1. Introduction
Energy is one of the keys to the development of nations and society. Civilization is dependent on a constant, consistent supply of energy; globally, the demand for energy has been increasing consistently in parallel with growth in population and economic consumption [
1]. Stringent energy-related problems have led to an increased interest in renewable energy sources. Due to the intermittent nature of those sources, the energy production varies significantly according, for example, to the hour of the day and the period of the year. Therefore, it is necessary to store the produced energy allowing its use after production. The criteria for the selection of solutions for the storage of renewable energy are still under debate, both for stationary and mobile applications [
2].
Hydrogen is considered as an energy carrier and its chemical energy can be converted into electricity through a chemical reaction by a fuel cell. Therefore, coupling energy storage systems with renewable energy sources through an electrolyzer, which can transform electric energy into hydrogen chemical energy, is considered as a highly sustainable process of exploitation of energy [
3,
4,
5]. A good storage system should also be useful if the system is located in a remote off-grid area [
6,
7,
8], like mountainous regions [
9] or small islands [
10], as an alternative to the less-efficient and less environmentally-friendly diesel generators that are normally used in these contexts [
11,
12,
13]. For the same type of applications, Li-ion batteries are also used coupled with renewable energy sources.
The tradeoff between batteries and fuel cells is an issue not only for stationary applications, but also for mobile ones, as shown in the literature about PEMFCs (proton exchange membrane fuel cells) and electric vehicles [
14,
15]. The choice of one of these technologies for a specific application can be made taking into account different factors, such as the hydrogen source, the electricity mix or the price of the fuel, or specific application-related issues, like the weight of the system. This is the case of small and mini unmanned aerial vehicles (UAVs), also known as drones. Due to an increased interest in these devices [
16,
17,
18,
19], a large number of efforts have been dedicated to the estimation and optimization of the flying range [
20,
21].
Since the currently commercialized drones are battery fed, increasing the size of the battery could represent the easiest solution. According to some authors, however, this is not a viable solution, as the weight of the battery becomes a limiting factor [
22]. Studies on other portable power applications [
23,
24] concluded similarly that, for shorter operational times, the battery system is best, while for longer operational times the fuel cell is preferred from a weight perspective. Another explored option is the use of a fuel cell: in this case, in fact, the only limit to the flying range is given by the amount of fuel onboard. Hydrogen and methanol both represent valid alternatives as fuels for the PEM fuel cell. In both cases, the power supply system of the device becomes more complicated with respect to the use of batteries, requiring a fuel tank (for liquid methanol, or compressed hydrogen gas), auxiliary components, and in the case of the use of methanol, a reformer unit. In particular, the presence of a reformer unit determines the addition of extra weight and auxiliary components not necessary in the case of a hydrogen-powered system.
Since it is not possible to find a general solution for the energy storage, specific case studies, such as those aforementioned, have to be considered. However, when comparing batteries and fuel cells for different stationary and mobile applications, some general benefits and drawbacks can be outlined. For this reason, two alternative energy storage systems will be investigated in this work, i.e., Li-ion batteries and hydrogen coupled with PEM fuel cell-based technologies. The two technologies will be considered for both a stationary and a mobile application. In particular, the stationary system is a family house designed to have two days of self-sufficiency, while the mobile application is a coaxial octocopter having a flying time of 120 min. A cost analysis will be shown, evidencing the main contributions to the final cost of the considered devices. In addition, both systems will be investigated focusing on the energy and materials used for their production, through a life cycle assessment tool.
Both energy storage technologies showed low environmental burdens if compared to other components of the same system. Batteries have lower costs than fuel cells, and require less auxiliary components. On the other hand, fuel cell-based systems showed a better adaptability to long operating times. Starting from results on specific applications, it will be possible to obtain a wider overview of the advantages and issues of the use of both technologies.
2. Systems Description
2.1. Stationary Application: Family House Energy Storage
A family house with 3–4 inhabitants, located in the area of Turin, Italy, was considered. This area was chosen since it offers a great multiplicity of different scenarios, going from the grid-connected urban area, to small, but still grid-connected villages, up to the remote mountain lodges, located in the alpine chain, which cannot rely on grid connection. In all of these scenarios the application of a system coupling renewable energy production and storage would lead to an improvement. In the case of mountain lodges, this scenario will benefit from energy efficiency and self-sufficiency while, in urban areas, the renewable energy system will help in meeting peak electrical load demands, thus reducing risks of blackout phenomena.
Photovoltaics are the most widely applicable solution for renewable energy production in this area. For an estimation of the energy production, the irradiation data for Turin in winter, summer, and spring/autumn have been considered. The average daily irradiation has been obtained, as explained in detail in [
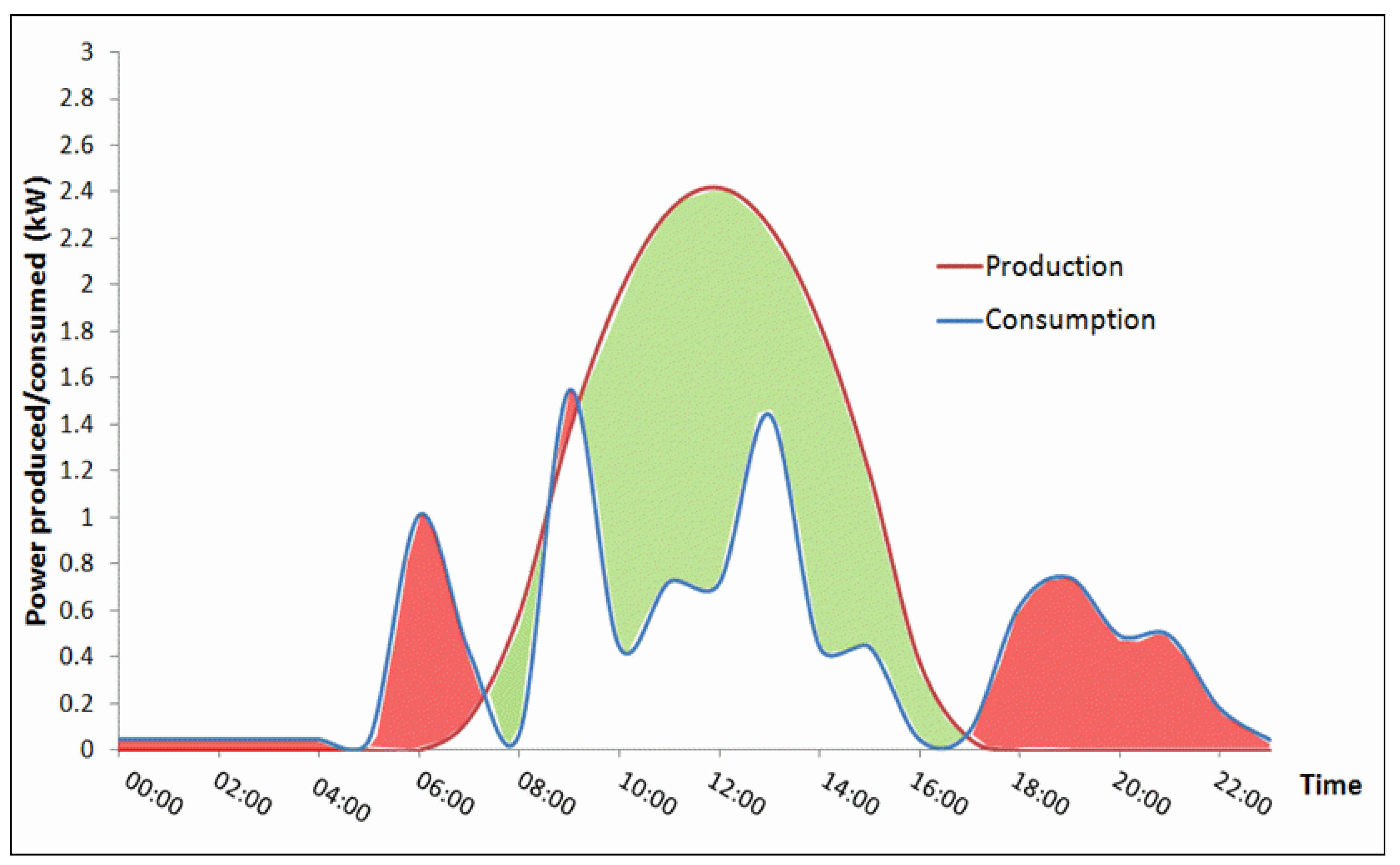
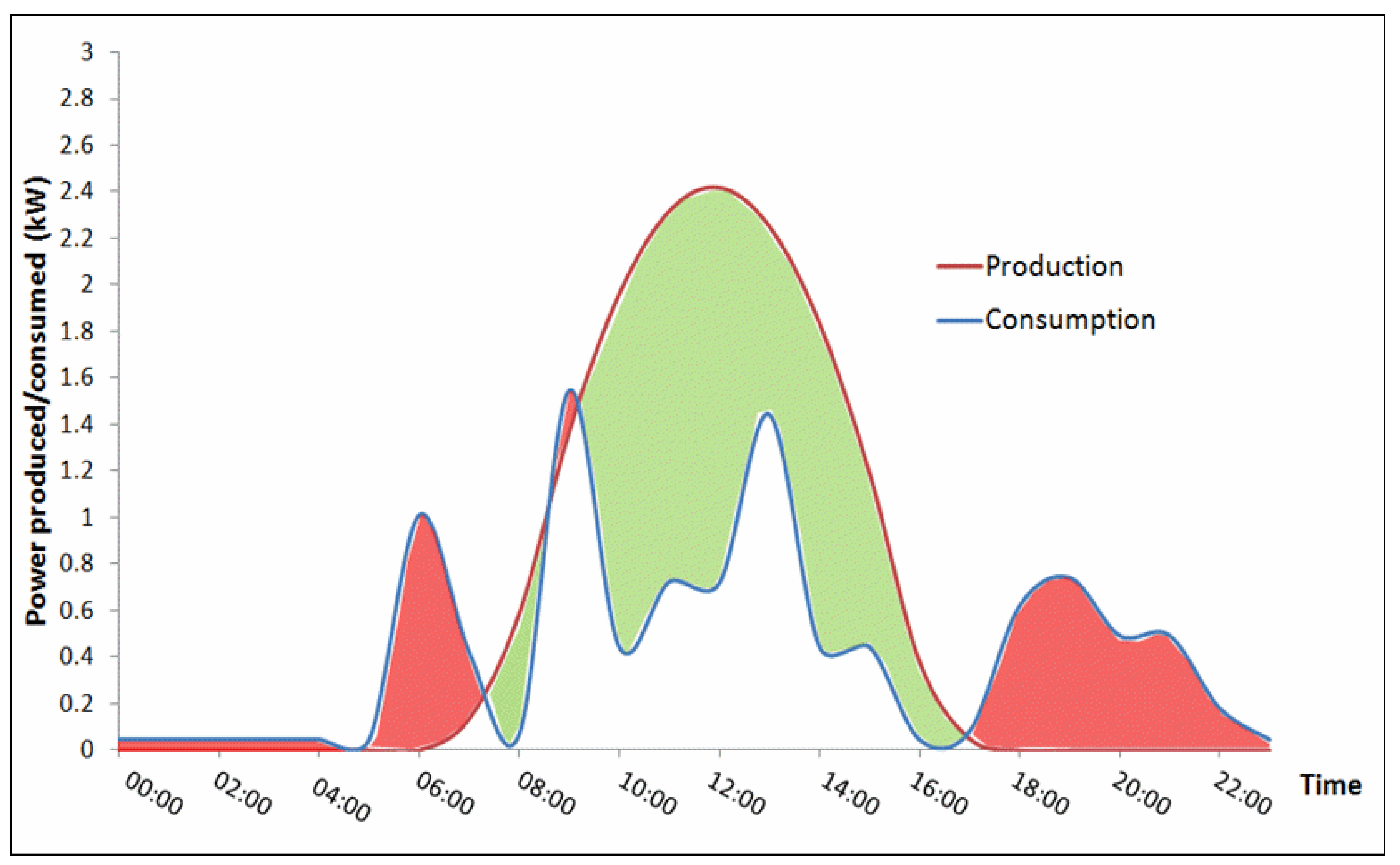
25], and power curves were calculated. To estimate the electricity consumption by the family house, load curves were estimated considering commercial electrical appliances. In
Figure 1, the estimated power consumption and production curves for the winter months are reported as a function of time. The colored areas represent the system working. In the green area, the electricity production exceeds the amount required by the load. This excess is used to recharge the batteries, in the case of the battery-based system, and to produce hydrogen through electrolysis, in the case of the fuel cell-powered system. In the red area, no or little electricity is produced with the solar panels, thus, the storage system intervenes.
On the basis of these considerations, both systems were sized for being self-sufficient for two days in the worst conditions, i.e., with the irradiation data of December. The two systems, the schemes of which are reported in
Figure 2 and
Figure 3, differ in the storage unit, which is represented by a battery pack in one case, and an electrolyzer coupled with a fuel cell system in the other case.
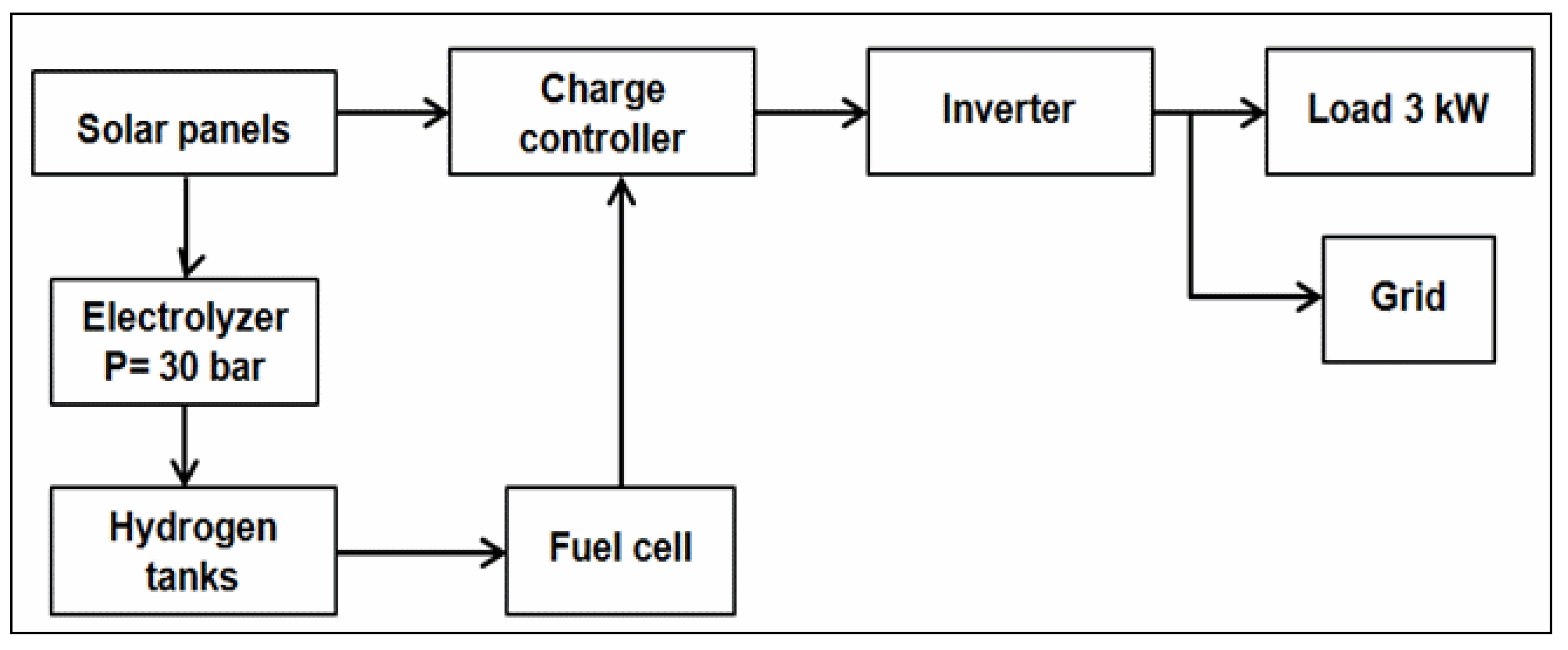
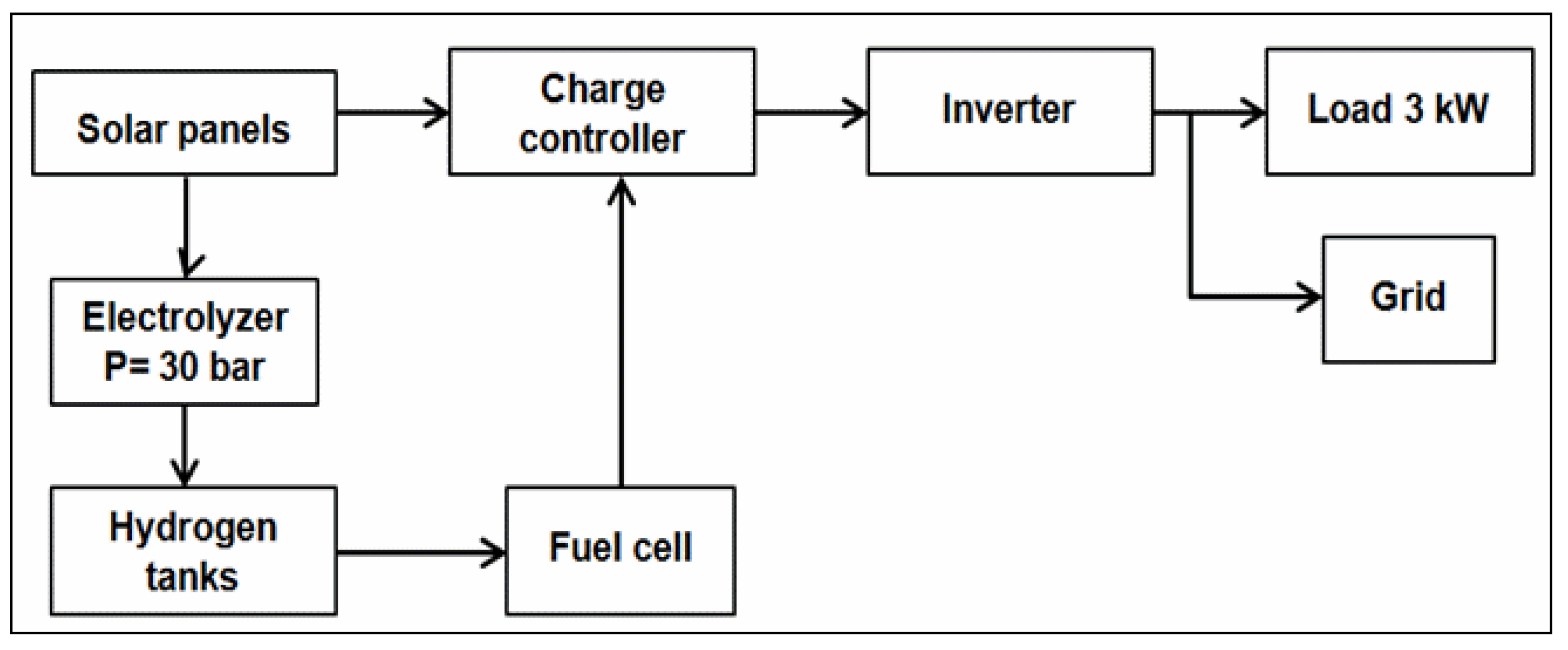
As the average daily consumption of the examined household was estimated to be 11 kWh with 3 kW maximum load, a fuel cell with a 3 kW nominal power output will be considered. The hydrogen necessary for two days of self-sufficiency is produced by an electrolyzer. In order to produce the necessary amount of hydrogen during the sunny hours of one day, a nominal power input of 5 kW is considered. Hydrogen will be stored at 30 bar, which is the pressure released by the electrolyzer, into type I aluminum tanks with an internal volume of 50 L. For two days of self-sufficiency 10 tanks are needed, but since standard cylinder bundles are composed of 12 tanks, two additional cylinders are added to the system. The hydrogen-based system needs an additional photovoltaic array because of the electrolyzer power requirements. A simplified scheme of this system is shown in
Figure 2.
The battery-based system, the scheme of which is reported in
Figure 3, is composed of 12 batteries, with 12 V and 150 Ah.
It is noteworthy that both systems schematized in
Figure 2 and
Figure 3 have the possibility of being connected to the grid, if available. This gives the possibility of conferring the extra energy produced to the grid, as well as getting this back during the night hours.
2.2. Mobile Application: UAV
In recent years the use of UAVs, traditionally related to military operations, has been gaining interest for civilian applications in different fields [
24,
25,
26]. Among these, one particularly promising application is structure health monitoring [
27,
28]. Video inspection performed by drone can also be a valid tool for the periodical inspection of lifting equipment and cranes. These inspections are, in fact, normally carried out by disassembling and putting on the ground the components to be inspected, but this procedure is expensive and time-consuming.
For this application the drone must have a flying time of at least 120 min and a high stability to allow image acquisition. Stability requirements lead to the choice of a coaxial octocopter [
29]. As far as the flying range is concerned, two power alternatives are considered: the Li-ion battery traditionally used for these devices [
24,
30] and a PEM fuel cell, as successfully demonstrated in previous works [
31,
32,
33]. The latter is not a conventional PEM fuel cell, but a lightweight one, suitable for aerospace applications [
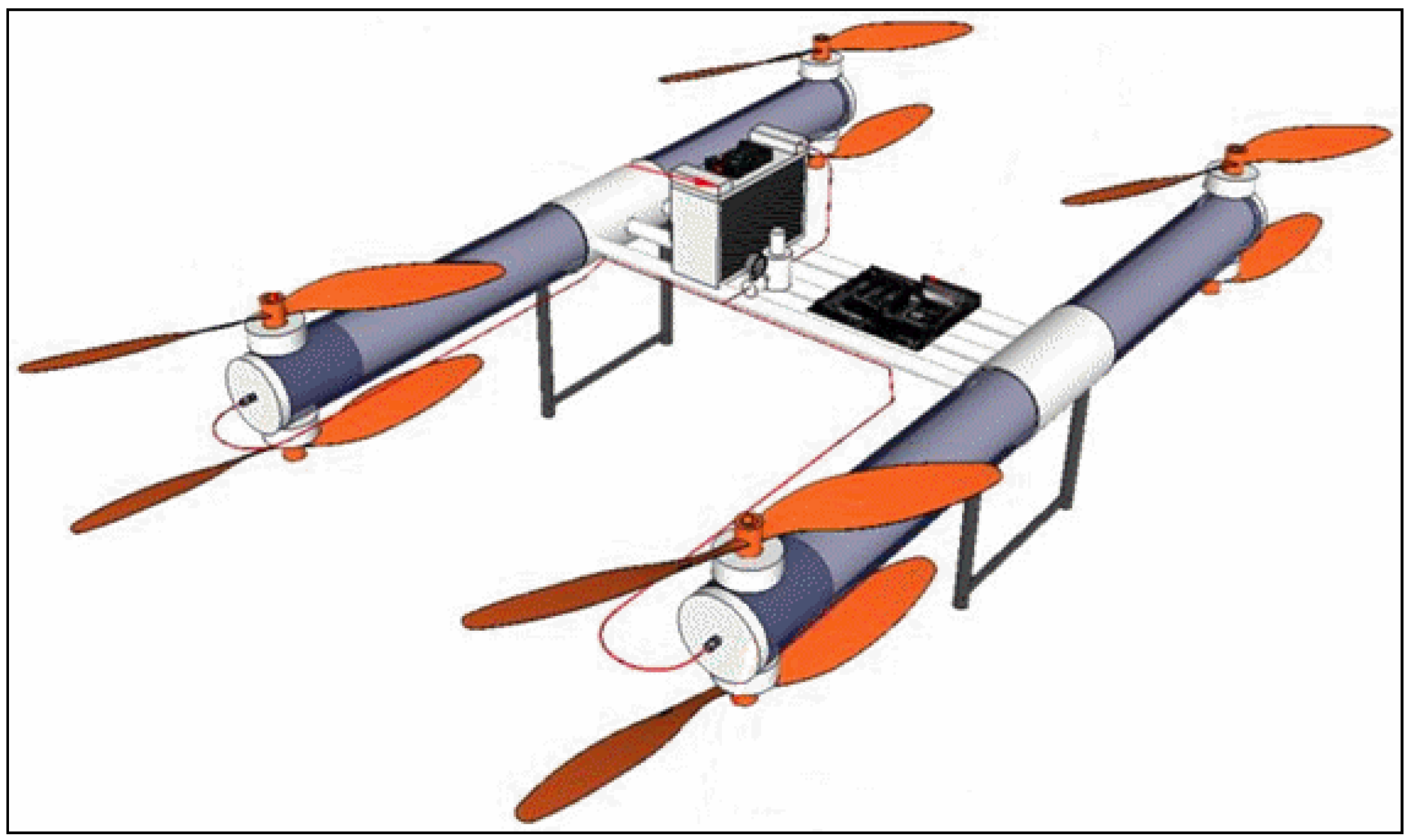
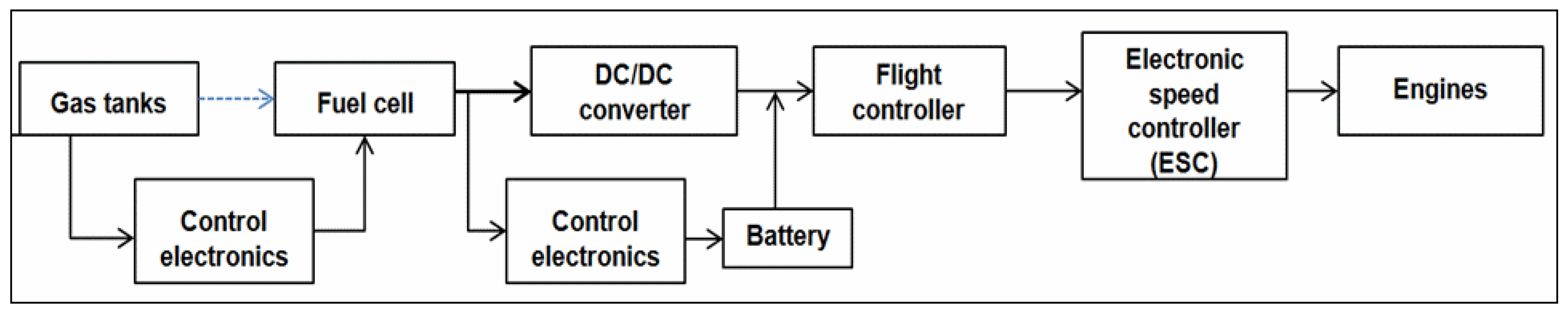
34], for which weight is a crucial issue. This also determines the need for limiting the number of auxiliary components necessary for the fuel cell to operate, which means air-cooling (no cooling liquid circuit necessary), and dry-type membranes, that do not need to be humidified. A simplified representation of the UAV fuel cell-based system is shown in
Figure 4. Aside from this PEM fuel cell-powered device, a commercial Li-ion battery-powered device was considered.
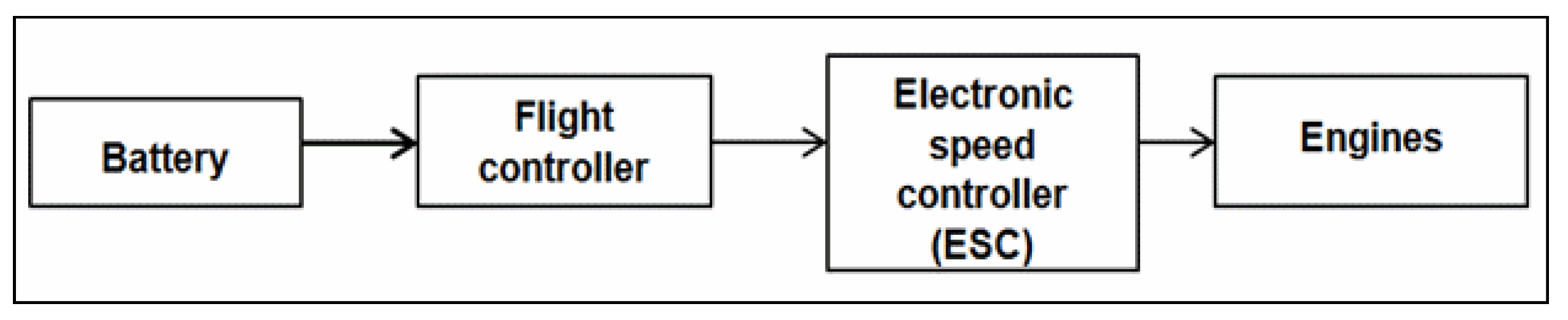
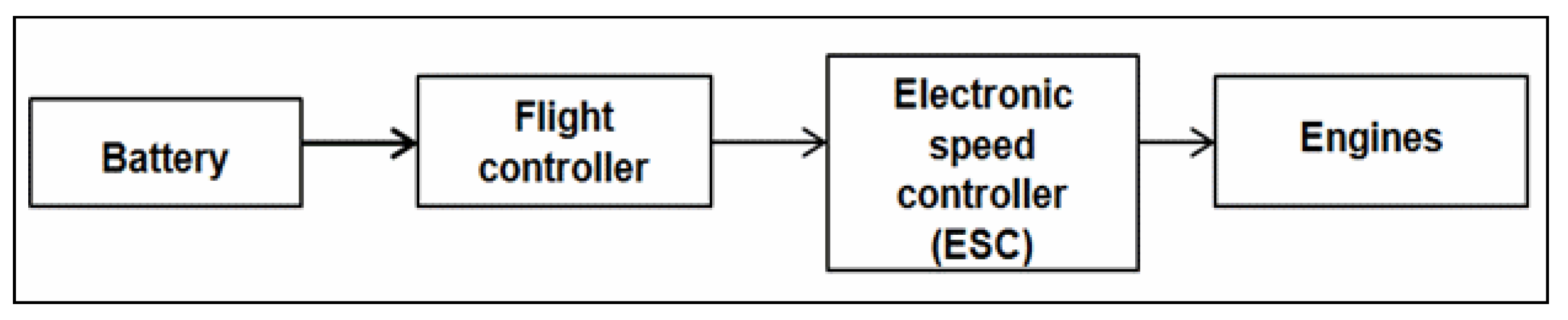
Simplified schemes of the battery-based and the fuel cell-based drones are reported in
Figure 5 and
Figure 6, respectively.
The dashed arrow in
Figure 6, going from the gas tanks to the fuel cell represents the hydrogen flow, which is regulated by the control electronics. The auxiliary components of the fuel cell system, such as air compressor, blower and solenoid valves, require a power supply of about 22 W. For this reason, an extra power must be supplied to the system, aside from the 728 W required by the drone engines (common to both systems). Thus, the two systems, although designed for the same application and size, are slightly different in the amount of power effectively supplied to the engines. As a consequence, considering 1 kW power, the battery-based system has a slightly longer flying time, with respect to the fuel cell system.
Unlike for the stationary application, for the mobile application the hydrogen production aspect has not been examined. However, considering a small electrolyzer producing 400 nl/h with a power supply equal to 2.8 kW, the amount of hydrogen necessary for the fuel cell-powered drone running for 120 min can be produced in about 250 min, with a total energy consumption of 11.8 kWh.
3. Cost Analysis
Cost can be a deciding factor in the choice between two different systems for applications. In order to identify which solutions are more competitive and the impact of the energy storage solution on the total cost of the system, a cost analysis has been performed for both stationary and mobile applications. The estimated costs of the main components for the two stationary systems are reported in
Table 1, and their distribution and total prices are shown in
Figure 7.
As can be seen from
Figure 7, although the total costs are very different for these solutions, the price distribution among the components is similar, with the energy storage unit representing more than half of the total cost for both systems. The reason is two-fold: on one hand, the high number of batteries required by the battery-powered system to guarantee two days of self-sufficiency gives a significant rise to the price, while, on the other hand, the high cost of the electrolyzer + PEM fuel cell system is, nowadays, fixed by the low market penetration of these devices. The use of gas cylinders gives another significant contribution to the cost of the hydrogen technology system.
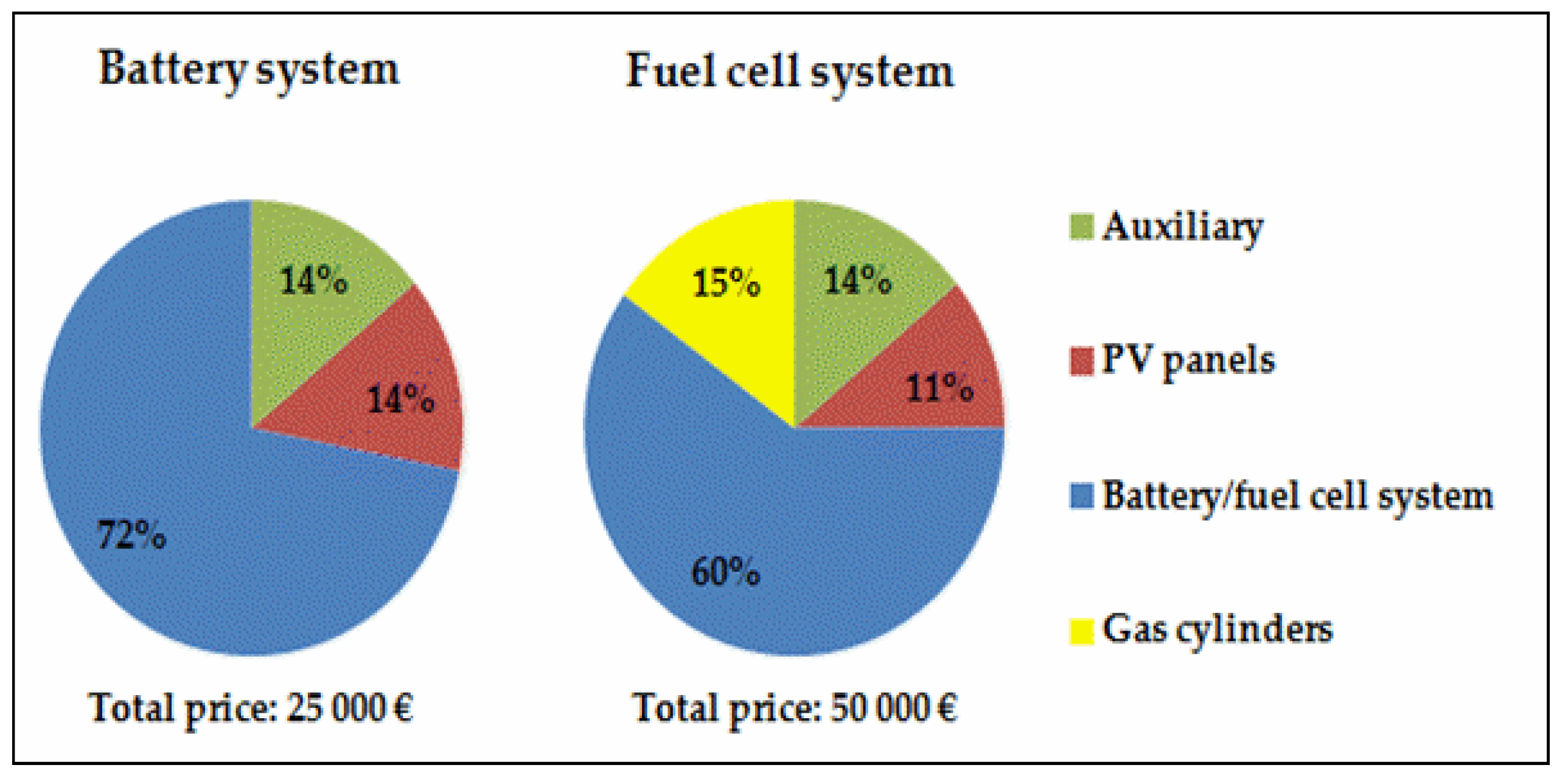
Different trends can be observed in the case of the selected mobile application, for which the costs are reported in
Table 2, and their distribution among the components is summarized in
Figure 8.
In this case, the PEM fuel cell is responsible for about half of the total cost of the fuel cell-powered drone, while the battery in the battery-powered system has a much lower impact, not only if compared to the fuel cell of the fuel cell-based mobile system, but also to the previously-presented battery-based stationary application. This is simply due to the different number of batteries required by the two applications. In the case of the UAV, a single battery is enough for a single run while, for the stationary application, 12 batteries are necessary to guarantee two days of self-sufficiency. The impact of the engines and structure of the drone to the total cost of the drone, as well as that of the control and image acquisition part, is quite different for the two systems, even if the absolute cost is obviously the same. This result indicates a very different contributions of the two energy storage methods to the total cost of the drone.
In the case of the battery-based drone, 52% of the total price is due to the engines and structure. This can be attributed to the use of carbon fiber. The production of this material is, in fact, energy- and capital-intensive. Therefore, a large effort is being done to develop new production technologies of carbon fiber, in order to significantly reduce manufacturing costs [
35]. Structure and engines represent 21% of the total price of the fuel cell-powered UAV. In this case, however, the type III gas tanks are partly made of carbon fiber and contribute to 8% of the total price of the system, suggesting the need of an improvement in composite tank manufacturing [
36].
The systems examined for the two applications show the same main critical aspect from a cost point of view: the higher impact of the fuel cell with respect to Li-ion batteries. In fact, the latter represents a mature technology already commercialized on a large scale. In particular, in the case of selected applications, battery-powered drones are already available at different prices and sizes, while for stationary application kits containing batteries, photovoltaic panels, and controllers can be purchased in a variety of power options.
The commercial situation of fuel cell technology is, at present, quite different, these products not yet being commercialized on a large scale. Their production process, which still needs improvement [
37], makes them quite expensive. If there is a market for PEM fuel cells for stationary use (e.g., small-scale CHP), when PEM fuel for mobile and aerospace applications are considered, the prices increase significantly. This is due to the use of lightweight materials and to a significantly lower diffusion on the market of this type of fuel cell, when compared to similar systems for stationary applications.
4. Life Cycle Assessment
Life cycle assessment (LCA) is an important tool to evaluate the environmental impact of a product, as described by the ISO 14040/14044 methodology [
38,
39]. LCA has been already carried out on stationary energy-storage systems on both battery-based [
40,
41] and fuel cell-based systems [
42,
43,
44]. The novelty of this study is given by a comparison between the two different solutions, sized for the same conditions for the stationary application. As far as the UAV is concerned, to our knowledge, no previous LCA studies have been reported.
4.1. Goal and Scope
The goal of this study is to obtain an overview of the potential environmental impacts of the described systems, identifying the main bottlenecks associated with the manufacturing process of corresponding components. The functional unit of an LCA study is the reference to which all of the inputs and outputs are related, thus allowing a comparison among different systems. In this study the systems examined have different applications and sizes, so a functional unit of 1 kW power supplied has been chosen.
4.2. Inventory
The data used for this LCA study have been taken from the Ecoinvent database [
45]. Components and materials composing the systems are listed in the
Table 3,
Table 4,
Table 5 and
Table 6 (left column), together with data taken from Ecoinvent (right column) to model them. All elements are rescaled on the basis of the system being examined, as explained later in detail.
4.2.1. Inventory for the Stationary Systems
The inventory for the fuel cell-based stationary system has been grouped in
Table 3The PEM fuel cell in Ecoinvent [
45], with a nominal power output of 2 kW, has been rescaled on the 3 kW PEM fuel cell of the fuel cell system. Due to the unavailability of data on alkaline electrolyzers, this device has been modeled with the same rescaled PEM fuel cell, as discussed in [
25]. The inventory for the battery-based stationary system has been grouped in
Table 4.
Even though the photovoltaic panels present in Ecoinvent [
45] have a lower watt-peak with respect to those reported in the datasheet of the panels considered for this study, they comprise of the same number of cells. It is, thus, reasonable to consider the use of a similar amount of materials for their manufacturing.
4.2.2. Inventory for the Mobile System
The inventory for the fuel cell-based UAVs is shown in
Table 5.
Since data on carbon fiber (CF) were not available in Ecoinvent [
45], polyacrylonitrile (PAN) production was considered, which is used as a precursor to obtain carbon fiber. Being that PAN is a precursor, the conversion processes of the former into carbon fiber is not accounted for and, thus, the impact of this process will be underestimated. According to a manufacturer [
46] the energy input for CF production from PAN is 72 MJ/kg, while the production of PAN requires 69.3 MJ/kg [
47]. According to another study [
48], the energy input for the overall process of CF production ranges from 286 to 704 MJ/kg. These energy input data give an idea of the potential environmental impacts of the associated processes: from these values it seems that the impact of CF production is three times higher than that of PAN fiber (or even more, according to Duflou et al. [
48]). For copper, titanium, and brass, due to their low amount, only production has been considered because the contribution of further processing is negligible. The inventory for the battery-based UAVs is shown in
Table 6.
4.3. LCA Results
LCA was performed by means of the commercial software Sima Pro 8.2 (PRé Sustainability, Amersfoort, The Netherlands) [
49]. The impact assessment method chosen was Impact 2002+ [
50]. Global warming potential (GWP) and non-renewable energy have been considered as impact categories.
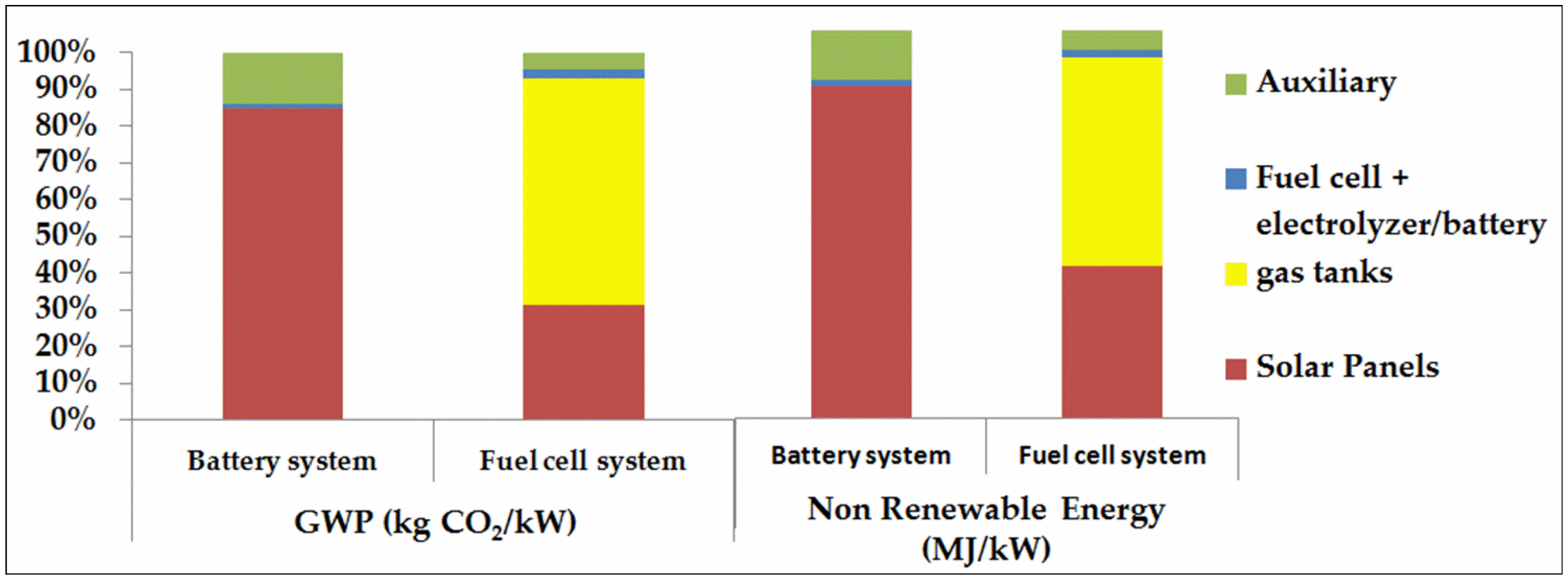
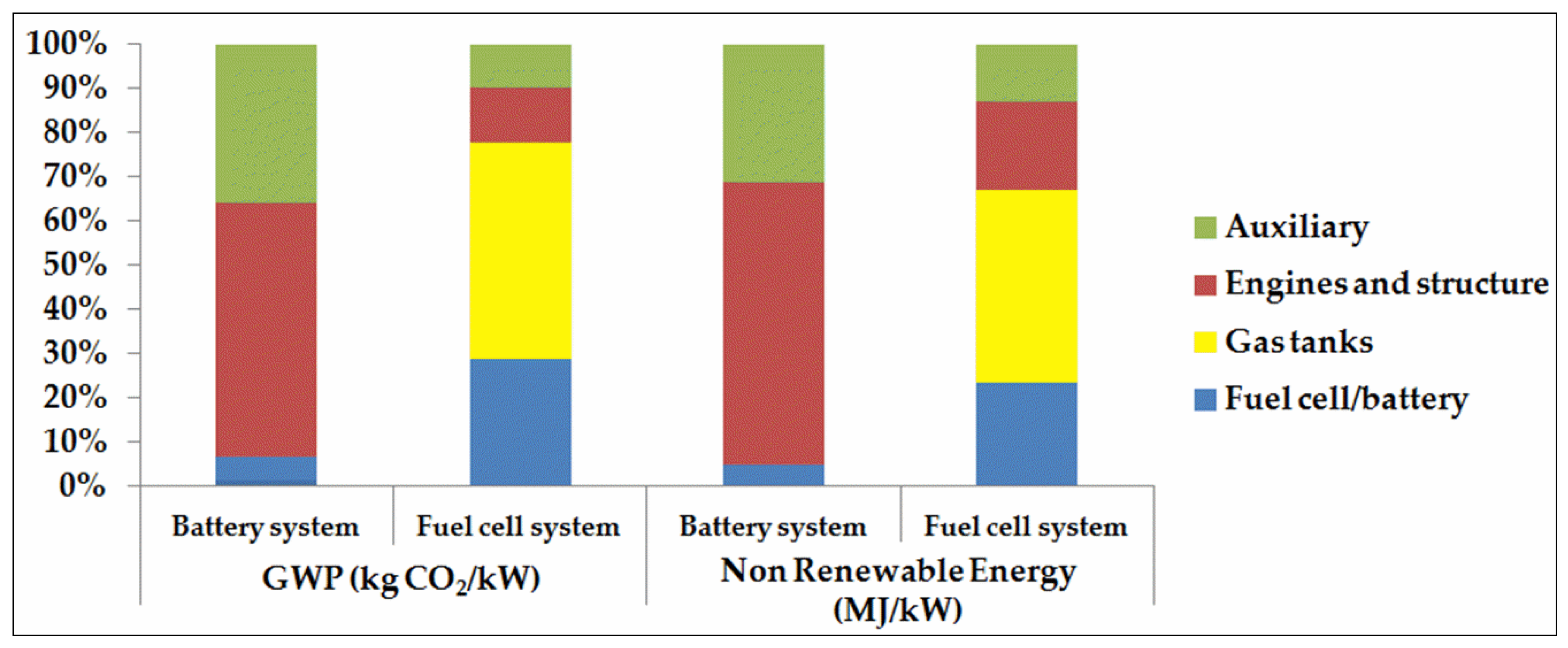
The impact assessment results for the stationary and mobile systems are reported in
Figure 9 and
Figure 10, respectively.
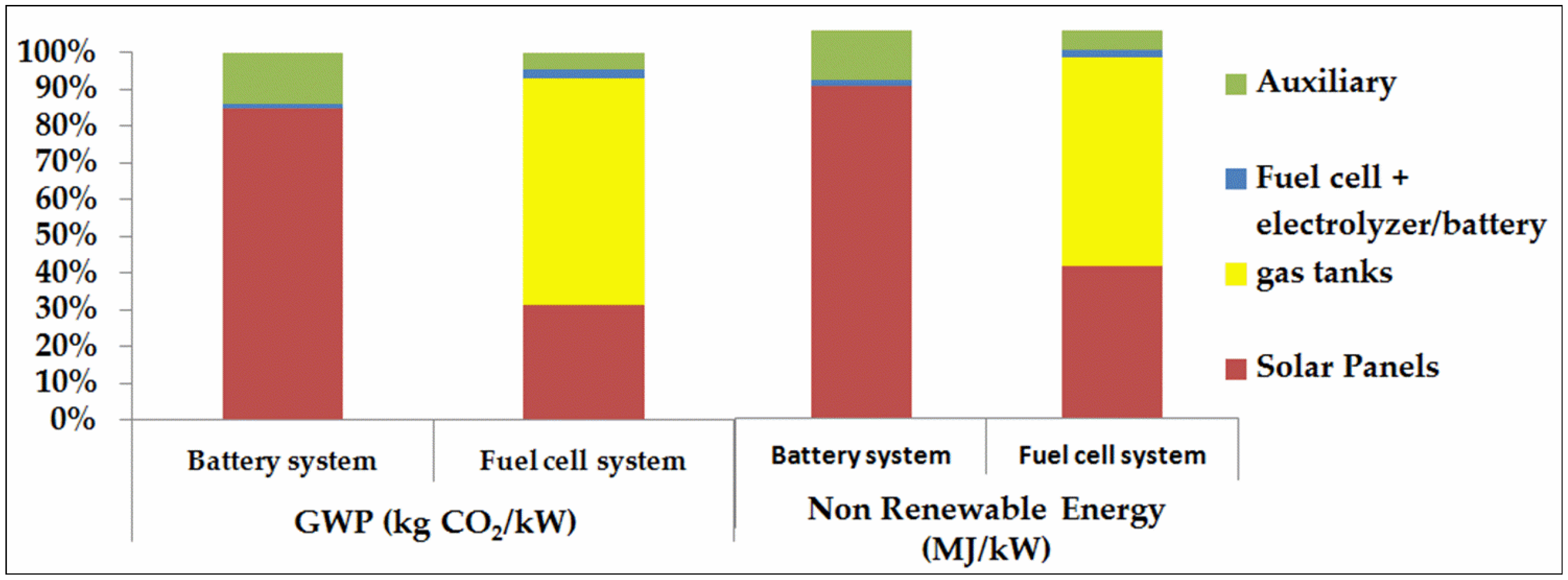
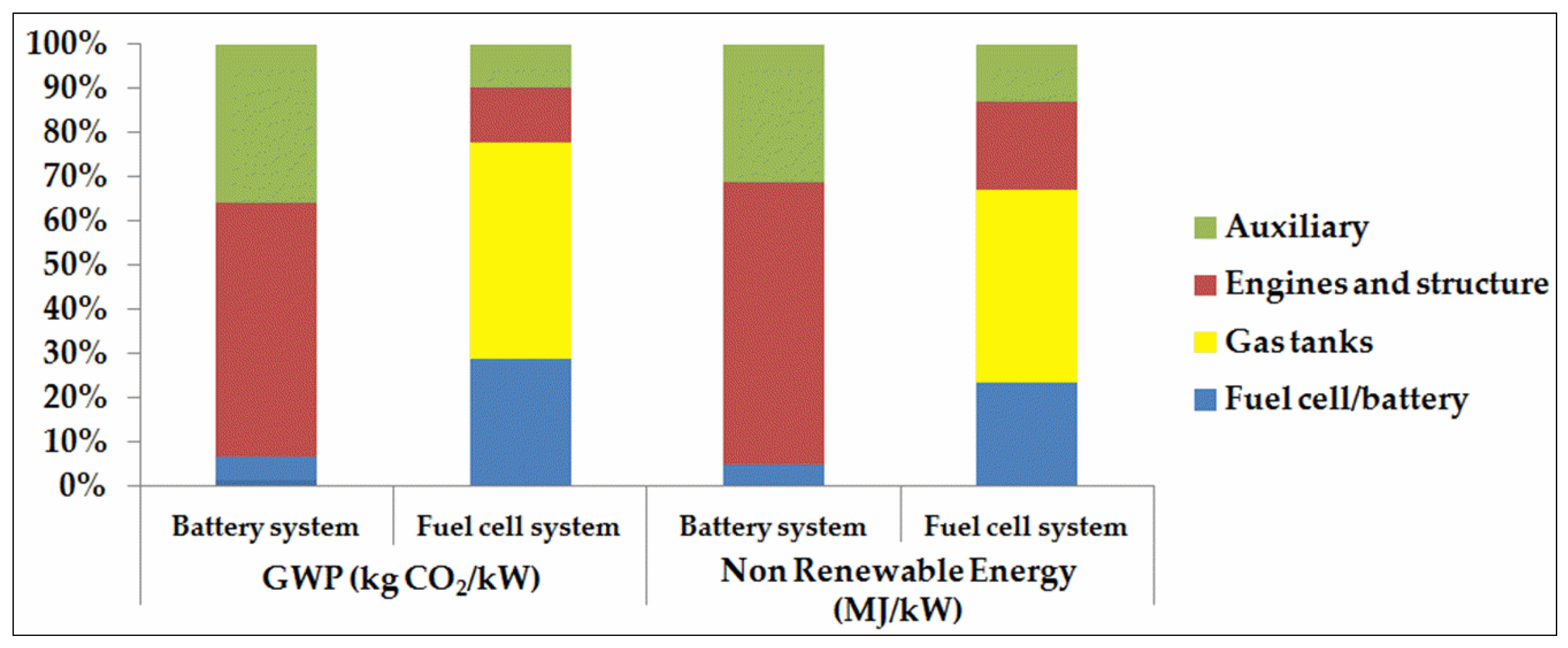
LCA results show similar trends for stationary and mobile applications. As can be noticed in the
Figure 9 and
Figure 10, both fuel cell and battery-based systems have low environmental burdens. In fact, for the stationary application, the GWP is 1% and 3%, for the battery-based and fuel cell-based systems, respectively, whereas it is 5% and 29%, respectively, for the mobile application. These values are rather low, if compared to GWP of other components for the same systems. For example, in the case of the stationary application, photovoltaic panels provide 85% and 31% of the GWP for the battery-based and fuel cell-based systems, respectively. For the mobile systems, the engine and structure of the UAV result in 58% and 12% of the GWP for the battery-based and fuel cell-based systems, respectively.
Although a direct comparison with previous studies is not easy due to the different methods for impact assessment used, similar battery-based stationary systems investigated by Balcombe et al. [
51] and Kabakian et al. [
40] confirm the dominating impact of the solar panels with respect to batteries. No detailed LCA studies on stationary systems coupling PV and fuel cells are available. In a study by Bauer et al. [
15] in a comparison between battery and fuel cell electric vehicles, both batteries and fuel cells resulted in having lower environmental burdens for GWP with respect to the glider of the vehicle (i.e., the vehicle without drivetrain). Even if the structure of the drone and the glider of the vehicle in [
15] are different in the materials used and in weight with respect to the battery/fuel cell, a similar trend can be observed in
Figure 10, as the structure of the UAV represents the largest contribution to the total impact, especially in the case of the battery system.
The impact of the batteries is mainly given by the electrode manufacturing [
52], although distribution of the impacts between anode and cathode depends on the battery chemistry [
53]. The environmental performance of batteries can be enhanced by improving the manufacturing process, for example, by reducing or replacing some elements, like gallium used for the resistors [
54], or improving recycling and recovery of materials [
55].
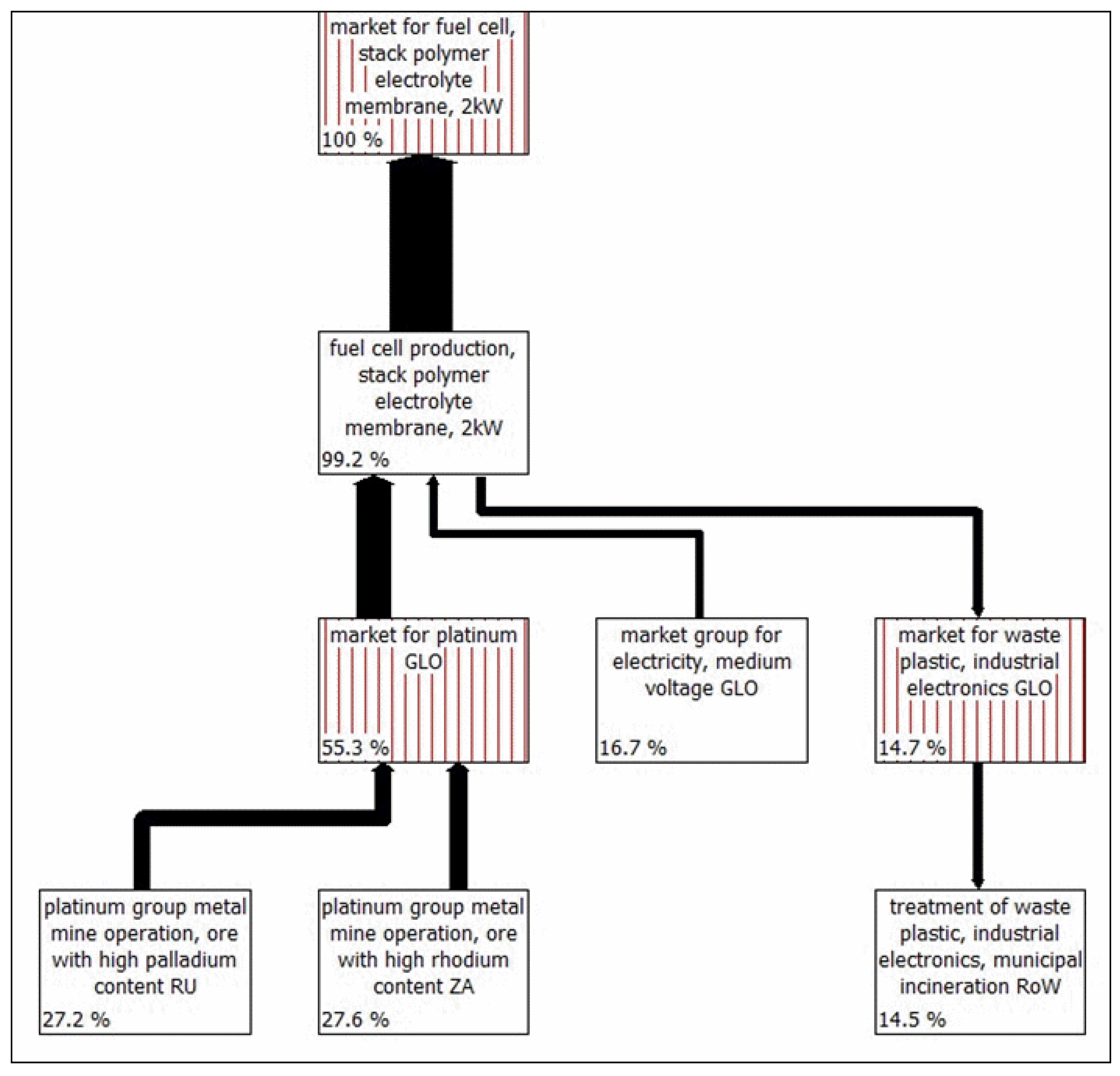
Similar considerations can be outlined in the case of fuel cells, where the largest contribution to the environmental impact is given by the platinum group metals. The impact of platinum group metals, although their small amount, lies mainly in their extraction process, as suggested in previous studies [
56,
57] and confirmed by the impacts flowchart shown in
Figure 11.
As can be seen in
Figure 9 and
Figure 10, for both hydrogen-based systems, a significant impact is given by the gas tanks (62% for the stationary system and 49% for the mobile one). It must be pointed out that due to the different application requirements, different types of tanks have been chosen for the systems: Type I aluminum tanks [
58] for the stationary system and Type III (aluminum liner wrapped with carbon fiber [
58]) for the mobile application, due to the stringent weight issues. Although different, both gas cylinders types have high environmental burdens, mainly associated with the production of the materials they are made of. In the case of the Type III tank, one of the main contributors is the PAN fiber production. However, the last step of PAN conversion into carbon fiber has not been considered in this study, as previously reported in paragraph 4.2.2. In other studies, the contribution of carbon fiber was considered [
46,
47,
48]. In [
46] the authors report that the production of carbon fiber from PAN is a very energy-intensive process, involving the thermosetting of PAN fibers into an oxidizing atmosphere at 200–300 °C and carbonizing them at 1000–1700 °C, leading to 80% of the total impact for carbon fiber production. Both the liner of the Type III tanks and the Type I tanks for the stationary system are made of aluminum. The main contribution to the environmental impact of this material is the electrical energy consumption, the most critical step being the electrolytic smelting of bauxite [
59]. Furthermore, in this study, primary aluminum was considered, which is much less environmentally friendly than secondary aluminum [
59].
5. Conclusions
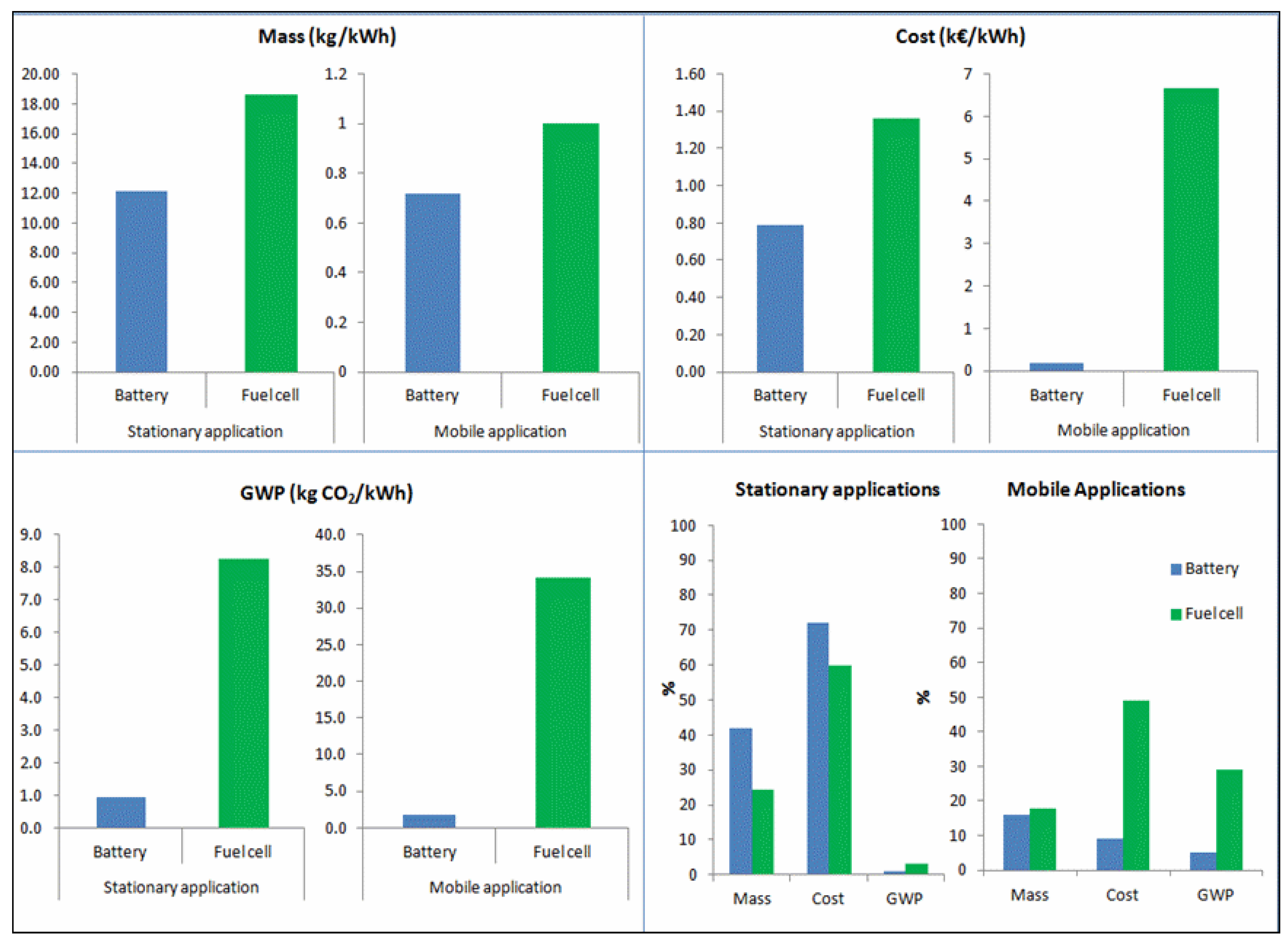
In order to compare the battery and fuel cell-based technology for energy storage in stationary and mobile applications, the results of LCA and cost analysis have been normalized per kWh energy supplied and they are summarized in
Figure 12. The mass of the storage system, cost, and global warming potential are reported, together with the corresponding impact of the energy storage on the system.
Both systems examined, whether for stationary or mobile use, present similar advantages and drawbacks. For both stationary and mobile systems presented, the battery-based systems are simpler than the fuel cell-based ones, requiring fewer auxiliary components. The latter requires a power supply that determines a reduction in the overall system efficiency, since this power is not used for the household or the flying range. The fuel cell systems are, thus, oversized to compensate this extra consumption (and efficiency of the electrolyzer, in the case of the fuel cell-based stationary system). Systems using battery storage can benefit from a wide commercial diffusion of Li-ion batteries and correlated devices for the chosen application (for example, the already assembled micro-UAVs, as well as kits containing battery packs, solar panels, controllers, and an inverter for stationary off-grid applications), which makes the prices more attractive. On the other hand, as soon as the amount of energy to be stored increases, new batteries have to be added, which means additional costs and the increasing weight of the system. In stationary applications weight is not an issue. However, in UAV applications the weight of the additional battery might not be compatible with the features of a drone and become a limiting factor.
In FC-based systems, given the maximum power output of a fuel cell (and its fuel consumption), the only limiting factor is the amount of hydrogen to be stored. The main drawback of fuel cell-based systems is, at present, represented by their high cost, which is about double that of a battery-based system of the same size and for the same applications. Fuel cell-based systems are more complex and require a larger number of auxiliary components for their operation, which means additional weight. This has to be taken into account, especially when considering mobile applications.
LCA results have shown that both battery and fuel cells have low environmental burdens with respect to other components of the same systems.
Acknowledgments
This work was performed in the framework of the Piedmont Regional projects “STERIN” and “Dron-Hy”, financed by FINPIEMONTE, POR-FESR Asse I, Attività I.1.3 Innovazione e P.M.I., Polo “Architettura Sostenibile e Idrogeno” and Polo “Polight”, respectively.
Author Contributions
Nadia Belmonte performed cost and Life cycle assessment analysis and drafted the paper; Carlo Luetto and Stefano Staulo defined the size and auxiliaries of the investigated systems; Paola Rizzi and Marcello Baricco coordinated the activities and finalized the text.
Conflicts of Interest
The authors declare no conflict of interest.
References
- McLellan, B.; Zhang, Q.; Farzaneh, H.; Utama, N.A.; Ishihara, K.N. Resilience, sustainability and risk management: A focus on energy. Challenges 2012, 3, 153–182. [Google Scholar] [CrossRef]
- Huggins, R.A. Energy Storage: Fundamentals, Materials and Applications, 1st ed.; Springer: Dordrecht, The Netherlands, 2015. [Google Scholar]
- Lavorante, M.J.; Messina, L.G.; Franco, J.I.; Bonelli, P. Design of an integrated power system using a proton exchange membrane fuel cell. Int. J. Hydrog. Energy 2014, 39, 8631–8634. [Google Scholar] [CrossRef]
- Rizzi, P.; Pinatel, E.; Luetto, C.; Florian, P.; Graizzaro, A.; Gagliano, S.; Baricco, M. Integration of a PEM fuel cell with a metal hydride tank for stationary applications. J. Alloy Compd. 2015, 645, 338–342. [Google Scholar] [CrossRef]
- Khalid, F.; Dincer, I.; Rosen, M.A. Analysis and assessment of an integrated hydrogen energy system. Int. J. Hydrog. Energy 2016, 41, 7960–7967. [Google Scholar] [CrossRef]
- Wang, C.; Nehrir, M.H. Power management of a stand-alone wind/photovoltaic/fuel cell energy system. IEEE Trans. Energy Convers. 2008, 23, 957–967. [Google Scholar] [CrossRef]
- Khan, M.J.J.; Iqbal, M.T. Pre-feasibility study of stand-alone hybrid energy systems for applications in Newfoundland. Renew. Energy 2005, 30, 835–854. [Google Scholar] [CrossRef]
- Fazelpour, F.; Soltani, N.; Rosen, M.A. Economic analysis of standalone hybrid energy systems for application in Tehran, Iran. Int. J. Hydrog. Energy 2016, 41, 7732–7743. [Google Scholar] [CrossRef]
- Proietti, S.; Sdringola, P.; Castellani, F.; Garinei, A.; Astolfi, D.; Piccioni, E.; Desideri, U.; Vuillermoz, E. On the possible wind energy contribution for feeding a high altitude smart mini grid. Energy Procedia 2015, 75, 1072–1079. [Google Scholar] [CrossRef]
- Ulleberg, O.; Nakken, T.; Ete, A. The wind/hydrogen demonstration system at Utsira in Norway: Evaluation of system performance using operational data and updated hydrogen energy system modeling tools. Int. J. Hydrog. Energy 2010, 35, 1841–1852. [Google Scholar] [CrossRef]
- Silva, S.B.; Severino, M.M.; de Oliveira, M.A.G. A stand-alone hybrid photovoltaic, fuel cell and battery system: A case study of Tocantins, Brazil. Renew. Energy 2013, 57, 384–389. [Google Scholar] [CrossRef]
- Madaci, B.; Chenni, R.; Kurt, E.; Hemsas, K.E. Design and control of a stand-alone hybrid power system. Int. J. Hydrog. Energy 2016, 41, 12485–12496. [Google Scholar] [CrossRef]
- Bayrak, Z.U.; Bayrak, G.; Ozdemir, M.T.; Gencoglu, M.T.; Cebeci, M. A low-cost power management system design for residential hydrogen & solar energy based power plants. Int. J. Hydrog. Energy 2016, 41, 12569–12581. [Google Scholar]
- Bartolozzi, I.; Rizzi, F.; Frey, M. Comparison between hydrogen and electric vehicles by life cycle assessment: A case study in Tuscany, Italy. Appl. Energy 2013, 101, 103–111. [Google Scholar] [CrossRef]
- Bauer, C.; Hofer, J.; Althaus, H.-J.; Del Duce, A.; Simons, A. The environmental performance of current and future passenger vehicles: Life cycle assessment based on a novel scenario analysis framework. Appl. Energy 2015, 157, 871–883. [Google Scholar] [CrossRef]
- Bhardwaj, A.; Samb, L.; Akanksha; Martín-Torres, F.J.; Kumar, R. Review: UAVs as remote sensing platform in glaciology: Present applications and future prospects. Remote Sens. Environ. 2016, 175, 196–204. [Google Scholar] [CrossRef]
- Rokhmana, C.A. The potential of UAV-based remote sensing for supporting precision agriculture in Indonesia. Procedia Environ. Sci. 2015, 24, 245–253. [Google Scholar] [CrossRef]
- Gago, J.; Douthe, C.; Coopman, R.E.; Gallego, P.P.; Ribas-Carbo, M.; Flexas, J.; Escalona, J.; Medrano, H. Review UAVs challenge to assess water stress for sustainable agriculture. Agric. Water Manag. 2015, 153, 9–19. [Google Scholar] [CrossRef]
- Stöcker, C.; Eltner, A.; Karrasch, P. Measuring gullies by synergetic application of UAV and close range photogrammetry—A case study from Andalusia, Spain. Catena 2015, 132, 1–11. [Google Scholar] [CrossRef]
- Traub, L.W. Range and endurance estimates for battery-powered. J. Aircraft 2011, 48, 703–707. [Google Scholar] [CrossRef]
- Lawrence, D.A.; Mohseni, K. Efficiency analysis for long-duration electric MAVs. In Proceedings of the Infotech@Aerospace Conference, Arlington, VG, USA, 26–29 September 2005; pp. 2005–7090.
- Simic, M.; Bil, C.; Vojisavljevic, V. Investigation in wireless power transmission for UAV charging. Procedia Comput. Sci. 2015, 60, 1846–1855. [Google Scholar] [CrossRef]
- Thampan, T.; Shah, D.; Cook, C.; Novoa, J.; Shah, S. Development and evaluation of portable and wearable fuel cells for soldier use. J. Power Sources 2014, 259, 276–281. [Google Scholar] [CrossRef]
- Graw, K.N.; Brownlee, Z.B.; Shukla, K.C.; Chu, D. Assessment of Alane as a hydrogen storage media for portable fuel cell power sources. J Power Sources 2012, 217, 417–430. [Google Scholar] [CrossRef]
- Belmonte, N.; Girgenti, V.; Florian, P.; Peano, C.; Luetto, C.; Rizzi, P.; Baricco, M. A comparison of energy storage from renewable sources through batteries and fuel cells: A case study in Turin, Italy. Int. J. Hydrog. Energy 2016, 41, 21427–21438. [Google Scholar] [CrossRef]
- Nishar, A.; Richards, S.; Breen, D.; Robertson, J.; Breen, B. Thermal infrared imaging of geothermal environments and by an unmanned aerial vehicle (UAV): A case study of the Wairakei e Tauhara geothermal field, Taupo, New Zealand. Renew. Energy 2016, 86, 1256–1264. [Google Scholar] [CrossRef]
- Sankarasrinivasan, S.; Balasubramanian, E.; Karthik, K.; Chandrasekar, U.; Gupta, R. Health monitoring of civil structures with integrated UAV and image processing system. Procedia Comput. Sci. 2015, 54, 508–515. [Google Scholar] [CrossRef]
- Metni, N.; Hamel, T. A UAV for bridge inspection: Visual servoing control law with orientation limits. Autom. Constr. 2007, 17, 3–10. [Google Scholar] [CrossRef]
- Valavanis, K.P.; Vachtsevanos, G.J. Handbook of Unmanned Aerial Vehicles, 1st ed.; Springer: Dordrecht, The Netherlands, 2015; p. 1219. [Google Scholar]
- Chang, T.; Yu, H. Improving electric powered UAVs’ endurance by incorporating battery dumping concept. Procedia Eng. 2015, 99, 168–179. [Google Scholar] [CrossRef]
- Renau, J.; Barroso, J.; Lozano, A.; Nueno, A.; Sánchez, F.; Martín, J.; Barreras, F. Design and manufacture of a high-temperature PEMFC and its cooling system to power a lightweight UAV for a high altitude mission. Int. J. Hydrog. Energy 2016, 41, 19702–19712. [Google Scholar] [CrossRef]
- Bradley, T.H.; Moffitt, B.A.; Mavris, D.N.; Parekh, D.E. Development and experimental characterization of a fuel cell powered aircraft. J. Power Sources 2007, 171, 793–801. [Google Scholar] [CrossRef]
- Dudek, M.; Tomczyk, P.; Wygonik, P.; Korkosz, M.; Bogusz, P.; Lis, B. Hybrid fuel cell—Battery system as a main power unit for small unmanned aerial vehicles (UAV). Int. J. Electrochem. Sci. 2013, 8, 8442–8463. [Google Scholar]
- AEROSTACK Horizon. Available online: https://www.hes.sg/in-the-air (accessed on 17 December 2016).
- Norris, B.; Paulauska, F.L. Melt Processable PAN Precursor for High Strength, Low-Cost Carbon Fibers; Oak Ridge National Laboratory: Oak Ridge, TN, USA, 2016. [Google Scholar]
- Gotthold, P.I.D.W. Enhanced Materials and Design Parameters for Reducing the Cost of Hydrogen Storage Tanks; Pacific Northwest National Laboratory: Richland, WA, USA, 2016. [Google Scholar]
- Simons, A.; Bauer, C. A life-cycle perspective on automotive fuel cells. Appl. Energy 2015, 157, 884–896. [Google Scholar] [CrossRef]
- International Organization for Standardization. 14040-Environmental Management–Life Cycle Assessment–Principles and Framework; International Organization for Standardization: Geneva, Switzerland, 2006. [Google Scholar]
- ISO. 14044-Environmental Management–Life Cycle Assessment–Requirements and Guidelines; ISO: Geneva, Switzerland, 2006. [Google Scholar]
- Kabakian, V.; McManus, M.C.; Harajli, H. Attributional life cycle assessment of mounted 1.8 kWp monocrystalline photovoltaic system with batteries and comparison with fossil energy production system. Appl Energy 2015, 154, 428–437. [Google Scholar] [CrossRef] [Green Version]
- Dufo-López, R.; Zubib, G.; Fracastoro, G.V. Tecno-economic assessment of an off-grid PV-powered community kitchen for developing regions. Appl. Energy 2012, 91, 255–262. [Google Scholar] [CrossRef]
- Petrillo, A.; De Felice, F.; Jannelli, E.; Autorino, C.; Minutillo, M.; Lavadera, A.L. Life cycle assessment (LCA) and life cycle cost (LCC) analysis model for a stand-alone hybrid renewable energy system. Renew. Energy 2016, 95, 337–355. [Google Scholar] [CrossRef]
- Cox, B.; Treyer, K. Environmental and economic assessment of a cracked ammonia fuelled alkaline fuel cell for off-grid power applications. J. Power Sources 2015, 275, 322–335. [Google Scholar] [CrossRef]
- Khan, F.I.; Hawboldt, K.; Iqbal, M.T. Life cycle analysis of wind-fuel cell integrated system. Renew. Energy 2005, 30, 157–177. [Google Scholar] [CrossRef]
- Ecoinvent Database v 3.3. Available online: http://www.ecoinvent.ch/ (accessed on 18 March 2017).
- Harper International, Processing Advancements within Reach for Achieving Significant Reductions in Carbon Fiber Cost of Manufacturing, JEC Europe 2013, ParisICS Carbon Conference. Available online: http://www.harperintl.com/wp-content/uploads/2011/09/JEC.pdf (accessed on 15 January 2017).
- Song, Y.S.; Young, J.R.; Gutowski, T.G. Life cycle energy analysis of fiber reinforced composites. Compos. A: Appl. Sci. Manuf. 2009, 40, 1257–1265. [Google Scholar] [CrossRef]
- Duflou, J.R.; Deng, Y.; Van Acker, K.; Dewulf, W. Do fiber-reinforced polymer composites provide environmentally benign alternatives? A life-cycle-assessment-based study. MRS Bull. 2012, 37, 374–382. [Google Scholar] [CrossRef]
- SIMA PRO 8.2, LCA Software. Available online: http://www.pre.nl/simapro/simapro_lca_software.htm (accessed on 18 March 2017).
- Jolliet, O.; Margni, M.; Charles, R.; Humbert, S.; Payet, J.; Rebitzer, G.; Rosenbaum, R. IMPACT 2002+: A new life cycle impact assessment methodology. Int. J. Life Cycle Assess. 2003, 8, 324–330. [Google Scholar] [CrossRef]
- Balcombe, P.; Rigby, D.; Azapagic, A. Environmental impacts of microgeneration: Integrating solar PV, Stirling engine CHP and battery storage. Appl. Energy 2015, 139, 245–259. [Google Scholar] [CrossRef]
- Amarakoon, S.; Smith, J.; Segal, B. Application of Life-Cycle Assessment to Nanoscale Technology: Lithium-Ion Batteriesfor Electric Vehicles; Final Report; United States Environmental Protection Agency: Washington, DC, USA, 2013; pp. 63–93.
- Liang, Y.; Su, J.; Xi, B.; Yu, Y.; Ji, D.; Sun, Y.; Cui, C.; Zhu, J. Life cycle assessment of lithium-ion batteries for greenhouse gas emissions. Resour. Conserv. Recycl. 2017, 117, 285–293. [Google Scholar] [CrossRef]
- Unterreiner, L.; Jülch, V.; Reith, S. Recycling of battery technologies—Ecological impact analysis using life cycle assessment (LCA). Energy Procedia 2016, 99, 229–234. [Google Scholar] [CrossRef]
- Heelan, J.; Gratz, E.; Zheng, Z.; Wang, Q.; Chen, M.; Apelian, D.; Wang, Y. Current and prospective Li-ion battery recycling and recovery processes. JOM 2016, 68, 2632–2638. [Google Scholar] [CrossRef]
- Duclos, L.; Lupsea, M.; Mandil, G.E.; Svecova, L.; Thivel, P.-X.; Laforest, V. Environmental assessment of proton exchange membrane fuel cell platinum catalyst recycling. J. Clean. Prod. 2017, 142, 2612–2628. [Google Scholar] [CrossRef]
- Evangelisti, S.; Tagliaferri, C.; Brett, D.J.L.; Lettieri, P. Life cycle assessment of a polymer electrolyte membrane fuel cell system for passenger vehicles. J. Clean. Prod. 2017, 142, 4339–4355. [Google Scholar] [CrossRef]
- Lagault, M. Pressure vessel tank types, Composites World (2012). Available online: http://www.compositesworld.com/articles/pressure-vessel-tank-types (accessed on 10 December 2016).
- Zhang, Y.; Sun, M.; Hong, J.; Han, X.I.; He, J.; Shi, W.; Li, X. Environmental footprint of aluminum production in China. J. Clean. Prod. 2016, 133, 1242–1251. [Google Scholar] [CrossRef]
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}