A Modified Model Predictive Power Control for Grid-Connected T-Type Inverter with Reduced Computational Complexity

 , , , and
, , , and
Abstract
:1. Introduction
2. Dynamic Modeling for Grid-Connected 3L-T-Type Inverter
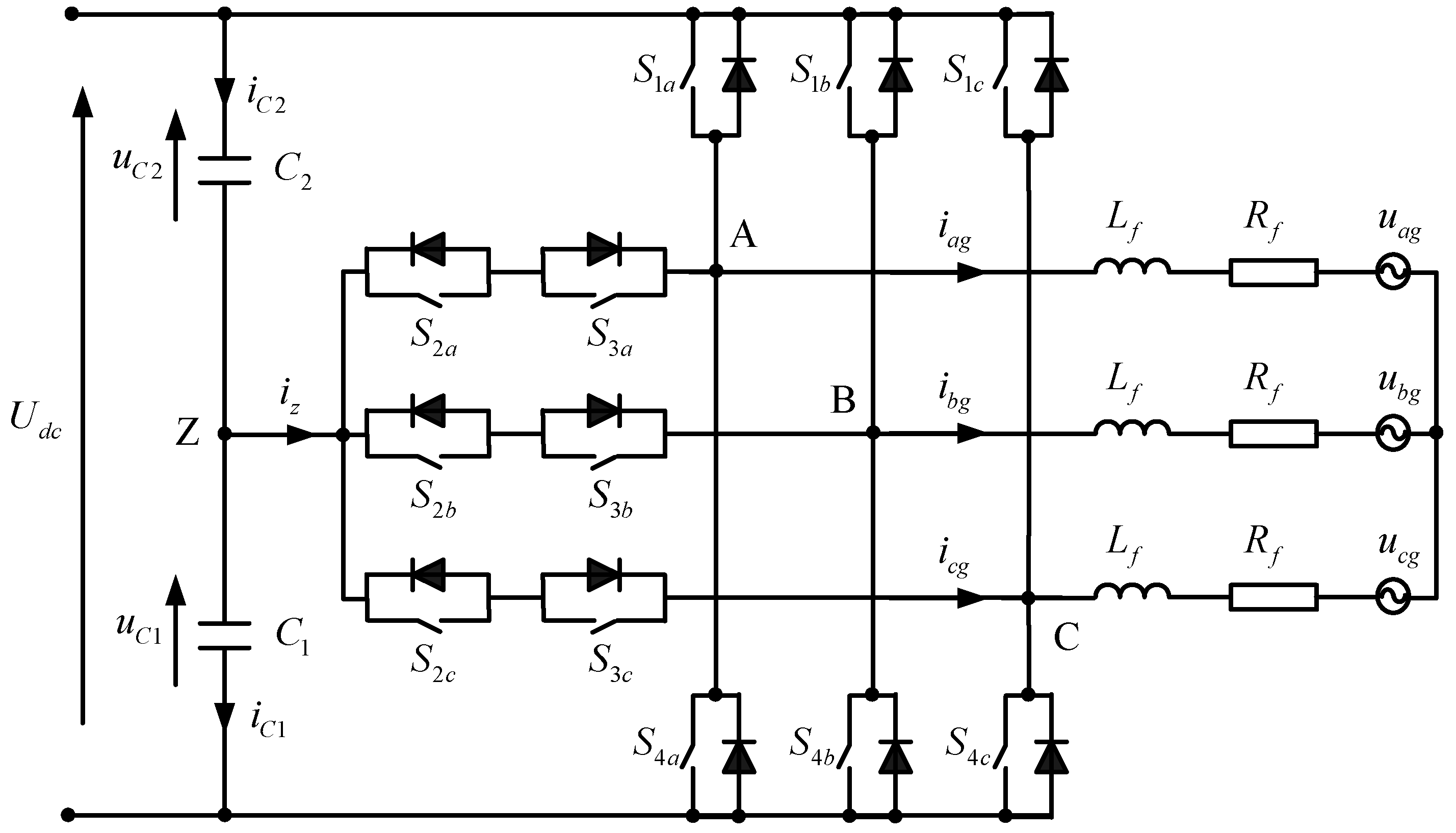
2.1. Configuration of the Grid-Connected 3L-T-Type Inverter
2.2. Mathematical Model
3. Proposed Control Strategy Based on Model Predictive Control
- Follow the active and reactive power references.
- Ensure the capacitor voltage balancing.
- Decrease the frequency of the switches.
- (1)
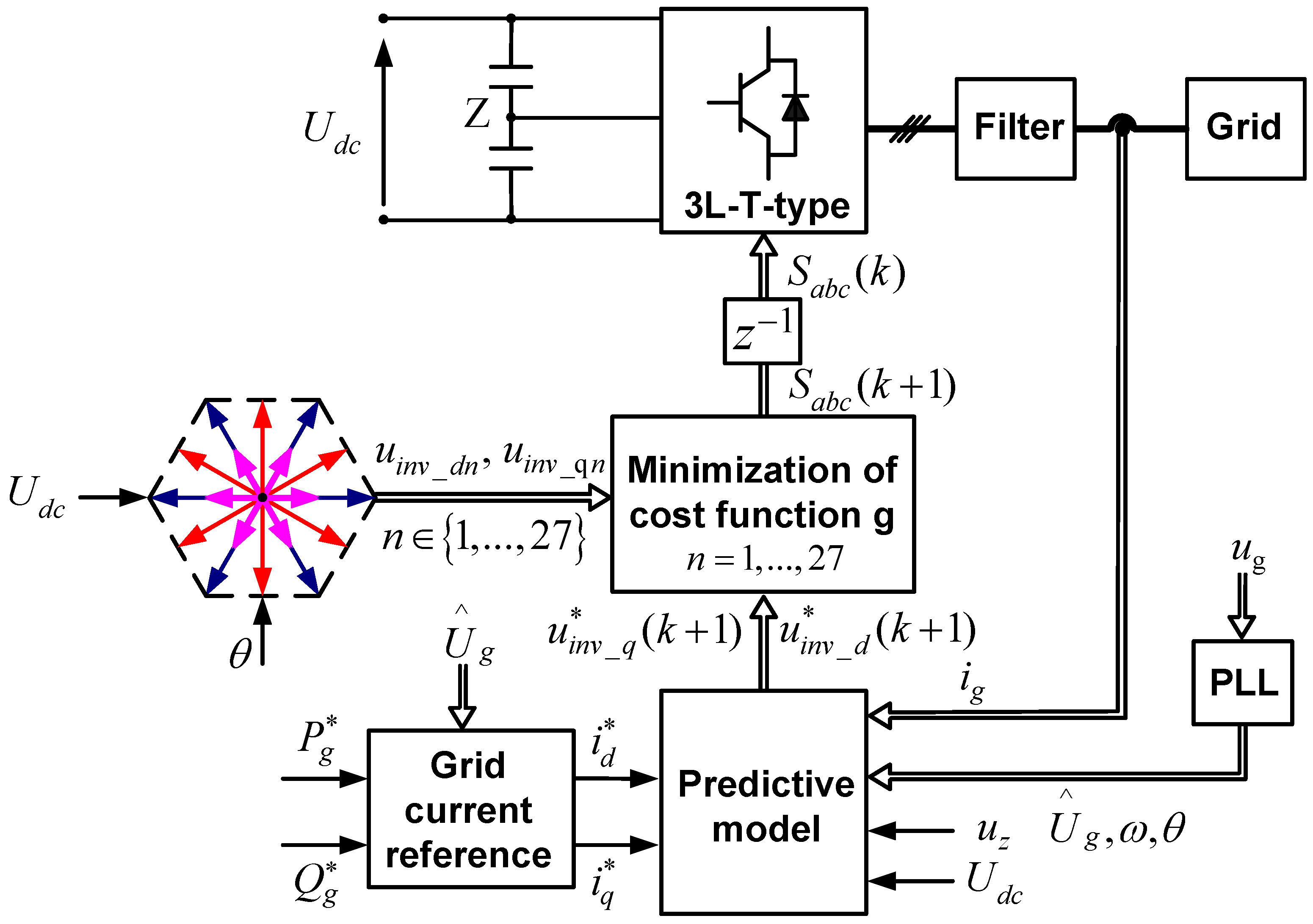
- Estimate the grid current: The grid current components and at time are evaluated by utilizing Equation (15) with the previous optimal switching state () at time k.
- (2)
- Calculate the inverter voltage reference: According to Equation (16), the reference components of inverter voltage and at time are calculated in regard to the grid current references , at time and estimated grid currents and at time . Then, the neutral-point voltage at time is computed from grid current and all admissible switching states switching states .
- (3)
- Evaluate and select the best control input: The optimal control input that has the lowest of the cost function is implemented at time to the 3L-T-type inverter:where and represent the desired inverter voltages at instant ; and and stand for all possible inverter voltage components in synchronous reference frame.
| Algorithm 1 Algorithm of modified model predictive power control with reduced computational complexity. |
| Input: Output:. 1. Estimate the grid current and based on (15). 2. Compute the inverter voltage components in the synchronous reference frame and , with according to (9). 3. Calculate the grid current references and inverter voltage based on (11) and (16). 4. Estimate for all switching states based on (13). 5. Predict the neutral-point voltage by using (18). 6. Evaluate the cost function from (19). 7. Select the optimal switching state : ; Return to step 1. |
4. Simulation and Experimental Results
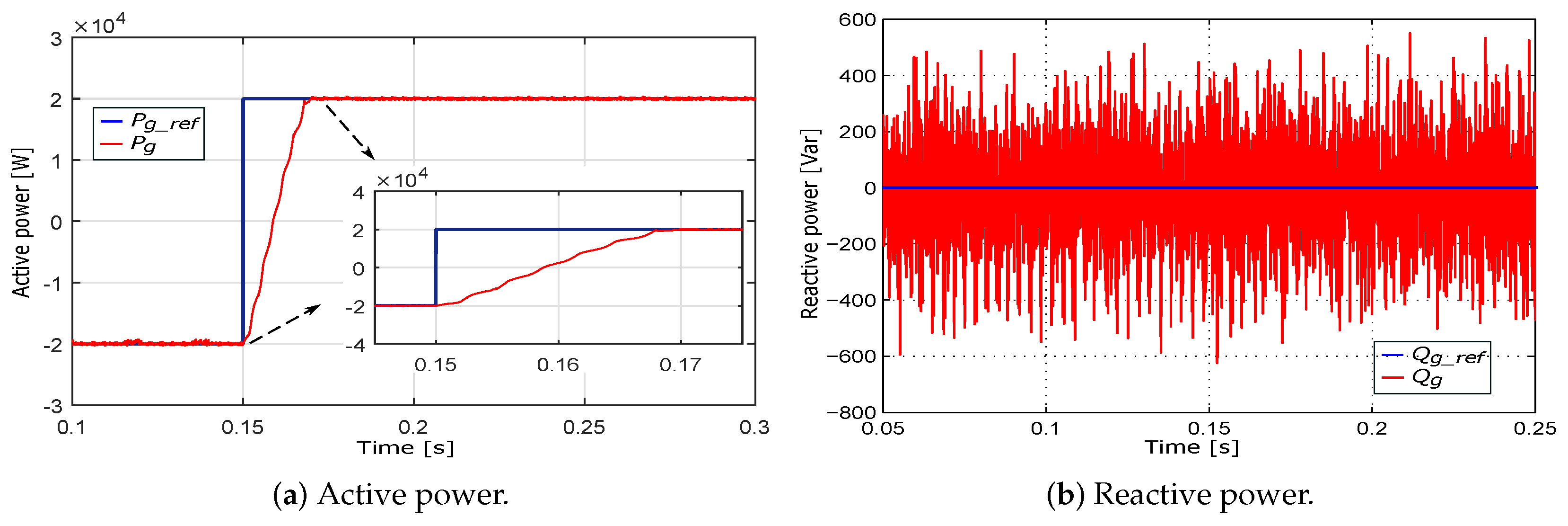
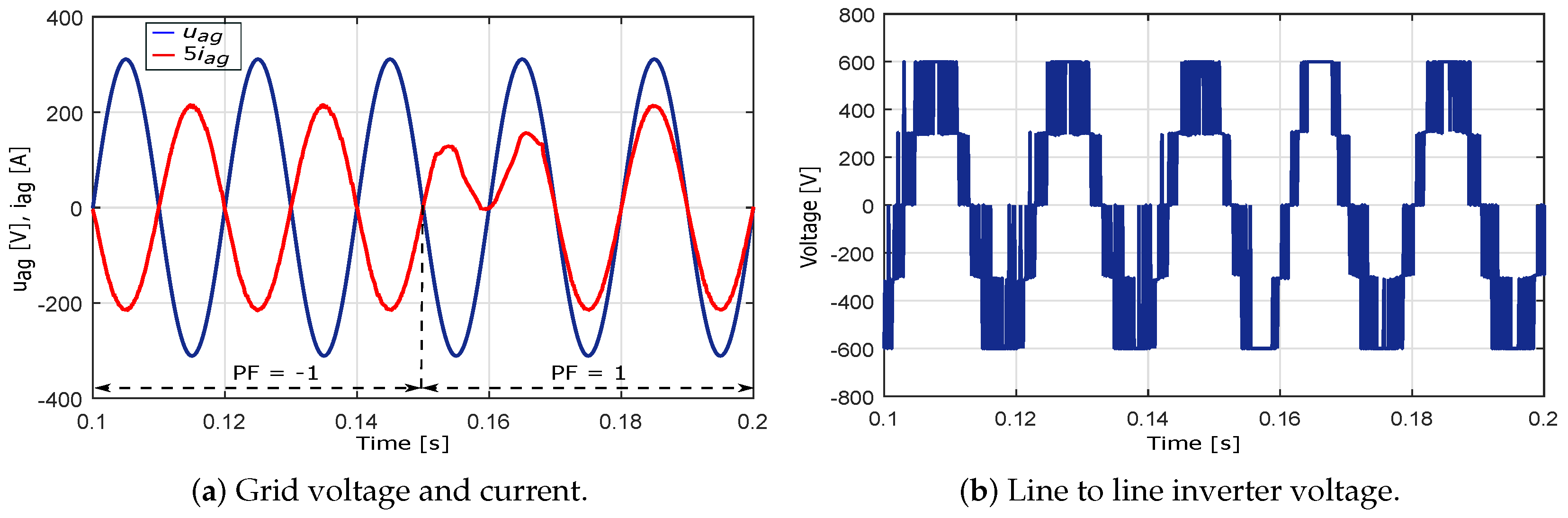
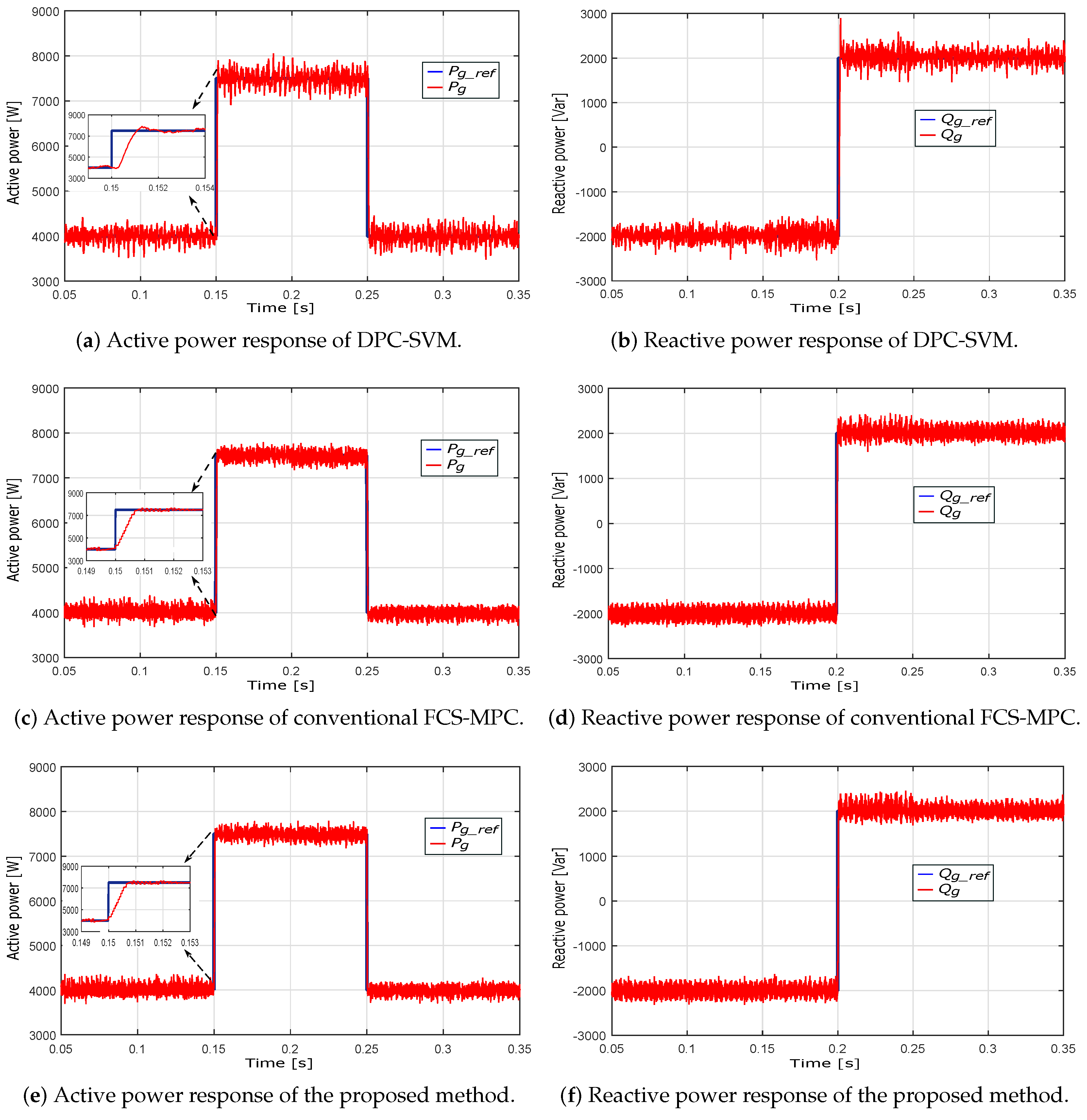
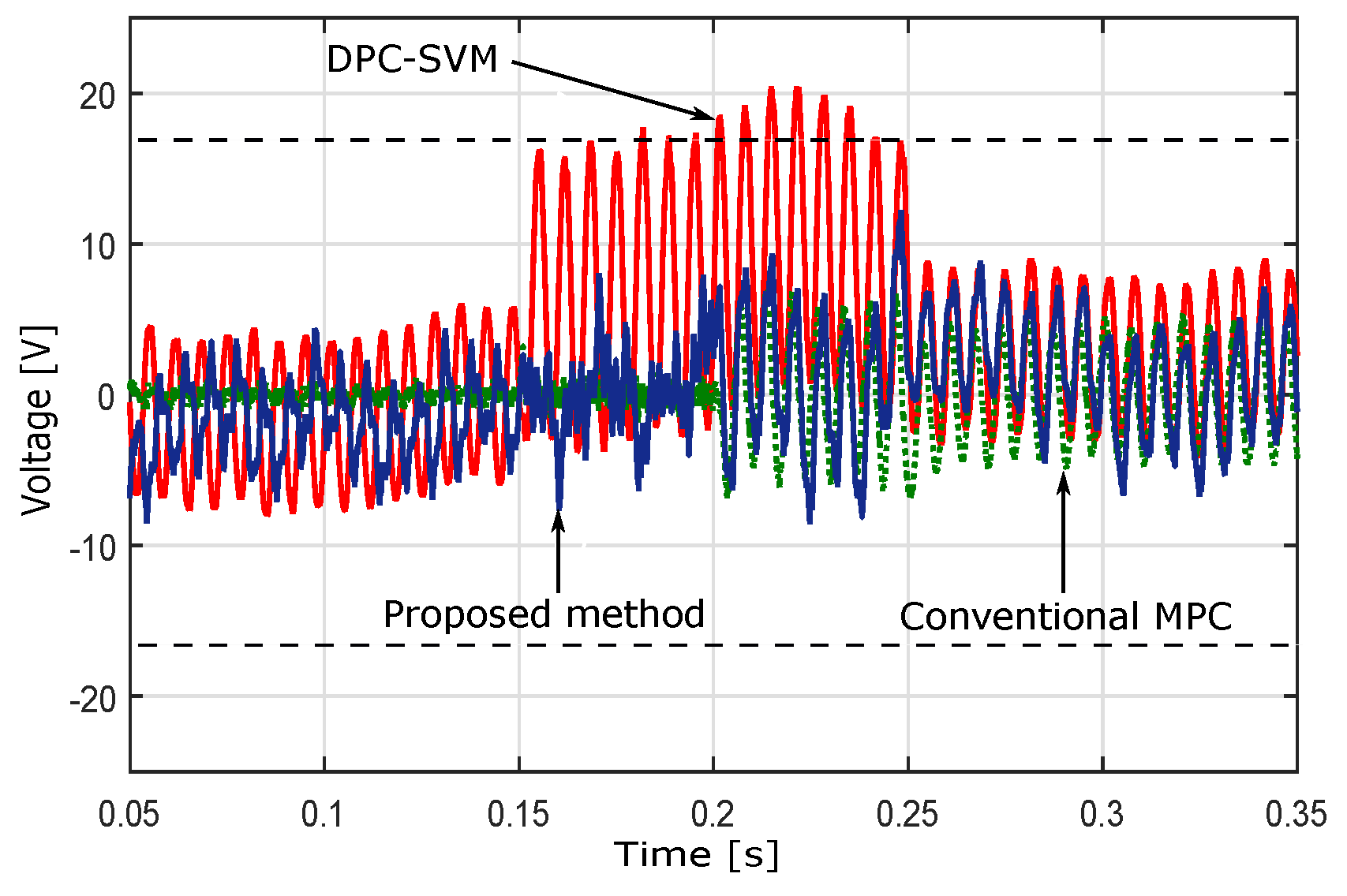
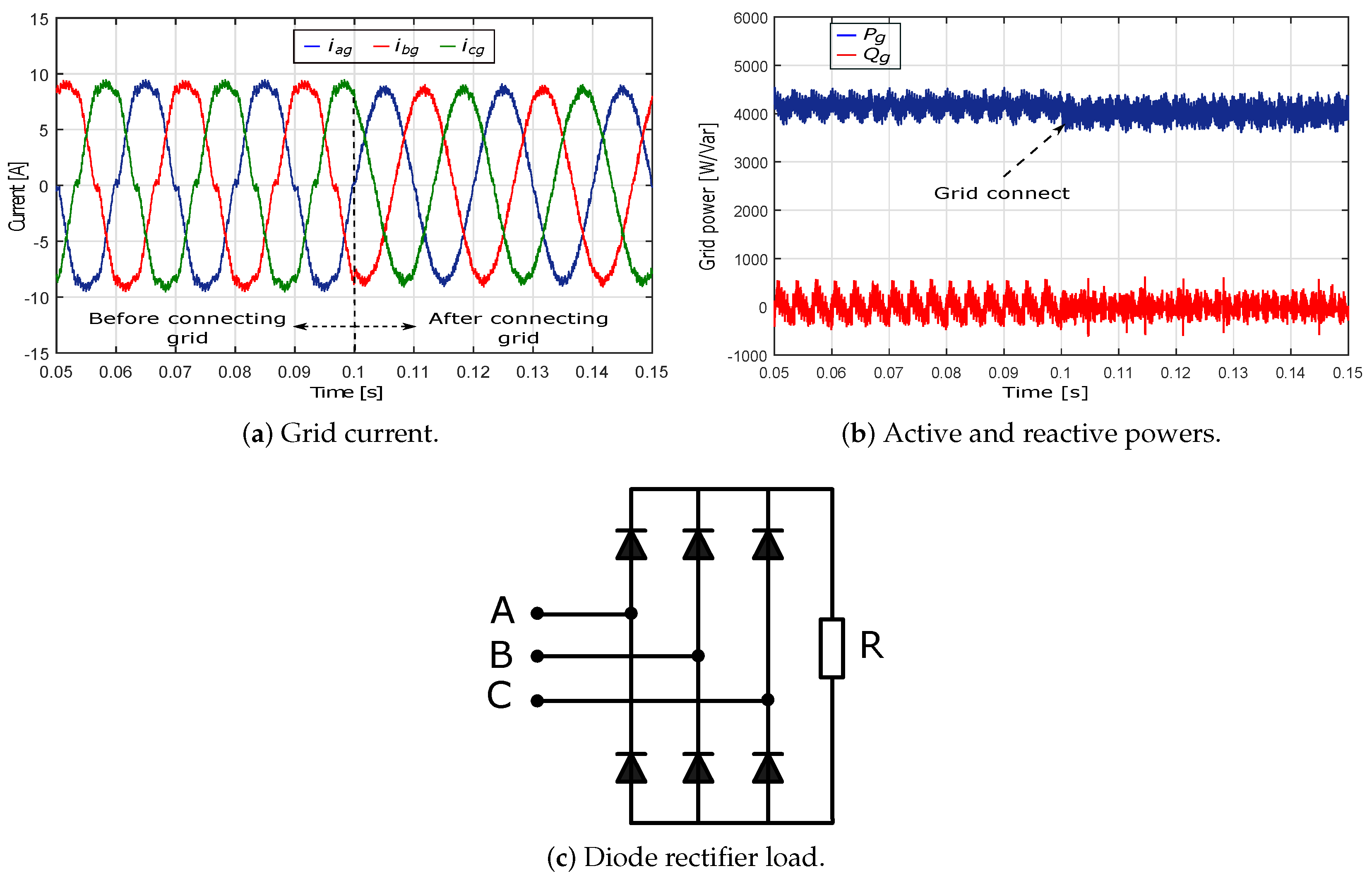
4.1. Simulation Results
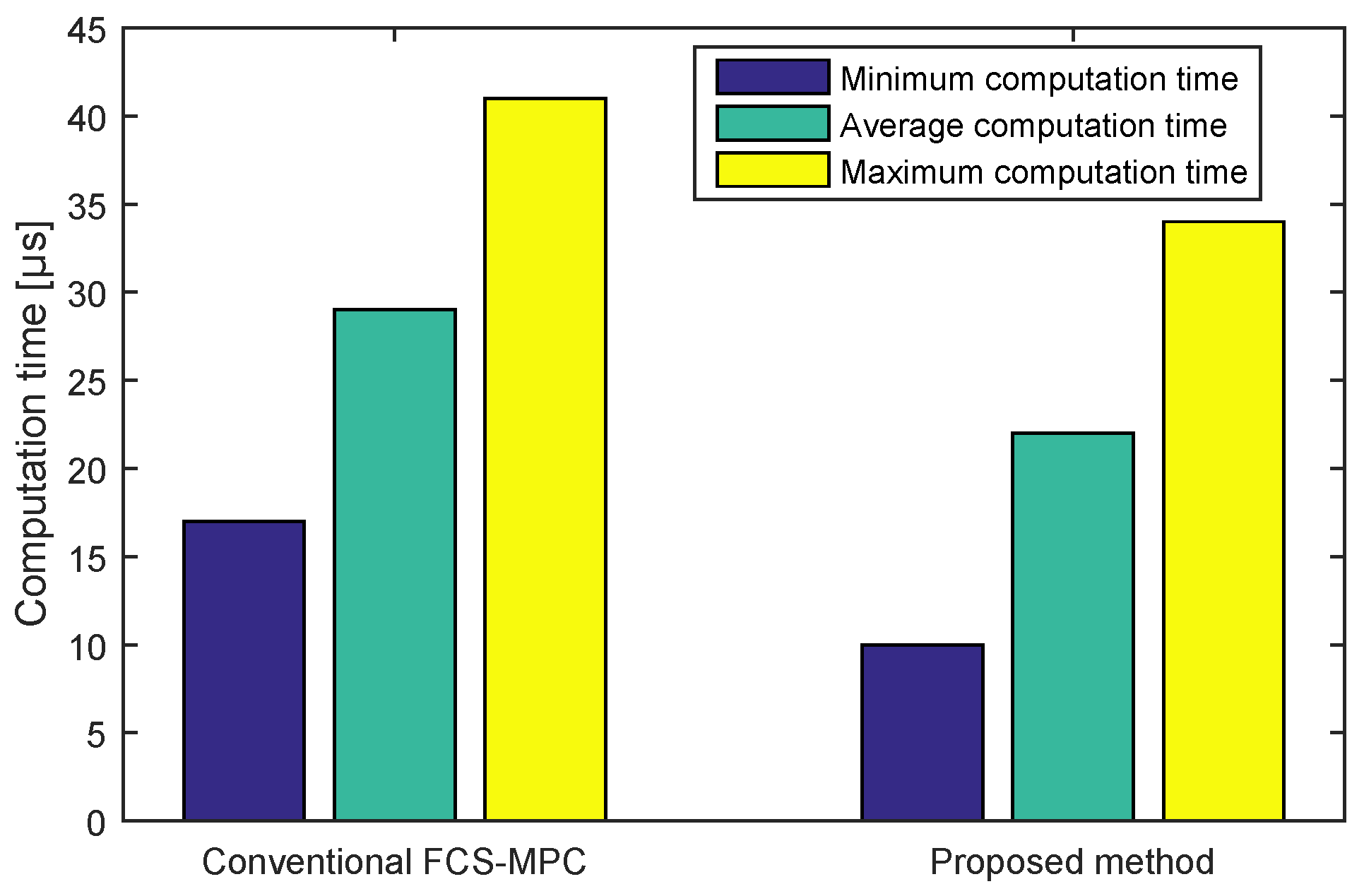
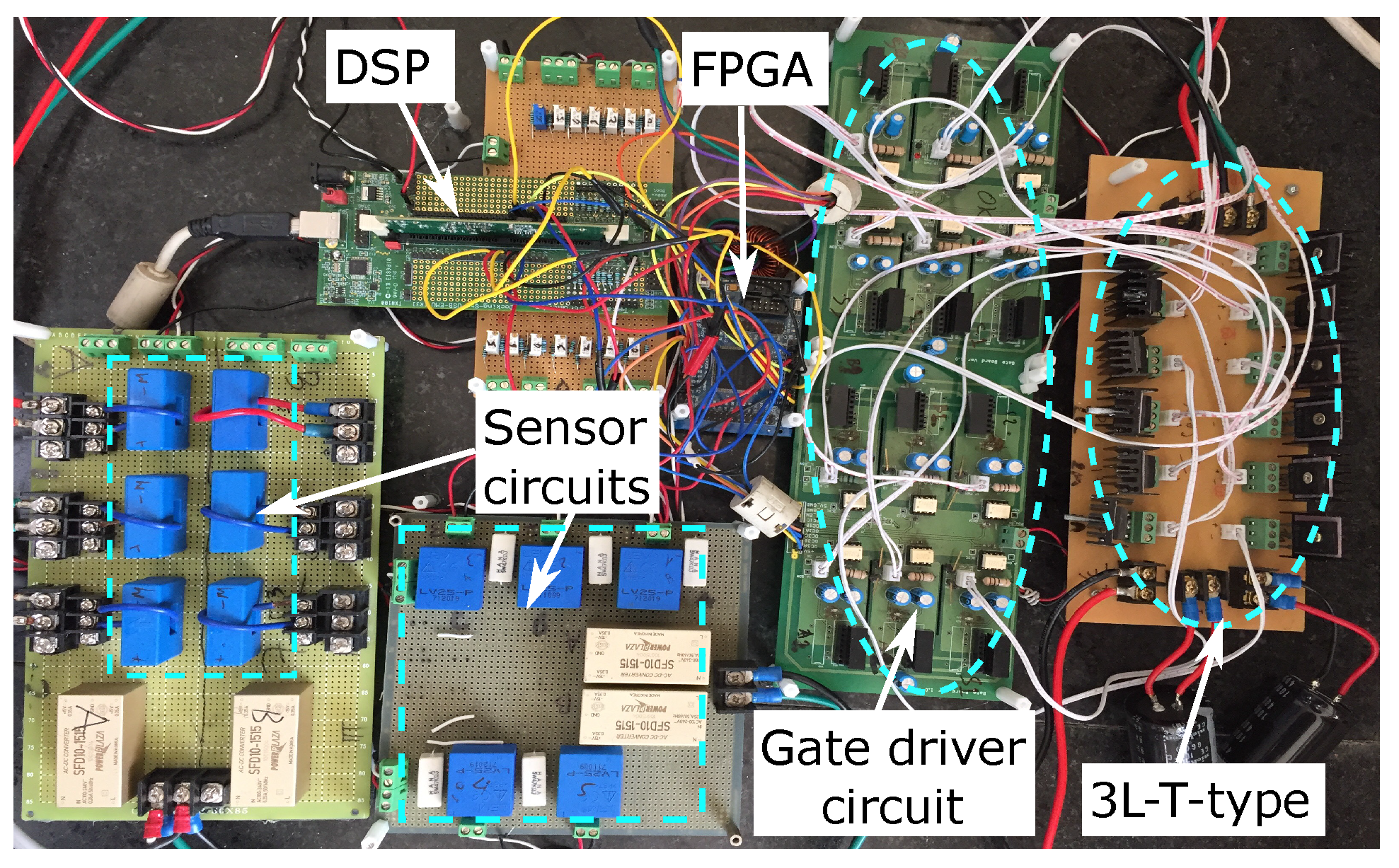
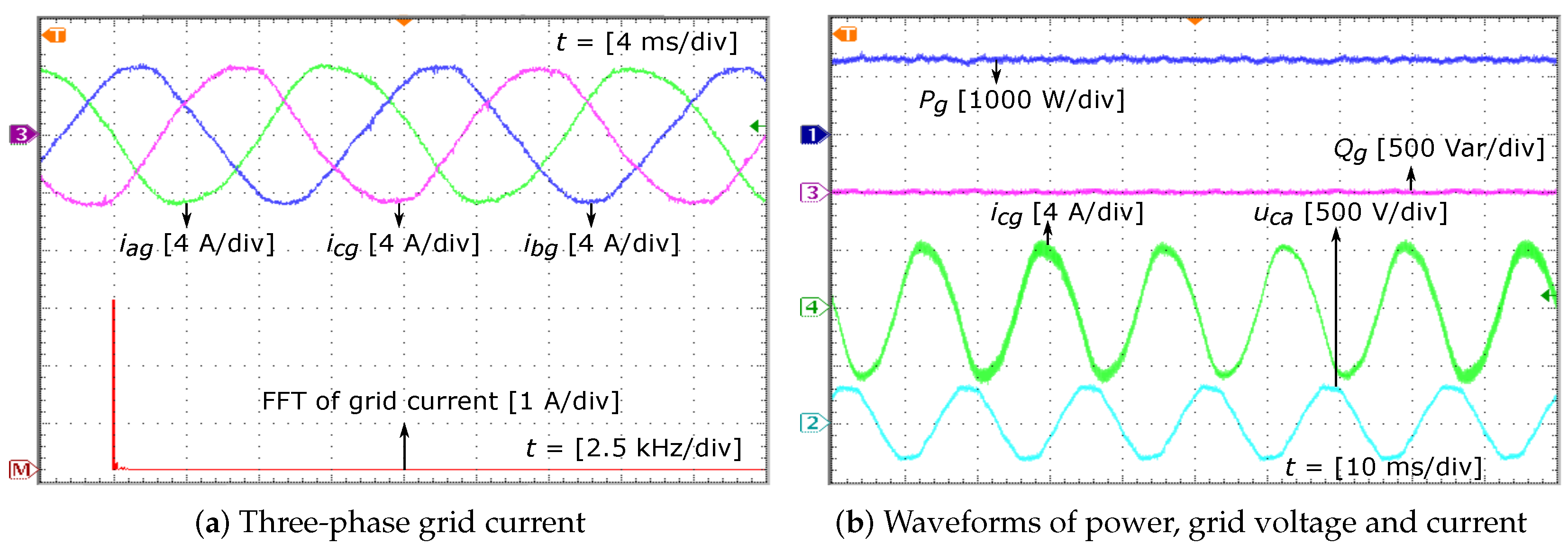
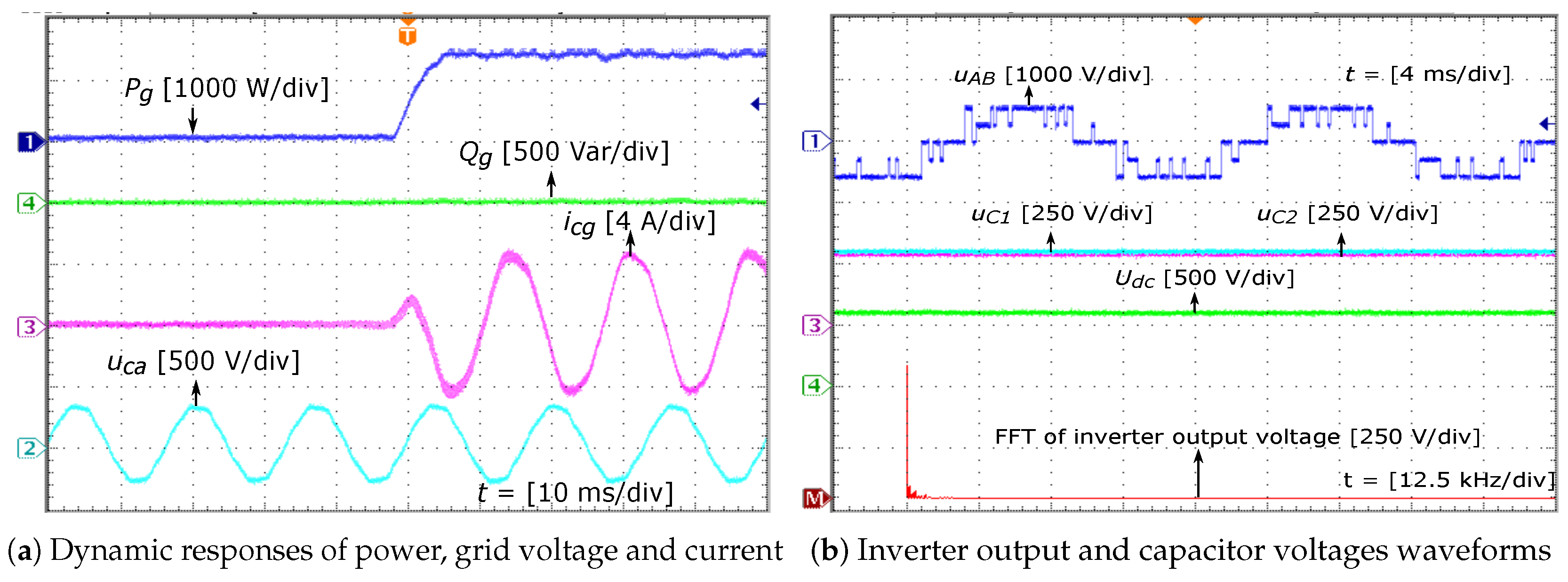
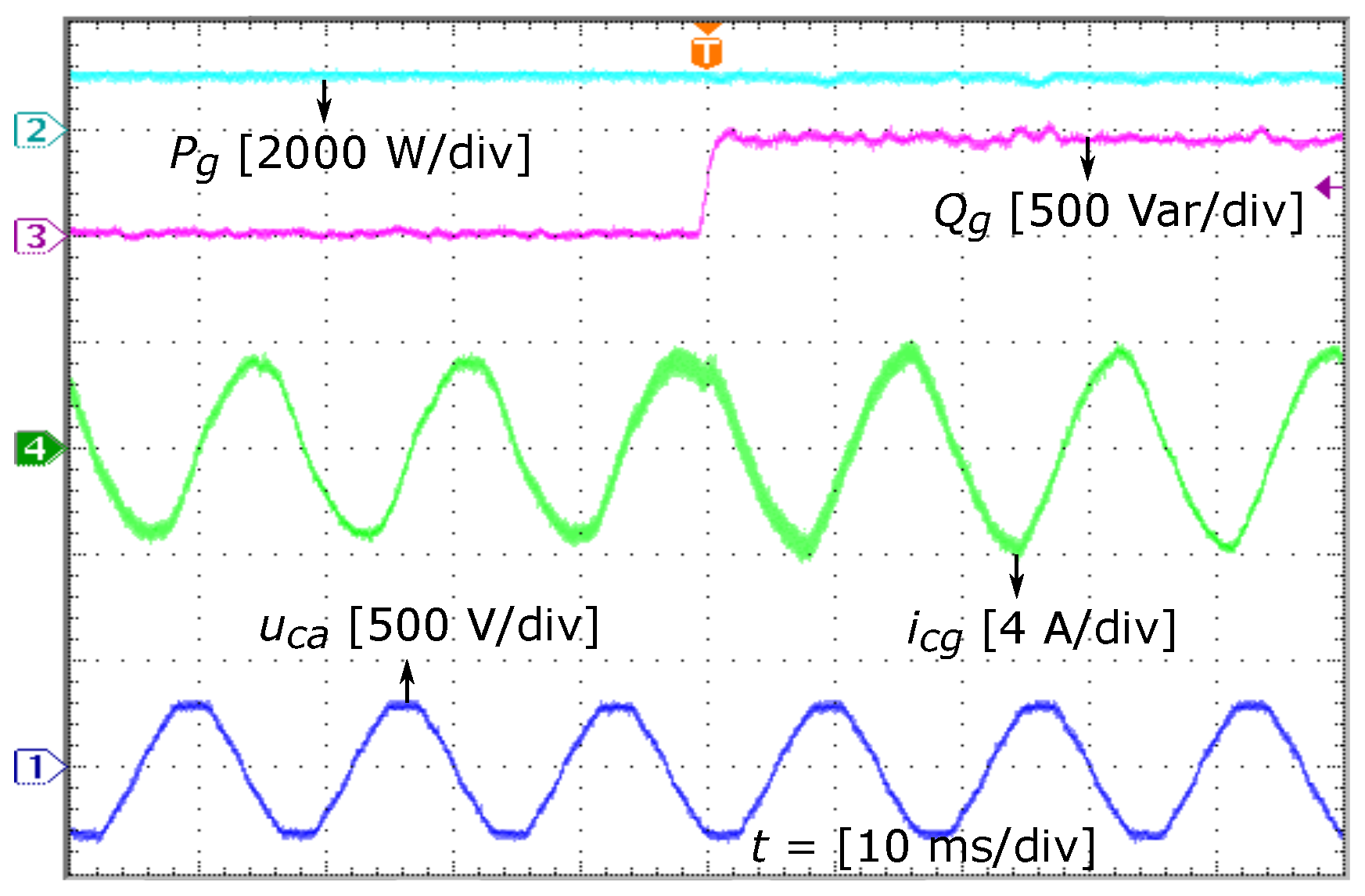
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| 3L-T-type | Three-level T-type |
| DC-bus capacitance | |
| DPC | Direct power control |
| DPC-SVM | Classical DPC with linear PI controllers and SVM |
| FCS-MPC | Finite control set model predictive control |
| Average switching frequency | |
| g | Cost function |
| Grid current | |
| Filter inductance | |
| MAPE | Mean absolute percentage error |
| Positive, negative and zero states | |
| Grid active power | |
| PLL | Phase-locked loop |
| PWM | Pulse width modulation |
| Grid reactive power | |
| Filter resistance | |
| SVM | Space vector modulation |
| Switching state | |
| Sampling time | |
| DC-bus voltage | |
| Grid voltage magnitude | |
| Grid voltage | |
| Inverter output voltage | |
| Neutral-point voltage | |
| Weighting factor of the balance of capacitor voltages | |
| Weighting factor of switching frequency |
References
- Blaabjerg, F.; Liserre, M.; Ma, K. Power Electronics Converters for Wind Turbine Systems. IEEE Trans. Ind. Appl. 2012, 48, 708–719. [Google Scholar] [CrossRef]
- Portillo, R.C.; Prats, M.M.; Leon, J.I.; Sanchez, J.A.; Carrasco, J.M.; Galvan, E.; Franquelo, L.G. Modeling Strategy for Back-to-Back Three-Level Converters Applied to High-Power Wind Turbines. IEEE Trans. Ind. Electron. 2006, 53, 1483–1491. [Google Scholar] [CrossRef]
- Kouro, S.; Malinowski, M.; Gopakumar, K.; Pou, J.; Franquelo, L.G.; Wu, B.; Rodriguez, J.; Perez, M.A.; Leon, J.I. Recent Advances and Industrial Applications of Multilevel Converters. IEEE Trans. Ind. Electron. 2010, 57, 2553–2580. [Google Scholar] [CrossRef]
- Schweizer, M.; Kolar, J.W. Design and Implementation of a Highly Efficient Three-Level T-Type Converter for Low-Voltage Applications. IEEE Trans. Power Electron. 2013, 28, 899–907. [Google Scholar] [CrossRef]
- Qin, C.; Zhang, C.; Chen, A.; Xing, X.; Zhang, G. A Space Vector Modulation Scheme of the Quasi-Z-Source Three-Level T-Type Inverter for Common-Mode Voltage Reduction. IEEE Trans. Ind. Electron. 2018, 65, 8340–8350. [Google Scholar] [CrossRef]
- Wu, B.; Narimani, M. High-Power Converters and AC Drives; Wiley-IEEE Press: Piscataway, NJ, USA, 2017. [Google Scholar]
- Ngo, B.Q.V.; Ayerbe, P.R.; Olaru, S. Model Predictive Control with Two-step horizon for Three-level Neutral-Point Clamped Inverter. In Proceedings of the 20th International Conference on Process Control, Strbske Pleso, Slovakia, 9–12 June 2015; pp. 215–220. [Google Scholar]
- Kang, J.W.; Hyun, S.W.; Ha, J.O.; Won, C.Y. Improved Neutral-Point Voltage-Shifting Strategy for Power Balancing in Cascaded NPC/H-Bridge Inverter. Electronics 2018, 7, 167. [Google Scholar] [CrossRef]
- Vahedi, H.; Labbe, P.A.; Al-Haddad, K. Balancing three-level NPC inverter DC bus using closed-loop SVM Real time implementation and investigation. IET Power Electron. 2016, 9, 2076–2084. [Google Scholar] [CrossRef]
- In, H.C.; Kim, S.M.; Lee, K.B. Design and Control of Small DC-Link Capacitor-Based Three-Level Inverter with Neutral-Point Voltage Balancing. Energies 2018, 11, 1435. [Google Scholar] [CrossRef]
- Wilamowski, B.M.; Irwin, J.D. Power Electronics and Motor Drives; Taylor and Francis Group: Oxfordshire, UK, 2011. [Google Scholar]
- Gui, Y.; Lee, G.H.; Kim, C.; Chung, C.C. Direct power control of grid connected voltage source inverters using port-controlled Hamiltonian system. Int. J. Control Autom. Syst. 2017, 15, 2053–2062. [Google Scholar] [CrossRef]
- Zorig, A.; Belkheiri, M.; Barkat, S. Control of three-level T-type inverter based grid connected PV system. In Proceedings of the 13th International Multi-Conference on Systems, Signals & Devices, Leipzig, Germany, 21–24 March 2016; pp. 66–71. [Google Scholar]
- Hernández, J.C.; Sanchez-Sutil, F.; Vidal, P.G.; Rus-Casas, C. Primary frequency control and dynamic grid support for vehicle-to-grid in transmission systems. Int. J. Electr. Power Energy Syst. 2018, 100, 152–166. [Google Scholar] [CrossRef]
- Hernandez, J.C.; Bueno, P.G.; Sanchez-Sutil, F. Enhanced utility-scale photovoltaic units with frequency support functions and dynamic grid support for transmission systems. IET Renew. Power Gener. 2017, 11, 361–372. [Google Scholar] [CrossRef]
- Bueno, P.G.; Hernández, J.C.; Ruiz-Rodriguez, F.J. Stability assessment for transmission systems with large utility-scale photovoltaic units. IET Renew. Power Gener. 2016, 10, 584–597. [Google Scholar] [CrossRef]
- Malinowski, M.; Kazmierkowski, M.P.; Hansen, S.; Blaabjerg, F.; Marques, G.D. Virtual-flux-based direct power control of three-phase PWM rectifiers. IEEE Trans. Ind. Appl. 2001, 37, 1019–1027. [Google Scholar] [CrossRef]
- Song, Z.; Tian, Y.; Yan, Z.; Chen, Z. Direct Power Control for Three-Phase Two-Level Voltage-Source Rectifiers Based on Extended-State Observation. IEEE Trans. Ind. Electron. 2016, 63, 4593–4603. [Google Scholar] [CrossRef]
- Sebaaly, F.; Vahedi, H.; Kanaan, H.Y.; Moubayed, N.; Al-Haddad, K. Design and Implementation of Space Vector Modulation-Based Sliding Mode Control for Grid-Connected 3L-NPC Inverter. IEEE Trans. Ind. Electron. 2016, 63, 7854–7863. [Google Scholar] [CrossRef]
- Scoltock, J.; Geyer, T.; Madawala, U.K. Model Predictive Direct Power Control for Grid-Connected NPC Converters. IEEE Trans. Ind. Electron. 2015, 62, 5319–5328. [Google Scholar] [CrossRef]
- Vazquez, S.; Marquez, A.; Aguilera, R.; Quevedo, D.; Leon, J.I.; Franquelo, L.G. Predictive Optimal Switching Sequence Direct Power Control for Grid-Connected Power Converters. IEEE Trans. Ind. Electron. 2015, 62, 2010–2020. [Google Scholar] [CrossRef]
- Ngo, V.Q.B.; Nguyen, M.K.; Tran, T.T.; Lim, Y.C.; Choi, J.H. A Simplified Model Predictive Control for T-Type Inverter with Output LC Filter. Energies 2019, 12, 31. [Google Scholar] [CrossRef]
- Donoso, F.; Mora, A.; Cárdenas, R.; Angulo, A.; Sáez, D.; Rivera, M. Finite-Set Model-Predictive Control Strategies for a 3L-NPC Inverter Operating With Fixed Switching Frequency. IEEE Trans. Ind. Electron. 2018, 65, 3954–3965. [Google Scholar] [CrossRef]
- Ngo, B.Q.V.; Rodriguez-Ayerbe, P.; Olaru, S.; Niculescu, S.I. Model predictive power control based on virtual flux for grid connected three-level neutral-point clamped inverter. In Proceedings of the 18th European Conference on Power Electronics and Applications, Karlsruhe, Germany, 5–9 September 2016; pp. 1–10. [Google Scholar]
- Kouro, S.; Cortes, P.; Vargas, R.; Ammann, U.; Rodriguez, J. Model Predictive Control: A Simple and Powerful Method to Control Power Converters. IEEE Trans. Ind. Electron. 2009, 56, 1826–1838. [Google Scholar] [CrossRef]
- Rodriguez, J.; Kazmierkowski, M.P.; Espinoza, J.R.; Zanchetta, P.; Abu-Rub, H.; Young, H.A.; Rojas, C.A. State of the Art of Finite Control Set Model Predictive Control in Power Electronics. IEEE Trans. Ind. Inform. 2013, 9, 1003–1016. [Google Scholar] [CrossRef]
- Rodriguez, J.; Cortes, P. Predictive Control of Power Converters and Electrical Drives; John Wiley & Sons, Inc.: New York, NY, USA, 2012. [Google Scholar]
- Shi, T.; Zhang, C.; Geng, Q.; Xia, C. Improved model predictive control of three-level voltage source converter. Electr. Power Compon. Syst. 2014, 42, 1029–1138. [Google Scholar] [CrossRef]
- Geyer, T.; Quevedo, D.E. Performance of Multistep Finite Control Set Model Predictive Control for Power Electronics. IEEE Trans. Power Electron. 2015, 30, 1633–1644. [Google Scholar] [CrossRef]
- Aguilera, R.P.; Baidya, R.; Acuna, P.; Vazquez, S.; Mouton, T.; Agelidis, V.G. Model predictive control of cascaded H-bridge inverters based on a fast-optimization algorithm. In Proceedings of the 41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 4003–4008. [Google Scholar]
- Xia, C.; Liu, T.; Shi, T.; Song, Z. A Simplified Finite-Control-Set Model-Predictive Control for Power Converters. IEEE Trans. Ind. Inform. 2014, 10, 991–1002. [Google Scholar]
- Taheri, A.; Zhalebaghi, M.H. A new model predictive control algorithm by reducing the computing time of cost function minimization for NPC inverter in three-phase power grids. ISA Trans. 2017, 71, 391–402. [Google Scholar] [CrossRef] [PubMed]
- Cortes, P.; Kouro, S.; Rocca, B.L.; Vargas, R.; Rodriguez, J.; Leon, J.I.; Vazquez, S.; Franquelo, L.G. Guidelines for weighting factors design in Model Predictive Control of power converters and drives. In Proceedings of the 2009 IEEE International Conference on Industrial Technology, Gippsland, VIC, Australia, 10–13 February 2009; pp. 1–7. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Switching State | Switches | One Phase Inverter Voltage | |||
|---|---|---|---|---|---|
| N | 0 | 0 | 1 | 1 | |
| O | 0 | 1 | 1 | 0 | 0 |
| P | 1 | 1 | 0 | 0 | |
| Variables | Conventional FCS-MPC | Proposed Method |
|---|---|---|
| , | 1 | 1 |
| , | 27 | 27 |
| , | 27 | 0 |
| , | 0 | 1 |
| 27 | 27 | |
| 27 | 27 | |
| Total | 109 | 83 |
| System Parameters | Value | Representation |
|---|---|---|
| 600 [V] | DC-bus voltage | |
| 1000 [F] | DC-bus capacitance | |
| 80 [m] | Filter resistance | |
| 10 [mH] | Filter inductance | |
| 20 [kHz] | Sampling frequency of the proposed controller | |
| 50 [Hz] | Grid voltage frequency | |
| 380 [V] | Grid line-to-line voltage | |
| 20 | Weighting factor of the balance of capacitor voltages | |
| 60 | Weighting factor of switching frequency |
| Active Power Step | = 4 → 7.5 (kW) | ||
|---|---|---|---|
| DPC-SVM | Conventional FCS-MPC | Proposed Method | |
| Rise time (ms) | 1.1 | 0.8 | 0.8 |
| Settling time (ms) | 4.8 | 0.8 | 0.8 |
| Overshoot (%) | 5.3 | 0 | 0 |
| THD of grid current (%) | 3.2 | 2.51 | 2.5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ngo, V.-Q.-B.; Nguyen, M.-K.; Tran, T.-T.; Choi, J.-H.; Lim, Y.-C. A Modified Model Predictive Power Control for Grid-Connected T-Type Inverter with Reduced Computational Complexity. Electronics 2019, 8, 217. https://doi.org/10.3390/electronics8020217
Ngo V-Q-B, Nguyen M-K, Tran T-T, Choi J-H, Lim Y-C. A Modified Model Predictive Power Control for Grid-Connected T-Type Inverter with Reduced Computational Complexity. Electronics. 2019; 8(2):217. https://doi.org/10.3390/electronics8020217
Chicago/Turabian StyleNgo, Van-Quang-Binh, Minh-Khai Nguyen, Tan-Tai Tran, Joon-Ho Choi, and Young-Cheol Lim. 2019. "A Modified Model Predictive Power Control for Grid-Connected T-Type Inverter with Reduced Computational Complexity" Electronics 8, no. 2: 217. https://doi.org/10.3390/electronics8020217