Detection of Oil in Ice and Snow


1
Spill Science, Edmonton, Alberta T6W 1J6, Canada
2
Emergencies Science and Technology Section, Environment Canada, Ottawa K1A 0H3, Canada
*
Author to whom correspondence should be addressed.
J. Mar. Sci. Eng. 2013, 1(1), 10-20; https://doi.org/10.3390/jmse1010010
Submission received: 23 October 2013
/
Revised: 7 November 2013
/
Accepted: 7 November 2013
/
Published: 22 November 2013
(This article belongs to the Special Issue Strategies for Oil Detection and Remediation in the Arctic Ocean)
Abstract
:The response to a major oil spill can be challenging in temperate climates and with good weather conditions. By contrast, a major spill in or under ice and snow, presents a whole new series of challenges. This paper reviews detection technologies for these challenging situations. A number of acoustic techniques have been tried in test tank situations and it was found that acoustic detection of oil was possible because oil behaves as a solid in acoustic terms and transmits shear waves. Laboratory tests have been carried out and a prototype was built and tested in the field. Radio frequency methods, such as ground penetrating radar (GPR), have been tested for both oil-under-ice and oil-under-snow. The GPR method does not provide sufficient discrimination for positive oil detection in actual spills. Preliminary tests on the use of Nuclear Magnetic Resonance for detecting oil, in and under ice, shows promise and further work on this is being done at this time. A number of other oil-in-ice detection technologies have been tried and evaluated, including standard acoustic thickness probes, fluorosensor techniques, and augmented infrared detection. Each of these showed potential in theory during tank tests. Further testing on these proposed methods is required.
1. Introduction
Public scrutiny demands that the location and extent of oil spills be identified. In the Arctic, detection is complicated by the presence of snow and ice and sometimes there are no adequate technologies to detect oil.
Several general reviews of oil spill remote sensing in open water situations have been published [1]. These reviews show progress and indicate that oil spill remote sensing is at a relatively good state of the art in open waters or where some ice might be present. This paper will review the state of the art of oil-in-ice detection. While some reviews of the detection of oil in and with ice have been published, all point out that the state of the art is significantly behind that for detecting oil on open water [2,3,4].
2. Overview of Detection of Oil in or under Ice and Snow
The difficulties in detecting oil in or under ice or snow are numerous. Ice is always a heterogeneous material and incorporates air, sediment, salt, and water, many of which may present false oil-in-ice signals to the detector. In addition, snow on top of the ice or even incorporated into the ice adds complications. During freeze-up and thaw in the spring, there may not be distinct layers of water and ice. There are many different types of ice and different ice crystalline orientations. Snow is also heterogeneous and may consist of several layers with different densities. Furthermore oil may penetrate snow easily and thus move to the subsurface of the snow, which may be ice or soil. Figure 1 shows an oiled piece of ice.
Figure 1.
Oil in a lead, between ice floes. The image shows an area about two metres wide. This shows several different types of ice and snow; the oil although derived from a single spill is in several locations in the lead.
Figure 1.
Oil in a lead, between ice floes. The image shows an area about two metres wide. This shows several different types of ice and snow; the oil although derived from a single spill is in several locations in the lead.

The feasibility of various technologies for detecting oil in ice was reviewed by Gill [5]. Some of the proposed technologies were tried on oil-under-ice in a test tank [6]. This led to the pursuit of acoustic technologies which were taken as far as field testing of a prototype. Many of the other technologies have not been tried since. Much of the literature on the topic is now three decades old or more, reassessments of oil-in-ice technologies have taken place and some of these subjected to both controlled laboratory and field testing [3]. With this some new potential technologies arose; however most of these will require more research and development before they become field tools.
2.1. Optical Methods
Over the years, many researchers have suggested that one might use the transparency of some ice to detect oils. Unfortunately, in reality, ice in the field is rarely transparent because of the incorporation of salt, air and sediment. Often snow is on top of ice. The use of most optical methods is highly restricted by the impurities in ice [4]. Several workers used optical methods on pure ice and this appeared to work well in test tank situations [7,8]. The end result of all these studies is that actual sea ice is never transparent and there are doubts that any of these optical techniques would work under typical field conditions.
2.2. Acoustic Methods
Sound or acoustic waves consist of two types: Compressive or longitudinal waves and transverse waves. A transverse wave (or shear wave) is a moving wave that consists of oscillations perpendicular to the direction of travel. Longitudinal waves propagate by means of compression and decompression in the direction of travel. Longitudinal waves are waves that have the same direction of vibration as their direction of travel. These two types have different movement in ice as will be described below.
The acoustical properties of ice are variable. Compressive waves travel almost three times as rapidly as transverse waves, although the speed varies significantly with the type of ice [5]. The attenuation of acoustic waves is also affected by ice type. Sound is strongly attenuated with increasing salinity and increasing frequency. A frequency of about 200 kHz is about the maximum usable with typical multi-year ice. The speed of compressive and transverse waves varies with the salinity of the ice. In summary the speed of the wave decreases as the salinity rises. The acoustic impedance of air and different types of ice vary as well with the impedance of ice being about twice that of water.
Experimenters found that standard acoustic units designed for metal and concrete inspection could be used for oil-in-ice detection [6]. Initially, this was a surprise because the attenuation of ice and the source of the reflected signal for oil were not readily apparent from the data. Subsequent studies have shown that the physics of sound/oil interaction is relatively simple. There are two sources of signals from oil in or under ice. First, oil reflects the standard compressive (p) wave and this signal is received by standard acoustic units just like the interfaces in metal or other building materials. But oil behaves acoustically like a non-Newtonian fluid and will also reflect the shear or (s) wave. The s-waves travel at about half to one-third the velocity of the compressive waves and can be distinguished by their time delay. One could develop a more discriminating oil-in-ice detector by developing a unit that selectively detected shear waves. In theory, only sediment would propagate similar shear waves.
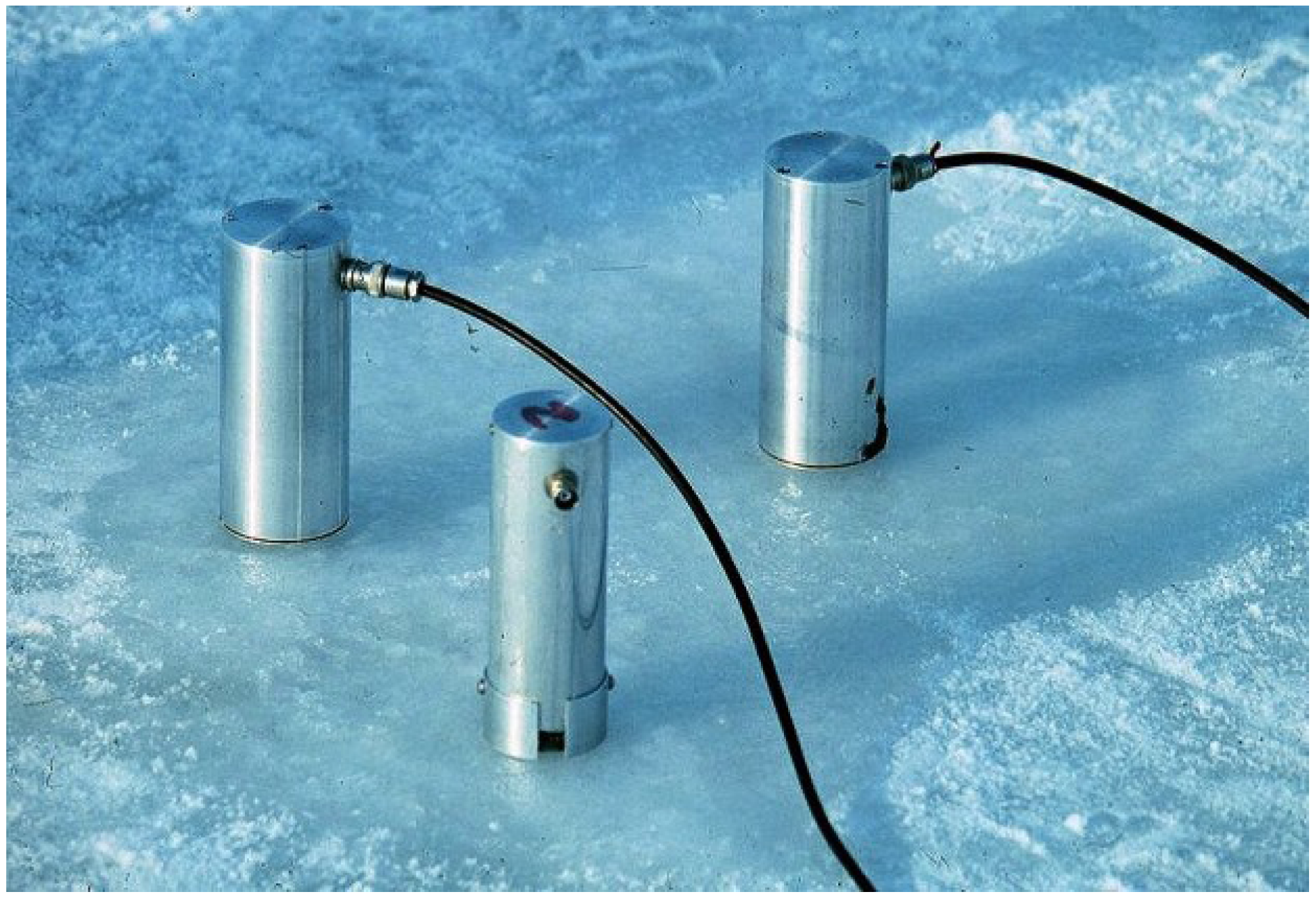
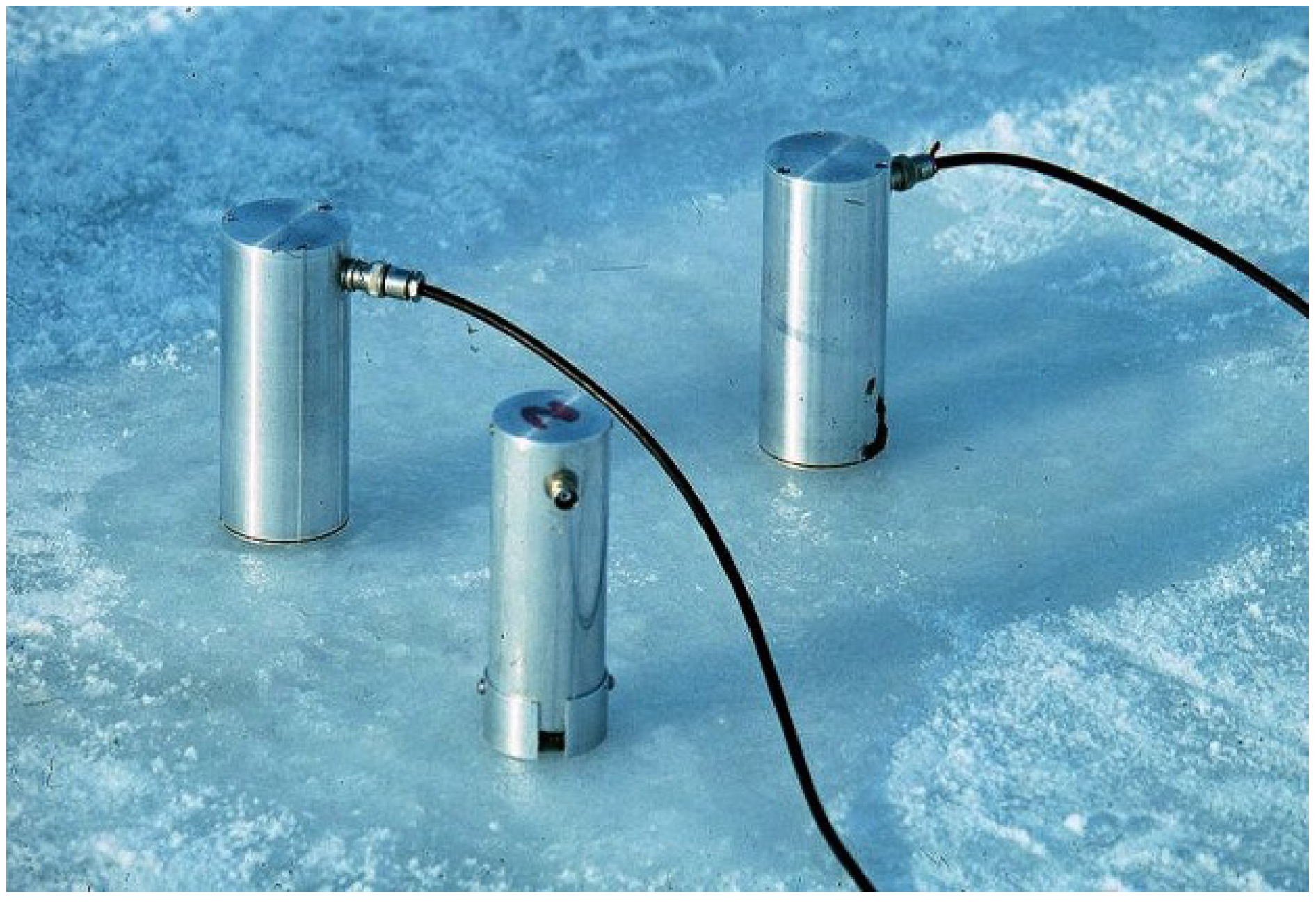
Jones and colleagues studied the problem and developed a detection device consisting of a phased array detector that was capable of detecting transverse or shear waves directly and thus determining whether oil was present, with a high factor of reliability [9,10,11,12]. This group found that acoustic detection of oil was possible because oil behaves as a solid in acoustic terms and transmits a shear wave [11,12]. Furthermore, there is an angular dependence to these phenomena and it can be used to distinguish between the many possible types of interference in ice, such as air bubbles, and oil. Laboratory tests were conducted and a field prototype unit was developed and tested. Several studies showed that acoustic means of detecting oil under ice show potential. Unfortunately these technologies were not commercialized or developed further. One of the difficulties is, of course, the logistics of deploying transducers to a clean ice surface. This in fact may be as difficult as drilling holes in the ice. Figure 2 shows such transducers placed on sea ice for a test.
Figure 2.
Transducers placed on sea ice for a field test of acoustic measure to detect oil under ice.
Figure 2.
Transducers placed on sea ice for a field test of acoustic measure to detect oil under ice.
Underwater Acoustic Methods
Underwater acoustic measurements of the ice/water surface have taken place for many years and this is a prime method for determining under-ice roughness [13]. This method may also be useful for oil under ice as it has been suggested that the oil/water and oil/ice interfaces may be detectable and also that the oil would change the underwater ice profile [13,14,15,16].
2.3. Radio-Frequency Methods
An extensive effort has been made to use radar methods of detection of targets in ice [17,18,19]. A radar system has a radio transmitter that emits radio waves and then detects the reflections. When these waves come into contact with an object they are usually reflected and/or scattered in many directions. Radar signals are reflected well by materials of considerable electrical conductivity-especially by most metals, by seawater, and by wetlands. It was hoped that the differences in conductivity of oil, ice and seawater would provide for oil detection. Ice has variable transparency to radio waves. Freshwater ice is relatively transparent to radio waves, whereas saline first-year ice is highly attenuating. Attenuation increased rapidly with increasing frequency and salinity. Low frequencies (less than 1 MHz) are best suited to the task of penetrating ice.
Extensive investigations of ice electromagnetic properties were carried out in an attempt to use radio detection for oil under ice detection [17,18,19]. Morey et al. studied the in-situ complex dielectric constant of sea ice using time-domain spectroscopy [17]. It was found that: the polarizing properties of sea ice can depend on the ice structure, the amount of brine included in the ice, the temperature and on the orientation of the ice crystals with respect to the brine. This study was followed up by a study of multi-year ice [18]. Sounding of multi-year sea ice, using impulse radar operating in the 80- to 500-MHz frequency band, revealed that the bottom of this ice could not always be detected. It was found that the bottom of the ice could not be detected when the ice structure had a high brine content. The brine volume dominates the loss mechanism in first-year sea ice, and the same was found true for multi-year sea ice.
The second important facet of oil detection using radio frequency is the differential dielectric constant of oil, ice, and water. Oil has a dielectric constant of 2 to 3, snow of 1 to 2, and sea water of about 80 as shown in Table 1 [3]. Multi-year ice has a dielectric constant of about 3 and first-year ice of 3 to about 5. This differential in dielectric constants has led many theorists to predict that oil should be detectable in ice because of the phase reversals that should be apparent when a wave passes through a dielectric constant of 2 (oil) and immediately hits the seawater with a dielectric constant of 80. If the oil was not there, the dielectric constant would slowly change from that of ice (2 to 5) to that of seawater. The rapid change with oil present should produce a return due to the strong reflection caused by the dielectric change.

{kind=link}
{kind=link}
{kind=link}
| Dielectric Constant | Conductivity (S/m) | |
|---|---|---|
| Snow | 1.4–2.5 | 10−7 |
| Oil | 2–4 | 10−5 |
| Fresh water ice | 3 | |
| Sea Ice | 4–7 | >10−2 |
| Frozen soil | 4–5 | |
| Water | 80 |
The third facet of radio frequency detection of oil under ice or snow is that of conductivity. Table 1 shows that there are major conductivity differences between oil, snow and sea ice.
Four types of signal return might be used to detect the presence of oil under ice: (a) Out-of-phase returns due to the low conductivity of oil; (b) large amplitude returns due to constructive interference effects; (c) spatial dependence of amplitude-of-return signals due to interference effects; and (d) conductivity differences [20].
Resonance scattering theory was proposed as a means of explaining the signals that might be achieved from plane dielectric layers of oil and ice [21,22]. Subsequent analysis showed this to be an inappropriate model [23,24,25,26]. Researchers showed there would be essentially no electromagnetic resonance effect in sea ice at frequencies above about 0.2 GHz. This is because of the combined effects of absorption in the conducting sea ice and variations in its thickness. Additional effects are present that also serve to eliminate resonances, including scattering of the electromagnetic wave by small-scale surface structures. As a result, there is no possibility of using resonances to detect the presence of oil under sea ice, confirming the findings from the tank experiments.
2.4. Ground Penetrating Radar (GPR)
Ground Penetrating Radar (GPR) reflections will be seen if the targets have different electromagnetic properties (dielectic permittivity and electric conductivity). Some of the same constants apply as in Table 1. One of the issues is that there are heterogeneous media, for example sea ice (dielectric permittivity of about 5) often has salt water intrusions (dielectric permittivity of about 80). This certainly complicates oil under ice or snow detection. Additionally, the processing of GPR is complex, but can be sometimes used to delineate targets [27].
Several early workers proposed that the oil–ice boundary should be seen in impulse radar outputs [3]. Tests during a field test in the Beaufort Sea showed anomalies in the output when the oil and gas were located under the ice [28,29]. The oil–ice interface was not seen, however, in subsequent tank tests [6].
Ground-penetrating radar propagates easily through snow and the dielectric permittivity is also relatively favourable (see Table 1). Sea ice, on the other hand, has low conductivity and can possess structure and therefore heterogeneity. Snow being more consistent, it is an easier medium to penetrate. Oil and snow do have somewhat similar electromagnetic properties and thus are harder to distinguish. Oil may be more easily distinguished from snow when oil displaces air in the snow thus creating a higher dielectric target. This anomaly from air-filled snow may be easier to detect using GPR. The depth of an oil layer than can be distinguished when at least one quarter of a wavelength of the radar wave length. Since most commercial ground-penetrating radars have upper frequency limits of 1 to 1.5 GHz, one quarter wave length in snow is about 4 to 8 cm. This is actually quite a thick oil layer and would be achieved only in special circumstances. Bradford and coworkers noted that oil spills could constitute a very complex environment if they drain through a snow pack, rather than form on ice in one consistent layer [30,31]. The penetration of GPR through snow depends on the density of snow, and the presence of ice. A mature snow pack with ice and other heterogeneities would constitute a difficult situation for the GPR to discriminate between substituents.
A group of scientists applied ground penetrating radar to a test oil spill off Svalbard and noted that anomalies were observed where the oil was under the ice [30,31,32,33,34]. There has been some work on impulse radar testing on snow covers [30,31]. A field test in Norway with oil under snow showed that detection was poor [30,31]. This test was conducted with a 1000 MHz GPR system. Bradford and coworkers concluded that commercial GPR systems could be effectively used to detect crude oil spills under snow under some circumstances [30,31]. Observation of the reflection amplitude is the indicator of oil. The 2 cm thick oil film trapped between snow and ice resulted in a 5% decrease in amplitude during this test. Optimistically the researchers felt that they could detect oil layers as thin as 1 cm. Thickness of the oil layer might be estimated in some cases. Complications arise from water, inhomogeneous snow, mixed layers and ice layers. However, Bradford and coworkers stated that GPR interpretations cannot provide absolute information about the location of a spill nor will GPR provide a unique indicator of oil [30,31].
2.5. UHF Radiometer
A UHF radiometer was assembled and used in conjunction with an impulse radar. The intensity of the reflected radiation was measured at several frequencies. If selected regions of the spectrum would be absorbed by the oil under the ice, then such a phenomenon would be observed with this device. Frequencies from 300 to 1000 MHz were monitored [6]. No consistent signal was observed if oil was present or not.
2.6. Gas Sniffing and Leak Detection
Many oils have a significant volatile component and may penetrate ice to the surface and could possibly be detected using sensitive gas-sniffing techniques [3,4,35]. Tests of this technique in the field have not been successful. There is concern that too little volatile material actually penetrates the ice and is diffused in the air to yield detection. Tests of this method have shown that this might work when the oil is freshly spilled and if the oil contained a large amount of methane [36].
2.7. Nuclear Magnetic Resonance (NMR)
The concept of using Nuclear Magnetic Resonance to detect oil under snow or ice has been around for years. When placed in a magnetic field, NMR active nuclei (such as 1H—protons or 13C—carbon 13) absorb electromagnetic radiation at a frequency characteristic of the isotope. The resonant frequency, energy of the absorption and the intensity of the signal are proportional to the strength of the magnetic field. For example, in a 21 tesla magnetic field, protons (1H) resonate at 900 MHz. It is common to refer to a 21 T magnet as a 900 MHz magnet, although different nuclei resonate at a different frequency at this field strength. In the earth's magnetic field, such as might be used on oil, the same nuclei resonate at audio frequencies. Proton NMR frequencies are about 1.3 kHz near the equator to 2.5 kHz near the Poles, around 2 kHz being typical of mid-latitudes. These are audio frequencies which vary with the local magnetic field. These earth magnetic field NMR devices are relative cheap but suffer from a number of limitations; especially in mobile applications as there is an absolute need for a homogeneous magnetic field to operate. As there is water everywhere, with two hydrogen atoms, one must either separate the water-hydrogen signal from the oil-hydrogen signal or use 13C to measure the oil. However, the latter signal is relatively weak. Recent work on this method does show promise and large-scale field units are being built [37,38].
3. Detection of Surface Oil with Ice: Conventional Techniques
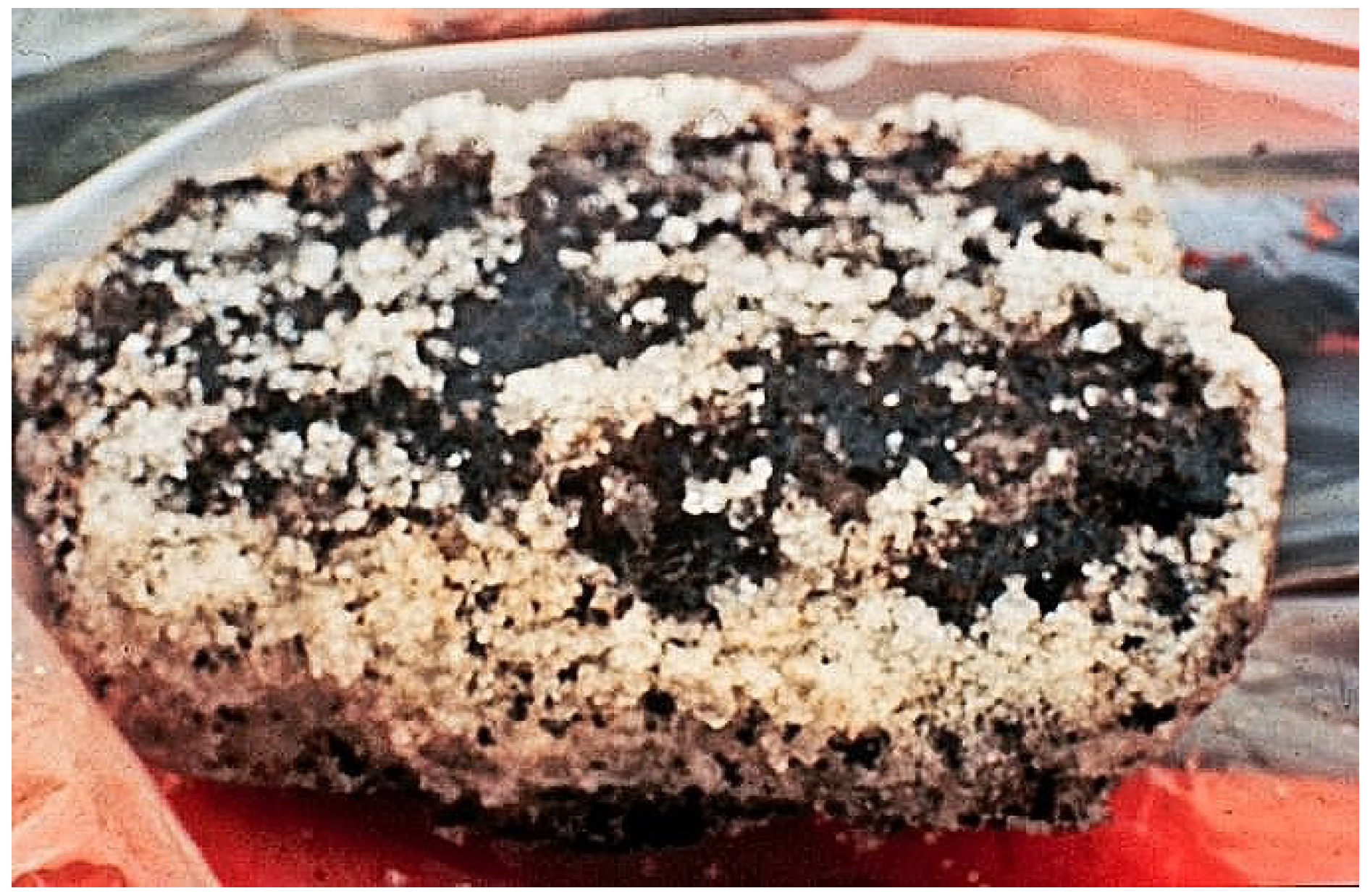
The state of the art in technology for the detection of oil with ice is more advanced than that for oil under ice. Some of these surface detection techniques have proposed to have application to oil in or under ice, however, no potential for this has been shown. Electromagnetic wave penetration of ice, as noted above, is highly dependent on frequency and ice properties. Further, as noted in the overview, the presence of snow and other material on the surface blocks the penetration of most electromagnetic radiation [39]. Figure 3 shows oil in ice from a spill. This oil was not detectable visually from the air because of the small particles and also the presence of sediment in the same area.
Figure 3.
A piece of ice recovered from an area that had undergone a spill (Photograph from Environment Canada). The oil is in small particles throughout this piece of ice.
Figure 3.
A piece of ice recovered from an area that had undergone a spill (Photograph from Environment Canada). The oil is in small particles throughout this piece of ice.

There is an extensive review of the use of remote sensing for open water or that partially infested in ice [1]. The best potential for detecting surface oil with ice is the laser fluorosensor [1,40,41]. Many of the other techniques used for oil on open water suffer when ice is present. This includes infrared, radar and passive microwave.
4. Conclusions
Technology for detecting oil in or under ice is still evolving. Of the many potential technologies reviewed, acoustic techniques show potential and have been successfully tested in the field. Potential radio frequency techniques are still awaiting testing in test tanks or in the field as are results on NMR methods.
Many acoustic techniques were tried in test tank situations and it was found that acoustic detection of oil was possible because oil behaves as a solid in acoustic terms and transmits a shear wave. Furthermore, there is an angular dependence to these phenomena and it can be used to distinguish between the many possible types of interference in ice, such as air bubbles, and oil. Laboratory tests were conducted and a prototype was built and tested in the field. This technology has not, however, been pursued or commercialized. The acoustic technique is highly restricted by the logistics of placing a physical sensor on the ice surface.
Radio frequency methods, such as ground penetrating radar, have been tried for both oil under ice and oil under snow. The method does not provide sufficient discrimination for positive oil detection in actual spills. Other radio frequency methods have been proposed, but at this time are not sufficiently tested or developed.
Nuclear Magnetic Resonance techniques show promise and are currently under further study.
Several other oil-in-ice detection schemes have been assessed and tried, including standard acoustic thickness probes, fluorosensor techniques, and augmented infrared detection. Each of these showed potential in theory and some during tank tests. Further development and testing of these proposed methods are required.
The technology for detecting surface oil with ice is further advanced. There is very limited potential for optical techniques, particularly for infrared techniques. Radar and microwave do not show potential for this application. Laser fluorosensors have been tested on oil, with and on ice, and function well for that application. As such, laser fluorosensors show the greatest potential for detection of oil when the oil is exposed to the surface.
Acknowledgements
The authors acknowledge the reviewers and the editor of this special edition for the helpful suggestions and comments.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Fingas, M.; Brown, C.E. Oil spill remote sensing: A review. In Oil Spill Science and Technology; Fingas, M., Ed.; Gulf Publishing Company: New York, NY, USA, 2011; Chapter 6; pp. 111–169. [Google Scholar]
- Goodman, R. Oil under ice detection: What is the state-of-the-art? In Oil Spill Response: A Global Perspective; Davidson, W.F., Lee, K., Cogswell, A., Eds.; Springer: Dordrecht, The Netherlands, 2008; pp. 7–19. [Google Scholar]
- Dickins, D.F.; Andersen, J.H.S. Remote Sensing Technology Review and Screening; SINTEF Report No. 22; SINTEF Materials and Chemistry: Trondheim, Norway, 2009. [Google Scholar]
- Fingas, M.; Brown, C.E. Detection of oil in, with and under ice and snow. In Proceeding of 36th Arctic Marine Oilspill Program Technical Seminar, Nova Scotia, Canada, 4–6 June 2013; Environment Canada: Ottawa, Canada, 2013; pp. 472–497. [Google Scholar]
- Gill, R. Feasibility of Surface Detection of Oil under Ice; Environmental Protection Service Report EPS 3-EC-79-11; Environment Canada: Ottawa, Canada, 1979. [Google Scholar]
- Stapleton, G.F.; Parashar, S.K.; Snellen, J.B.; Worsfold, R.D. Detection of oil under ice—A laboratory program. In Proceeding of 4th Annual Arctic Marine Oilspill Program Technical Seminar, Edmonton, Canada, 16–18 June 1981; Environmental Canada: Ottawa, Canada, 1981; pp. 587–605. [Google Scholar]
- Goncharov, V.K.; Lyskov, V.G. Problems of forecasting of spreading and remote sensing of the under ice oil spills. In Proceeding of the 15th International Conference on Port and Ocean Engineering Under Arctic Conditions, Espoo, Finland, 23–27 August 1999; Helsinki University of Technology, Ship Laboratory: Espoo, Finland, 1999; pp. 800–809. [Google Scholar]
- Locating Oil under Ice. Available online: http://www.crrel.usace.army.mil/innovations/oil_spill_research/documents/InfoSheet-Locating_Oil_Under_Ice.pdf (accessed on 30 October 2012).
- Jones, H.W.; Kwan, H.W. The detection of oil spills under arctic ice by ultrasound. In Proceeding of 5th Annual Arctic Marine Oilspill Program Technical Seminar, Edmonton, Canada, 15–17 June 1982; Environmental Canada: Ottawa, Canada, 1982; pp. 391–411. [Google Scholar]
- Jones, H.W.; Kwan, H.W. The detection of oil spills under seawater in the arctic ocean. In Proceeding of 6th Annual Arctic Marine Oilspill Program Technical Seminar, Edmonton, Canada, 14–16 June 1983; Environment Canada: Ottawa, Canada, 1983; pp. 241–252. [Google Scholar]
- Jones, H.W.; Kwan, H.W.; Yeatman, E.M. On the design of an apparatus to detect oil trapped under sea ice. In Proceeding of 7th Annual Arctic Marine Oilspill Program Technical Seminar, Edmonton, Canada, 12–14 June 1984; Environmental Canada: Ottawa, Canada, 1984; pp. 295–305. [Google Scholar]
- Jones, H.W.; Kwan, H.W.; Hayman, T.; Yeatman, E.M. The detection of oil under ice by ultrasound using multiple element phased arrays. In Proceeding of 9th Annual Arctic Marine Oilspill Program Technical Seminar, Edmonton, Canada, 10–12 June 1986; Environment Canada: Ottawa, Canada, 1986; pp. 475–484. [Google Scholar]
- Dowdeswell, J.A.; Evans, J.; Mugford, R.; Griffiths, G.; McPhail, S.; Millard, N.; Stevenson, P.; Brandon, M.A.; Banks, C.; Heywood, K.J.; et al. Autonomous underwater vehicles (AUVs) and investigations of the ice-ocean interface in antarctic and arctic waters. J. Glaciol. 2008, 54, 661–672. [Google Scholar] [CrossRef]
- Doble, M.J.; Forrest, A.L.; Wadhams, P.; Laval, B.E. Through-ice AUV deployment: Operational and technical experience from two seasons of arctic fieldwork. Cold Reg. Sci. Techn. 2009, 56, 90–97. [Google Scholar] [CrossRef]
- Doble, M.J.; Wadhams, P.; Forrest, A.L.; Laval, B.E. Experiences from two-years’ through-ice AUV deployments in the high arctic. In Proceedings of Autonomous Underwater Vehicles, 2008. AUV 2008. IEEE/OES, Woods Hole, MA, USA, 13–14 October 2008; pp. 1–7.
- Wadhams, P.; Wilkinson, J.P.; McPhail, S.D. A new view of the underside of arctic sea ice. Geophys. Res. Lett. 2006, 33, L04501. [Google Scholar] [CrossRef]
- Morey, R.M.; Kovacs, A.; Cox, G.F.N. Electromagnetic properties of sea ice. Cold Reg. Sci. Technol. 1984, 9, 53–75. [Google Scholar] [CrossRef]
- Rexford, M.; Morey, M.; Kovacs, A. Investigation of the electromagnetic properties of multi-year sea ice. In Proceedings of Arctic Matters Conference, Narssarssuaq, Greenland, 1985; pp. 151–167.
- Kovacs, A.; Morey, M.; Cox, G.F.N. Modeling the electromagnetic property trends in sea ice, part I. Cold Reg. Sci. Technol. 1987, 14, 207–235. [Google Scholar] [CrossRef]
- Goodman, R.H.; Fingas, M.F. Detection of oil-under-ice—A joint Esso/EPS project. In Proceedings of the 6th Annual Arctic Marine Oilspill Program Technical Seminar, Edmonton, Canada, 14–16 June 1983; Environmental Emergency Branch: Ottawa, Canada, 1983; pp. 207–214. [Google Scholar]
- Jackins, P.D.; Gaunaurd, G.C. Radar resonance reflection from sets of plane dielectric layers. J. Appl. Phys. 1982, 53, 6663–6670. [Google Scholar] [CrossRef]
- Goodman, R.H.; Dean, A.; Fingas, M.F. Detection of oil under ice using electromagnetic radiations. In Proceedings of 8th International Conference on Port and Ocean Engineering under Arctic Conditions, Narssarssuaq, Greenland, 7–14 September 1985; pp. 895–902.
- Tunaley, J.K.E. The scattering of electromagnetic waves from the sea-ice oil and sea-water interfaces. In Proceeding of 8th Annual Arctic Marine Oilspill Program Technical Seminar; Edmonton, Canada, 18–20 June 1985, Environment Canada: Ottawa, Canada, 1985; pp. 292–302. [Google Scholar]
- Tunaley, J.K.E.; Moorcroft, D.R. Aspects of the detection of oil under sea ice using radar methods. In Proceeding of 9th Arctic Marine Oilspill Program Technical Seminar, Edmonton, Canada, 10–12 June 1986; Environment Canada: Ottawa, Canada, 1986; pp. 463–474. [Google Scholar]
- Moorcroft, D.R.; Tunaley, J.K.E. Electromagnetic resonance in layers of sea ice over sea water. In Proceedings of 8th Annual AMOP Technical Seminar, Edmonton, Canada, 18–20 June 1985; Environment Canada: Ottawa, Canada, 1985; pp. 269–286. [Google Scholar]
- MacDougall, J.W.; Tunaley, J.K.E. The complex permittivity of crude oil. In Proceeding of 9th Arctic Marine Oilspill Program Technical Seminar, Edmonton, Canada, 10–12 June 1986; Environment Canada: Ottawa, Canada, 1986; pp. 413–420. [Google Scholar]
- Cassidy, N.J. Processing, modelling and analysis. In Ground Penetrating Radar Theory and Applications; Jol, H., Ed.; Elsevier: Amsterdam, The Netherlands, 2008; pp. 141–176. [Google Scholar]
- Butt, K.; O’Reilly, P.; Reimer, E. A field evaluation of impulse radar for detecting oil in and under sea ice. In Oil and Gas under Sea Ice Experiment; Dome Petroleum: Alberta, Canada, 1981; p. 169. [Google Scholar]
- Goobie, G.I.; Laidley, T.W.; Reimer, E.W. C-CORE Oil Spill Research Activities; C-CORE: Kanata Ontario, Canada, 1981; pp. 623–643. [Google Scholar]
- Bradford, J.H.; Dickins, D.F.; Brandvik, P.J. Assessing the potential to detect oil spills in and under snow using airborne ground-penetrating radar. Geophysics 2010, 75, G1–G12. [Google Scholar] [CrossRef]
- Bradford, J.H.; Dickins, D.F.; Brandvik, P.J. Airborne GPR to Detect Oil under Snow; SINTEF Report No. 24; SINTEF Materials and Chemistry: Trondheim, Norway, 2010. [Google Scholar]
- Dickins, D.; Bradford, J.; Liberty, L.; Hirst, B.; Owens, E.; Jones, V.; Gibson, G.; Zabilansky, L.; Lane, J. Testing ground penetrating radar and ethane gas sensing to detect oil in and under ice. In Proceeding of 28th Arctic Marine Oilspill Program Technical Seminar, Calgary, Canada, 7–9 June 2005; Environment Canada: Ottawa, Canada, 2005; pp. 799–824. [Google Scholar]
- Dickins, D.F.; Brandvik, P.J.; Bradford, J.; Fakness, L.-G.; Liberty, L.; Daniloff, R. Svalbard 2006 experimental oil spill under ice: Remote sensing, oil weathering under arctic conditions and assessment of oil removal by in-situ burning. In Proceedings of the 2008 International Oil Spill Conference, Savannach, GA, USA, 4–8 May 2008.
- Bradford, J.H.; Liberty, L.M.; Dickins, D.F. Locating oil spills under sea ice using ground-penetrating radar. Lead. Edge 2008, 27, 1424–1435. [Google Scholar] [CrossRef]
- Bryce, P. Design considerations for arctic subsea pipeline leak detection systems. In Proceedings of the International Oil and Ice Workshop 2000—Technical Program, Anchorage, AK, USA, 7–10 April 2000.
- Hirst, B.; O’Connor, S. Measurement of Methane Emissions from Oil Spill Experiments at Svea Test Site,Svalbard,April 2007; SINTEF Report No. 23; SINTEF Materials and Chemistry: Trondheim, Norway, 2010. [Google Scholar]
- Nedwed, T.; Srnka, L.; Thomann, H. Remote detection of oil spilled under ice and snow using nuclear magnetic resonance. In Proceeding of 31st Arctic Marine Oilspill Program Technical Seminar, Ottawa, Canada, 2–5 June 2008; Environment Canada: Ottawa, Canada, 2008; pp. 693–702. [Google Scholar]
- Palandro, D.; Nedwed, T.; Srnka, L.; Thomann, H.; Fukushima, E. Using nuclear magnetic resonance in the earth’s magnetic field to detect oil under ice. In Proceeding of 36th Arctic Marine Oilspill Program Technical Seminar, Nova Scotia, Canada, 4–6 June 2013; Environment Canada: Ottawa, Canada, 2013; pp. 515–521. [Google Scholar]
- Babiker, M.; Kloster, K.; Sandven, S. The Utilization of Satellite Images for the Oil in Ice Experiment in the Barents Sea, May 2009; SINTEF Report No. 29; SINTEF Materials and Chemistry: Trondheim, Norway, 2010. [Google Scholar]
- Brown, C.E.; Fingas, M.F.; An, J. Laser fluorosensors: A survey of applications and developments of a versatile sensor. In Proceeding of 24th Arctic Marine Oilspill Program Technical Seminar, Alberta, Canada, 12–14 June 2001; Environment Canada: Ottawa, Canada, 2001; pp. 485–493. [Google Scholar]
- Brown, C.E.; Fingas, M.F. Review of the development of laser fluorosensors for oil spill application. Mar. Pollut. Bull. 2003, 47, 477–484. [Google Scholar] [CrossRef]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
MDPI and ACS Style
Fingas, M.; Brown, C.E. Detection of Oil in Ice and Snow. J. Mar. Sci. Eng. 2013, 1, 10-20. https://doi.org/10.3390/jmse1010010
AMA Style
Fingas M, Brown CE. Detection of Oil in Ice and Snow. Journal of Marine Science and Engineering. 2013; 1(1):10-20. https://doi.org/10.3390/jmse1010010
Chicago/Turabian StyleFingas, Merv, and Carl E. Brown. 2013. "Detection of Oil in Ice and Snow" Journal of Marine Science and Engineering 1, no. 1: 10-20. https://doi.org/10.3390/jmse1010010