A Platform with Multiple Head-Mounted Displays for Advanced Training in Modern Driving Schools

 ,
,
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Problem Description and Call for Action
- Simultaneous training sessionsAs it is expected to conduct extensive and time-consuming training sessions with advanced vehicle systems, the training system should allow the participation of several drivers simultaneously.
- Feasible and cost-effective solutionThe entire training system should remain cost-effective for driving schools. That is, it should not depend on expensive simulator components. Moreover, the training system should impose only feasible space requirements.
- Training with advanced vehicle systemsThe training system should support the training with advanced vehicle technologies, such as highly and fully automated assistance functions.
- More immersion and engaging virtual scenesRealistic virtual replicas of the vehicle interior, user interface, and surrounding traffic participants should be provided by the training system to increase immersion and ensure engaging training sessions for drivers.
- Interactive supervision and instruction of driversThe training system should provide a capability for close accompanying supervision and the instruction of trainees. Instructors at driving schools still should be able to carry out their usual supervisory and instruction roles.
3. Proposed Concept and Solution
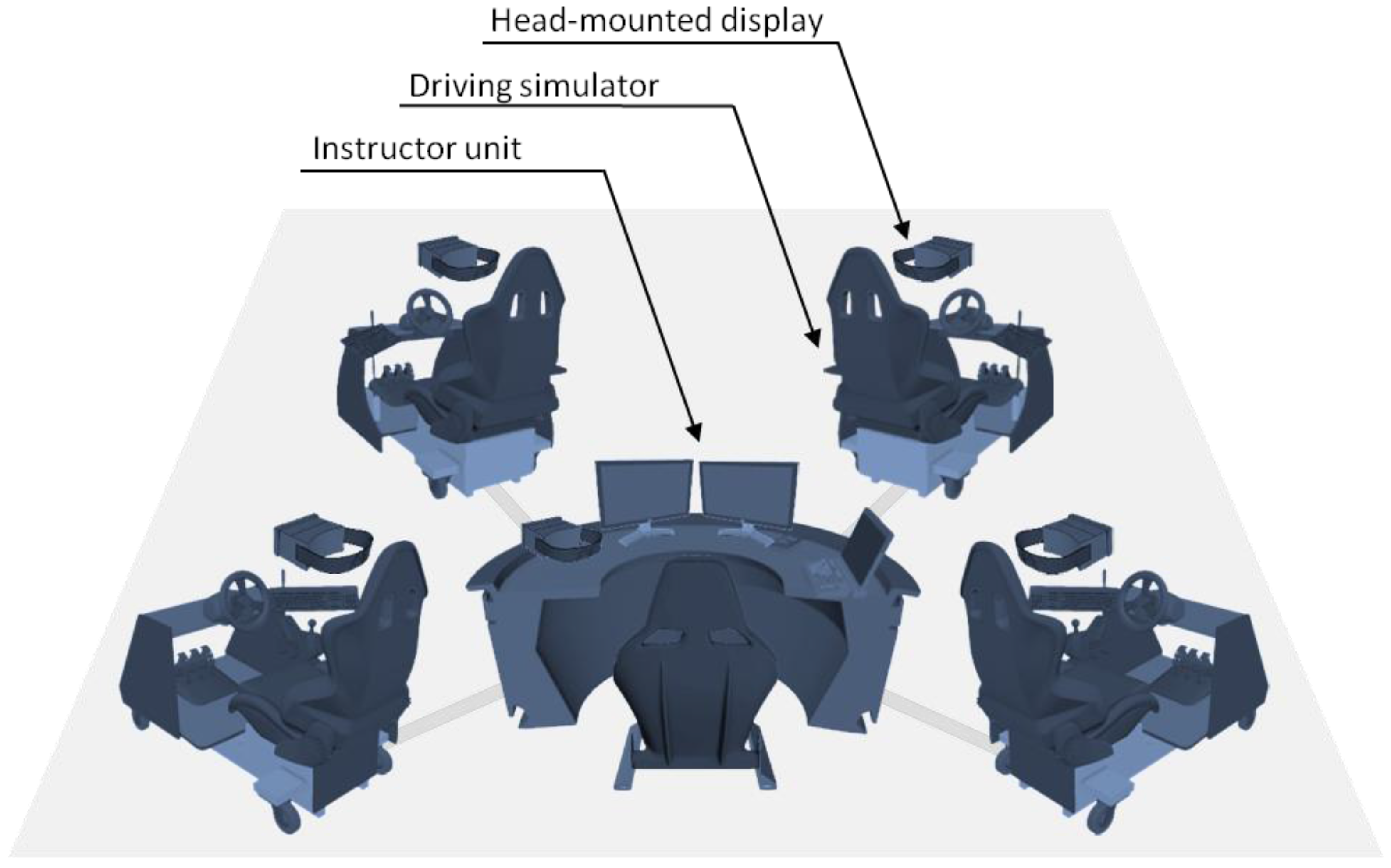
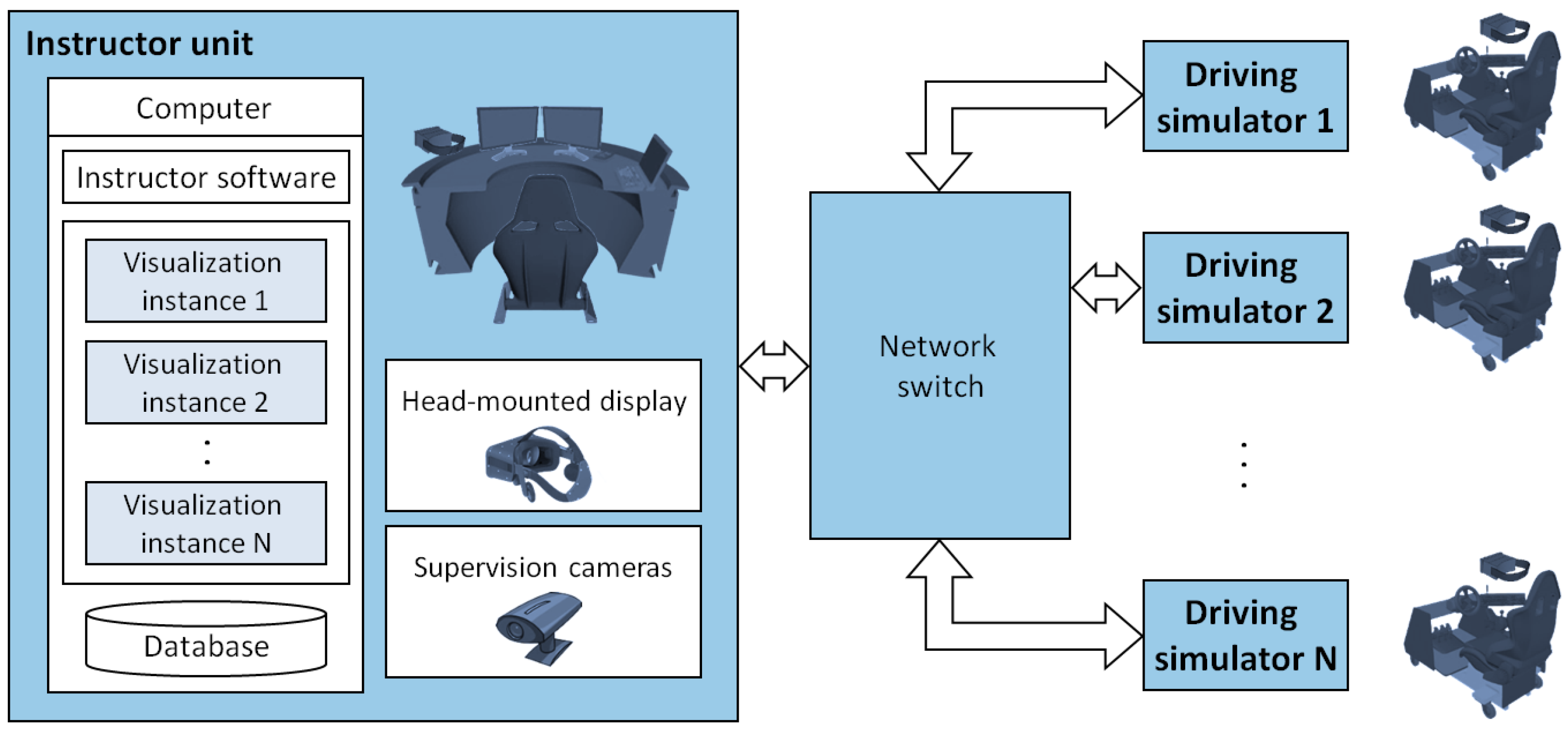
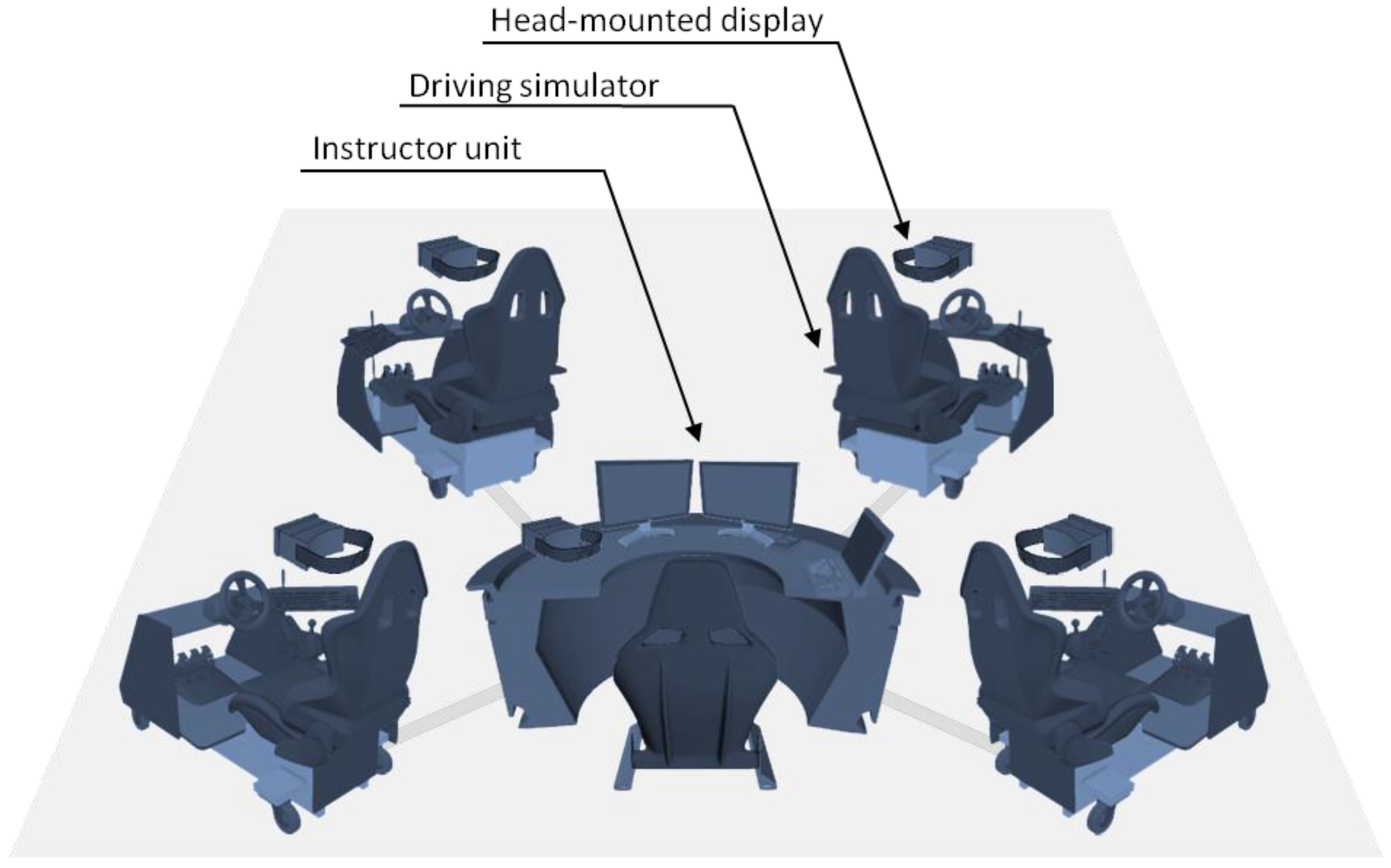
4. System Architecture
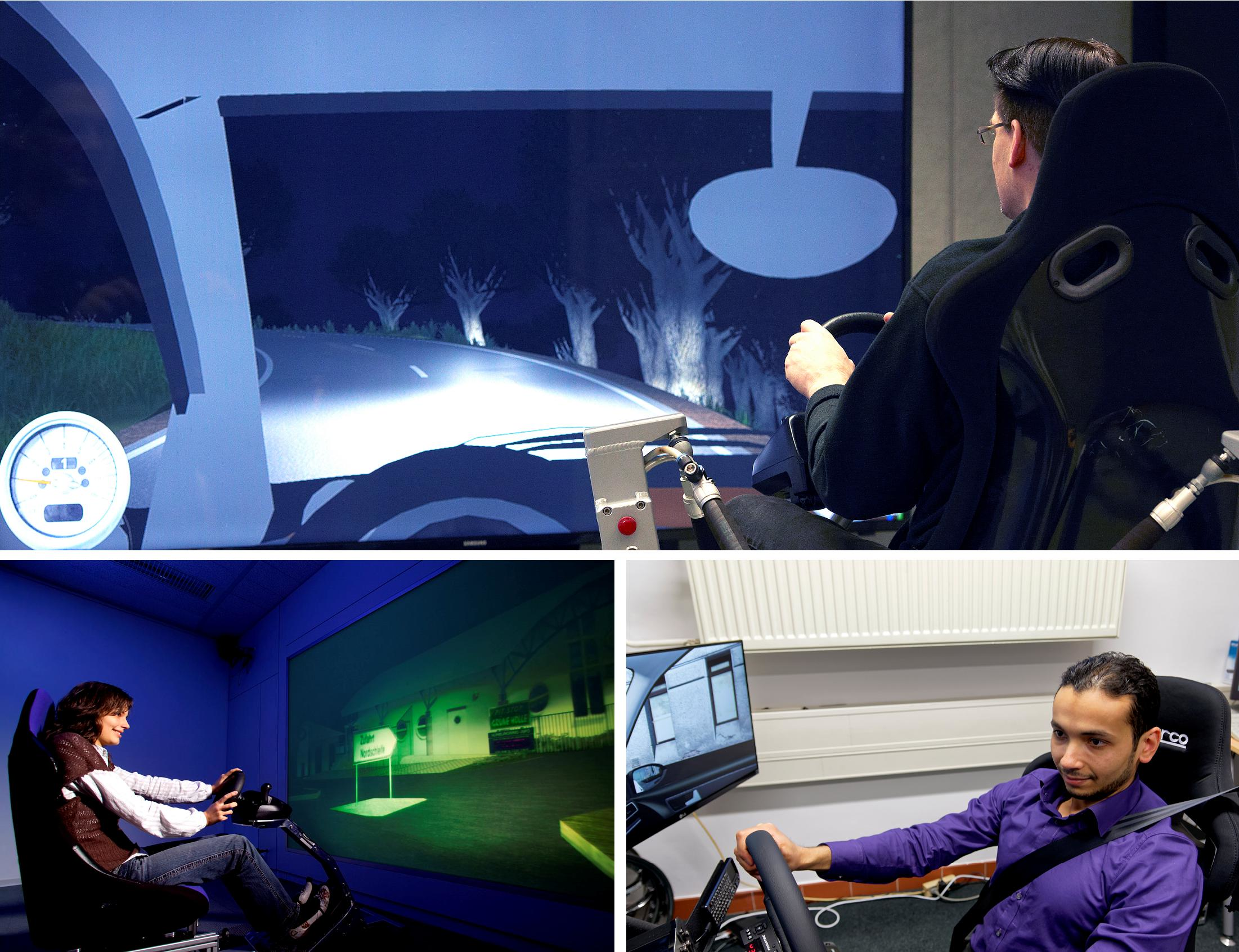
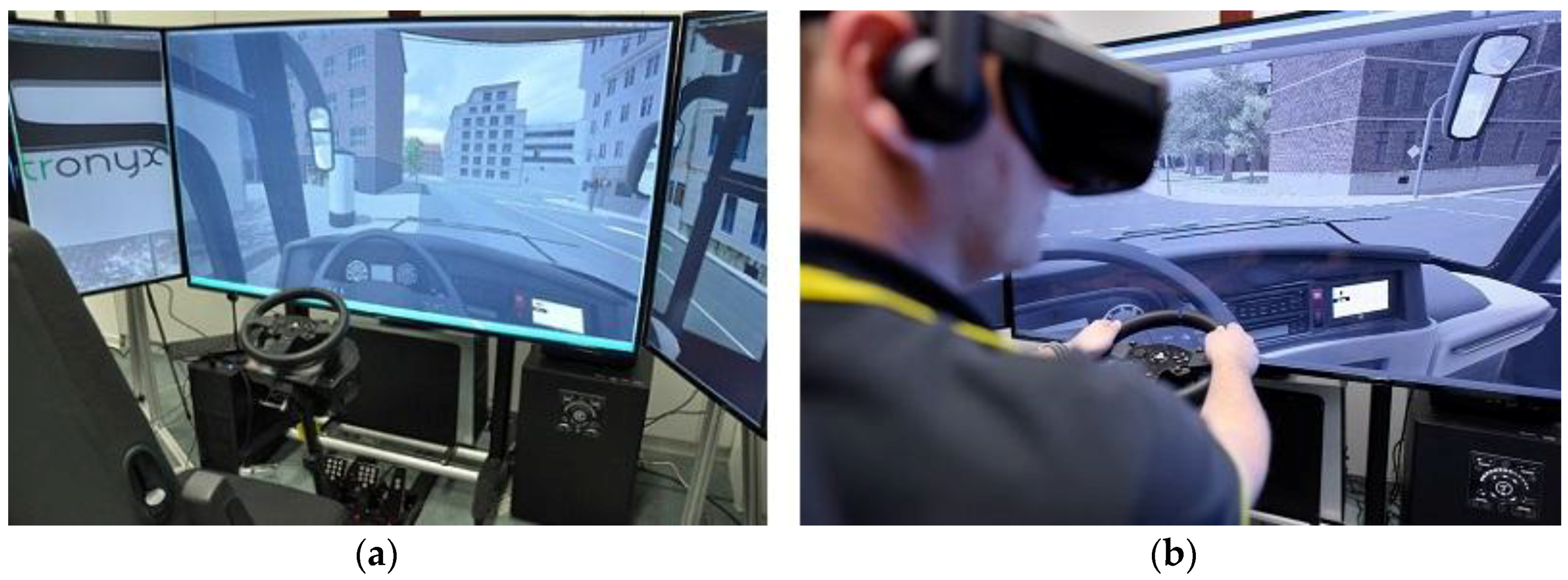
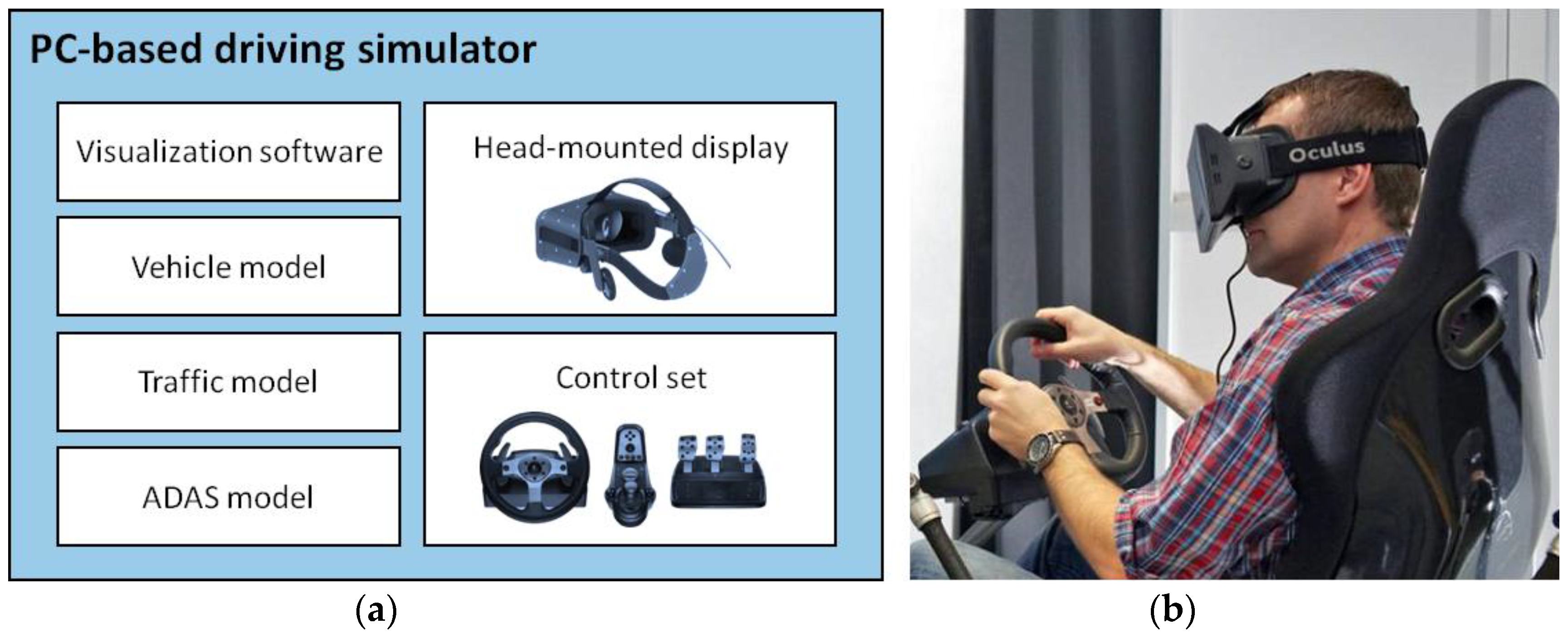
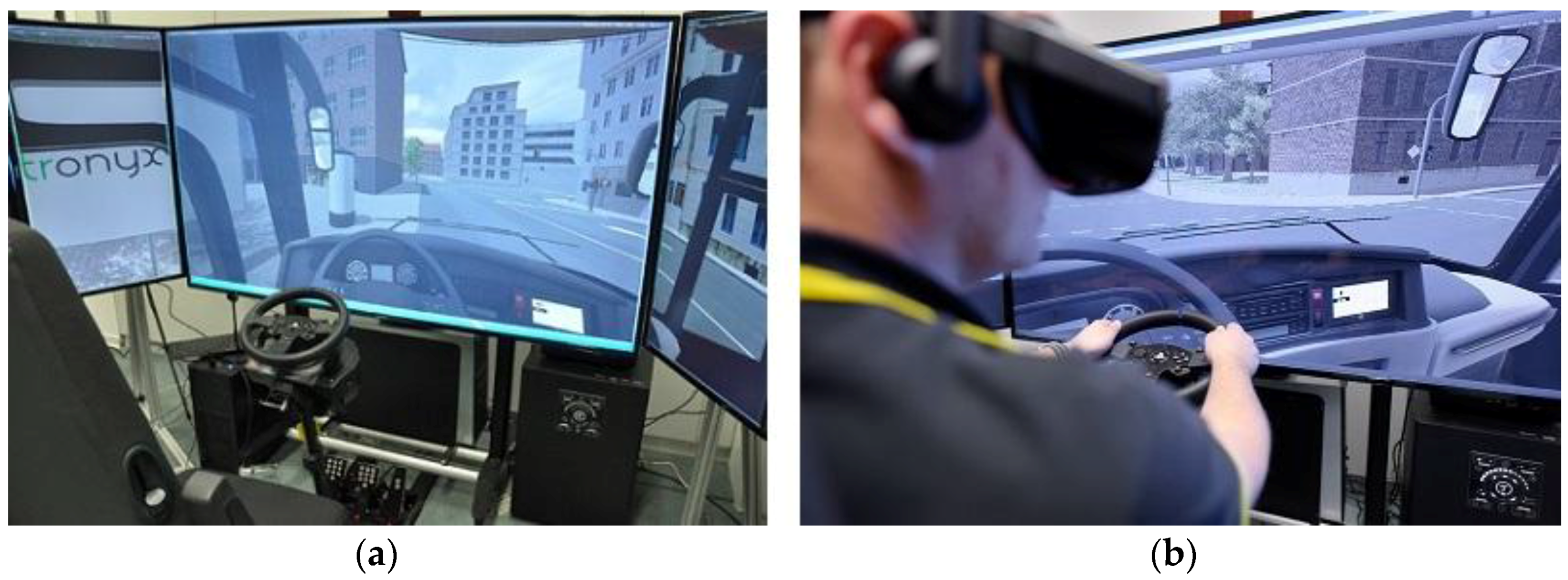
4.1. Utilized Driving Simulators
4.1.1. Visualization Software
4.1.2. Vehicle Physics Simulation Model
4.1.3. Traffic Simulation Model
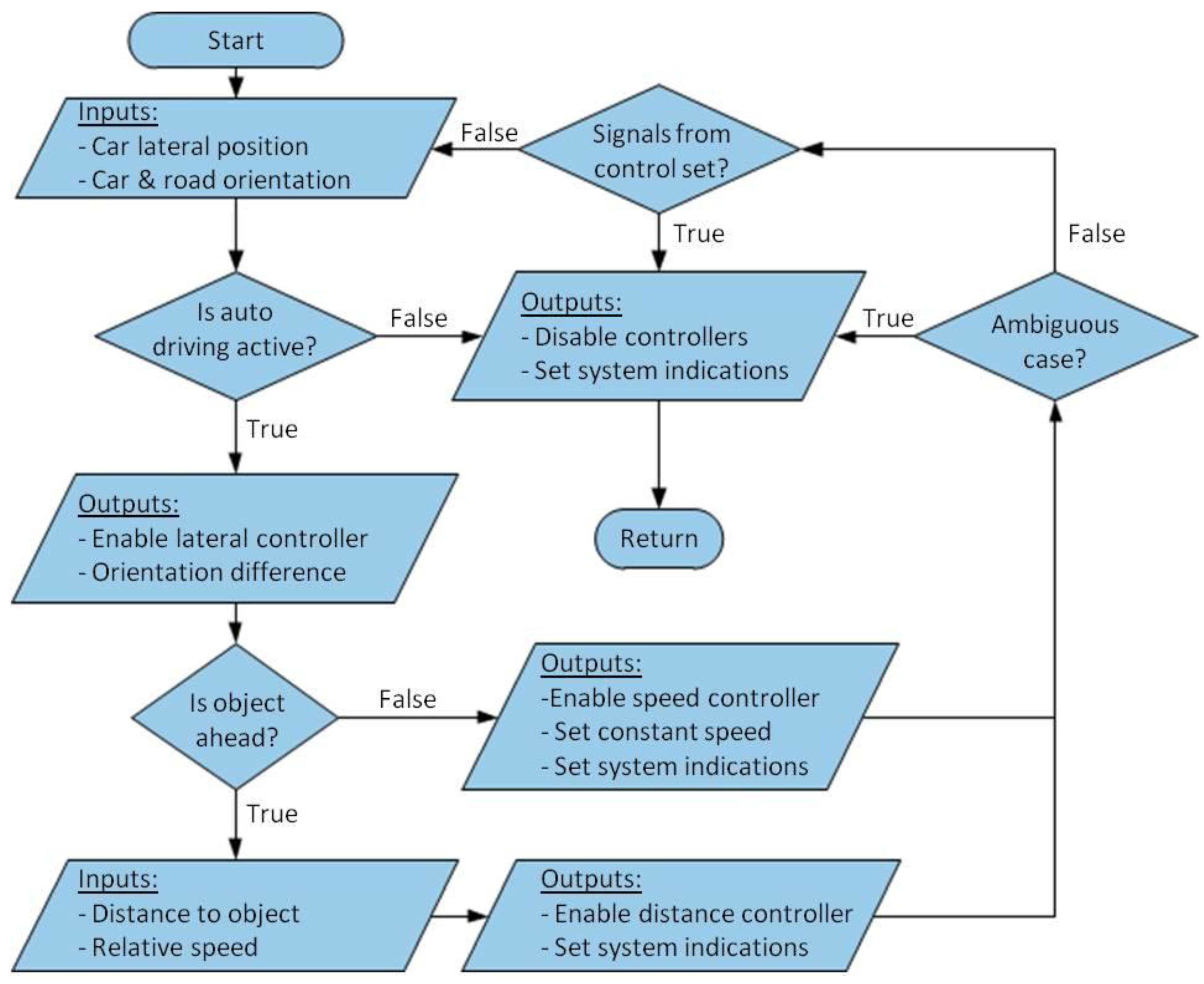
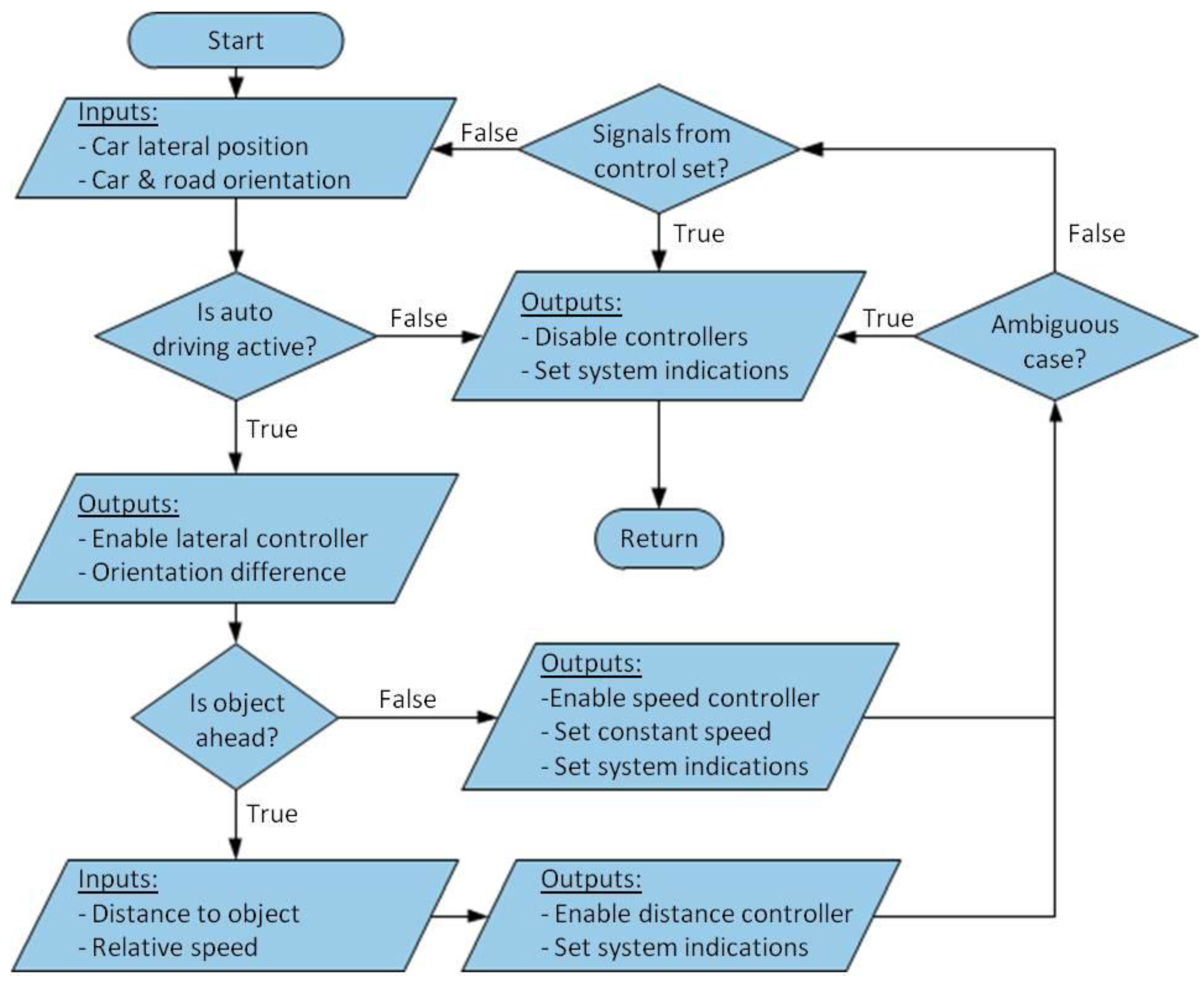
4.1.4. ADAS Simulation Model
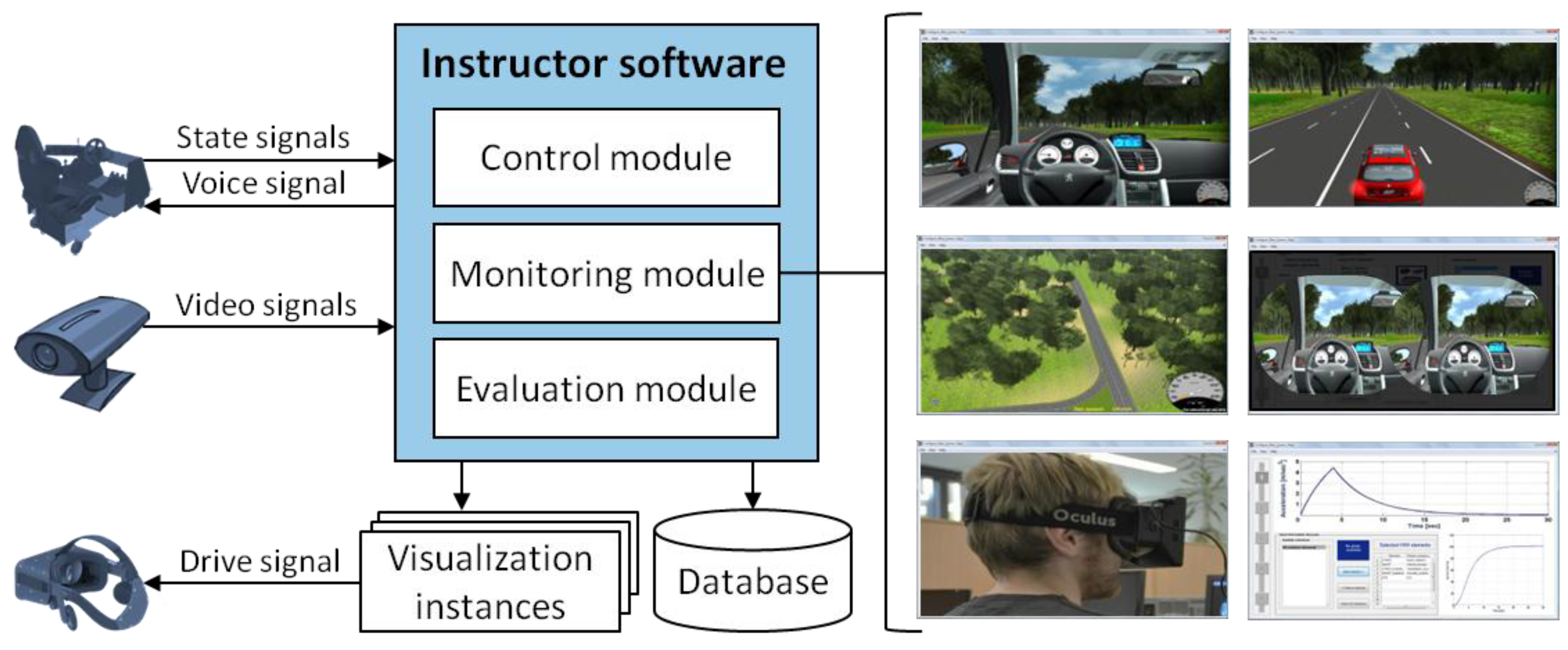
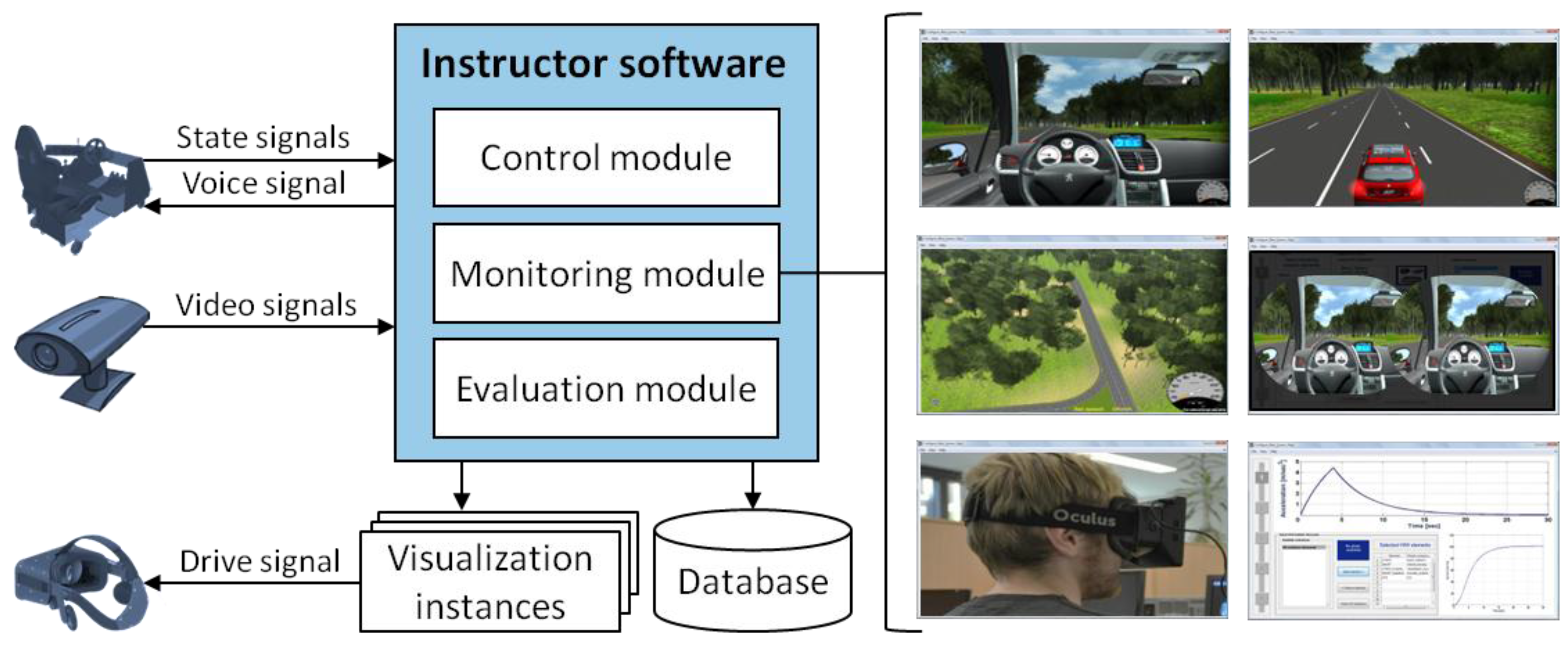
4.2. Instructor Software Tool
4.2.1. Control Module
4.2.2. Monitoring Module
4.2.3. Evaluation Module
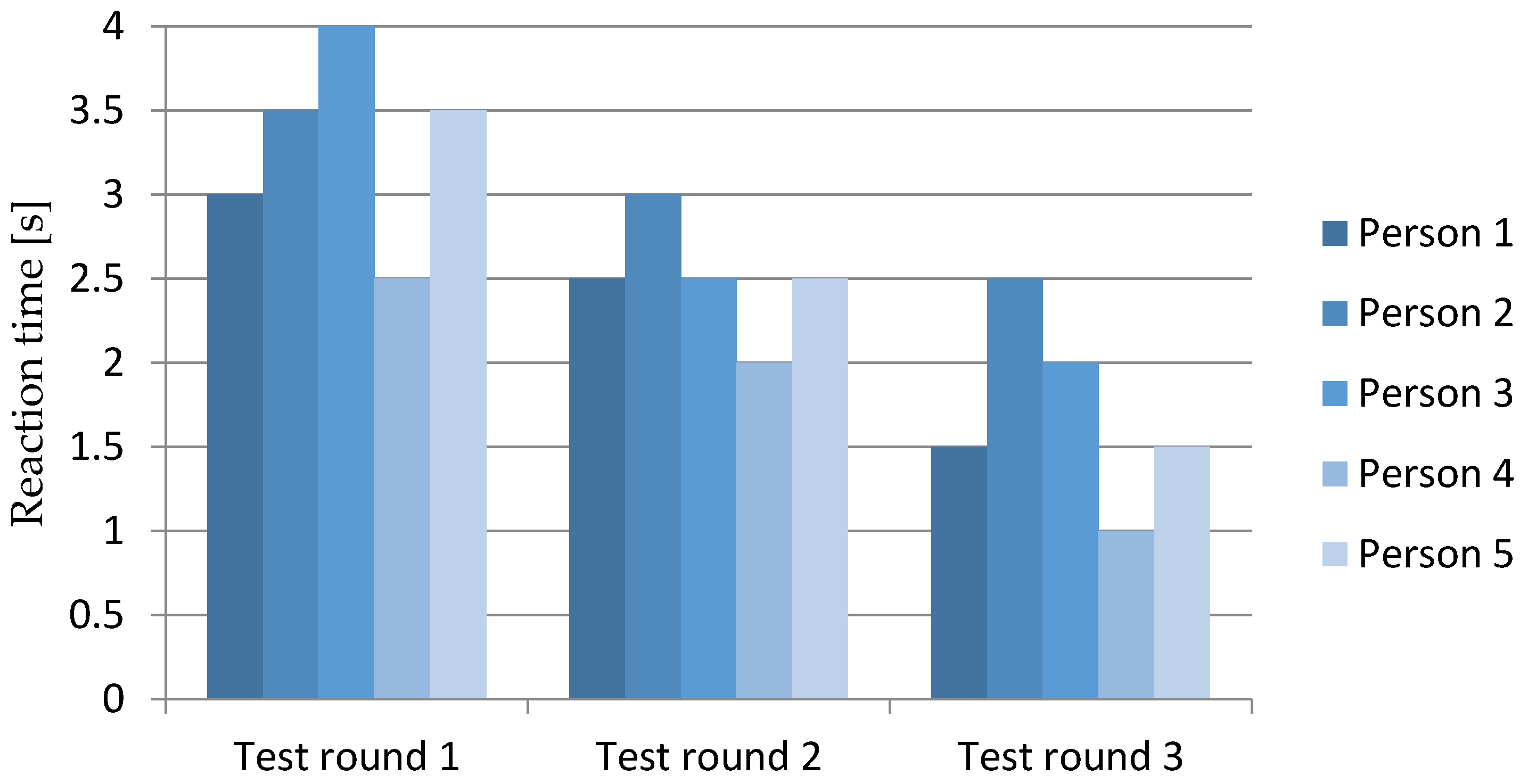
5. Results and Validation
6. Conclusions and Future Work
- Driving instructors can participate within the virtual environments of the drivers. Thereby, the typical and necessary supervisory role of driving instructors is not sacrificed through the utilization of the developed training platform in driving schools.
- More than one participant can be trained simultaneously, while instructors have full centralized control on the training sessions. This ensures better time and effort utilization of interactive driving simulation in driving schools.
- An interactive simulation model for an autonomous driving system was implemented in this work. This model presents an example of potential complex systems that drivers must practice initially in safe virtual environments.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Golias, J.; Yannis, G.; Antoniou, C. Classification of driver assistance systems according to their impact on road safety and traffic efficiency. J. Intell. Transp. Syst. 2002, 22, 179–196. [Google Scholar] [CrossRef]
- Abdelgawad, K.; Gausemeier, J.; Dumitrescu, R.; Grafe, M.; Stöcklein, J.; Berssenbrügge, J. Networked Driving Simulation: Applications, State of the Art, and Design Considerations. Designs 2017, 1, 4. [Google Scholar] [CrossRef]
- Abdelgawad, K.; Abdelkarim, M.; Hassan, B.; Grafe, M.; Gräßler, I. A Modular Architecture of a PC-based Driving Simulator for Advanced Driver Assistance Systems Development. In Proceedings of the 15th IEEE International Workshop on Research and Education in Mechatronics (REM2014), El Gouna, Egypt, 9–11 September 2014; ISBN 978-1-4799-3030-2. [Google Scholar]
- Abdelgawad, K.; Abdelkarim, M.; Hassan, H.; Grafe, M.; Gräßler, I. A Scalable Framework for Advanced Driver Assistance Systems Simulation. In Proceedings of the 6th International Conference on Advances in System Simulation (SIMUL2014), Nice, France, 12–16 October 2014. [Google Scholar]
- Panou, M.C.; Bekiaris, E.D.; Touliou, A.A. ADAS module in driving simulation for training young drivers. In Proceedings of the IEEE 13th International Symposium on Intelligent Transportation Systems (ITSC), Funchal, Portugal, 19–22 September 2010; pp. 1582–1587. [Google Scholar]
- Miller, D.; Sun, A.; Ju, W. Situation awareness with different levels of automation. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics (SMC), San Diego, CA, USA, 5–8 October 2014; pp. 688–693, INSPEC 14805632. [Google Scholar] [CrossRef]
- Greenberg, J.; Blommer, M. Physical Fidelity of Driving Simulators. In Handbook of Driving Simulation for Engineering, Medicine, and Psychology; Fisher, D., Caird, J., Rizzo, M., Lee, J., Eds.; CRC Press Taylor & Francis Group: Boca Raton, FL, USA, 2011; pp. 1–34. [Google Scholar]
- Kaufmann, H.; Csisinko, M. Multiple Head Mounted Displays in Virtual and Augmented Reality Applications. Int. J. Virtual Real. 2006, 5, 1–10. [Google Scholar]
- Gloria, A.; Bellotti, F.; Berta, R.; Lavagnino, E. Serious Games for Education and Training. Int. J. Serious Games 2014, 1, 100–105. [Google Scholar] [CrossRef]
- Jazar, R.N. Vehicle Dynamics. In Vehicle Dynamics: Theory and Application, 2nd ed.; Jazar, R.N., Ed.; Springer Science + Business Media, LCC: New York, NY, USA, 2008; pp. 567–620. [Google Scholar]
- Sivaji, V.V.; Sailaja, M. Adaptive Cruise Control Systems for Vehicle Modeling Using Stop and Go Manoeuvres. Int. J. Eng. Res. Appl. 2013, 3, 2453–2456. [Google Scholar]
- Yi, K.; Cho, Y.; Lee, S.; Lee, J.; Ryoo, N. A Throttle/Brake Control Law for Vehicle Intelligent Cruise Control. In Proceedings of the Seoul 2000 FISITA World Automotive Congress, Seoul, Korea, 12–15 June 2000. [Google Scholar]
- Abdelkarim, M.; Butz, T.; Moutchiho, A. A nonlinear path following controller for lateral vehicle guidance. In Fahrermodellierung in Wissenschaft und Wirtschaft, Fortschritt-Berichte VDI, Vol. 22, No. 35; VDI Verlag: Düsseldorf, Germany, 2013; pp. 135–145. ISBN 978-3-18-303522-9. [Google Scholar]
- Okuda, R.; Kajiwara, Y.; Terashima, K. A survey of technical trend of ADAS and autonomous driving. In Proceedings of the IEEE 13th International Symposium on VLSI Technology, Systems and Application (VLSI-TSA), Hsinchu, China, 21–25 April 2014; pp. 1–4. [Google Scholar]
- Engen, T.; Lervag, L.-E.; Moen, T. Evaluation of IVIS/ADAS Using Driving Simulators. Comparing Performance Measures in Different Environments. In Proceedings of the European Transport Conference, Noordwijkerhout, The Netherlands, 5–7 October 2009; pp. 1–10. [Google Scholar]
- Mao, Z.; Yan, X.; Zhang, H.; Wu, C. Driving Simulator Validation for Drivers’ Speed Behavior. In Proceedings of the 2nd International Conference on Transportation Engineering, Chengdu, China, 25–27 July 2009; pp. 2887–2892. [Google Scholar]
- Abdelgawad, K.; Gausemeier, J.; Trächtler, A.; Gausemeier, S.; Dumitrescu, R.; Berssenbrügge, J.; Stöcklein, J.; Grafe, M. An Application-Oriented Design Method for Networked Driving Simulation. Designs 2017, 1, 6. [Google Scholar] [CrossRef]






© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdelgawad, K.; Gausemeier, J.; Stöcklein, J.; Grafe, M.; Berssenbrügge, J.; Dumitrescu, R. A Platform with Multiple Head-Mounted Displays for Advanced Training in Modern Driving Schools. Designs 2017, 1, 8. https://doi.org/10.3390/designs1020008
Abdelgawad K, Gausemeier J, Stöcklein J, Grafe M, Berssenbrügge J, Dumitrescu R. A Platform with Multiple Head-Mounted Displays for Advanced Training in Modern Driving Schools. Designs. 2017; 1(2):8. https://doi.org/10.3390/designs1020008
Chicago/Turabian StyleAbdelgawad, Kareem, Jürgen Gausemeier, Jörg Stöcklein, Michael Grafe, Jan Berssenbrügge, and Roman Dumitrescu. 2017. "A Platform with Multiple Head-Mounted Displays for Advanced Training in Modern Driving Schools" Designs 1, no. 2: 8. https://doi.org/10.3390/designs1020008