
Robust Backstepping Control of Wing Rock Using Disturbance Observer


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Formulation and Preliminaries
2.1. Problem Statement
2.2. Neural Networks
2.3. Review of the Extended State Observer
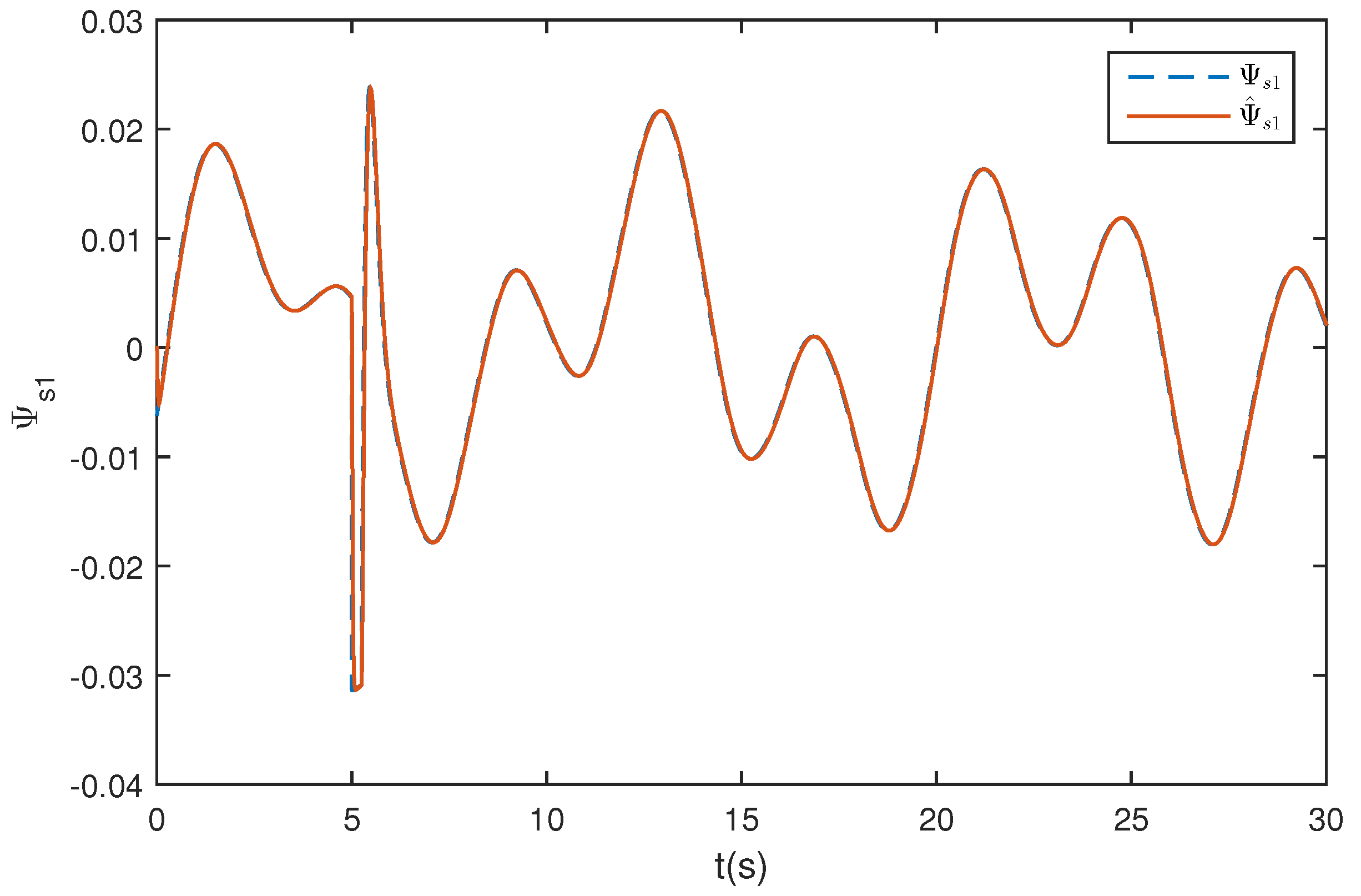
3. Design of Disturbance Observer
3.1. Design of Disturbance Observer for the First Subsystem
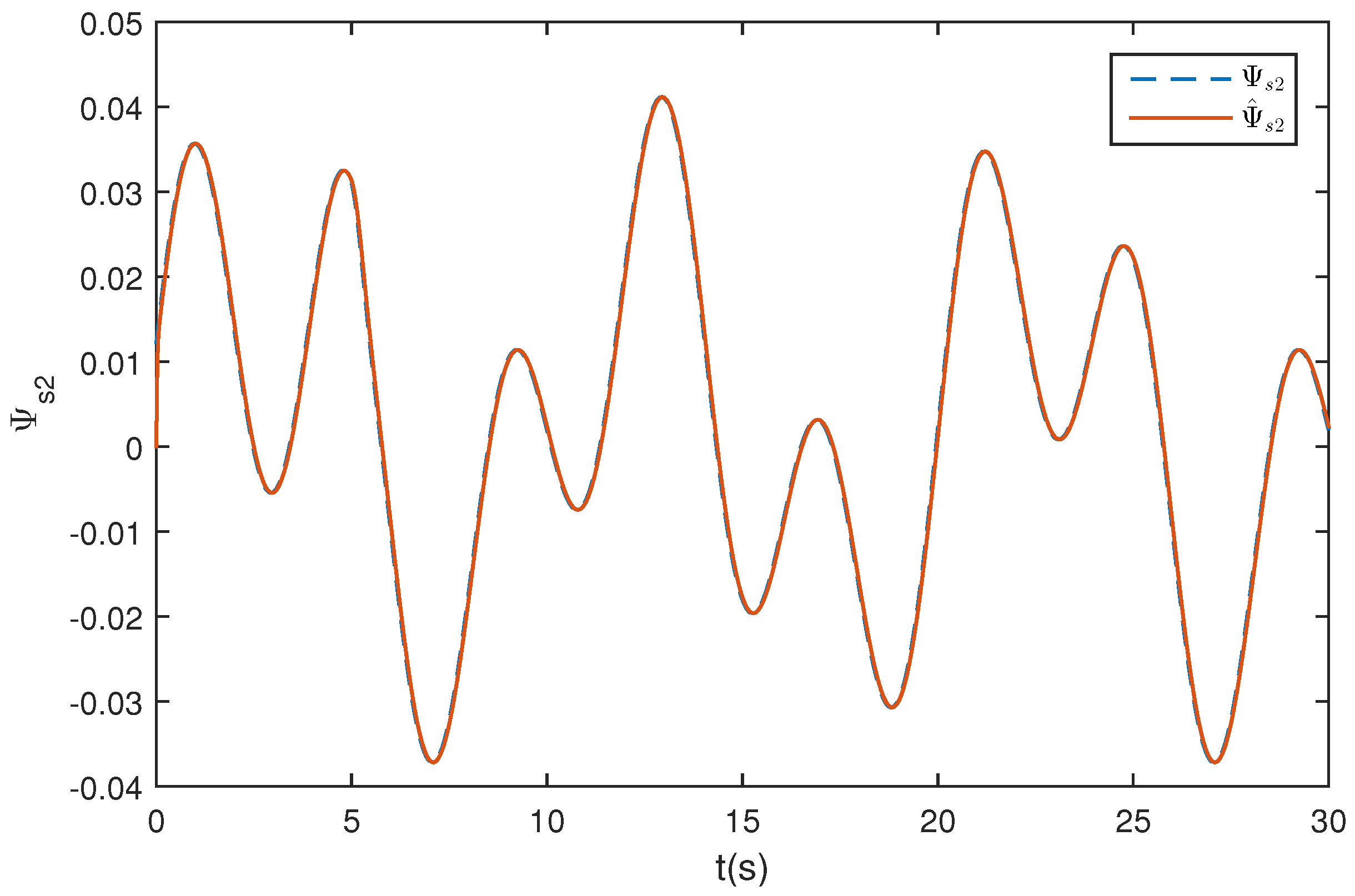
3.2. Design of Disturbance Observer for the Second Subsystem
4. Design of Robust Backstepping Attitude Control Based on Disturbance Observer
5. Simulation Study
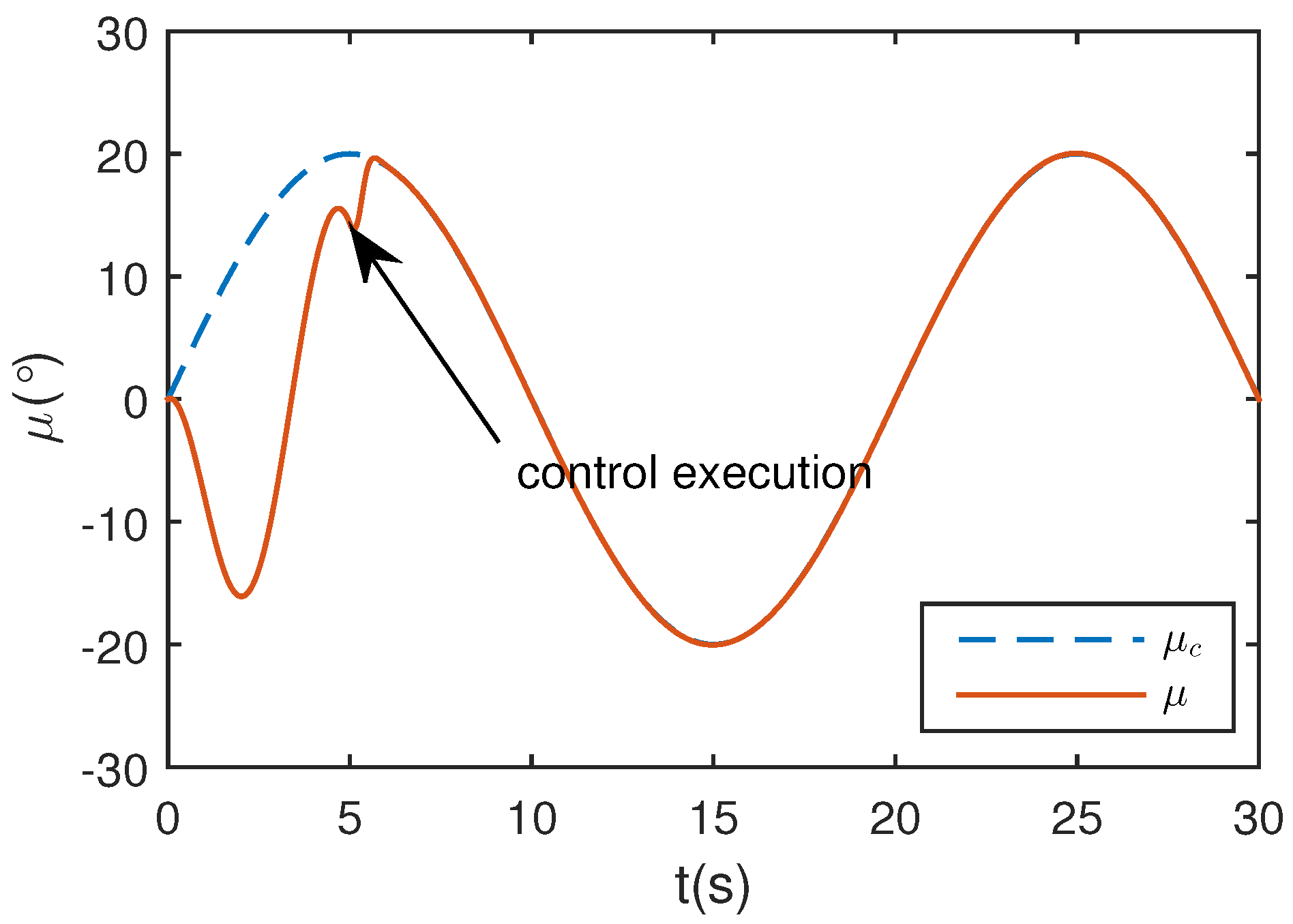
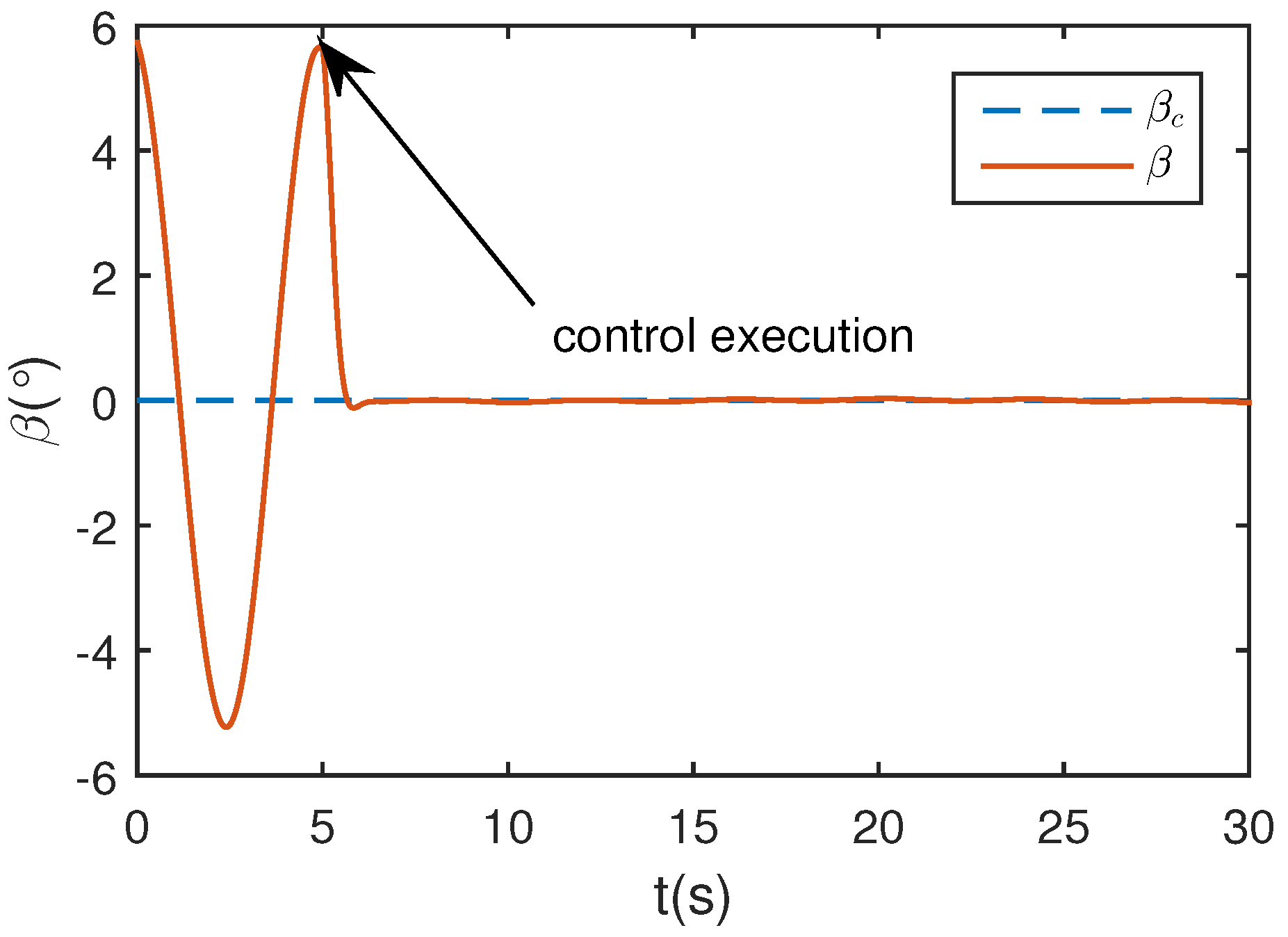
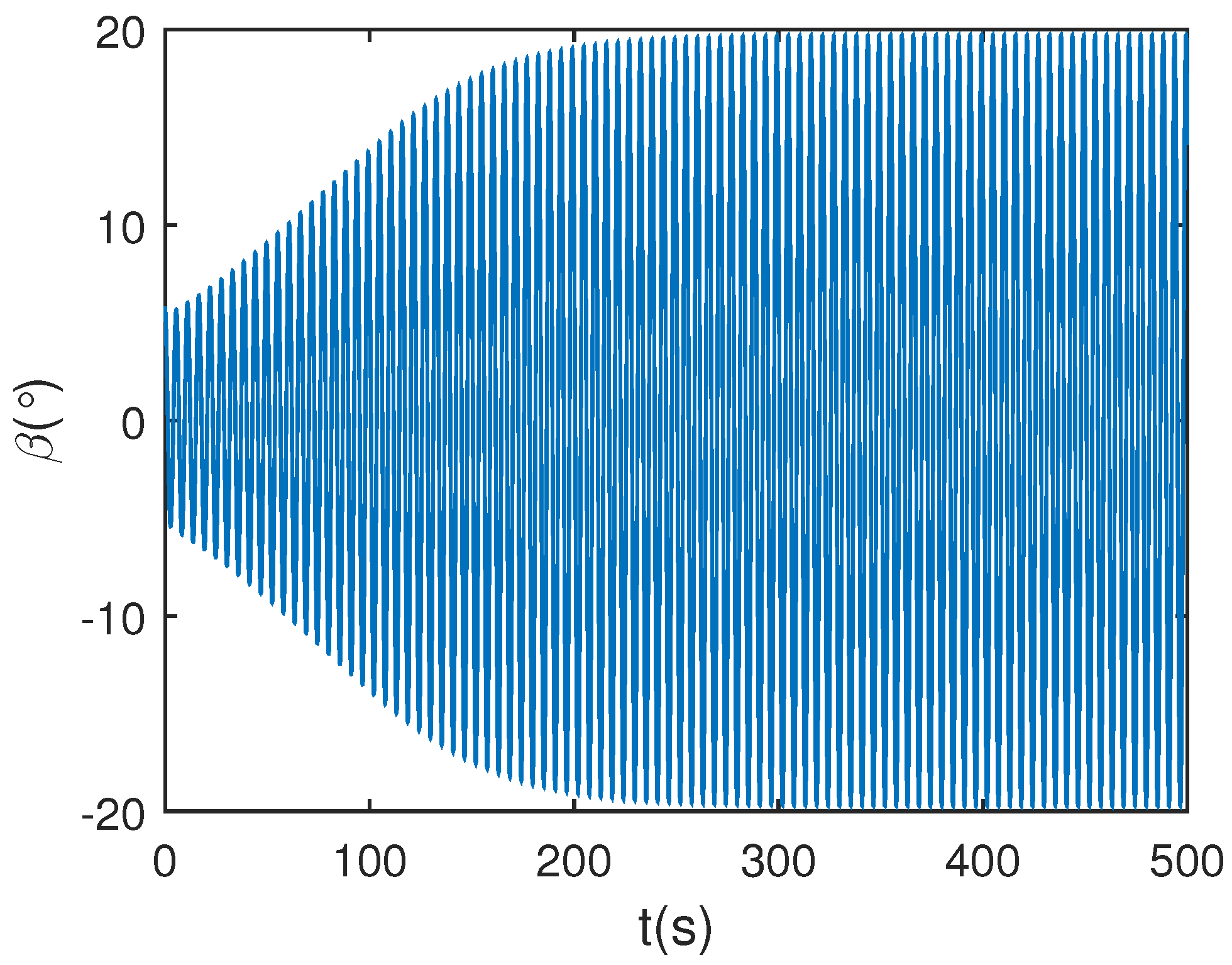
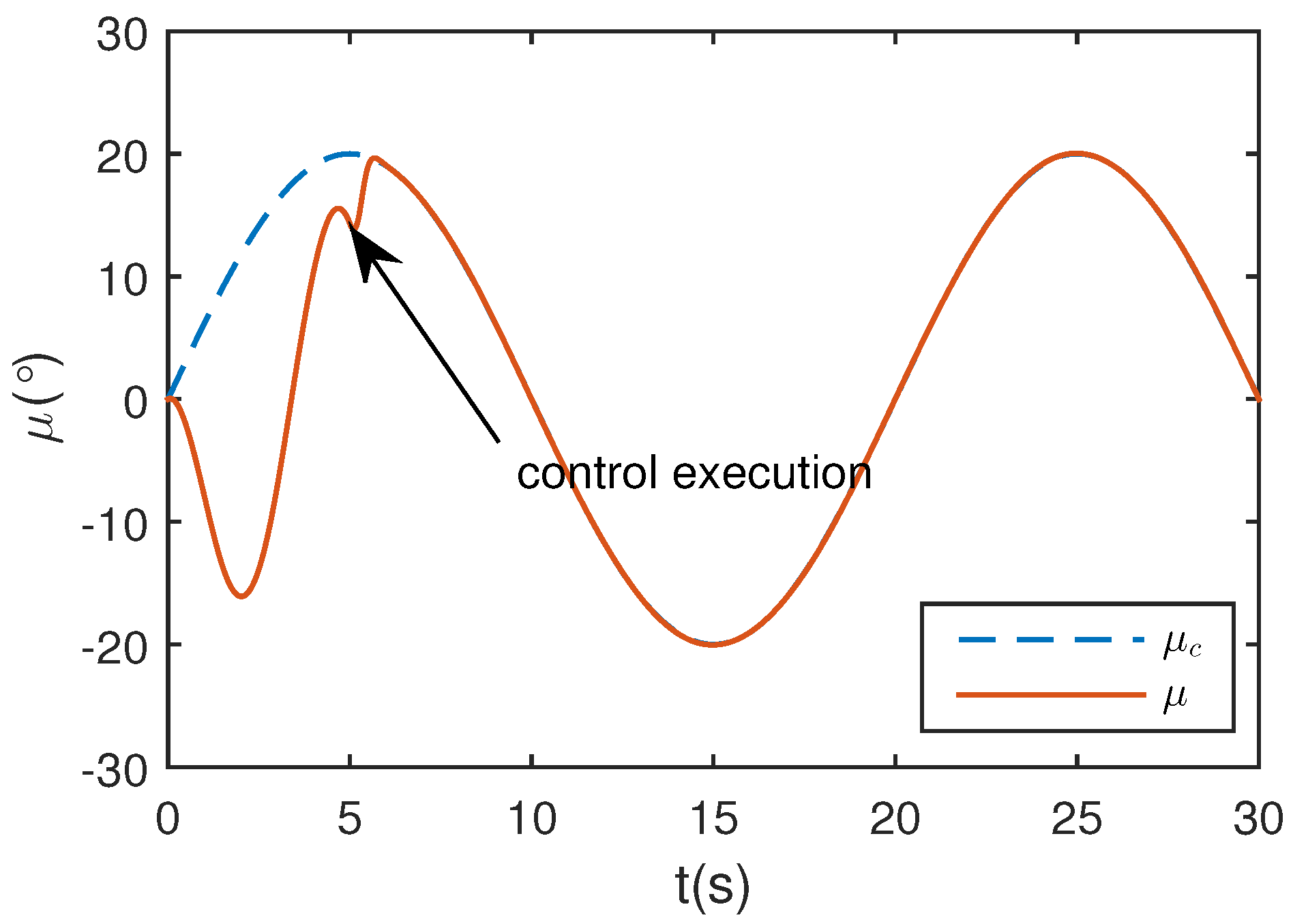
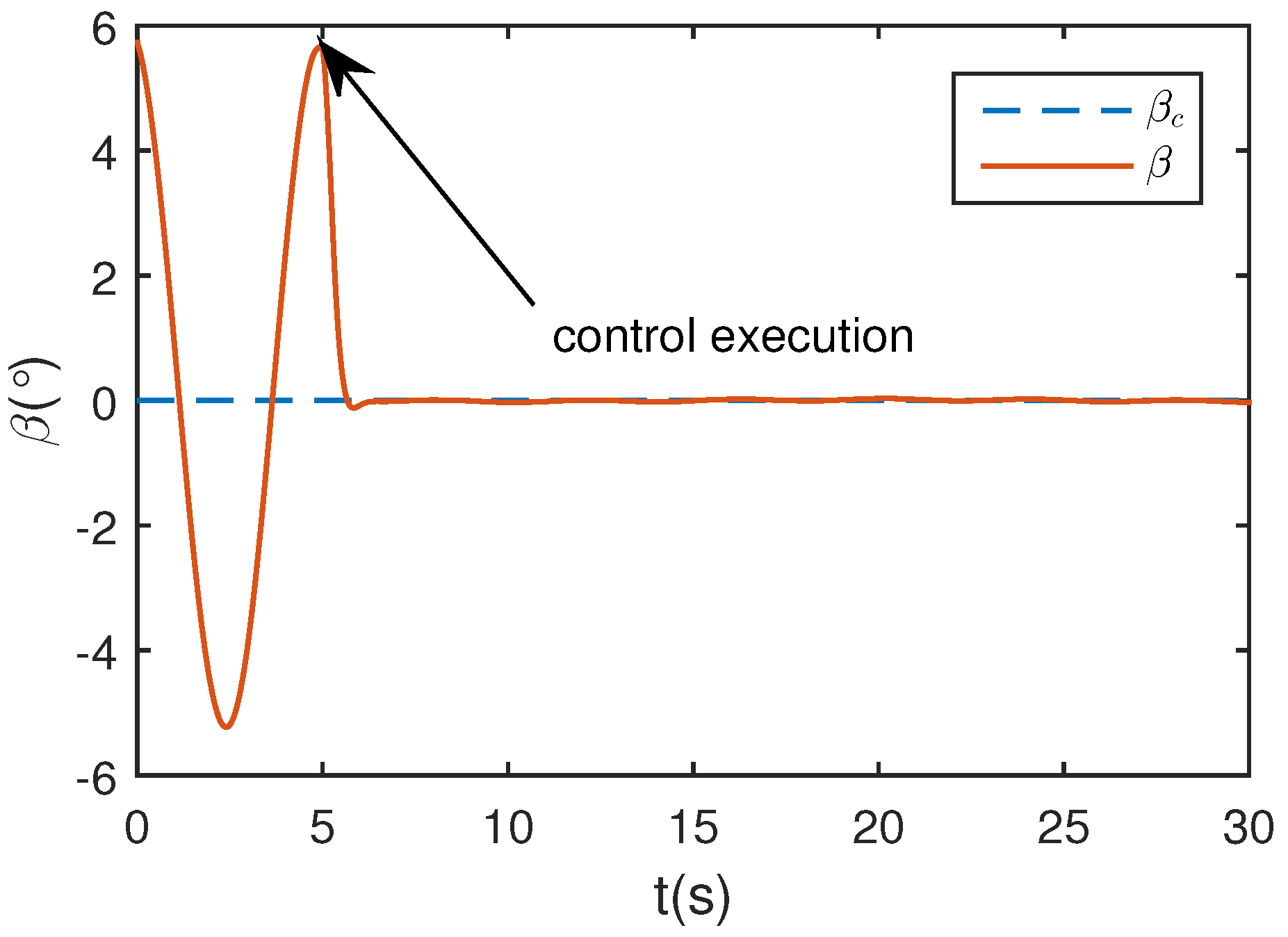
5.1. Wing Rock Control
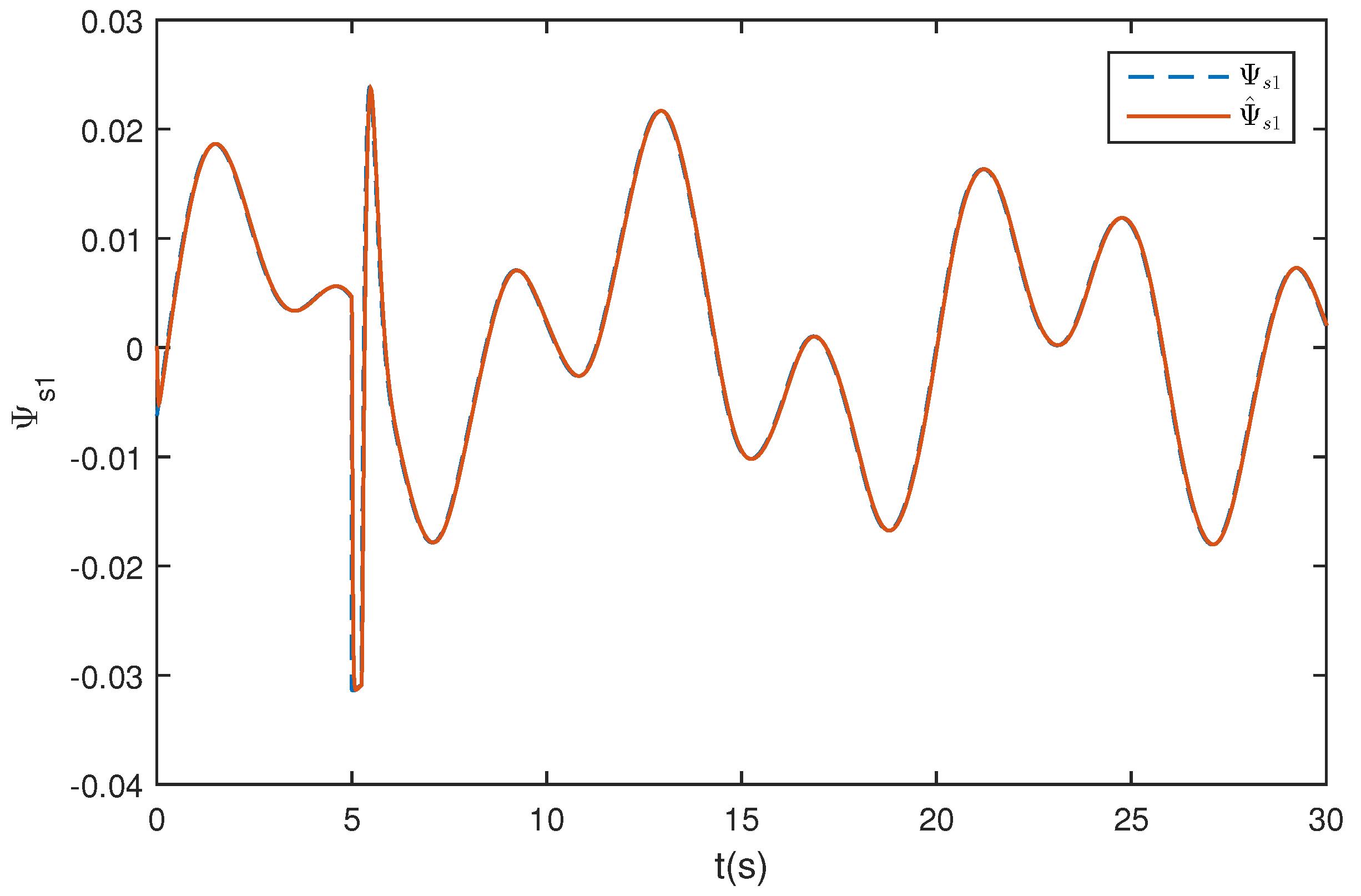
5.2. Comparison with Traditional ESO
5.3. Wing Rock Control under Narrow-Band Disturbances
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
Appendix B
References
- Schmidt, L.V. Wing rock due to aerodynamic hysteresis. J. Aircr. 1979, 16, 129–133. [Google Scholar] [CrossRef]
- Lie, F.A.P.; Go, T.H. Analysis of single degree-of-freedom wing rock due to aerodynamic hysteresis. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007.
- Hsu, C.H.; Lan, C.E. Theory of wing rock. J. Aircr. 1985, 22, 920–924. [Google Scholar] [CrossRef]
- Go, T.H.; Ramnath, R.V. Analysis of the two-degree-of-freedom wing rock in advanced aircraft. J. Guid. Control Dyn. 2002, 25, 324–333. [Google Scholar] [CrossRef]
- Go, T.H.; Ramnath, R.V. Analytical theory of three-degree-of-freedom aircraft wing rock. J. Guid. Control Dyn. 2004, 27, 657–664. [Google Scholar] [CrossRef]
- Elzebda, J.M.; Nayfeh, A.H.; Mook, D.T. Development of an analytical model of wing rock for slender delta wings. J. Aircr. 1989, 26, 737–743. [Google Scholar] [CrossRef]
- Jain, H.; Kaul, V.; Ananthkrishnan, N. Parameter estimation of unstable, limit cycling systems using adaptive feedback linearization: Example of delta wing roll dynamics. J. Sound Vib. 2005, 287, 939–960. [Google Scholar] [CrossRef]
- Rubio-Hervas, J.; Zhao, D.; Reyhanoglu, M. Nonlinear feedback control of self-sustained thermoacoustic oscillations. Aerosp. Sci. Technol. 2015, 41, 209–215. [Google Scholar] [CrossRef]
- Capello, E.; Guglieri, G.; Sartori, D. Performance evaluation of an L1 adaptive controller for wing-body rock suppression. J. Guid. Control Dyn. 2012, 35, 1702–1708. [Google Scholar] [CrossRef]
- Anavatti, S.G.; Choi, J.Y.; Wong, P.P. Design and implementation of fuzzy logic controller for wing rock. Int. J. Control Automa. Syst. 2004, 2, 494–500. [Google Scholar]
- Liu, Z.L. Reinforcement adaptive fuzzy control of wing rock phenomena. IEE Proc. Control Theory Appl. 2005, 152, 615–620. [Google Scholar] [CrossRef]
- Kayacan, E.; Cigdem, O.; Kaynak, O. Sliding mode control approach for online learning as applied to type-2 fuzzy neural networks and its experimental evaluation. IEEE Trans. Ind. Electron. 2012, 59, 3510–3520. [Google Scholar] [CrossRef]
- Hsu, C.F.; Lin, C.M.; Chen, T.Y. Neural-network-identification-based adaptive control of wing rock motions. IEE Proc. Control Theory Appl. 2005, 152, 65–71. [Google Scholar] [CrossRef]
- Lin, C.M.; Hsu, C.F. Supervisory recurrent fuzzy neural network control of wing rock for slender delta wings. IEEE Trans. Fuzzy Syst. 2004, 12, 733–742. [Google Scholar] [CrossRef]
- Hsu, C.F.; Lin, C.M.; Lee, T.T. Wavelet adaptive backstepping control for a class of nonlinear systems. IEEE Trans. Neural Netw. 2006, 17, 1175–1183. [Google Scholar] [PubMed]
- Kuperman, A.; Zhong, Q.C. Disturbance observer assisted robust control of wing rock motion based on contraction theory. Simulation 2013, 89, 1128–1136. [Google Scholar] [CrossRef]
- Kuperman, A.; Zhong, Q.C. UDE-based linear robust control for a class of nonlinear systems with application to wing rock motion stabilization. Nonlinear Dyn. 2015, 81, 789–799. [Google Scholar] [CrossRef]
- Kori, D.K.; Kolhe, J.P.; Talole, S.E. Extended state observer based robust control of wing rock motion. Aerosp. Sci. Technol. 2014, 33, 107–117. [Google Scholar] [CrossRef]
- Li, H.; Gao, H.; Shi, P. New passivity analysis for neural networks with discrete and distributed delays. IEEE Trans. Neural Netw. 2010, 21, 1842–1847. [Google Scholar] [PubMed]
- Wu, L.; Feng, Z.; Zheng, W.X. Exponential stability analysis for delayed neural networks with switching parameters: Average dwell time approach. IEEE Trans. Neural Netw. 2010, 21, 1396–1407. [Google Scholar] [PubMed]
- Wu, L.; Feng, Z.; Lam, J. Stability and synchronization of discrete-time neural networks with switching parameters and time-varying delays. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 1957–1972. [Google Scholar] [CrossRef] [PubMed]
- Chen, M.; Ge, S.S.; How, B.V.E. Robust adaptive neural network control for a class of uncertain MIMO nonlinear systems with input nonlinearities. IEEE Trans. Neural Netw. 2010, 21, 796–812. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Q.; Shi, P.; Xu, S.; Li, H. Observer-based adaptive neural network control for nonlinear stochastic systems with time delay. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 71–80. [Google Scholar] [CrossRef] [PubMed]
- He, W.; Chen, Y.; Yin, Z. Adaptive neural network control of an uncertain robot with full-state constraints. IEEE Trans. Cybern. 2016, 46, 620–629. [Google Scholar] [CrossRef] [PubMed]
- Han, J. A class of extended state observers for uncertain systems. Control Decis. 1995, 10, 85–88. [Google Scholar]
- Su, Y.X.; Duan, B.Y.; Zheng, C.H.; Zhang, Y.F.; Chen, G.D.; Mi, J.W. Disturbance-rejection high-precision motion control of a Stewart platform. IEEE Trans. Control Syst. Technol. 2004, 12, 364–374. [Google Scholar] [CrossRef]
- Zheng, Q.; Dong, L.; Lee, D.H.; Gao, Z. Active disturbance rejection control for MEMS gyroscopes. IEEE Trans. Control Syst. Technol. 2009, 17, 1432–1438. [Google Scholar] [CrossRef]
- Shi, P.; Yin, Y.; Liu, F. Gain-scheduled worst-case control on nonlinear stochastic systems subject to actuator saturation and unknown information. J. Optim. Theory Appl. 2013, 156, 844–858. [Google Scholar] [CrossRef]
- Shi, P.; Yin, Y.; Liu, F.; Zhang, J. Robust control on saturated Markov jump systems with missing information. Inf. Sci. 2014, 265, 123–138. [Google Scholar] [CrossRef]
- Li, H.; Wang, J.; Shi, P. Output-feedback based sliding mode control for fuzzy systems with actuator saturation. IEEE Trans. Fuzzy Syst. 2016, 24, 1282–1293. [Google Scholar] [CrossRef]
- Wang, H.; Chen, B.; Liu, X.; Lin, C. Adaptive neural tracking control for stochastic nonlinear strict-feedback systems with unknown input saturation. Inf. Sci. 2014, 269, 300–315. [Google Scholar] [CrossRef]
- Xiao, B.; Hu, Q.; Zhang, Y. Adaptive sliding mode fault tolerant attitude tracking control for flexible spacecraft under actuator saturation. IEEE Trans. Control Syst. Technol. 2012, 20, 1605–1612. [Google Scholar] [CrossRef]
- Sonneveldt, L.; Chu, Q.P.; Mulder, J.A. Nonlinear flight control design using constrained adaptive backstepping. J. Guid. Control Dyn. 2007, 30, 322–336. [Google Scholar] [CrossRef]
- Lin, D.; Wang, X.; Yao, Y. Fuzzy neural adaptive tracking control of unknown chaotic systems with input saturation. Nonlinear Dyn. 2012, 67, 2889–2897. [Google Scholar] [CrossRef]
- Wu, J.; Li, J.; Chen, W. Semi-globally/globally stable adaptive NN backstepping control for uncertain MIMO systems with tracking accuracy known a priori. J. Frankl. Inst. 2014, 351, 5274–5309. [Google Scholar] [CrossRef]
- Alexis, K.; Nikolakopoulos, G.; Tzes, A. Switching model predictive attitude control for a quadrotor helicopter subject to atmospheric disturbances. Control Eng. Pract. 2011, 19, 1195–1207. [Google Scholar] [CrossRef]
- Sui, S.; Tong, S.; Li, Y. Adaptive fuzzy backstepping output feedback tracking control of MIMO stochastic pure-feedback nonlinear systems with input saturation. Fuzzy Sets Syst. 2014, 254, 26–46. [Google Scholar] [CrossRef]
- Tan, Y.; Chang, J.; Tan, H. Adaptive backstepping control and friction compensation for AC servo with inertia and load uncertainties. IEEE Trans. Ind. Electron. 2003, 50, 944–952. [Google Scholar]
- Jamil, M.U.; Kongprawechnon, W.; Raza, M.Q. Adaptive neural network based backstepping control design for MIMO nonlinear systems with actuator nonlinearities. Aircr. Eng. Aerosp. Technol. Int. J. 2016, 88, 137–150. [Google Scholar] [CrossRef]
- Snell, S.A.; Enns, D.F.; Garrard, W.L. Nonlinear Inversion Flight Control for a Supermaneuverable Aircraft. J. Guid. Control Dyn. 1992, 15, 976–984. [Google Scholar] [CrossRef]
- Klein, V.; Murphy, P.C. Estimation of Aircraft Nonlinear Unsteady Parameters From Wind Tunnel Data; National Aeronautics and Space Administration, Langley Research Center: Hampton, VA, USA, 1998. [Google Scholar]
- Zou, Y.; Zheng, Z. A robust adaptive RBFNN augmenting backstepping control approach for a model-scaled helicopter. IEEE Trans. Control Syst. Technol. 2015, 23, 2344–2352. [Google Scholar] [CrossRef]
- Chen, Z.Q.; Sun, M.W.; Yang, R.G. On the stability of linear active disturbance rejection control. Acta Autom. Sin. 2013, 39, 574–580. [Google Scholar] [CrossRef]
- Shao, X.L.; Wang, H.L. The performance analysis on linear extended state observer and its extension case with higher extended order. Control Decis. 2015, 30, 815–822. [Google Scholar]
- Zheng, Q.; Gao, L.Q.; Gao, Z. On validation of extended state observer through analysis and experimentation. J. Dyn. Syst. Meas. Control 2012, 134, 024505. [Google Scholar] [CrossRef]
- Guo, B.Z.; Zhao, Z.L. On convergence of non-linear extended state observer for multi-input multi-output systems with uncertainty. IET Control Theory Appl. 2012, 6, 2375–2386. [Google Scholar] [CrossRef]
- Baumann, W.T.; Ho, F.S.; Robertshaw, H.H. Active structural acoustic control of broadband disturbances. J. Acoust. Soc. Am. 1992, 92, 1998–2005. [Google Scholar] [CrossRef]










© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, D.; Chen, M.; Gong, H.; Wu, Q. Robust Backstepping Control of Wing Rock Using Disturbance Observer. Appl. Sci. 2017, 7, 219. https://doi.org/10.3390/app7030219
Wu D, Chen M, Gong H, Wu Q. Robust Backstepping Control of Wing Rock Using Disturbance Observer. Applied Sciences. 2017; 7(3):219. https://doi.org/10.3390/app7030219
Chicago/Turabian StyleWu, Dawei, Mou Chen, Huajun Gong, and Qingxian Wu. 2017. "Robust Backstepping Control of Wing Rock Using Disturbance Observer" Applied Sciences 7, no. 3: 219. https://doi.org/10.3390/app7030219