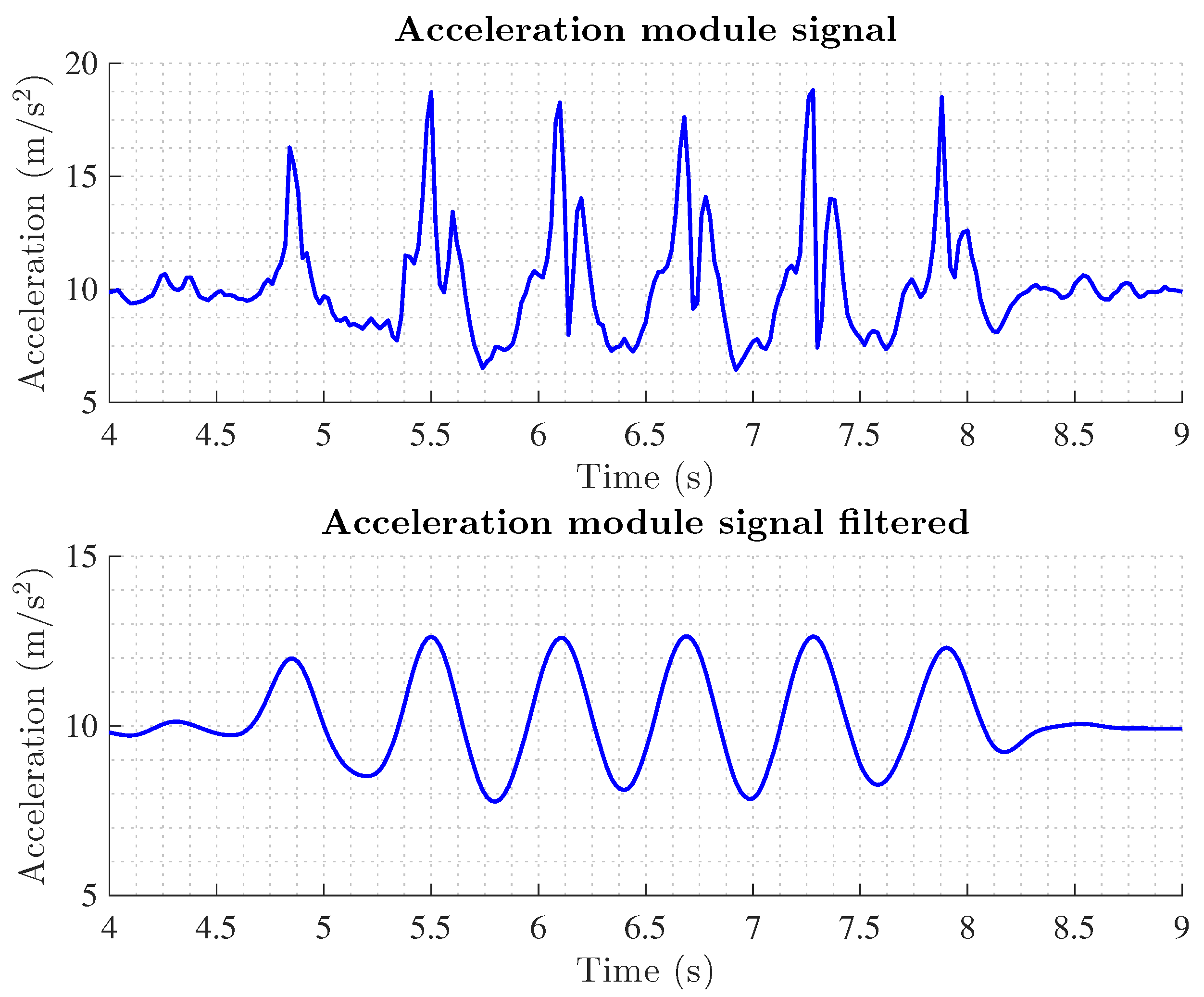
3.2. Step and Heading Systems
- Identification of the subset of data of an individual step.
- Estimation of the step length.
- Estimation of the heading.
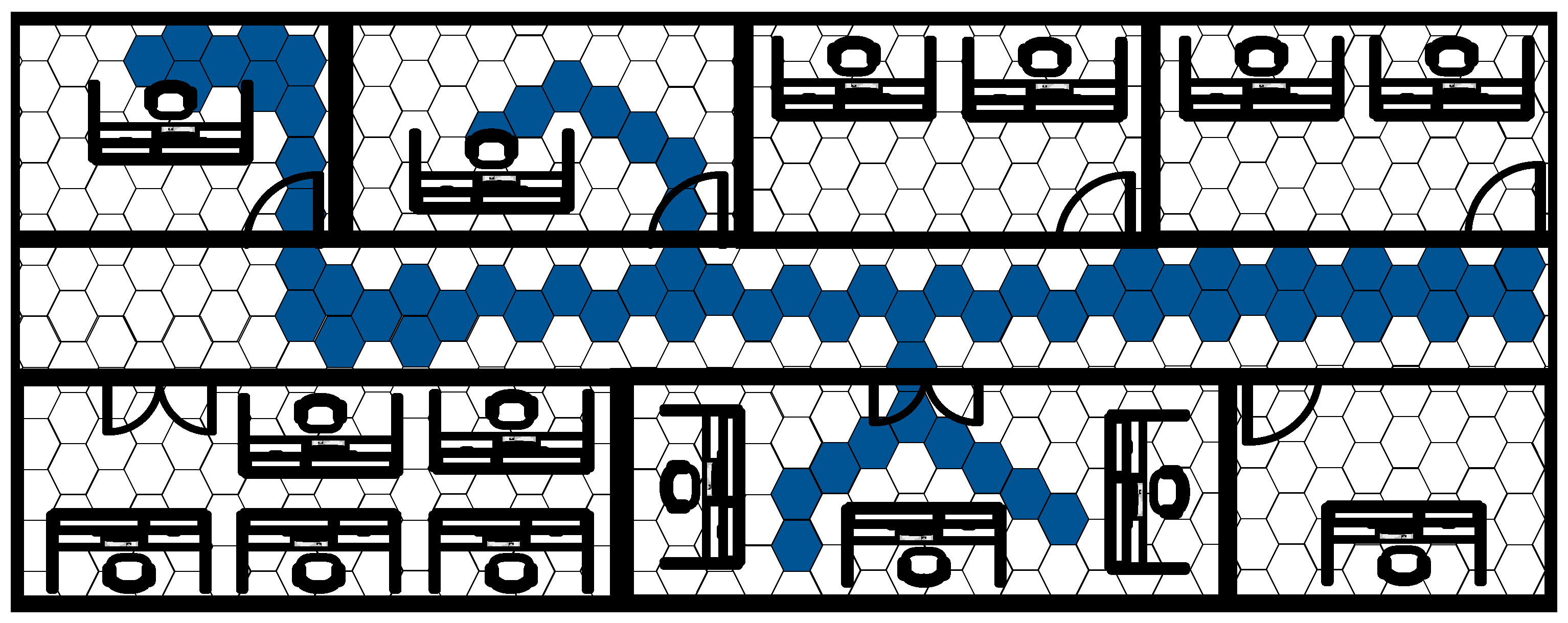
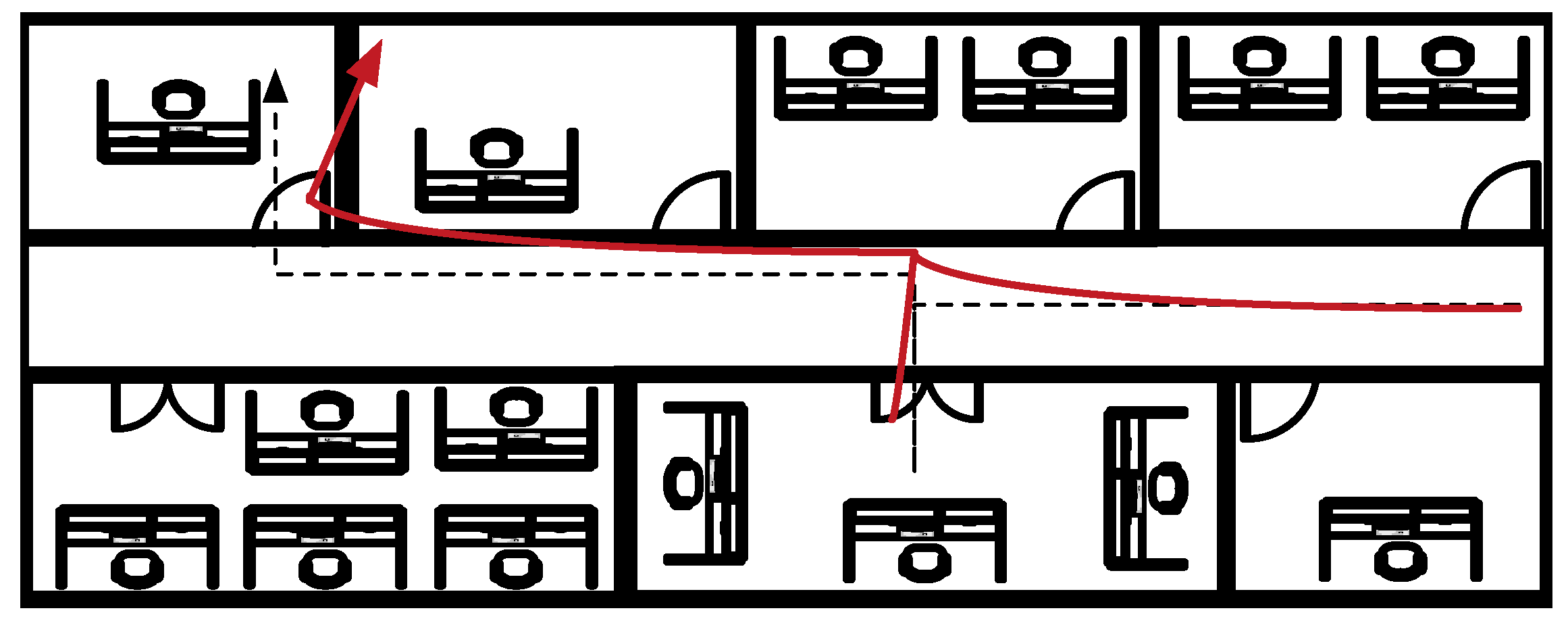
3.3. Simultaneous Localization and Mapping
4. Hybrid Positioning Systems
- RSS-IMU hybrid systems: here we include the methods that combine inertial measurements with RSS measurements either by using a propagation model or a fingerprinting approach.
- Map hybrid systems: here we embrace the methods that in addition to the RSS and/or IMU measurements also use the map of the building to enhance the performance of an IPS.
- Smartphone hybrid systems: here we include those RSS-IMU and Map hybrid systems that have been specifically designed for smartphones.
4.1. RSS-IMU Hybrid Systems
4.2. Map Hybrid Systems
4.3. Smartphone Hybrid Systems
5. Conclusions
Acknowledgments
Conflicts of Interest
References
- Connolly, P.; Boone, D. Indoor Location in Retail: Where Is the Money? Business Models Analysis Report; ABI: London, UK, 2003. [Google Scholar]
- Hightower, J.; Borriello, G. Location Systems for Ubiquitous Computing. Computer 2001, 34, 57–66. [Google Scholar] [CrossRef]
- Pahlavan, K.; Li, X.; Makela, J.P. Indoor geolocation science and technology. IEEE Commun. Mag. 2002, 40, 112–118. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Gu, Y.; Lo, A.; Niemegeers, I. A survey of indoor positioning systems for wireless personal networks. IEEE Commun. Surv. Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Harle, R. A Survey of Indoor Inertial Positioning Systems for Pedestrians. IEEE Commun. Surv. Tutor. 2013, 15, 1281–1293. [Google Scholar] [CrossRef]
- He, S.; Chan, S.H.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2016, 18, 466–490. [Google Scholar] [CrossRef]
- Hossain, A.M.; Soh, W.S. A survey of calibration-free indoor positioning systems. Comput. Commun. 2015, 66, 1–13. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [PubMed]
- Shang, J.; Hu, X.; Gu, F.; Wang, D.; Yu, S. Improvement schemes for indoor mobile location estimation: A survey. Math. Probl. Eng. 2015, 2015. [Google Scholar] [CrossRef]
- Dardari, D.; Closas, P.; Djuric, P.M. Indoor Tracking: Theory, Methods, and Technologies. IEEE Trans. Veh. Technol. 2015, 64, 1263–1278. [Google Scholar] [CrossRef]
- Harter, A.; Hopper, A.; Steggles, P.; Ward, A.; Webster, P. The Anatomy of a Context-aware Application. In Proceedings of the 5th Annual ACM/IEEE International Conference on Mobile Computing and Networking, Seattle, WA, USA, 15–19 August 1999; pp. 59–68. [Google Scholar]
- Priyantha, N.B.; Chakraborty, A.; Balakrishnan, H. The Cricket Location-support System. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking, Boston, MA, USA, 6–11 August 2000; pp. 32–43. [Google Scholar]
- Gezici, S.; Tian, Z.; Giannakis, G.B.; Kobayashi, H.; Molisch, A.F.; Poor, H.V.; Sahinoglu, Z. Localization via ultra-wideband radios: A look at positioning aspects for future sensor networks. IEEE Signal Process. Mag. 2005, 22, 70–84. [Google Scholar] [CrossRef]
- Niculescu, D.; Nath, B. Ad hoc positioning system (APS) using AOA. In Proceedings of the Twenty-Second Annual Joint Conference of the IEEE Computer and Communications Societies, San Francisco, CA, USA, 30 March–3 April 2003; Volume 3, pp. 1734–1743. [Google Scholar]
- Pierlot, V.; Droogenbroeck, M.V. A New Three Object Triangulation Algorithm for Mobile Robot Positioning. IEEE Trans. Robot. 2014, 30, 566–577. [Google Scholar] [CrossRef]
- Patwari, N.; Ash, J.; Kyperountas, S.; Hero, A.O.I.; Moses, R.; Correal, N. Locating the nodes: Cooperative localization in wireless sensor networks. IEEE Signal Process. Mag. 2005, 22, 54–69. [Google Scholar] [CrossRef]
- Li, X. Collaborative Localization With Received-Signal Strength in Wireless Sensor Networks. IEEE Trans. Veh. Technol. 2007, 56, 3807–3817. [Google Scholar]
- Yang, J.; Chen, Y. Indoor Localization Using Improved RSS-Based Lateration Methods. In Proceedings of the 28th IEEE Global Telecommunications Conference on Global telecommunications, Honolulu, HI, USA, 30 November–4 December 2009; pp. 1–6. [Google Scholar]
- Zanella, A. Best Practice in RSS Measurements and Ranging. IEEE Commun. Surv. Tutor. 2016, 18, 2662–2686. [Google Scholar] [CrossRef]
- Patwari, N.; Hero, A.O.; Perkins, M.; Correal, N.S.; O’Dea, R.J. Relative location estimation in wireless sensor networks. IEEE Trans. Signal Process. 2003, 51, 2137–2148. [Google Scholar] [CrossRef]
- Correa, A.; Llado, M.B.; Morell, A.; Vicario, J.L. Indoor Pedestrian Tracking by On-Body Multiple Receivers. IEEE Sens. J. 2016, 16, 2545–2553. [Google Scholar] [CrossRef]
- Palumbo, F.; Barsocchi, P.; Chessa, S.; Augusto, J.C. A stigmergic approach to indoor localization using Bluetooth Low Energy beacons. In Proceedings of the 2015 12th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Karlsruhe, Germany, 25–28 August 2015; pp. 1–6. [Google Scholar]
- Harter, A.; Hopper, A. A distributed location system for the active office. IEEE Netw. 1994, 8, 62–70. [Google Scholar] [CrossRef]
- Bolic, M.; Rostamian, M.; Djuric, P.M. Proximity Detection with RFID: A Step Toward the Internet of Things. IEEE Perv. Comput. 2015, 14, 70–76. [Google Scholar] [CrossRef]
- Bulusu, N.; Heidemann, J.; Estrin, D. GPS-less low-cost outdoor localization for very small devices. IEEE Pers. Commun. 2000, 7, 28–34. [Google Scholar] [CrossRef]
- Lin, X.Y.; Ho, T.W.; Fang, C.C.; Yen, Z.S.; Yang, B.J.; Lai, F. A mobile indoor positioning system based on iBeacon technology. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 4970–4973. [Google Scholar]
- Choi, M.; Park, W.K.; Lee, I. Smart office energy management system using bluetooth low energy based beacons and a mobile app. In Proceedings of the 2015 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 9–12 January 2015; pp. 501–502. [Google Scholar]
- Fujihara, A.; Yanagizawa, T. Proposing an Extended iBeacon System for Indoor Route Guidance. In Proceedings of the 2015 International Conference on Intelligent Networking and Collaborative Systems, Taipei, Taiwan, 2–4 September 2015; pp. 31–37. [Google Scholar]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies, TelAviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Han, D.; Jung, S.; Lee, M.; Yoon, G. Building a Practical Wi-Fi-Based Indoor Navigation System. IEEE Perv. Comput. 2014, 13, 72–79. [Google Scholar]
- Nuño Barrau, G.; Páz-Borrallo, J.M. A New Location Estimation System for Wireless Networks Based on Linear Discriminant Functions and Hidden Markov Models. EURASIP J. Appl. Signal Process. 2006, 2006, 159. [Google Scholar] [CrossRef]
- Subbu, K.P.; Gozick, B.; Dantu, R. Indoor localization through dynamic time warping. In Proceedings of the 2011 IEEE International Conference on Systems, Man, and Cybernetics, Anchorage, AK, USA, 9–12 October 2011; pp. 1639–1644. [Google Scholar]
- Wu, H.; He, S.; Chan, S.H.G. Efficient Sequence Matching and Path Construction for Geomagnetic Indoor Localization. In Proceedings of the 2017 International Conference on Embedded Wireless Systems and Networks, Uppsala, Sweden, 20–22 February 2017; pp. 156–167. [Google Scholar]
- Youssef, M.; Agrawala, A. The Horus WLAN Location Determination System. In Proceedings of the 3rd International Conference on Mobile Systems, Applications, and Services, Seattle, WA, USA, 6–8 June 2005; pp. 205–218. [Google Scholar]
- Madigan, D.; Einahrawy, E.; Martin, R.P.; Ju, W.H.; Krishnan, P.; Krishnakumar, A.S. Bayesian indoor positioning systems. In Proceedings of the IEEE 24th Annual Joint Conference of the IEEE Computer and Communications Societies, Miami, FL, USA, 13–17 March 2005; Volume 2, pp. 1217–1227. [Google Scholar]
- Mirowski, P.; Whiting, P.; Steck, H.; Palaniappan, R.; MacDonald, M.; Hartmann, D.; Ho, T. Probability Kernel Regression for WiFi Localisation. J. Locat. Based Serv. 2012, 6, 81–100. [Google Scholar] [CrossRef]
- Foxlin, E. Pedestrian tracking with shoe-mounted inertial sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef] [PubMed]
- Jiménez, A.; Seco, F.; Prieto, J.; Guevara, J. Indoor pedestrian navigation using an INS/EKF framework for yaw drift reduction and a foot-mounted IMU. In Proceedings of the 2010 7th Workshop on Positioning Navigation and Communication (WPNC), Dresden, Germany, 11–12 March 2010; pp. 135–143. [Google Scholar]
- Zampella, F.; Khider, M.; Robertson, P.; Jiménez, A. Unscented Kalman filter and Magnetic Angular Rate Update (MARU) for an improved Pedestrian Dead-Reckoning. In Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012; pp. 129–139. [Google Scholar]
- Munoz Diaz, E. Inertial pocket navigation system: Unaided 3D positioning. Sensors 2015, 15, 9156–9178. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kang, W.; Han, Y. SmartPDR: Smartphone-based pedestrian dead reckoning for indoor localization. IEEE Sens. J. 2015, 15. [Google Scholar] [CrossRef]
- Jimenez, A.; Seco, F.; Prieto, C.; Guevara, J. A comparison of Pedestrian Dead-Reckoning algorithms using a low-cost MEMS IMU. In Proceedings of the WISP 2009 IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; pp. 37–42. [Google Scholar]
- Angermann, M.; Robertson, P. FootSLAM: Pedestrian Simultaneous Localization and Mapping without Exteroceptive Sensors; Hitchhiking on Human Perception and Cognition. Proc. IEEE 2012, 100, 1840–1848. [Google Scholar] [CrossRef]
- Garcia Puyol, M.; Frassl, M.; Robertson, P. Collaborative Mapping for Pedestrian Navigation in Security Applications. In Proceedings of the 7th Security Research Conference on Future Security 2012, Bonn, Germany, 4–6 September 2012; Aschenbruck, N., Martini, P., Meier, M., Tölle, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 49–60. [Google Scholar]
- Kaiser, S.; Diaz, E.M. PocketSLAM based on the principle of the FootSLAM algorithm. In Proceedings of the 2015 International Conference on Location and GNSS (ICL-GNSS), Gothenburg, Sweden, 22–24 June 2015; pp. 1–5. [Google Scholar]
- Frank, K.; Krach, B.; Catterall, N.; Robertson, P. Development and Evaluation of a Combined WLAN & Inertial Indoor Pedestrian Positioning System. In Proceedings of the 22nd International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2009), Savannah, GA, USA, 22–25 September 2009. [Google Scholar]
- Schmid, J.; Gadeke, T.; Stork, W.; Muller-Glaser, K. On the fusion of inertial data for signal strength localization. In Proceedings of the 2011 8th Workshop on Positioning Navigation and Communication (WPNC), Dresden, Germany, 7–8 April 2011; pp. 7–12. [Google Scholar]
- Tarrio, P.; Besada, J.; Casar, J. Fusion of RSS and inertial measurements for calibration-free indoor pedestrian tracking. In Proceedings of the 2013 16th International Conference on Information Fusion (FUSION), Istanbul, Turkey, 9–12 July 2013; pp. 1458–1464. [Google Scholar]
- Jimenez, A.R.; Granja, F.S.; Honorato, J.C.P.; Rosas, J.I.G. Accurate Pedestrian Indoor Navigation by Tightly Coupling Foot-Mounted IMU and RFID Measurements. IEEE Trans. Instrum. Measur. 2012, 61, 178–189. [Google Scholar] [CrossRef] [Green Version]
- Evennou, F.; Marx, F. Advanced Integration of WIFI and Inertial Navigation Systems for Indoor Mobile Positioning. EURASIP J. Appl. Signal Process. 2006, 2006, 164. [Google Scholar] [CrossRef]
- Woodman, O.; Harle, R. Pedestrian Localisation for Indoor Environments. In Proceedings of the 10th International Conference on Ubiquitous Computing, Seoul, Korea, 21–24 September 2008; pp. 114–123. [Google Scholar]
- Wang, H.; Lenz, H.; Szabo, A.; Bamberger, J.; Hanebeck, U. WLAN-Based Pedestrian Tracking Using Particle Filters and Low-Cost MEMS Sensors. In Proceedings of the WPNC ’07, 4th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 22 March 2007; pp. 1–7. [Google Scholar]
- Klingbeil, L.; Wark, T. A Wireless Sensor Network for Real-Time Indoor Localisation and Motion Monitoring. In Proceedings of the IPSN ’08, International Conference on Information Processing in Sensor Networks, St. Louis, MO, USA, 22–24 April 2008; pp. 39–50. [Google Scholar]
- Stockx, T.; Hecht, B.; Schöning, J. SubwayPS: Towards Smartphone Positioning in Underground Public Transportation Systems. In Proceedings of the 22nd ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Dallas, TX, USA, 4–7 November 2014; pp. 93–102. [Google Scholar]
- Pei, L.; Liu, J.; Guinness, R.; Chen, Y.; Kuusniemi, H.; Chen, R. Using LS-SVM based motion recognition for smartphone indoor wireless positioning. Sensors 2012, 12, 6155–6175. [Google Scholar] [CrossRef] [PubMed]
- Faragher, R.; Harle, R. SmartSLAM—An efficient smartphone indoor positioning system exploiting machine learning and opportunistic sensing. In Proceedings of the 26th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2013), Nashville, TN, USA, 16–20 September 2013; pp. 1006–1019. [Google Scholar]
- Faragher, R.M.; Harle, R.K. Towards an efficient, intelligent, opportunistic smartphone indoor positioning system. Navigation 2015, 62, 55–72. [Google Scholar] [CrossRef]
- Liu, J.; Chen, R.; Pei, L.; Guinness, R.; Kuusniemi, H. A hybrid smartphone indoor positioning solution for mobile LBS. Sensors 2012, 12, 17208–17233. [Google Scholar] [CrossRef] [PubMed]
- Radu, V.; Marina, M.K. HiMLoc: Indoor smartphone localization via activity aware Pedestrian Dead Reckoning with selective crowdsourced WiFi fingerprinting. In Proceedings of the 2013 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Montbeliard-Belfort, France, 28–31 October 2013; pp. 1–10. [Google Scholar]
- Moder, T.; Wisiol, K.; Hafner, P.; Wieser, M. Smartphone-based indoor positioning utilizing motion recognition. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Calgary, AB, Canada, 13–16 October 2015; pp. 1–8. [Google Scholar]
- Chen, Z.; Zou, H.; Jiang, H.; Zhu, Q.; Soh, Y.C.; Xie, L. Fusion of WiFi, smartphone sensors and landmarks using the Kalman filter for indoor localization. Sensors 2015, 15, 715–732. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Zhang, P.; Lan, H.; Zhuang, Y.; Niu, X.; El-Sheimy, N. A modularized real-time indoor navigation algorithm on smartphones. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Calgary, AB, Canada, 13–16 October 2015; pp. 1–7. [Google Scholar]
- Correa, A.; Barcelo, M.; Morell, A.; Vicario, J.L. Enhanced Inertial-Aided Indoor Tracking System for Wireless Sensor Networks: A Review. IEEE Sens. J. 2014, 14, 2921–2929. [Google Scholar] [CrossRef]
- Zou, H.; Chen, Z.; Jiang, H.; Xie, L.; Spanos, C. Accurate indoor localization and tracking using mobile phone inertial sensors, WiFi and iBeacon. In Proceedings of the 2017 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Kauai, HI, USA, 27–30 March 2017; pp. 1–4. [Google Scholar]
- Chen, Z.; Zhu, Q.; Soh, Y.C. Smartphone Inertial Sensor-Based Indoor Localization and Tracking with iBeacon Corrections. IEEE Trans. Ind. Inform. 2016, 12, 1540–1549. [Google Scholar] [CrossRef]
- Correa, A.; Munoz Diaz, E.; Bousdar Ahmed, D.; Morell, A.; Lopez Vicario, J. Advanced Pedestrian Positioning System to Smartphones and Smartwatches. Sensors 2016, 16, 1903. [Google Scholar] [CrossRef] [PubMed]
- Boukerche, A.; Oliveira, H.; Nakamura, E.; Loureiro, A. Localization systems for wireless sensor networks. Wirel. Commun. IEEE 2007, 14, 6–12. [Google Scholar] [CrossRef]
- Shen, Y.; Win, M. Fundamental Limits of Wideband Localization; Part I: A General Framework. IEEE Trans. Inf. Theory 2010, 56, 4956–4980. [Google Scholar] [CrossRef]
- Shen, Y.; Wymeersch, H.; Win, M. Fundamental Limits of Wideband Localization; Part II: Cooperative Networks. IEEE Trans. Inf. Theory 2010, 56, 4981–5000. [Google Scholar] [CrossRef]
- Cui, X.; Gulliver, T.A.; Li, J.; Zhang, H. Vehicle Positioning Using 5G Millimeter-Wave Systems. IEEE Access 2016, 4, 6964–6973. [Google Scholar] [CrossRef]
- Mao, G.; Fidan, B.; Anderson, B.D. Wireless sensor network localization techniques. Comput. Netw. 2007, 51, 2529–2553. [Google Scholar] [CrossRef]
- Singh, S.; Aggarwal, A. Article: Survey on Localization Techniques of RFID for IOT. Int. J. Comput. Appl. 2016, 137, 23–27. [Google Scholar]
- Bouet, M.; dos Santos, A.L. RFID tags: Positioning principles and localization techniques. In Proceedings of the 2008 1st IFIP Wireless Days, Dubai, United Arab Emirates, 24–27 November 2008; pp. 1–5. [Google Scholar]
- Zhou, J.; Shi, J. RFID localization algorithms and applications—A review. J. Intell. Manuf. 2008, 20, 695. [Google Scholar] [CrossRef]
- Wu, C.L.; Fu, L.C.; Lian, F.L. WLAN location determination in e-home via support vector classification. In Proceedings of the 2004 IEEE International Conference on Networking, Sensing and Control, Taipei, Taiwan, 21–23 March 2004; Volume 2, pp. 1026–1031. [Google Scholar]
- Chung, J.; Donahoe, M.; Schmandt, C.; Kim, I.J.; Razavai, P.; Wiseman, M. Indoor Location Sensing Using Geo-magnetism. In Proceedings of the 9th International Conference on Mobile Systems, Applications and Services, Bethesda, MD, USA, 28 June–1 July 2011; pp. 141–154. [Google Scholar]
- Li, B.; Gallagher, T.; Dempster, A.G.; Rizos, C. How feasible is the use of magnetic field alone for indoor positioning? In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012; pp. 1–9. [Google Scholar]
- Merry, L.A.; Faragher, R.M.; Scheding, S. Comparison of Opportunistic Signals for Localisation. IFAC Proc. Vol. 2010, 43, 109–114. [Google Scholar] [CrossRef]
- Dil, B.J.; Havinga, P.J.M. On the calibration and performance of RSS-based localization methods. In Proceedings of the 2010 Internet of Things (IOT), Tokyo, Japan, 29 November–1 December 2010; pp. 1–8. [Google Scholar]
- Khalajmehrabadi, A.; Gatsis, N.; Akopian, D. Modern WLAN Fingerprinting Indoor Positioning Methods and Deployment Challenges. IEEE Commun. Surv. Tutor. 2017. [Google Scholar] [CrossRef]
- Jung, S.H.; Moon, B.C.; Han, D. Performance Evaluation of Radio Map Construction Methods for Wi-Fi Positioning Systems. IEEE Trans. Intell. Transp. Syst. 2017, 18, 880–889. [Google Scholar] [CrossRef]
- Pedley, M. Tilt sensing using a three-axis accelerometer. Freescale Semicond. Appl. Note 2013, 1, 2012–2013. [Google Scholar]
- Woodman, O.J. An Introduction to Inertial Navigation; Technical Report; UCAM-CL-TR-696; Computer Laboratory, University of Cambridge: Cambridge, UK, 2007; ISSN 1476-2986. [Google Scholar]
- Titterton, D.; Weston, J.L. Strapdown Inertial Navigation Technology; Electromagnetics and Radar Series; Institution of Engineering and Technology: London, UK, 2004. [Google Scholar]
- Rajagopal, S. Personal Dead Reckoning System with Shoe Mounted Inertial Sensors. Master’s Thesis, KTH, Stockholm, Sweden, 2008. [Google Scholar]
- Borenstein, J.; Ojeda, L.; Kwanmuang, S. Heuristic reduction of gyro drift in IMU-based personnel tracking systems. Proc. SPIE 2009, 7306, 73061H. [Google Scholar]
- Ladetto, Q. On foot navigation: Continuous step calibration using both complementary recursive prediction and adaptive Kalman filtering. In Proceedings of the 13th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–22 September 2000; pp. 1735–1740. [Google Scholar]
- Beauregard, S. A Helmet-Mounted Pedestrian Dead Reckoning System. In Proceedings of the 3rd International Forum on Applied Wearable Computing, Bremen, Germany, 15–16 March 2006; pp. 1–11. [Google Scholar]
- Lee, S.W.; Mase, K. Recognition of walking behaviors for pedestrian navigation. In Proceedings of the 2001 IEEE International Conference on Control Applications, Mexico City, Mexico, 7 September 2001; pp. 1152–1155. [Google Scholar]
- Levi, R.; Judd, T. Dead Reckoning Navigational System Using Accelerometer to Measure Foot Impacts. U.S. Patent 5,583,776, 10 December 1996. [Google Scholar]
- Weinberg, H. Using the ADXL202 in pedometer and personal navigation applications. Analog Devices AN 602 Appl. Note 2002, 2, 1–6. [Google Scholar]
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef]
- Bailey, T.; Durrant-Whyte, H. Simultaneous localization and mapping (SLAM): Part II. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef]
- Smith, A.; Balakrishnan, H.; Goraczko, M.; Priyantha, N. Tracking moving devices with the cricket location system. In Proceedings of the 2nd International Conference on Mobile Systems, Applications and Services, Boston, MA, USA, 6–9 June 2004; pp. 190–202. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Type | Cost | Scalability | Anchors | Area () | Error | |
|---|---|---|---|---|---|---|---|
| Type | Value | ||||||
| Harter et al. [12] | Time | Expensive | Limited | 100 | 280 | 95th | 0.09 m |
| Priyantha et al. [13,95] | Time | Medium | Limited | 6 | <10 | 90th | 0.3 m |
| Correa et al. [22] | RSS | Low | Yes | 6 | 530 | RMSE | 1.4 m |
| Palumbo et al. [23] | RSS | Low | Yes | 8 | 36 | 75th | 1.8 m |
| Yang et al. [19] | RSS | Low | Yes | 5 | 3400 | median | 3 m |
| Lin et al. [27] | Proximity | Low | Yes | 12 | 300 | room detection | 97.2 % |
| Bolic et al. [25] | Proximity | Low | Yes | 24 | 8 | RMSE | 0.32 m |
| Bahl et al. [30] | Fingerprinting | Medium | Limited | 3 | 980 | 75th | 4.69 m |
| Han et al. [31] | Fingerprinting | Medium | Limited | 3400 | 192,200 | 75th | 3–9 m |
| Youssef et al. [35] | Fingerprinting | Medium | Limited | 21 | 1700 | 90th | 1.4 m |
| Wu et al. [34] | Magnetic fingerprinting | Low | Limited | 0 | 4000 | 90th | 2.5 m |
| Foxlin et al. [38] | Inertial | Low | Yes | 0 | 75 | % travelled path | 0.3 % |
| Jimenez et al. [39] | Inertial | Low | Yes | 0 | 3600 | % travelled path | 0.3–1.5 % |
| Angermann et al. [44] | Inertial | Low | Limited | 0 | 600 | RMSE | 1–2 m |
| System | Accuracy | Drift | Cost | Calibration | Integration with Network | Hardware | Scalability problems | |
|---|---|---|---|---|---|---|---|---|
| Computational | Monetary | |||||||
| Time | High | No | Low | Medium | No | Yes | Transceiver, accurate clocks | Synchronisation |
| Angle | High | No | Low | Medium | No | Yes | Transceiver, multiple antennas | Synchronisation |
| RSS | Low | No | Low | Low | Easy | No | Transceiver | No |
| Proximity | Poor | No | Low | Low | No | No | Transceiver | No |
| Fingerprinting | Medium | No | High | Low | Laborious | No | Transceiver | Calibration |
| PDR | High | Yes | Medium | Low | No | No | IMU | No |
| SLAM | High | Closed loops | High | Low | No | No | IMU | No |
| System | Technologies | RSS | IMU | Anchors | Area () | Error (m) | Cost | Scalability | |
|---|---|---|---|---|---|---|---|---|---|
| Position | Method | ||||||||
| Frank et al. [47] | WiFi, MEMS | Fingerprinting | Foot | SHS | 11 | Floor | 1.65 | Medium | Limited by calibration |
| Schmid et al. [48] | WSN, MEMS | Propagation model | Hip | SHS | 62 | 1125 | 4 | Low | Yes |
| Tarrío et al. [49] | WSN, MEMS | Propagation model | Waist | SHS | 9 | 100 | 2.3 | Low | Yes |
| Correa et al. [64] | WSN, MEMS | Propagation model | Waist | SHS | 8 | 155 | 0.9 | Low | Yes |
| Jiménez et al. [50] | RFID, MEMS | Propagation model | Foot | Strapdown | 71 | 2200 | 1.35 | Low | Yes |
| System | Technologies | RSS | IMU | Anchors | Area () | Error | Cost | Scalability | ||
|---|---|---|---|---|---|---|---|---|---|---|
| Position | Method | Type | Value (m) | |||||||
| Evennou et al. [51] | WiFi, MEMS | Fingerprinting | Belt | SHS | 4 | 1600 | RMSE | 1.53 | Medium | Limited by calibration |
| Woodman et al. [52] | WiFi, MEMS | Fingerprinting | Foot | SHS | 33 | 8725 | 90th | 0.73 | Medium | Limited by calibration |
| Wang et al. [53] | WiFi, MEMS | Fingerprinting | N/A | Step | 5 | 1000 | RMSE | 4.3 | Medium | Limited by calibration |
| Klingbeil et al. [54] | WSN, MEMS | Proximity | Belt | SHS | 9 | Floor | RMSE | 1.2 | Low | Yes |
| System | Technologies | Fusion Method | Area () | Error | Cost | Scalability | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| WiFi | IMU | Magnetic | Map | Type | Value (m) | |||||
| Pei et al. [56] | Yes | Yes | No | No | HMM | Building | RMSE | 4.55 | Medium | Limited by calibration |
| Faragher et al. [57] | Yes | Yes | Yes | Yes | SLAM | 450 | 95th | 2.7 | Medium | Limited by calibration and complexity |
| Liu et al. [59] | Yes | Yes | No | Yes | HMM | Floor | RMSE | 3.1 | Medium | Limited by calibration |
| Radu et al. [60] | Yes | Yes | No | Yes | PF | Floor | 90th | 6 | Medium | Limited by calibration |
| Moder et al. [61] | Yes | Yes | No | Yes | PF | Building | 90th | 2.3 | Medium | Limited by calibration |
| Chen et al. [62] | Yes | Yes | No | Yes | KF | 3800 | RMSE | 1 | Medium | Limited by calibration |
| Li et al. [63] | Yes | Yes | Yes | No | EKF | 8400 | RMSE | 2.9 | Medium | Limited by calibration |
| Correa et al. [67] | Yes | Yes | No | No | EKF | 6000 | RMSE | 1.4–3.4 | Low | Yes |
| Zou et al. [65] | Yes | Yes | No | No | PF | 600 | Mean | 0.6 | Medium | Limited by calibration |
| Chen et al. [66] | Yes | Yes | No | Yes | KF | 425 | RMSE | 1.28 | Low | Yes |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Correa, A.; Barcelo, M.; Morell, A.; Vicario, J.L. A Review of Pedestrian Indoor Positioning Systems for Mass Market Applications. Sensors 2017, 17, 1927. https://doi.org/10.3390/s17081927
Correa A, Barcelo M, Morell A, Vicario JL. A Review of Pedestrian Indoor Positioning Systems for Mass Market Applications. Sensors. 2017; 17(8):1927. https://doi.org/10.3390/s17081927
Chicago/Turabian StyleCorrea, Alejandro, Marc Barcelo, Antoni Morell, and Jose Lopez Vicario. 2017. "A Review of Pedestrian Indoor Positioning Systems for Mass Market Applications" Sensors 17, no. 8: 1927. https://doi.org/10.3390/s17081927