Hypersurfaces with Generalized 1-Type Gauss Maps

1
Department of Mathematics Education and RINS, Gyeongsang National University, Jinju 52828, Korea
2
Department of Mathematics, Chonnam National University, Gwangju 61186, Korea
3
Department of Mathematics, Kyungpook National University, Daegu 41566, Korea
*
Author to whom correspondence should be addressed.
Mathematics 2018, 6(8), 130; https://doi.org/10.3390/math6080130
Submission received: 18 May 2018
/
Revised: 18 July 2018
/
Accepted: 23 July 2018
/
Published: 26 July 2018
(This article belongs to the Special Issue Differential Geometry)
{kind=link}
{kind=link}
Abstract
:In this paper, we study submanifolds in a Euclidean space with a generalized 1-type Gauss map. The Gauss map, G, of a submanifold in the n-dimensional Euclidean space, , is said to be of generalized 1-type if, for the Laplace operator, , on the submanifold, it satisfies , where C is a constant vector and f and g are some functions. The notion of a generalized 1-type Gauss map is a generalization of both a 1-type Gauss map and a pointwise 1-type Gauss map. With the new definition, first of all, we classify conical surfaces with a generalized 1-type Gauss map in . Second, we show that the Gauss map of any cylindrical surface in is of the generalized 1-type. Third, we prove that there are no tangent developable surfaces with generalized 1-type Gauss maps in , except planes. Finally, we show that cylindrical hypersurfaces in always have generalized 1-type Gauss maps.
1. Introduction
The notion of finite type submanifolds in a Euclidean space or a pseudo-Euclidean space was introduced by Chen in the 1980s [1]. He also extended this notion to a general differential map, namely, the Gauss map, on the submanifolds. The notions of finite type immersion and finite type Gauss map are useful tools for investigating and characterizing many important submanifolds [1,2,3,4,5,6,7,8,9,10,11,12]. Moreover, Chen et al. dealed with the finite type Gauss map as an immersion and with its relation to the topology of some submanifolds [13,14].
The simplest type of finite type Gauss map is the 1-type. A submanifold, M, of a Euclidean space or a pseudo-Euclidean space has a 1-type Gauss map if the Gauss map, G, of M satisfies
for some and has a constant vector, C, where denotes the Laplace operator defined on M. Planes, circular cylinders and spheres in are typical examples of surfaces with 1-type Gauss maps.
As a generalization of a 1-type Gauss map, the first and third authors introduced the notion of a pointwise 1-type Gauss map of submanifolds in reference [15]. A submanifold is said to have a pointwise 1-type Gauss map if the Laplacian of its Gauss map, G, takes the form
for a non-zero smooth function, f, and a constant vector, C. More precisely, a pointwise 1-type Gauss map is said to be of the first kind if in (2); otherwise, it is said to be of the second kind. A helicoid, a catenoid and a right cone in are typical examples of surfaces with pointwise 1-type Gauss maps. Many results of submanifolds with pointwise 1-type Gauss maps in ambient spaces were obtained in references [6,16,17,18,19,20,21,22,23,24,25,26,27]. On the other hand, it is well-known that a circular cylinder in has a usual 1-type Gauss map. However, we consider the following cylindrical surface parameterized by
Then, the Gauss map, G, of the surface is given by
We can easily show that the Gauss map, G, satisfies
which yields a Gauss map, G, that is neither of usual 1-type, nor of pointwise 1-type.
In this reason, we have the following definition:
Definition 1.
A submanifold, M, of a Euclidean space is said to have a generalized 1-type Gauss map if the Gauss map, G, on M satisfies the equation
for some smooth functions () and has a constant vector, C.
If both f and g are constant in (3), then M has a 1-type Gauss map. If in (3), then M has a pointwise 1-type Gauss map. Hence, the notion of a generalized 1-type Gauss map is a generalization of both a 1-type Gauss map and a pointwise 1-type Gauss map.
In [22], Dursun studied flat surfaces in with a pointwise 1-type Gauss map and proved the following proposition.
Proposition 1.
where is a unit speed planar base curve with curvature satisfying the ordinary differential equation
for some real numbers, a and , and the director vector .
Let M be a flat surface in . Then, M has a pointwise 1-type Gauss map of the second kind if and only if M is an open part of one of the following surfaces:
- (1)
- A plane in ,
- (2)
- A right circular cone in ,
- (3)
- A cylinder, up to a rigid motion, parameterized by
In this paper, we study developable surfaces in : cylindrical surfaces, conical surfaces and tangent developable surfaces. In Section 3, we completely classify developable surfaces with generalized a 1-type Gauss map and give some examples. In the last section, we prove that cylindrical hypersurfaces in always have generalized 1-type Gauss maps.
Throughout this paper, we assume that all objects are smooth and all surfaces are connected unless mentioned.
2. Preliminaries
Let be an isometric immersion from an n-dimensional Riemannian manifold, M, into Denote the Levi–Civita connections of M and by ∇ and , respectively. Let X and Y be vector fields tangent to M, and let be a unit normal vector field of M. Then, the Gauss and Weingarten formulas are given by
respectively. Here, h is the second fundamental form; D is the normal connection defined on the normal bundle; and is the shape operator (or the Weingarten operator) in the direction of on M. Note that the second fundamental form, h, and the shape operator, , are related by
The mean curvature vector field, , is defined by
where is the trace of h. The mean curvature, H, of M is given by .
Moreover, the Laplace operator, , acting on a scalar valued function, , is given by
where is an orthonormal local tangent frame on M. Or, locally, it is expressed as
where and g denote the inverse matrix and the determinant of the matrix , respectively, with the coefficients of the Riemannian metric on M induced from that of .
3. Surfaces with Generalized 1-Type Gauss Maps
In this section, we completely classify developable surfaces in with a generalized 1-type Gauss map.
A regular surface in whose Gaussian curvature vanishes is called a developable surface, whose surface is a cylindrical surface, a conical surface or a tangent developable surface [28].
For a hypersurface in a Euclidean space, the next lemma plays an important role in our paper [21].
Lemma 1.
Let M be a hypersurface of . Then, the Laplacian of the Gauss map, G, is given by
where is the gradient of the mean curvature, H; is the shape operator of M; and .
Suppose that a developable surface in has a generalized 1-type Gauss map, that is, the Gauss map G of the surface satisfies the condition
for some smooth functions, , and a constant vector, C. It follows from (10) that M has generalized 1-type Gauss map with , that is, M has a pointwise 1-type Gauss map of the first kind if and only if M has a constant mean curvature, H. If f and g are equal to each other with , then M has a pointwise 1-type Gauss map of the second kind and the results occur in [22]. Therefore, sometimes, in the proof of this paper, we assume that has non-zero functions and .
By combining (10) and (11) and taking the inner product with the orthonormal local frame and G, respectively, we have
where with , and .
3.1. Conical Surfaces
A conical surface, M, in can be parametrized by
such that , where is a constant vector. We take the orthonormal tangent frame, , on M such that and . The Gauss map of M is given by . Through a direct calculation, we have
where denotes the geodesic curvature of in the unit sphere, . We may assume that ; otherwise, the conical surface is an open part of a plane. Furthermore, by reversing the orientation of the spherical curve, , we may assume that the geodesic curvature, , of is positive. It follows from (13) that the mean curvature, H, and the trace, , of the square of the shape operator are given by
Suppose that M has a generalized 1-type Gauss map, that is, the Gauss map, G, of the conical surface satisfies (11). Then, since , and , the components of the constant vector, C, are functions of only s. Let us differentiate , and with respect to . Then, from (13), we have the following:
Since , is a non-zero constant, say c, we obtain
Thus, it follows from (15) that we have
Thus, from (27) and (28) we see that the function must satisfy the following nonlinear differential equation of order 3:
In order to solve (29), first, we put . Then the differential equation (29) becomes
which can be rewritten as
Since , we divide into two cases, as follows.
Case 1.. The geodesic curvature, , is a nonzero constant, that is, the spherical curve, , is a small circle. Therefore, M is an open part of a right circular cone, and M has a pointwise 1-type Gauss map.
Case 2..
From (30), we obtain
which yields
for some constant, a. By integrating (32), we have
for some constant, b. Recalling , from (33), one gets
which is equivalent to
Hence, for an indefinite integral, , of the function , we see that
where the signature is determined according to whether the derivative of is positive or not. Thus we get
Conversely, for some constants, a and b, such that the function
is well-defined on some interval, , we take an indefinite integral, , of the function . If we denote the image of the function, F, by I, then is a strictly increasing function with . Let us consider the function , defined by , which maps the interval, , onto J, respectively. Here means the interval . Then, the function is positive for the interval (say, I) and satisfies .
For any unit speed spherical curve in the unit sphere with the geodesic curvature , we consider a surface M in to be parametrized by
where is a constant vector. Given any non-zero constant, c, we put
For the orthonormal tangent frame, , on M, such that and and the Gauss map of M given by , we put
Note that it follows from the definition of that the function satisfies (29). Hence, by using (13), it is straightforward to show that
which implies that C is a constant vector. Furthermore, similar to the first part of this subsection, the Gauss map, G, of the conical surface, M, satisfies
where and C are given in (42) and (43), respectively. This shows that M has a generalized 1-type Gauss map.
Thus, we have the following theorem 1:
Theorem 1.
A conical surface in has a generalized 1-type Gauss map if and only if it is an open part of one of the following surfaces:
- (1)
- A plane,
- (2)
- A right circular cone,
- (3)
- A conical surface parameterized bywhere is a constant vector and is a unit speed spherical curve in the unit sphere with a positive geodesic curvature, , which for some indefinite integral of the function with , is given by
3.2. Cylindrical Surfaces
In this subsection, we prove the following theorem:
Theorem 2.
All cylindrical surfaces in have a generalized 1-type Gauss map.
Proof.
Let M be a cylindrical surface in generated by a base curve, , and a constant vector, . Then, M can be parametrized by
such that and . Hence, the base curve, , is a unit speed plane curve. Let us denote the curvature function of by .
Consider an orthonormal frame on M such that and . Then, the Gauss map, G, of M is given by . By direct calculation, we obtain
It follows from (45) that the mean curvature, H, and the trace of the square of the shape operator are given by
which are functions of only s.
First, suppose that M has a generalized 1-type Gauss map. Together with (46), the first equation of (12) shows that . Hence, (12) can be rewritten as
Since and , and are functions of only s. By differentiating and with respect to , the component functions of C satisfy the following equations:
which yield for some non-zero constant, c. We may put
with . Therefore, the constant vector, C, becomes
Conversely, for any cylindrical surface, we choose a curve, , and a unit vector, , such that the cylindrical surface is parametrized by with . Then, for a non-zero constant, c, and an indefinite integral, , of the curvature function, , of , we put
where , and . It follows from (45) that and , which shows that C is a constant vector. Furthermore, it is straightforward to show that the Gauss map, G, of the cylindrical surface satisfies
where and C are given in (51) and (52), respectively. This shows that the cylindrical surface has a generalized 1-type Gauss map. ☐
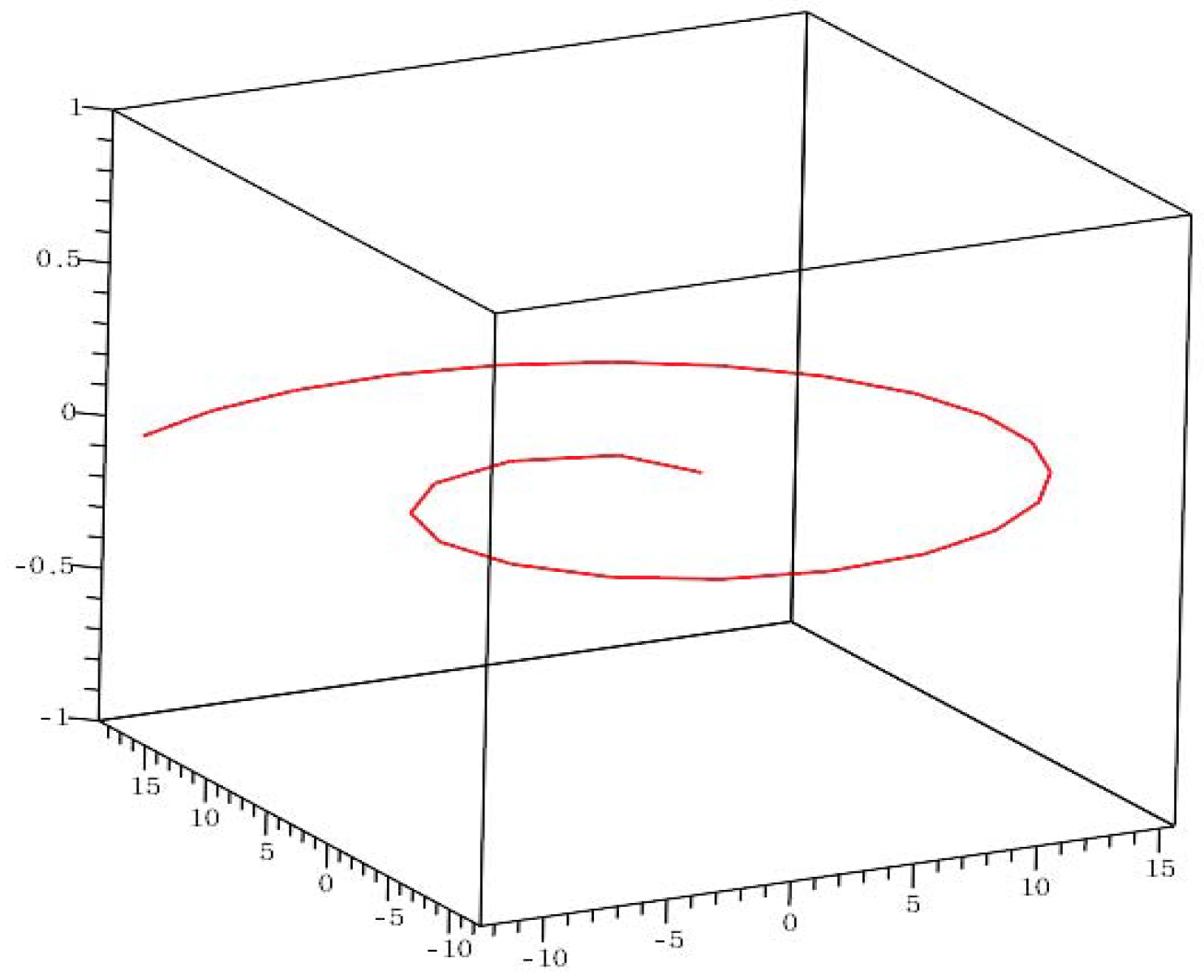
Example 1.
We consider the surface to be parameterized by
Then, the surface is cylindrical, generated by the plane curve with the curvature , and its Gauss map G is given by
From this, the Laplacian of G can be expressed as
where .
3.3. Tangent Developable Surfaces
In this subsection, we prove the following theorem:
Theorem 3.
A tangent developable surface in with a generalized 1-type Gauss map is an open part of a plane.
Proof.
Let M be a tangent developable surface in . Then, M is locally parametrized by
where is a unit speed curve with non-zero curvature in . Let us denote the unit tangent vector, principal normal vector and binormal vector of , by and B, respectively. The natural frames, of x, are given by
The parametrization x is regular whenever . We take the orthonormal frame, , on M such that
Then, the Gauss map, G, of M is given by . By direct calculation, we obtain
which yields
Now, we suppose that the tangent developable surface, M, has a generalized 1-type Gauss map. Since , and , the components of C are functions of s only. Hence, it follows from (54) that the components of C satisfy the following:
Since the parameter is arbitrary, from (63), we have
Finally, we suppose that the torsion, , of the curve, , does not vanish identically. Then, since the set is non-empty, (64) shows that and . From this and (57), we have . In the long run, one gets . It follows from (12) and (55) that the mean curvature, , is constant, which shows that must vanish identically. That is, is empty, which leads a contradiction. This yields that is a plane curve, and hence, M is an open part of a plane. This completes the proof of Theorem 6. ☐
Note that a plane is a kind of cylindrical surface and also a kind of circular right cone. Thus, by summarizing all the results in this section, we established the following classification theorem for developable surfaces with generalized 1-type Gauss maps:
Theorem 4.
(Classification Theorem) A developable surface, M, in has a generalized 1-type Gauss map if and only if it is an open part of one of the following:
- (1)
- A cylindrical surface,
- (2)
- A circular right cone,
- (3)
- A conical surface parameterized bywhere is a constant vector and is a unit speed spherical curve in the unit sphere, , with a positive geodesic curvature, , which is, for some indefinite integral, , of the function with , given by
4. Cylindrical Hypersurfaces with Generalized 1-Type Gauss Maps
In this section, we study cylindrical hypersurfaces with generalized 1-type Gauss maps in . Suppose that a hypersurface, M, in has a generalized 1-type Gauss map, that is, the Gauss map, G, of the hypersurface satisfies the condition
for some non-zero smooth functions, , and a non-zero constant vector, C. By combining (10) and (65) and taking the scalar product with the orthonormal local frame, of M and the Gauss map, G, respectively, we obtain
and
where, for , and .
By extending Theorem 3.3, finally, we prove the following theorem:
Theorem 5.
A cylindrical hypersurface, M, in has a generalized 1-type Gauss map.
Proof.
Let M be a cylindrical hypersurface in the -dimensional Euclidean space, . Then, M can be parametrized by
such that , and . Then, the generator is a plane curve with the Frenet frame and we have the orthonormal frame on M, such that and . Hence, by rearranging , if necessary, we may assume that the Gauss map, G, of M is given by . By direct calculation, we get
where is the curvature function of the generator, . (68) implies that
which are the functions of only s.
Now, suppose that M has a generalized 1-type Gauss map. That is, G satisfies (65). Then, C in can be expressed as in the frame . Together with (69), (66) implies that because , but for . Hence, we have
Hence, and are functions of s only. By differentiating (70) with respect to , (68) also gives
with for some non-zero constant, d. Hence, we may put
where is an indefinite integral of the curvature function . Therefore, the constant vector, C, is given by
Conversely, for a cylindrical hypersurface, M, in , we may choose a curve, , and n unit vectors such that M is parametrized by
such that , and . For a non-zero constant, d, and an indefinite integral, , of the curvature function of , we put
where , and for . It follows from (68) that and , and hence, C is a constant vector. Furthermore, it is straightforward to show that the Gauss map of M satisfies
where and C are given in (75) and (76), respectively. This shows that the cylindrical hypersurface has a generalized 1-type Gauss map. ☐
5. Conclusions
To find the best possible estimate of the total mean curvature of a compact submanifold of Euclidean space, Chen introduced the study of finite type submanifolds. Specifically, minimal submanifolds are characterized in a natural way. In our example, a cylindrical surface has neither a usual 1-type, nor a pointwise 1-type Gauss map. In this reason, we defined a new definiton, the generalized 1-type Gauss map. After that, we characterized developable surfaces with a generalized 1-type Gauss map in .
Author Contributions
D.W.Y. and J.W.L. gave the idea of establishing generalized finite type surfaces on Euclidean space. D.-S.K. and Y.H.K. checked and polished the draft.
Funding
The first author was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education (2015R1D1A1A01060046). The second author was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education (2015020387). The fourth author, the corresponding author, was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education (2017R1D1A1B03033978).
Acknowledgments
We would like to thank the referee for the careful review and the valuable comments which really improved the paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Chen, B.-Y. On submanifolds of finite type. Soochow J. Math. 1983, 9, 65–81. [Google Scholar]
- Chen, B.-Y. Total Mean Curvature and Submanifolds of Finite Type; World Scientific Publishing Company: Singapore, 1984. [Google Scholar]
- Baikoussis, C. Ruled submanifolds with finite type Gauss map. J. Geom. 1994, 49, 42–45. [Google Scholar] [CrossRef]
- Baikoussis, C.; Defever, F.; Koufogiorgos, T.; Verstraelen, L. Finite type immersions of flat tori into Euclidean spaces. Proc. Edinb. Math. Soc. 1995, 38, 413–420. [Google Scholar] [CrossRef]
- Chen, B.-Y.; Piccinni, P. Submanifolds with finite type Gauss map. Bull. Aust. Math. Soc. 1987, 35, 161–186. [Google Scholar] [CrossRef]
- Ki, U.-H.; Kim, D.-S.; Kim, Y.H.; Roh, Y.-M. Surfaces of revolution with pointwise 1-type Gauss map in Minkowski 3-space. Taiwan. J. Math. 2009, 13, 317–338. [Google Scholar] [CrossRef]
- Dillen, F.; Pas, J.; Vertraelen, L. On surfaces of finite type in Euclidean 3-space. Kodai Math. J. 1990, 13, 10–21. [Google Scholar] [CrossRef]
- Kim, D.-S.; Kim, Y.H. Some classification results on finite type ruled submanifolds in a Lorentz-Minkowski space. Taiwan. J. Math. 2012, 16, 1475–1488. [Google Scholar] [CrossRef]
- Kim, D.-S.; Kim, Y.H.; Jung, S.M. Some classifications of ruled submanifolds in Minkowski space and their Gauss map. Taiwan. J. Math. 2014, 18, 1021–1040. [Google Scholar] [CrossRef]
- Kim, D.-S.; Kim, Y.H.; Yoon, D.W. Characterization of generalized B-scrolls and cylinders over finite type curves. Indian J. Pure Appl. Math. 2003, 34, 1523–1532. [Google Scholar]
- Kim, D.-S.; Kim, Y.H.; Yoon, D.W. Finite type ruled surfaces in Lorentz-Minkowski space. Taiwan. J. Math. 2007, 11, 1–13. [Google Scholar] [CrossRef]
- Yoon, D.W. Rotation surfaces with finite type Gauss map in . Indian J. Pure Appl. Math. 2001, 32, 1803–1808. [Google Scholar]
- Chen, B.-Y.; Morvan, J.M.; Nore, T. Energie, tension et ordre des applications a valeurs dans un espace eucliden. CRAS Paris 1985, 301, 123–126. [Google Scholar]
- Chen, B.-Y.; Morvan, J.M.; Nore, T. Energie, tension and finite type maps. Kodai Math. J. 1986, 9, 408–418. [Google Scholar] [CrossRef]
- Kim, Y.H.; Yoon, D.W. Ruled surfaces with pointwise 1-type Gauss map. J. Geom. Phys. 2000, 34, 191–205. [Google Scholar] [CrossRef]
- Aksoyak, F.K.; Yayli, Y. Boost invariant surfaces with pointwise 1-type Gauss map in Minkowski 4-space . Bull. Korean Math. Soc. 2014, 51, 1863–1874. [Google Scholar] [CrossRef]
- Arslan, K.; Bulca, B.; Milousheva, V. Meridian surfaces in with pointwise 1-type Gauss map. Bull. Korean Math. Soc. 2014, 51, 911–922. [Google Scholar] [CrossRef]
- Chen, B.-Y.; Choi, M.; Kim, Y.H. Surfaces of revolution with pointwise 1-type Gauss map. J. Korean Math. Soc. 2005, 42, 447–455. [Google Scholar] [CrossRef]
- Choi, M.; Kim, D.-S.; Kim, Y.H.; Yoon, D.W. Circular cone and its Gauss map. Colloq. Math. 2012, 129, 203–210. [Google Scholar] [CrossRef]
- Choi, M.; Kim, Y.H.; Yoon, D.W. Classification of ruled surfaces with pointwise 1-type Gauss map in Minkowski 3-space. Taiwan. J. Math. 2011, 15, 1141–1161. [Google Scholar] [CrossRef]
- Dursun, U. Hypersurfaces with pointwise 1-type Gauss map. Taiwan. J. Math. 2007, 11, 1407–1416. [Google Scholar] [CrossRef]
- Dursun, U. Flat surfaces in the Euclidean space with pointwise 1-type Gauss map. Bull. Malays. Math. Sci. Soc. 2010, 33, 469–478. [Google Scholar]
- Dursun, U.; Bektas, B. Spacelike rotational surfaces of elliptic, hyperbolic and parabolic types in Minkowski space with pointwise 1-type Gauss map. Math. Phys. Anal. Geom. 2014, 17, 247–263. [Google Scholar] [CrossRef]
- Dursun, U.; Turgay, N.C. General rotational surfaces in Euclidean space with pointwise 1-type Gauss map. Math. Commun. 2012, 17, 71–81. [Google Scholar]
- Kim, Y.H.; Yoon, D.W. On the Gauss map of ruled surfaces in Minkowski space. Rocky Mt. J. Math. 2005, 35, 1555–1581. [Google Scholar] [CrossRef]
- Turgay, N.C. On the marginally trapped surfaces in 4-dimensional space-times with finite type Gauss map. Gen. Relativ. Gravit. 2014, 46, 1621. [Google Scholar] [CrossRef]
- Yoon, D.W. Surfaces of revolution in the three dimensional pseudo-Galilean space. Glas. Mat. 2013, 48, 415–428. [Google Scholar] [CrossRef] [Green Version]
- Vaisman, I. A First Course in Differerential Geometry; Dekker: New York, NY, USA, 1984. [Google Scholar]
Figure 1.
The plane curve in Example 1.

Figure 2.
The cylindrical surface in Example 1.

© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Yoon, D.W.; Kim, D.-S.; Kim, Y.H.; Lee, J.W. Hypersurfaces with Generalized 1-Type Gauss Maps. Mathematics 2018, 6, 130. https://doi.org/10.3390/math6080130
AMA Style
Yoon DW, Kim D-S, Kim YH, Lee JW. Hypersurfaces with Generalized 1-Type Gauss Maps. Mathematics. 2018; 6(8):130. https://doi.org/10.3390/math6080130
Chicago/Turabian StyleYoon, Dae Won, Dong-Soo Kim, Young Ho Kim, and Jae Won Lee. 2018. "Hypersurfaces with Generalized 1-Type Gauss Maps" Mathematics 6, no. 8: 130. https://doi.org/10.3390/math6080130
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.