Numerical Solution of Fractional Diffusion Wave Equation and Fractional Klein–Gordon Equation via Two-Dimensional Genocchi Polynomials with a Ritz–Galerkin Method


Abstract
:1. Introduction
2. Basic Concept for Fractional Calculus
3. Genocchi Polynomials and Function Approximation
3.1. Definition and Properties of Genocchi Polynomials
3.2. Function Approximation of Genocchi Polynomials
4. Ritz–Galerkin Method with the Two-Dimensional Genocchi Polynomials Basis
4.1. Ritz–Galerkin Method
4.2. Satisfier Function
4.3. Transformation of Nonhomogeneous Initial and Boundary Conditions into Homogeneous Conditions
5. Error Bound
6. Numerical Results
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Povstenko, Y. Linear Fractional Diffusion-Wave Equation for Scientists and Engineers; Springer: Berlin/Heidelberg, Germany, 2016; pp. 1–460. ISBN 978-3-319-17954-4. [Google Scholar]
- Nagy, A.M. Numerical solution of time fractional nonlinear Klein–Gordon equation using Sinc-Chebyshev collocation method. Appl. Math. Comput. 2017, 310, 139–148. [Google Scholar] [CrossRef]
- Bhrawy, A.H.; Doha, E.H.; Baleanu, D.; Ezz-Eldien, S.S. A spectral Tau algorithm based on Jacobi operational matrix for numerical solution of time fractional diffusion-wave equations. J. Comput. Phys. 2015, 293, 142–156. [Google Scholar] [CrossRef]
- Heydari, M.H.; Hooshmandasl, M.R.; Ghaini, F.M.; Cattani, C. Wavelets method for the time fractional diffusion-wave equation. Phys. Lett. A 2015, 379, 71–76. [Google Scholar] [CrossRef]
- Hosseini, V.R.; Shivanian, E.; Chen, W. Local radial point interpolation (MLRPI) method for solving time fractional diffusion-wave equation with damping. J. Comput. Phys. 2016, 312, 307–332. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, Y.; Huang, Y.; Wei, H. Spectral collocation method for the time-fractional diffusion-wave equation and convergence analysis. Comput. Math. Appl. 2017, 73, 1218–1232. [Google Scholar] [CrossRef]
- Zeng, F. Second-order stable finite difference schemes for the time-fractional diffusion-wave equation. J. Sci. Comput. 2015, 65, 411–430. [Google Scholar] [CrossRef]
- Yaseen, M.; Abbas, M.; Nazir, T.; Baleanu, D. A finite difference scheme based on cubic trigonometric B-splines for a time fractional diffusion-wave equation. Adv. Differ. Equ. 2017, 2017, 274. [Google Scholar] [CrossRef]
- Tamsir, M.; Srivastava, V.K. Analytical study of time-fractional order Klein–Gordon equation. Alex. Eng. J. 2016, 55, 561–567. [Google Scholar] [CrossRef]
- Mohebbi, A.; Abbaszadeh, M.; Dehghan, M. High-order difference scheme for the solution of linear time fractional Klein–Gordon equations. Numer. Methods Part. Diff. Equ. 2014, 30, 1234–1253. [Google Scholar] [CrossRef]
- Odabasi, M.; Misirli, E. On the solutions of the nonlinear fractional differential equations via the modified trial equation method. Math. Methods Appl. Sci. 2018, 41, 904–911. [Google Scholar] [CrossRef]
- Barikbin, Z.; Ellahi, R.; Abbasbandy, S. The Ritz–Galerkin method for MHD Couette flow of non-Newtonian fluid. Int. J. Ind. Math. 2014, 6, 235–243. [Google Scholar]
- Rashedi, K.; Adibi, H.; Dehghan, M. Determination of space-time-dependent heat source in a parabolic inverse problem via the Ritz–Galerkin technique. Inverse Probl. Sci. Eng. 2014, 22, 1077–1108. [Google Scholar] [CrossRef]
- Barikbin, Z.; Keshavarz Hedayati, E. Exact and approximation product solutions form of heat equation with nonlocal boundary conditions using Ritz–Galerkin method with Bernoulli polynomials basis. Numer. Methods Part. Differ. Equ. 2017, 33, 1143–1158. [Google Scholar] [CrossRef]
- Barikbin, Z. Two-dimensional Bernoulli wavelets with satisfier function in the Ritz–Galerkin method for the time fractional diffusion-wave equation with damping. Math. Sci. 2017, 11, 195–202. [Google Scholar] [CrossRef] [Green Version]
- Padma, S.; Hariharan, G. Analytical expressions pertaining to the steady state Concentrations of Glucose, Oxygen and Gluconic Acid in a Composite Membrane Using Genocchi Polynomials. Arab. J. Sci. Eng. 2017, 43, 3529–3539. [Google Scholar] [CrossRef]
- Isah, A.; Phang, C. Operational matrix based on Genocchi polynomials for solution of delay differential equations. Ain Shams Eng. J. 2017, 1–6. [Google Scholar] [CrossRef]
- Isah, A.; Phang, C. New operational matrix of derivative for solving non-linear fractional differential equations via Genocchi polynomials. J. King Saud Univ. Sci. 2017, 1–7. [Google Scholar] [CrossRef]
- Isah, A.; Phang, C.; Phang, P. Collocation method based on genocchi operational matrix for solving generalized fractional Pantograph equations. Int. J. Differ. Equ. 2017, 2017, 2–10. [Google Scholar] [CrossRef]
- Diethelm, K. The Analysis of Fractional Differential Equations: An Application-Oriented Exposition Using Differential Operators of Caputo Type; Springer: Berlin/Heidelberg, Germany, 2010; pp. 3–245. ISBN 978-3-642-14573-5. [Google Scholar]
- Reutskiy, S.Y. A new semi-analytical collocation method for solving multi-term fractional partial differential equations with time variable coefficient. Appl. Math. Model. 2017, 45, 238–254. [Google Scholar] [CrossRef]
- Liu, F.; Meerschaert, M.; McGough, R.; Zhuang, P.; Liu, Q. Numerical methods for solving the multi-term time-fractional wave-diffusion equation. Fract. Calc. Appl. Anal. 2013, 16, 9–25. [Google Scholar] [CrossRef] [PubMed] [Green Version]

{kind=link}
| Our Method | Ref. [4] | Our Method | Ref. [4] | Our Method | Ref. [4] | |
|---|---|---|---|---|---|---|
| (0.1,0.1) | 1.15559 | 6.7028 | 4.97870 | 6.0407 | 1.15539 | 2.0243 |
| (0.2, 0.2) | 5.15080 | 1.8718 | 3.22420 | 1.5683 | 1.02961 | 5.9155 |
| (0.3, 0.3) | 2.63293 | 3.0913 | 2.27559 | 2.7985 | 1.66006 | 1.0947 |
| (0.4, 0.4) | 4.60055 | 4.0221 | 4.25541 | 3.7035 | 3.66878 | 1.6790 |
| (0.5, 0.5) | 5.41170 | 4.5801 | 5.14200 | 3.8089 | 4.80654 | 1.6277 |
| (0.6, 0.6) | 1.50610 | 4.5260 | 1.44824 | 3.6309 | 1.35084 | 1.9284 |
| (0.7, 0.7) | 3.84166 | 4.0597 | 3.71459 | 3.2603 | 3.51060 | 6.2825 |
| (0.8, 0.8) | 5.05410 | 3.1039 | 4.88530 | 6.5594 | 4.63092 | 1.0181 |
| (0.9, 0.9) | 2.89942 | 1.7283 | 2.76030 | 7.1269 | 2.57007 | 2.0918 |
| Our Method | Ref. [3] | |
|---|---|---|
| 1.2 | 1.11 | 5.35 |
| 1.4 | 1.11 | 1.01 |
| 1.6 | 1.11 | 8.77 |
| 1.8 | 1.11 | 2.27 |
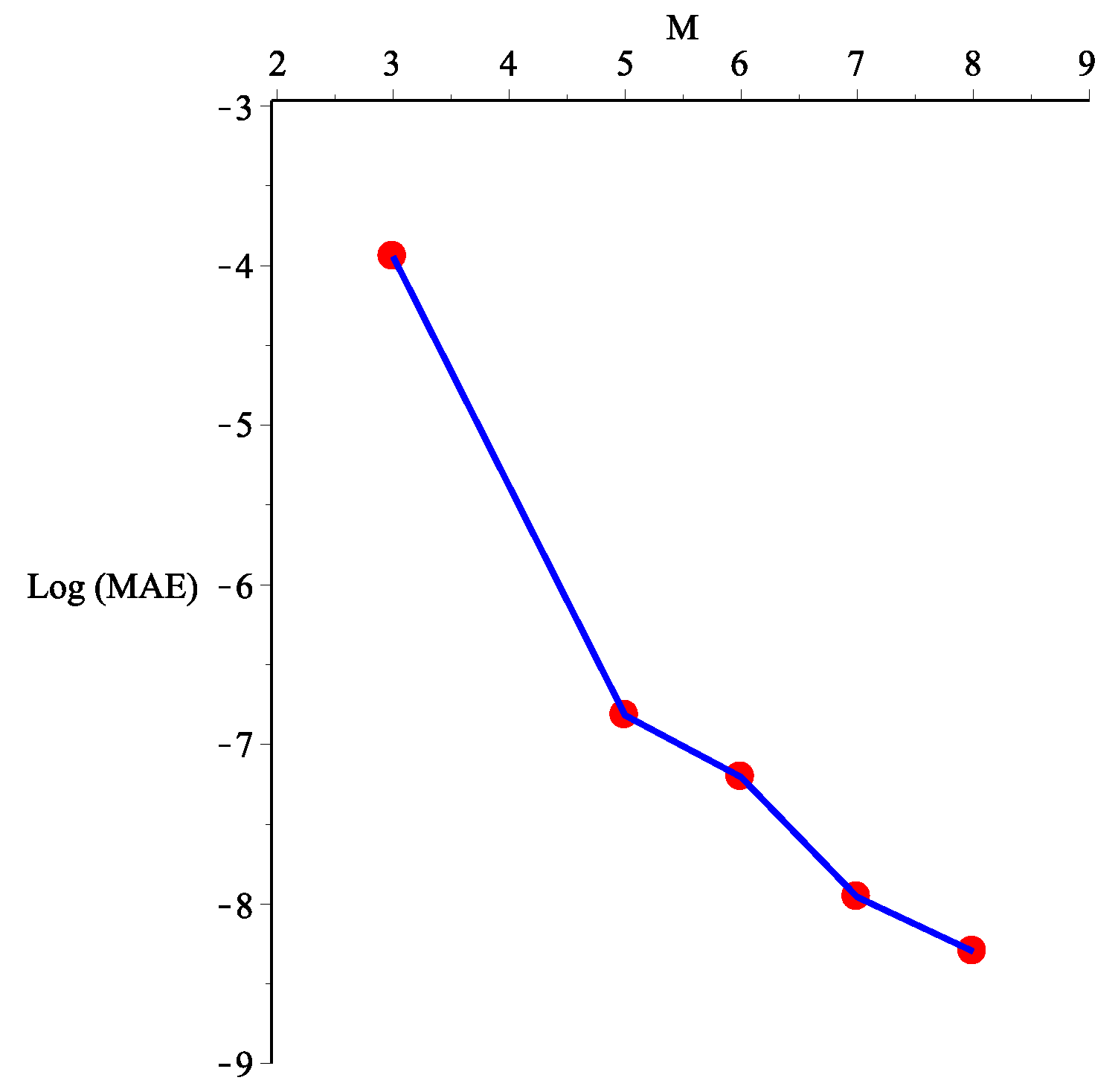
| M | Our Method | Ref. [10] | |
|---|---|---|---|
| 3 | 8.2146 | 1.3189 | |
| 4 | 2.9523 | 3.3035 | |
| 5 | 7.9725 | 8.2925 | |
| 6 | 6.1421 | 2.0856 | |
| 7 | 9.9173 | 5.2649 |
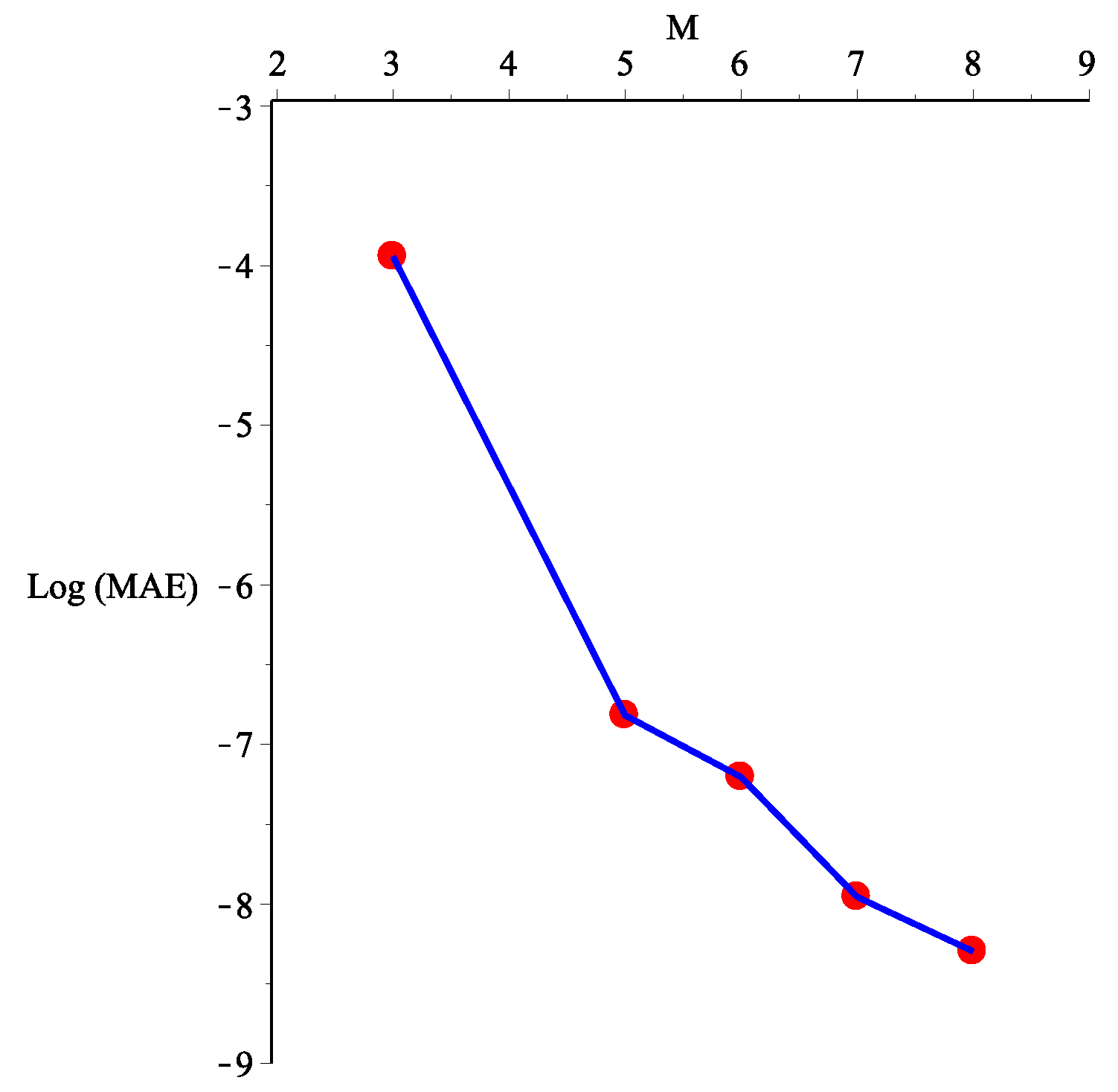
| M | Our Method | Ref. [10] | |
|---|---|---|---|
| 3 | 8.2677 | 3.7014 | |
| 4 | 2.9040 | 1.5270 | |
| 5 | 2.4291 | 6.2904 | |
| 6 | 5.6104 | 2.5916 | |
| 7 | 7.7767 | 1.0715 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kanwal, A.; Phang, C.; Iqbal, U. Numerical Solution of Fractional Diffusion Wave Equation and Fractional Klein–Gordon Equation via Two-Dimensional Genocchi Polynomials with a Ritz–Galerkin Method. Computation 2018, 6, 40. https://doi.org/10.3390/computation6030040
Kanwal A, Phang C, Iqbal U. Numerical Solution of Fractional Diffusion Wave Equation and Fractional Klein–Gordon Equation via Two-Dimensional Genocchi Polynomials with a Ritz–Galerkin Method. Computation. 2018; 6(3):40. https://doi.org/10.3390/computation6030040
Chicago/Turabian StyleKanwal, Afshan, Chang Phang, and Umer Iqbal. 2018. "Numerical Solution of Fractional Diffusion Wave Equation and Fractional Klein–Gordon Equation via Two-Dimensional Genocchi Polynomials with a Ritz–Galerkin Method" Computation 6, no. 3: 40. https://doi.org/10.3390/computation6030040