Review on Inlet/Outlet Oil Coordinated Control for Electro-Hydraulic Power Mechanism under Sustained Negative Load


1
School of Automation Science and Electrical Engineering, Beihang University, Beijing 100191, China
2
School of Aeronautic Science and Engineering, Beihang University, Beijing 100191, China
*
Author to whom correspondence should be addressed.
Appl. Sci. 2018, 8(6), 886; https://doi.org/10.3390/app8060886
Submission received: 26 April 2018
/
Revised: 20 May 2018
/
Accepted: 23 May 2018
/
Published: 28 May 2018
(This article belongs to the Special Issue Power Transmission and Control in Power and Vehicle Machineries)
Abstract
:Speed control and smooth regulation in an electro-hydraulic motion control system under negative load (over-running load) are crucial to mobile machineries, vehicles, and motion simulation equipment. Problems, such as bad natural stability, bad dynamic performance for small adjusting signal, serious coupling, and difficulty to coordinate between speed smoothness and speed regulation, exist in traditional valve-controlled and pump-controlled electro-hydraulic power mechanism. The coordinated motion control scheme, which is based on independent regulation of inlet/outlet oil for electro-hydraulic power mechanism has attracted the attention of many scholars. In the last two decades, many progresses had been made in coordinated control technology, employing in inlet/outlet independent metering and pump/valves independent regulation. Moreover, the technology has been widely used in the electro-hydraulic operating system in hydraulic excavator and the speed smoothness control system in heavy transport vehicles. In this study, recent advancements and upcoming trends in coordinated control and inlet/outlet independent metering for electro-hydraulic power mechanism under sustained negative load are reviewed. Firstly, related research advancements are summarized, including flow rate regulation mechanism based on inlet/outlet coordinated control, coordinated control strategy and nonlinear control method of electro-hydraulic control system. Then, nonlinear modeling of inlet/outlet independent metering and pump/valves independent regulation in electro-hydraulic control system is presented. In addition, the electro-hydraulic speed smoothness control and energy recovery for heavy engineering vehicles under long down-slope is discussed and reviewed. Finally, existing problems and future trends of inlet/outlet coordinated control for an electro-hydraulic power mechanism under sustained negative load are presented.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
Various types of heavy construction machinery and engineering vehicles [1] are playing an increasingly important role in the construction of large-scale projects, such as high-speed railway, highways, large bridges, as well as the construction of underground tunnels for coal mining. The working condition under sustained negative load is common in electro-hydraulic loading control system [2]. Then, the traveling drive system, hoist system and swing system of construction machineries and engineering vehicles are inseparable from the electro-hydraulic power mechanism under sustained negative load. As the crucial technology of above systems, the control technology of electro-hydraulic power mechanism has greatly influenced the control performance for construction machinery and engineering vehicles. Therefore, systematic study on advanced regulation mechanism and control strategy for electro-hydraulic power mechanism with negative load is of great value, which enhances integrated control performance for overall electro-hydraulic mechanism.
Sustained negative load, also known as over-running load, often occurs in long down-slope condition in traveling system of mobile machines, descending condition under heavy load in electro-hydraulic hoist systems of hoisting cranes, swinging and boom sticks conditions in excavators, and negative load condition of electro-hydraulic loading systems. Negative load operation is inevitable and standard working condition to a completed task cycle. The characteristics of negative load in electro-hydraulic power system is that the load force’s direction is in accordance with the orientation of load movement, and the function of load force is changed from opposing motion to driving motion. In fact, the running speed of moving parts will continuously increase due to the increase of driving force incorporating the force from negative load. But the speed may even exceed the actuating components’ maximum running speed which can be provided by flow rate of the hydraulic pump. Moreover, the dithering phenomenon in the process of system running can easily cause safety accidents.
Aiming at the method of traditional flow rate regulation for electro-hydraulic control system with sustained negative load, two control modes are usually used. One mode is the valve-control mode, which uses dual-port mechanical linkage control valve to realize the throttling regulation. The other mode is the pump-control mode, which uses proportional or servo variable displacement pump to achieve the volume regulation. The former adopts inlet/outlet mechanical coupling metering, and a large valve-restriction pressure difference is needed for balancing the negative load. And the latter commonly adopts the balance valve in return-oil line to form the back-pressure for speed smoothness control. In the former case, because of the throttling and coupling control with dual-port mechanical linkage control valve, it is difficult to achieve superior control effect on speed control and smooth regulation. For the latter, since the balance valve can’t be actively regulated, the satisfactory control effect also can’t be obtained.
Under sustained negative load, the operating points of electro-hydraulic control valve for motion control system are in quadrants II and IV, and pressure flow coefficient of the valve is reduced, then control characteristics are deteriorated when the orifice is small. The coupling control with flow rate and load pressure in traditional electro-hydraulic mechanism results in a large valve-restriction pressure difference in inlet/outlet oil loop, then a good coordination between speed control and speed-smooth regulation cannot be realized. In references [3,4], the hydraulic balance method and the stability of balance valve under negative load are studied, and relevant hydraulic balance scheme is proposed. Aiming at the problem of down dithering and secondary sliding for hoisting system under negative load, Liu [5] designed a new balance valve cover with damping network, which makes the pressure into pilot control oil chamber of the balance valve steadier. Moreover, the balance valve and brake get a good matching for the time of opening and closing. In view of function exchange for motor and pump under sustained negative load, Xian [6] presented a negative torque control scheme for hoisting mechanism type in closed volume hydraulic system. In the control scheme, by reducing the displacement volume of pump or increasing the motor’s displacement volume, the speed of motor and engine keeps within the limit. Nie [7] proposed the constant power control for load input power, and it guarantees the optimal load rate of the engine. Moreover, the security and energy-saving for the crane under negative load is achieved.
At present, for inlet/outlet independent metering control system of electro-hydraulic power mechanism, the research mainly focuses on the multi-layer and coordinated control strategy and energy-saving control technology. Aiming at the existing problems of electro-hydraulic power mechanism under sustained negative load, a thorough and systematic study, such as, theoretical analysis of regulation mechanism, motion-force hierarchical control, inlet/outlet coordinated control strategy, unknown disturbance estimation of power mechanism, dynamic feature recognition for continuously running system with long time and strong robust control strategy are comparatively scarce. The coordinated motion control strategy based on inlet/outlet independent metering can be introduced for electro-hydraulic motion control system, through which controllability and practicability of control system is enhanced. Especially, the coupling problem of speed control and smooth regulation can be effectively solved. Moreover, the two independent control subsystems can be coordinately adjusted, which greatly improves the control potential for electro-hydraulic power control system.
The remainder of this paper is organized as follows: for the electro-hydraulic power control system, flow rate regulation mechanism based on inlet/outlet independent metering, coordinated control strategy, and nonlinear control algorithm are introduced in Section 2. Nonlinear modeling of inlet/outlet independent metering for pump/valves control system is elaborated Section 3. Section 4 provides electro-hydraulic speed smoothness control and energy recovery of heavy vehicles under long down-slope, followed by the main conclusions are summarized, and the future research works are prospected.
2. Inlet/Outlet Independent Regulation and Coordinated Control
Inlet/outlet independent regulation and coordinated control with hierarchical structure have been the focus of intensive research, resulting in a rich literature. In this section, the research fields, including flow-rate regulation mechanism of inlet/outlet independent metering control, coordinated control strategy, and nonlinear control algorithm are reviewed. Moreover, the current research statuses are summarized, and necessary analysis and evaluation is raised.
2.1. Flow-Rate Regulation Mechanism of Inlet/Outlet Independent Metering
Inlet/outlet independent metering system usually uses two electro-hydraulic control valves to determine the motion state of an actuator, which opens the mechanical connection between the inlet and outlet in ordinary electro-hydraulic control valve. The key question is how to coordinate the opening displacement of two spools in control valves, so that the coordinate control of pressure and flow rate can be realized. Because two throttle valves can be respectively responsible for flow rate control in inlet lines and back-pressure control in outlet lines, to reduce the throttling loss in inlet line at least is possible.
In 1987, Professor Backe [8] presented the conception of separate control of actuator ports with cartridge valve control theory, the control principle is shown in Figure 1. Through the input liquid resistance and output liquid resistance, pressure and flow rate of hydraulic cylinder chambers are independently controlled. Liquid resistances are realized in four cartridge valves. With the development of electronic technology, Backe applied electronic feedback control technology to hydraulic control system, further optimized the performance of the control system. The feedback signals, which are in the form of pressure feedback, flow rate feedback, speed feedback and acceleration feedback, realize the system feedback control function.
Palmberg [9] formally proposed the concept of inlet/outlet independent metering control. Four electro-hydraulic proportional poppet valves are used to realize the control of hydraulic actuators, and a constant pressure pump is selected for oil supply. In addition, the value and direction of the load are obtained by the measured pressures from two pressure sensors in two chambers, then different control strategies can be selected for optimal control according to the load and speed characteristics.
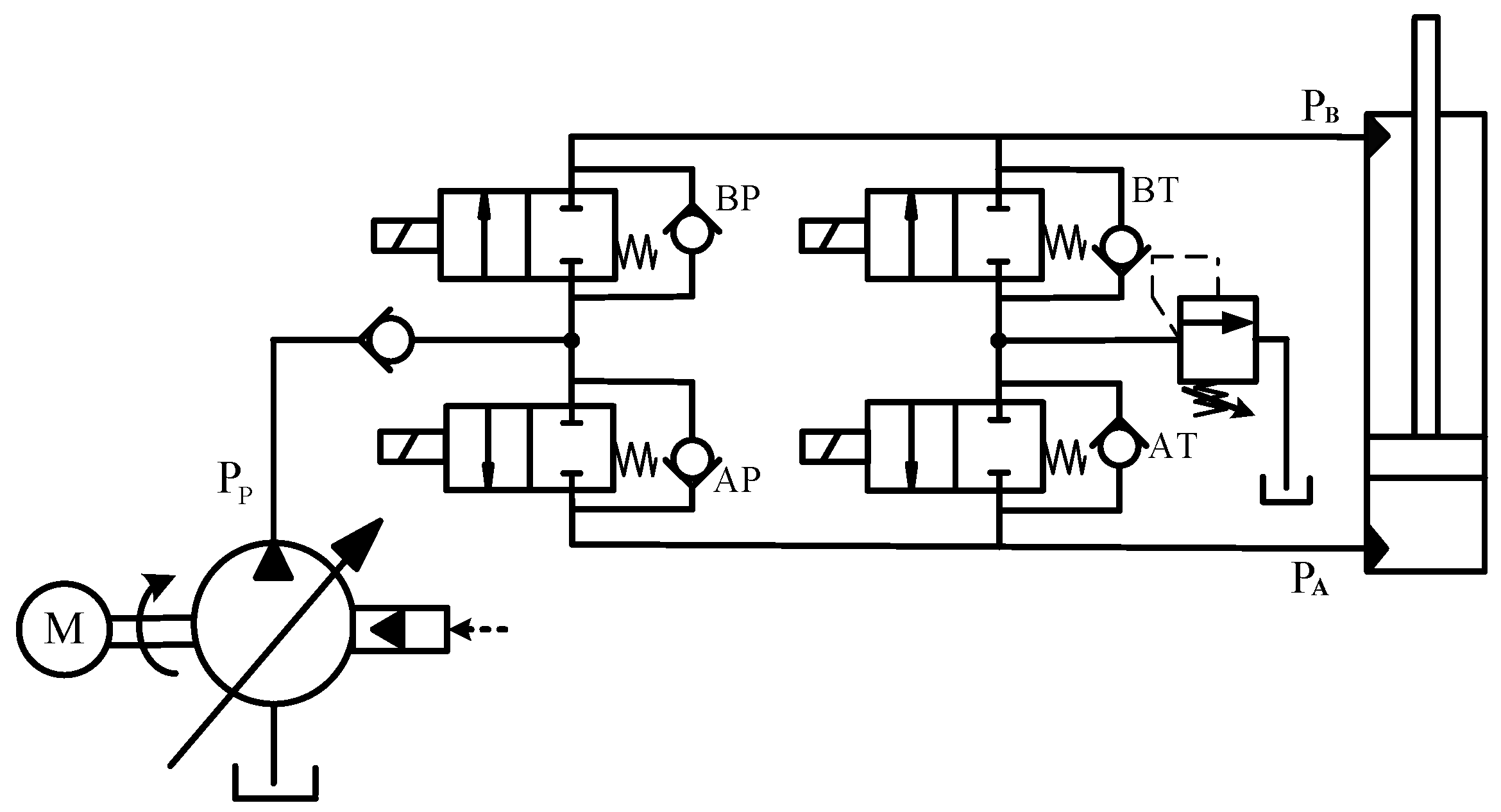
Book et al. [10] put forward the controllability and possibility of energy recovery under negative load, and the scheme adopts the inlet/outlet oil decoupling control through four-valve independent regulation. Moreover, the mathematical analysis and demonstration is derived. Compared to the traditional valve control system, the saving energy effect of the independent metering mechanism with four-valve can is better by controlling the back pressure. The electro-hydraulic system mechanism of four-valve independent regulation is shown in Figure 2.
Sphenoid et al. [11] further studied this kind of electro-hydraulic system controlled by four valves. Since the four valves can be independently controlled, the configuration scheme can be operated with a variety of double valves in independent control modes. In addition, the regulation modes of five different working conditions are summarized, which includes power extension, high side regeneration extension, low side regeneration retraction, power retraction, and low side regeneration extension.
Elfving M. et al. [12] studied the physical decoupling control of double chamber pressure for independent metering control system, where the two chambers of hydraulic cylinder respectively use an electro-hydraulic proportional valve for flow-rate or pressure control. In this control system, an auxiliary controller and two pressure controllers are designed. The pressure decoupling control of two chambers is achieved with two pressure controllers, and the speed control of actuator is realized by auxiliary controller.
Patrick et al. [13] proposed a new control method of automatic calibration state trajectory, and applied it to the flow rate control in independent metering system. The system uses five electric hydraulic lifting valves to form the independent metering control structure. The proposed control method is used to adjust four of these valves, with which the flow rate control of hydraulic actuator’s inlet/outlet oil is realized. Moreover, supply pressure is controlled by the fifth valve with open-loop operation. In view of the fact that the excavator system based on inlet/outlet independent metering control is a mechanical-hydraulic coupling system with many unknown parameters, Ding et al. [14] proposed the multi-objective optimization method based on nonlinear programming by quadratic Lagrangian (NLPQL). The optimal value of characteristic parameters, which are difficult to estimate, are found by the method, and the speed and accuracy of parameter identification are improved.
Zhang and Hu [15,16] designed an independent metering control system consisted of five independent proportional cartridge valves, which can be programmed to achieve flexible control of the system. Changing the control logics of the valves can achieve different median performance, and the system can realize system energy saving and regeneration without changing the hardware structure by proper programming. For inlet/outlet independent metering system, Professor Andersen [17,18] carried out the study on the control strategy and the influence of control performance by valve structural parameters. The electronic control handle transmits the speed signal instruction to system controller, and the system controller sends control signals to control the proportional directional valve on both sides of the actuator, then the speed control and pressure control of actuator are realized. Meanwhile, the performance of system energy saving is enhanced. In addition, because the throttle loss of check valve is much smaller than balance valve, the efficiency of system is improved by changing components.
In the middle of 1990s, Wang et al. [19,20] carried out a full study on the impact problems during the acceleration and deceleration, the starting and brake of the large inertia load in the hydraulic excavator. A pressure difference sensing technology is put forward to reduce the pressure impact, which is produced during the acceleration and deceleration of actuators. The control method of calculation flow rate feedback is adopted to control the flow rate of throttle valve, so that the speed smooth control is achieved for large inertia load. The core idea of control is to use a piecewise control method while the large inertia load is in the process of acceleration, deceleration and braking, and the method is based on actuator speed observation and parameters online estimation. Moreover, it takes account of its control accuracy of steady state as well as fast stability of dynamic process.
In references [21,22], the speed control characteristic of independent metering control system with multiple actuators is studied when actuators run at the same time. The synchronization model of the dual-actuator for independent metering system is established. Moreover, the controller is developed, which compares the speed control characteristics under different working conditions. Speed control method for piecewise adjustment according to the delay time of the balance valve is proposed, which improves the stability of speed control in balance valve circuit.
For independent metering control system, Quan et al. [23] proposed a control scheme for differential hydraulic cylinder, and this method can reduce power loss of electric motor by about 20%, which improves the efficiency of pump-controlled differential cylinder system. In addition, an inlet/outlet independent metering control system based on flow rate matching with pump and valve was put forward. The system ensures that the output flow rate of power source always matches the required flow rate by all the actuators, and it not only achieves the implementation of the individual executor, but also reduces throttle loss of the system to a minimum.
Yuan [24] studied the control technology of inlet/outlet independent metering, which uses a double servo valve to control the cylinder system. Furthermore, an adaptive robust control method based on correction of quiescent operation point is proposed. Aiming at the pump/valves control strategy for an electro-hydraulic flow rate matching system, Cheng et al. [25] analyzed the requirements with speed control system under overrunning and impedance conditions, and an improved method of dynamic performance based on compensation with proportional valve is proposed. The proportional valve controller, which considers the compensation of dynamic and static performance at the same time, is developed to improve the performance of speed control system. A typical electro-hydraulic flow rate matching system mechanism of pump/valves control is shown in Figure 3.
Dong [26] designed a flow-rate and pressure coupling controller to control the piston speed and pressure in each chamber, and a double closed loop control in independent metering control system is used to monitor and modify the pressure and flow rate in real time. Moreover, four types of threads are designed to arrange the task. In reference [27], a programmable valve with inlet/outlet independent metering control is applied to replace the multi-way directional valve in construction machinery, which integrates the advantages of digital signal and inlet/outlet independent metering technology. Due to the increase of control freedom of electro-hydraulic system in construction machinery, the controllability of the control system is improved, and the energy consumption of system cut down by reducing the back pressure of hydraulic actuator.
Li [28] put forward a novel flow rate amplifier valve with digital pilot, where the digital valve is the pilot stage and the Valvistor valve is the main stage. Furthermore, applying it to independent metering control system, not only realizes the requirements of control performance and energy saving of valve control system, but also lays the foundation for realizing modern intelligent control of electro-hydraulic system. Liu et al. [29] used a flow-rate feedback calculation control and pressure calculation control for independent metering system under negative load condition to improve the speed stability. Liu [30] presented a direct proportional flow rate control by pressure compensation with load control valve. In this valve, the flow rate through load control valve is proportional to the pilot pressure in the control stroke, and load pressure compensation function means that when the load pressure is too high, the flow rate of load control valve can be limited to the vicinity of the maximum rated flow. Addressing the control for the speed system of pump controlled parallel variable displacement motor with the flow rate adaptive distribution and multiplying nonlinear link characteristics, Zheng et al. [31] proposed a compound control architecture, which realizes pressure control by variable displacement pump and speed control of drive shafts by variable displacement motors. The second order linearization models of pressure control system and speed regulating system are derived, and the expected pressure planning method is proposed to realize the dynamic pressure regulation of the system. In addition, by introducing a disturbance observer to the speed controller of variable displacement motor, the nonlinear disturbance and unknown load disturbance are suppressed, which improves the steady state accuracy with fluctuating pressure.
From above-surveyed on flow rate regulation mechanism for inlet/outlet independent metering control system, the most important research aspects are summarized, and listed below.
- The inlet/outlet independent metering control has become an important research direction for electro-hydraulic power mechanism. It not only improves the accuracy and stability of the motion control system, but also possibly realizes the energy saving and regeneration. While maintaining the excellent dynamic performance of the electro-hydraulic control system, how to increase the energy efficiency of system has become an important research topic.
- With the relatively large amount of attention devoted to valve-controlled cylinder systems, references are comparatively scarce on independent and coordinated control of pump/valves for pump-controlled motor system. However, the study on inlet/outlet independent metering control for pump-controlled motor system also has important practical value in engineering application.
- For the inlet/outlet independent metering control of electro-hydraulic system, while adopting different control strategies and structural parameters of the valve, the control performance and energy-saving efficiency are affected to a certain extent, which has been the focus of intensive research.
- As new hydraulic components, the digital programmable valve and novel flow rate amplifier valve with digital pilot are applied to the independent metering control system, which promotes the modern intelligent control for electro-hydraulic system. However, most of the digital valves currently studied are only as high-speed on-off valves. Because of the limitation with their structure, it can only be applied to pilot control and small flow rate control applications.
- The key issue of the study on inlet/outlet independent metering control system is to coordinate control variables of double electro-hydraulic control elements, which usually includes the flow-rate and the pressure regulation. Therefore, considering the system under different working modes, independent and coordinated regulation mechanism based on motion-force hierarchical control architecture is always an important research topic.
- The function exchange of motor and pump under sustained negative load seriously affects the dynamic stability performance for motion control system. Aiming at the problem, development of speed smoothness control strategy with motion-force hierarchical structure have been an urgent problem to be solved.
- With sustained negative load in engineering applications, the study of regulation mechanism for suppressing negative load and integrated energy management scheme are of great practical value for electro-hydraulic motion control system.
2.2. Control Strategy for Electro-Hydraulic Control System
The nonlinear characteristics and modeling uncertainty of electro-hydraulic system seriously restrict the improvement of control performance for electro-hydraulic system, which cause the classical control method based on linear theory gradually unable to meet the requirements for high performance system. Nonlinear control method and active disturbance rejection control technology based on uncertainty disturbance have become an urgent need. In addition, in view of electro-hydraulic motion control under sustained negative load, speed smooth control, and energy saving control have become new and important research topics. The coordinated control based on inlet/outlet independent metering system and motion-force hierarchical architecture also have become the effective solutions, and an intensive study in this field will play an important role in improving the performance and energy saving of electro-hydraulic motion control system. This section overviews the nonlinear control algorithm and hierarchical coordination control strategy for electro-hydraulic control system, and necessary analysis is carried out.
2.2.1. Nonlinear Control Algorithm of Electro-Hydraulic Control System
There are many nonlinear characteristics in the electro-hydraulic control system, such as the pressure and flow rate nonlinearity in servo valve, the structure nonlinearity of differential equation, the friction nonlinearity of actuators, and so on. And these nonlinear factors and questions in the most electro-hydraulic servo systems are inevitable to solve. Therefore, more advanced nonlinear control methods need be studied for the electro-hydraulic control system with nonlinear factors.
Addressing the uncertainties in nonlinear control systems, Astrom and Utkin et al. developed various nonlinear control methods, such as adaptive control and variable structure sliding mode control. In the 1990s, Kokotovic et al. proposed the idea of backstepping control for the mismatched and uncertainty problem in electro-hydraulic control, where the core is how to overcome all kinds of uncertainties in nonlinear models. Niksefat and Sepehri et al. [32] established the nonlinear models for the electro-hydraulic actuator (EHA), and the robust controller of EHA based on the quantitative feedback theory (QFT) is designed. Meanwhile, the LuGre friction model is introduced to EHA model, the adaptive observer is used to estimate the actuating cylinder acceleration and the friction state, which cannot be observed directly. Moreover, the adaptive control law is designed to compensate the parameters perturbation and load disturbance of the system. For the nonlinear model of EHA, Alleyne and Kaddissi [33,34] designed the backstepping controller, which meets the stability of Lyapunov, obtaining a good control effect.
Bjorn [35,36] applied the existing nonlinear control strategy to inlet/outlet independent metering control system, and the method with linear quadratic Gaussian (LQG) optimal control is proposed. In addition, the speed and pressure controller of the independent metering control system is also designed, which is applied to electro-hydraulic system of the crane. In order to test the actuator controlled by direct drive valve (DDV), Nam et al. [37,38] developed the dynamic load simulator, and the robust controller for loading system is designed, which is based on the quantitative feedback control technology (QFT). For electro-hydraulic loading system, Ahn et al. [39,40] proposed a fuzzy proportional-integral-derivative (PID) intelligent control algorithm, which combines with the fuzzy control algorithm, grey scale prediction, and PID control.
In order to solve the issue that fluid bulk elastic modulus is difficult to quantify, Bora [41] developed a control design process, where additional sensors are not needed. Moreover, the design process makes the variables in bulk modulus have robustness. Garett et al. [42] presented the derivation of nonlinear tracking control law for a hydraulic servo system. An analysis of the nonlinear system equations is used in the derivation of a Lyapunov function that provides for exponentially stable force trajectory tracking. Furthermore, this control law is then extended to provide position tracking. Addressing the nonlinear systems with unknown input dead-zones, Hu et al. [43] proposed the direct/indirect adaptive robust control combining with the desired compensation strategy to synthesize practical high performance motion controllers for precision electrical drive systems. Even if the overall system is subjected to parametric uncertainties, time varying disturbances, and other uncertain nonlinearities, certain guaranteed robust transient performance and steady-state tracking accuracy can be achieved. For multi-degree of freedom system, Takahiro et al. [44] expanded the diagonalization method based on the modal space disturbance observers, which suppresses the interferences between the position control and force control of the system. As a result, the bilateral control is realized, and that performance is better than the coordinated control. Aiming at the problem on system state and interference estimation for slotted hydraulic, Pillosu et al. [45] linearized the nonlinear dynamics system and designed an estimation algorithm based on sliding mode control and nonlinear disturbance observer. For the high nonlinearity and non-differentiable features of electro-hydraulic control system, Claude et al. [46] used indirect backstepping adaptive control strategy to achieve the real-time position control.
On the basis of the improved state observer, Yang et al. [47] proposed a new model reference adaptive control algorithm for nonlinear systems with significant uncertainties. Moreover, the algorithm adopts neural networks to improve transient and steady-state performance, and the stable tracking performance is met. For a class of linear systems with uncertain external disturbances, Zhang et al. [48] designed a memory-based adaptive output feedback sliding mode controller, which improves the transient performance for linear systems. Chiang et al. [49] proposed an adaptive fuzzy controller with self-tuning fuzzy sliding mode compensation for electro-hydraulic displacement-controlled system. Furthermore, the controller has online adjustment capability by controlling the rule parameters, which can deal with the time-varying and non-linear uncertainty behavior of the system. In reference [50], aiming at the system nonlinearities and uncertain parameters for high performance force control of hydraulic load simulator, a discontinuous projection-based nonlinear adaptive robust force controller is presented, which makes the system asymptotically stable. Moreover, it realizes the transient performance and final tracking accuracy. Considering the nonlinear input and input dead zone, Triet et al. [51] proposed an adaptive fuzzy sliding mode controller for speed control system, which is driven by hydraulic pressure coupling. And the controller combines direct adaptive fuzzy and fuzzy sliding mode, which reduces the tracking error and jitter in new structure.
Aiming at multi-input and multi-output nonlinear control system with inlet/outlet oil independent metering control, Liu [52] raised a force calculation controller based on the feedback linearization, where the controller can calculate the reference pressure in the two chamber of hydraulic cylinder. Furthermore, PID controller is used to achieve the closed loop tracking control of two chambers’ pressure. During the operation of the excavator’s boom lowering, the balance valve is usually used to suppress the sustained negative load, which causes the hydraulic system to generate a large amount of heat. In view of the serious heating problem, Jin and Wang [53] proposed proportional throttle valve to balance the negative load. And an adaptive backstepping controller is designed, which maintains the inlet oil pressure of single-acting cylinder at a small value, then the goal of system energy saving is achieved.
In view of the uncertain nonlinear systems with parametric uncertainties and uncertain nonlinearities, Yao et al. [54] proposed an active disturbance rejection adaptive controller for tracking control, and the controller effectively combines adaptive control with extended state observer by backstepping method. Moreover, system uncertainties are estimated by extended state observer and compensated in a feedforward way. Aiming at the trajectory tracking problem for a Delta robot with uncertain dynamical model, Luis et al. [55] raised the output-based adaptive control based on the active disturbance rejection control (ADRC) technique. Furthermore, the simultaneous observer-identifier scheme is designed. The experimental results show that the adaptive control based ADRC has better control performance than the conventional PID controller with feedforward actions and regular ADRC. Addressing the vibration attenuation problem for vehicle suspension system, Li et al. [56] applied the ADRC technique to the industrial applications of active vehicle suspension system, the controller exhibits good robustness and easy implementation. Moreover, the total disturbance of vehicle suspension system is estimated and compensated in the controller via extended state observer. Among all of the experiments, the vehicle suspension system with ADRC shows a best performance under different road profile.
2.2.2. Hierarchical Coordination Control Strategy of Electro-Hydraulic Control System
With the increase of control performance requirement and complexity of control system, the decoupling control for multivariable and complex systems is no longer able to achieve the design requirements. However, for many electro-hydraulic control systems, it is not required to decouple the variables, but to maintain a certain coordination of multiple variables in control process. Therefore, the hierarchical and coordinated control of electro-hydraulic control system becomes an important research field.
Multivariable decoupling control is widely used in multivariable and complex electro-hydraulic control system, and the working principle is that the coupling between controllers is used to remove the coupling effect of controlled plant. Moreover, the multivariable control system with coupling effect is decomposed into several single variable control subsystems to regulate separately. In 1960, the first international federation of automatic control and Chinese scholar Tu Xuyan first proposed the multivariable coordinated control theory. It is not only different from the non-interactional control put forward by American scholars, but also different from the theory of self-regulation by Soviet scholars.
At present, the idea of hierarchical coordination control has been widely used in different professional fields. Moghadam et al. [57] developed a hierarchical optimal controller, which is simultaneous to control both the machining force and the axis position. The whole milling process is divided into two stages, and the two level targets are adjusted in the feasible range by weight. However, during the transient process, a series of simulations show that the control method can only make one target performance better. In order to enhance the vehicle dynamics stability and handling performance for electric vehicle, an optimal two-layer control scheme with hierarchical structure is proposed in the reference [58]. In fact, the upper controller based on sliding-mode control is in charge of motion regulation, where the desired longitudinal and lateral forces and yaw moment is calculated for keeping vehicle dynamics stability. The lower layer assigns the driving/braking torques to each in-wheel motor with an optimization algorithm. Moreover, considering motor power capability and tire workload, a cost function with adjustable weight coefficients is designed. The optimal control scheme with hierarchical structure for electric vehicle is shown in Figure 4.
Wu et al. [59] developed a hierarchical control architecture based on the Takagi-Sugeno (T-S) fuzzy model. Even if there are serious behavior changes of boiler steam turbines, the hierarchical control can achieve the optimal control. Yao [60,61] developed the controller for an independent metering control system with five cone valves, and the control characteristics is studied deeply. The two-layer controller included the nonlinear robust adaptive controller and PID are designed, which achieves trajectory tracking control and energy saving control. Moreover, the control system is composed of five cone valves, where four valves are used for independently regulating the flow rate and pressure in two chambers of actuator, and one valve is directly connected with the two cylinders for energy regeneration. In addition, the two-layer controller is used for mode selection and flow-pressure control with proportional valve, which includes the upper level controller with task switching and the lower layer controller with flow-pressure control. Furthermore, both the pressure controller and flow rate controller adopt robust adaptive control based on the nonlinear system model.
Aiming at power distribution and coordination problem for the earth moving vehicle, Zhang et al. [62] developed a generalized model for the multi-input and multi-output electro-hydraulic transmission system, which adopts the method with linearization of nominal work points. Moreover, the controller based on H2 and H∞ is designed for the control system. For the synchronous control strategy of multi mechatronic control systems, since the coupling compensation rules is difficult to be determined, and the amount of online computing is very large, Zhang et al. [63] put forward a synchronous control idea with the minimum number of related axes. Moreover, the synchronization control algorithm, which is based on the theory of adjacent coupling error and sliding mode control, is developed. For the system model with large model uncertainties and external disturbances, Fang et al. [64] proposed a cross-coupling control (CCC) algorithm, which is based on Lyapunov stability criterion and recursive updating technology. Indeed, the contour performance is obviously enhanced by coordinating the motion of multiple axes.
In order to solve the motion synchronization problem for double-cylinder electro-hydraulic elevator system, Sun and Qiu [65] presented a nonlinear control algorithm including two-layer coordination controller. The synchronization controller of outer loop motion is designed, which is based on robust control technique on linear multi input and multiple output (MIMO) control system. Furthermore, the inner loop pressure controller for lifting oil cylinder is developed on the basis of disturbance observation for nonlinear single input and single output (SISO) control system.
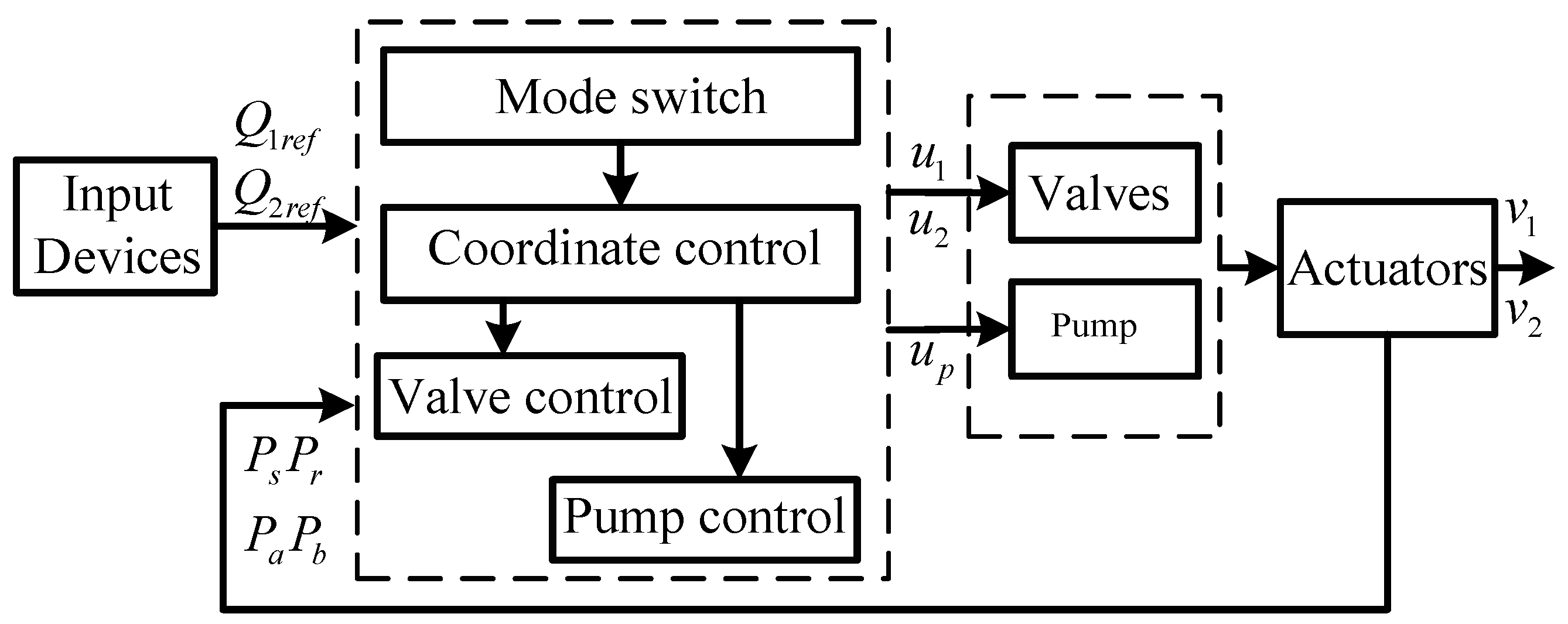
Aiming at the cylinder synchronous control system based on independent metering control system, Zhu et al. [66] proposed a coordinated control strategy to realize the synchronous motion control of two cylinders. In case of the slight fluctuation of friction force, an adaptive robust pressure controller is designed to keep the pressure stable in the cylinder cavity, which is beneficial to the accurate modeling of friction force. In addition, an adaptive robust controller is designed to improve motion tracking accuracy of the cylinder, and the model compensation via the on-line assessment with flow rate coefficient is enhanced. For inlet/outlet independently metering control of electro-hydraulic system, Xu et al. [67] proposed a three-level controller to improve the energy utilization efficiency of system. The upper level controller selects the appropriate operating mode by the requirement of load and command speed. The lower level controller not only includes speed controller with the calculation flow rate feedback and pressure controller with back-pressure feedback, but also includes the flow rate controller by variable displacement pump. The middle level achieves the coordinated control between pump-control and valve-control, so that the opening of the inlet valve can be kept as large as possible. Due to the regulation of backpressure control and flow rate control, the system pressure loss is reduced to a minimum, and the energy saving control of the system is realized. The control scheme of independent metering valves-pump system for energy saving is shown in Figure 5.
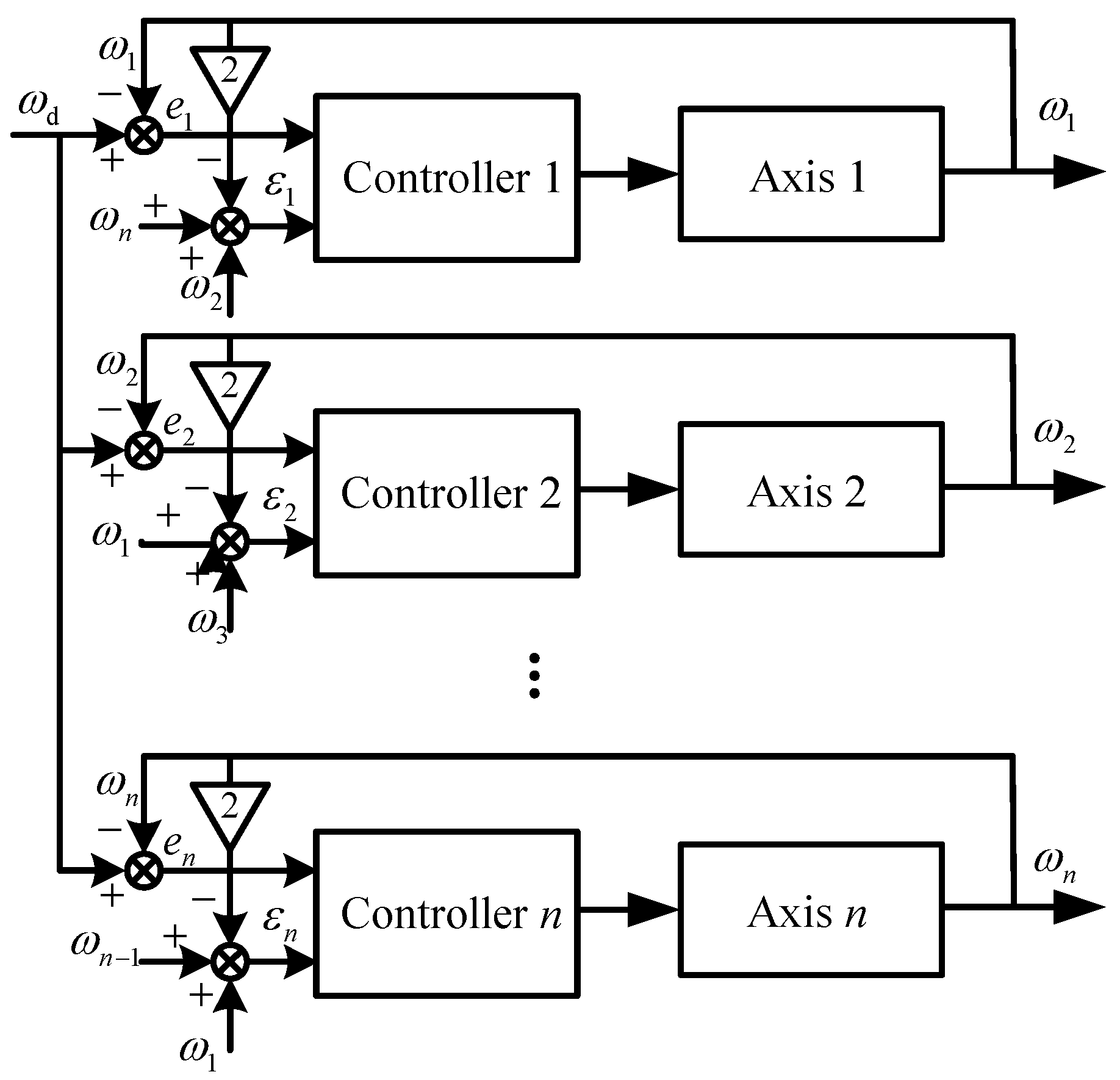
In order to realize coordinated control of multi-hydraulic-motor traveling system, the influence of different characteristics amount on every hydraulic motor driving subsystem is considered. Zheng et al. [68] put forward the adjacent cross-coupling strategy on the basis of the basic control law with the tracking error, which introduces the tracking errors of the adjacent two axes into the controller of local axis. The structure of multi-axis coordinated motion system based on adjacent cross-coupling strategy is shown in Figure 6.
From above-surveyed on the control strategy for electro-hydraulic control system, the most important research aspects are summarized, and listed below.
- Because of nonlinear characteristics in electro-hydraulic control system, such as the nonlinearity of pressure and flow rate in servo valve, the structure nonlinearity of differential equation, traditional linear control theory has been unable to meet the requirements of high precision control system. Therefore, advanced nonlinear control method based on nonlinear model are always an important research topic.
- With the rapid development of intelligent control algorithm, the compound control method incorporated intelligent control algorithm and modern control is the trend of future development.
- With the improvement of control performance requirements and complexity for electro-hydraulic motion control system, the motion-force hierarchical and coordinated control based on independent metering control has applied in operating control system of hydraulic excavator and speed smoothness control system of heavy transport vehicles. However, electro-hydraulic speed smoothness control and energy recovery for construction machineries and engineering vehicles have been an urgent problem to be solved.
- Aiming at the influence of various kinds of uncertainties and unknown disturbances in electro-hydraulic motion control system, the active disturbance rejection control (ADRC) technique assigns all uncertainties to the total disturbance of system and gives estimation and compensation. Moreover, because of the good robustness and easy implementation, the ADRC will be very useful in industrial applications. Then, ADRC and compound control strategy based on ADRC are new research focus for electro-hydraulic motion control system.
- Based on independent metering control and hierarchical control for electro-hydraulic motion control system, motion-force control algorithm incorporated intelligent control algorithm become a new research topic.
3. Nonlinear Modeling of Independent Metering Control for Electro-Hydraulic Mechanism
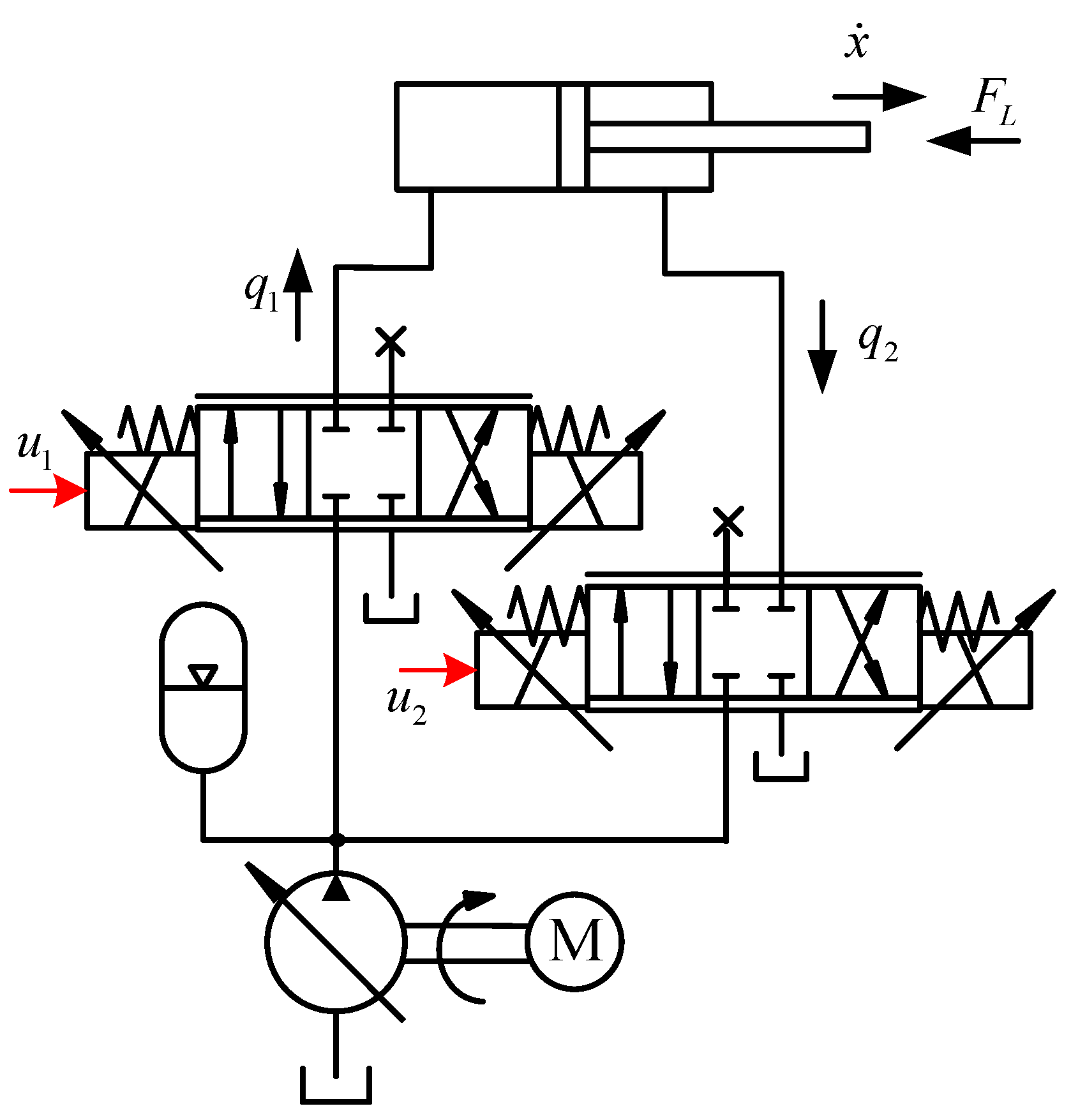
3.1. Non-Linear Modeling of Dual-Valve Independent Metering Control System
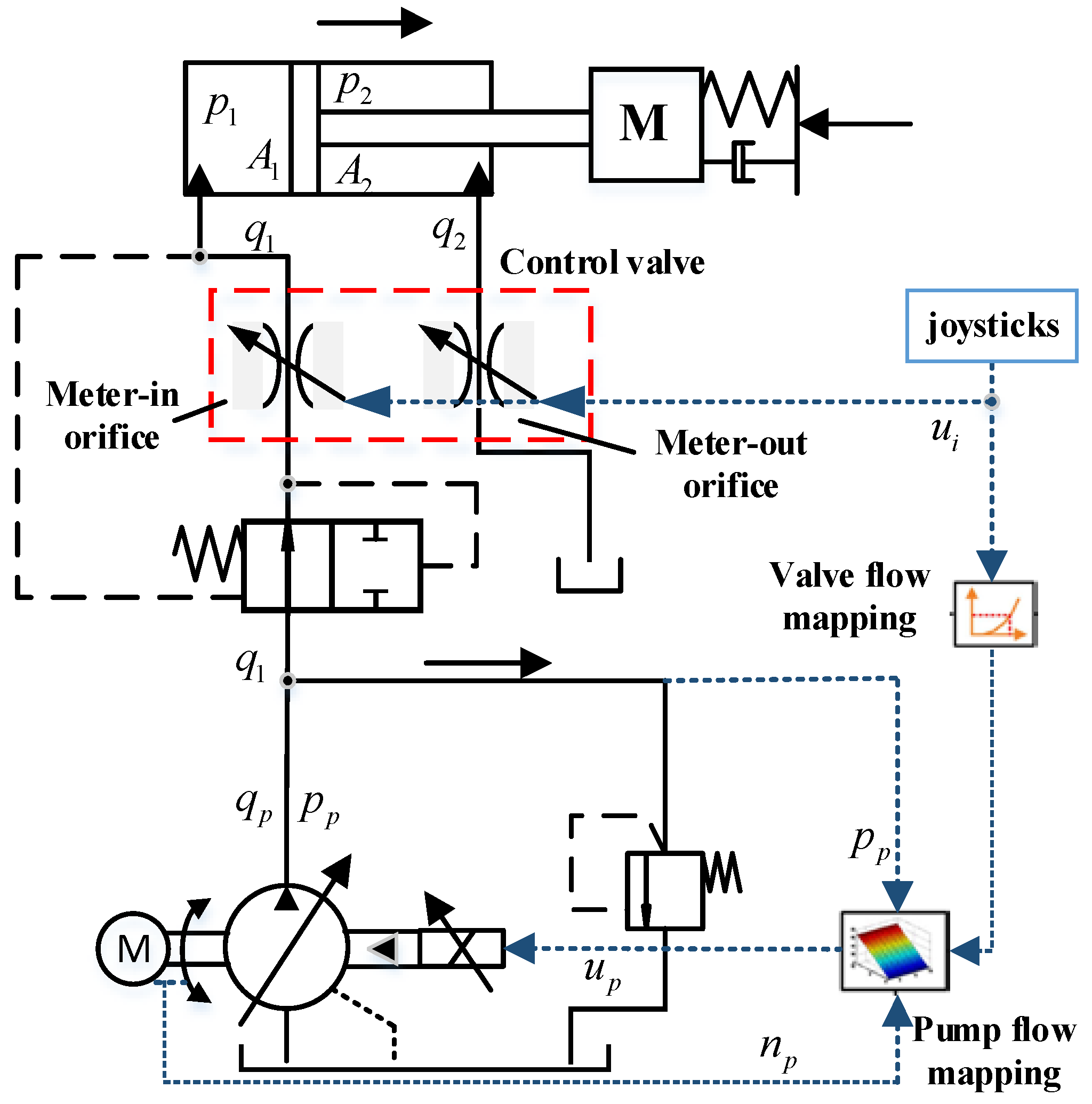
A dual-valve independent metering control system of electro-hydraulic power mechanism is shown in Figure 7. The pressure and flow rate in inlet/outlet oil chambers of actuator are controlled by a servo valve or proportional valve separately. On the basis of force balance equation and flow rate continuum equation with two working chambers, the nonlinear tracking control law for electro-hydraulic motion control system is designed.
The nonlinear tracking control law mainly includes speed regulation loop and speed smoothness control loop. In the former control loop, the reference pressure of actuator inlet chamber is obtained from the desired running speed. And the reference backpressure of actuator return chamber is obtained by calculating the balanced negative load. Through the coordinated control with pressure in inlet/outlet oil chamber of actuator, the expected driving force can be tracked by hydraulic driving force, then the tracking control of the motion control system can be realized.
Dynamic equation of servo valve can be approximated by the first-order, and it is described as:
where , , , and are the spool displacement, servo valve time constant, the control input, and the gain of the spool displacement to the input of the servo valve, respectively.
Flow rate equation of servo valve port can be described as:
where , , , and are respectively throttle valve orifice flow coefficient, servo valve orifice area gradient, servo valve spool displacement, and hydraulic oil density, respectively. , , and are respectively the outlet pressure of the oil pump, the pressure of rodless chamber and the pressure of rod chamber of the hydraulic cylinder.
Continuous flow rate equation of hydraulic cylinder inlet oil chamber and return oil chamber:
where , , , , , , and are respectively the elastic modulus of hydraulic oil, initial volume of inlet oil chamber and return oil chamber of hydraulic cylinder, respectively. In addition, the impact of system oil leakage is ignored in above equation.
The following equation represents the dynamic behavior of motion control system:
where, , , , , and are the effective piston area of the two chambers of cylinder, effective viscous damping coefficient, mass of load, output displacement, and external load interference, respectively. In addition, the impact of system oil leakage is also ignored in above equation.
3.2. Non-Linear Modeling of Pump/Valves Independent Metering Control System
A pump-valve independent metering control of volumetric hydraulic power mechanism is shown in Figure 8. The flow rate and pressure in the inlet oil loop are regulated by variable displacement pump, and electro-hydraulic proportional orifice valve in return oil loop is responsible for speed smoothness control and back pressure regulation.
For positive load case, the proportional orifice valve is settled with damp operation mode. Based on the system dynamics equation, flow rate continuum equation, and motion-force hierarchical control theory, the reasonable control law design for variable displacement pump and proportional orifice valve may make the rotational speed of the motor be smoothly controlled under sustained negative load. However, the gravitational potential energy is consumed by the loss of throttling.
The torque balance equation of hydraulic motor can be written as:
where is total moment of inertia for the motor and load, is viscous damping coefficient, and is actual speed of motor. , are external load torque and displacement of the motor, respectively. , are the pressure in cylinder chambers, and is the load pressure of the motor.
The flow rate continuous equation for pump-control-motor system is as:
where is the volume of a chamber, is the effective volume elastic modulus, and is the leakage coefficient.
The displacement of variable displacement pump is regulated by the electro-hydraulic proportional driver. The controller converts the input voltage signal into the corresponding current signal, which drives the proportional actuator of variable displacement pump to control the displacement. The displacement of variable displacement pump could be shown by:
where is the gain of electro-hydraulic proportional valve, with which regulate the displacement of variable pump, is the gain of electro-hydraulic proportional driver of walking pump.
The response of proportional relief valve can be simplified to first order system, and the output pressure of proportional relief valve is proportional to input drive current . Indeed, the proportional amplifier converts the input control voltage into the drive current . The first order system for proportional relief valve can be written as:
where and are the amplifier gain factor of relief valve and proportional amplifier, respectively.
4. Electro-Hydraulic Speed Smoothness Control and Energy Recovery for Heavy Vehicles
Under the flat road and climbing conditions, the displacement pump of the walking system for heavy-duty vehicles is driven by the engine. The speed regulation of hydraulic motor is mainly controlled by displacement regulation for variable displacement pump. However, if there are no necessary retarding measures under long down-slope, the speed of vehicle will continue to increase under the influence of gravity. Traditional braking methods use the travelling brake and parking brake on each motor to maintain the speed of vehicle.
However, when the transport vehicle is downhill for a long distance, using a long-lasting brake to control the speed will cause overheating on the brake pads, which results in brake failure and safety accidents. Therefore, in order to ensure the function of speed regulation when going downhill and at a constant speed, an auxiliary continuous braking scheme is needed. Current major solutions of retarded braking for heavy vehicle include hydraulic auxiliary brake, eddy-current auxiliary brake, engine auxiliary brake, etc.
In view of electro-hydraulic retarding control strategy and energy recovery and reutilization for heavy vehicles, Amir et al. [69] proposed a nonlinear control method based on adaptive sliding mode control, which solves the problem of engine torque control in regenerative mode. Experimental results show that the controller has better performance, such as robustness, convergence of tracking error, and anti-interference characteristics.
Aiming at the problem of high idle speed and high fuel consumption with the engine in the long-distance downhill condition, Jin et al. [70] designed an anti-drag feedback electric drive system and raised a three-layer speed smooth control strategy. The upper control algorithm determines the driving state of vehicle in accordance to the influence factors, such as drag state confirmation value, vehicle speed and engine speed. The middle controller is in charge of starting and running control, and simultaneously realizes the tracking of rotor frequency and voltage to reduce the impact of starting current. The lower controller deals with the driver’s brake pedal and operational intent, where normal exit and emergency braking intention are judged according to the brake pedal opening and its change rate. Moreover, the output anti drag speed is calculated by brake pedal opening and bus voltage. The control scheme of proposed three-layer speed smooth control is shown in Figure 9.
Aiming at the problem of speed regulation and energy recovery in hydraulic drive system for construction machinery, for instance hydraulic excavator under intermittent negative load, Wang et al. [71,72] proposed a control scheme of energy regeneration based on a hydraulic motor-generator, which achieves satisfactory control effect in the experiment. In the reference [73], an engine brake mechanism design for diesel engine application with decompression effect is presented, with which the emissions are drastically reduced, even eliminated. Considering the problem of insufficient braking torque with eddy current brakes (ECB) at low speeds, Karakoc et al. [74] studied new methods of improving the generation capacity of braking torque with ECB. Aiming at the shortcomings of heavy duty vehicle in retardation braking, Zhang et al. [75] proposed a design scheme of hydraulic auxiliary retarder, which mainly consists of hydraulic pump/motor element, accumulator and relief valve, etc.
Hong et al. [76] proposed a speed smooth control system of vehicle, which composes of the braking monitor, wheel slip controller, and target slip assignment algorithm. The extended Kalman filter is used to estimate tire braking force at each wheel, the brake disk-pad friction coefficient, and the lateral tire forces. Sliding mode control method is used to design the wheel slip controller, and the control input is calculated by the estimated braking forces and brake disk-pad friction coefficient. The performance and effectiveness of proposed vehicle speed smooth control system are proved in hardware in-the-loop simulator (HILS) experiments.
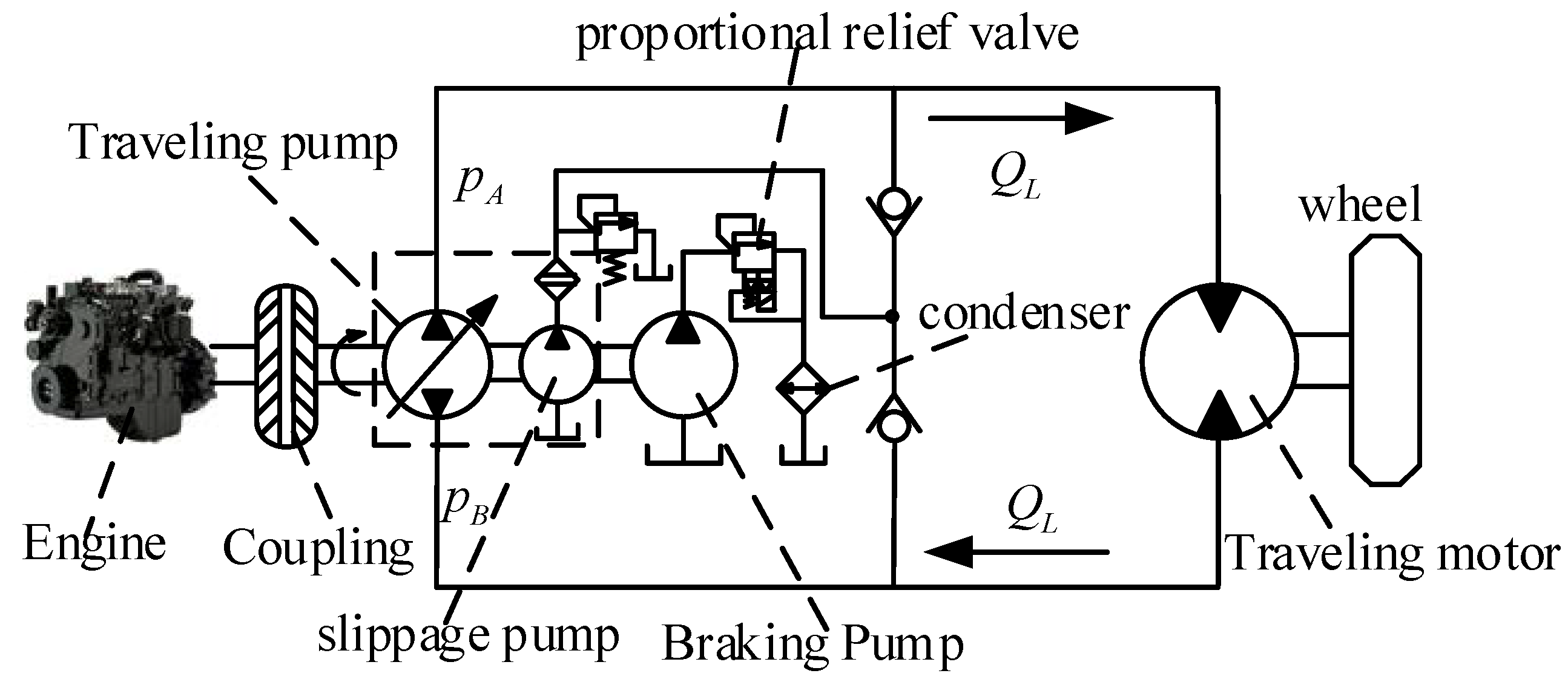
For the hydrostatic driving system of closed-type pump-control motor applied in the tunnel segment truck, Li and He [77] designed a hydraulic retarder continuous braking device embedded into the hydraulic drive system. The devices are constituted of constant pressure pump, proportional relief valve, and other electro-hydraulic components. And it makes up for the problem of brake overheating caused by braking for a long time, which easily leads to brake failure and safety accident. The architecture schematic of close pump-controlled motor hydraulic system is shown in Figure 10.
Shen et al. [78] analyzed the influence of displacement with a hydraulic pump on braking performance for hydraulic driving vehicles under long down-slope, and proposed the principle that hydraulic system and anti-drag braking ability of engine should be exerted reasonably. For the research on eddy current retarder of heavy-duty vehicle, Ni et al. [79] optimized the design of eddy current retarder based on the robust optimization theory. Wang [80] proposed a new system structure scheme, which combines the hydraulic motor-generator energy recovery unit and series throttling valve. Furthermore, a stepwise optimization design method with structural parameters of stator and rotor is proposed.
Energy recovery of heavy engineering vehicles under sustained negative load can not only improve energy efficiency, but also extend the life of vehicle components. Moreover, it is of great significance for the requirements for energy saving and emission reduction. In order to regenerate vehicle vibration into electric power and adjust the required damping according to the road condition, Xie et al. [81] proposed an active control approach to recover energy from damped and regenerative dampers. In addition, an electromagnetic energy harvesting damper with 12 independently controlled slot winding sensors (SWT) is designed. Ho et al. [82] presented a hydraulic energy regeneration system based on closed-loop hydraulic transmission device, and a hydraulic accumulator is used as an energy storage system to recover kinetic energy without any reversal of fluid flow. Moreover, a hierarchical control system is established, and adaptive fuzzy sliding mode control is designed for speed control of secondary device.
At present, the technology has been applied to the hydraulic system of excavators. Energy recovery usually uses two types: no energy storage devices and energy storage devices. The former mainly reuses the cycle energy through energy regeneration systems, but the energy utilization is limited, which restricts its application [83]. The latter mainly includes mechanical, hydraulic recovery, electrical recovery, and hybrid.
Through mechanical recycling technology, the recovery energy is converted to kinetic energy of flywheel. And the energy is released when needed, which plays the role of auxiliary oil supply. Although the technology has been applied in hydraulic system, the controllable performance is not ideal. Hydraulic recovery technology mainly uses the accumulator to realize the recovery of system pressure and potential energy. The technology is relatively mature, and is more suitable for occasions with changeable working conditions. Caterpillar et al. [84] used accumulator to recover the large chamber pressure of hydraulic brake and redundant power of pump, and the effect energy saving is improved well. Domestic universities are also actively studying hydraulic energy recovery technology, such as Zhejiang University, Central South University, Jilin University, etc. The energy recovery of boom and swing system in hydraulic excavator had also seen great progress [85].
With electric recycling technology, the recovered energy is converted into electrical energy storage or direct output. This form has good energy saving effect and good controllability, but the cost of hydraulic system is high [86]. Hybrid technology used two or more power sources to provide power. The technology is widely used in hybrid-electric mixed applications, which is composed of engine and electric generator in construction machinery. Hybrid power technology can effectively exert the advantages of each power source to improve overall system efficiency.
Through a lot of literature analysis and actual investigation, we can know that the application of hydraulic auxiliary braking and eddy current braking is limited in the actual construction, which is restricted by the installation structure and safety requirements of heavy transport vehicles. In addition, since braking force provided by the engine is limited, it cannot be accurately controlled.
Aiming at the study on speed smooth control for heavy vehicle under long down-slope, it is mainly focuses on the following aspects: design of hydraulic retarder devices and system, multi-layer speed smooth control strategy and motion-force control algorithm, coordination control for energy saving, and integrated energy management scheme for energy recovery and utilization is also a research hotspot. However, research progresses on design of retarder system and speed smoothness control strategy with motion-force hierarchical control architecture for heavy vehicles are comparatively scarce, especially in practical engineering applications. But that is indeed a technical problem urgently needed to be solved in practical engineering.
Motion-force hierarchical and coordinated control scheme, which is based on the inlet/outlet independent metering control, is applies to the study of speed smoothness control for a heavy vehicle, and it is improved an effective solution to promote the research. Moreover, introducing active disturbance rejection control (ADRC) in the study on speed smoothness control strategy for heavy vehicles is of great practical value for engineering applications. The influence of uncertainty disturbances, such as the uncertainty of road condition, the descent force and system parameters of heavy vehicle is unified as the total disturbance of the system. Then the disturbance is estimated and compensated online by the extended state observer. Since the ADRC does not require accurate mathematical models, and has strong robustness and engineering practicality, it has become an effective solution for the design on speed smoothness control for heavy vehicles in practical applications.
The speed smoothness control for heavy vehicles means that the travelling speed can be controlled and maintain the speed smooth under sustained negative load, which needs to solve the coupling influence between speed regulation and load variation suppression. However, some disadvantages existed in current electrohydraulic retarding technology solutions and are listed below:
- Through continuous braking of the brake, sustained negative loads may be fully suppressed, but that will cause the serious braking heat as well as decline of braking performance, especially under long down-slope. Although intermittent repeated braking can improve this problem to a certain degree, the speed smoothness is not good.
- The solution, employing pump-controlled speed regulation and electro-hydraulic proportional balancing valve for back pressure regulation, can decouple speed control and negative load suppression, and brake slow speed is not required for long downhill slope. Moreover, the balancing valve is equipped on return line, which facilitates cooler arrangement for forced cooling, and response speed due to valve-controlled back pressure regulation. However, the disadvantage of this scheme is that it cannot recover downhill potential energy.
- Given that the solution of speed regulation with pump-control and speed smoothness control with retarder pump retardation solution, downhill potential energy is absorbed by the engine load and other hydraulic circuits, and the remaining energy is further utilized by the retarder system. Although this scheme recovers part of the downhill potential energy, system structure is complex and limited by installation space, especially while the additional weight and installation space of the recovery device is strictly required in practical engineering application. In addition, response speed is slower compared with the above scheme.
- Dual-valve independent metering scheme can achieve coupling influence between speed regulation and negative load suppression, and it has a simple structure and fast response. This solution, combined with the accumulator, can supply the cooling circuit with oil, and partially recover of downhill energy. But the disadvantages are that the throttling loss is serious, and the energy efficiency is lower compared with pump-control regulation.
The electro-hydraulic retarder control strategy for heavy vehicles, which is studied in this paper, is based on the inlet/outlet independent metering control of electro-hydraulic power mechanism. Due to the increase of system control variables, the flexibility of system control system is greatly improved and the energy efficiency is also raised. However, so far, the research achievements in this respect are limited, and the research group conducted little research in this aspect.
5. Conclusions
Inlet/outlet oil independent and coordinated control for electro-hydraulic power mechanism improve the control flexibility compared to ordinary electro-hydraulic control valve, and effectively solve the serious coupling influence between speed regulation and load variation suppression, especially sustained negative load. Combined with digital intelligent control and advanced displacement control technology, the inlet/outlet oil independent and coordinated control scheme reduces metering losses of valve-controlled and pump-controlled electro-hydraulic system, for example, reduction of throttling loss, energy regeneration and recuperation, as well as maintaining the excellent dynamic performance. However, it not only increases the control system complexity and reduces the reliability, but also increases the production and maintenance costs, which greatly restricts the application in a practical engineering project. Moreover, the inlet/outlet oil independent and coordinated control faces challenges, such as smooth switching between different control modes, combination with advanced pump control technology, and better maintainability and redundancy strategies [87].
With the development of computer control technology and advanced power electronics equipment, for instance, various high precision sensor, the new electro-hydraulic control components with digital control have appeared, and it usually include the digital programmable valve and flow rate amplifier valve with digital pilot, etc. Moreover, the new control components apply to independent metering control system, which promotes the modern intelligent control for electro-hydraulic system. However, most of the digital valves currently studied are only as high-speed on-off valves. Because of the limitation with their structure, it can only be applied to pilot control and small flow rate control applications.
For the electro-hydraulic power mechanism under sustained negative load, the inlet/outlet oil dependent metering control system with motion-force hierarchical control architecture mainly includes the following research aspects: flow rate and pressure independent regulation, the decoupling mechanism and method between speed control and speed smoothness control, the motion-force hierarchical and coordinated control, the robust control for variable parameter and soft parameter, dynamic feature recognition method for long time and continuous running system, and integrated energy management scheme for energy recovery and utilization.
Meanwhile, with the influence of various kinds of uncertainties and unknown disturbances in electro-hydraulic motion control system, the active disturbance rejection control (ADRC) technique assigns all uncertainties to the total disturbance of the system and gives estimation and compensation. In addition, because of the good robustness and easy implementation, it will be very useful in industrial applications. Consequently, ADRC and compound control strategy based on ADRC will become a hot research focus for an electro-hydraulic motion control system.
At present, the inlet/outlet oil independent metering regulation and the motion-force coordinate control have become a hot topic in the field of electro-hydraulic control. And it has been successfully applied in the electro-hydraulic swing and execution system of hydraulic excavators and the speed smooth control system of heavy transport vehicles. However, the systematic achievement and research has not appeared in the independent adjusting mechanism of hydraulic power mechanism under the sustained negative load. Especially, in the speed smooth control strategy and energy saving control for moving body machine power mechanism under sustained negative load. Energy recovery schemes in many cases are limited in case of considering the addition mass of energy recovery component (e.g., for the electro-hydraulic walking system on the long downhill, the volume and additional weight of the accumulator for storing gravity potential energy are too large to be applied in practice) and the safety-request (e.g., the grid feedback is not allowed due to the spark of the pantograph) in a construction site. In addition, it is also necessary to be considered the cooling problem caused by the braking.
In summary, for electro-hydraulic motion control system under sustained negative load, the research fields, including comprehensive analysis, the independent and coordinate control strategy based on motion-force hierarchical control architecture, and compound control strategy based on ADRC are the future trends. Especially, the research is of the important theoretical significance and engineering application value for promoting the overall control performance in electro-hydraulic motion control system. At present, there are still some systematic and thorough problems in coordinated control and energy recovery method with low cost. With the developments of cybernetic physical system, field bus, intelligent control, and big data and applications in hydraulic control system, more and more coordinated control and energy recovery method will be proposed and applied in hydraulic system under continuous negative load.
Author Contributions
Design of the research scheme and research supervision: Y.L.; performing of the research and writing of the manuscript: W.L. and D.L.
Acknowledgments
The authors would like to acknowledge the support of National Natural Science Foundation of China (Grant No. 51475019) and National Key Basic Research Program of China (Grant No. 2014CB046403).
Conflicts of Interest
The authors declare no conflict of interest with other researchers.
References
- Li, Y.H.; Wang, Y.; Geoffrey Chase, J.; Mattila, J.; Myung, H.; Sawodny, O. Survey and Introduction to Focused Section on Mechatronics for Sustainable and Resilient Civil Infrastructure. IEEE/ASME Trans. Mechatron. 2013, 18, 1637–1645. [Google Scholar] [CrossRef]
- Sheng, Z.; Li, Y.H. Hybrid Robust Control Law with Disturbance Observer for High-Frequency Response Electro-Hydraulic Servo Loading System. Appl. Sci. 2016, 6, 98. [Google Scholar] [CrossRef]
- Chen, M.M. The Research on Stability of Counterbalance Valve in Over-Running Load Condition; Jilin University: Changchun, China, 2015. [Google Scholar]
- Liu, X.M.; Lang, X.J. Research on Speed Stability of Separate Direction Valve Control System under Over-running Load. Chin. J. Mech. Res. Appl. 2015, 2, 176–179. [Google Scholar]
- Liu, B.C. A Study of Winch System for Wheel Crane in the Over-Running Load Condition; Jilin University: Changchun, China, 2011. [Google Scholar]
- Xian, Y.P. Research on Closed Hydraulic System of Crawler Crane in Over-Running Load Condition; Dalian University of Technology: Dalian, China, 2012. [Google Scholar]
- Nie, D.W. Research on Control Method of Load for Truck Crane Hoisting Mechanism in Over-Running Load Condition; Hunan University: Changsha, China, 2013. [Google Scholar]
- Backe, W. Design systematics and performance of cartridge valve controls. In Proceedings of the International Conference on Fluid Power, Tampere, Finland, 1–4 June 1987; pp. 1–48. [Google Scholar]
- Jansson, A.; Palmberg, J.O. Separate Controls of Meter-In and Meter-Out Orifices in Mobile Hydraulic Systems; SAE Technical Paper; SAE International: Warrendale, PA, USA, 1990. [Google Scholar]
- Shenouda, A.; Book, W. Energy Saving Analysis Using a Four-Valve Independent Metering Configuration Controlling a Hydraulic Cylinder; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2005. [Google Scholar]
- Shenouda, A.; Wayne, B. Optimal Mode Switching for a Hydraulic Actuator Controlled with Four-Valve Independent Metering Configuration. Int. J. Fluid Power 2008, 9, 35–43. [Google Scholar] [CrossRef]
- Elfving, M.; Palmberg, J.O.; Jansson, A. Distributed control of fluid power actuators-a load sensing application of a cylinder with decoupled chamber pressure control. In Proceedings of the Fifth Scandinavian International Conference on Fluid Power (SICFP’97), Linkoping, Sweden, 28–30 May 1997. [Google Scholar]
- Opdenbosch, P.; Sadegh, N.; Enes, A.R.; Book, W.J. Auto-calibration based control for independent metering of hydraulic actuators. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2011), Shanghai, China, 9–13 May 2011; Volume 43, pp. 153–158. [Google Scholar]
- Ding, R.Q.; Xu, B.; Zhang, J.; Li, G. Mechanical-hydraulic Coupling Model of Independent Metering Control Excavator and Its Test Verification. Chin. J. Trans. Chin. Soc. Agric. Mach. 2016, 47, 309–409. [Google Scholar]
- Hu, H.; Zhang, Q. Realization of Programmable Control using a Set of Individually Controlled Electrohydraulic Valves. Int. J. Fluid Power 2002, 3, 9–34. [Google Scholar] [CrossRef]
- Zhang, Q.; Hu, H. Multi-Function Realization Using an Integrated Programmable E/H Control Valve. Appl. Eng. Agric. 2003, 19, 283–290. [Google Scholar]
- Pedersen, H.C.; Andersen, T.O.; Hansen, R.H.; Stubkier, S. Investigation of Separate Meter-In Separate Meter-Out Control Strategies for Systems with Over Centre Valves. In Proceedings of the Bath/ASME Symposium on Fluid Power & Motion Control (FPMC 2010), Bath, UK, 12–14 September 2010. [Google Scholar]
- Andersen, T.O.; Mnzer, M.E.; Hanse, M.R. Evaluation of control strategies for separate meter-in separate meter-out hydraulic boom actuation in mobile applications. In Proceedings of the 17th International Conference on Hydraulic and Pneumatics, Ostrava, Czech Republic, 5–7 June 2001; pp. 450–475. [Google Scholar]
- Wang, Q.F.; Gu, L.Y.; Lu, Y.X. Research on Principle and Performance of Meter-in, Meter-out Independent Regulate based on Pressure Decrease Sensing. Chin. J. Mech. Eng. 2001, 37, 21–24. [Google Scholar] [CrossRef]
- Wang, Q.F. Research on Inlet/Outlet Independent Regulation of Electro-hydraulic Throttling System with Large Inertia Load. Chin. J. Mech. Eng. 1999, 10, 853–855. [Google Scholar]
- Liu, Y.J.; Xu, B.; Yang, H.; Zeng, D. Strategy for Flow and Pressure Control of Electro-hydraulic Proportional Separate Meter-In and Meter-Out Control System. Appl. Eng. Agric. 2010, 41, 182–187. [Google Scholar]
- Xu, B.; Zeng, D.R.; Ge, Y.Z.; Liu, Y.J. Research on Characteristic of Mode Switch of Separate Meter in and Meter out Load Sensing Control System. J. Zhejiang Univ. 2011, 45, 858–863. [Google Scholar]
- Quan, L.; Lian, Z.S. Improving the efficiency of pump Controlled Differential Cylinder System with Inlet and Outlet Separately Controlled Principle. Chin. J. Mech. Eng. 2005, 41, 123–127. [Google Scholar] [CrossRef]
- Yuan, M.L. Research on Load Port Independently Controlled Double Servo Valves Cylinder System; Beijing Institute of Technology: Beijing, China, 2015. [Google Scholar]
- Cheng, M.; Xu, B.; Zhang, J.; Ding, R. Valve-based compensation for controllability improvement of the energy-saving electrohydraulic flow matching system. Zhejiang Univ. Sci. A 2017, 18, 430–442. [Google Scholar] [CrossRef]
- Dong, W.; Jiao, Z.; Wu, S. Compound control strategy for independent metering directional valve of engineering machinery by simulation. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014. [Google Scholar]
- Wang, S. Independent Metering Control Programmable Valve and Its Application in Intelligent Hydraulic Excavator; Zhejiang University of Technology: Hangzhou, China, 2017. [Google Scholar]
- Li, Z.Z.; Huang, H.J.; Quan, L.; Wang, S.G. The Independent Metering System Based on Digital Flow Valve. Chin. Hydraul. Pneum. 2016, 2, 17–23. [Google Scholar]
- Liu, Y. Research on Key Techniques of Independent Metering Directional Valve Control System; Zhejiang University: Hangzhou, China, 2011. [Google Scholar]
- Liu, J.; Xie, H.; Hu, L.; Fu, X. Realization of direct flow control with load pressure compensation on a load control valve applied in overrunning load hydraulic systems. Flow Meas. Instrum. 2017, 53, 261–268. [Google Scholar] [CrossRef]
- Zheng, Q.; Li, Y.H.; Yang, L.M. Compound control strategy for the pump controlled parallel variable displacement motor speed system. J. Beijing Univ. Aeronaut. Astron. 2012, 38, 692–696. [Google Scholar]
- Niksefat, N.; Sepehri, N. Robust Force Controller Design for an Electro-Hydraulic Actuator Based on Nonlinear Model. In Proceedings of the 1999 IEEE International Conference on Robotics & Automation, Detroit, MI, USA, 10–15 May 1999; pp. 200–206. [Google Scholar]
- Liu, R.; Alleyne, A. Nonlinear Force/Pressure Tracking of an Electro-Hydraulic Actuator. J. Dyn. Syst. Meas. Control 2000, 122, 232–237. [Google Scholar] [CrossRef]
- Kaddissi, C.; Kenne, J.P.; Saad, M. Identification and Real-Time Control of an Electrohydraulic Servo System Based on Nonlinear Backstepping. IEEE/ASME Trans. Mechatron. 2007, 12, 12–22. [Google Scholar] [CrossRef]
- Eriksson, B. Mobile Fluid Power Systems Design: With a Focus on Energy Efficiency. Ph.D. Thesis, Linköping University, Linköping, Sweden, 2010. [Google Scholar]
- Eriksson, B.; Palmberg, J.O. Individual Metering Fluid Power Systems: Challenges and Opportunities. Proceedings of the Institution of Mechanical Engineers. Part I J. Syst. Control Eng. 2011, 225, 196–211. [Google Scholar]
- Nam, Y. QFT force loop design for the aerodynamic load simulator. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 1384–1392. [Google Scholar]
- Nam, Y.; Hong, S.K. Force control system design for aerodynamic load simulator. Control Eng. Pract. 2002, 10, 549–558. [Google Scholar] [CrossRef]
- Truong, D.Q.; Ahn, K.K. Force control for hydraulic load simulator using self-tuning grey predictor-fuzzy PID. Mechatronics 2009, 19, 233–246. [Google Scholar] [CrossRef]
- Truong, D.Q.; Ahn, K.K.; Soo, K.J.; Soo, Y.H. Application of fuzzy-PID controller in hydraulic load simulator. In Proceedings of the IEEE International Conference on ICMA 2007, Harbin, China, 5–8 August 2007; pp. 3338–3343. [Google Scholar]
- Eryilmaz, B.; Wilson, B.H. Improved tracking control of hydraulic systems. J. Dyn. Syst. Meas. Control 2001, 23, 457–462. [Google Scholar] [CrossRef]
- Sohl, G.A.; Bobrow, J.E. Experiments and simulations on the nonlinear control of a hydraulic servo system. IEEE Trans. Control Syst. Technol. 1999, 7, 238–247. [Google Scholar] [CrossRef]
- Hu, C.; Yao, B.; Wang, Q. Adaptive Robust Precision Motion Control of Systems with Unknown Input Dead-Zones: A Case Study with Comparative Experiments. IEEE Trans. Ind. Electron. 2011, 58, 2454–2464. [Google Scholar] [CrossRef]
- Nozaki, T.; Mizoguchi, T.; Ohnishi, K. Decoupling Strategy for Position and Force Control Based on Modal Space Disturbance Observer. IEEE Trans. Ind. Electron. 2014, 61, 1022–1032. [Google Scholar] [CrossRef]
- Pillosu, S.; Pisano, A.; Usai, E. Unknown-input observation techniques for infiltration and water flow estimation in open-channel hydraulic systems. Control Eng. Pract. 2012, 20, 1374–1384. [Google Scholar] [CrossRef]
- Kaddissi, C.; Kenne, J.P.; Saad, M. Indirect Adaptive Control of an Electro-hydraulic Servo System Based on Nonlinear Backstepping. IEEE/ASME Trans. Mechatron. 2011, 16, 1171–1177. [Google Scholar] [CrossRef]
- Yang, Y.; Balakrishnan, S.N.; Tang, L.; Landers, R.G. Electro-hydraulic Control Using Neural MRAC Based on a Modified State Observer. IEEE/ASME Trans. Mechatron. 2013, 18, 867–877. [Google Scholar] [CrossRef]
- Zhang, J.H.; Zheng, W.X. Design of Adaptive Sliding Mode Controllers for Linear Systems via Output Feedback. IEEE Trans. Ind. Electron. 2014, 61, 3553–3562. [Google Scholar] [CrossRef]
- Chiang, M.H.; Lee, L.W.; Liu, H.H. Adaptive fuzzy controller with self-tuning fuzzy sliding-mode compensation for position control of an electro-hydraulic displacement-controlled system. J. Intell. Fuzzy Syst. 2014, 26, 815–830. [Google Scholar]
- Yao, J.Y.; Jiao, Z.X.; Yao, B.; Shang, Y.; Dong, W. Nonlinear Adaptive Robust Force Control of Hydraulic Load Simulator. Chin. J. Aeronaut. 2012, 25, 766–775. [Google Scholar] [CrossRef]
- Ho, T.H.; Ahn, K.K. Speed Control of a Hydraulic Pressure Coupling Drive Using an Adaptive Fuzzy Sliding-Mode Control. IEEE/ASME Trans. Mechatron. 2012, 17, 976–986. [Google Scholar] [CrossRef]
- Liu, Y.J.; Xu, B. Calculation Force Control Based on Linearization Feedback Model of Separate Meter in and Separate Meter Out Control System. In Proceedings of the IEEE International Conference on Automation and Logistics, Shenyang, China, 18–21 August 2009; pp. 1464–1468. [Google Scholar]
- Jin, M.; Wang, Q. An Energy-Saving Way to Balance Variable Negative Load Based on Back-Stepping Control with Load Observer. In Proceedings of the BATH/ASME 2016 Symposium on Fluid Power and Motion Control, Bath, UK, 7–9 September 2016. [Google Scholar]
- Yao, J.; Deng, W. Active disturbance rejection adaptive control of uncertain nonlinear systems: Theory and application. Nonlinear Dyn. 2017, 89, 1–14. [Google Scholar] [CrossRef]
- Castañeda, L.A.; Luviano-Juárez, A.; Chairez, I. Robust Trajectory Tracking of a Delta Robot Through Adaptive Active Disturbance Rejection Control. IEEE Trans. Control Syst. Technol. 2015, 23, 1387–1398. [Google Scholar] [CrossRef]
- Li, P.; Lam, J.; Chun, K.C. Experimental Investigation of Active Disturbance Rejection Control for Vehicle Suspension Design. Int. J. Theor. Appl. Mech. 2016, 1, 89–96. [Google Scholar]
- Moghadam, H.Z.; Landers, R.G.; Balakrishnan, S.N. Hierarchical optimal force-position control of complex manufacturing processes. IEEE Trans. Control Syst. Technol. 2005, 13, 321–327. [Google Scholar]
- Wang, Z.P.; Wang, Y.C.; Zhang, L.; Liu, M.C. Vehicle Stability Enhancement through Hierarchical Control for a Four-Wheel-Independently-Actuated Electric Vehicle. Energies 2017, 10, 947. [Google Scholar] [CrossRef]
- Wu, X.; Shen, J.; Li, Y.G.; Lee, K.Y. HGLMA. Hierarchical optimization of boiler–turbine unit using fuzzy stable model predictive control. Control Eng. Pract. 2014, 30, 112–123. [Google Scholar] [CrossRef]
- Yao, B.; Hu, C.H.; Wang, Q.F. An Orthogonal Global Task Coordinate Frame for Contouring Control of Biaxial Systems. IEEE/ASME Trans. Mechatron. 2012, 17, 622–634. [Google Scholar]
- Liu, S.; Yao, B. Coordinate Control of Energy Saving Programmable Valves. IEEE Trans. Control Syst. Technol. 2007, 16, 34–45. [Google Scholar] [CrossRef]
- Zhang, R.; Alleyne, A.; Prasetiawan, E. Modeling and H2/H∞ MIMO control of an Earthmoving vehicle powertrain. J. Dyn. Syst. Meas. Control. 2002, 124, 625–636. [Google Scholar] [CrossRef]
- Zhang, C.H.; Shi, Q.; Cheng, J. Synchronization Control Strategy in Multi-motor Systems Based on the Adjacent Coupling Error. Proc. CSEE 2007, 15, 59–63. [Google Scholar]
- Fang, R.W.; Chen, J.S. Cross-coupling control for a direct-drive robot. JSME Int. J. Ser. C 2002, 45, 749–757. [Google Scholar] [CrossRef]
- Sun, H.; Chiu, T.C. Motion synchronization for dual-cylinder electro-hydraulic lift systems. IEEE/ASME Trans. Mechatron. 2002, 7, 171–181. [Google Scholar]
- Zhu, X.; Cao, J.; Tao, G.; Yao, B. Synchronization Strategy Research of Pneumatic Servo System Based on Separate Control of Meter-in and Meter-out. In Proceedings of the 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009; pp. 14–17. [Google Scholar]
- Xu, B.; Ding, R.Q.; Zhang, J.H.; Cheng, M.; Sun, T. Pump/valves coordinate control of the independent metering system for mobile machinery. Autom. Constr. 2015, 57, 98–111. [Google Scholar] [CrossRef]
- Li, Y.H.; Zheng, Q.; Yang, L.M. Design of robust sliding mode control with disturbance observer for multi-axis coordinated traveling system. Comput. Math. Appl. 2012, 64, 759–765. [Google Scholar] [CrossRef]
- Fazeli, A.; Zeinali, M.; Khajepour, A. Application of Adaptive Sliding Mode Control for Regenerative Braking Torque Control. IEEE/ASME Trans. Mechatron. 2012, 17, 745–755. [Google Scholar] [CrossRef]
- Jin, C.; Zheng, S.Y.; Tian, H.Y. Anti-drive System Design and Hierarchy Control Strategy of Electric Drive Vehicle. Trans. Chin. Soc. Agric. Mach. 2014, 45, 22–27. [Google Scholar]
- Chen, Q.; Wang, Q.; Wang, T. A novel hybrid control strategy for potential energy regeneration systems of hybrid hydraulic excavators. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2016, 230, 375–384. [Google Scholar] [CrossRef]
- Wang, T.; Wang, Q.; Lin, T. Improvement of boom control performance for hybrid hydraulic excavator with potential energy recovery. Autom. Constr. 2013, 30, 161–169. [Google Scholar] [CrossRef]
- Barbieri, F.A.A.; Andreatta, E.C.; Argachoy, C.; Brandao, H. Decompression engine brake modeling and design for diesel engine application. SAE Int. J. Engines 2010, 3, 92–102. [Google Scholar] [CrossRef]
- Karakoc, K.; Park, E.J.; Suleman, A. Improved braking torque generation capacity of an eddy current brake with time varying magnetic field: A numerical study. Finite Elements Anal. Des. 2012, 59, 66–75. [Google Scholar] [CrossRef]
- Zhang, H.; Guo, K.; Wang, C.Y. Design and analysis of hydraulic retarder device for heavy vehicle. Sci. Technol. Eng. 2017, 17, 25–29. [Google Scholar]
- Hong, D.; Wang, I.; Yoon, P.; Huh, K. Development of a vehicle stability control system using brake-by-wire actuators. J. Dyn. Syst. Meas. Control 2008, 130, 011008. [Google Scholar] [CrossRef]
- Li, Y.H.; He, L.Y. Counterbalancing Speed Control for Hydrostatic Drive Heavy Vehicle under Long Down-Slope. IEEE/ASME Trans. Mechatron. 2015, 20, 1533–1542. [Google Scholar] [CrossRef]
- Shen, J.J.; Liu, B.X.; Zhang, Z.F. Discussion on Brake Performance of Hydraulic Driving Vehicle at Downhill. J. Zhengzhou Univ. (Eng. Sci.) 2007, 28, 113–116. [Google Scholar]
- Ni, J.S. Research of the Braking Performance and Optimization Design of Heavy Duty Construction Vehicle Eddy Current Retarder. Chin. J. Mech. Transm. 2015, 9, 81–83. [Google Scholar]
- Wang, T. Study on Boom Energy Recovery Element and System of Hybrid Excavator; Zhejiang University: Hangzhou, China, 2013. [Google Scholar]
- Xie, L.H.; Li, J.H.; Cai, S.; Li, X. Electromagnetic Energy-Harvesting Damper with Multiple Independently Controlled Transducers: On-Demand Damping and Optimal Energy Regeneration. IEEE/ASME Trans. Mechatron. 2017, 22, 2705–2713. [Google Scholar] [CrossRef]
- Ho, T.H.; Ahn, K.K. Design and control of a closed-loop hydraulic energy-regenerative system. Autom. Constr. 2012, 22, 444–458. [Google Scholar] [CrossRef]
- Truong, B.N.M.; Truong, D.Q.; Young, L.S. Study on energy regeneration system for hybrid hydraulic excavator. In Proceedings of the 2015 International Conference on Fluid Power and Mechatronics (FPM), Harbin, China, 25–26 December 2015; pp. 1349–1354. [Google Scholar]
- Wang, Y.J. Research on Working Device Joint Simulation and Static & Dynamic Characteristics of Large Hydraulic Excavators; Taiyuan University of Technology: Taiyuan, China, 2014. [Google Scholar]
- Lin, T.L. Research on the Potential Energy Regeneration System based on the Hydraulic Excavators; Zhejiang University: Hangzhou, China, 2011. [Google Scholar]
- Zheng, T.; He, Y.C. Simulation of hydraulic excavators slewing system based on hydraulic accumulator. In Proceedings of the 2015 International Conference on Fluid Power and Mechatronics (FPM), Harbin, China, 25–26 December 2015; pp. 1063–1066. [Google Scholar]
- Xu, B.; Cheng, M. Motion control of multi-actuator hydraudlic systems for mobile machineries: Recent advancements and future trends. Front. Mech. Eng. 2018, 13, 151–166. [Google Scholar] [CrossRef]
Figure 1.
Independent metering control system based on poppet valve.
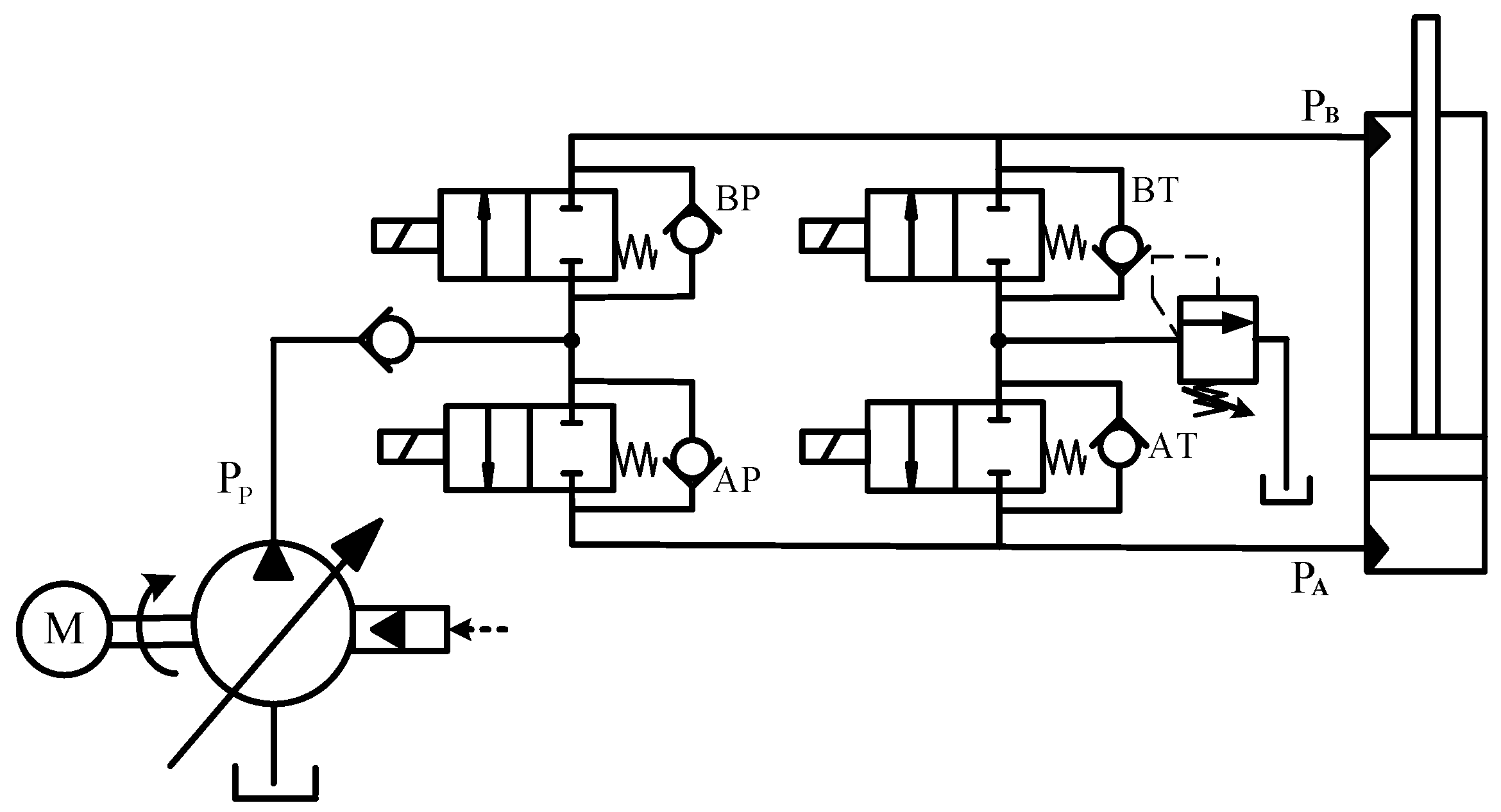
Figure 2.
Electro-hydraulic system mechanism of four-valve independent regulation.
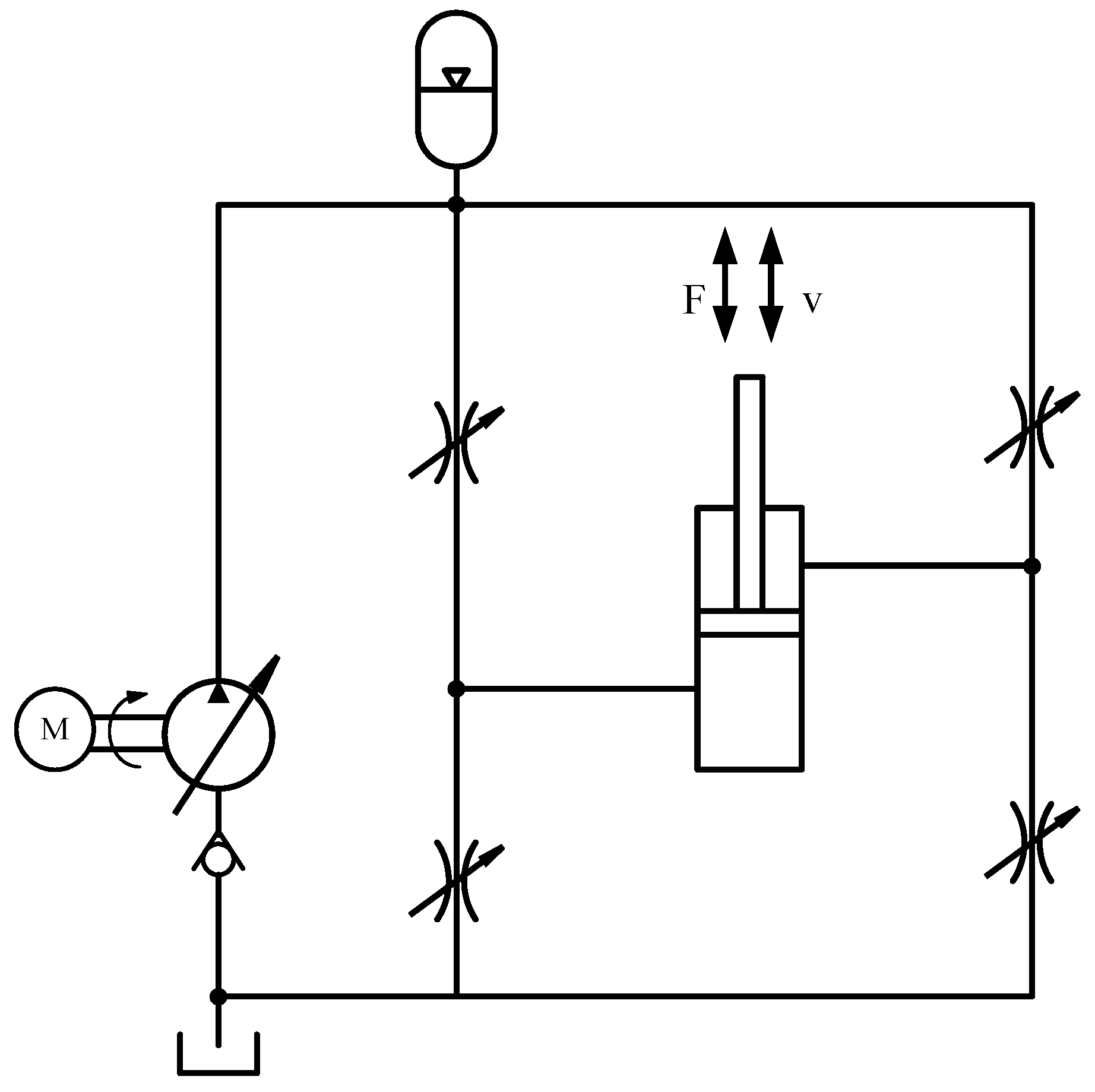
Figure 3.
Electro-hydraulic flow rate matching system mechanism of pump/valves control.
Figure 4.
Optimal control scheme with hierarchical structure for electric vehicle.
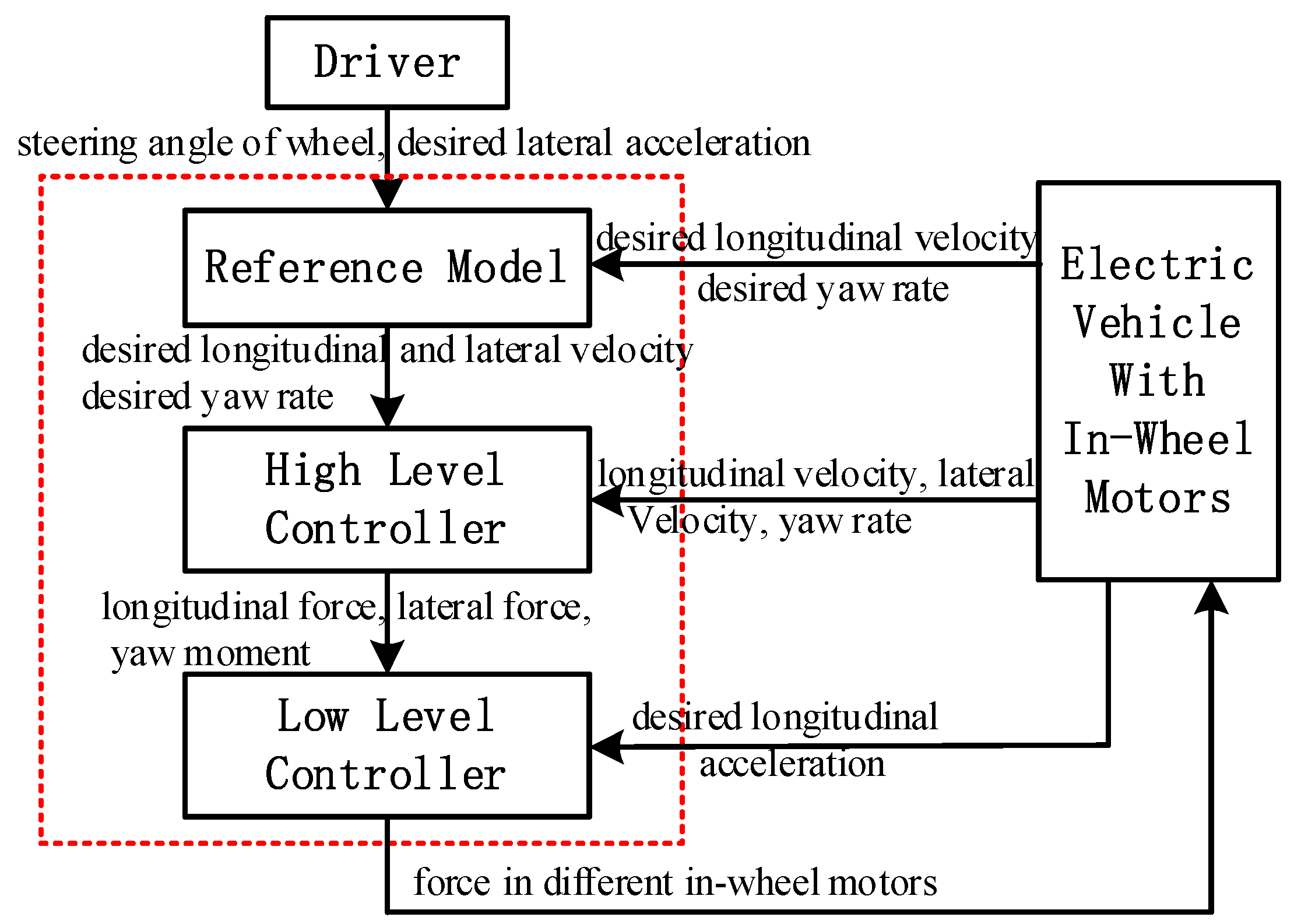
Figure 5.
Control scheme of independent metering valves-pump system for energy saving.
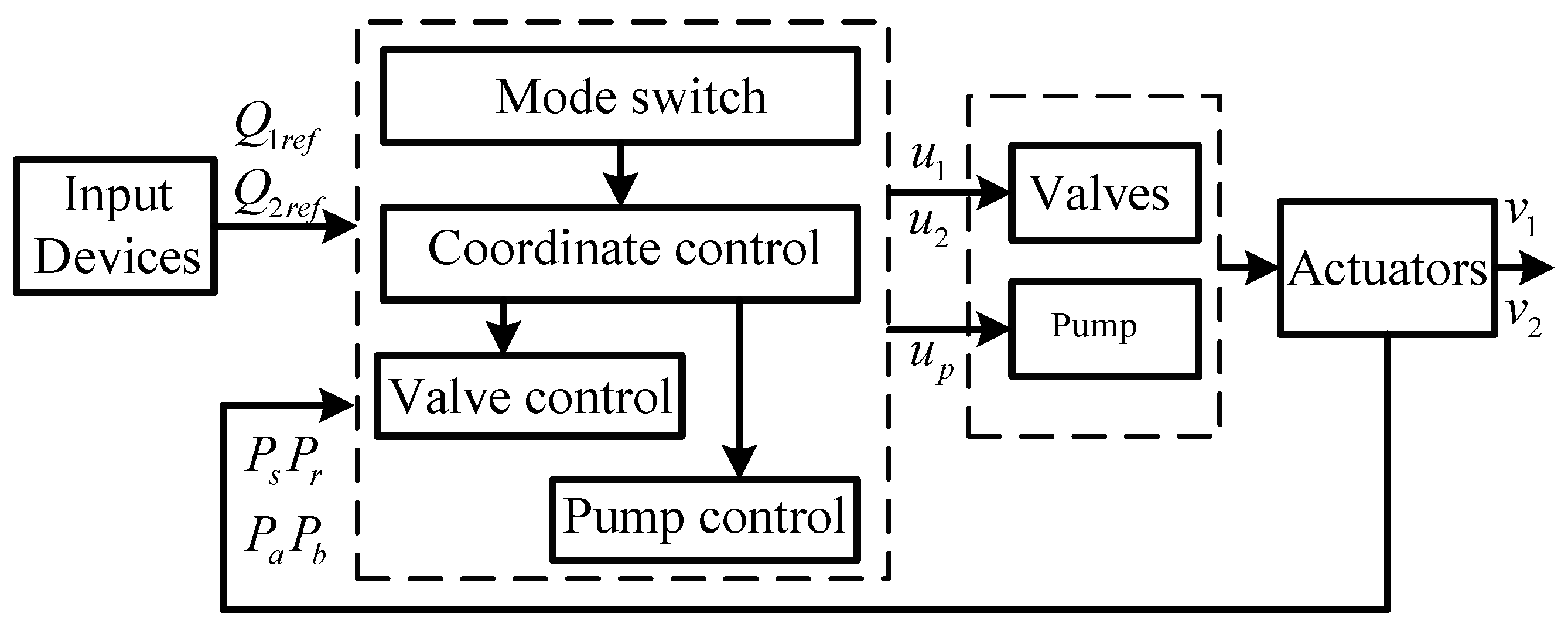
Figure 6.
Structure of multi-axis coordinated motion system based on adjacent cross-coupling strategy.
Figure 6.
Structure of multi-axis coordinated motion system based on adjacent cross-coupling strategy.
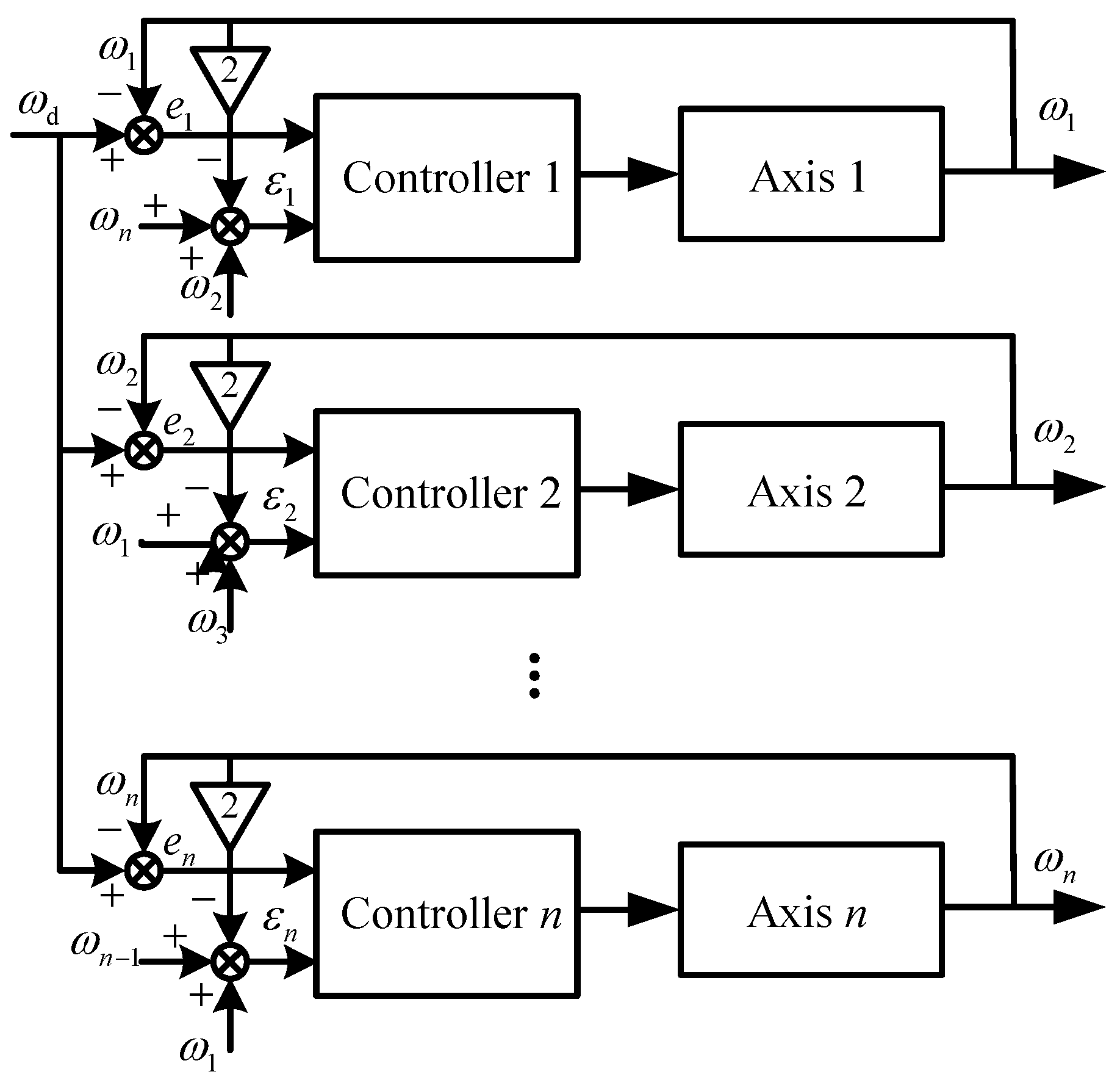
Figure 7.
A dual-valve independent metering control system of electro-hydraulic power mechanism.
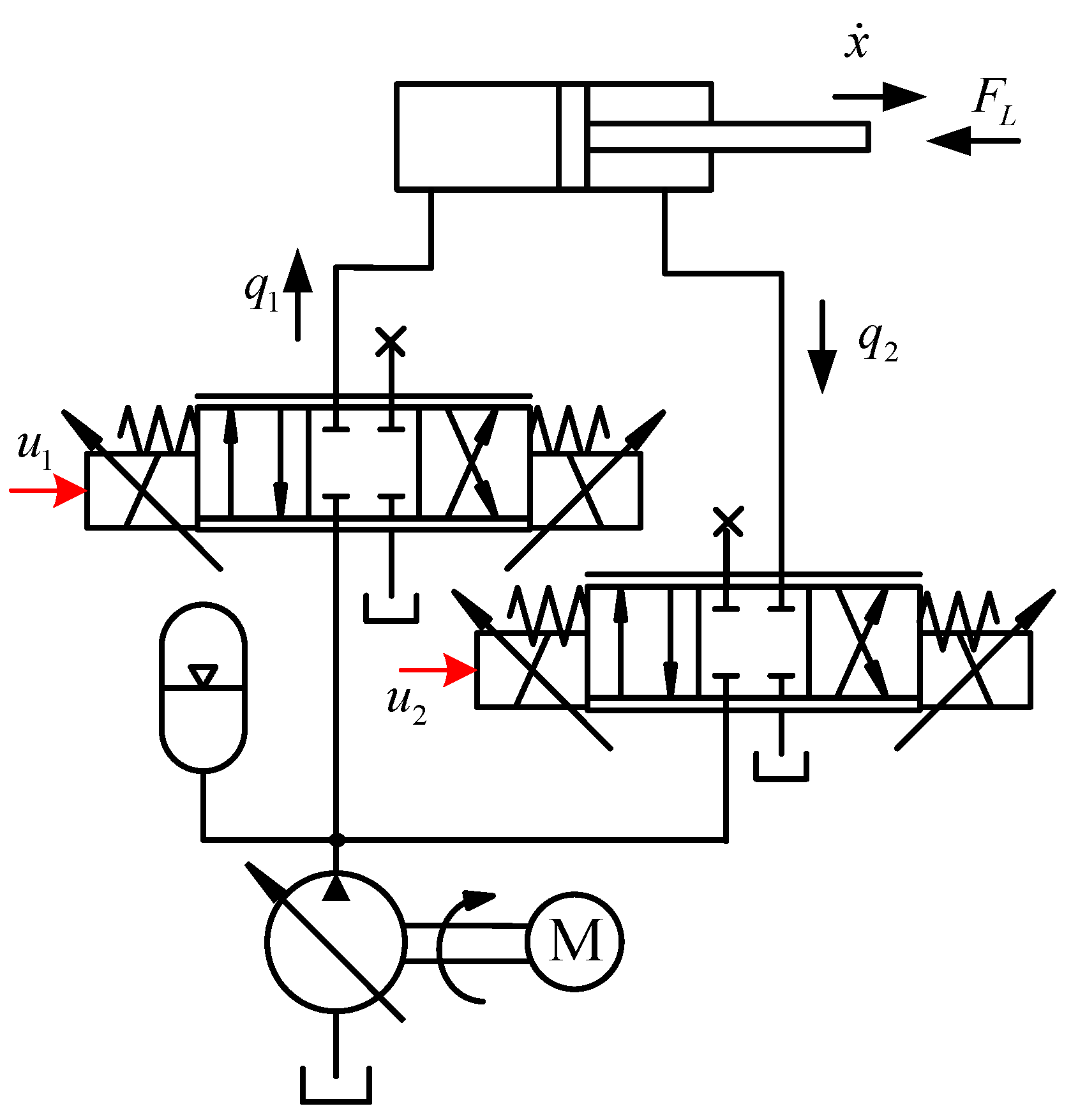
Figure 8.
A pump-valve independent metering control of volumetric hydraulic power mechanism.
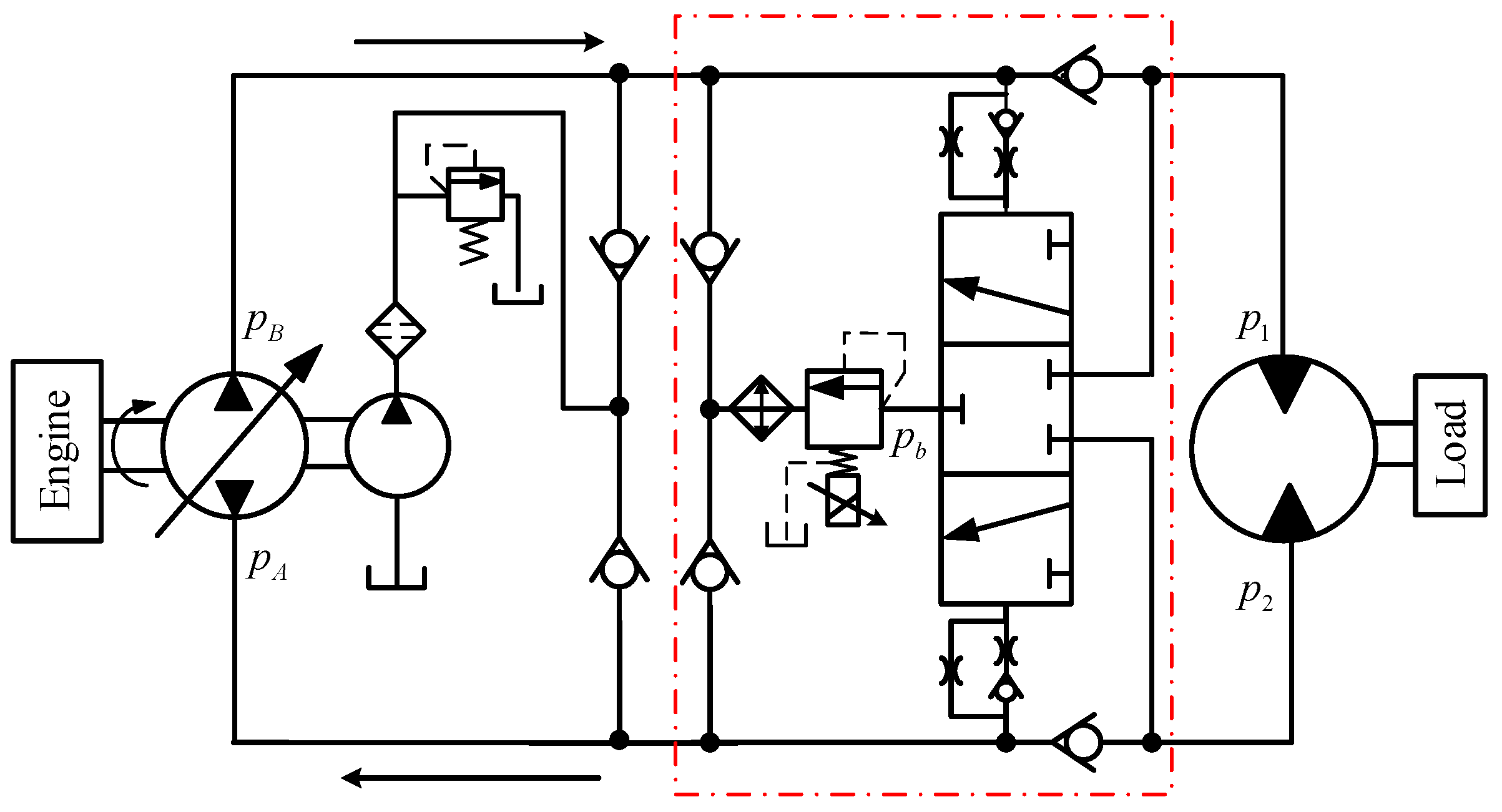
Figure 9.
Control scheme of three-layer speed smooth control.

Figure 10.
Architecture schematic of close pump-controlled motor hydraulic system.
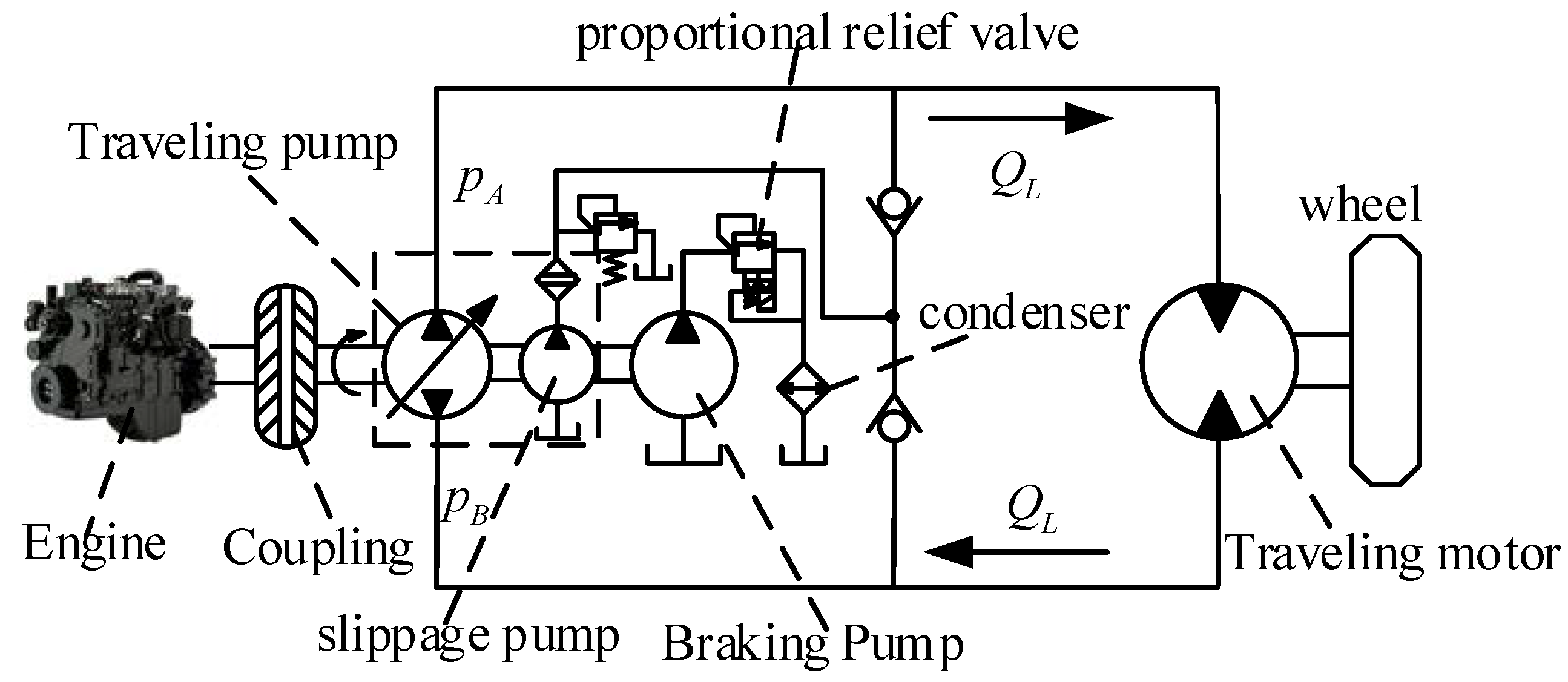
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Liu, W.; Li, Y.; Li, D. Review on Inlet/Outlet Oil Coordinated Control for Electro-Hydraulic Power Mechanism under Sustained Negative Load. Appl. Sci. 2018, 8, 886. https://doi.org/10.3390/app8060886
AMA Style
Liu W, Li Y, Li D. Review on Inlet/Outlet Oil Coordinated Control for Electro-Hydraulic Power Mechanism under Sustained Negative Load. Applied Sciences. 2018; 8(6):886. https://doi.org/10.3390/app8060886
Chicago/Turabian StyleLiu, Wei, Yunhua Li, and Dong Li. 2018. "Review on Inlet/Outlet Oil Coordinated Control for Electro-Hydraulic Power Mechanism under Sustained Negative Load" Applied Sciences 8, no. 6: 886. https://doi.org/10.3390/app8060886
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.