1. Introduction
Ordinary differential equations (ODEs) are commonly used for mathematical modeling in many diverse fields such as engineering, operation research, industrial mathematics, behavioral sciences, artificial intelligence, management and sociology. This mathematical modeling is the art of translating problems from an application area into tractable mathematical formulations whose theoretical and numerical analysis provide insight, answers and guidance useful for the originating application [
1]. This type of problem can be formulated either in terms of first-order or higher-order ODEs.
In this article, the system of second-order ODEs of the following form is considered.
The method of solving higher-order ODEs by reducing them to a system of first-order approach involves more functions to evaluate them and then leads to a computational burden as mentioned in [
2,
3,
4]. The multistep methods for solving higher-order ODEs directly have been developed by many scholars such as [
5,
6,
7,
8,
9]. However, these researchers only applied their methods to solve single initial value problems of ODEs.
The aim of this paper is to develop a new numerical method for solving single second-order ODEs and systems of second-order ODEs directly.
2. Derivation of the Method
In this section, a one-step hybrid block method with three off-step points,
and
, for solving Equation (1) is derived. Let the power series of the form
be the approximate solution to Equation (1) for
where
are the real coefficients to be determined,
is the number of collocation points,
is the number of interpolation points and
is a constant step size of the partition of interval
which is given by
.
Differentiating Equation (2) twice gives:
Interpolating Equation (2) at
,
and collocating Equation (3) at all points in the selected interval,
i.e.,
,
,
,
and
, gives the following equations which can be written in matrix form:
Employing the Gaussian elimination method on Equation (4) gives the coefficient
ai '
s, for
. These values are then substituted into Equation (2) to give the implicit continuous hybrid method of the form:
Differentiating Equation (5) once yields:
where
Equation (5) is evaluated at non-interpolating points,
i.e.,
xn,
and
xn+1, while its first derivative is evaluated at all points, and this yields the following equation in matrix form:
where
Multiplying Equation (7) by
gives the hybrid block method as shown below.
3. Properties of the Method
3.1. Zero Stability
The one-step hybrid block method (8) is said to be zero-stable if and only if the first characteristic function Π(
x) has roots such that
and if
; then the multiplicity of
does not exceed two. The characteristic function of the new derived method is given as below:
the solution of which is
. Hence, our method is zero-stable.
3.2. Order of the Method
According to [
9] the order of the new method in Equation (8) is obtained by using the Taylor series and it is found that the developed method has an order of
with an error constant vector of:
| [1.732063 × 10−7, 4.104127 × 10−7, 6.582857 × 10−7, −1.587302 × 10−6, 1.537778 × 10−6, 8.533333 × 10−7, |
| 1.680000 × 10−6, −1.666667 × 10−5]T |
3.3. Consistency
The hybrid block method is said to be consistent if it has an order more than or equal to one. Therefore, our method is consistent.
3.4. Convergence
Zero stability and consistency are sufficient conditions for a linear multistep method to be convergent [
10]. Since the new hybrid block method is zero-stable and consistent, it can be concluded that the method is convergent.
3.5. Region of Absolute Stability
In this section, the locus boundary method is adopted to determine the region of absolute stability. The linear multistep numerical method is said to be absolutely stable if for all given
h, the roots of the characteristic function
satisfies
. The test equation
is substituted in Equation (8) where
and
. Substituting
and equating the imaginary part yields:
This gives the stability interval of (0, 1222826).
4. Implementation of the Method
The initial starting value at each block is obtained by using the Taylor method. Then, the calculations are corrected using Equation (8). For the next block, the same techniques are repeated to compute the approximation values of , j = 1,…, m simultaneously until the end of the integrated interval. During the calculations of the iteration, the final values of are taken as the initial values for the next iteration.
5. Numerical Experiments
In this section, the performance of the developed one-step hybrid block method is examined using the following three systems of second-order initial value problems.
Table 1 and
Table 2,
Table 3 and
Table 4, and
Table 5 and
Table 6 show the comparison of the numerical results of the new method with exact solution for solving problems 1–3 respectively. While, in
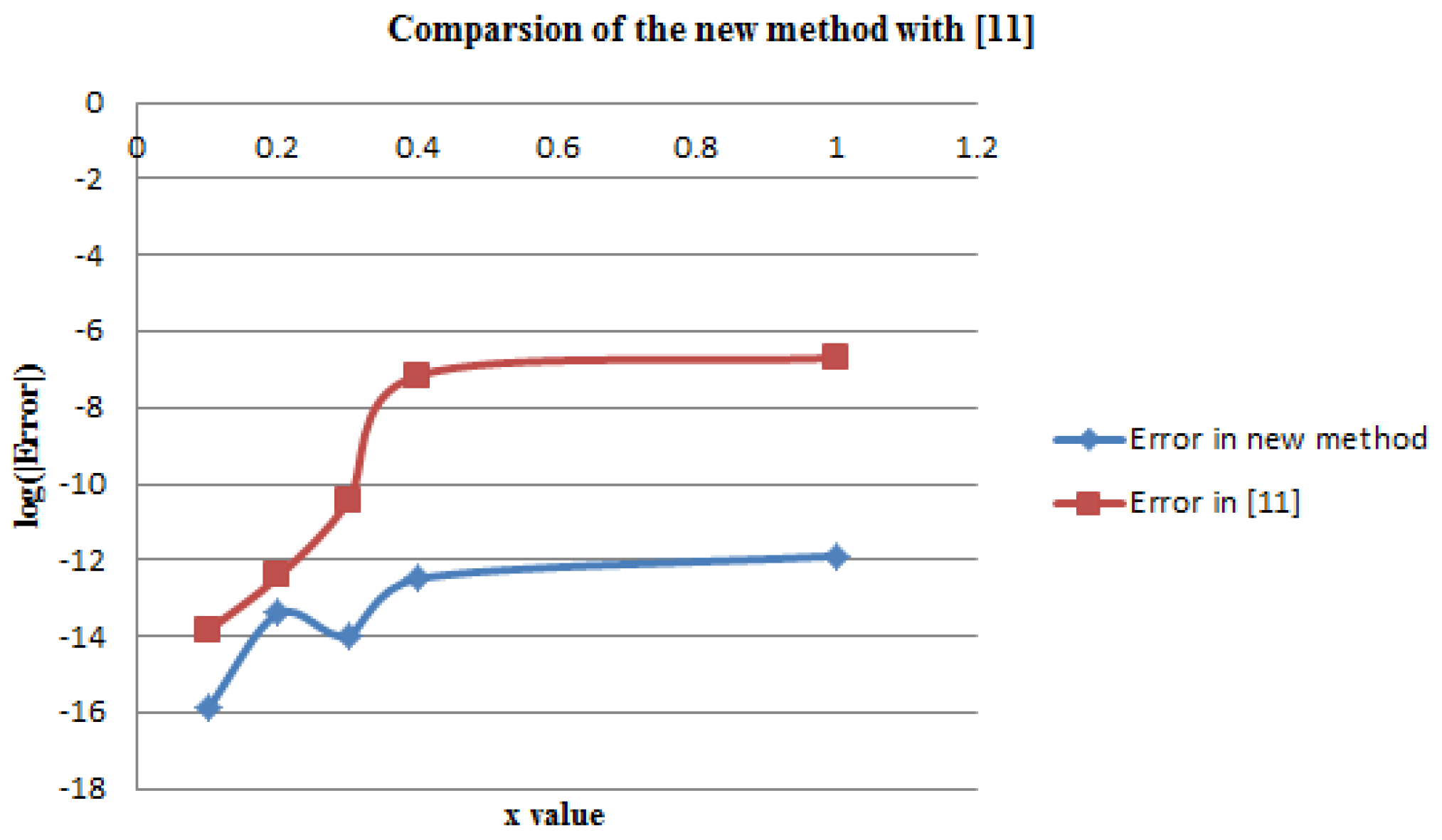
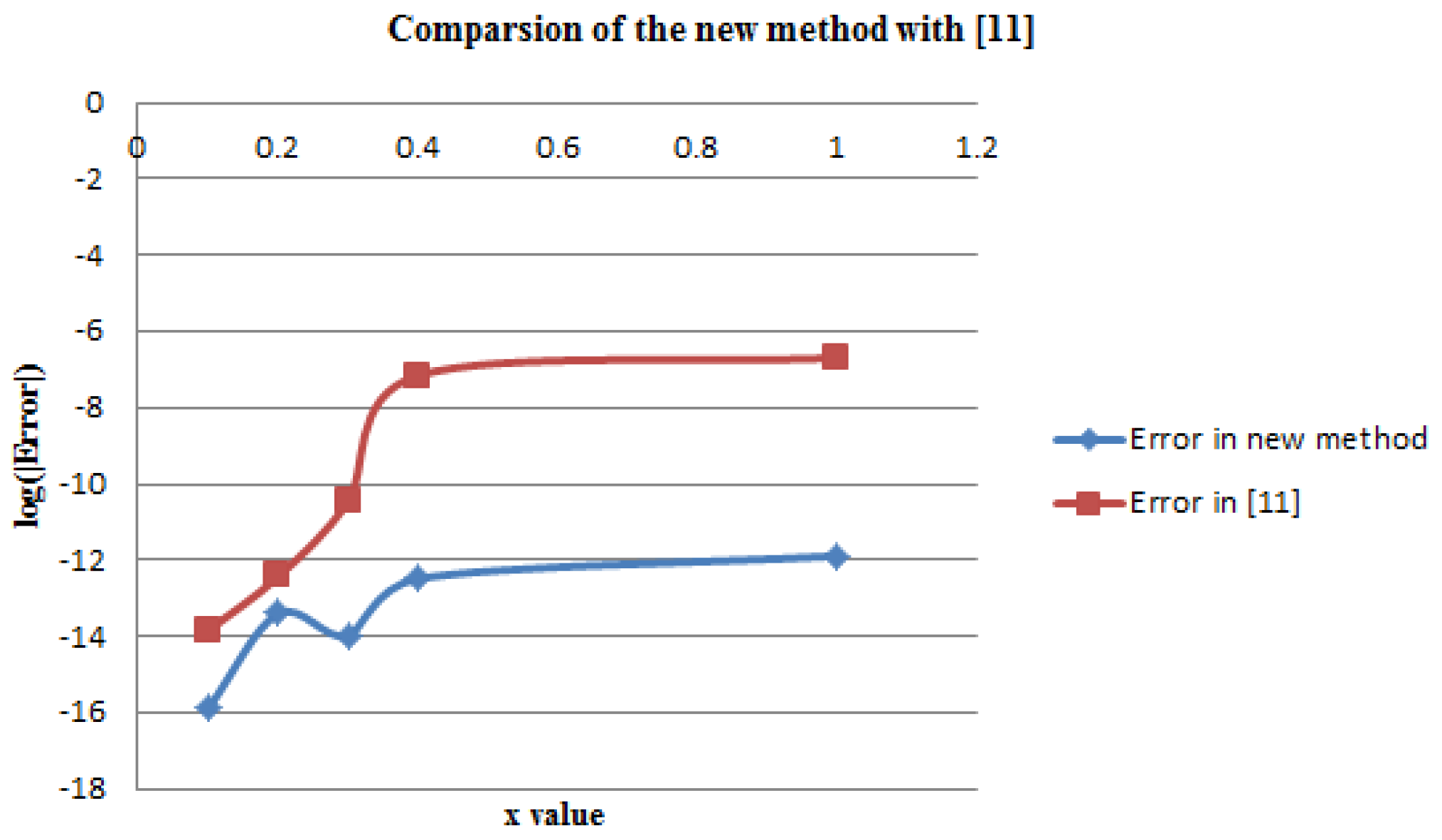
Table 7, the results of the developed method are more accurate than that of [
11] which was executed by six-step block method for solving Problem 4.
- Problem 1:
Exact solution: y1 = cos x, y2 = πx
- Problem 2:
Exact solution: y1 = cos x, y2 = ex cos x
- Problem 3:
Exact solution: y1 = cos x, y2 = sin x
- Problem 4:
.
Exact solution
The numerical results confirm that the proposed method produces better accuracy if compared with the existing methods. This is also clear in the graph below (
Figure 1).
6. Conclusions
In this article, a one-step block method with three off-step points is derived via the interpolation collocation approach. The developed method is consistent, zero-stable, convergent, with a region of absolute stability and order five. The numerical results generated when the new developed method was applied to three systems of second-order initial value problems above have shown the high accuracy of the new method.
Author Contributions
Both authors equally contributed to this work.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Omar, Z.; Sulaiman, M. Parallel r-point implicit block method for solving higher order ordinary differential equations directly. J. ICT 2004, 3, 53–66. [Google Scholar]
- Kayode, S.J.; Adeyeye, O. A 3-step hybrid method for direct solution of second order initial value problems. Aust. J. Basic Appl. Sci. 2011, 5, 2121–2126. [Google Scholar]
- James, A.; Adesanya, A.; Joshua, S. Continuous block method for the solution of second order initial value problems of ordinary differential equation. Int. J. Pure Appl. Math. 2013, 83, 405–416. [Google Scholar] [CrossRef]
- Omar, Z.; Suleiman, M.B. Parallel two-point explicit block method for solving high-order ordinary differential equations. Int. J. Simul. Process Model. 2006, 2, 227–231. [Google Scholar] [CrossRef]
- Vigo-Aguiar, J.; Ramos, H. Variable stepsize implementation of multistep methods for y = f (x, y, y’). J. Comput. Appl. Math. 2006, 192, 114–131. [Google Scholar] [CrossRef]
- Adesanya, A.O.; Anake, T.A.; Udo, O. Improved continuous method for direct solution of general second order ordinary differential equations. J. Niger. Assoc. Math. Phys. 2008, 13, 59–62. [Google Scholar]
- Awoyemi, D.O. A P-stable linear multistep method for solving general third order of ordinary differential equations. Int. J. Comput. Math. 2003, 80, 985–991. [Google Scholar] [CrossRef]
- Henrici, P. Some Applications of the Quotient-Difference Algorithm. Proc. Symp. Appl. Math. 1963a, 15, 159–183. [Google Scholar]
- Lambert, J.D. Computational Methods in ODEs; John Wiley and Sons: New York, NY, USA, 1973. [Google Scholar]
- Henrici, P. Discrete Variable Methods in ODE; John Wiley and Sons: New York, NY, USA, 1962. [Google Scholar]
- Kuboye, J.O.; Omar, Z. Derivation of a Six-Step Block method for direct solution of second order ordinary differential Equations. Math. Comput. Appl. 2015, 20, 151–159. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).



{kind=link}