
Parameters Optimization of a Hydraulic Buffer System for Belt Arrestor in Downward Belt Conveyors

Abstract
:1. Introduction
2. Literature Review
2.1. Belt Arrestors
2.2. Hydraulic Buffer Device
2.3. Discussion
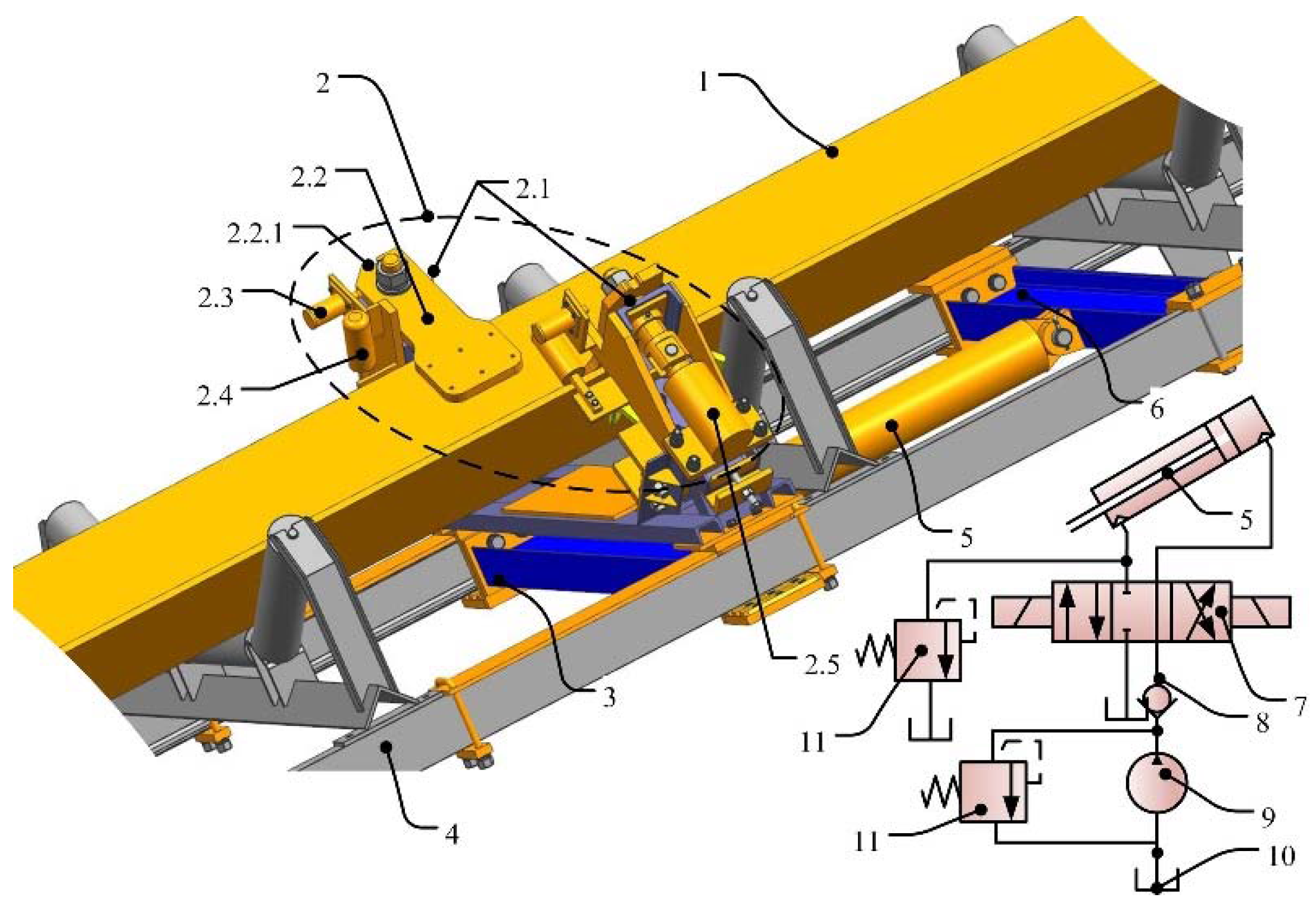
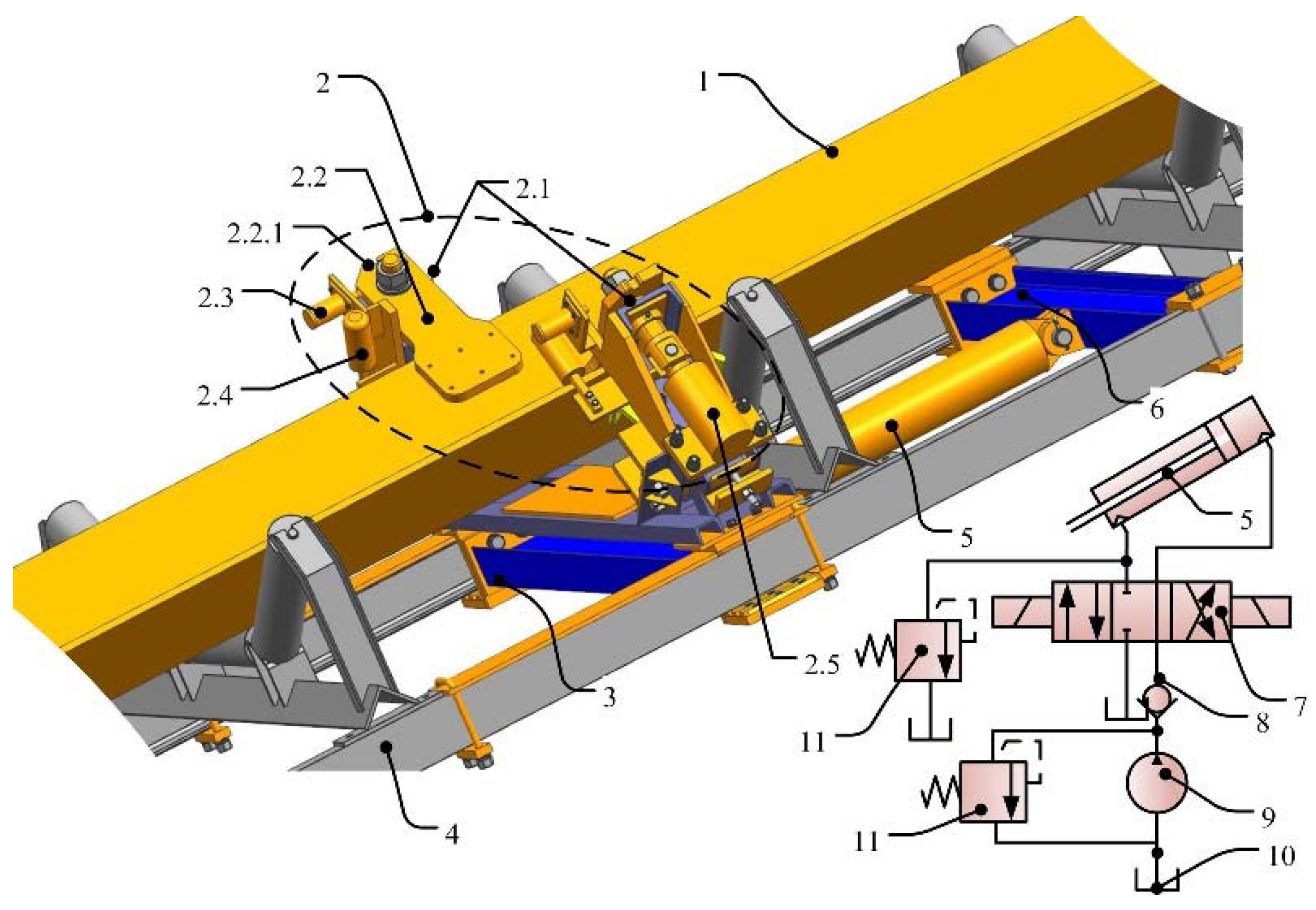
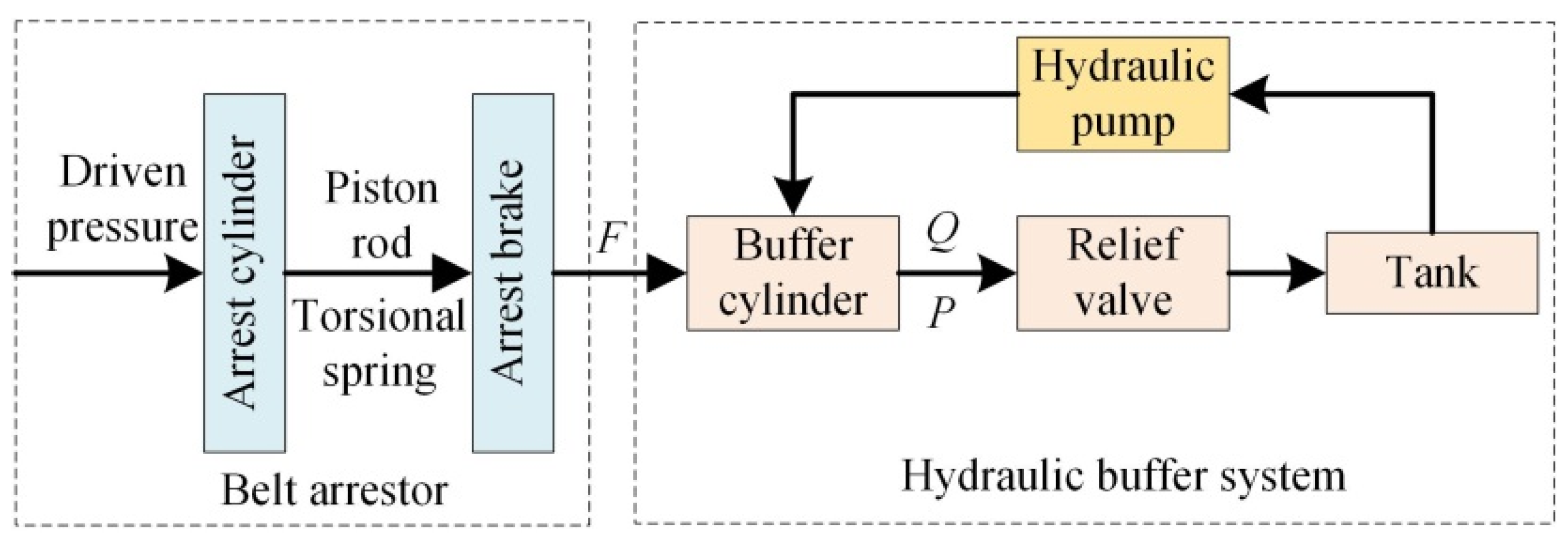
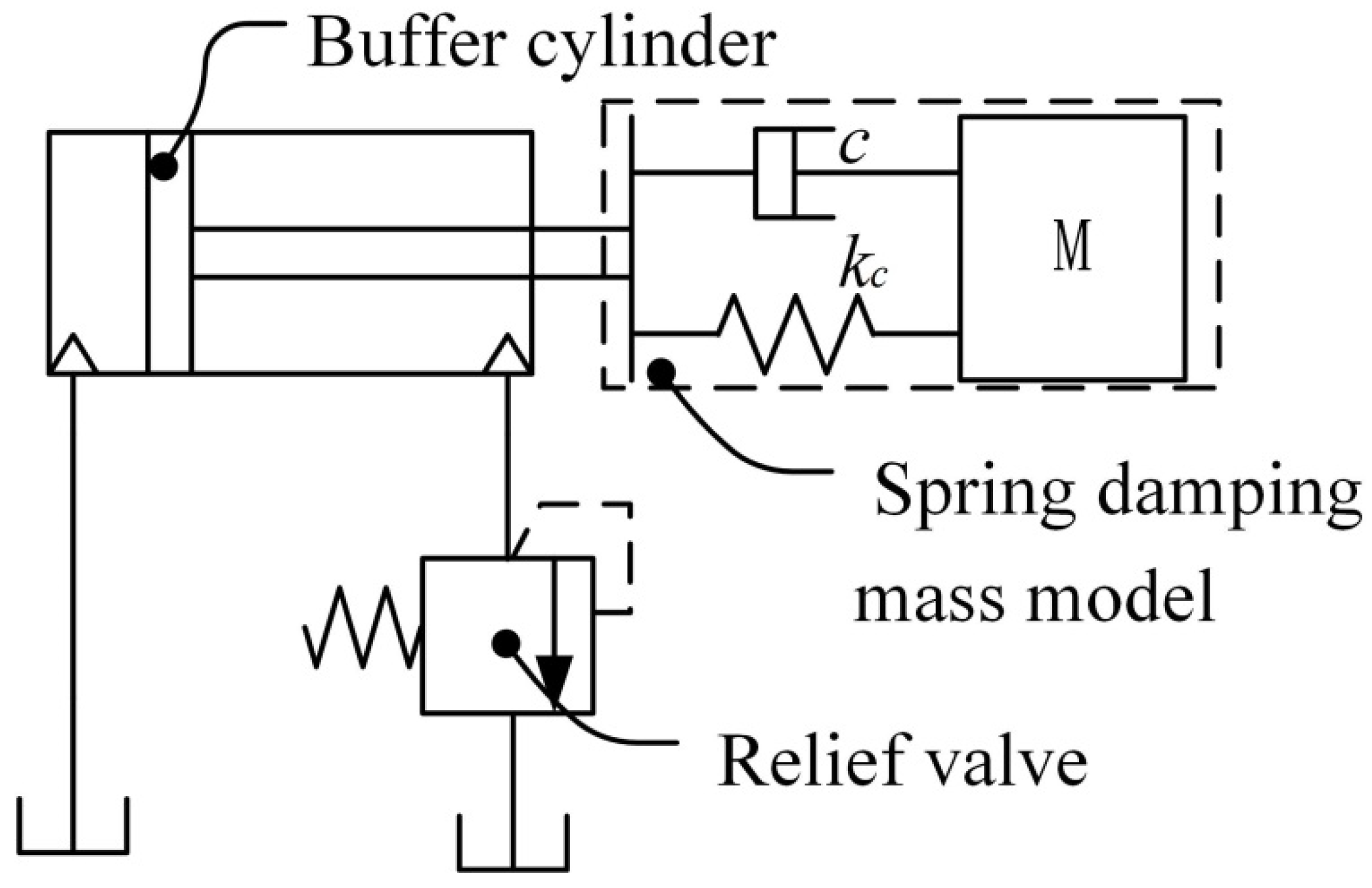
3. The Working Principle of the Hydraulic Buffer System
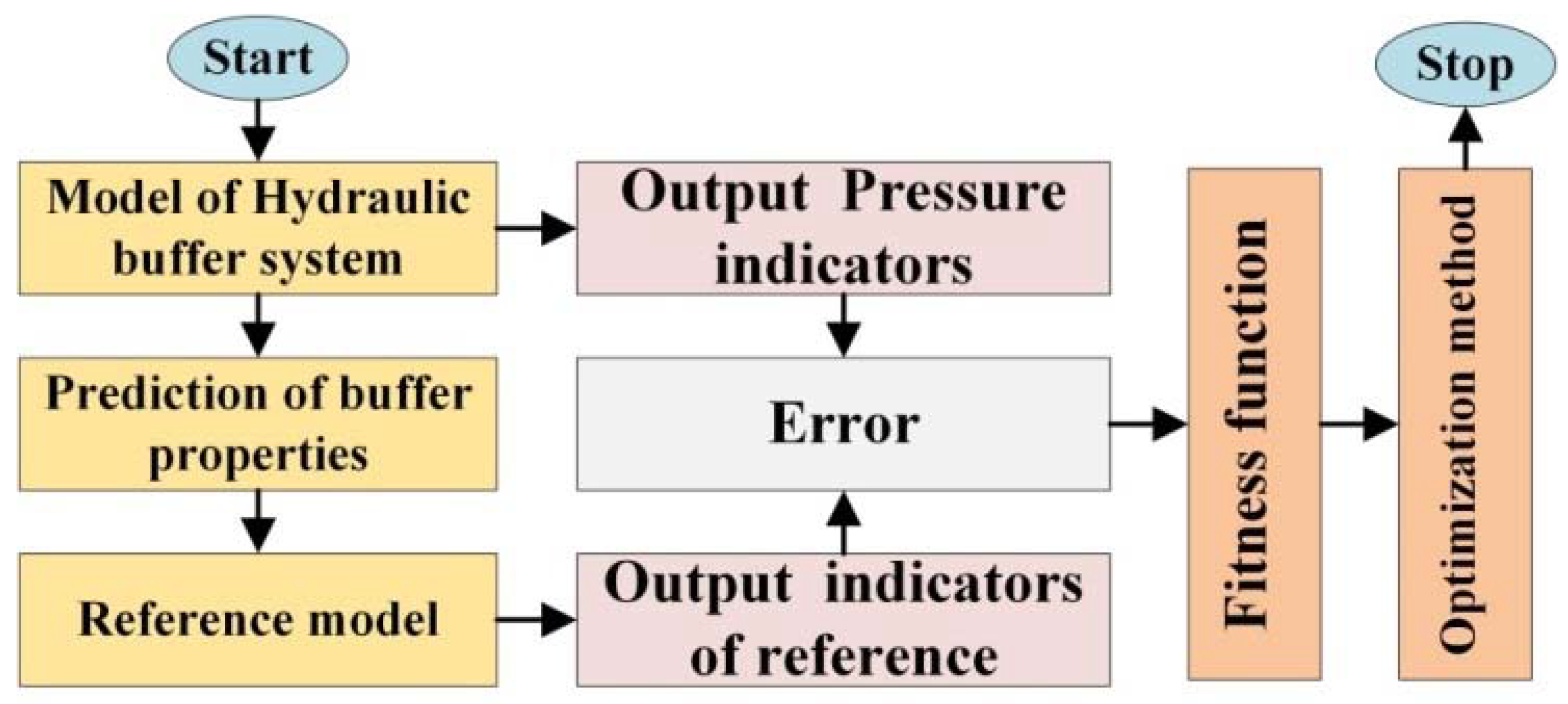
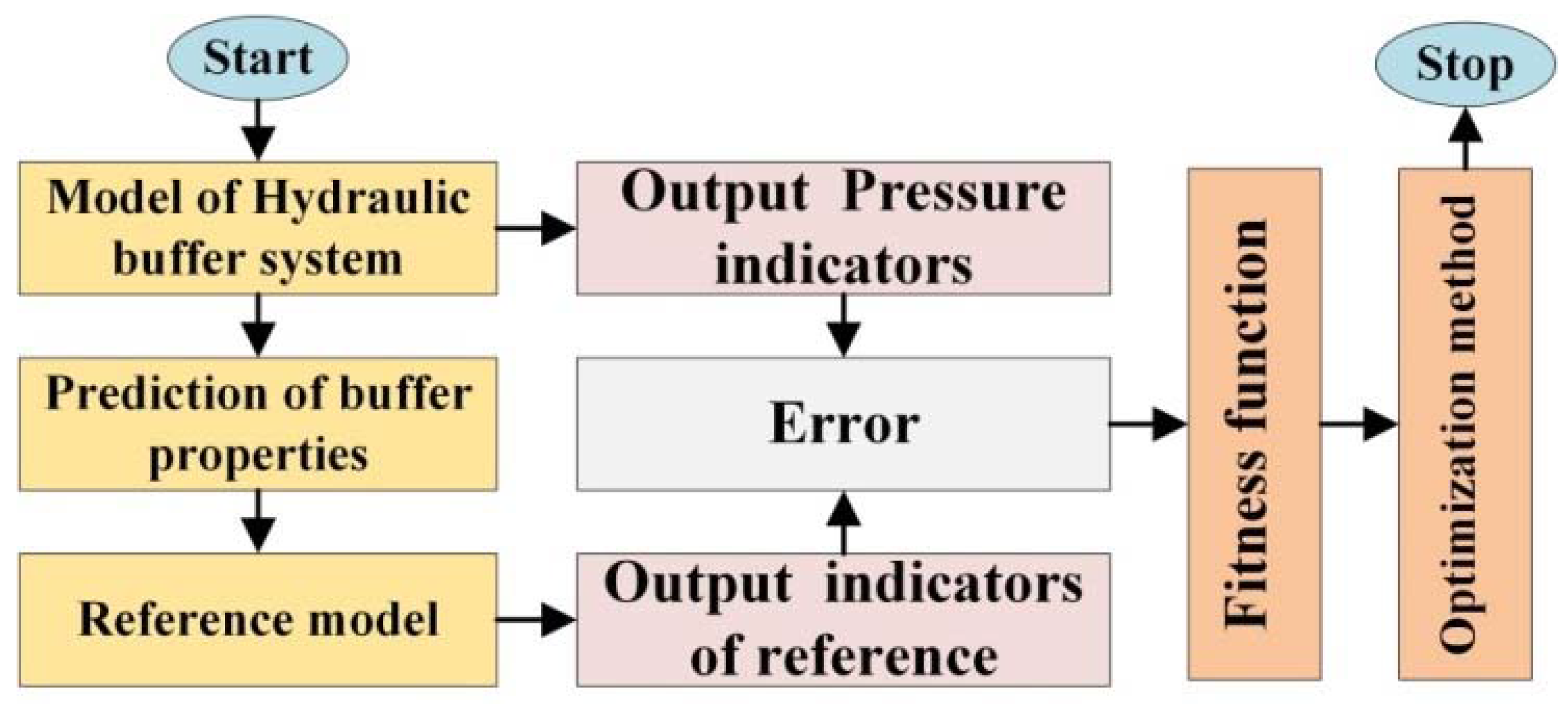
4. Parameters Optimization Method of the Hydraulic Buffer System
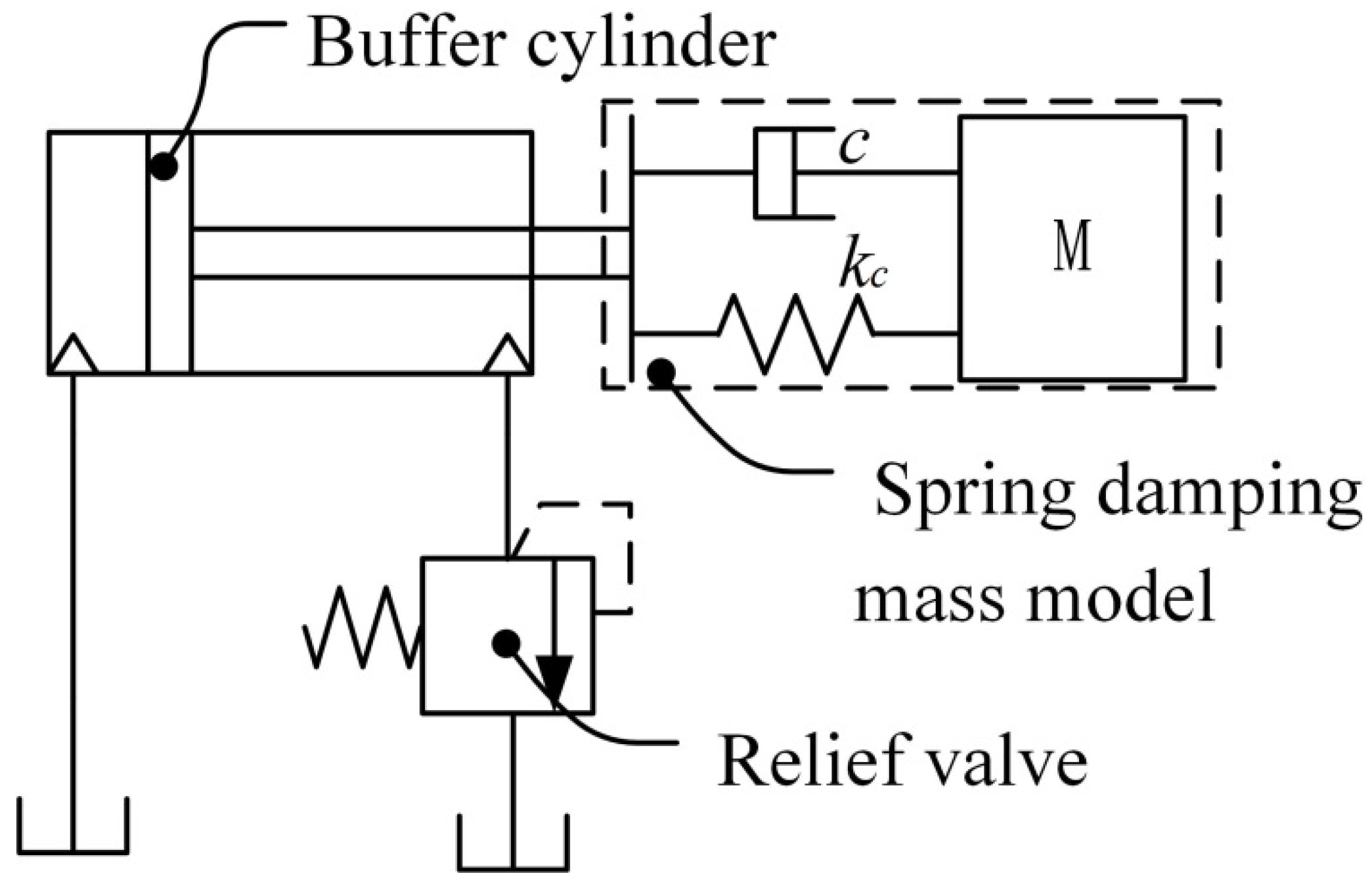
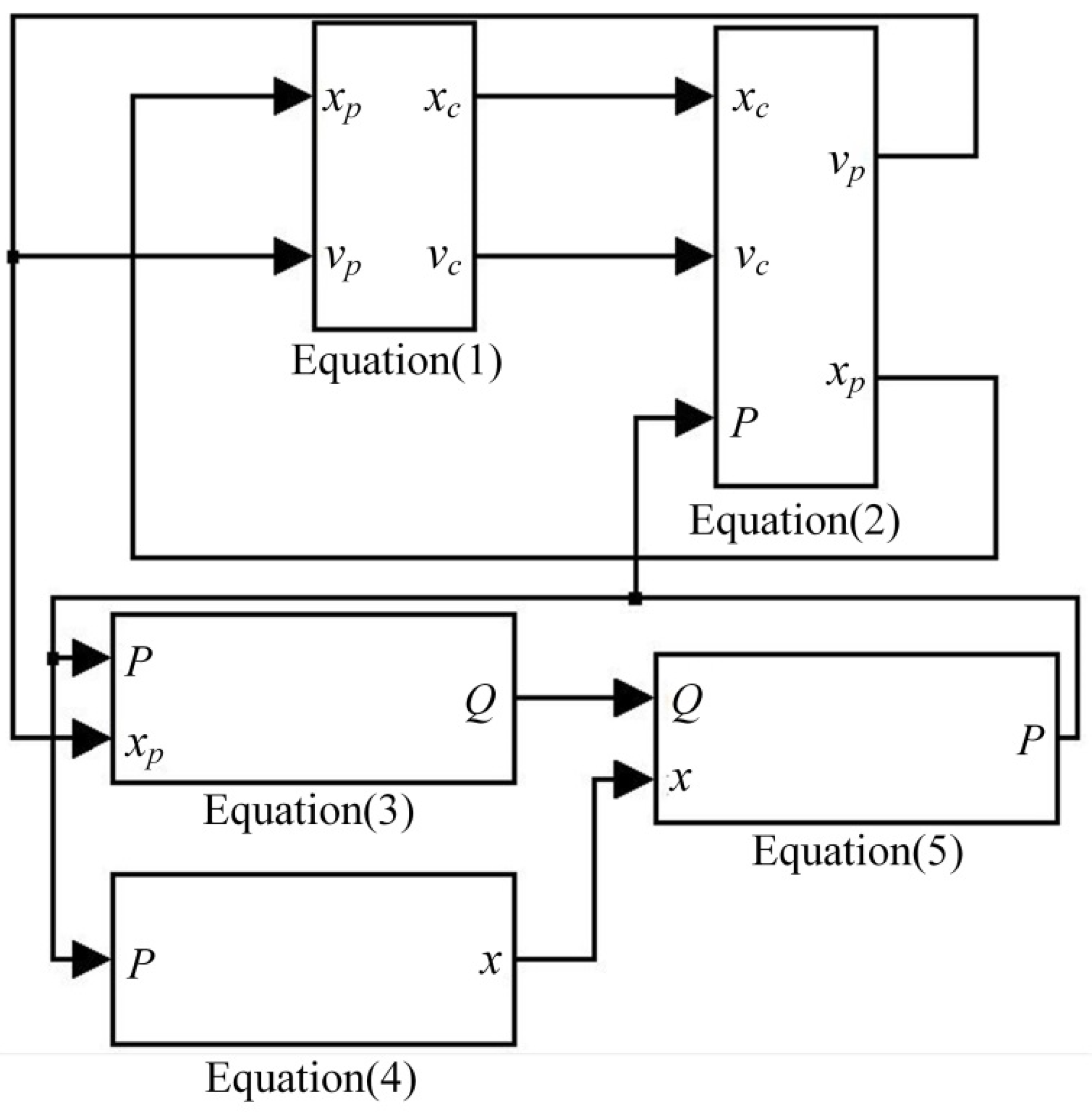
4.1. Model of the Hydraulic Buffer System
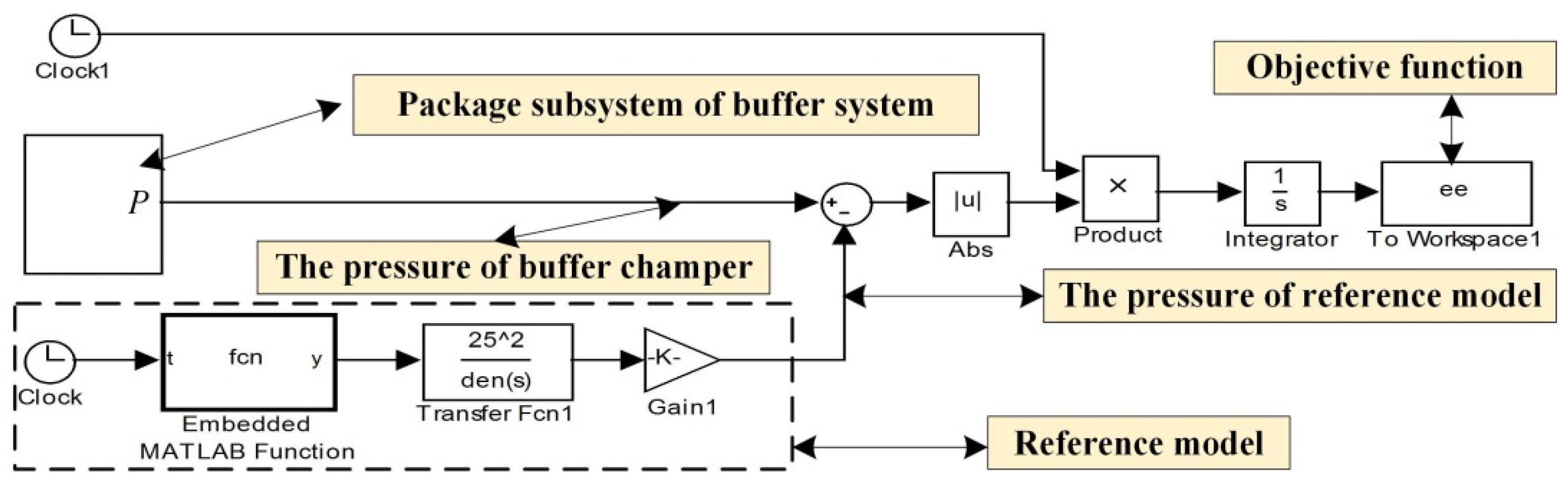
4.2. Reference Model of the Hydraulic Buffer System
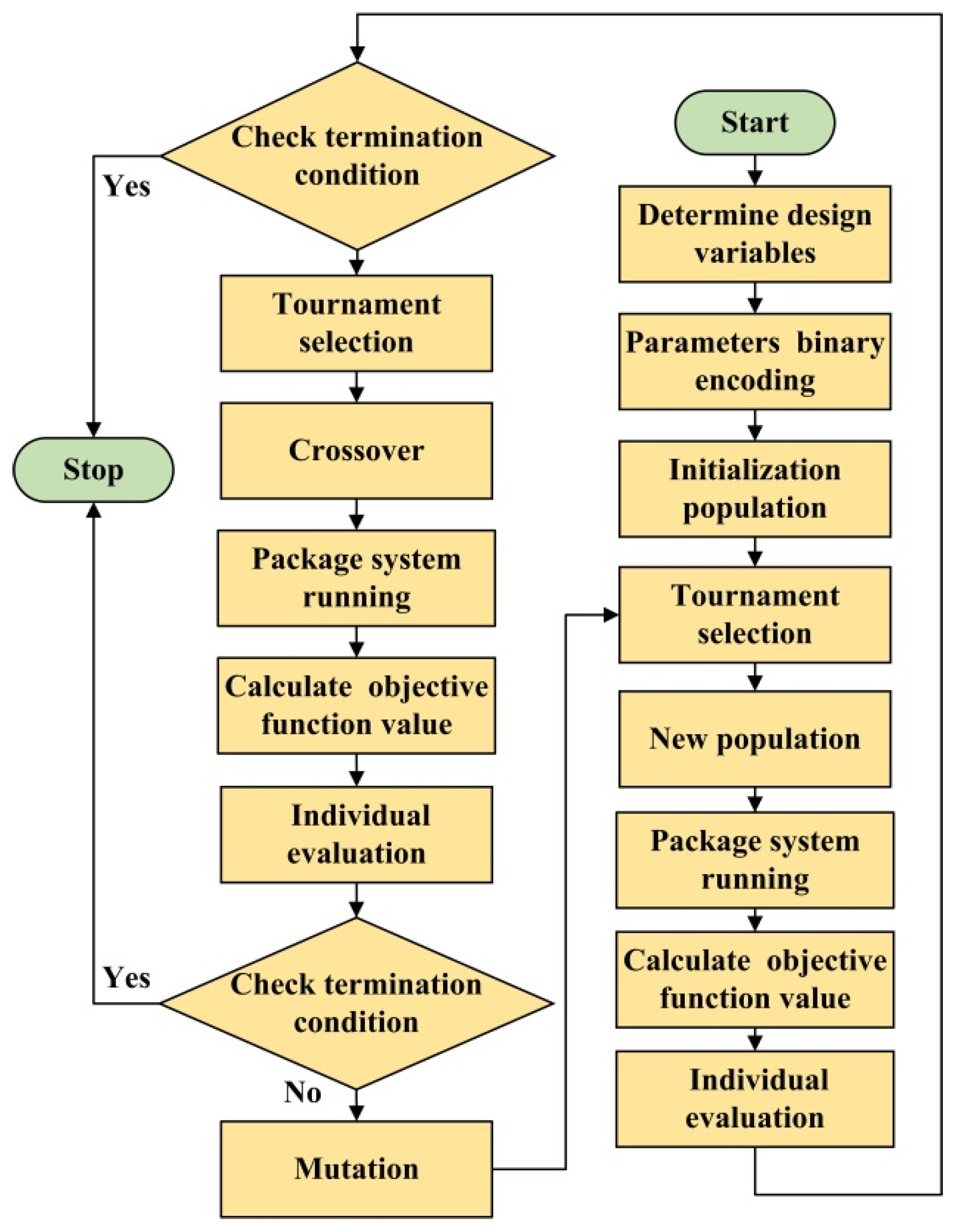
4.3. Optimization Algorithm
5. Simulation Example
5.1. Preparing Work
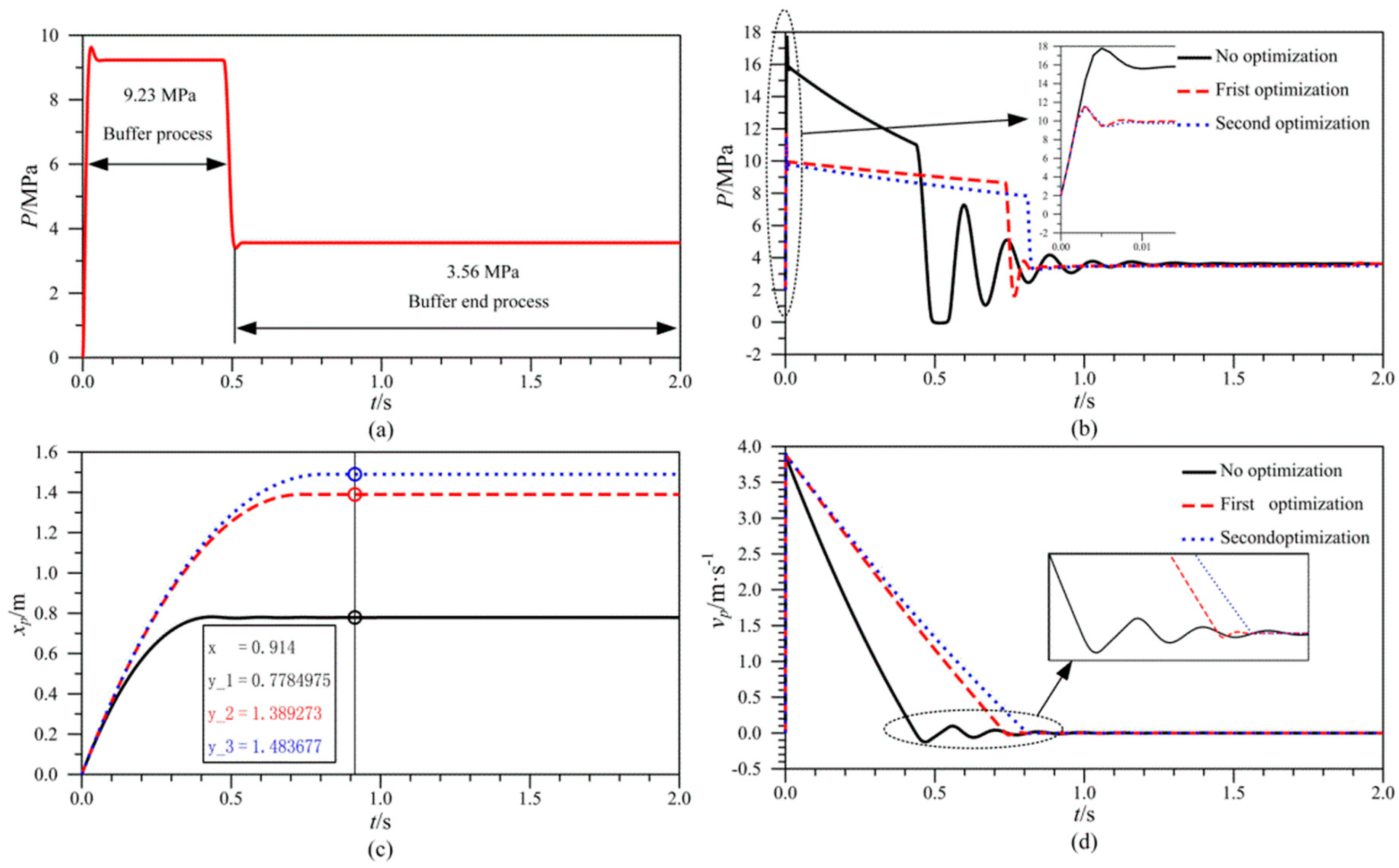
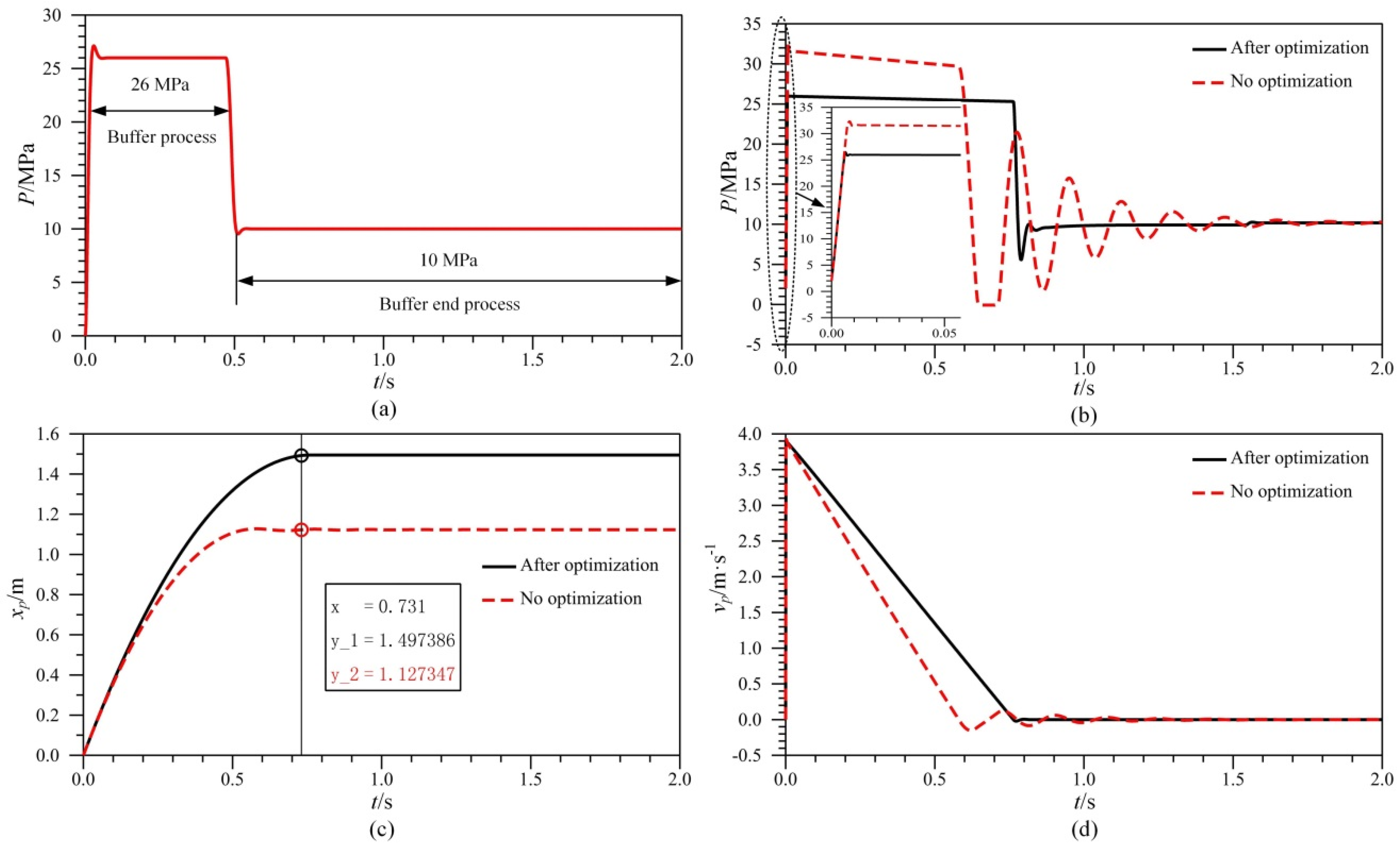
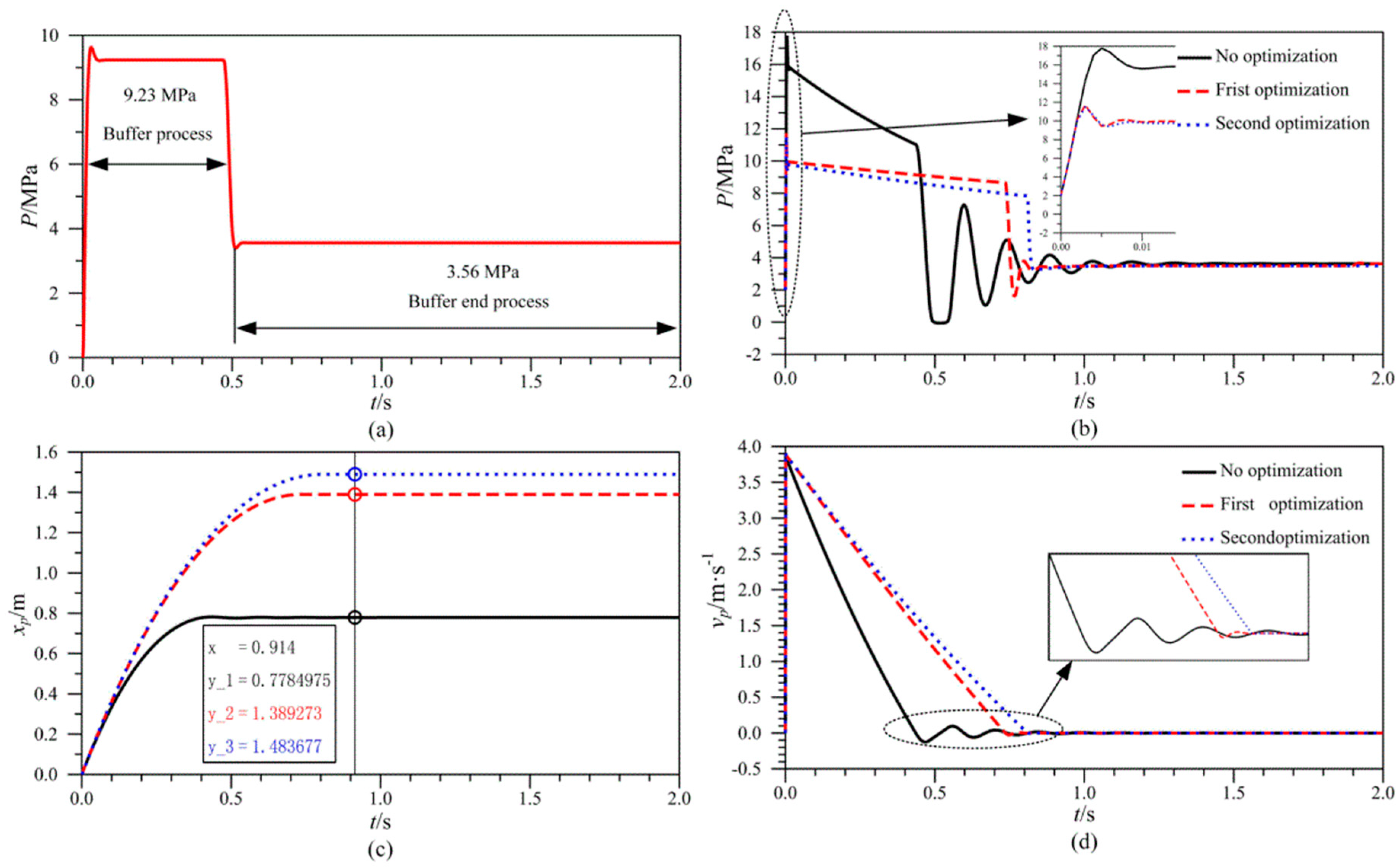
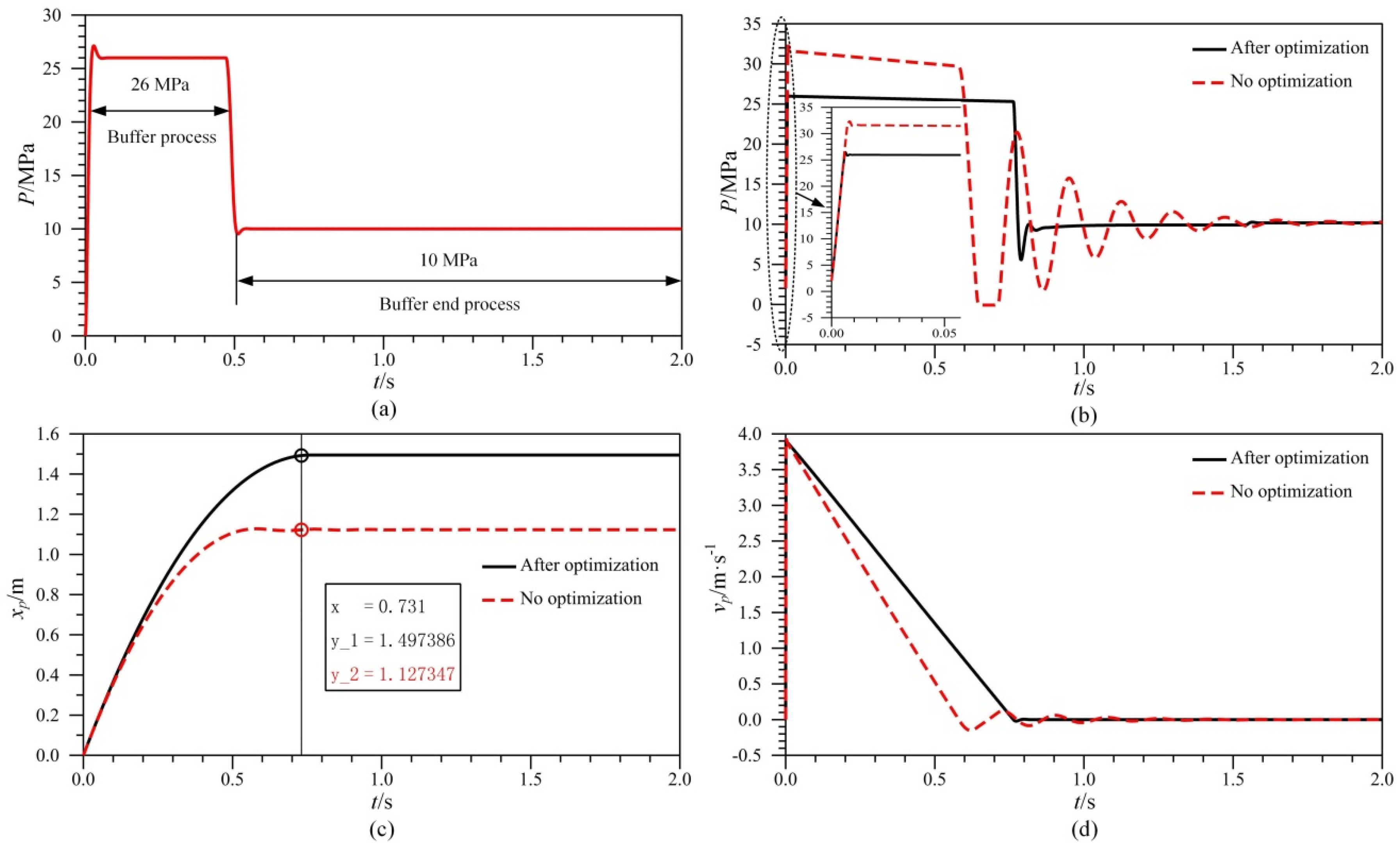
5.2. Simulation Results and Analysis
6. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lodewijks, G. Two decades dynamics of belt conveyor systems. Bulk Solids Hand. 2002, 22, 124–132. [Google Scholar]
- Li, J.X.; Kou, Z.M.; Jing, Y.U. The characteristic analysis and experimental research of hydraulic speeding soft brake for downward belt conveyor. J. China Coal Soc. 2013, 38, 1697–1702. [Google Scholar]
- Harrison, A. Power Oscillation Mechanisms in Booster Conveyors. In MECH’91Australia; Engineering for a Competitive World; International Mechanical Engineering Congress and Exhibition, Sydney, Australia, 8–12 July 1991; pp. 89–95.
- Zhu, L.P.; Jiang, W.L. Study on typical belt conveyor in coal mine of China. J. China Coal Soc. 2010, 35, 1916–1920. [Google Scholar]
- Barnard, H. Conveyor Belt Arrestor. US20060118393, 8 June 2006. [Google Scholar]
- Viviers, P. Conveyor Belt Arrestor System. WO/2016/055882A2, 14 April 2016. [Google Scholar]
- Li, Y.W.; Miao, Y.J.; Wang, X.Y.; Chen, Y.G. Development of SPDB-I type broken belt protector for uphill belt conveyor. Coal Mine Mach. 2006, 27, 477–479. [Google Scholar]
- Yin, W.J.; Du, C.T.; Gao, P.; Han, Z.D.; Tan, C.; Liu, X.H.; Yu, H. Double Belt Catching Device Suitable for Large Angle Belt Conveyor. CN205076429U, 9 March 2016. [Google Scholar]
- Ma, H.W.; Li, D.S.; Zhang, X.H.; Mao, Q.H. Dynamic simulation analysis of belt rupture for belt conveyor. Appl. Mech. Mater. 2013, 313, 1120–1124. [Google Scholar] [CrossRef]
- Zhang, X.H.; Ma, H.W.; Zhang, D.W.; Mao, Q.H.; Chen, W.H. Analysis and design an electro-hydraulic type belt capture device for belt conveyor. Appl. Mech. Mater. 2012, 121, 1901–1905. [Google Scholar] [CrossRef]
- Zhang, X.H. Development of new type of electro-hydraulic belt capture device for belt conveyor. Mach. Tool Hydra 2012, 40, 1–3. [Google Scholar] [CrossRef]
- Du, J.W.; Li, J.X.; Kou, Z.M. Simulation and test study of wedgy broken-belt catching device. Min. Process. Equip. 2014, 42, 65–68. [Google Scholar]
- Pang, X.X.; Kou, Z.M.; Li, J.X. Numerical analysis and test study on hydraulic injection circuit for broken-belt catcher. Min. Process. Equip. 2015, 43, 65–70. [Google Scholar]
- Li, J.X.; Kou, Z.M.; Du, J.W. Co-simulation and experimental research of wedge broken-belt catching device. Open Mech. Eng. J. 2014, 8, 358–263. [Google Scholar]
- Zhang, X.; Qi, Y.; Jia, Q. The both-side-revolve broken belt catching machine. Int. J. Coal Sci. Technol. 2009, 34, 845–848. [Google Scholar]
- Liu, X.R.; Ma, L.; Ma, X.H. New hydraulic system of broken belt capture equipment. Chin. Hydraul. Pneum. 2016, 67–71. [Google Scholar] [CrossRef]
- Tian, S.T.; Bao, J.H.; Jiang, X.; Du, Y.X.; Zhu, K.H.; Li, Y.H.; Cheng, X.N. Broken Belt Protection Device with Deceleration Function. CN103818699, 18 November 2015. [Google Scholar]
- Zhou, M.S.; Sun, B.W.; Yuan, Z.G.; Li, G.; Yan, Z.Y. The Comprehensive Performance of Safety Testing System for Buffer Broken Belt Catching Device with Buffer Device. CN103708208, 9 September 2015. [Google Scholar]
- Wang, W.L.; Yu, D.S.; Zhou, Z. In-service parametric modelling a rail vehicle’s axle-box hydraulic damper for high-speed transit problems. Mech. Syst. Signal Process. 2015, 62, 517–533. [Google Scholar] [CrossRef]
- Ramos, J.C.; Rivas, A.; Biera, J.; Sacramento, G.; Sala, J.A. Development of a thermal model for automotive twin-tube shock absorbers. Appl. Therm. Eng. 2005, 25, 1836–1853. [Google Scholar] [CrossRef]
- Alonso, M.; Comas, Á. Modelling a twin tube cavitating shock absorber. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2006, 220, 1031–1040. [Google Scholar] [CrossRef]
- Alonso, M.; Comas, Á. Thermal model of a twin-tube cavitating shock absorber. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2008, 222, 1955–1964. [Google Scholar] [CrossRef]
- Qian, X.; Qing, H.L.; Chan, C. The influence of lateral shock absorber valve parameters on vehicle dynamic performance. J. Mech. Sci. Technol. 2015, 29, 1907–1911. [Google Scholar]
- Zhou, J.Y. Resaearch on the Working Condition of Hydraulic Press Return Based on Electro-Hydraulic Proportional Contrl. Master’s Thesis, Degree-Changan University, Changan, China, 2012. [Google Scholar]
- Yang, Q.S. Study on Buffering Principle and Dynamic Characteristics of Heavy load Forging Manipulator. Master’s Thesis, Degree-Chongqing University, Chongqing, China, 2013. [Google Scholar]
- Yang, Y.W.; Wang, Z.B.; Si, L.; Tan, C.; Han, Z.D.; Zheng, R.Y.; Liu, X.H.; Zhao, L.L.; Liang, B.; Wang, Q.G. Method for Absorbing Energy and Energy Absorbing Device of down Belt Conveyor. CN104097920, 15 October 2014. [Google Scholar]
- Chen, W.; Li, X. Model reduction for large rigid-flexible coupling belt conveyor system based on balanced realization. J. China Coal Soc. 2014, 39, 569–575. [Google Scholar]
- Licsko, G.; Champneys, A.; Hos, C. Nonlinear analysis of a single stage pressure relief valve. Int. J. Appl. Math. 2009, 39, 12–26. [Google Scholar]
- Eyres, R.D.; Champneys, A.R.; Lieven, N.A.J. Modelling and dynamic response of a damper with relief valve. Nonlinear Dyn. 2005, 40, 119–147. [Google Scholar] [CrossRef]
- Sugai, H.; Nonami, K. Reference model following sliding mode control for hydraulic mine detection hexapod robot. Trans. Jpn. Soc. Mech. Eng. C 2006, 72, 2829–2837. [Google Scholar] [CrossRef]
- Aly, A.A. Model reference PID control of an electro-hydraulic drive. Int. J. Intell. Syst. Appl. 2012, 4, 24–32. [Google Scholar] [CrossRef]
- Tao, M.; Zhao, Y.; Wang, G.W. Parameter optimization of sound absorption layer based on genetic algrithm. J. Vib. Shock 2014, 33, 20–25. [Google Scholar]
- Beijing Materials Handling Research Institute; Wuhan Feng Fan Technology Development Co., Ltd. DTII (A) Type Belt Conveyor Design Manual, 2nd ed.; Metallurgical Industry Press: China, 2013; pp. 65–112. [Google Scholar]
- Zhou, B.; Geng, Y.; Hung, X.T. Global sensitivity analysis of hydraulic system parameters to a hydraulically interconnected suspension’s dynamic response. J. Vib. Shock 2015, 34, 72–76. [Google Scholar]
- Wang, W.P.; Zhang, H.L.; Zhang, G.L. Analysis of port leakage on direct operted relief valve under foundation vibration. J. Zhejiang Univ. (Eng. Sci.) 2015, 49, 1160–1165. [Google Scholar]
- Wei, G.; Yang, Z.G.; Li, Q.L. Areodynamic optimization method for car body based on process costing genetic algrithm. J. Jilin Univ. (Eng. Technol. Ed.) 2014, 44, 1578–1582. [Google Scholar]
- Liang, C.Y.; Lü, P.; Ji, J.W.; Wang, X. Optimization of PID parameters for electro-hydraulic variable rate fertilization system based on genetic algorithm. Trans. Chin. Soc. Agric. Mach. 2013, 44, 89–93. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Units |
|---|---|
| Spacing of bearing roller | 1.5 m |
| Belt speed (v0) | 4 m/s |
| Delivery capacity | 2500 t/h |
| Unit mass of belt | 35 kg |
| Unit mass of load | 173.61 kg |
| Equivalent stiffness | 107 N/m/s |
| Equivalent damping coefficient | 106 N/m/s |
| Lean angle of the belt conveyor | 20° |
| Components | Parameters | Symbols | Units |
|---|---|---|---|
| Buffer cylinder | Initial pressure | P0 | 2 MPa |
| Damping coefficient | Bp | 50 N/m/s | |
| Relief valve | Diameter of spool | D | 0.03 m |
| Damping coefficient | B | 10 N/m/s | |
| Spring stiffness | K | 600 N/mm | |
| Spring pre compression | x0 | 0.035 m | |
| Hydraulic oil | Density | ρ | 870 kg/m3 |
| Elastic modulus | E | 1.4 × 109 MPa |
| Optimization Results | Symbols | Frist Optimization | Second Optimization | ||
|---|---|---|---|---|---|
| Units | Integers | Units | Integers | ||
| Spool diameter of relief valve | D | 43.68 | 44 | 40.27 | 40 |
| Spring stiffness | K | 204.29 | 204 | 410.15 | 410 |
| Spring pre-compression | x0 | 63.46 | 63 | 24.31 | 24 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, W.; Yang, Y.; Wang, Z.; Xu, J. Parameters Optimization of a Hydraulic Buffer System for Belt Arrestor in Downward Belt Conveyors. Math. Comput. Appl. 2016, 21, 42. https://doi.org/10.3390/mca21040042
Yin W, Yang Y, Wang Z, Xu J. Parameters Optimization of a Hydraulic Buffer System for Belt Arrestor in Downward Belt Conveyors. Mathematical and Computational Applications. 2016; 21(4):42. https://doi.org/10.3390/mca21040042
Chicago/Turabian StyleYin, Wenjun, Yinwei Yang, Zhanyu Wang, and Jing Xu. 2016. "Parameters Optimization of a Hydraulic Buffer System for Belt Arrestor in Downward Belt Conveyors" Mathematical and Computational Applications 21, no. 4: 42. https://doi.org/10.3390/mca21040042