Analysis, Design, and Experimental Validation of a Primary Side Current-Sensing Flyback Converter for Use in a Battery Management System


Abstract
:1. Introduction
2. Analysis
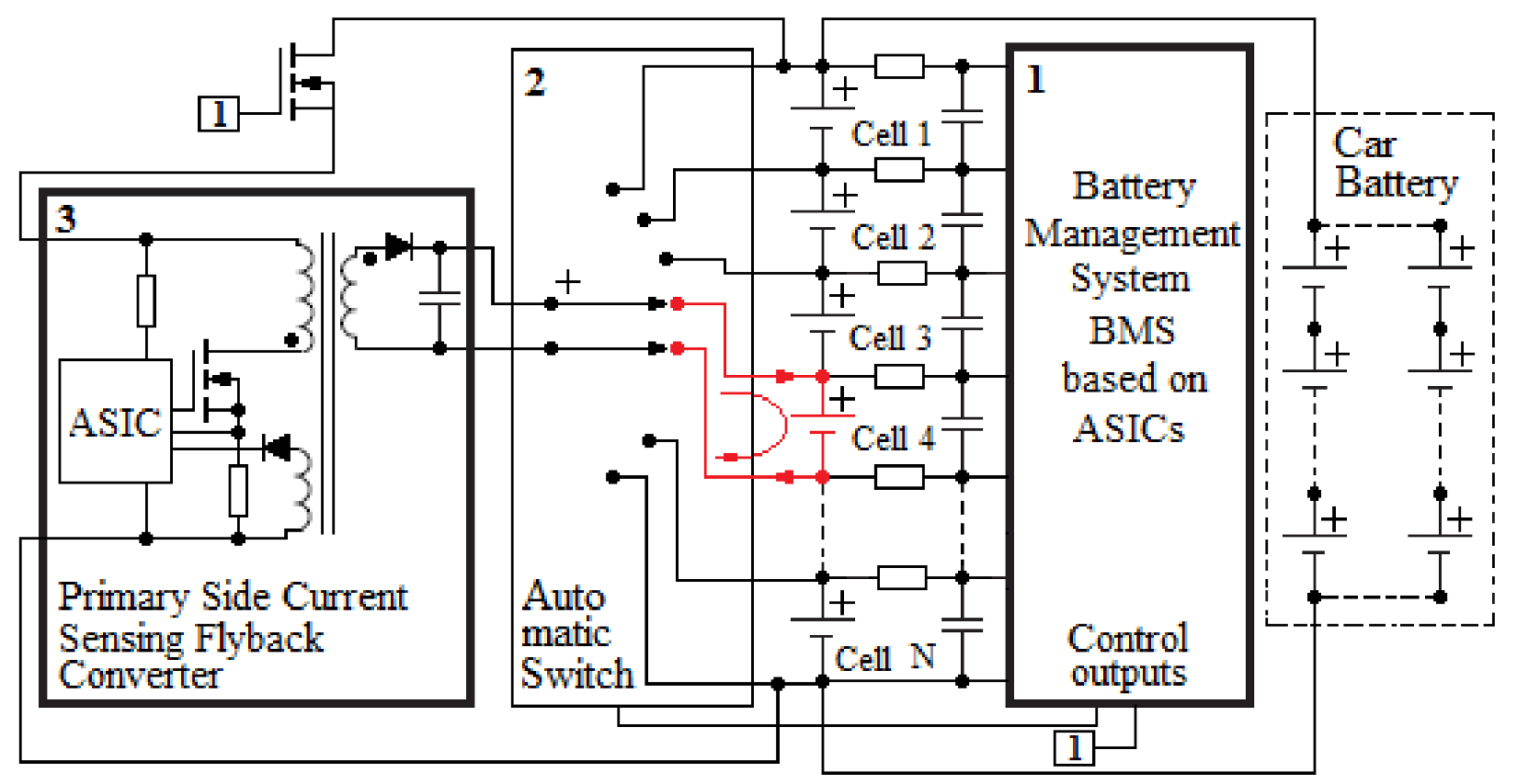
- The Battery Management System can be based on one of the ASICs LTC6802-2, MAX1894, MAX11068, MAX11080, DS2726, BQ29330, AD7280, and ATA6870 [22,23,24]. This system monitors the overall battery voltage and controls the automatic switch (2) and the flyback converter (3). The BMS is not the object of research in this paper.
- The automatic switch system. This provides mechanical switching between the cells of the battery, and is also not the object of research in this paper.
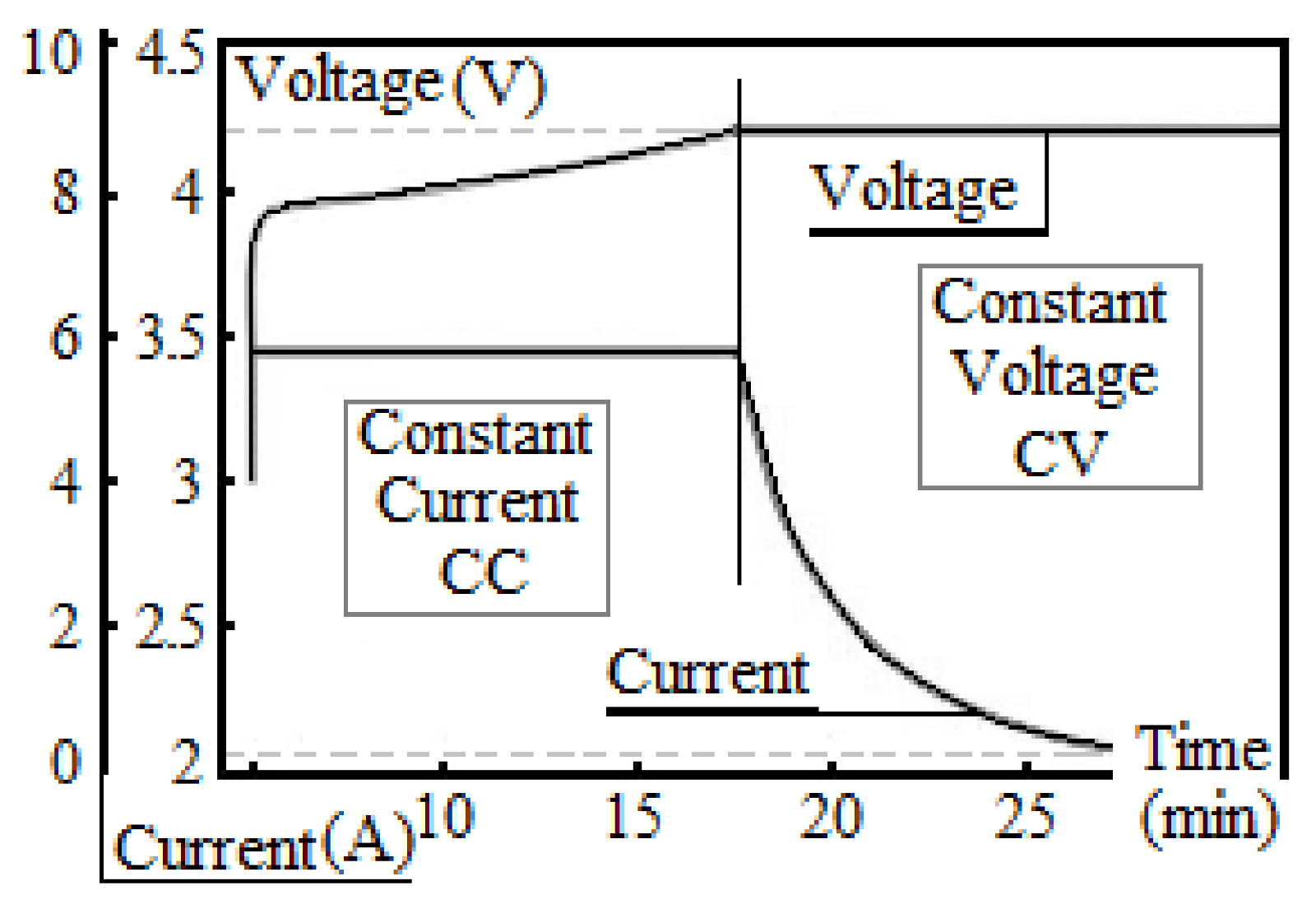
- Primary side current flyback converter. The schematic is based on ASICs, for example AP3706, FAN104W, FL103, or MP020-5 [16,17,19,20]. This converter is used for the charging of a single cell (within a series string within a battery pack) if its voltage is lower than that of the other cells in the string. The charging process is conducted according to the CC (constant current) and CV (constant voltage) procedure shown in Figure 2.
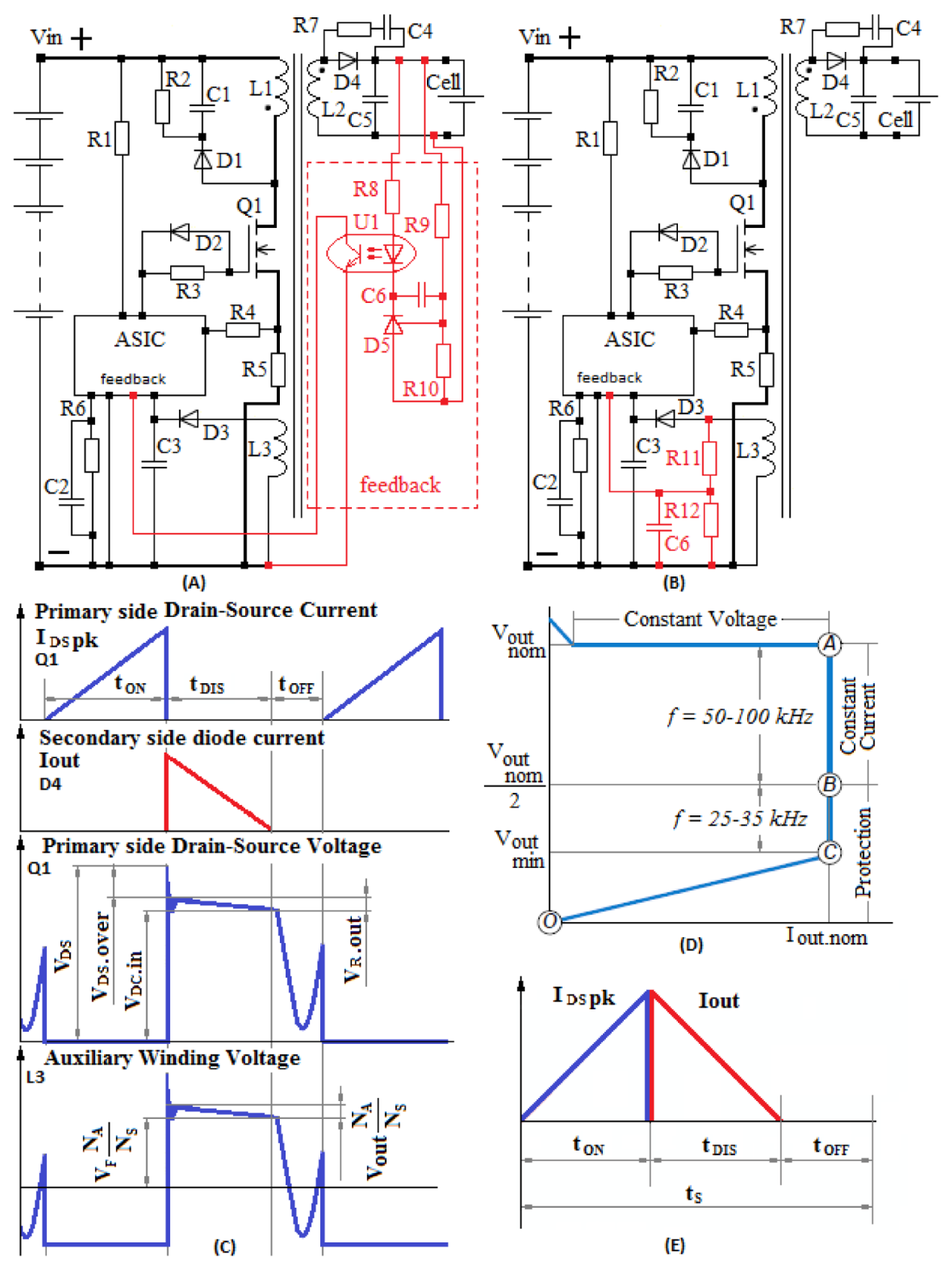
- Time : the input voltage is applied across the primary side of the transformer (, Figure 3B), which increases the primary side current from zero to the peak value ().
- Time : the primary side transistor () is turned off and the rectifier on the secondary side () is turned on. The secondary side current decreases linearly to zero. At its zero point, the accumulated energy in the transformer is depleted.
- The time : the primary side voltage across and the voltage across begins to oscillate on the resonance frequency between the primary side inductance and the parasitic output capacitor.
3. Design Procedure
3.1. Input Parameters
3.2. Estimation of the Efficiency
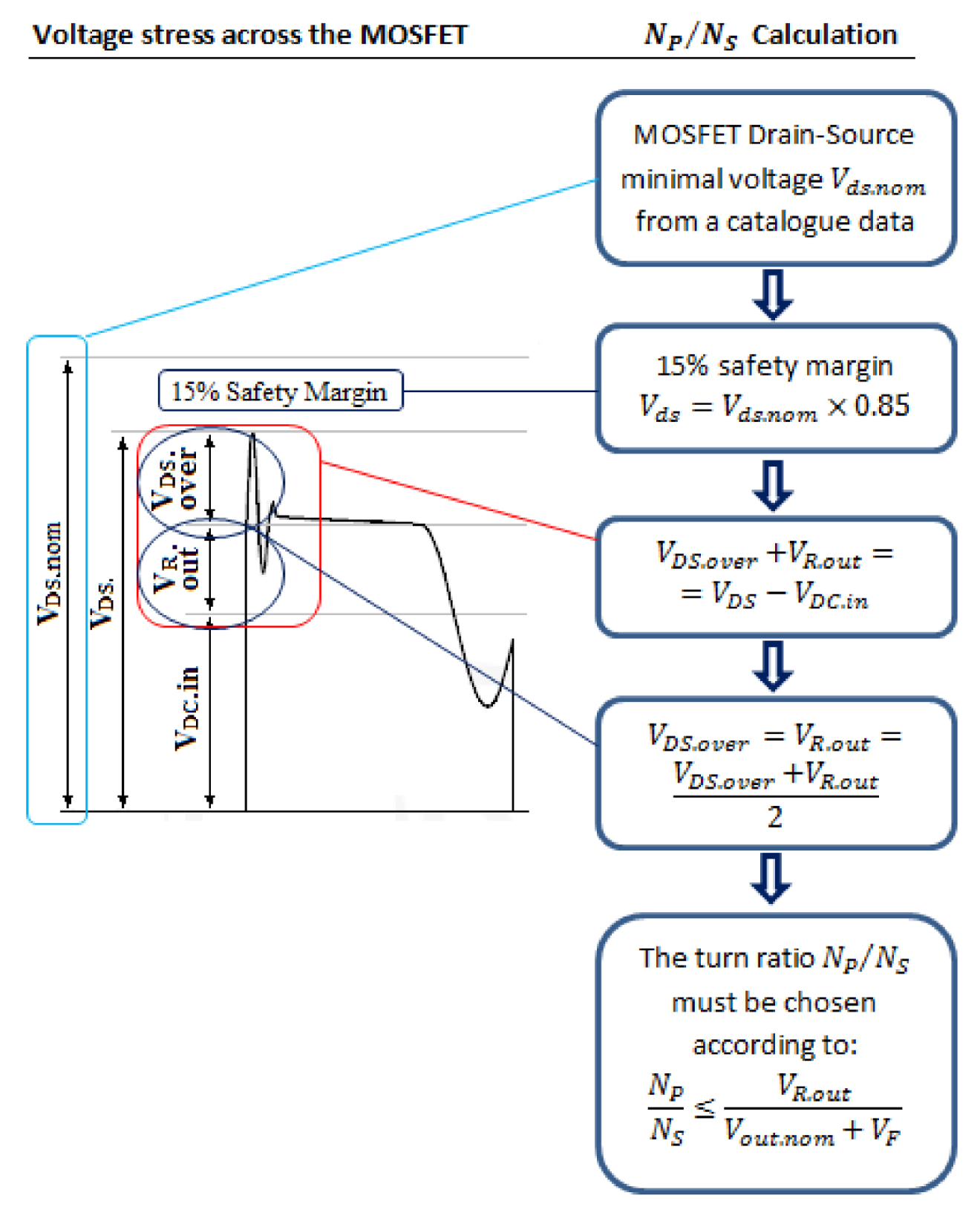
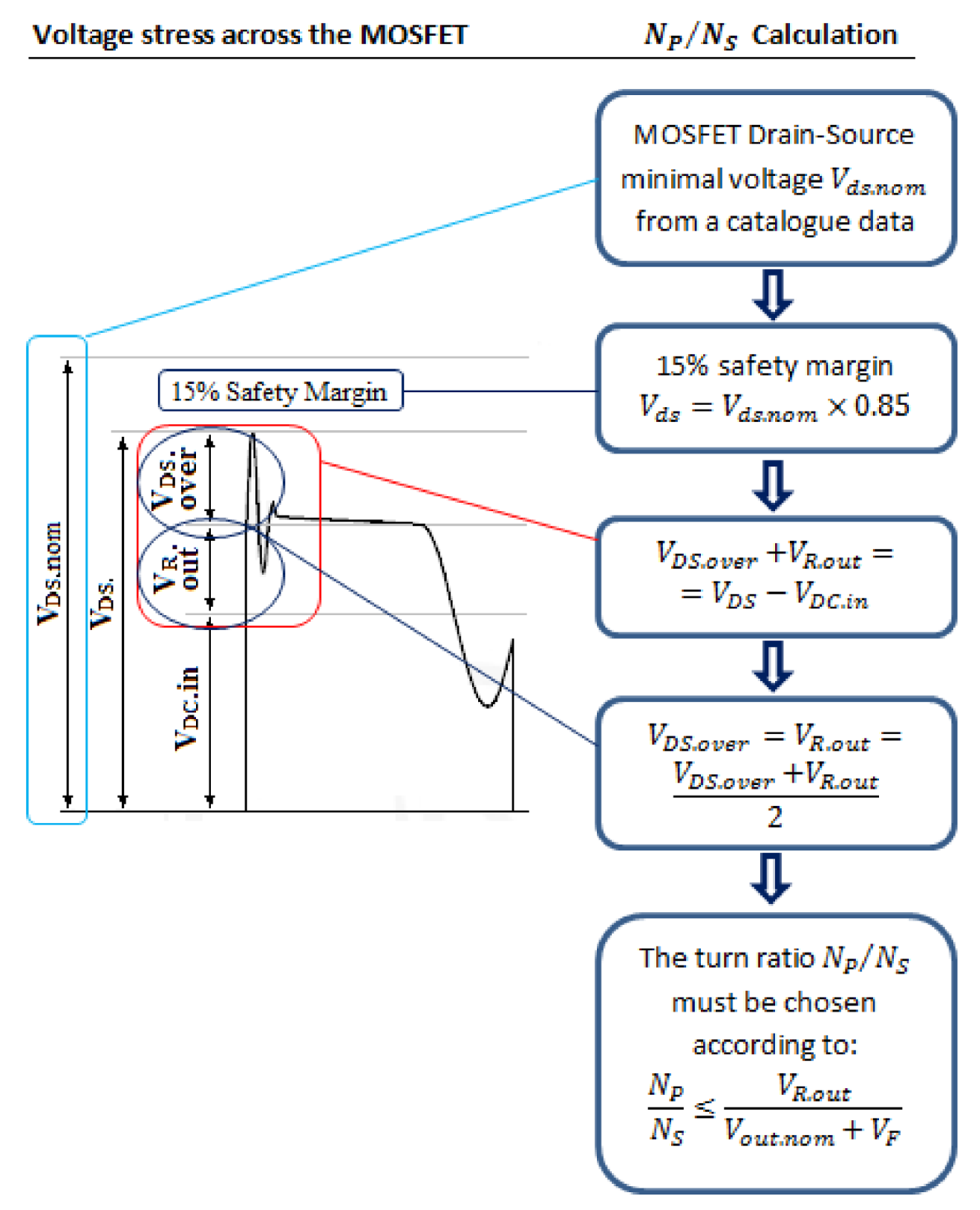
3.3. Determination of the Transformer Turns Ratio
3.4. Design of the Transformer
3.5. Current Sense Resistor
3.6. Calculating the Parameters of the Primary Side MOSFET Transistor
3.7. Calculating the Parameters of the Secondary Side Rectifier
3.8. Design of the Clamping Systems
3.9. Design of the Output Filter
3.10. Design of the RC Snubber
4. Experimental Results
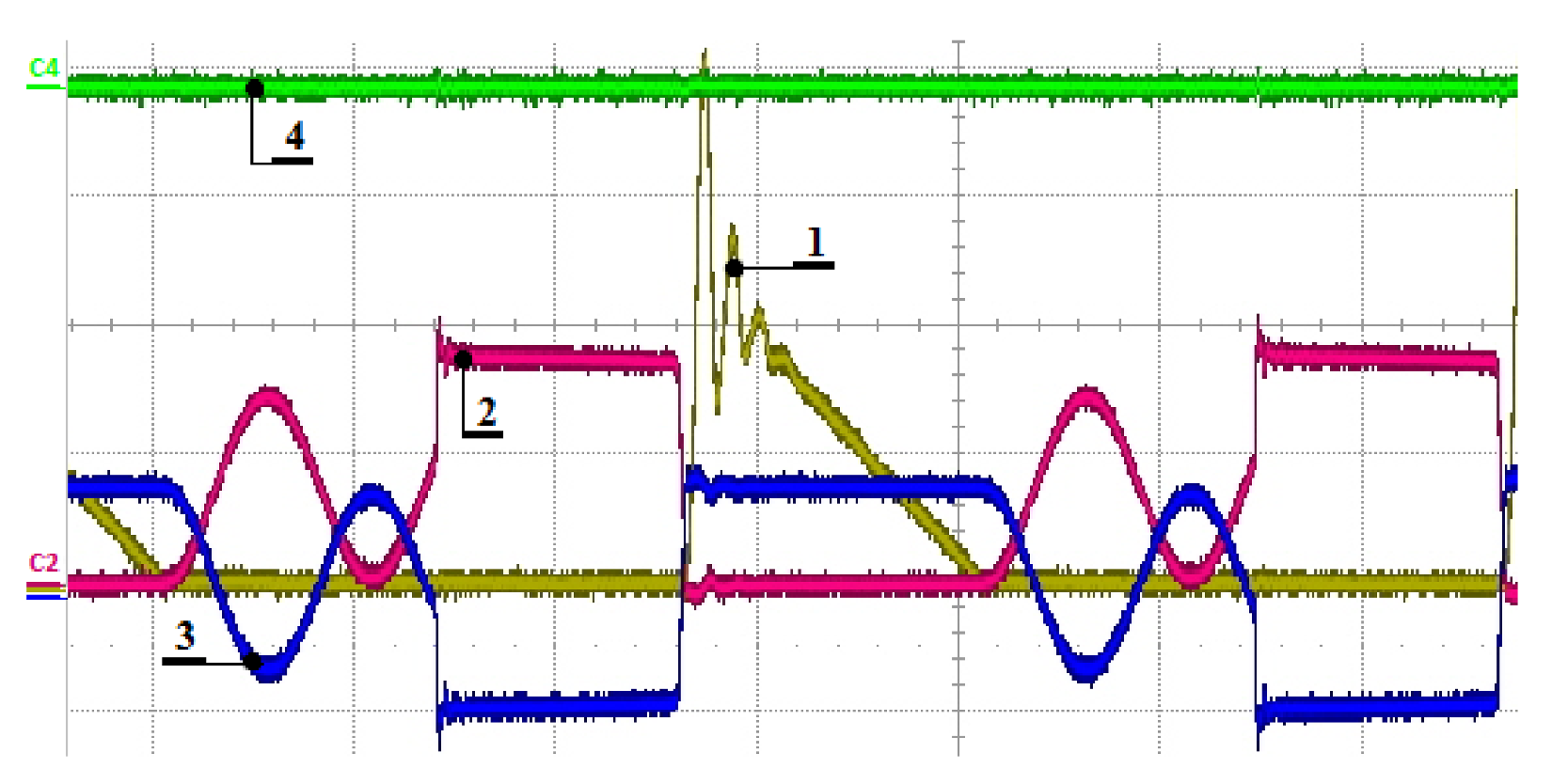
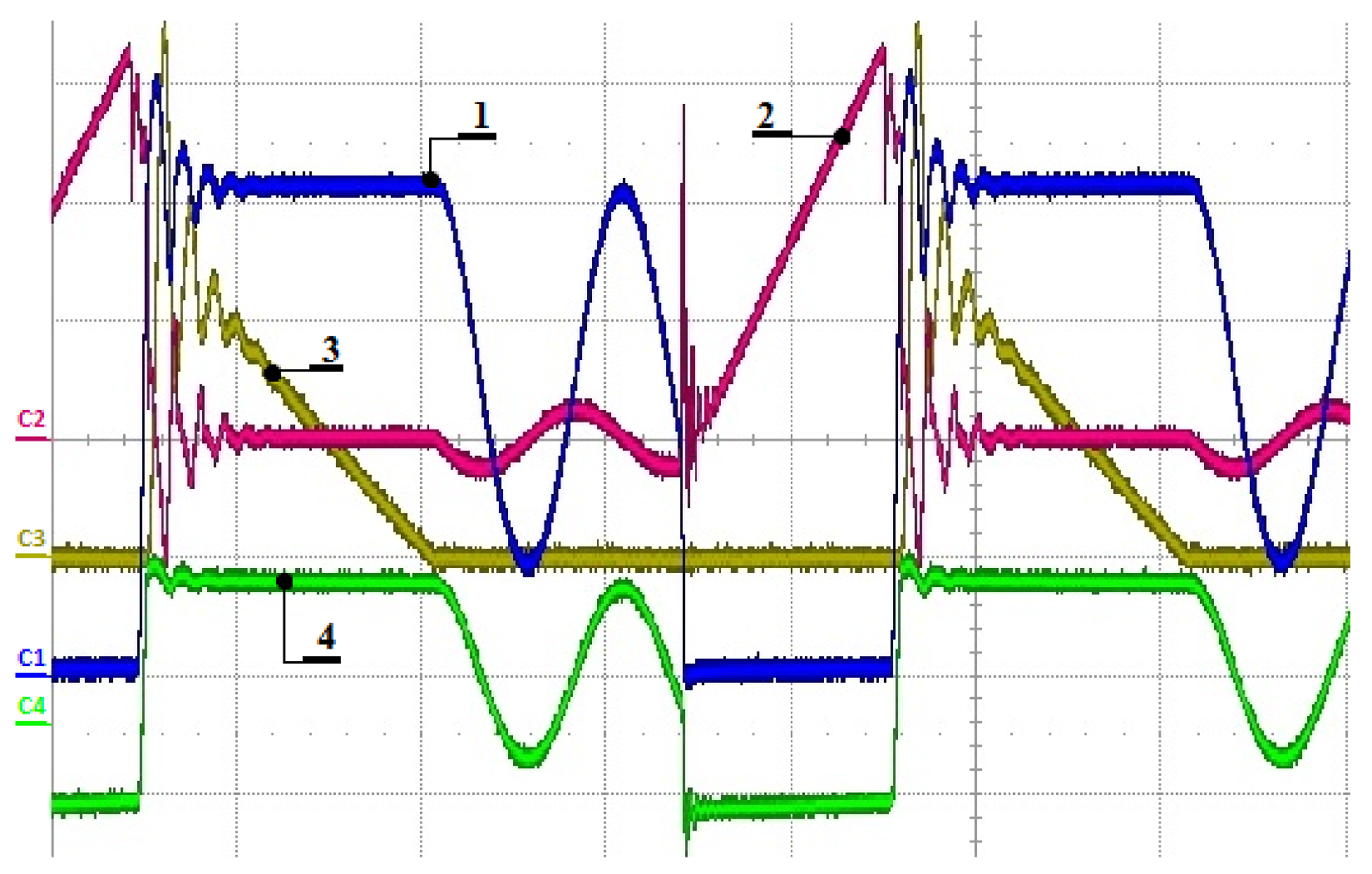
- Figure 5. The oscillogram shows the primary side of the converter, where: (1) is the voltage Drain-Source, , across the MOSFET with specific oscillation after full energy transfer; (2) is the primary side current, , through , , and ; (3) is the secondary side current through the rectifier, which represents the energy transfer at the zero point; and (4) is the voltage on the auxiliary winding, which repeats the shape of (1) but with a smaller amplitude.
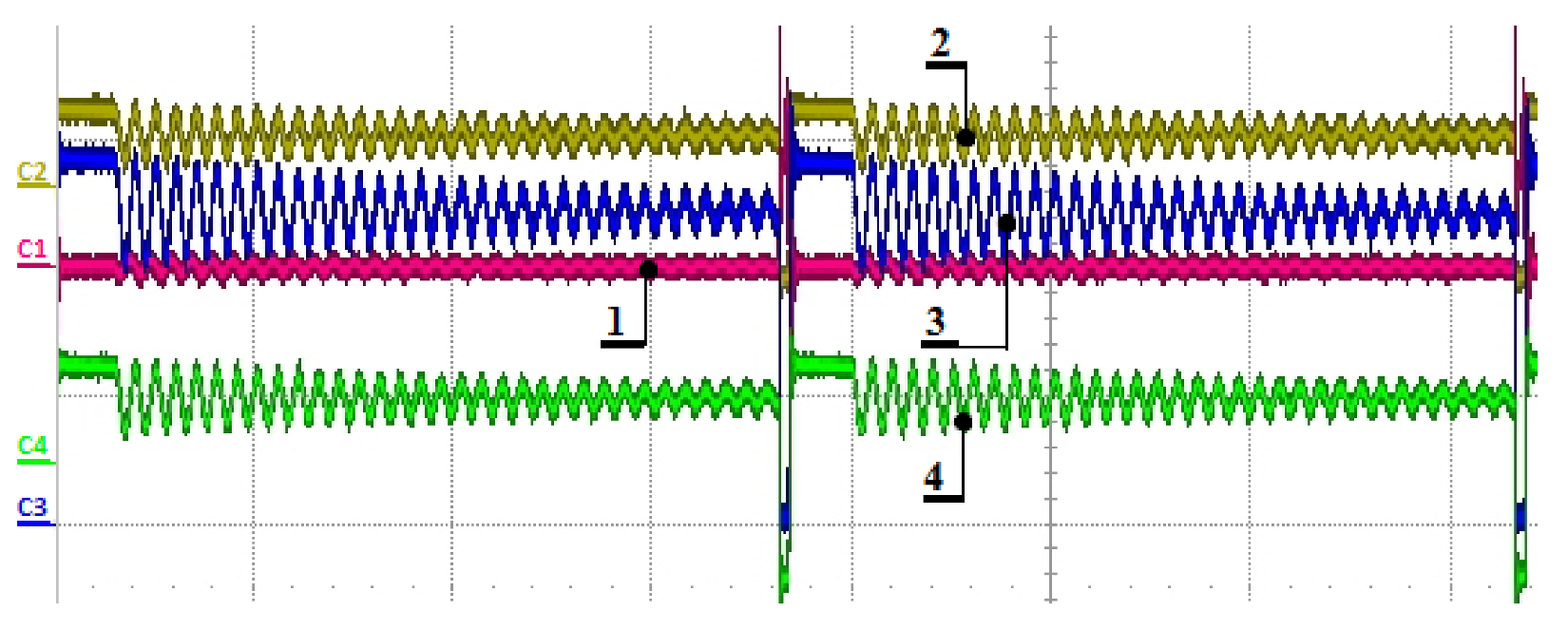
- Figure 6 shows the secondary side of the converter, where (1) and (2) are the secondary side current and voltage, respectively, over ; (3) is the voltage on the auxiliary winding; and (4) is the output voltage.
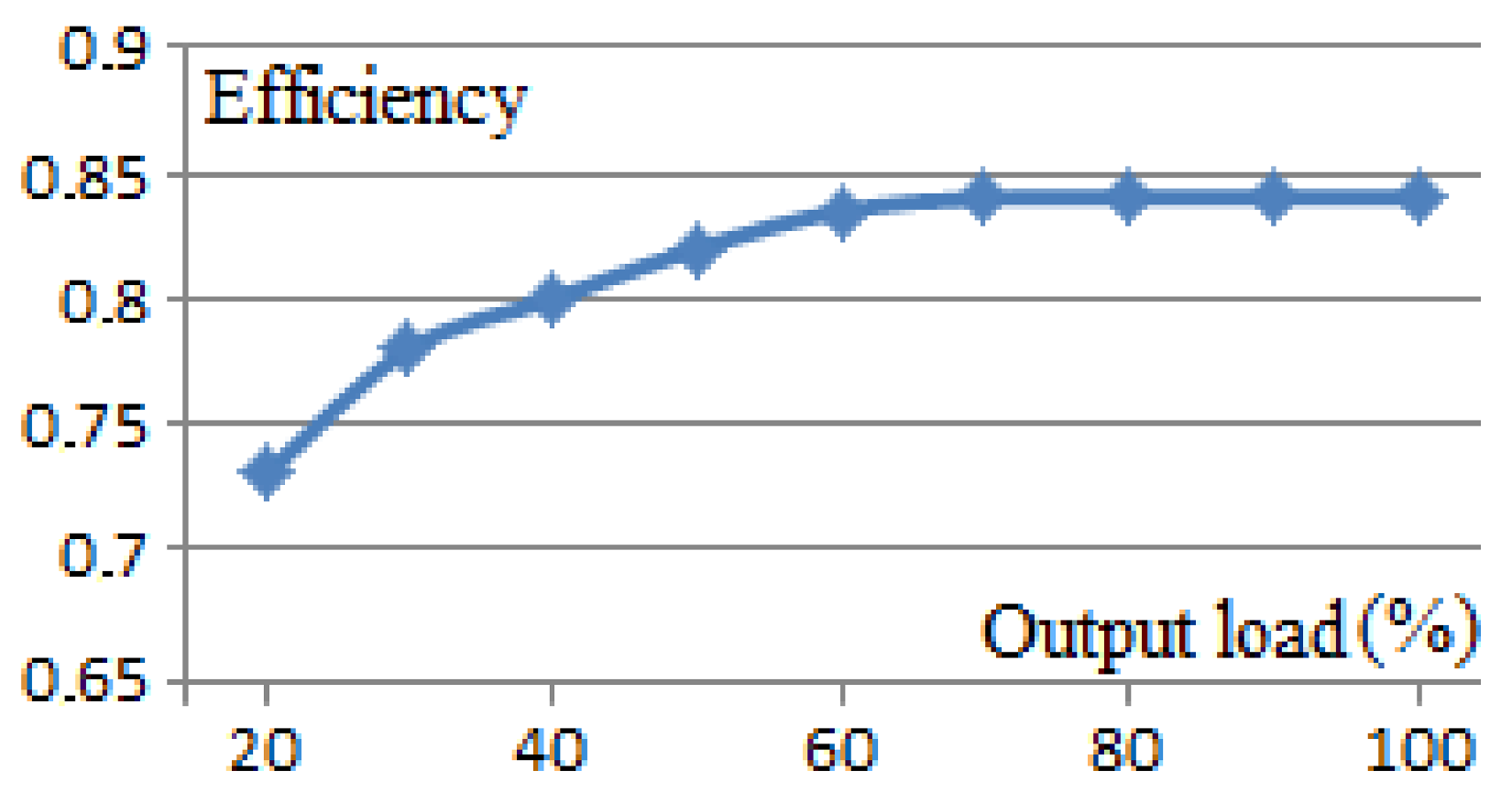
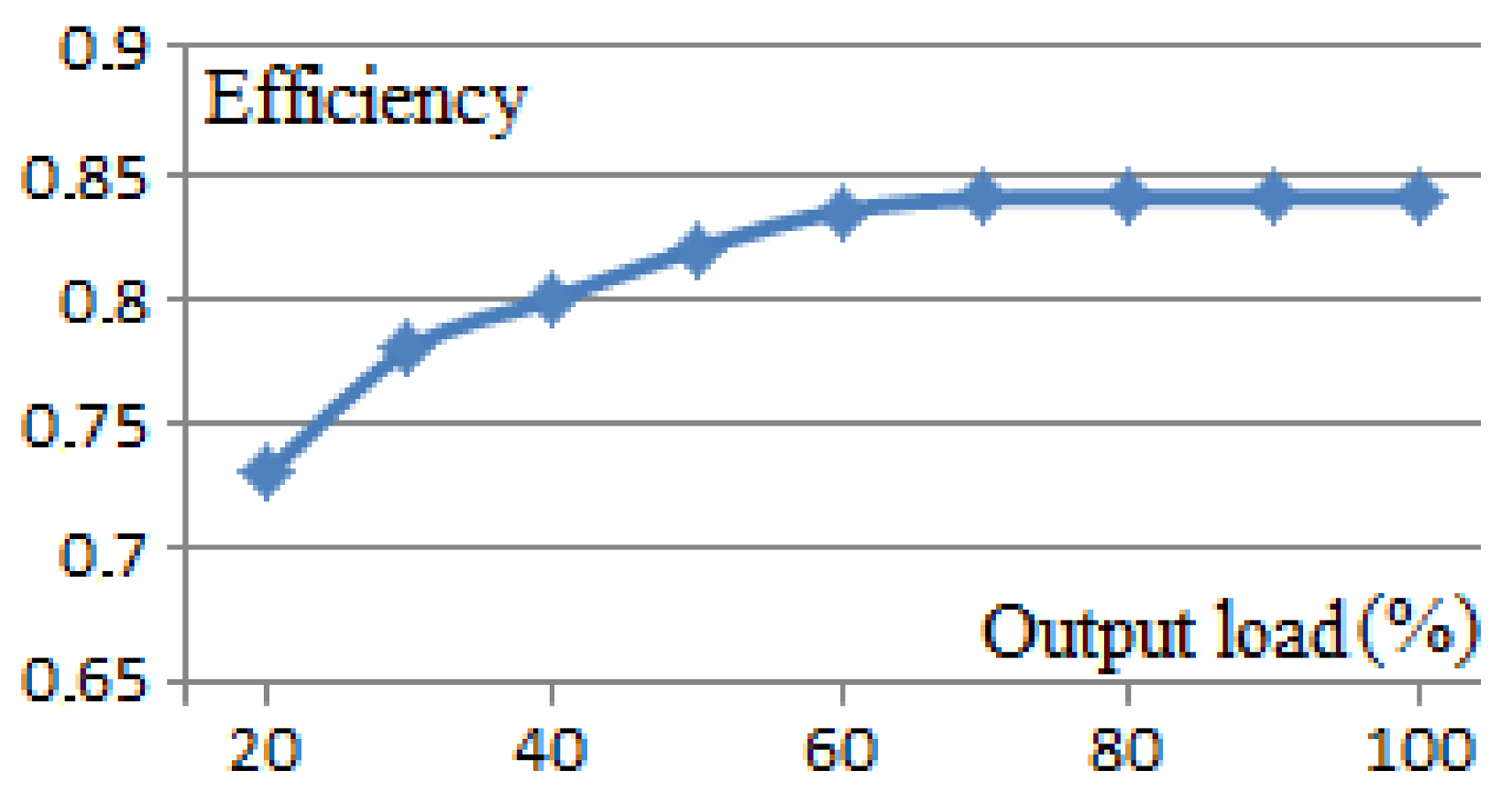
- The maximum obtained efficiency of the converter is 84% as shown in Figure 8.
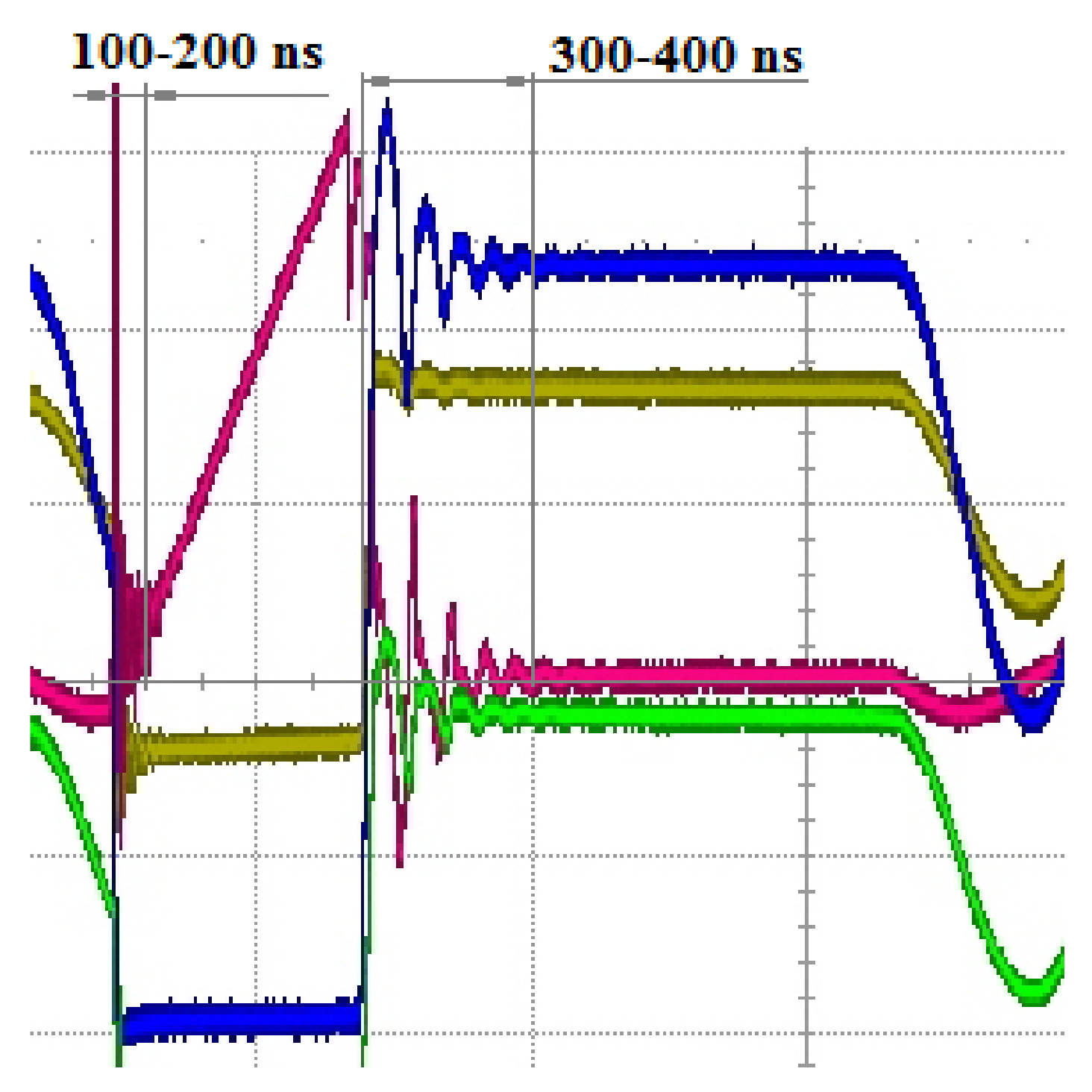
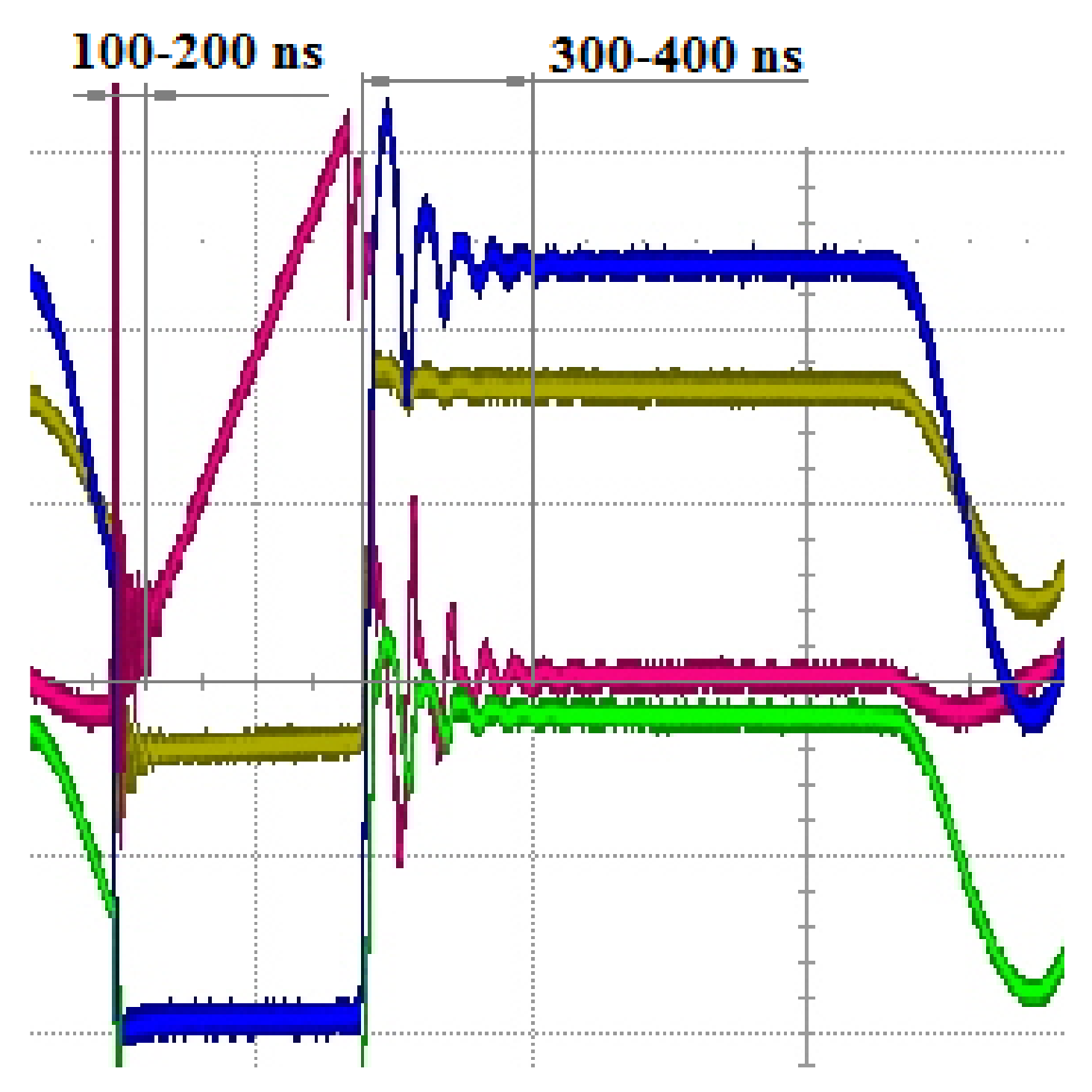
- Some specific parameters are given in Figure 9. The primary side current has a peak value immediately after the transistor is turned on. When it is turned off, its process has a typical oscillation in . Although these features are assumed to be normal, they have to be considered alongside the control system parameters. Two delay times are necessary for its correct operation, respectively, in ranges 100–200 ns and 300–400 ns as Figure 10 shows.
5. Conclusions
- The presented design procedure for a DC-DC flyback converter is correct and it can be used as part of the overall design of the converter.
- The schematic of the flyback converter with primary current sensing (Figure 3B) can be used as a battery charger and is particularly suitable for battery equalisation as part of a BMS. The schematic works under constant current and constant voltage (Figure 3D) and meets the battery charging requirements (Figure 2).
- As Figure 9 shows, the two delay times in the turn-on and turn-off processes are necessary.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jang, J.; Zhang, C. Fundamentals and Applications of Lithium-ion Batteries in Electric Drive Vehicles; John Wiley & Sons: Singapore, 2015; ISBN 978-1-118-41478-1. [Google Scholar]
- Link, A.; O’Connor, A.; Scott, T. Battery Technology for Electric Vehicles; Swales & Willis Ltd.: Devon, UK, 2015; ISBN 978-1-138-81110-2. [Google Scholar]
- Brec, E.; Muller, B. Electric Vehicle Batteries: Moving from Research Towards Innovation; Springer International Publishing: Cham, Switzerland, 2015; ISBN 978-3-319-12705-7. [Google Scholar]
- Andrea, D. Battery Management System for Large Lithium-Ion Battery Packs; Artech House: Boston, MA, USA; London, UK, 2010; ISBN 978-1-60807-104-3. [Google Scholar]
- Namith, T.; Shankpal, P. Design and Development of Efficient Battery Charging and Cell Balancing for Battery Management System. SASTech J. 2012, 11, 15–22. [Google Scholar]
- Douglass, J. Battery Management for High-Power Battery Stacks. CAN Newsletter 4/2010. 2010, pp. 34–38. Available online: https://can-newsletter.org (accessed on 15 August 2017).
- Hoog, J.; Alpcan, T.; Brazil, M.; Thomas, D.; Mareels, I. Optimal Charging of Electric Vehicles Taking Distribution Network Constraints into Account. IEEE Trans. Power Syst. 2014, 30, 365–375. [Google Scholar] [CrossRef]
- Li, L.; Lu, X.; He, J.; Sun, Z.; Yang, G. Design of New-generation Electric Vehicle Terminal. Energy Power Eng. 2013, 5, 1362–1366. [Google Scholar] [CrossRef]
- Barreras, J.; Swierczynski, M.; Schaltz, E.; Andreasen, J.; Christian, F.; Sauer, D.; Dirk, U. Christensen Functional Analysis of Battery Management Systems Using Multi-Cell HIL Simulator. In Proceedings of the 10th International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 31 March–2 April 2015. [Google Scholar]
- Gi-Heon, K.; Jeffrey, G.; Lustbader, J.; Pesaran, A. Thermal Management of Batteries in Advanced Vehicles Using Phase-Change Materials. World Electr. Veh. J. 2008, 2, 137–147. [Google Scholar]
- Paul, C.; Chao, P.; Chen, W.; Wu, R. A Battery Charge Controller Realized by a Flyback Converter with Digital Primary Side Regulation for Mobile Phones. Microsyst. Technol. 2014, 20, 1689–1703. [Google Scholar]
- Mayuri, R.; Purushotham, K.; Rao, B. High Efficient AC/DC Converter. Elect. Electron. Eng. 2017, 7, 43–47. [Google Scholar]
- Qiu, J.; He, L.; Wang, Y. A Multimode Digital Controller IC for Flyback Converter with High Accuracy Primary-Side Feedback. Comput. Electron. 2013, 14, 652–662. [Google Scholar] [CrossRef]
- Lian, K.; Hong, C. Current-Sensorless Flyback Converters Using Integral T-S Fuzzy Approach. Int. J. Fuzzy Syst. 2013, 15, 66–74. [Google Scholar]
- Chang, C.; Lin, Y.; Tzou, Y. Digital Primary-Side Sensing Control for Flyback Converters. In Proceedings of the International Conference on Power Electronics and Drive Systems, Taipei, Taiwan, 2–5 November 2009; pp. 689–694. [Google Scholar]
- Monolithic Power Systems (MPS). Application Note AN062 Rev.12, Flyback Converter Using the Primary-Side Regulator, 2012, MP020-5. Available online: https://www.monolithicpower.com/ (accessed on 15 August 2017).
- Qinghua, S.; Wengui, D. Basic Steps to Design a PSR Flyback Converter Using AP3706/08N, 2009, BCD Semiconductor Manufacturing Limited Application Note 1028, Rev 1.1. Available online: https://www.diodes.com/ (accessed on 15 August 2017).
- Fairchild Semiconductor Corporation Design Guideline for Flyback Charger Using FAN104WMX, 2012, Application Note AN-6093 Rev. 1.0.1. Available online: https://www.fairchildsemi.com (accessed on 15 August 2017).
- Fairchild Semiconductor Corporation, Design Guideline for LED Lamp Control Using Primary-Side Regulated Flyback Converter, FL103M, 2011, Application Note AN-9741 Rev. 1.0.0. Available online: https://www.fairchildsemi.com (accessed on 15 August 2017).
- ST Datasheet Production Data. Off-Line All-Primary-Sensing Switching Regulator. 2014. Available online: https://www.st.com (accessed on 15 August 2017).
- Ayachit, A.; Reatti, A.; Kazimierczuk, M.K. Magnetising Inductance of Multiple-Output Flyback DC-DC Convertor for Discontinuous-Conduction Mode. IET Power Electron. 2016, 10, 451–461. [Google Scholar] [CrossRef]
- Analog Devices Inc. Lithium Ion Battery Monitoring System AD7280. 2008. Available online: https://www.analog.com (accessed on 15 August 2017).
- Maxim Integrated Products, Inc. 5-Cell to 10-Cell Li+ Protector with Cell Balancing. 2010. Available online: https://www.maxim-ic.com (accessed on 15 August 2017).
- Maxim Integrated Products, Inc. 12-Channel, High-Voltage Battery-Pack Fault Monitors. 2010. Available online: https://www.maxim-ic.com (accessed on 15 August 2017).
- Saliva, A. Design Guide for Off-Line Fixed Frequency DCM Flyback Converter, Infineon Technologies North America, Design Note DN 2013-01. Available online: https://www.infineon.com (accessed on 15 August 2017).
- Saini, D.; Ayachit, A.; Reatti, A.; Kazimierczuk, M.K. Analysis and Design of Choke Inductors for Switched-Mode Power Inverters. IEEE Trans. Ind. Electron. 2018, 65, 2234–2244. [Google Scholar] [CrossRef]
- Luchetta, A.; Manetti, S.; Piccirilli, M.; Reatti, A.; Kazimierczuk, M. Effects of Parasitic Components on Diode Duty Cycle and Small-Signal Model of PWM DC-DC Buck Converter in DCM. In Proceedings of the IEEE 15th International Conference on Environment and Electrical Engineering, Rome, Italy, 10–13 June 2015; pp. 772–777. [Google Scholar]
- Luchetta, A.; Manetti, S.; Piccirilli, M.; Reatti, A.; Kazimierczuk, M. Derivation of Network Functions for PWM DC-DC Buck Converter in DCM Including Effects of Parasitic Components on Diode Duty-Cycle. In Proceedings of the IEEE 15th International Conference on Environment and Electrical Engineering, Rome, Italy, 10–13 June 2015; pp. 778–783. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| 350 V | |
| 400 V | |
| 380 V | |
| 5 V | |
| 10 A | |
| 66 kHz |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dimitrov, B.; Krishna, M.; Cruden, A.; Sharkh, S.; Elkhateb, A. Analysis, Design, and Experimental Validation of a Primary Side Current-Sensing Flyback Converter for Use in a Battery Management System. Electronics 2018, 7, 43. https://doi.org/10.3390/electronics7040043
Dimitrov B, Krishna M, Cruden A, Sharkh S, Elkhateb A. Analysis, Design, and Experimental Validation of a Primary Side Current-Sensing Flyback Converter for Use in a Battery Management System. Electronics. 2018; 7(4):43. https://doi.org/10.3390/electronics7040043
Chicago/Turabian StyleDimitrov, Borislav, Muthu Krishna, Andrew Cruden, Suleiman Sharkh, and Ahmad Elkhateb. 2018. "Analysis, Design, and Experimental Validation of a Primary Side Current-Sensing Flyback Converter for Use in a Battery Management System" Electronics 7, no. 4: 43. https://doi.org/10.3390/electronics7040043