
Reallocating Charging Loads of Electric Vehicles in Distribution Networks


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Control Algorithm
2.1. Objective Function
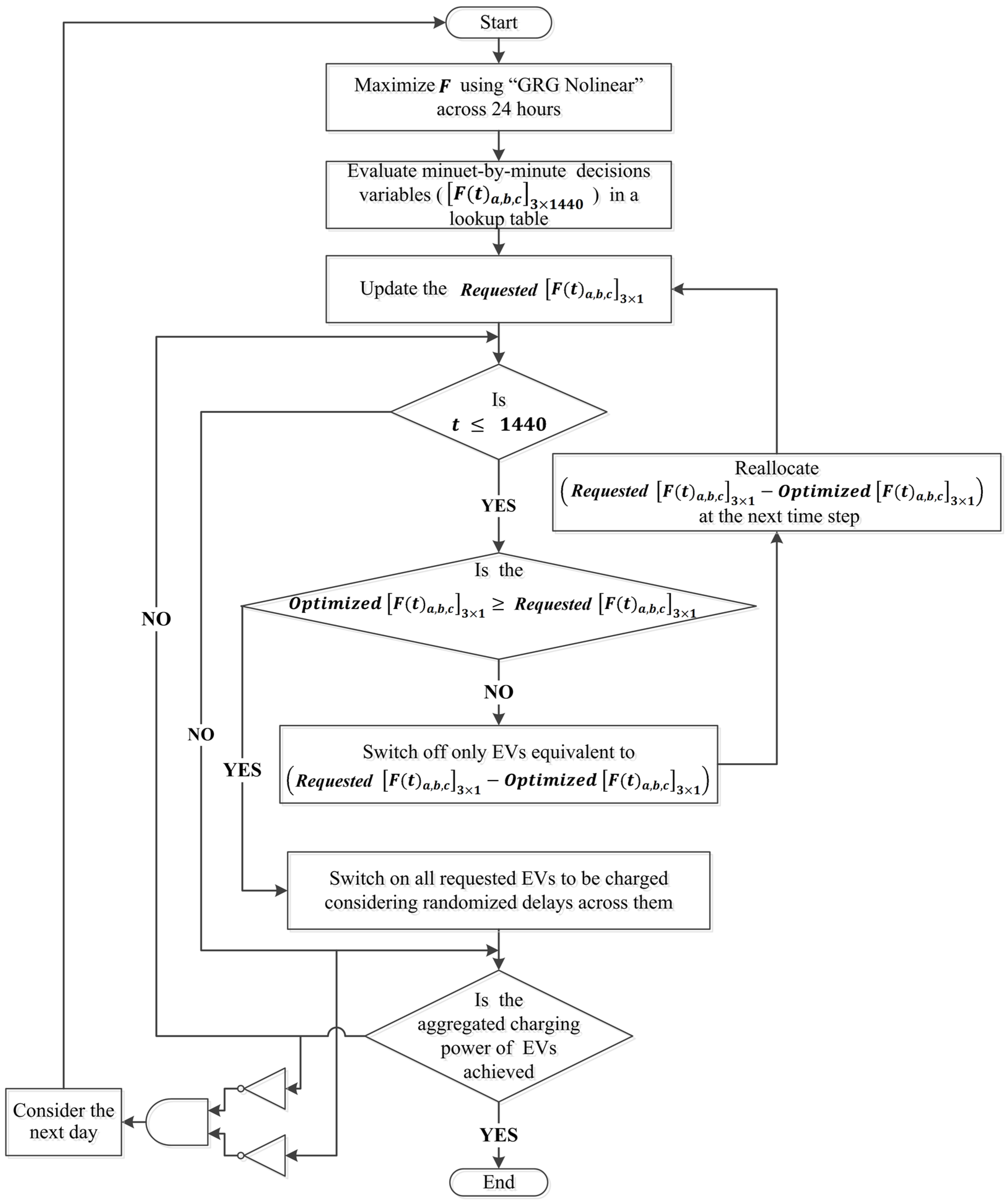
2.2. Control Algorithm
3. Non-iterative Unbalanced Power Flow Calculations
4. Configurations of the System under Study
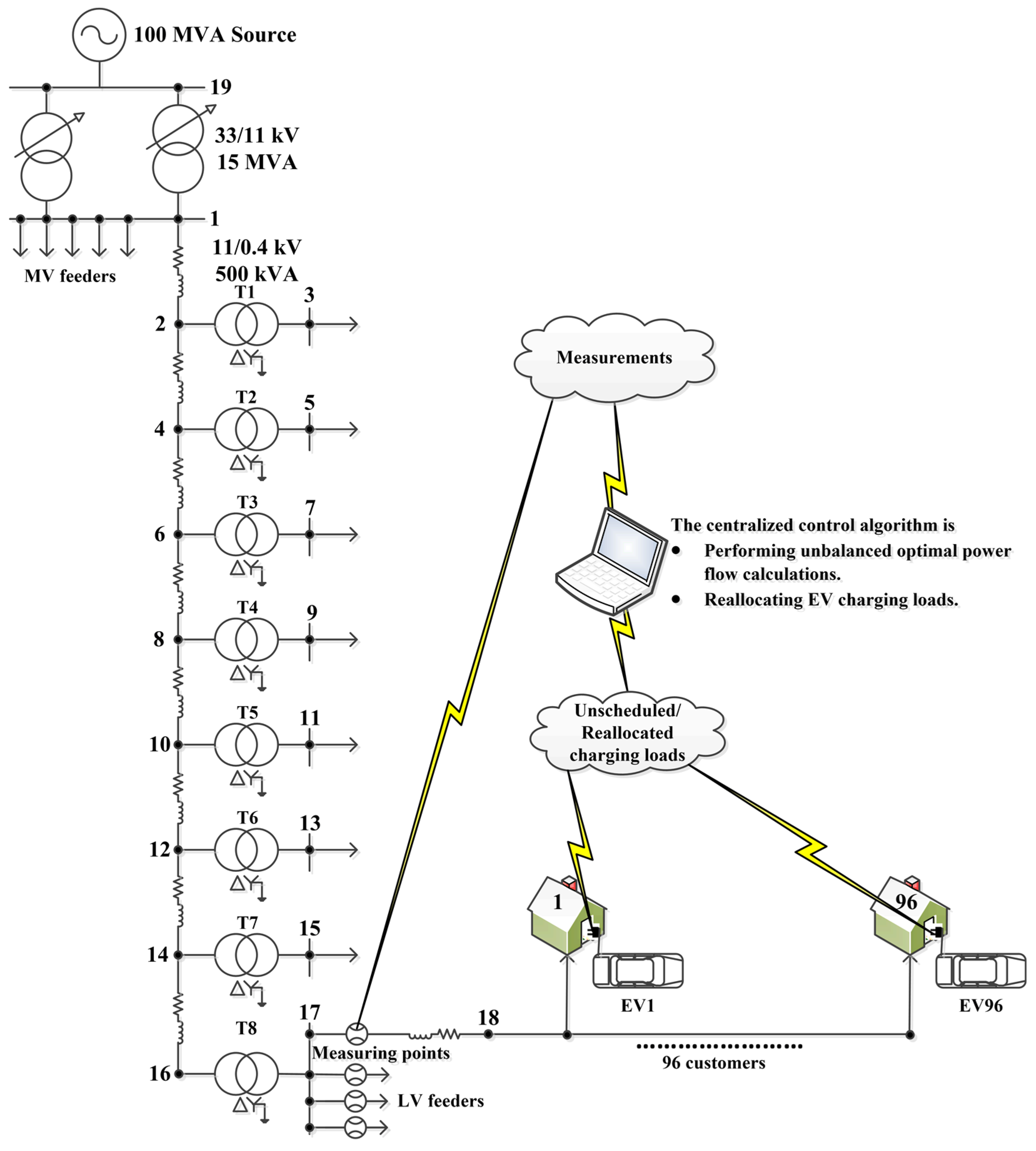
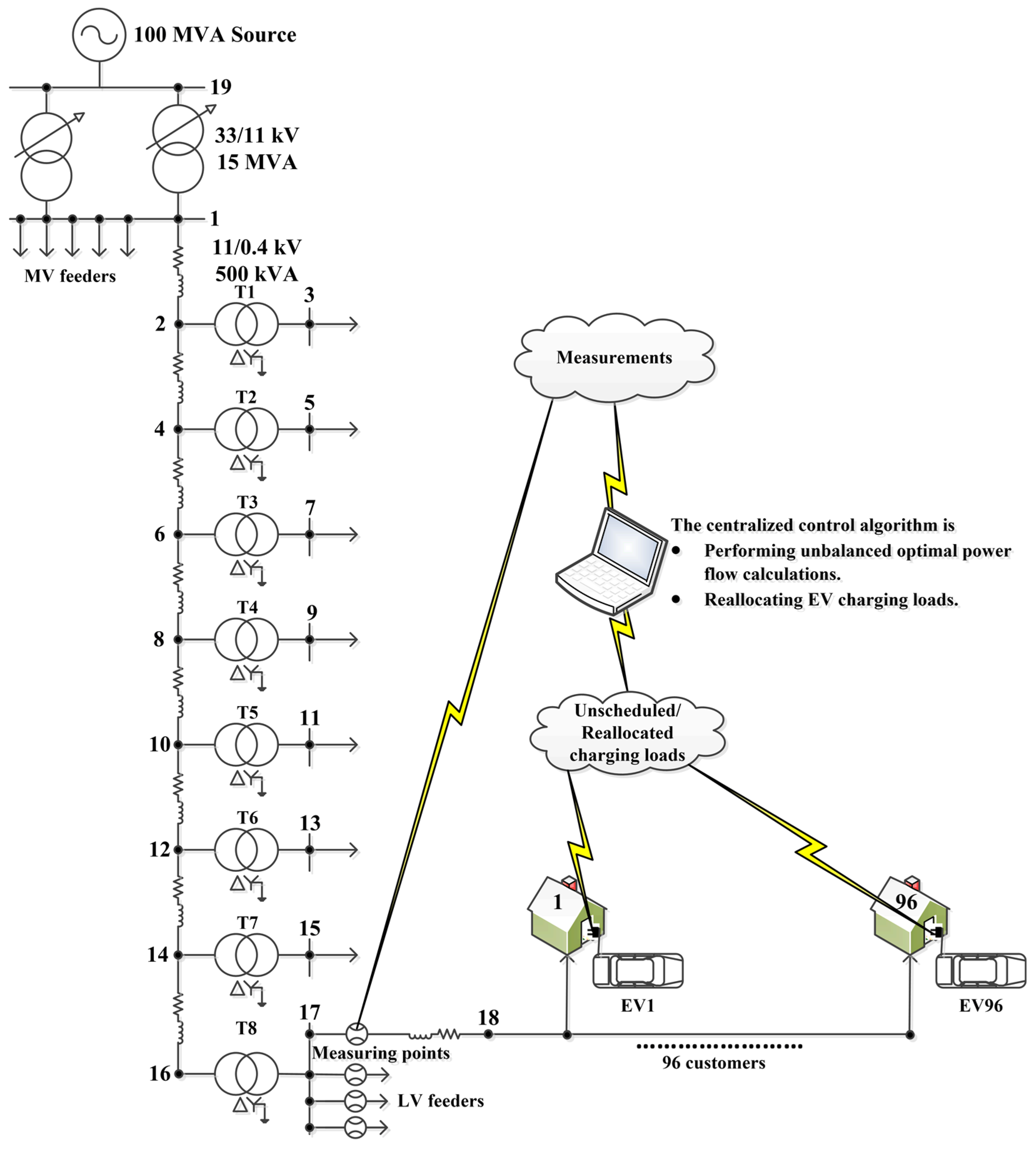
4.1. The Network under Study
- Calculation of the total power at node 1 using Equations (13) and (14).
- Calculation of the total current at node 1 using Equation (11).
- Calculation of the phase voltages at node 2 using Equation (12).
- Sequentially repeat the above calculations to determine the phase voltages at nodes 2, 4, 6, 8, 10, 12, 14, and 16.
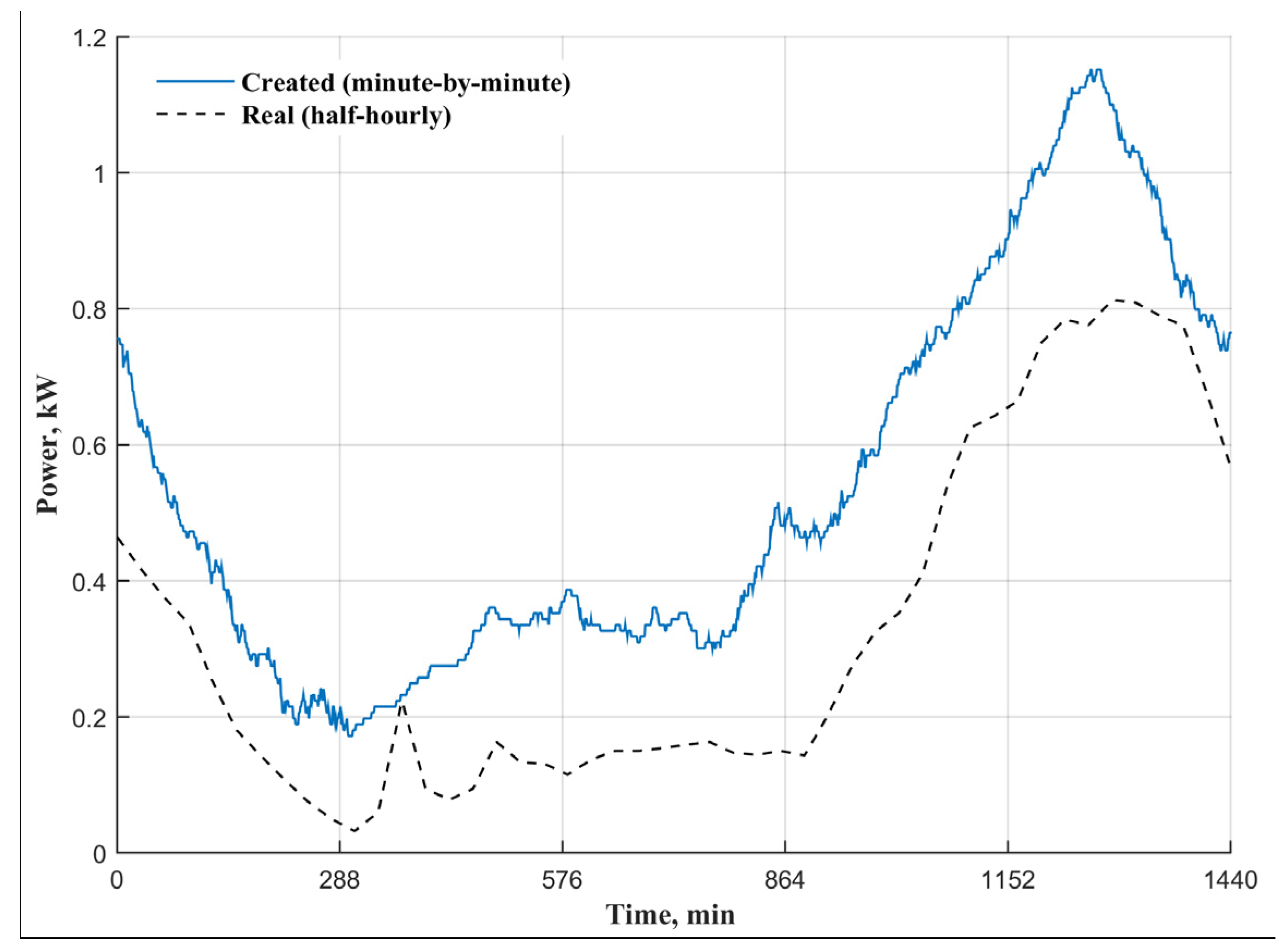
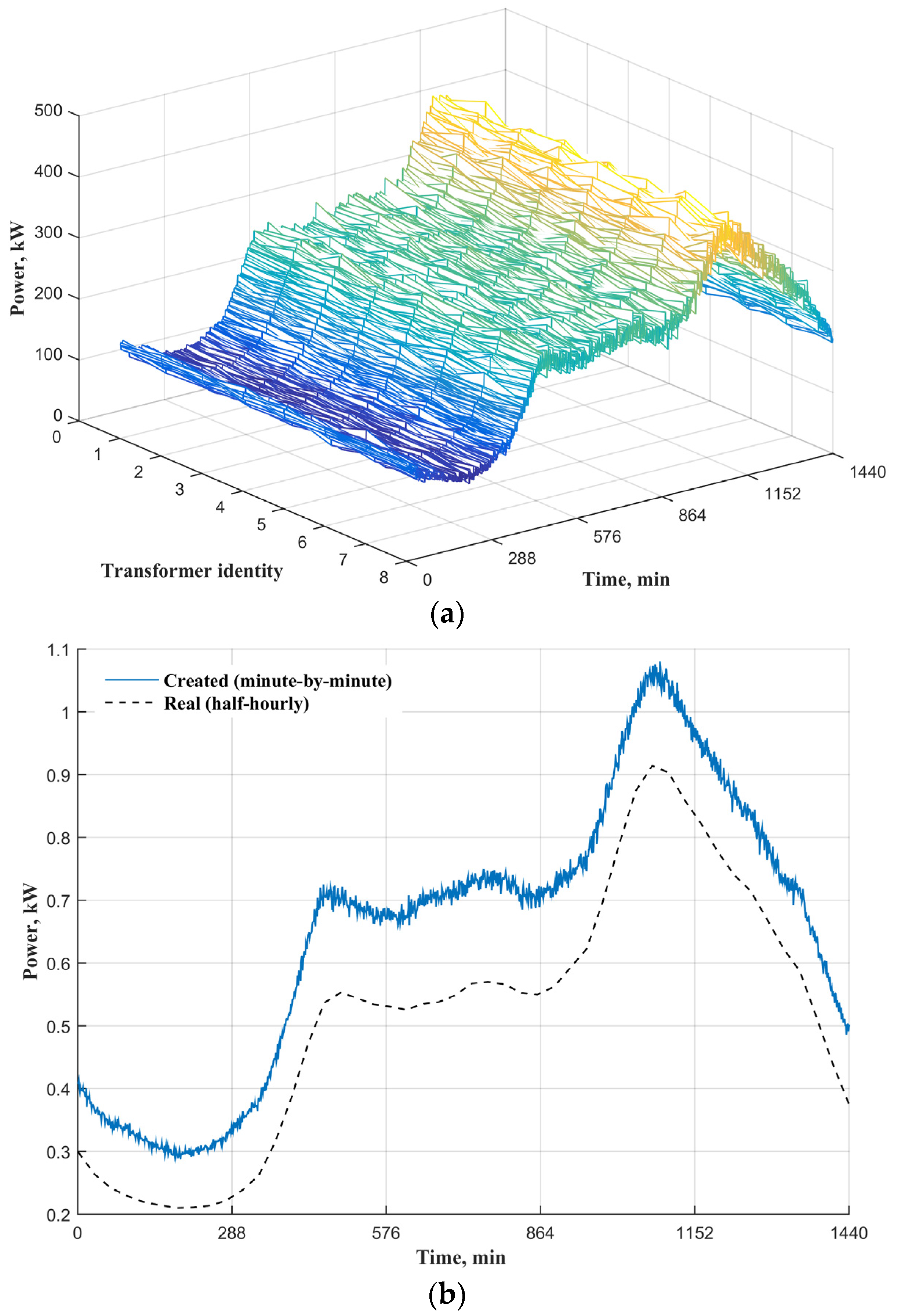
4.2. Residential Load Model
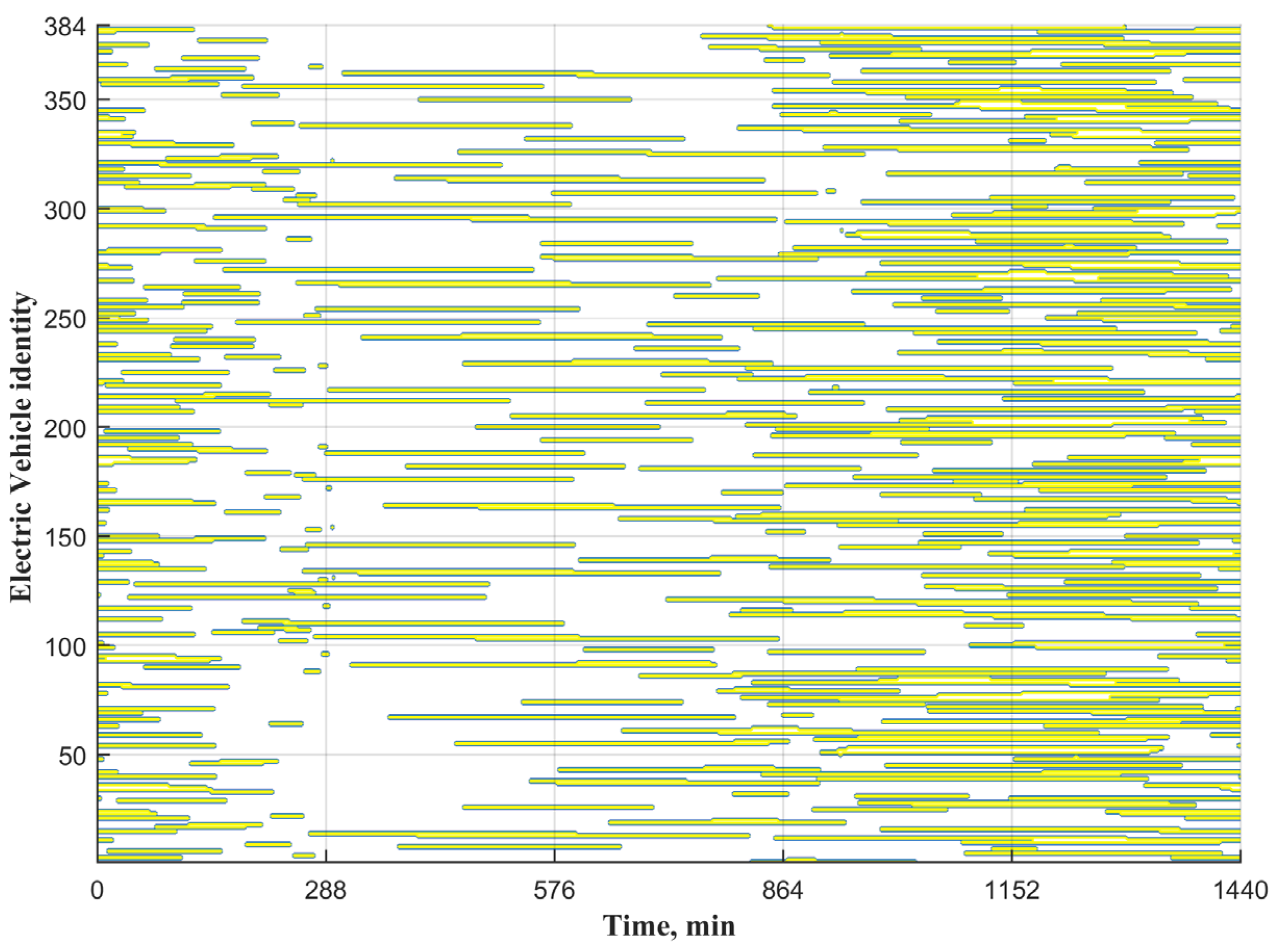
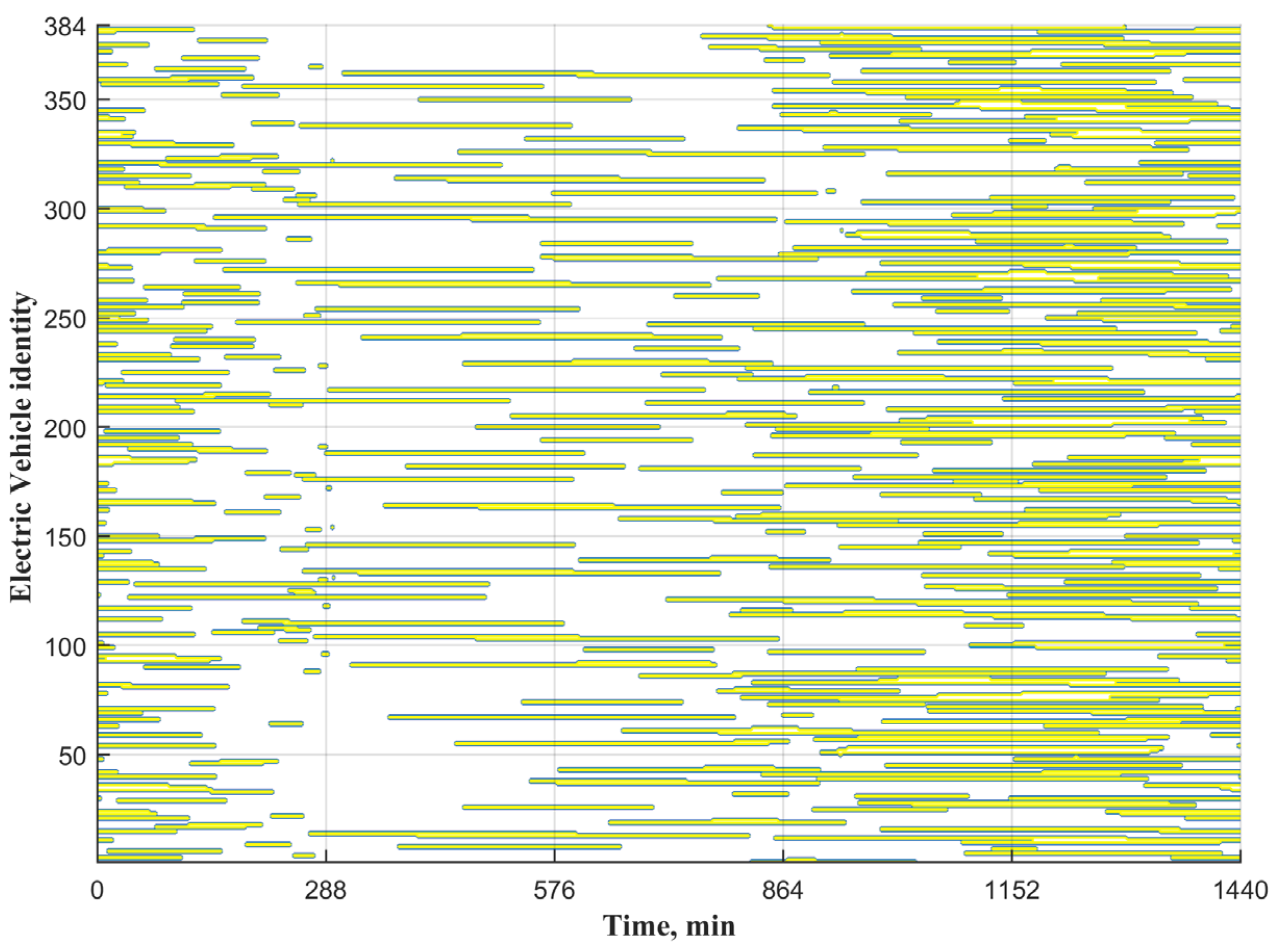
4.3. Electric Vehicle Load Model
- Generate the requested minutes for charging each EV (less than or equal 480 min a day) using the “randi” function.
- Synthesize the daily load profile of each EV by assigning zero for idle state and one for charging state.
- Concatenate minute-by-minute the charging profiles of 384 EVs in one matrix ().
- Shift charging loads of the produced matrix according to arrival and departure times to match the pattern of the real daily mean profile from [31].
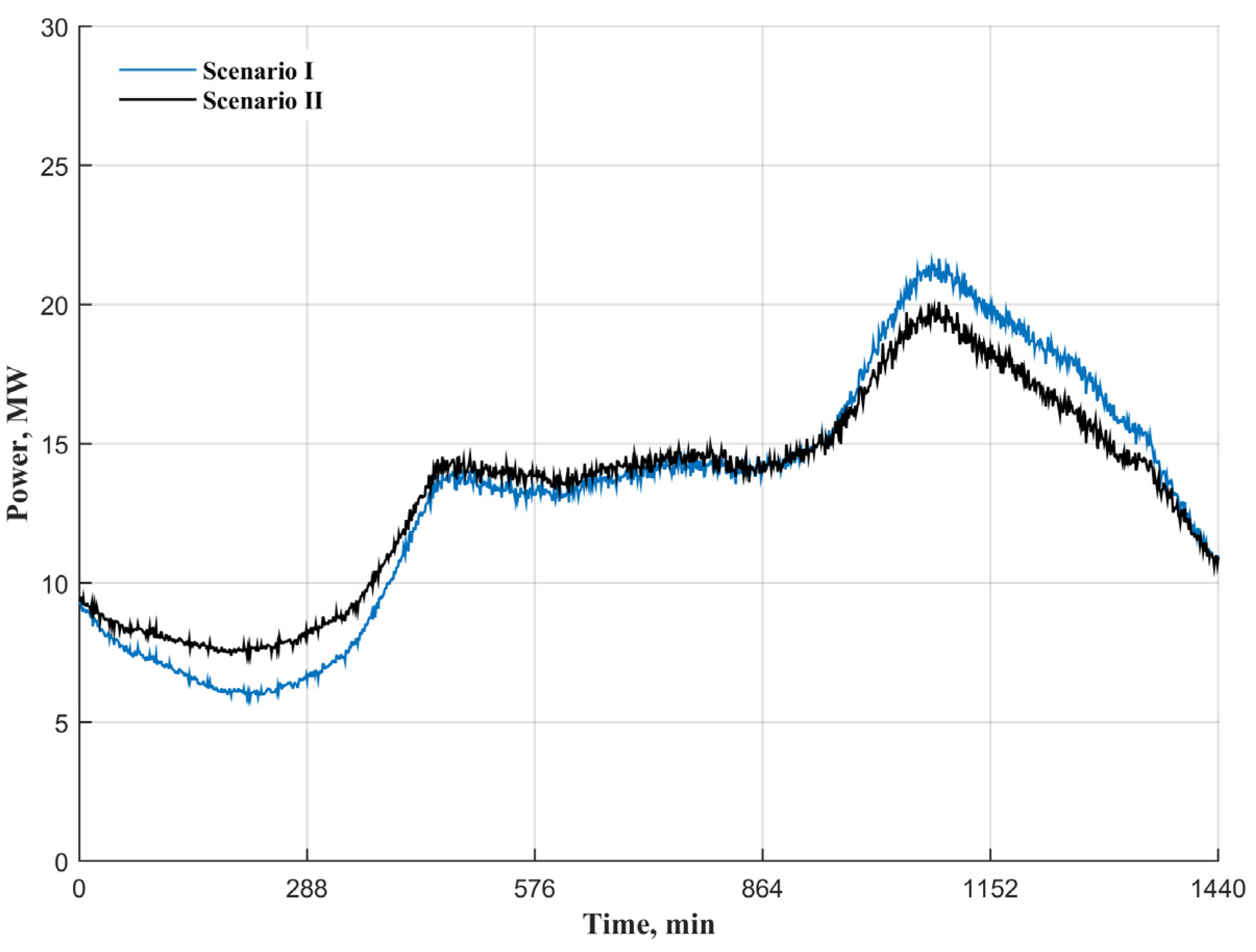
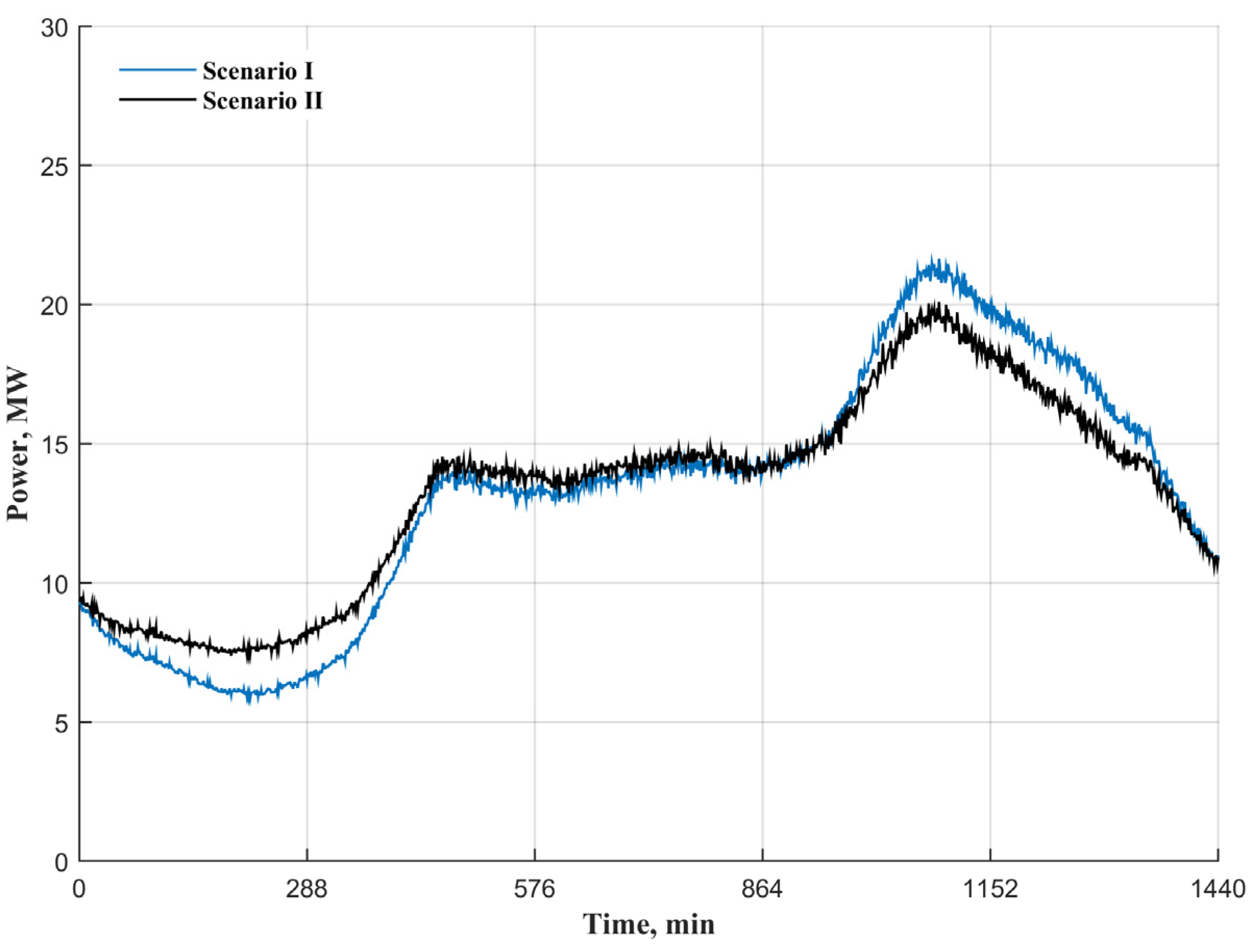
5. Simulation Results
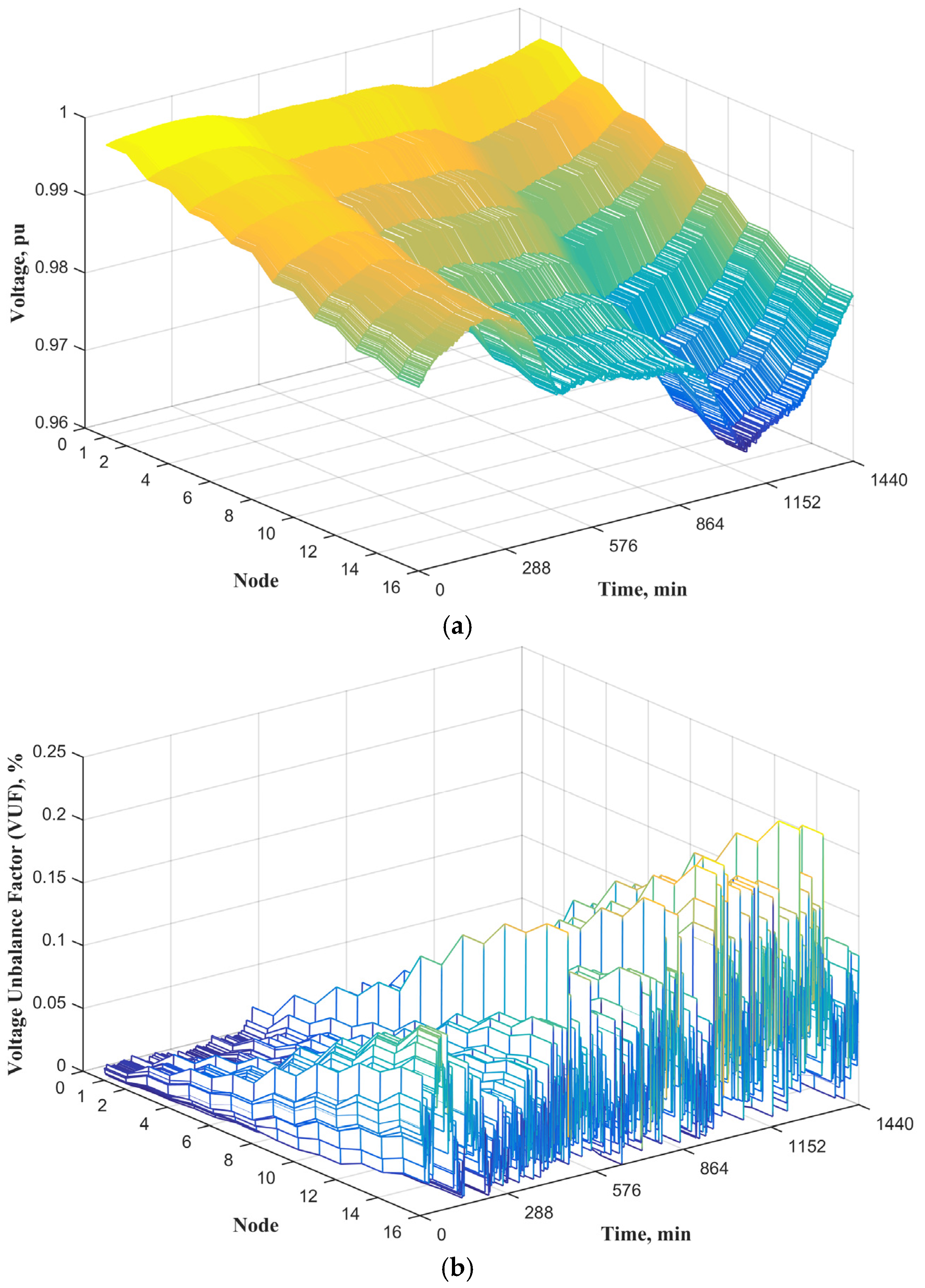
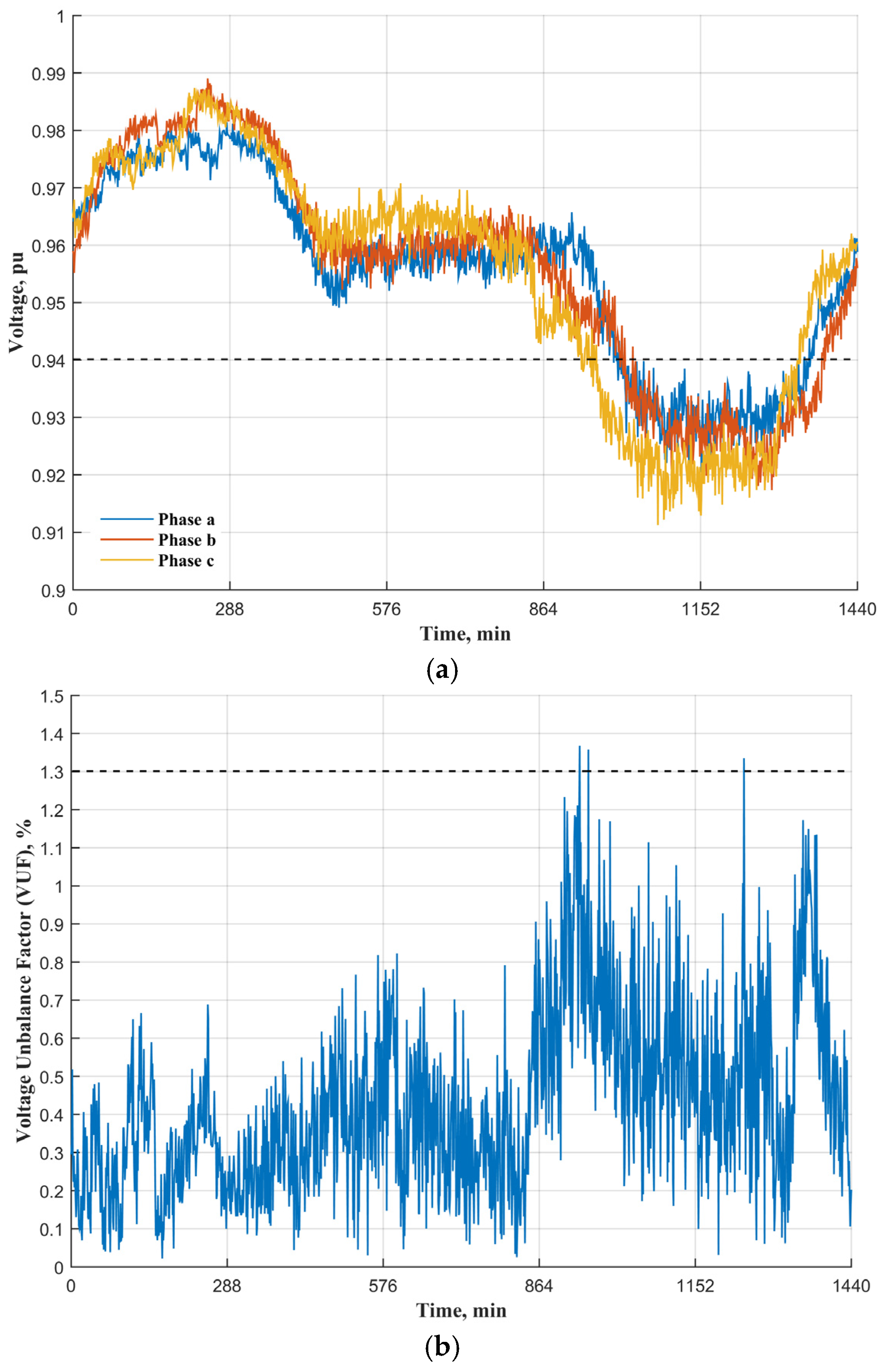
- Scenario I (without smart allocation): 384 EVs at the distribution transformer T8 were charged, as modeled in Section 4.3.
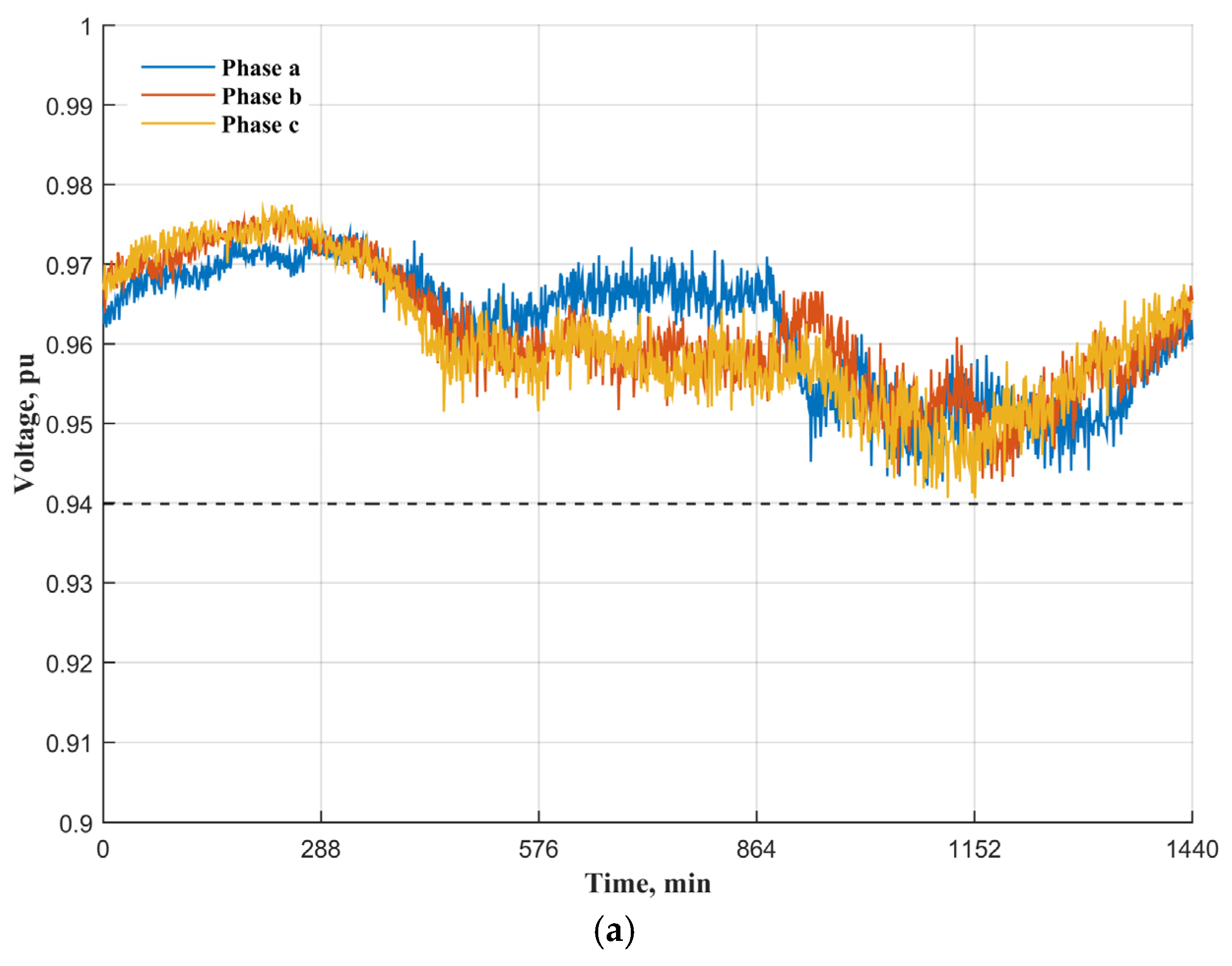
- Scenario II (with smart allocation): 384 EVs at T8 were charged with the centralized control algorithm. Equations (1)–(3), (12), (16)–(18), and (20) were used to model the considered network in a spreadsheet using Microsoft Excel. Equations (4)–(7) were used to assign the constraints of the solver used in Excel. Then, the objective function was solved using “GRG Nonlinear” in a matter of seconds. Simulation results were performed using an Intel® Core™ i7-4500U CPU, 1.80 GHz, 8.00 GB installed RAM laptop (LenovoTM, Hook, UK), operating with Microsoft Windows 10 Pro (Microsoft Corporation, Reading, UK, 2015). 64-bit operating system. MATLAB R2015a (R2015a, MathWorks, Cambridge, UK, 2015) was used to write the code for solving unbalanced power flow equations. Results were computed and visualized with a single MATLAB-script file in less than one minute. The constraints of the studied system were assigned according to the policy regulation for UK distribution networks as presented in the following subsections.
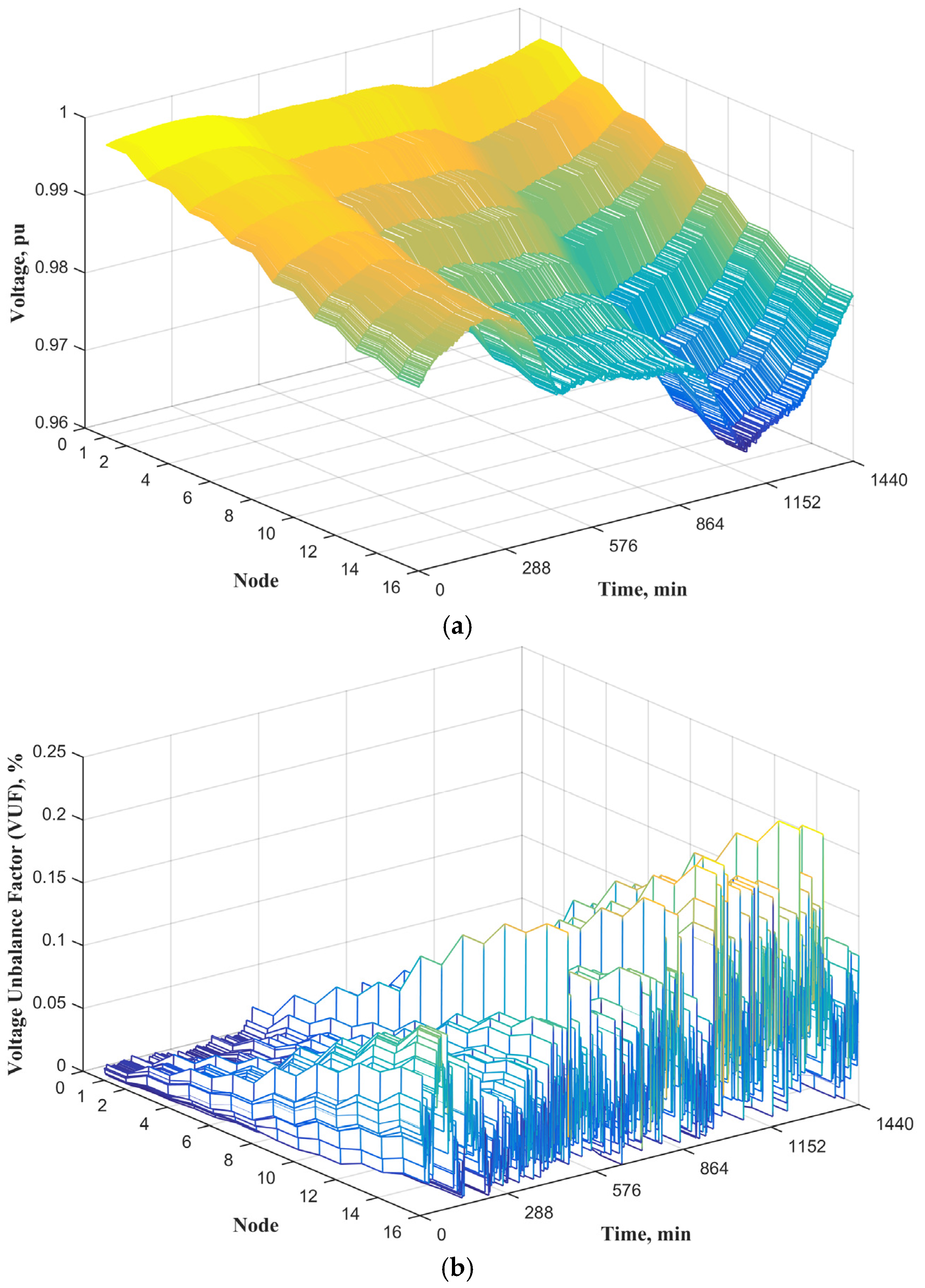
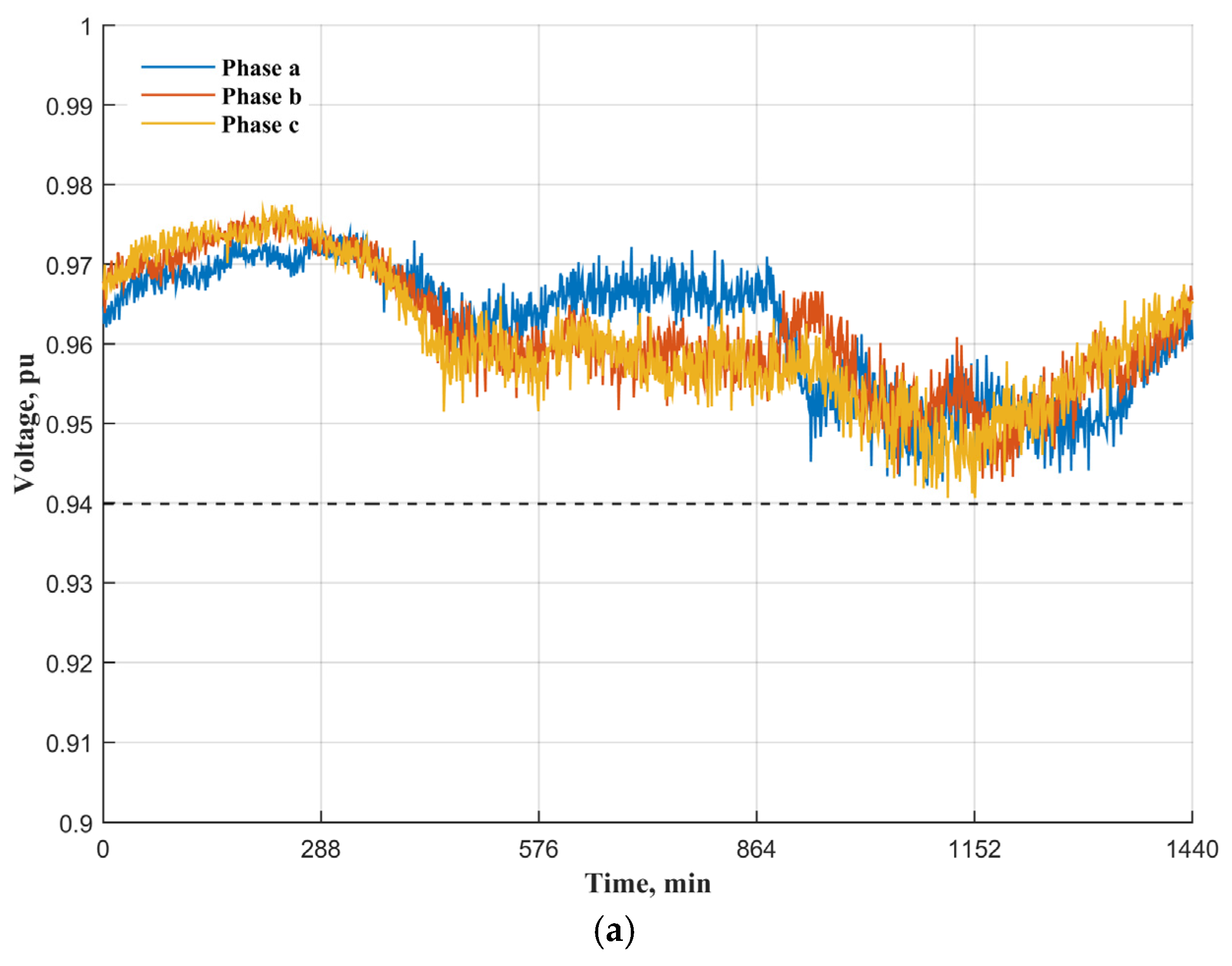
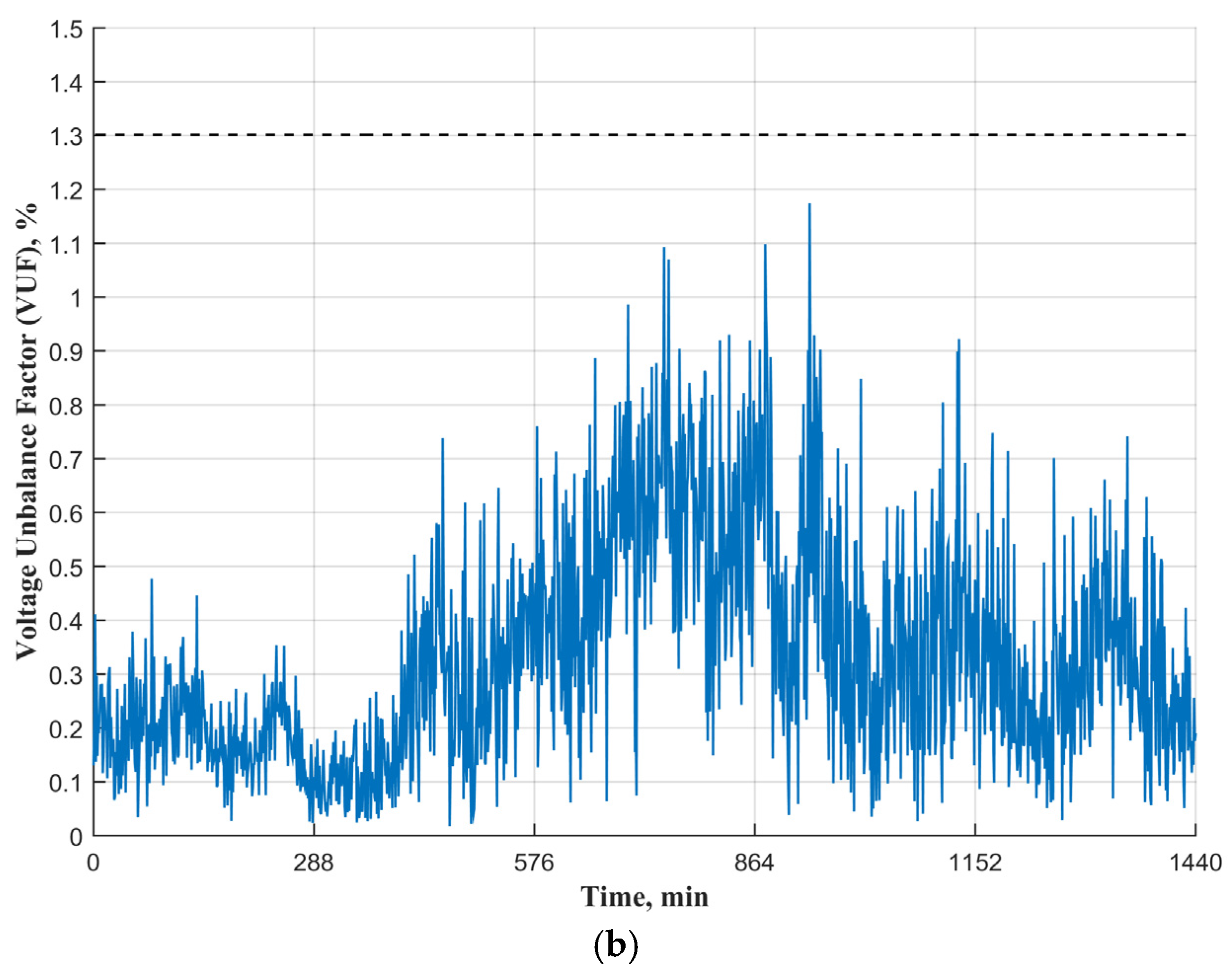
5.1. Voltage Magnitudes and Voltage Unbalances
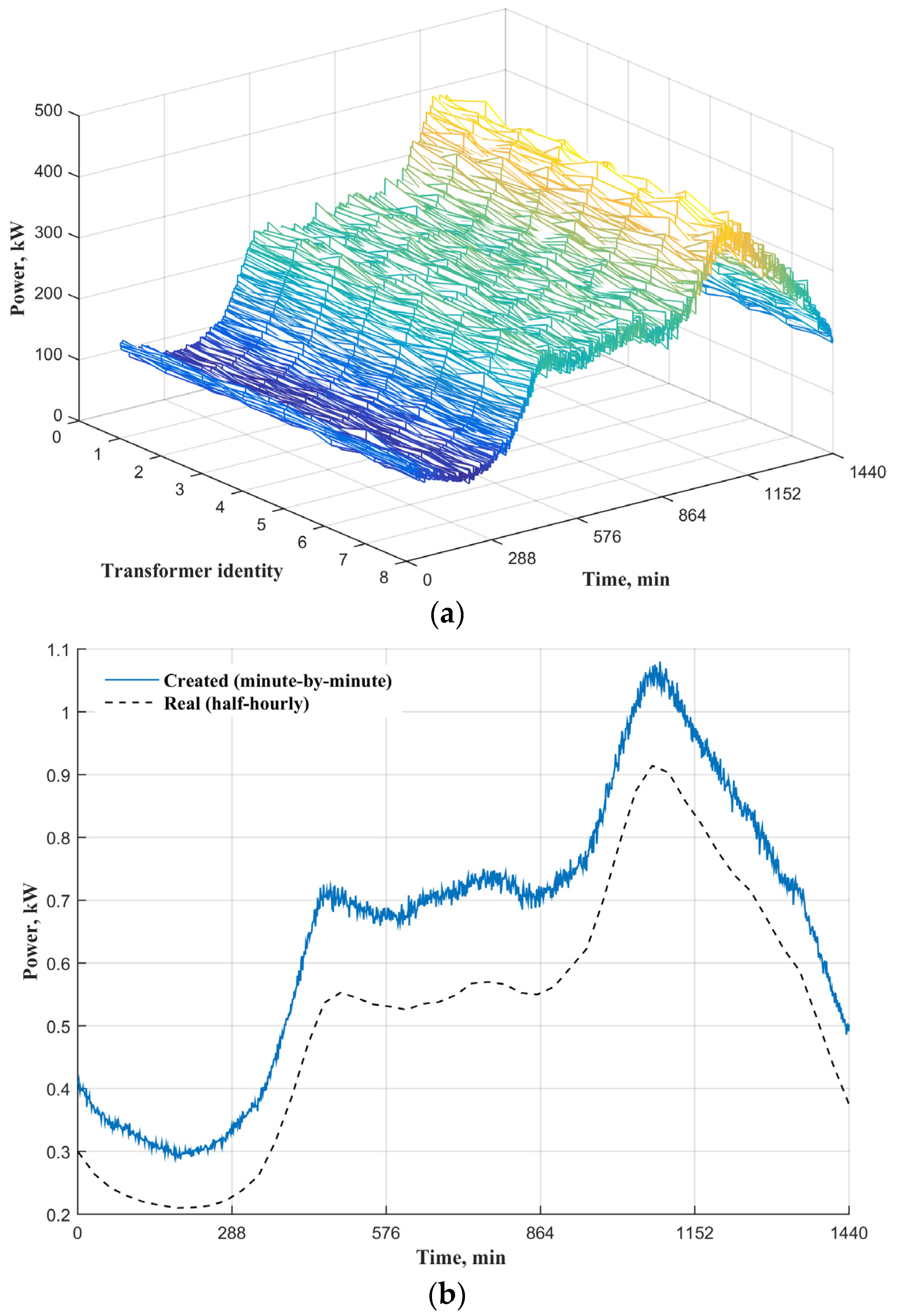
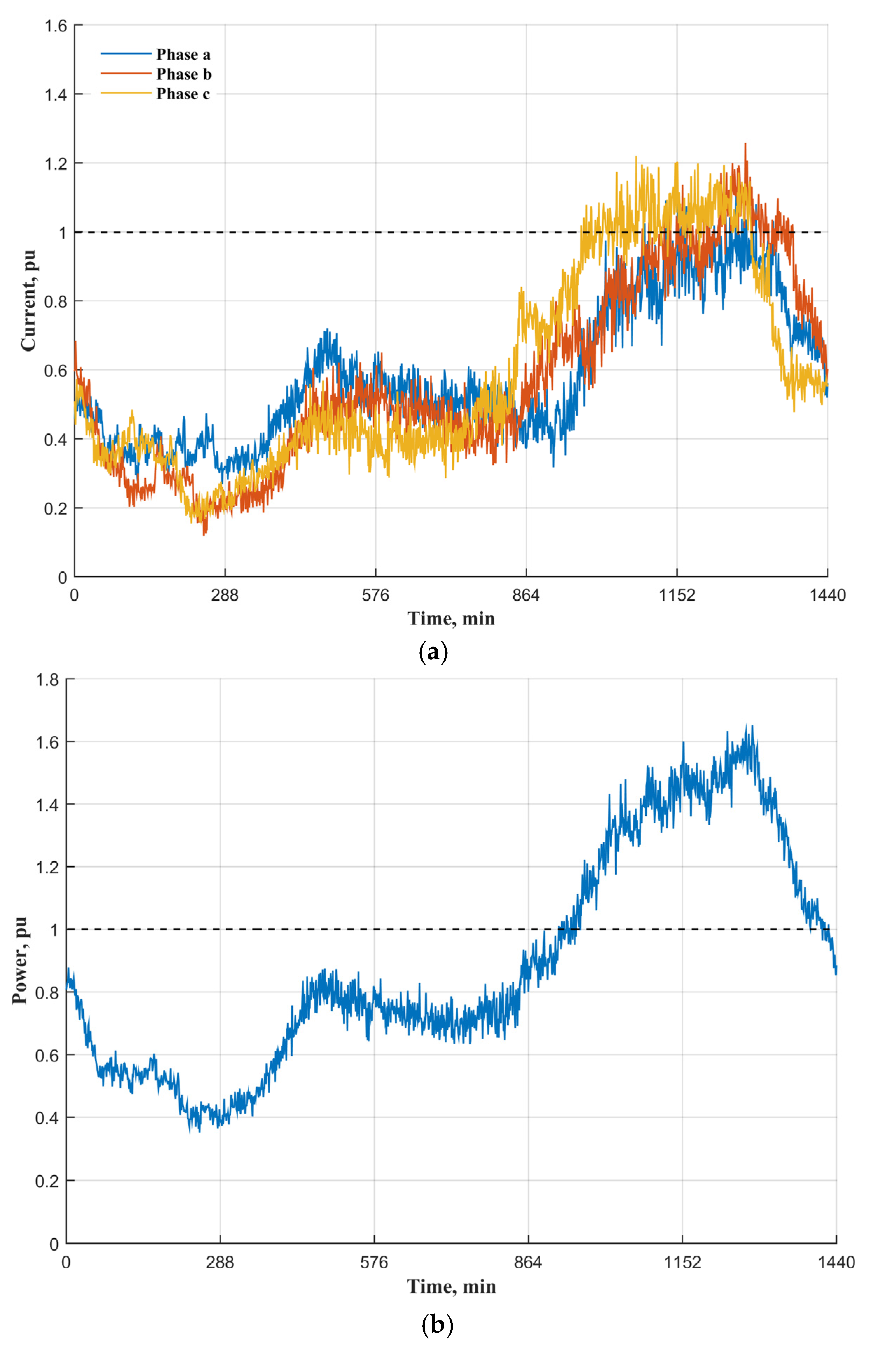
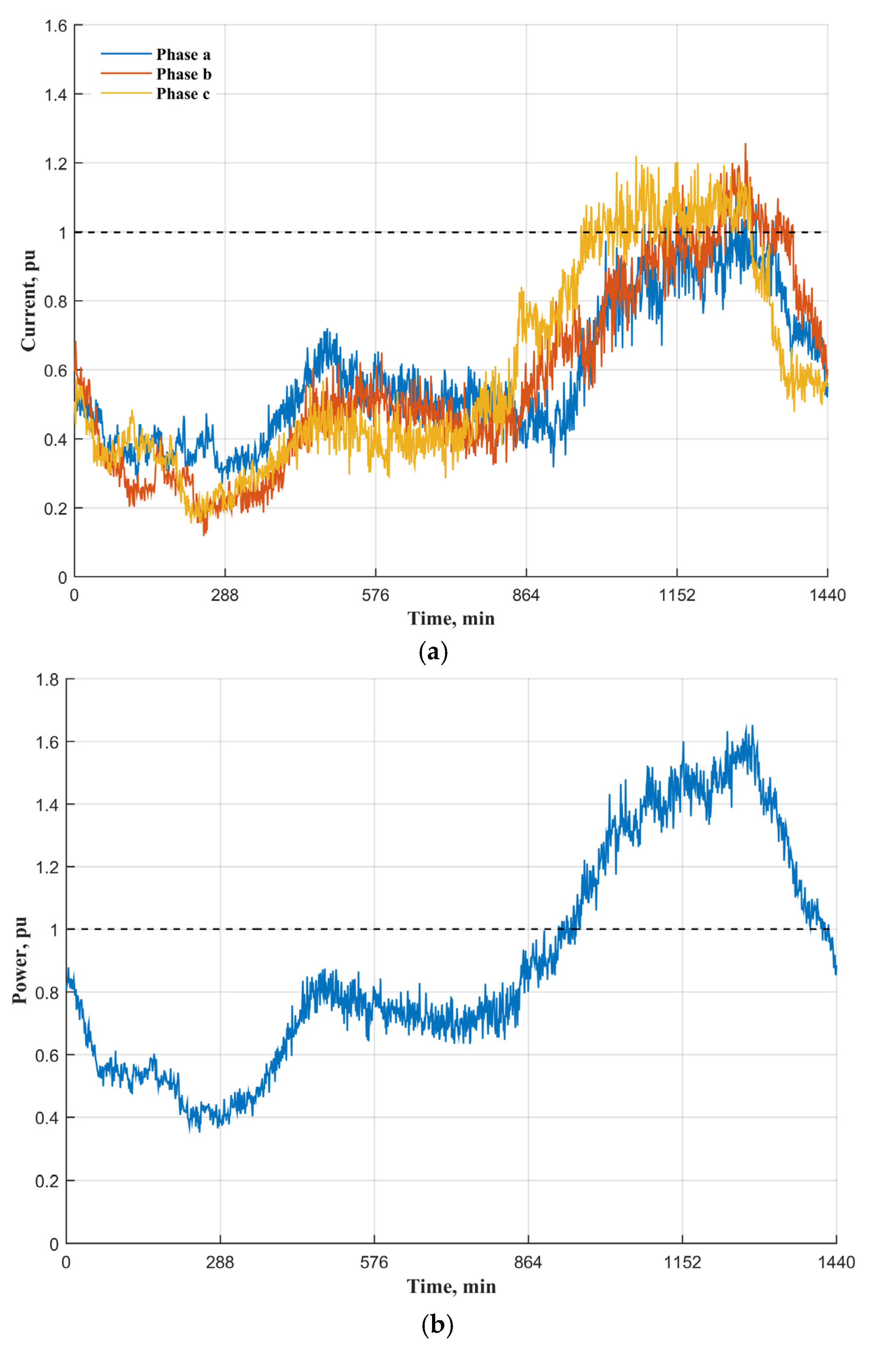
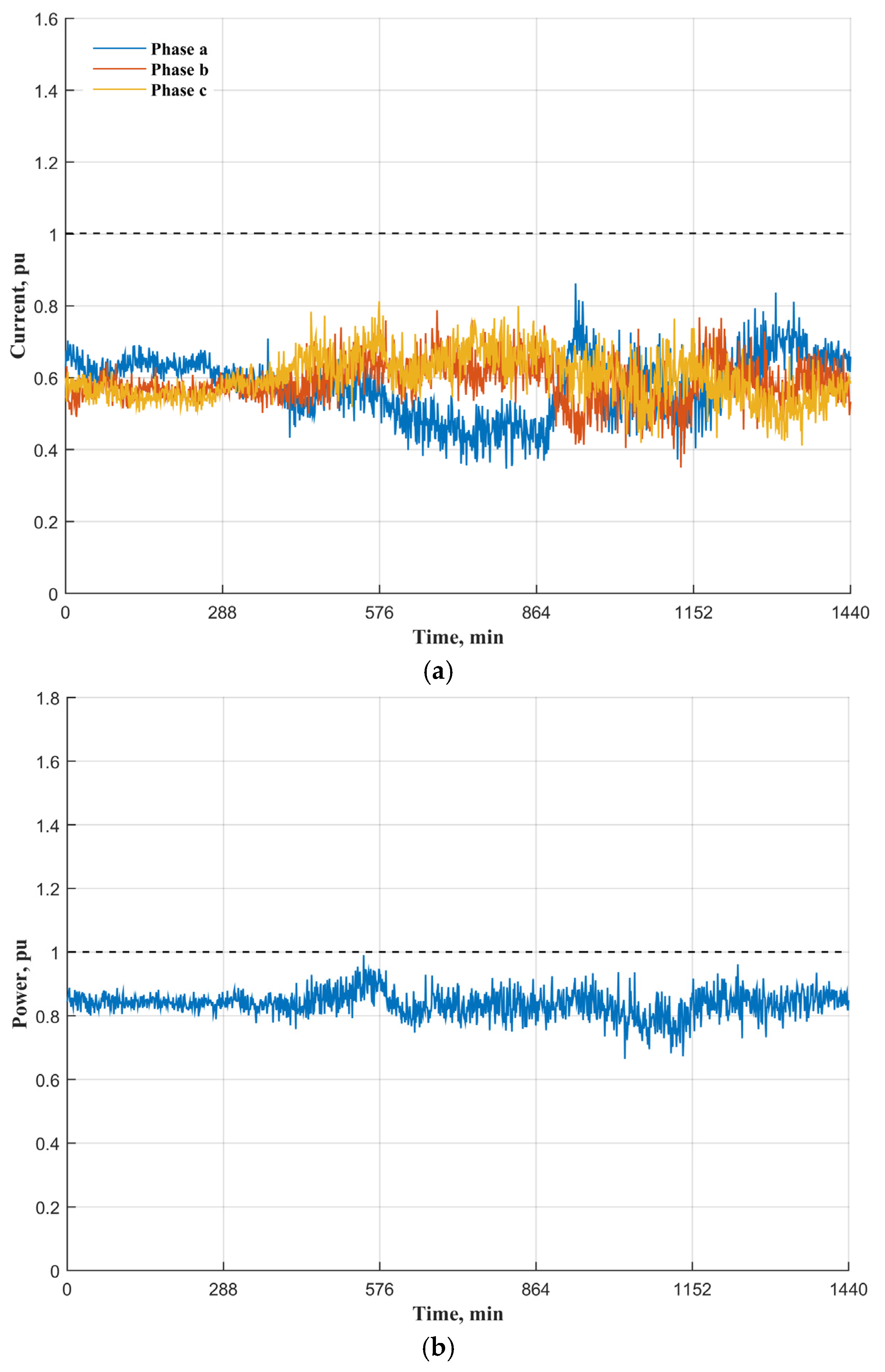
5.2. Limitations of Network Components
6. Conclusions
- Deviating from the normal value of voltage magnitude and voltage unbalance.
- Overloading the main distribution line and the distribution transformer.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Element Energy. Pathways to high penetration of electric vehicles; Element Energy Limited: Cambridge, UK, 2013. [Google Scholar]
- Element Energy. Further Analysis of Data from the Household Electricity Usage Study: Correlation of Consumption with Low Carbon Technologies; Element Energy Limited: Cambridge, UK, 2014. [Google Scholar]
- Gonzalez Vaya, M.; Galus, M.D.; Waraich, R.A.; Andersson, G. On the Interdependence of Intelligent Charging Approaches for Plug-in Electric Vehicles in Transmission and Distribution Networks. In Proceedings of the 2012 3rd IEEE PES Innovation Smart Grid Technologies Europe (ISGT Europe), Berlin, Germany, 14–17 October 2012; pp. 1–8.
- Mu, Y.; Wu, J.; Jenkins, N.; Jia, H.; Wang, C. A Spatial—Temporal model for grid impact analysis of plug-in electric vehicles. Appl. Energy 2014, 114, 456–465. [Google Scholar] [CrossRef]
- Neaimeh, M.; Wardle, R.; Jenkins, A.M.; Yi, J.; Hill, G.; Lyons, P.F.; Hübner, Y.; Blythe, P.T.; Taylor, P.C. A probabilistic approach to combining smart meter and electric vehicle charging data to investigate distribution network impacts. Appl. Energy. in press.
- Xiong, J.; Wu, D.; Zeng, H.; Liu, S.; Wang, X. Impact Assessment of Electric Vehicle Charging on Hydro Ottawa Distribution Networks at Neighborhood Levels. In Proceedings of the IEEE 28th Canadian Conference on Electrical and Computer Engineering, Halifax, NS, Canada, 3–6 May 2015; pp. 1072–1077.
- Papadopoulos, P.; Skarvelis-Kazakos, S.; Grau, I.; Cipcigan, L.M.; Jenkins, N. Electric vehicles’ impact on British distribution networks. IET Transp. Electr. Syst. 2011, 2, 91–102. [Google Scholar] [CrossRef]
- Qian, K.; Zhou, C.; Yuan, Y. Electrical Power and Energy Systems Impacts of high penetration level of fully electric vehicles charging loads on the thermal ageing of power transformers. Int. J. Electr. Power Energy Syst. 2015, 65, 102–112. [Google Scholar] [CrossRef]
- Abdelsamad, S.F.; Morsi, W.G.; Sidhu, T.S. Probabilistic Impact of Transportation Electrification on the Loss-of-Life of Distribution Transformers in the Presence of Rooftop Solar Photovoltaic. IEEE Trans. Sustain. Energy 2015, 6, 1565–1573. [Google Scholar] [CrossRef]
- Fernández, L.P.; Gómez, T.; Román, S.; Cossent, R.; Domingo, C.M.; Frías, P. Assessment of the Impact of Plug-in Electric Vehicles on Distribution Networks. IEEE Trans. Power Sytems. 2011, 26, 206–213. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, C.; Yuan, J. Hybrid Energy Scheduling in a Renewable Micro Grid. Appl. Sci. 2015, 5, 516–531. [Google Scholar] [CrossRef]
- Honarmand, M.; Zakariazadeh, A.; Jadid, S. Self-scheduling of electric vehicles in an intelligent parking lot using stochastic optimization. J. Franklin Inst. 2014, 352, 449–467. [Google Scholar] [CrossRef]
- Zakariazadeh, A.; Jadid, S.; Siano, P. Multi-objective scheduling of electric vehicles in smart distribution system. Energy Convers. Manag. 2014, 79, 43–53. [Google Scholar] [CrossRef]
- Ortega-vazquez, M.A. Optimal scheduling of electric vehicle charging and vehicle-to-grid services at household level including battery degradation and price uncertainty. IET Gener. Transm. Distrib. 2014, 8, 1007–1016. [Google Scholar] [CrossRef]
- Papadopoulos, P.; Jenkins, N.; Cipcigan, L.M.; Grau, I.; Zabala, E. Coordination of the charging of electric vehicles using a multi-agent system. IEEE Trans. Smart Grid 2013, 4, 1802–1809. [Google Scholar] [CrossRef]
- Hua, L.; Wang, J.; Zhou, C. Adaptive electric vehicle charging coordination on distribution network. IEEE Trans. Smart Grid 2014, 5, 2666–2675. [Google Scholar]
- Deilami, S.; Masoum, A.S.; Moses, P.S.; Masoum, M.A.S. Real-time coordination of plug-in electric vehicle charging in smart grids to minimize power losses and improve voltage profile. IEEE Trans. Smart Grid 2011, 2, 456–467. [Google Scholar] [CrossRef]
- Masoum, A.S.; Deilami, S.; Abu-Siada, A.; Masoum, M.A.S. Fuzzy approach for online coordination of plug-in electric vehicle charging in smart grid. IEEE Trans. Sustain. Energy 2015, 6, 1112–1121. [Google Scholar] [CrossRef]
- De Hoog, J.; Alpcan, T.; Brazil, M.; Thomas, D.A.; Mareels, I. Optimal charging of electric vehicles taking distribution network constraints into account. IEEE Trans. Power Sytems. 2015, 30, 365–375. [Google Scholar] [CrossRef]
- Evora, J.; Hernandez, J.J.; Barbosa, D.; Nazareno, P.; Sampaio, M. Agent-based modeling for designing an EV charging distribution systems: A case study in Salvador of Bahia. In Proceedings of the European Simulation and Modelling Conference, University of Porto, Porto, Portugal, 22–24 October 2014.
- Mocci, S.; Natale, N.; Pilo, F.; Ruggeri, S. Demand side integration in LV smart grids with multi-agent control system. Electr. Power Syst. Res. 2015, 125, 23–33. [Google Scholar] [CrossRef]
- Unda, G.; Papadopoulos, P.; Skarvelis-kazakos, S.; Cipcigan, L.M.; Jenkins, N.; Zabala, E. Management of electric vehicle battery charging in distribution networks with multi-agent systems. Electr. Power Syst. Res. 2014, 110, 172–179. [Google Scholar] [CrossRef]
- Yang, Z.; Li, K.; Foley, A.; Zhang, C. Optimal Scheduling Methods to Integrate Plug-in Electric Vehicles with the Power System: A Review. In Proceedings of the 19th IFAC World Congress, Cape Town, South Africa, 24–29 August 2014; pp. 8594–8603.
- Yang, Z.; Li, K.; Foley, A. Computational scheduling methods for integrating plug-in electric vehicles with power systems: A review. Renew. Sustain. Energy Rev. 2015, 51, 396–416. [Google Scholar] [CrossRef]
- Derek, S. Real-Time Mobile Communication of Power Requirements for Electric Vehicles. Technol. Innov. Manage. Rev. 2012, 2, 22–27. [Google Scholar]
- Organisation for Economic Co-operation and Development/International Energy Agency (OECD/IEA). How 2 Guide for Smart Grids in Distribution Networks Roadmap Development and Implementation; International Energy Agency: Paris, France, 2015. [Google Scholar]
- Masoum, A.S.; Deilami, S.; Moses, P.S.; Masoum, M.A.S.; Abu-Siada, A. Smart load management of plug-in electric vehicles in distribution and residential networks with charging stations for peak shaving and loss minimisation considering voltage regulation. IET Gener. Transm. Distrib. 2011, 5, 877–888. [Google Scholar] [CrossRef]
- Navarro-espinosa, A.; Ochoa, L.F. Probabilistic impact assessment of low carbon technologies in LV distribution systems. IEEE Trans. Power Sytems. in press.
- Kersting, W.H. Distribution System Modeling and Analysis; CRC Press LLC: Boca Raton, FL, USA, 2002; pp. 271–285. [Google Scholar]
- Ingram, S.; Probert, S.; Jackson, K. The Impact of Small Scale Embedded Generation on the Operating Parameters of Distribution Networks; PB Power, Department of Trade and Industry (DTI): London, UK, 2003. [Google Scholar]
- Customer-Led Led Network Revolution Project. Available online: http://www.networkrevolution.co.uk/customer-trials/ (accessed on 28 January 2016).
- Pasaoglu, G.; Fiorello, D.; Martino, A.; Scarcella, G.; Alemanno, A.; Zubaryeva, A.; Thiel, C. Driving and parking patterns of European car drivers—A mobility survey; Joint Research Centre: ZG Petten, The Netherlands, 2012. [Google Scholar]
- Department of Trade and Industry. The electricity safety, quality and continuity regulations; Stationary Office: London, UK, 2002.
- Haggis, T. Network Design Manual; E.ON Central Networks: Coventry, UK, 2006. [Google Scholar]



© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al Essa, M.J.M.; Cipcigan, L.M. Reallocating Charging Loads of Electric Vehicles in Distribution Networks. Appl. Sci. 2016, 6, 53. https://doi.org/10.3390/app6020053
Al Essa MJM, Cipcigan LM. Reallocating Charging Loads of Electric Vehicles in Distribution Networks. Applied Sciences. 2016; 6(2):53. https://doi.org/10.3390/app6020053
Chicago/Turabian StyleAl Essa, Mohammed Jasim M., and Liana M. Cipcigan. 2016. "Reallocating Charging Loads of Electric Vehicles in Distribution Networks" Applied Sciences 6, no. 2: 53. https://doi.org/10.3390/app6020053