Implications of Rigid Gripping Constraints on Clubhead Dynamics in Steel Golf Shafts
by
Tom W. Corke
1,2, 
Nils F. Betzler
2,3,
Eric S. Wallace
1,
Martin Strangwood
4 and
Steve R. Otto
2,* 1
Sport and Exercise Sciences Research Institute, Ulster University, Newtownabbey BT37 0QB, UK
2
R&A Rules Ltd., St. Andrews KY16 9JD, UK
3
Qualisys AB, Kvarnbergsgatan 2, 411 05 Gothenburg, Sweden
4
School of Metallurgy & Materials, The University of Birmingham, Edgbaston, Birmingham B15 2TT, UK
*
Author to whom correspondence should be addressed.
Appl. Sci. 2018, 8(3), 422; https://doi.org/10.3390/app8030422
Submission received: 31 January 2018
/
Revised: 1 March 2018
/
Accepted: 2 March 2018
/
Published: 12 March 2018
(This article belongs to the Special Issue Sports Materials)
Abstract
:Featured Application
The strain propagation findings presented in this paper justify the continued use of golf robots in studies investigating steel-shafted clubhead dynamics at ball impact, given that the gripping mechanism has a negligible effect on the collision dynamics.
abstract
Research and equipment testing with golf robots offers much greater control and manipulation of experimental variables compared to tests using human golfers. However, whilst it is acknowledged that the club gripping mechanism of a robot is dissimilar to that of a human, there appears to be no scientific findings on the effects of these gripping differences on the clubhead at ball impact. Theoretical and experimental strain propagation rates from the clubhead to the grip and back to the clubhead were determined during robot testing with a 9-iron to determine if this time interval was sufficiently short to permit the gripping mechanism to have an effect on the clubhead during impact. Longitudinal strain appears to propagate the most quickly, but such deflections are likely to be small and therefore of little meaningful consequence. Shaft bending was not a primary concern as modes of large enough amplitude appear to propagate too slowly to be relevant. Torsional strain propagates at a rate which suggests that constraints at the grip end of a golf club could potentially influence impact dynamics for steel shafted irons; however, this effect seems unlikely to be significant, a likelihood that decreases further for longer irons. As such, it is considered reasonable to treat the influence of a robot’s gripping mechanism on clubhead dynamics at impact as negligible, and therefore comparisons between robot and human data in this regard are valid.
1. Introduction
Golf robots are an integral part of the process of testing golf clubs as they overcome many of the limitations imposed by player tests. Despite much research into their operation and application, little effort has been dedicated to following up on recommendations to evaluate the effect of the robot gripping mechanism [1,2,3]. The gripping mechanism commonly adopts the form of a rigid ‘clamp’, which has been shown to impose very different constraints on a club’s dynamic response when compared to both human hand-held and freely-suspended conditions [4]. Given the brevity of a typical impact between club and ball in golf, the influence of the shaft on the dynamics of the clubhead during impact has long been considered negligible [5,6,7], however there is little empirical evidence to support this assumption. Although the rigid gripping mechanism will undoubtedly have some effect on the dynamics of the club when considering a robot swing in its entirety, the dynamic response of the shaft during the contact period between clubhead and ball is considered to be more pertinent. Whilst some research has been dedicated to achieving a robot swing that is a closer representation to that of golfers’ swings [8,9], the period during which clubhead and ball are in contact has not specifically been investigated during robot testing. Measurement of contact time in golf has been well documented (typically around 0.5 ms at realistic inbound velocities [10,11,12]), however rates at which various modes of vibration travel from the clubhead to the grip are not as widely reported. Experimental results for steel shafts suggest that this duration is around 1 ms [13], although other studies suggest that this would be an order of magnitude smaller for carbon fibre composite shafts [14]. Studies modelling golf club shafts have reported durations of 1–2 ms before any effect of impact is ‘felt’ by the golfer [15,16], although what was meant by ‘felt’ with respect to measurement times was not explicitly stated. It is difficult to make judgements as to whether strain propagates at a great enough speed along a golf shaft to influence impact dynamics based on the reported evidence; the majority of studies suggest it does not [13,15,16], although this is likely to depend largely on material properties.
Thus, the purpose of the present study was to evaluate the potential for the rigid clamping at the grip of a golf club to influence clubhead dynamics during ball impact through the measurement of shaft strain propagation rates. It was hypothesised that the gripping mechanism would not exert greater influence on the clubhead during impact than that associated with the hands of a golfer. The hypothesis was tested by measuring the time taken for vibration to travel from the clubhead to the gripping mechanism and subsequently return to the clubhead.
2. Materials and Methods
Shaft strain propagation rates immediately following ball impact on the club face were theoretically determined and experimentally measured, as outlined below.
2.1. Theoretical Propagation Speeds
Different types of clubhead deflection will induce different types of shaft strain, which travel at different speeds. The consequences and propagation speeds of longitudinal, torsional and bending strains are discussed below. The associated theoretical calculations presented are based upon previous work [17], unless otherwise stated. Material properties have been estimated using MatWeb online databases.
2.1.1. Longitudinal Strain
Movement of the clubhead parallel to the long axis of the shaft results in strain along the shaft’s longitudinal axis (either tension or compression). A shaft is stiffest in this direction, and as a result, any deflections are likely to be of small magnitude and limited consequence. Longitudinal waves are non-dispersive, and as such, their speed does not depend on their frequency. This speed () can be calculated using Equation (1),
where E is the Young’s Modulus of the material, and ρ is the material’s mass density, which for steel, are approximately 200 GPa and 7850 kg·m−3 respectively, resulting in an estimated propagation speed of longitudinal waves in steel of 5048 m·s−1.
2.1.2. Torsional Strain
Rotation of the clubhead about the shaft’s long axis results in torsional strain in the shaft. This is arguably the motion of greatest concern, as the restriction of this form of clubhead rotation during impact would reduce the rate at which the club face opens or closes during an off-centre strike (i.e., towards the toe or heel, relative to the clubhead’s centre of gravity location), and potentially the penalty associated with it. The speed at which torsional waves propagate () is calculated in accordance with Equation (2),
where the shear modulus of the material (G) is used instead of the Young’s Modulus (E). A typical shear modulus of steel is 79 GPa, therefore the propagation speed of torsional waves in this material is approximately 3172 m·s−1. Given the relationship between Young’s and shear moduli, shown in Equation (3),
where ν is Poisson’s ratio, the shear modulus will always be smaller than the Young’s modulus of the same material. Therefore is always smaller than , meaning that the speed of torsional waves will be lower than that of longitudinal waves. Similar to longitudinal waves, torsional waves are non-dispersive.
2.1.3. Bending Strain
The strain created by bending waves is more complex than torsional or longitudinal strain, and is made up of a combination of compressive, tensile and shear strains. Unlike longitudinal and torsional waves, the phase speed of bending waves () does depend on wave frequency (f) and can be expressed as a proportion of (see Equation (1)) as shown in Equation (4),
Frequency testing of the shaft used in the experimental stage of this investigation was used to generate an approximation of the frequency of the first bending mode ( ≈ 5.4 Hz) under a fixed-free condition. Equation (5) [18] can be used to estimate the frequency of the nth bending mode (),
for which , and , were calculated as 34.1, 94.8 and 185.9 Hz respectively. Equation (4) was then used to calculate the corresponding wave speeds ( ≈ 414 m·s−1, ≈ 1040 m·s−1, ≈ 1734 m·s−1 and ≈ 2428 m·s−1). Given that the reduction in energy content with increasing n assumes a Gaussian profile, such that energy ∝ n2, higher order modes were not of concern as their potential effect was considered negligible.
2.2. Experimental Setup
A 9-iron was chosen as the test club as it represents the shortest iron club of interest (excluding wedges) and therefore the shortest distance for the waves to travel. A steel-shafted blade-style 9-iron was assembled to an un-gripped length of 37.75 in (0.908 m), with loft and lie angles of 42° (0.733 rad) and 62.5° (1.091 rad), respectively. The shaft was a commercially available model, featured a tip diameter of 0.355 in (9.017 mm), a butt diameter of 0.600 in (15.24 mm), and was of ‘stepped’ design, i.e., the difference in diameter between the larger butt and smaller tip was achieved using steps, as opposed to a continuous taper. The club was fitted with a commercially available non-corded rubber golf grip. The test club was ‘rigidly clamped’ using a custom-built vice mechanism and positioned in front of a pneumatic ball cannon so that the clubhead was 600–630 mm from the nearest edge of the light gates, as illustrated in Figure 1. The point at which the club was clamped was representative of the gripping mechanism of the golf robot used at The R&A Equipment Test Centre; the robot gripping mechanism encloses approximately the first 0.23 m of the club as measured from the butt of the grip. The requirement of the gripping mechanism was solely that it needed to hold the club so that it could sustain multiple impacts.
An accelerometer was positioned on the back of the clubhead to detect contact between ball and club. Three strain gauges were adhered to the shaft. The first was a gauge measuring torsion positioned on the shaft adjacent to the club’s ferrule (approx. 0.1 m from the accelerometer measured parallel to the club shaft) on the ‘underside’ of the shaft, i.e., it would not have been visible to a golfer at address. A second gauge measuring torsion was located just beneath the grip (0.6 m from the accelerometer) on the same aspect of the shaft as the first gauge. A third gauge measuring longitudinal strain was located diametrically opposite to the second torsion gauge. Given that a fully-compensated circuit could not be achieved with the available resources, this third gauge offered reassurance that torsion was only being measured by the second torsion gauge, and that no cross-talk was occurring.
The accelerometer signal was split between two two-channel data acquisition devices to ensure synchronisation (the acceleration signal was used to trigger the measurement). The remaining channel of each device acquired a strain signal from one of the three available gauges. A third device was used independently to capture the signals from the light gates monitoring inbound ball speed. All data acquisition devices sampled at a frequency of 10 MHz. Strain signals were subsequently filtered using a third-order Butterworth filter; a cut-off frequency of 20 kHz was deemed appropriate after inspection of the signals in the frequency domain. It is acknowledged that this cut-off frequency may have been somewhat conservative; this was considered sensible however, given the aims of the study and lack of a fully-compensated strain gauge circuit.
Two target inbound speeds were used: 16 and 34 m·s−1. The lower speed permitted a fidelity check in that the strains for this speed should be lower than those for the higher speed. The higher speed was selected to represent 9-iron clubhead speeds generated by elite male amateur golfers (approximately 38.9 m·s−1) [19], however it was a slight underrepresentation as pilot tests with inbound speeds above 34 m·s−1 risked dislocation of the accelerometer from the back of the clubhead. A digital spirit level was used to quantify (±0.2°) the orientation of the clubhead relative to the incoming trajectory of the ball. The shaft was angled such that the effective loft and lie of the clubhead were 26° and 0° respectively (i.e., the grooves were horizontal). Although this effective loft was slightly stronger (2–3°) than has been reported for 9-iron shots performed by elite amateurs [19], it was still considered to offer a realistic representation of clubhead presentation.
The clamping mechanism was then shifted so that the inbound ball would meet the club face at three different impact locations in turn: centre, toe and heel. The centre impact location was located at the geometric centre of the sandblasted area of the club face, whilst toe and heel locations were 17 mm towards the toe and heel of this centre point respectively (measured parallel to the grooves). The centre of gravity of the 9-iron clubhead featured in the study was actually 4 mm towards the heel and sole relative to the geometric centre, when measured in the plane of the club face. This meant that some rotation of the clubhead would be expected at all tested impact locations. Five repeat trials were performed at each of the six combinations of inbound speed and impact location.
2.3. Assumptions
The main assumption underlying the study was that the elastic reaction force at the gripping mechanism created a modified wave that returned along the shaft to the clubhead at the same speed as the initial wave. A linear superposition of the waves was assumed to be formed following this reflection, and as such interaction between wave types was not considered. Calculations and experimental results were based on a static club at impact; when used in a golf robot, the shaft would already be under a considerable amount of strain. However, these elastic stresses and strains (“pre-loading”) would not be expected to affect material properties such as wave propagation speeds. The influence of the rubber grip of the club on strain propagation speeds was also considered negligible but it is noted that a rubber grip would introduce a strain-dependency to the club’s response if strain waves travelled back to the clubhead before the end of the contact time between clubhead and ball.
3. Results
3.1. Inbound Ball Speed and Contact Time
The inbound ball speeds measured by the light gates were slightly lower than the target speeds, although, more importantly, they were consistent across impact locations. Mean (±SD) speeds when averaged across all impact locations were 15.6 (±0.4) and 33.5 (±0.6) m·s−1 for 16 and 34 m·s−1 target inbound speeds respectively. Variation in the centre of the impact location was inspected visually using a grid and found to be within 1 mm. Very little difference was found between the results recorded at the two speeds in terms of contact times. The broad initial peak in the accelerometer signals (Figure 2a) was approximately 0.5 ms in duration for both high and low tested inbound speeds. Contact time for a 9-iron impact does not therefore appear to be significantly different from results presented in previous studies concerning contact time measurement in golf [10,11,12].
In contrast, the amplitude of signals collected at 16 m·s−1 were smaller than those at 34 m·s−1 (Figure 2a). Results collected for the representative elite amateur level of 34 m·s−1 will be focused on in the future discussion.
3.2. Longitudinal Strain Measurement
Figure 2b shows longitudinal strain signals recorded for 34 m·s−1 impacts at centre, toe and heel impact locations. The signal appeared to demonstrate a very subtle departure from resting level at around 0.10 ms after initial contact, although more gross deviations were evident at after 0.50 ms. The latter could be attributable to bending modes: the second or third mode would be most probable in this case, considering their respective propagation speeds. The initial discontinuity occurred at a time reasonably close to that predicted (0.119 ms, see Table 1), although given the relatively small amplitude, this association is difficult to assert with a lot of certainty. These measurements did however offer reassurance that any meaningful strain, either longitudinal or bending, did not appear to be present at the grip until 0.5 ms when measured in this way.
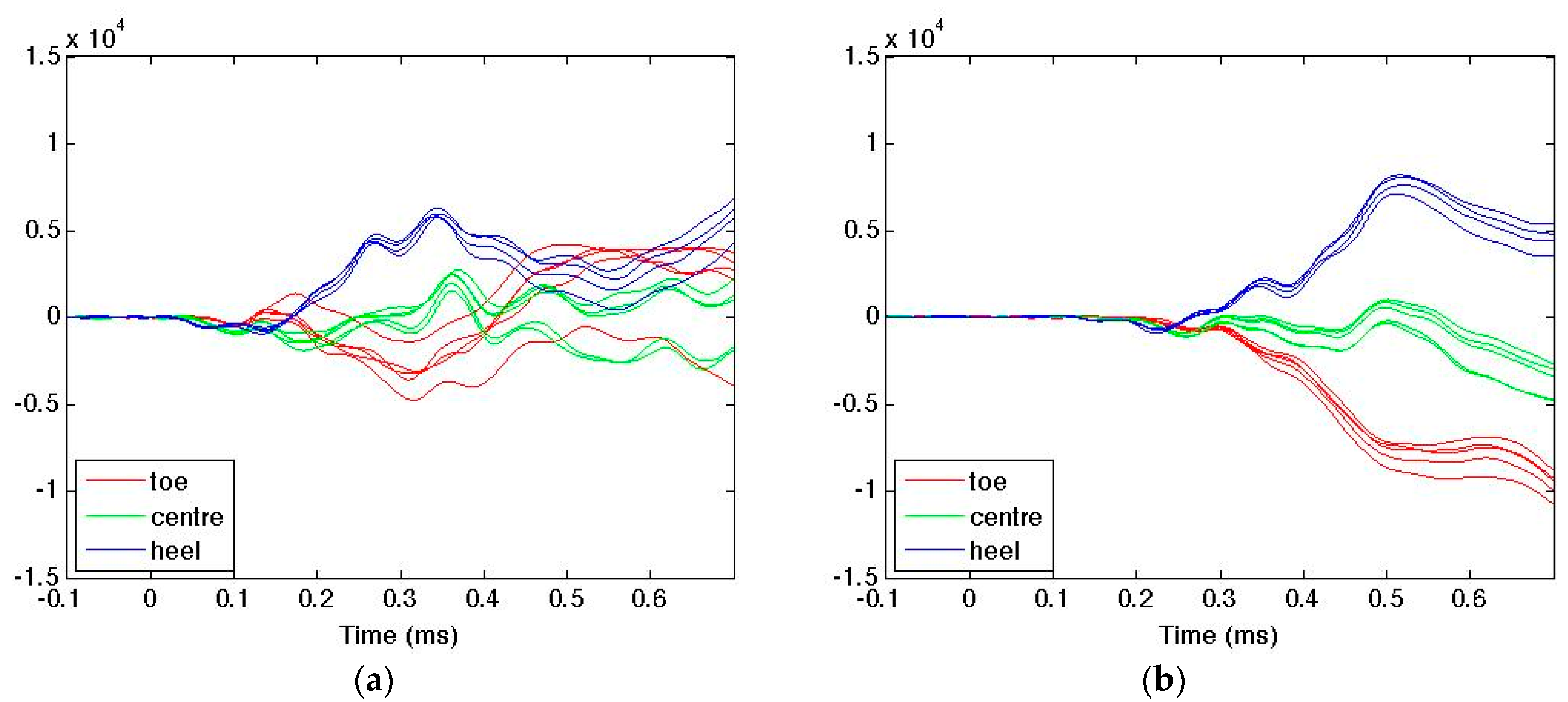
3.3. Torsional Strain Measurement
Given that no significant variation in the longitudinal gauge occurred before 0.5 ms, it was considered safe to assume that anything detected earlier than this in the second torsion gauge (i.e., that situated at the grip) would in fact be torsion. The first indication of torsional strain is much clearer than for longitudinal measurements. It appears that torsional strain is first detected in the tip gauge at around 0.05 ms (Figure 3a), followed by the grip gauge at 0.20 ms (Figure 3b). This duration appears to become slightly shorter as the impact location moves towards the heel of the clubhead. The shorter durations measured for heel impacts agree very well with the predicted values (Table 1).
The positive vertical change in Figure 3a,b corresponds with closing of the club face, whilst a negative change is indicative of opening. The resultant torsion in the shaft therefore agrees with strain which would be expected, based on the current understanding of impact mechanics, following toe and heel impacts respectively, in that the club face opens following a toe impact, and vice versa.
4. Discussion
The critical duration in interpreting the results is double that of the predicted time for strain to reach the gripping mechanism, which assumes an instant reflection of the wave at this point. Doubling this duration accounts for the time taken for the wave to return to the clubhead, having been modified by the constraint at the clamp. If this total duration is longer than contact time between club face and ball, there is arguably no potential for the gripping mechanism to influence impact mechanics, and thus the outcome of the shot. Weaker gripping would make an effect even less likely as it would increase the time it takes until strain is reflected back from the gripping mechanism towards the clubhead.
Longitudinal strain was found to travel fast enough to have an effect (critical duration: 0.274 ms), but, as was stated in the methodology section, it is unlikely that deflections of this type will be large enough to be of any meaningful consequence, due to the shaft’s stiffness in this direction. This viewpoint was vindicated by the very small deflections observed in the longitudinal strain gauge at around 0.1 ms after initial contact. The more gross deflections detected by the longitudinal gauge from 0.5 ms onwards were thought to be lower-order bending modes and were therefore too slow to have any influence on impact dynamics. Given their relative speeds, as were determined earlier using Equations (4) and (5), the first four modes would have taken 1.67, 0.66, 0.40 and 0.28 ms to reach the grip respectively. It is thought that this first mode is perhaps what was referred to in previous studies, which reported 1–2 ms as the time taken for such deflections to reach the grip [13,15,16].
Torsion was described as the strain that was of greatest concern, as per the discussion of theoretical wave speeds. Good agreement was found between measured and predicted timings, particularly for heel impacts and particularly when considering experimental error and scatter. The critical duration for torsional strain would be 0.436 ms, which indicates that the modified waves would return to the clubhead towards the very end of impact for a 9-iron shot. Their amplitude was thought to be great enough that they cannot be considered negligible (as was the case for longitudinal strain), however the degree of influence that they could exert in this last 0.050–0.075 ms of impact is questionable.
Furthermore, as irons become longer the critical duration will approach that of contact time. This means that as the potential for constrained clubhead motion to have a meaningful effect on ball launch conditions becomes even less as irons get longer, although the total length of club required for the critical duration to exceed 0.5 ms would be 1.023 m, based on the current experimental design (i.e., steel shaft, insertion depth of 0.23 m). To provide some context, this is approximately 1 cm longer than the longest iron (1-iron) based on reported industry averages [20], although both 1- and 2-irons are relatively uncommon in the modern game. Many commercial iron sets feature a 3-iron as the longest club, which is typically 3 in longer than a 9-iron taken from the same set, and thus the critical duration would be 0.483 ms.
5. Conclusions
Reasonable agreement has been shown between theoretically calculated strain propagation rates and experimental results (given experimental errors and scatter) collected using an instrumented steel-shafted 9-iron golf club. Longitudinal strain appears to propagate most quickly, but such deflections are likely to be small and therefore of little meaningful consequence. Shaft bending was not a primary concern of the study as modes of large enough amplitude appear to propagate too slowly to be relevant. Torsional strain propagates at a rate which suggests that constraints at the grip end of a golf club could potentially influence impact dynamics for steel shafted irons; however, this effect seems unlikely to be significant, a likelihood that decreases further for longer irons. As such, it is considered reasonable to accept the stated hypothesis and treat the influence of a robot’s gripping mechanism on clubhead dynamics at impact as negligible, and therefore comparisons between robot and human data in this regard are valid. Similar consideration of shafts made from carbon composite materials would be worthwhile for future research, as would adoption of more sophisticated instrumentation that would allow direct comparisons between the influence of rigidly clamped constraints and human hands.
Acknowledgments
This research received partial funding support through a Postgraduate Student Award by the Department for Employment and Learning, Northern Ireland.
Author Contributions
T.W.C., E.S.W., M.S. and S.R.O. conceived and designed the experiments; T.W.C. performed the experiments, analysed the data and wrote the first draft of the paper; N.F.B., E.S.W., M.S. and S.R.O. reviewed the analysis and co-wrote the submitted paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Whittaker, A.; Thomson, R.; McKeown, D.; McCafferty, J. The application of computer-aided engineering techniques in advanced clubhead design. In Proceedings of the World Scientific Congress of Golf, St. Andrews, Scotland, 22–26 July 2002; Cochran, A.J., Ed.; E. & F. N. Spon: London, UK, 1990; pp. 286–291. [Google Scholar]
- Milne, R.D.; Davis, J.P. The role of the shaft in the golf swing. J. Biomech. 1992, 25, 975–983. [Google Scholar] [CrossRef]
- Harper, T. The Efficacy of a Golf Robot for Simulating Indvidual Golfer’s Swings. Ph.D. Thesis, Loughborough University, Loughborough, UK, 2007. [Google Scholar]
- Wicks, A.L.; Knight, C.E.; Braunwart, P.; Neighbors, J. Dynamics of a golf club. In Proceedings of the 17th International Modal Analysis Conference, Kissimmee, FL, USA, 8–11 February 1999; pp. 503–508. [Google Scholar]
- Cochran, A.J.; Stobbs, J. Search for the Perfect Swing; Triumph Books: Chicago, IL, USA, 1968. [Google Scholar]
- Daish, C.B. The Physics of Ball Games; English Universities Press: London, UK, 1979. [Google Scholar]
- Iwatsubo, T.; Kawamura, S.; Miyamoto, K.; Yamaguchi, T. Numerical analysis of golf club head and ball at various impact points. Sports Eng. 2000, 3, 195–204. [Google Scholar] [CrossRef]
- Harper, T.; Roberts, J.R.; Jones, R.; Carrott, A.J. Development and evaluation of new control algorithms for a mechanical golf swing device. Proc. Inst. Mech. Eng. Part 1 J. Syst. Control Eng. 2008, 222, 595–604. [Google Scholar] [CrossRef] [Green Version]
- Roberts, J.R.; Harper, T.; Jones, R. Development of a golf robot for simulating individual golfer’s swings. Procedia Eng. 2010, 2, 2643–2648. [Google Scholar] [CrossRef]
- Johnson, S.H.; Lieberman, B.B. Experimental determination of apparent contact time in normal impact. In Science and Golf IV; Thain, E., Ed.; Routledge: London, UK, 2002; pp. 524–530. [Google Scholar]
- Arakawa, K.; Mada, T.; Komatsu, H.; Shimizu, T.; Satou, M.; Takehara, K.; Etoh, G. Dynamic Contact Behavior of a Golf Ball During an Oblique Impact. Exp. Mech. 2006, 46, 691–697. [Google Scholar] [CrossRef]
- Roberts, J.R.; Jones, R.; Rothberg, S. Measurement of contact time in short duration sports ball impacts: An experimental method and correlation with the perceptions of elite golfers. Sports Eng. 2001, 4, 191–203. [Google Scholar] [CrossRef] [Green Version]
- Horwood, G.P. Golf shafts—A technical perspective. In Science and Golf II; Cochran, A.J., Farrally, M.R., Eds.; E. & F. N. Spon: London, UK, 1994; pp. 247–258. [Google Scholar]
- Masuda, M.; Kojima, S. Kick back effect of club-head at impact. In Science and Golf II; Cochran, A.J., Farrally, M.R., Eds.; E. & F. N. Spon: London, UK, 1994; pp. 284–289. [Google Scholar]
- Nesbit, S.M.; Hartzell, T.A.; Nalevanko, J.C.; Starr, R.M.; White, M.G.; Anderson, J.R.; Gerlacki, J.N. A Discussion of Iron Golf Club Head Inertia Tensors and Their Effects on the Golfer. J. Appl. Biomech. 1996, 12, 449–469. [Google Scholar] [CrossRef]
- Whittaker, A. A study of the dynamics of the golf club. Sports Eng. 1998, 1, 115–124. [Google Scholar] [CrossRef]
- Rossing, T.D.; Russell, D.A. Laboratory observation of elastic waves in solids. Am. J. Phys. 1990, 58, 1153–1162. [Google Scholar] [CrossRef]
- Hall, D.E. Musical Acoustics, 2nd ed.; Brooks/Cole Pub. Co.: Pacific Grove, CA, USA, 1991. [Google Scholar]
- Corke, T.W.; Betzler, N.F.; Wallace, E.S.; Otto, S.R. Clubhead presentation and spin control capability of elite golfers. Procedia Eng. 2013, 60, 136–142. [Google Scholar] [CrossRef]
- Wishon, T.W. The New Search for the Perfect Golf Club; Fireship Press: Tuscon, AZ, USA, 2011. [Google Scholar]
Figure 1.
Experimental setup for strain measurement.
Figure 2.
(a) Accelerometer signal recorded for five central impacts at both nominal inbound speeds; and (b) longitudinal strain signals (measured at the grip) for five trials at each of the three impact locations at nominal inbound speed: 34 m·s−1.
Figure 2.
(a) Accelerometer signal recorded for five central impacts at both nominal inbound speeds; and (b) longitudinal strain signals (measured at the grip) for five trials at each of the three impact locations at nominal inbound speed: 34 m·s−1.
Figure 3.
Torsional strain signals measured at the tip (a) and grip (b) for five trials at each of the three impact locations at 34 m·s−1.
Figure 3.
Torsional strain signals measured at the tip (a) and grip (b) for five trials at each of the three impact locations at 34 m·s−1.


{kind=link}
{kind=link}
{kind=link}
Table 1.
Theoretical (predicted) and measured timings (following initial contact) for longitudinal and torsional strain. Values in ms unless otherwise stated.
Table 1.
Theoretical (predicted) and measured timings (following initial contact) for longitudinal and torsional strain. Values in ms unless otherwise stated.
| Location | Distance (m) | Longitudinal | Torsional | ||
|---|---|---|---|---|---|
| Predicted | Measured | Predicted | Measured | ||
| Tip | 0.10 | 0.020 | - | 0.032 | 0.03–0.06 |
| Grip | 0.60 | 0.119 | ≈0.1 | 0.190 | 0.19–0.22 |
| Clamp | 0.69 | 0.137 | - | 0.218 | - |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Corke, T.W.; Betzler, N.F.; Wallace, E.S.; Strangwood, M.; Otto, S.R. Implications of Rigid Gripping Constraints on Clubhead Dynamics in Steel Golf Shafts. Appl. Sci. 2018, 8, 422. https://doi.org/10.3390/app8030422
AMA Style
Corke TW, Betzler NF, Wallace ES, Strangwood M, Otto SR. Implications of Rigid Gripping Constraints on Clubhead Dynamics in Steel Golf Shafts. Applied Sciences. 2018; 8(3):422. https://doi.org/10.3390/app8030422
Chicago/Turabian StyleCorke, Tom W., Nils F. Betzler, Eric S. Wallace, Martin Strangwood, and Steve R. Otto. 2018. "Implications of Rigid Gripping Constraints on Clubhead Dynamics in Steel Golf Shafts" Applied Sciences 8, no. 3: 422. https://doi.org/10.3390/app8030422
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.