Group Buying-Based Data Transmission in Flying Ad-Hoc Networks: A Coalition Game Approach


1
The College of Communications Engineering, Army Engineering University of PLA, Nanjing 210000, China
2
Key Embedded Technology and Intelligent System Laboratory, College of Information Science and Engineering, Guilin University of Technology, Guilin 541006, China
3
PLA 75836 Troops, Guangzhou 510400, China
*
Author to whom correspondence should be addressed.
Information 2018, 9(10), 253; https://doi.org/10.3390/info9100253
Submission received: 13 September 2018
/
Revised: 4 October 2018
/
Accepted: 11 October 2018
/
Published: 15 October 2018
(This article belongs to the Section Information and Communications Technology)
Abstract
:In scenarios such as natural disasters and military strikes, it is common for unmanned aerial vehicles (UAVs) to form groups to execute reconnaissance and surveillance. To ensure the effectiveness of UAV communications, repeated resource acquisition issues and transmission mechanism designs need to be addressed urgently. Since large-scale UAVs will generate high transmission overhead due to the overlapping resource requirements, in this paper, we propose a resource allocation optimization method based on distributed data content in a Flying Ad-hoc network (FANET). The resource allocation problem with the goal of throughput maximization is constructed as a coalition game framework. Firstly, a data transmission mechanism is designed for UAVs to execute information interaction within the coalitions. Secondly, a novel mechanism of coalition selection based on group-buying is investigated for UAV coalitions to acquire data from the central UAV. The data transmission and coalition selection problem are modeled as coalition graph game and coalition formation game, respectively. Through the design of the utility function, we prove that both games have stable solutions. We also prove the convergence of the proposed approach with coalition order and Pareto order. Based on simulation results, coalition order based coalition selection algorithm (CO-CSA) and Pareto order based coalition selection algorithm (PO-CSA) are proposed to explore the stable coalition partition of system model. CO-CSA and PO-CSA can achieve higher data throughput than the contrast onetime coalition selection algorithm (Onetime-CSA) (at least increased by 34.5% and 16.9%, respectively). Besides, although PO-CSA has relatively lower throughput gain, its convergence times is on average 50.9% less than that of CO-CSA, which means that the algorithm choice is scenario-dependent.
1. Introduction
Unmanned aerial vehicle (UAV) communication technology has been widely applied in many mission scenarios, such as detection and monitoring. In scenarios such as natural disasters and military strikes, UAVs can support terrestrial networks and provide a variety of communication means, which greatly promote wireless communication technology [1]. UAVs can intelligently handle various task requirements due to its self-organizing characteristics [2,3,4,5]. Information interaction plays a vital role among UAVs, while communicating mission such as data sharing and relay transmission can be carried out in a cooperative manner [6,7]. In that situation, we focus on efficient transmission of information and quality assurance of UAV communication, which determines the execution capability of cooperative UAV groups. Data transmission is performed in a routing manner: we study Flying Ad-hoc Networks (FANET) and optimize the problem by characterizing an appropriate routing mechanism.
Much work has focused on this project, especially on information collection and transmission. Thammawichai et al. [8] considered a multi-UAV information collection scenario, and obtained the trade-off between communication and computational energy by proposing a mixed-integer optimization formulation. Target tracking and area mapping can be well settled by this application. Effective cooperative mechanisms are also studied, where UAV groups can improve task handing efficiency. Fan et al. [9] investigated the problems of UAV node placement and communication resource allocation. In this model, a one rotary-wing UAV was served as a relay to optimize system throughput. Besides, a terrestrial communication network is introduced in [10], where UAVs provided an efficient scheme to achieve wireless coverage for the ground terminals. An expression to estimate the energy consumption for transmitting and receiving through RF signals is introduced in [11]. In our previous work, we adopted energy consumption function to study the tradeoff between the coverage performance and transmission overhead, and then proposed an efficient multi-UAV cooperative deployment model to optimize the coverage utility [12].
Data transmission under the cooperative mechanism will bring benefits to FANETs. However, most works have placed too much emphasis on communication link quality and data processing, while ignoring the characteristics of the data resources themselves. In fact, data resources acquired by different UAVs usually have overlapping content (e.g., flight instruction). An efficient solution is urgently needed to solve the data waste phenomenon in high data transmission cost situation.
Group buying mechanism is introduced in spectrum market, where the high cost problem of spectrum acquisition can be effectively solved [13]. By utilizing this mechanism, UAVs form different groups and transmit data once in groups, instead of repeatedly requiring the same data from the central UAV. Zhang et al. [14] proposed a context-aware group buying mechanism in resource acquisition, and modeled the problem as the coalition formation game (CFG) [15] for sharing data traffic and reduce overlapping download and transmission cost. Note that coalition formation game can well describe the relationships between UAVs and can be the basis for investigating cooperative manners of UAVs. In terms of the overlapping data content of information, we utilized a overlapping coalition formation (OCF) game model to optimize the cost of spectrum group-buying in [16].
However, the definition of transmission overhead and the transmission mechanism within the UAV coalition has been simplified. Hence, inspired by the design of packet delivery ratio channel model in [17], we propose a resource allocation optimization method based on distributed data content, and design a coalition selection and data transmission mechanism based on group buying. In the proposed model, data throughput is used to describe the overhead caused by the transmission path. Moreover, coalition game is introduced to explore the stable partitions of the problem.
The main contribution in this paper can be summarized as follows:
- A resource allocation optimization method based on distributed data content is proposed, where different data content is considered to transmit to UAVs which have corresponding data requirements. The designed utility function based on data transmission probability can reflect both link qualities and the efficiency of resource transmission. This provides theoretical support for the UAVs’ coalition selections and the formation of internal stable structures.
- We propose a coalition game framework to solve resource allocation and data transmission problems. In the framework, coalitional graph game characterizes the inner coalition structure (transmission mechanism). Data resource allocation of UAVs is analyzed in coalition formation game (CFG). Both games are proven to have stable solutions, indicating the effectiveness of our proposed model.
- A cooperative coalition selection mechanism is proposed to improve the performance of system model. CO-CSA and PO-CSA are designed to execute cooperative exchange mechanism. Simulation results show that both CO-CSA and PO-CSA achieve better performance than Onetime-CSA. In addition, the performance of CO-CSA is better than PO-CSA, while PO-CSA converges in less time.
Note that this work introduces the packet delivery ratio channel model from [17], the main differences are as follows:
(1) This paper considers the different data packet contents required by all UAVs. According to the deployment relationships between the given UAVs, the transmission mechanism is studied by rationally selecting UAVs to cooperate and designing the multi-hop forwarding scheme. (2) The data transmission problem with the goal of maximal throughput is modeled as a coalition game framework. Then, a coalition selection mechanism is investigated to converge our problem to the stable solution.
The rest of the paper is organized as follows. Section 2 shows the system model of multi-UAV cooperative transmission model based on group buying. The latter part is problem formulation. In Section 3, a coalition graph game for system model is analyzed to characterize the internal structure of the UAV groups. Coalition formation game is investigated in Section 4, and a learning algorithm is designed to converge the proposed problem to the stable state. Section 5 gives simulation results and analysis. Finally, the concluding remarks are given in Section 6.
2. System Model and Problem Formulation
2.1. System Model
We consider a FANET consisting of N UAVs. There are two sorts of UAVs: one is central control UAV (set to one in this scenario), and others are UAVs that exists in groups (formation). The central control UAV has a stronger battery life and sufficient spectrum resources. It plays the role of flying base station for UAV groups, providing data resources and instructions for other UAVs. UAVs can be able to get all information in context awareness and location awareness. In that case, group-buying is introduced to overcome high cost of repeated resource acquisition. When UAV groups have resource requirements (e.g., spectrum), they request the central control UAV and obtain the resources through the designed data transmission mechanism. Due to the high transmission loss caused by long distance of data packets, it requires UAV groups to utilize some UAVs as relays to reduce loss and improve transmission quality.
Here, a set of UAV group is defined as . The serial number of the central UAV is set to 0. For each UAV , its three-dimensional coordinates is denoted as . The data resource requirements are defined as . For ease of calculation, assume that all data packets are the same size. The data requirements for UAV n can be described as , where represents the the size of UAV n’s data packet, is the content of UAV n’s data, , and represents the total data requirements in the whole network.
In UAV-to-UAV communication, the transmission distance can significantly affect the quality of the link. Pinto et al. [17] analyzed the experiments in the same RF band and collected data such as distance, data packet and orientation. The experiments are carried out using the AR Drone 2.0 platform [18], where they use their native wireless IEEE 802.11 g interface. Then, a mathematical channel model is designed, from which the packet delivery ratio (PDR) of collected data can be well predicted given the distance between two nodes. The generic form of the proposed PDR channel model is given by:
where represents the distance between two UAVs when the packet success rate is 50% in the links. is transmission coefficient. represents the success probability of packet transmission within two UAV nodes. It can reflect both link qualities and the efficiency of resource transmission. As can be seen from the above, the success probability of packet transmission is determined by the transmission distance. Besides, the function is strictly non-increasing, (d), and can be derived as 0 and 1 at and at , respectively. All features of the channel model meet the characteristics of data packet transmission in the link layer. For convenience, let be the distance between UAV i and j.
Figure 1 shows a diagram of data multi-hop transmission considering coalition formation in UAV networks. First, the set of available coalition is denoted as , i.e., , represents UAV n’s coalition selection. In the scene, distributed UAVs with spectrum resources form different coalitions, considering specific data content (e.g., Data 2). Then, the coalition cluster-head UAVs download data from the central UAV through UAV-to-UAV links, and transmit data to the members of their coalitions through designed multi-hop routing mechanism. Suppose is the set of all existing UAV-to-UAV links for data transmission. For , let be the link status from node i to j. Specially, we say the link exists considering data content s, if . The value of is set to be , representing the distance between current link.
2.2. Problem Formulation
From the above system model, the coalition selection problem considering overlapping data requirements should be addressed to reduce overall spectrum requirement overhead. Context awareness is introduced to describe the relation among different UAVs’ data contents. However, first, the relation in coalition should be well studied.
To maximize the overall data transmission throughput in different coalitions, the connected graph is considered to depict the UAV-to-UAV links. For the UAV group in coalition m considering content requirement s, the coordinates of cluster head UAV is . Then, in UAV n’s current forming coalition based on data content s, the data packet transmission probability through multi-hop path from cluster head UAV to UAV n can be derived as follows:
Here, represents the set of links of from the cluster head UAV to the cluster member UAV n.
Denote the coordinate of the central UAV as . When content is considered, the network can form a coalition partition . The UAV subsets which belong to coalition m based on content s is described as . The data transmission speed is defined as , and then we characterize the transmission throughput of UAVs in coalition m when considering data content s as follows:
The function consists of two items, the first item is the transmission probability of one data content transmitted from the central UAV to the coalition m. The latter item of the equation is the successful transmission probability of single data packet transmitted from cluster head UAV to cluster member UAV n.
Therefore, the total transmission throughput of the whole network when content s is considered can be calculated as follows:
Obviously, the longer the path per hop is, the lower the probability of a success transmission will be, and, similarly, the more hops data transmits, the smaller the overall throughput is, so there will be no major league or single-coalition full path formation. Therefore, the transmission throughput of the whole network based on all data is:
Our object is to maximize the data throughput of the whole network by adjusting the network structure of the UAV group and coalition selection considering different contents.
From the view of each data , our object is to obtain an independent solution in the FANET, including the optimal data transmission mechanism and resources allocation approach. In the next two sections, we model the problem as a coalitional graph game and a coalition formation game, and analyze the proposed model. The key to solving is to accurately characterize UAVs’ action and prove the stability of the proposed coalition game framework.
3. Coalitional Graph Game for Data Transmission
We first focus on data transmission when the group-buying mechanism is determined. Notably, traditional centralized solution cannot afford the high computational burden of solving due to the enormous edge (link) selection strategies. Besides, random establishment of UAV-to-UAV links may cause the FANETs suffer from low data throughput. In this section, we formulate the problem of data transmission in FANETs as a game. Here, a coalitional graph game model is introduced to coordinate all the UAV-to-UAV links among UAVs of the entire network. According to the previous description, the interactions among the UAVs is an action graph [19]. In this model, each UAV decides to connect to or be connected to other UAVs to maximize its own utility that takes into account data throughput as well as link maintaining cost.
Definition 1 (Coalitional graph game [15]).
We call a coalitional graph game where:
- is a set of all nodes (including central UAV).
- ε is the set of all edges (UAV-to-UAV links). For any , we say the link from i to j exists, if .
- is the available coalition selections for each , let denote the coalition selection for n.
- represents the utility function of UAV n while playing its strategy.
Consider the characteristics of routing mechanism in one coalition, the strategy of each UAV should be the UAV of n’s previous hop. Formally, denote as the strategy selection of UAV n, where . Thus, learning from [19,20], a local strategy is called a feasible local strategy if and only if: (1) ; and (2) for . Here, G is the current graph, and is the consequent graph by UAV n’s local strategy . In summary, the local utility function is derived and given in the following.
(1) Utility function
Given an action graph , the UAV n’s local utility function can be expressed as:
It can be seen that , representing the transmission probability for data packet s in coalition and is determined by UAV n’s connecting drone’s selection , which affects eventually. It should be pointed out that the value of and are the same, since two functions both represent the current coalition ’s transmission probability for data s.
Centralized approach will cause much calculation load. In that case, a distributive network formation algorithm is proposed for each UAV n to carry out in our coalitional graph game, which is classified as follows:
Note that the proposed algorithm actually focuses on maximizing the current utility of coalition , we can obtain and by setting up different data content and UAV. Next, the convergency of the proposed network formation games is analyzed.
(2) Convergency and stability
To study the properties of stability, definition of local Nash network is given in the following.
Definition 2 (Local Nash network [19]).
A network graph G is a local Nash network in which no node n can improve its utility by a unilateral change in its feasible local strategy .
Note that there exists an upper bound of overall data resource requirements; the best response algorithm can finally converge the problem to the stable state. Thus, we utilized the thoughts of best response and design a throughput maximization network formation algorithm (Algorithm 1) in network formation. In Algorithm 1, UAV n selects its strategy by improving the value of its local utility. Knowing that the value of equals that of , we can conclude that our proposed model is a feasible local strategy. Suppose the proposed algorithm will converge to a final graph . In addition, in graph , no UAV can improve through adjusting strategy due to the proposed algorithm, which satisfy the characteristic of Definition 2.
Therefore, under the feasible local strategy and the network formation algorithm, the coalitional graph game is proven to be a local Nash network. Generally, pairwise stability exists in , which indicates that can achieve a stable state.
| Algorithm 1 Throughput maximization network formation algorithm. |
(1) Input , set . (2) while: All UAVs in coalition are connected considering data content s, i.e., . 1: Find , , UAV , where . 2: Find UAV m if where . 3: Offer UAV i and UAV m a new link . Add i and to and , respectively. End (3) Output routing link and UAV n’s current coalition ’s throughput . |
4. Coalition Formation Game for Resources Allocation based on Group Buying
Since UAVs in FANETs should form coalitions to optimize the overall performance of the proposed model, the properties of the coalition formation game is studied in this section.
Definition 3 (Coalition formation game, CFG [15]).
A (hedonic) coalition formation game is given by a pair , where denotes the preferences profile, specifying for each player his preference relation .
4.1. Game Model
Suppose the available coalitions of UAV n is denoted as . Formally, the game can be characterized as , where represents UAV n’s utility function and is expressed as , in which is the state profiles of all the UAVs excluding n. In , the value of a coalition depends solely on the members of that coalition, with no dependence on the other UAVs in . Thus, is the characteristic form.
In our system model, from the perspective of the UAV, coalitions considering different data content will have common UAV members. Hence, UAVs in play their strategies to form an overlapping coalition structure, from which they could get the benefit [21]. This satisfies the characteristic of overlapping coalition formation game (OCF game). However, in the system model analysis of this paper, we focus on the coalition formation based on different data content, which also avoids the formation of overlapping coalitions. Overall, the model is built into a CFG.
Given the stable state of coalition graph game , the network topology is determined, thus the local utility function of UAV n can be denoted as follows:
According to Equation (8), the UAV n’s local utility represents the data throughput of its current coalition, and is determined by both itself and other UAVs in . This shows that the value of this coalition depends on the joint actions selected by all UAVs in this coalition, which illustrates that is a nontransferable utility (NTU) game [22].
In CFG, coalition partitions are denoted as a set which partitions all the UAVs . According to Definition 3, the coalition selection of UAV i is determined by its preference relation . Next, two orders are introduced as the basis for evaluation of game analysis. UAVs evaluate and select coalition strategies under different orders, which directly affects the stable solution of the model.
Definition 4 (Pareto order [23]).
The preference relation of coalition partition Π satisfies Pareto order if, for arbitrary UAV n and coalitions and ,
In Pareto order, for the UAV n completing the coalition selection, neither the profit of the UAVs in its original coalition nor that in its new coalition will be damaged. This feature ensures that the overall profit of the coalition partitions will never fall, which provides sufficient theoretical support for the proof of the stable partition. The Pareto order is available for both (transferable utility) TU and NTU games [15].
Although stable partition can be obtained with Pareto order, optimal solution of cannot be guaranteed. Motivated by the work in [24], we adopt coalition order and solve the proposed problem by mapping the overall utility of system model to UAV’s local utilities.
Definition 5 (Coalition order).
The preference relation of coalition partition Π satisfies coalition order if, for arbitrary UAV n and coalitions and ,
In coalition order, UAV n selects coalition by considering the total utility of both original coalition and new coalition . Hence, it can bring the maximal profit for the system model, which is reflected in the subsequent proof and simulation.
Bala et al. [25] introduced two simple rules called merge and split, which are employed to form and break coalitions, respectively. Both rules are concerned with the value of the coalition. For example, in merge rule, coalition and agree to merge into coalition when this new coalition is preferred by the UAVs, all of which can improve their profit. On the contrary, a coalition can be split into coalition and when each UAV in their new coalition can achieve a better profit. However, these two rules overemphasize the role of the entire coalition. During the formation process, the UAVs in the same coalition will change their strategy in batches. In such orders, once the initial selections are poor, UAVs will be trapped prematurely in their fixed combination with some other UAVs. In addition, in the late stage of convergence, little effect will make the coalition structure under the corresponding rules. Hence, it is difficult to make actions, resulting in useless calculations.
To avoid those problems (local optimum, invalid calculation, etc.) caused by traditional rules, we design the following mechanism for coalition selection.
Definition 6 (Coalition selection mechanism).
UAV will select when the newly formed coalition can achieve a better utility.
Under different rules, the utility function of this mechanism has different definitions. For example, in the Pareto rule, the coalition selection of UAV n achieves the better respective benefits of the two coalition. In the coalition order, UAV n selects coalition considering the common profit of both coalitions.
This mechanism can realize the functions of both rules, and avoid the batch strategy selection of the UAVs. Therefore, even if the strategy selection of the UAVs takes a detour, it can still be on the right track soon. The next subsection introduces the analysis of the stable partition of CFG under the given coalition selection mechanism.
4.2. Analysis of the Stable Coalition Partition
Definition 7 (Stable coalition partition [14]).
A coalition partition Π is said to be stable if no player (e.g., n) can benefit from moving from his coalition to another existing coalition with the corresponding order, i.e., if
then Π is thought to be a stable coalition partition.
In the following, stability of the final coalition partition is demonstrated based on coalition selection mechanism with different orders.
Theorem 1.
The proposed CFG with Pareto order has at least one stable coalition partition.
Proof.
First, according to the description in Section 3, for arbitrary partitions , the coalitional graph game can achieve a stable state, representing the stability of the internal coalition structure.
Then, we consider CFG ; from the above description, the utility of each coalition involving its associated UAVs will not be damaged under this rule. Due to the fixed original data information, the local utility is bound to be limited. Therefore, the coalition partition on the system will shift continuously between finite states [26]. □
Before the proof of stable coalition partition with coalition order, exact potential game (EPG) is first introduced. Considering the distributed characteristics under the multi-agent system, the formation of coalitions under this rule can be characterized by the EPG through UAVs’ strategy selections.
Definition 8 (Exact potential game [27]).
For utility function in a game , if there exists a function , for arbitrary UAV’s (e.g., n’s) coalition strategy changing from to , the following equation is true:
then this game is called exact potential game (EPG) and has at least one Nash equilibrium (NE) point; the function is called potential function.
The NE point guarantees the stability of the UAV strategy selection and system model utility. When the potential function has physical meaning, the NE point can also determine its final convergence state.
Theorem 2.
The proposed CFG with coalition order has at least one stable coalition partition.
By constructing the potential function, we introduce the potential game as a tool to analyze the performance and stability of the designed utility function [28]. In potential game, there exists at least one pure Nash equilibrium. Next is the proof of the Theorem 2.
Proof.
First, from the view of any data content, e.g. s, the stability of the internal coalition structure has been proved in the above.
Then, we construct the potential function as follows: , which represents the overall transmission throughput of data s. It can be concluded that
Note that UAV n’s one step strategy only changes the utility of its original coalition and new coalition , but has no effect on other existing coalition. Thus, the first and the third item are equal in value. According to Equations (8) and (14), we have the following formula:
Thus, the current game can be proven to be an exact potential game (EPG) [29], which has at least one pure Nash equilibrium (NE) point. Since the potential function numerically refers to the overall transmission throughput of the data s, the constructed utility function can eventually work out the optimal solution of through local interaction.
According to the characteristic of NE, the coalition partition can be proved to be stable considering different data content, as no other player can promote its utility function by changing its coalition selection strategy. Hence, there exists at least one stable coalition partition in CFG . □
Theorem 3.
Given the designed coalition mechanism, the proposed CFG has a stable coalition partition of .
Proof.
Based on the above proof of the stable partition existence with both orders, there always exists a local Nash network , then is derived.
Then, in the designed coalition selection mechanism, definition of utility is different under different orders. For example, in the Pareto order, the shift action of a single UAV increases the profit of the respective UAVs in the old and new coalition. According to the previous description in Theorem 1, the coalition partition on the system will shift continuously between finite states, which are fixed stable partition solutions.
In the coalition order, when the exchange mechanism happens, it improves the selected UAVs’ local utilities, which are equivalent to the direction towards the overall utility. UAVs that are not in the relevant coalition are not affected as their local utility is determined by other coalitions. It should be noted that the strategy change of a single UAV directly affects the whole system, so the utility of the system can converge to the optimal state. In addition, even if a single UAV’s selection mechanism puts the convergence process at a disadvantage, the coalition order will put the path back in the right direction, eventually forming a stable coalition partition . It can effectively avoid local optimum, but at the same time, more convergence times will be caused. The proofs of the stable coalition partitions under different data are also similarly available. Then, we can explore the network structure of the UAV coalition and coalition selection ;.
In summary, given the designed coalition mechanism, the proposed CFG has a stable coalition partition of . □
Simulation results in the next section verify the existence of ’s stable state.
4.3. Algorithm Design
In our scenario, UAVs can get all information in context awareness and location awareness, thus coalition selection mechanism can be utilized in a centralized way to solve the proposed problem. It is known that learning algorithms have great efficiency in solving pure strategy NE points [30]. Compared to traditional search algorithms, learning algorithms can significantly improved search efficiency and of the strategy, especially facing diversity strategy sets. The mechanism we propose emphasizes single UAV’s strategy selection. Combining the mechanism with the feature of the learning algorithm in exploring and selecting, strategy selection can hardly fall into trap loop (local optimum).
Therefore, motivated by learning algorithm design in [31,32], we construct a coalition selection algorithm based on coalition order and a coalition selection algorithm based on Pareto order, which can be abbreviated as CO-CSA and PO-CSA, respectively (Algorithm 2). The core of the algorithm is to follow the coalition selection mechanism; according to Theorem 3, it can converge in the solution of the problem. Here, is the learning parameter ().
| Algorithm 2 Coalition order/(Pareto order) based coalition selection algorithm, CO-CSA/(PO-CSA) |
Step 1: Initialize UAVs’ state strategies considering data content s. Loop: IterationMax Step 2: Select one UAV randomly, say i. . Step 3: Input into Algorithm 1 and obtain . Calculate according to Equation (8). Step 4: UAV i generate a new strategy . . Step 5: Input into Algorithm 1 and obtain . Calculate according to Equation (8). Step 6: UAV i update strategy with coalition order/ (Pareto order) according to Equation (10)/(Equation (9)), and the update probability is given as follows: Step 7: Update . End loop: |
5. Simulation Results and Discussion
We used Matlab 2016a as our simulation tool, in which all the scenario parameter settings and algorithm simulations were performed. In the simulation, we considered a planar square scenario where distributed UAVs carry out data transmission. According to the standard of IEEE 802.11 g, the working frequency band is 2.4 GHz, and the ideal transmission rate is 54 Mbps. All experiments considered parameters of proposed PDR model in [17] with 200-byte long packets and parallel UAVs, which makes and m. Besides, transmission rate is set to be 800 pkts/s in the PDR model, so each data content s’s data transmission speed is Mbps. Note that the data transmission of UAV exists successively and the transmission rate of UAV in each time slot meets the requirements. For better interactive control with the UAV formation, the horizontal position of the central UAV should be set at the center of the whole network. Meanwhile, to ensure the communication quality, the relative distance between the central UAV and the scenario cannot be too far according to the setting of R. Thus, the coordinates of the central UAV are set to (100, 100, 30) (m), where the third dimension coordinate represents the relative height to the scenario.
We considered the data transmission throughput performance under multiple variables, i.e., number of UAVs (N), number of data L (), overlap degree of data ( where represents the number of overlap data in each UAVs), and the border length of the scenario. It should be pointed out that, for each set of fixed parameters, the simulator will perform 100 reruns of algorithms. In each rerun, the simulator randomly generated different coordinates of all UAVs, and then the k-mean clustering algorithm was adopted to control the density of node distribution, which made the network topology connectivity and uniformity better. This prevents UAVs from being too concentrated or too dispersed, which is consistent with the actual flight formation characteristics.
According to the random generation mechanism in the simulator, the performance results are clearly different at each run. Thus, given a set of parameters, we analyzed the statistics of 100 reruns of algorithms and took reasonable values for characterization under current parameters. We selected the statistics considering UAV amount and overlapping degree, and calculated the mean, variance and confidence interval of the statistics. Here, the confidence level is set to be 0.95.
In Table 1 and Table 2, we can see that, given every set of fixed parameters, the performance distribution of the 100 reruns approximates a basic normal distribution, and there is not too much fluctuation near the mean value. For example, in Table 1, when , the mean value, variance value and confidence interval of the statistics are 70.77 Mbps, 8.99 Mbps and (68.98, 72.55) (Mbps), respectively. Because of the confidence level setting, we know that 95% of the statistics only has a maximum of about 1.8 Mbps deviation comparing to the mean value, which is quite low. In fact, all other statistical analyses fit this feature. Therefore, we take the mean value as the result of 100 reruns, which can both reflect the simulation effect and avoid the huge deviation of the single-run.
5.1. Basic Performance
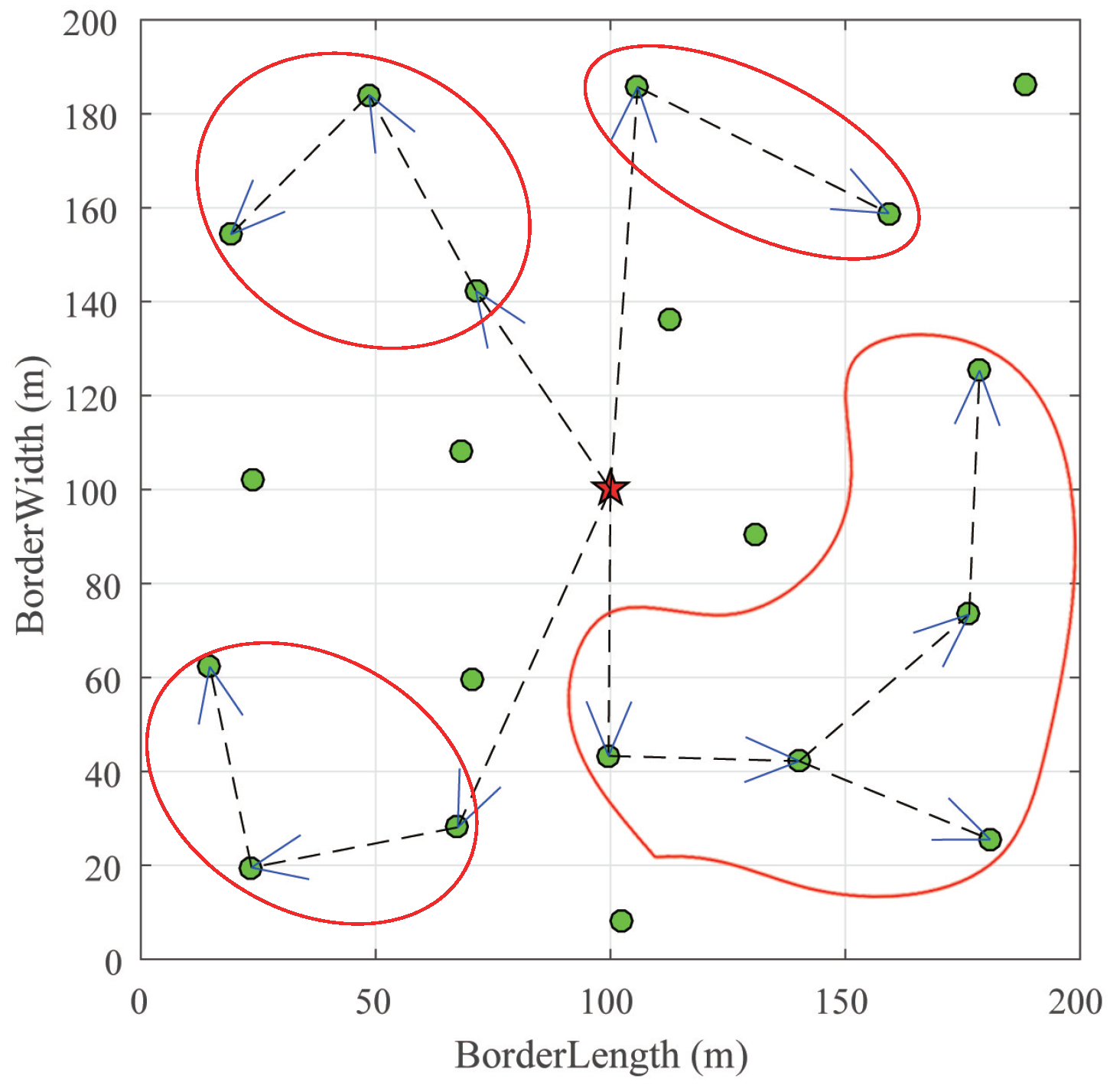
Figure 2 shows a diagram form of data 1’s transmission under coalition game model using CO-CSA. It can be seen that the UAVs containing the requirement of data 1 finally form four coalitions, and the central control UAV transmits data through the multi-hop mechanism. From the diagram, there is no long-distance UAV-to-UAV link, which proves that the proposed model can effectively avoid high data transmission loss caused by long transmission path. This is consistent with the practical meaning of the system model.
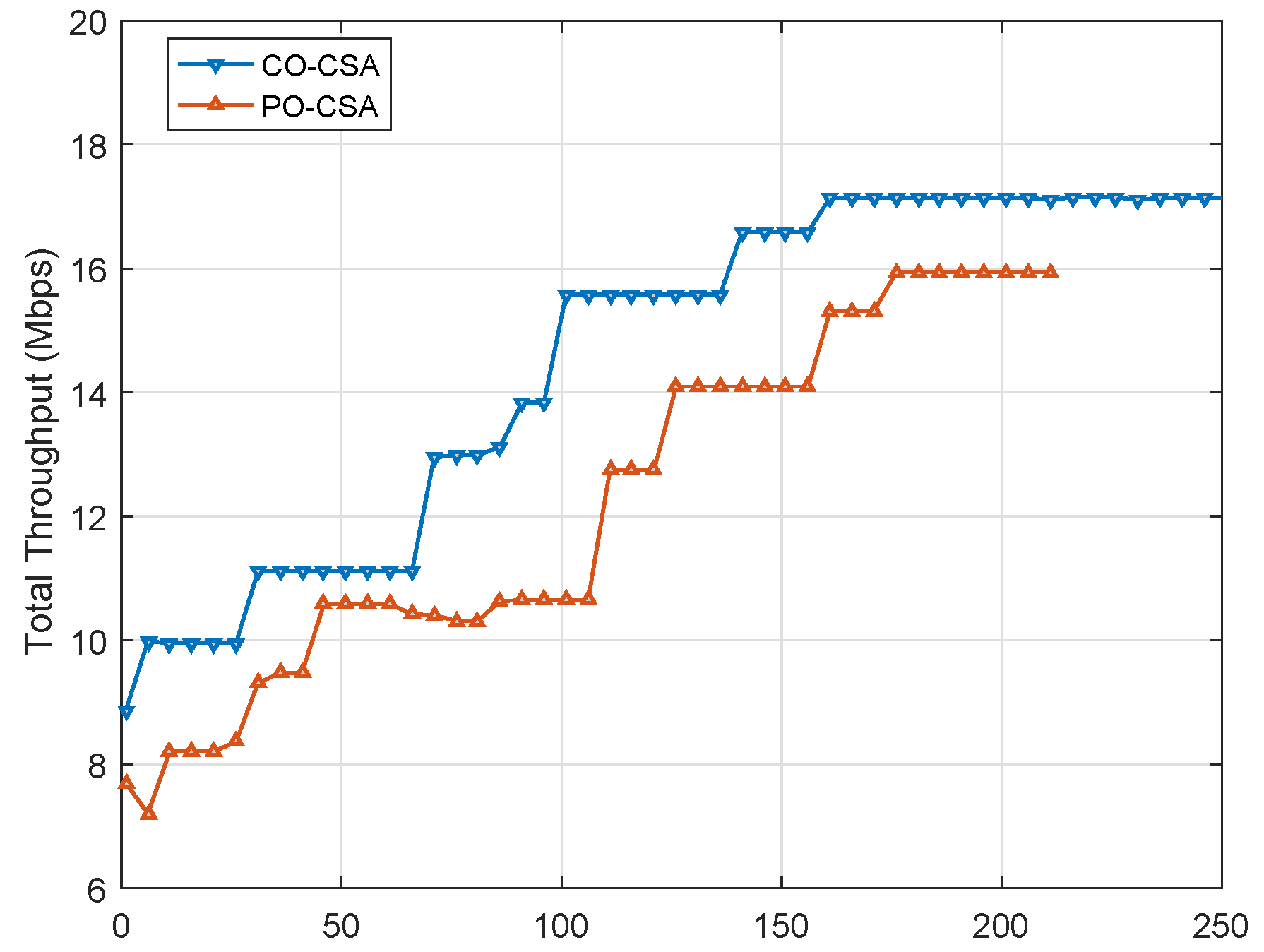
Figure 3 shows the convergence curves of CO-CSA and PO-CSA, suggesting that, by using proposed multi-UAV cooperative transmission approach based on group-buying, the game model can finally converge to a stable state.
5.2. Different Orders and Contrast Algorithms
In this subsection, we adopt a contrast coalition selection algorithm called Onetime-CSA, which only considers each UAV’s overall data packet and forms coalition partitions one time without considering each data content. The algorithm without coalition formation is also designed as a comparison method. In no coalition formation algorithm, there is no relay among UAVs, and all data transmission is carried out through the direct links with the central UAV. In addition, the throughput upper bound is defined, which assumes that there exists no energy loss in UAV-to-UAV links. By designing these comparison algorithms, we evaluate the performance of the model based on the proposed approach in different orders and contrast algorithms. When a comparison is preformed with one parameter, we set other parameters as specific values to facilitate the comparison.
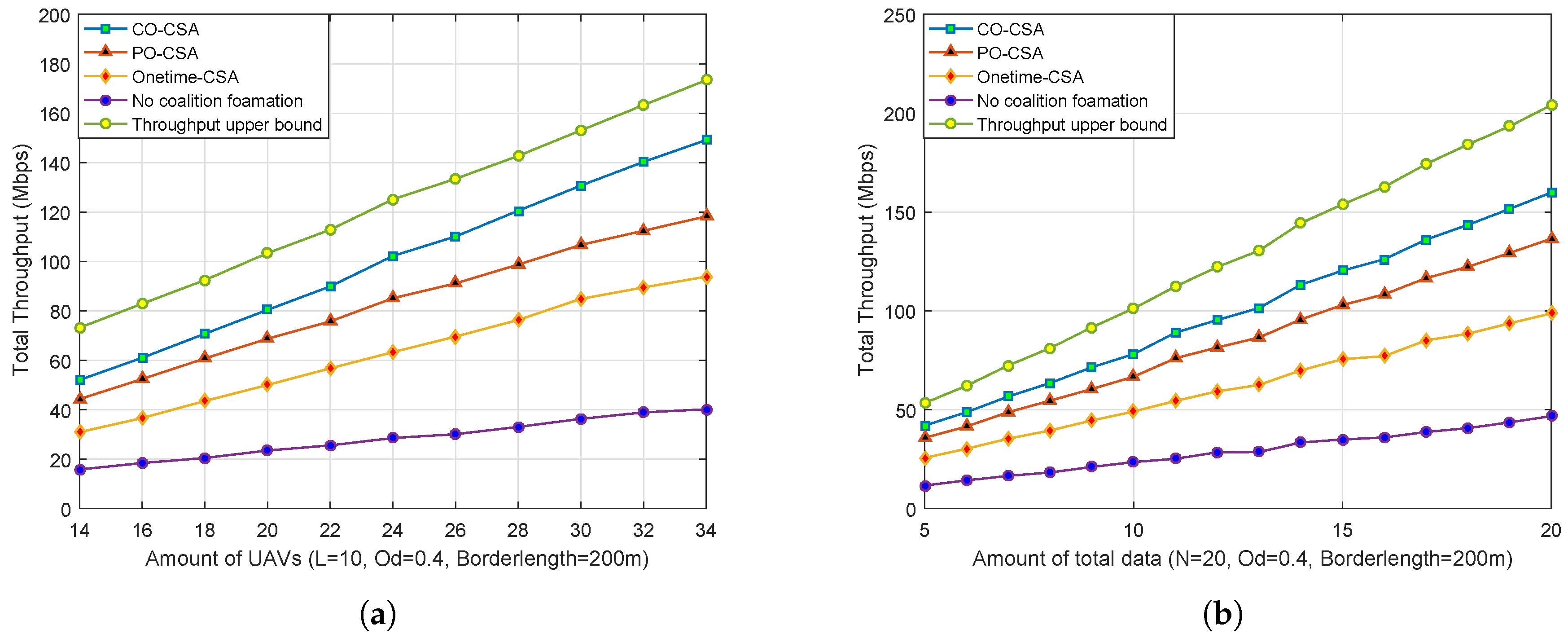
It can be seen In Figure 4 that, as the number of UAVs and the data length increase, the data throughput will increase. The main reason is that, given the setting of remaining parameters, increase the UAV amount, data length or the overlap degree will directly lead to an improvement in the total data requirement, which is actually the ideal data throughput.
In Figure 4a, we can find that CO-CSA achieves at least 54.0% higher data throughput than Onetime-CSA considering amount of UAVs, while PO-CSA achieves at least 25.6% higher data throughput than Onetime-CSA. The main reason is that UAVs in coalitions have a greater probability and a stronger desire to leave the current coalition in search of better performance owing to the definition of coalition selection mechanism. In PO-CSA, however, UAVs are likely to be stuck with coalition members, because leaving the coalition could reduce profit for other members of the coalition. Moreover, in CO-CSA, since the potential function refers to the overall throughput of the system model, the algorithm with designed utility function can behave much better than PO-CSA. It is consistent with the description of Theorem 3. In addition, in Figure 4b, CO-CSA and PO-CSA can achieve at least 59.2% and 35.7% higher data throughput, respectively, than Onetime-CSA considering total data length. The analysis is the same as above.
In fact, when other variables are fixed, number of UAVs and data length can directly affect overlap degree. Therefore, we executed a comparative analysis of algorithm performances considering overlap degree of data. It can be seen intuitively in Figure 5a that, as the overlap degree of data increases, CO-CSA can achieve at least 34.5% higher data throughput than Onetime-CSA, while PO-CSA can achieve at least 17.6% higher data throughput than Onetime-CSA. The performance of CO-CSA is also better than PO-CSA (analysis is the same as above). In summary, It shows the system model under coalition game framework can be well solved and the effectiveness of our proposed approaches is testified.
In the following, we consider the relationships between total data throughput and border length, while UAVs’ data overlap degree is fixed. As shown in Figure 5b, the performance of CO-CSA and PO-CSA increases at least by 41.5% and 16.9% compared to Onetime-CSA, respectively. It should be pointed out that, when the border length of the scenario is small, both proposed algorithms can achieve high data throughput. In particular, the performance of CO-CSA is even close to the throughput upper bound. However, as the border length of the scenario reaches a certain value, the performance of the proposed approaches drops sharply, but is still more efficient than the comparison algorithms. We found that the characteristics of the channel model explain the phenomenon. Under the setting parameters, when the distance between UAVs is 64 m, the transmission probability is only 50%. When it becomes more than about 100 m, the quality of UAV-to-UAV links become so poor that they cannot perform the transfer task. Under the premise of fixed number of UAVs, the increase of the border length in scenario makes it impossible to maintain the proper distance of among UAVs, leading to the overload of our system model.
5.3. Convergence Performance
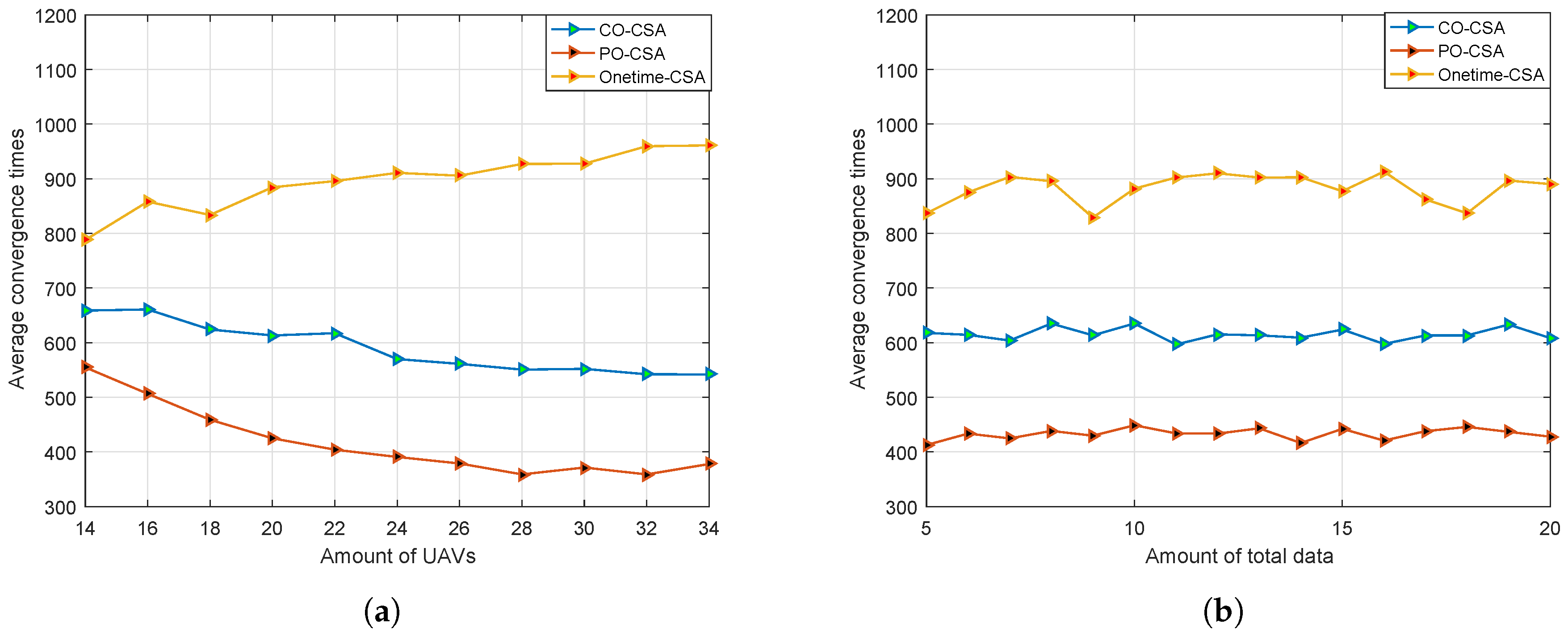
We analyzed the effects of CO-CSA and PO-CSA on the system model. Next, we compared the convergence performance of both algorithms. In each algorithm, we set one loop, which all UAVs traversed one time. When the UAV strategy in the three-round loop remains unchanged, the algorithm is considered to converge. Then, the average convergence times is defined to characterize the convergence performance.
To make a better comparison, we also added the comparison algorithm described in above. The upper bound of the iterations was set to 1000. Owing to similar results, we present the average convergence times of the algorithm considering the number UAVs and total data length. To avoid contingency, simulations randomly generate the position of each UAV and data content given the specified overlap degree. An average calculation of 100 reruns was carried out. In Figure 6a,b, it is shown that, compared with the contrast algorithm, both algorithms can converge the model to stable state in shorter times, wherein the convergence times of PO-CSA is on average 50.9% less than that of CO-CSA, which is consistent with the description in the previous section.
5.4. Discussion
In summary, we have drawn several conclusions: (1) The proposed CO-CSA and PO-CSA can accurately reflect the designed coalition selection mechanism, and prove the existence of the stable solution of problem . (2) Compared to CO-CSA, with which the optimal solution of can be obtained, PO-CSA can converge the problem to the stable partition solution more quickly, but at the same time has reduced performance. (3) Using resource allocation optimization method based on distributed data content, we can accurately describe the formations of UAV and the data transmission manner, and finally obtain higher data throughput of the system model.
We studied the data transmission mechanism under the given deployment. The optimization scheme is given under static deployment, and the timeliness of the decision becomes very important in a dynamic and volatile environment. Therefore, an efficient dynamic decision making methods is required urgently.
An extensive approach is to introduce cloud technology [33]. By uploading environmental information to the cloud and receiving decision results back after the cloud finishes calculations, the central UAV can make efficient decisions without consuming extra time and energy. However, a rapidly changing disaster or military scenario requires a stronger self-decision capability. Motivated by the application of reinforcement learning (RL) to solve the problem of anti-jamming communications in dynamic jamming environment in [34], we realize that RL can effectively help UAVs to perceive and learn the current environment, and gradually make the self-decision according to the environment. All these thoughts and existing technologies provide a prospect for our future work, and lay a good foundation to achieve efficient UAV formation control and swarm intelligence.
6. Conclusions
We proposed a resource allocation optimization method based on distributed data content in a Flying Ad-hoc network (FANET), which was constructed as a coalition game framework. Firstly, we investigated a novel mechanism of data transmission to study inner coalition structure. Then, a resource allocation optimization based on group buying was presented for coalition forming. The game was classified into graph game and coalition formation game (CFG), and both were proven to have stable solutions through the design of utility function and network formation algorithm. Meanwhile, performance comparisons were analyzed using CO-CSA and PO-CSA. The proposed PO-CSA can converge the problem to the stable partitions more quickly, while, in the CO-CSA, our model can obtain an optimal solution. The simulation results show that the designed data transmission and coalition formation mechanism achieved higher performance for our system model. The results show that, by using the proposed resource allocation optimization method based on distributed data content, we can accurately describe the formations of UAV and the data transmission manner, and finally obtain higher data throughput of the system model. This work effectively improves the transmission efficiency in UAV-to-UAV communication, which is of great significance in detection and surveillance. Combined with cloud technology and reinforcement learning, this work can play a more practical and effective role in dynamic decision making and formation control in multi-UAV communication networks.
Author Contributions
Conceptualization, L.R.; Formal analysis, Y.Z. and D.L.; Investigation, Q.G. and X.Z.; Validation, J.C.; Visualization, J.C., Q.G. and X.Z.; Writing—original draft, L.R.; and Writing—review and editing, L.R., Y.Z. and D.L.
Funding
This work was supported by the National Natural Science Foundation of China under Grant Nos. 61771488, 61671473 and 61801492; the Natural Science Foundation for Distinguished Young Scholars of Jiangsu Province under Grant No. BK20160034; and the Guang Xi Universities Key Laboratory Fund of Embedded Technology and Intelligent System (Guilin University of Technology).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Zeng, Y.; Zhang, R.; Teng, J.L. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Liu, D.; Xu, Y.; Wang, J.; Xu, Y.; Anpalagan, A.; Wu, Q.; Wang, H.; Shen, L. Self-organizing relay selection in UAV communication networks: A matching game perspective. IEEE Wirel. Commun. 2018, arXiv:1805.09257v1. [Google Scholar]
- Bekmezci, İ.; Sahingoz, O.K.; Temel, Ş. Flying ad-hoc networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Ruan, L.; Wang, J.; Chen, J.; Xu, Y.; Yang, Y.; Jiang, H.; Zhang, Y.; Xu, Y. Energy-efficient multi-UAV coverage deployment in UAV networks: A game-theoretic framework. China Commun. 2018, 15, 194–209. [Google Scholar] [CrossRef]
- Xu, Y.; Ren, G.; Chen, J.; Luo, Y.; Jia, L.; Liu, X.; Yang, Y.; Xu, Y. A one-leader multi-follower bayesian-Stackelberg game for anti-jamming transmission in UAV communication networks. IEEE Access 2018, 6, 21697–21709. [Google Scholar] [CrossRef]
- Zou, Y.; Jiang, X.; Yan, P.; Zhu, J. Next-generation unmanned aerial vehicle (UAV) cooperative communications. J. Nanjing Univ. Posts Telecommun. Nat. Sci. Ed. 2017, 37, 43–51. [Google Scholar] [CrossRef]
- Fang, T.; Tian, H.; Zhang, X.; Yang, Y.; Zhang, Y.; Xu, Y. Location-aware emergency content delivery in UAV-assisted networks: A game-theoretic approach. IEEE Access. under major revision.
- Thammawichai, M.; Baliyarasimhuni, S.P.; Kerrigan, E.C.; Sousa, J. Optimizing communication and computation for multi-UAV information gathering applications. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 601–615. [Google Scholar] [CrossRef]
- Fan, R.; Cui, J.; Jin, S.; Yang, K.; An, J. Optimal node placement and resource allocation for UAV relaying network. IEEE Commun. Lett. 2018, 22, 808–811. [Google Scholar] [CrossRef]
- Lyu, J.; Zeng, Y.; Zhang, R.; Teng, J.L. Placement optimization of UAV-mounted mobile base stations. IEEE Commun. Lett. 2017, 21, 604–607. [Google Scholar] [CrossRef]
- Say, S.; Inata, H.; Liu, J.; Shimamoto, S. Priority-based data gathering framework in UAV-assisted wireless sensor networks. IEEE Sens. J. 2016, 16, 5785–5794. [Google Scholar] [CrossRef]
- Ruan, L.; Chen, J.; Guo, Q.; Jiang, H.; Zhang, Y.; Liu, D. A coalition formation game approach for efficient cooperative multi-UAV deployment. Preprints 2018. [Google Scholar] [CrossRef]
- Yang, D.; Xue, G.; Zhang, X. Group buying spectrum auctions in cognitive radio networks. IEEE Trans. Veh. Technol. 2017, 66, 810–817. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, Y.; Anpalagan, A. Context-aware group buying in ultra-dense small cell networks: Unity is strength. arXiv, 2018; arXiv:1807.08426v1. [Google Scholar]
- Saad, W.; Han, Z.; Debbah, M.; Hjørungnes, A.; Başar, T. Coalitional game theory for communication network. IEEE Signal Process. Mag. Spec. Issue Game Theory 2009, 26, 77–97. [Google Scholar] [CrossRef] [Green Version]
- Ruan, L.; Chen, J.; Qiu, Y.; Liu, X.; Zhang, Y.; Zhu, X.; Xu, Y. Context-aware group buying in D2D networks: An overlapping coalition formation game approach. In Proceedings of the 2017 IEEE 17th International Conference on Communication Technology (ICCT), Chengdu, China, 27–30 October 2017; pp. 142–149. [Google Scholar]
- Pinto, L.R.; Moreira, A.; Almeida, L.; Rowe, A. Characterizing multihop aerial networks of COTS multirotors. IEEE Trans. Ind. Inform. 2017, 13, 898–906. [Google Scholar] [CrossRef]
- Parrot, A.R. Drone 2. Available online: http://ardrone2.parrot.com (accessed on 21 January 2016).
- Wang, T.; Song, L.; Han, Z. Coalitional graph games for popular content distribution in cognitive radio VANETs. IEEE Trans. Veh. Technol. 2013, 62, 4010–4019. [Google Scholar] [CrossRef]
- Arcaute, E.; Johari, R.; Mannor, S. Local dynamics for network formation games. In Proceedings of the 2008 46th Annual Allerton Conference on Communication, Control, and Computing, Urbana-Champaign, IL, USA, 23–26 September 2008. [Google Scholar]
- Wang, T.; Song, L.; Han, Z.; Saad, W. Overlapping coalition formation games for emerging communication networks. IEEE Netw. 2013, 2016, 46–53. [Google Scholar] [CrossRef]
- Hamilton, J. Game Theory: Analysis of Conflict. by R. B. Myerson. Managerial Decis. Econ. 2010, 13, 369. [Google Scholar] [CrossRef]
- Bogomolnaia, A.; Jackson, M.O. The stability of hedonic coalition structures. Games Econ. Behav. 2002, 38, 201–230. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, Y.; Wu, Q. Context awareness group buying in D2D networks: A coalition formation game-theoretic approach. IEEE Trans. Veh. Techn. Unpublished work. [CrossRef]
- Bala, V.; Goyal, S. Noncooperative model of network formation. Econometrica 2000, 68, 1181–1230. [Google Scholar] [CrossRef]
- Apt, K.R.; Witzel, A. A generic approach to coalition formation. Int. Game Theory Rev. 2009, arXiv:0709.0435v3 [cs.GT]11, 347–367. [Google Scholar] [CrossRef]
- Monderer, D.; Shapley, L.S. Potential games. Games Econ. Behav. 1996, 14, 124–143. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, J.; Wu, Q.; Anpalagan, A.; Yao, Y.D. Opportunistic spectrum access in cognitive radio networks: Global optimization using local interaction games. IEEE J. Sel. Top. Signal Process. 2012, 6, 180–194. [Google Scholar] [CrossRef]
- Vcking, B. Congestion games: Optimization in competition. In Proceedings of the Second ACiD Workshop, Durham, UK, 18–20 September 2006; pp. 9–20. [Google Scholar]
- Xu, Y.; Wang, J.; Wu, Q.; Anpalagan, A.; Yao, Y.D. Opportunistic spectrum access in unknown dynamic environment: A game-theoretic stochastic learning solution. IEEE Trans. Wirel. Commun. 2012, 11, 1380–1391. [Google Scholar] [CrossRef]
- Li, P.; Duan, H. A potential game approach to multiple UAV cooperative search and surveillance. Aerosp. Sci. Technol. 2017, 68, 403–415. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, J.; Wu, Q.; Zheng, J.; Shen, L.; Anpalagan, A. Dynamic spectrum access in time-varying environment: Distributed learning beyond expectation optimization. IEEE Trans. Commun. 2017, 65, 5305–5318. [Google Scholar] [CrossRef]
- Feng, Z.; Qiu, C.; Feng, Z.; Wei, Z.; Li, W.; Zhang, P. An effective approach to 5G: Wireless network virtualization. IEEE Commun. Mag. 2015, 53, 53–59. [Google Scholar] [CrossRef]
- Liu, X.; Xu, Y.; Jia, L.; Wu, Q.; Anpalagan, A. Anti-jamming Communications Using Spectrum Waterfall: A Deep Reinforcement Learning Approach. IEEE Commun. Lett. 2018, 22, 998–1001. [Google Scholar] [CrossRef]
Figure 1.
A diagram of data multi-hop transmission considering coalition formation in UAV networks.

Figure 2.
A diagram form of data 1’s allocation and transmission under coalition game model.

Figure 3.
Convergence curve of the proposed approach with different orders.

Figure 4.
Performance comparisons of algorithms based on (a) UAV amount and (b) total data length.

Figure 5.
Performance comparison of algorithms based on (a) data overlap degree and (b) border length of scenario.
Figure 5.
Performance comparison of algorithms based on (a) data overlap degree and (b) border length of scenario.

Figure 6.
The average convergence times of different numbers of users and data with different methods. (a) The average convergence times considering UAV amount. (b) The total data throughout considering border length of scenario.
Figure 6.
The average convergence times of different numbers of users and data with different methods. (a) The average convergence times considering UAV amount. (b) The total data throughout considering border length of scenario.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Statistical analysis considering amount of UAVs ( m).
| Number of UAVs (N) | Mean (Mbps) | Variance (Mbps) | Confidence Interval (Mbps) |
|---|---|---|---|
| 14 | 52.07 | 8.74 | (50.33, 53.80) |
| 16 | 61.02 | 8.30 | (59.38, 62.67) |
| 18 | 70.77 | 8.99 | (68.98, 72.55) |
| 20 | 70.77 | 9.96 | (78.45, 82.40) |
| 22 | 89.93 | 10.16 | (87.92, 91.95) |
| 24 | 102.23 | 11.23 | (100.00, 104.46) |
| 26 | 110.14 | 11.32 | (107.90, 112.39) |
| 28 | 120.55 | 11.65 | (118.24, 122.87) |
| 30 | 130.73 | 12.35 | (128.28, 133.18) |
| 32 | 140.32 | 12.29 | (137.88, 142.76) |
| 34 | 149.16 | 12.70 | (146.64, 151.68) |
Table 2.
Statistical analysis considering overlap degree of data ( m).
| Overlap Degree () | Mean (Mbps) | Variance (Mbps) | Confidence Interval (Mbps) |
|---|---|---|---|
| 0.3 | 35.81 | 6.78 | (34.46, 37.15) |
| 0.35 | 45.75 | 8.52 | (44.06, 47.44) |
| 0.4 | 56.79 | 9.82 | (54.84, 58.74) |
| 0.45 | 69.18 | 9.10 | (67.37, 70.99) |
| 0.5 | 78.04 | 9.71 | (76.11, 79.97) |
| 0.55 | 93.99 | 10.12 | (91.98, 96.00) |
| 0.6 | 106.93 | 9.50 | (105.05, 108.82) |
| 0.65 | 119.03 | 10.51 | (116.94, 121.12) |
| 0.7 | 133.84 | 11.03 | (131.65, 136.03) |
| 0.75 | 147.02 | 10.84 | (144.87, 149.17) |
| 0.8 | 161.34 | 10.28 | (159.30, 163.38) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Ruan, L.; Chen, J.; Guo, Q.; Zhang, X.; Zhang, Y.; Liu, D. Group Buying-Based Data Transmission in Flying Ad-Hoc Networks: A Coalition Game Approach. Information 2018, 9, 253. https://doi.org/10.3390/info9100253
AMA Style
Ruan L, Chen J, Guo Q, Zhang X, Zhang Y, Liu D. Group Buying-Based Data Transmission in Flying Ad-Hoc Networks: A Coalition Game Approach. Information. 2018; 9(10):253. https://doi.org/10.3390/info9100253
Chicago/Turabian StyleRuan, Lang, Jin Chen, Qiuju Guo, Xiaobo Zhang, Yuli Zhang, and Dianxiong Liu. 2018. "Group Buying-Based Data Transmission in Flying Ad-Hoc Networks: A Coalition Game Approach" Information 9, no. 10: 253. https://doi.org/10.3390/info9100253
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.