
Benefits and Impact of Joint Metric of AOA/RSS/TOF on Indoor Localization Error

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Related Works
3. Error Bound Analysis
3.1. Metric of Single Measurement
3.1.1. Metric of RSS
3.1.2. Metric of TOF
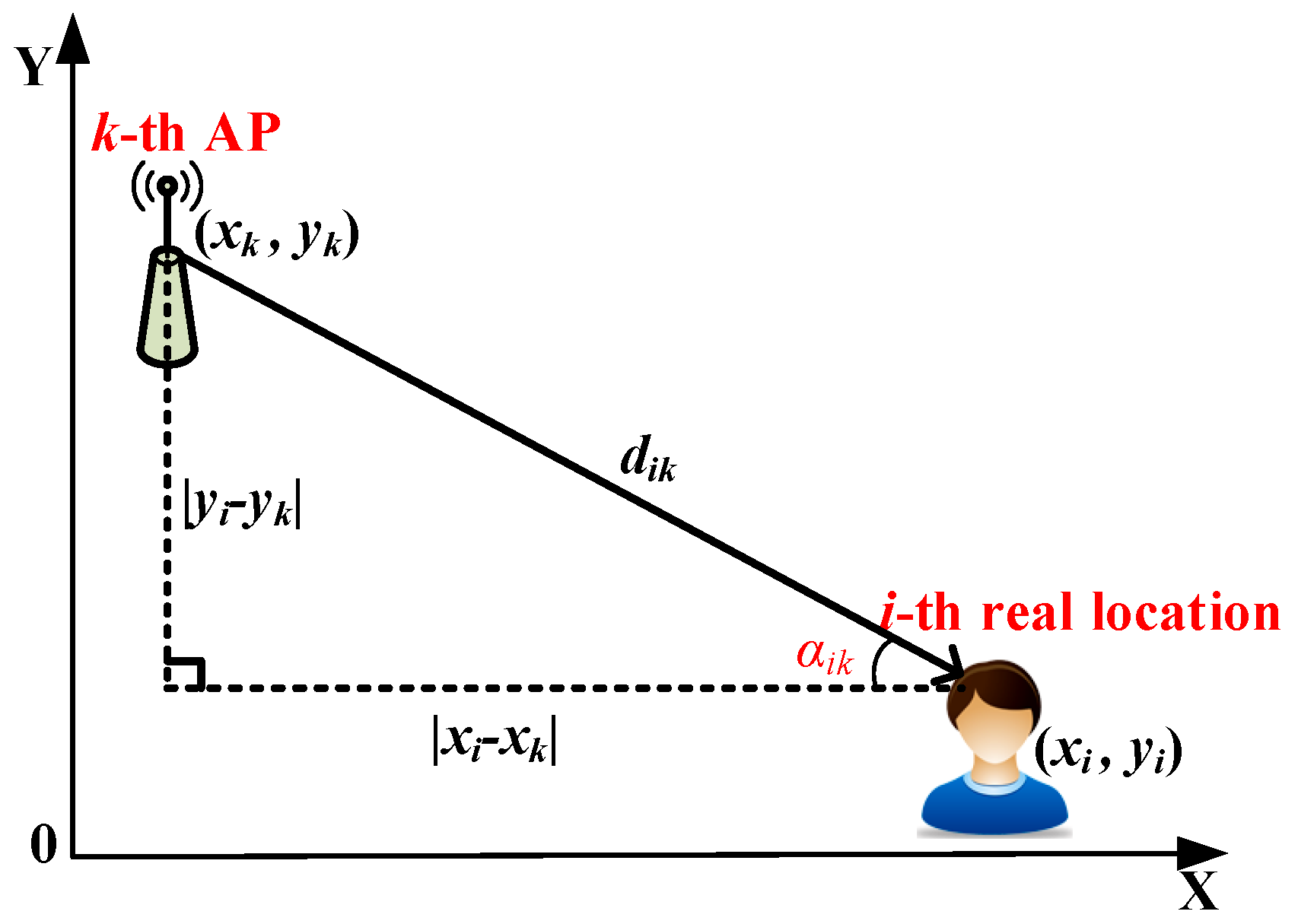
3.1.3. Metric of AOA
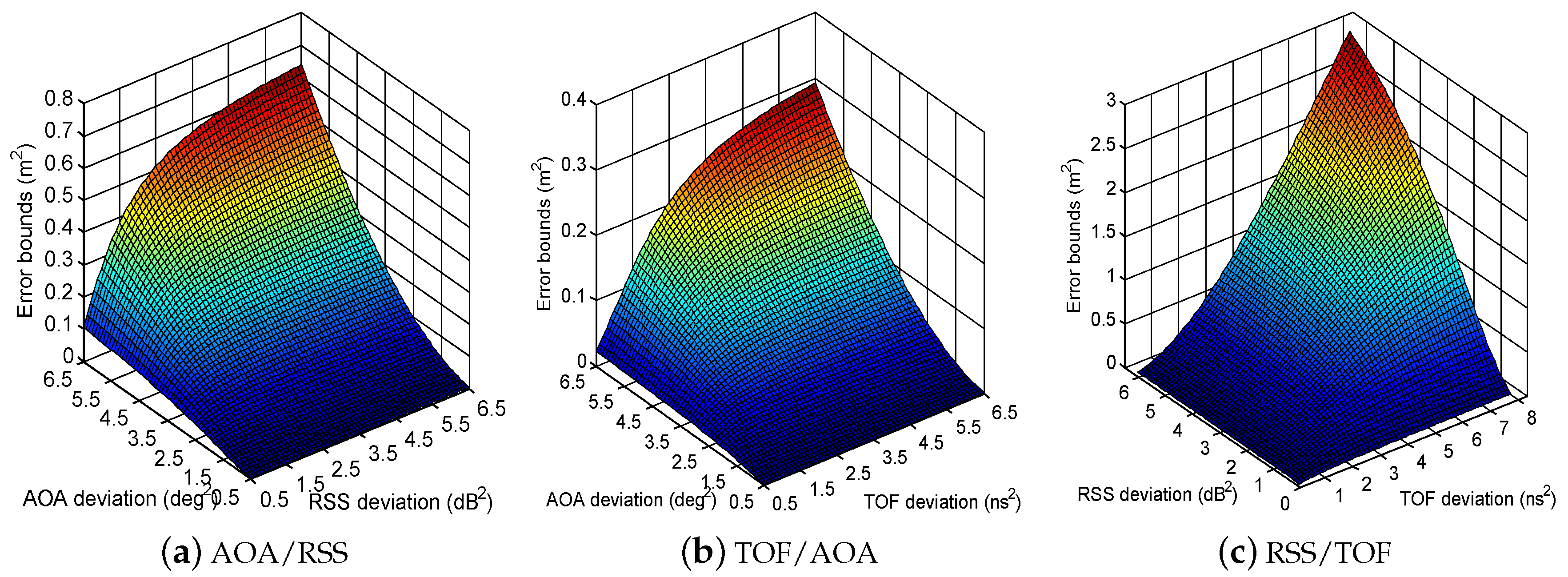
3.2. Metric of Double Measurements
3.2.1. Metric of AOA/RSS
3.2.2. Metric of RSS/TOF
3.2.3. Metric of TOF/AOA
3.3. JMART
4. Simulation Results
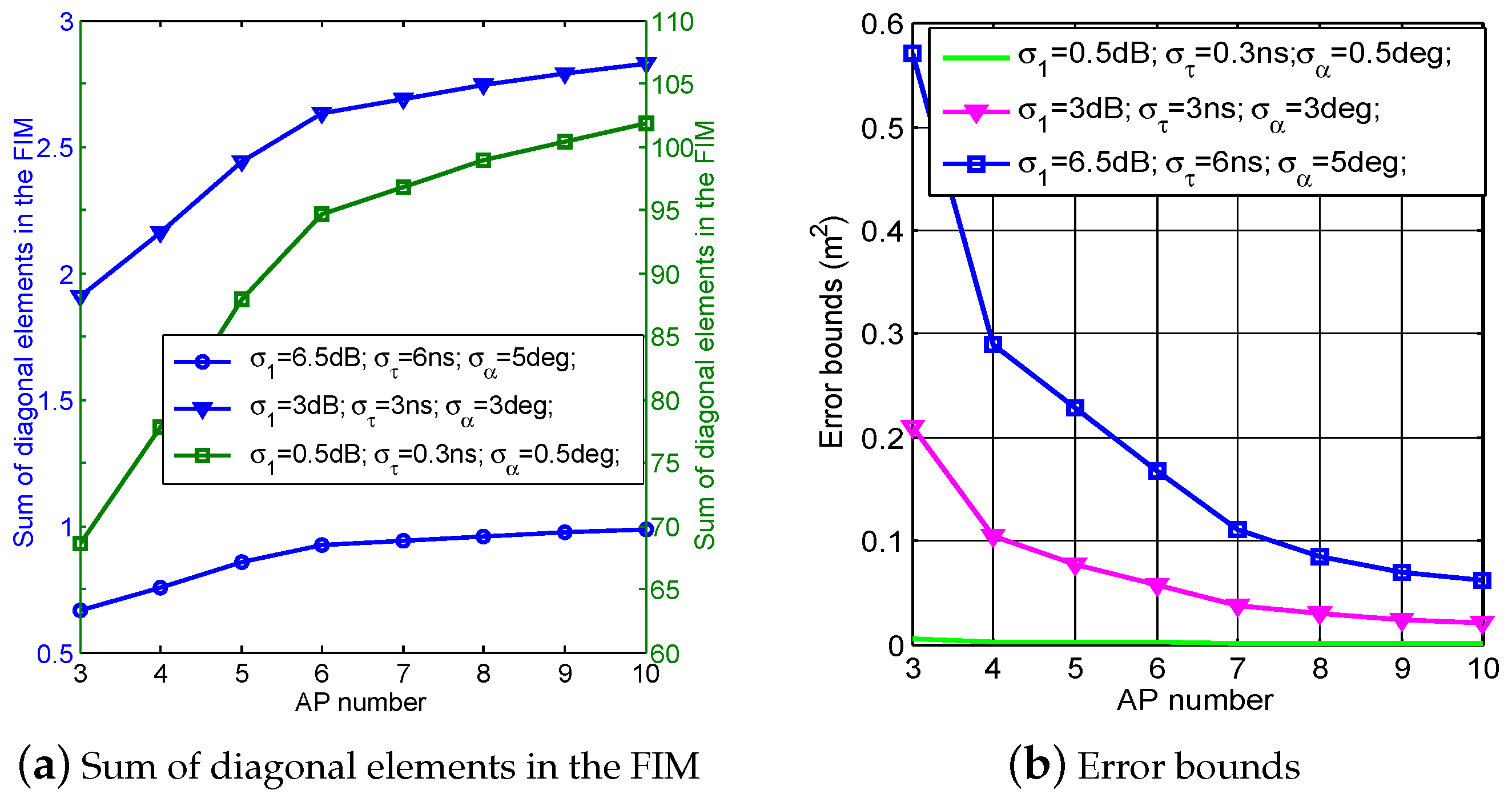
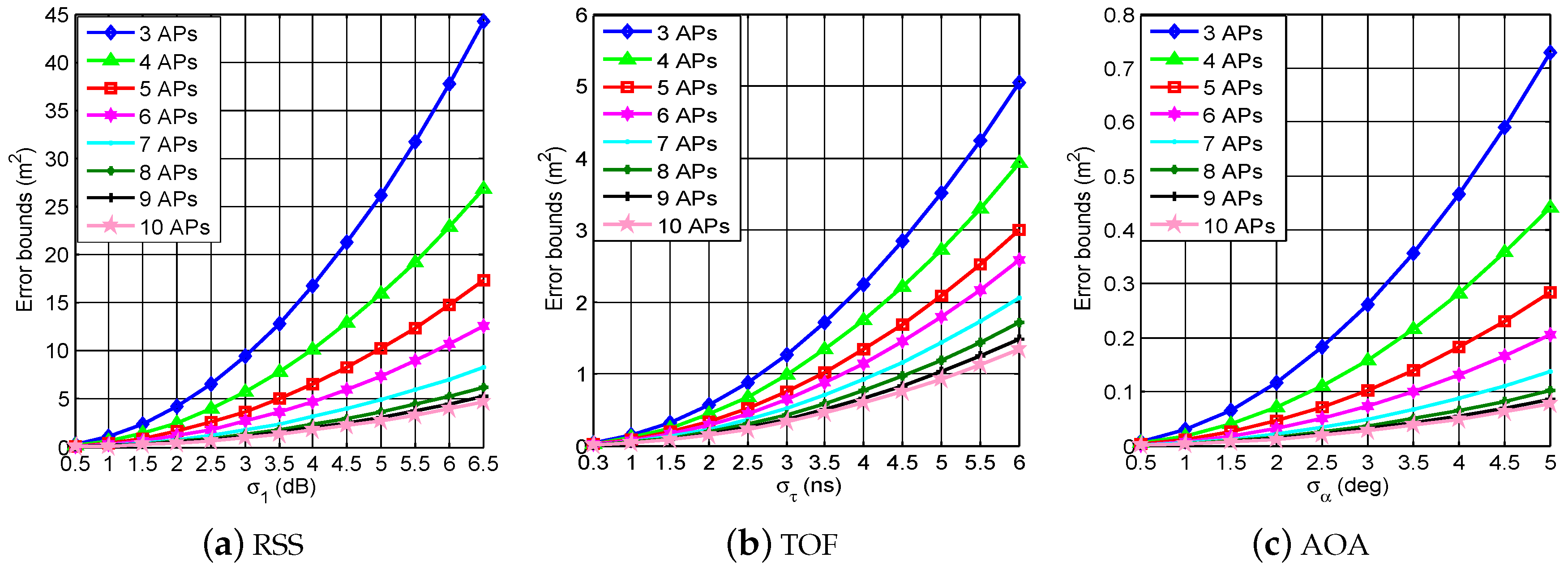
4.1. Impact of AP Number
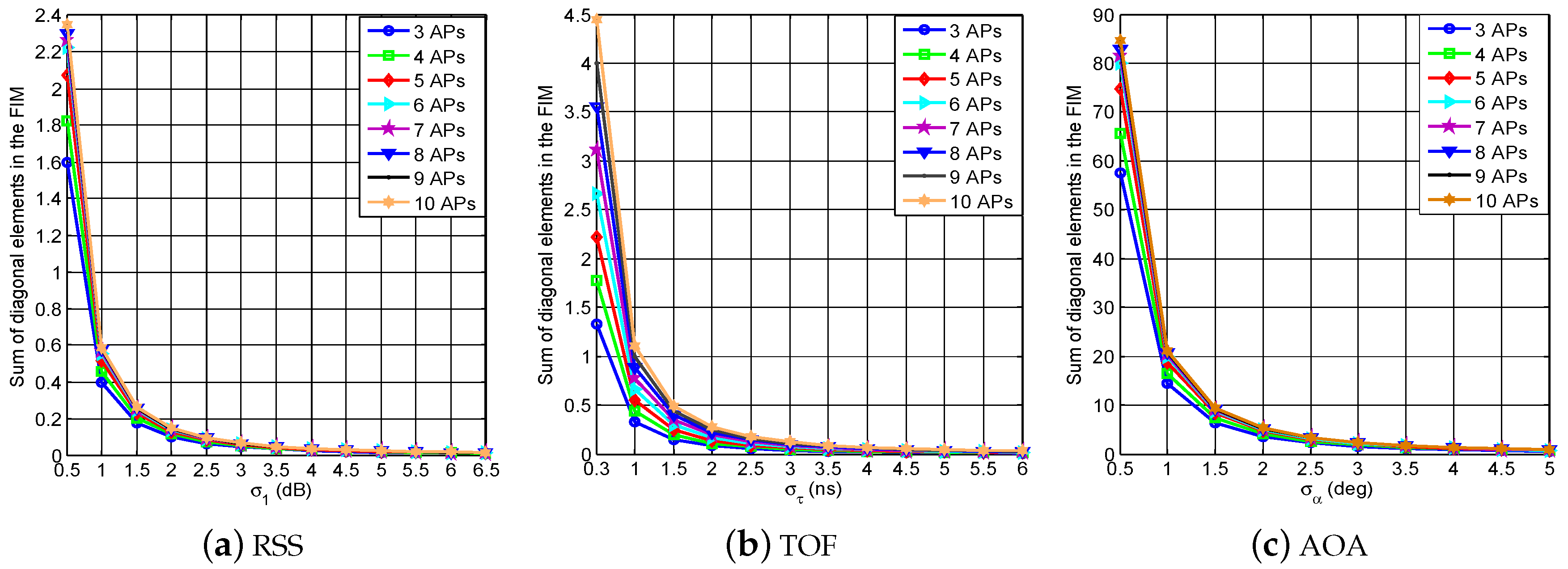
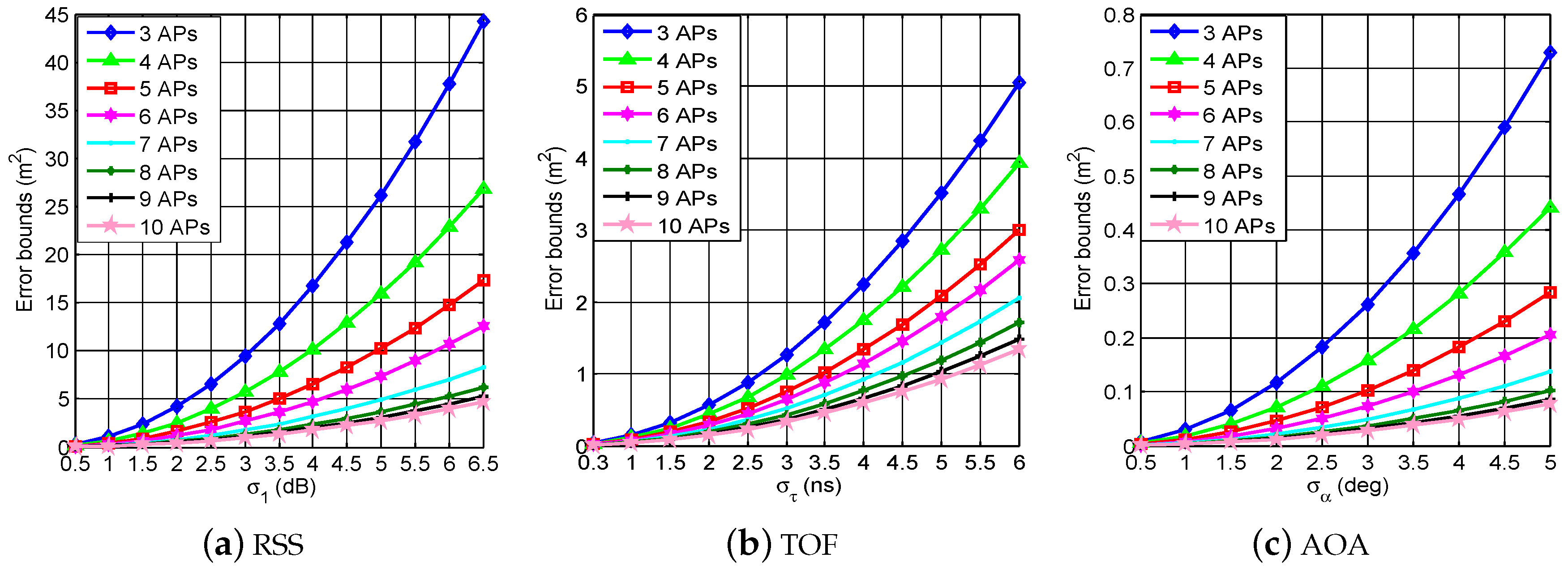
4.1.1. Performance of Metric of Single Measurement
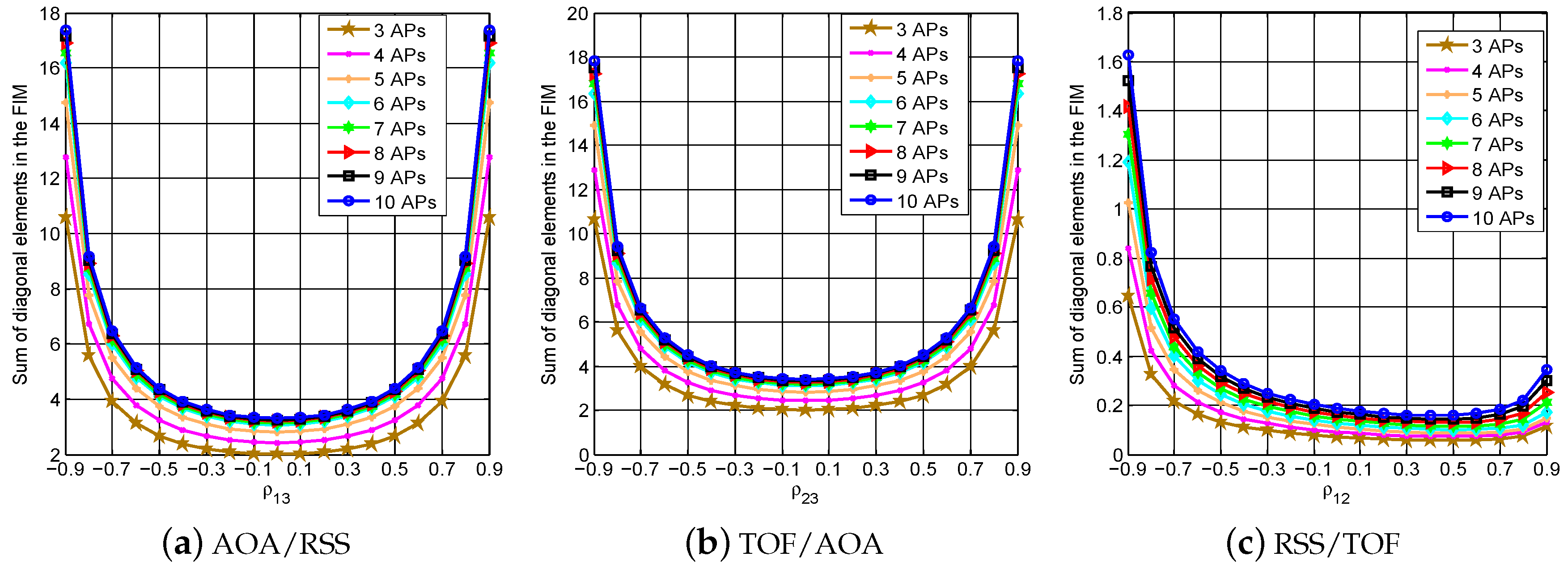
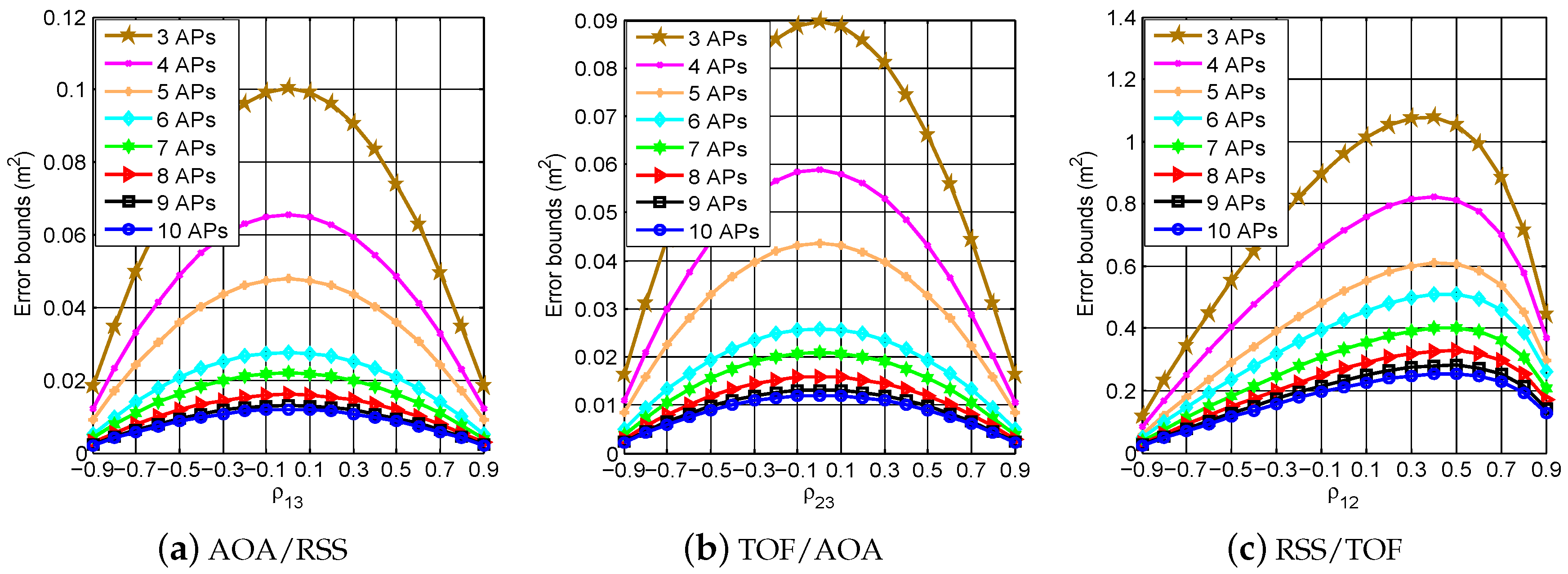
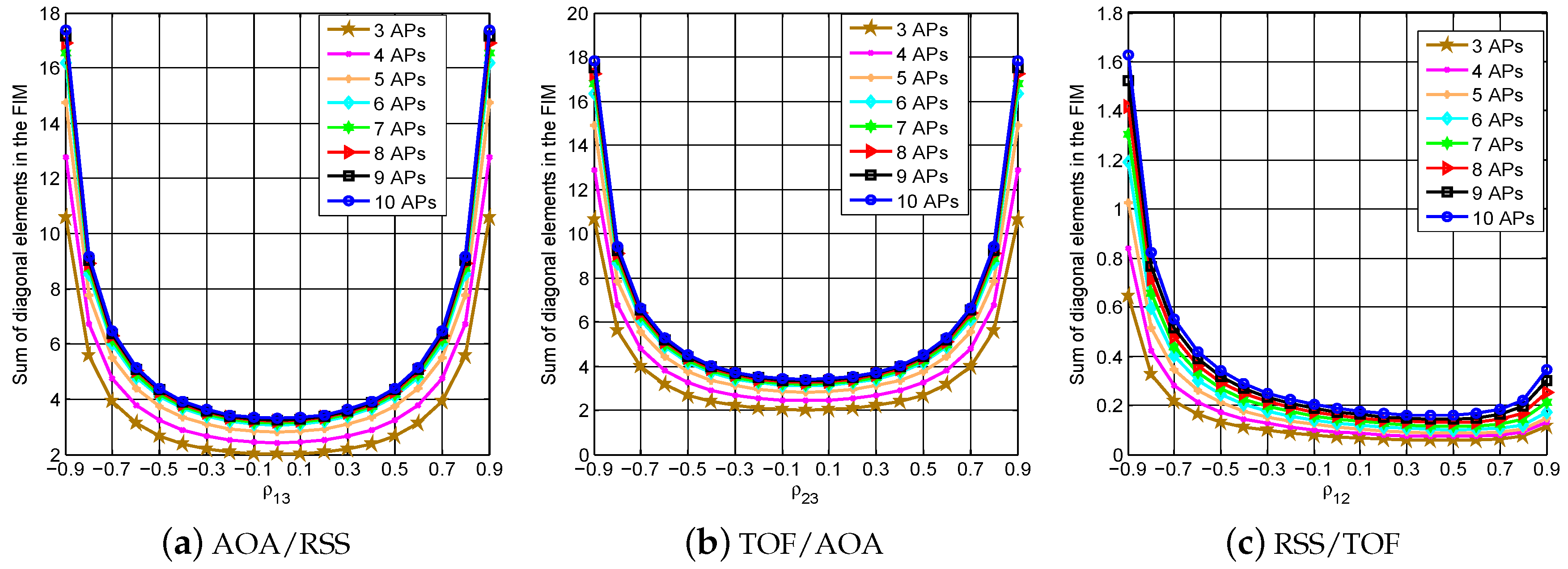
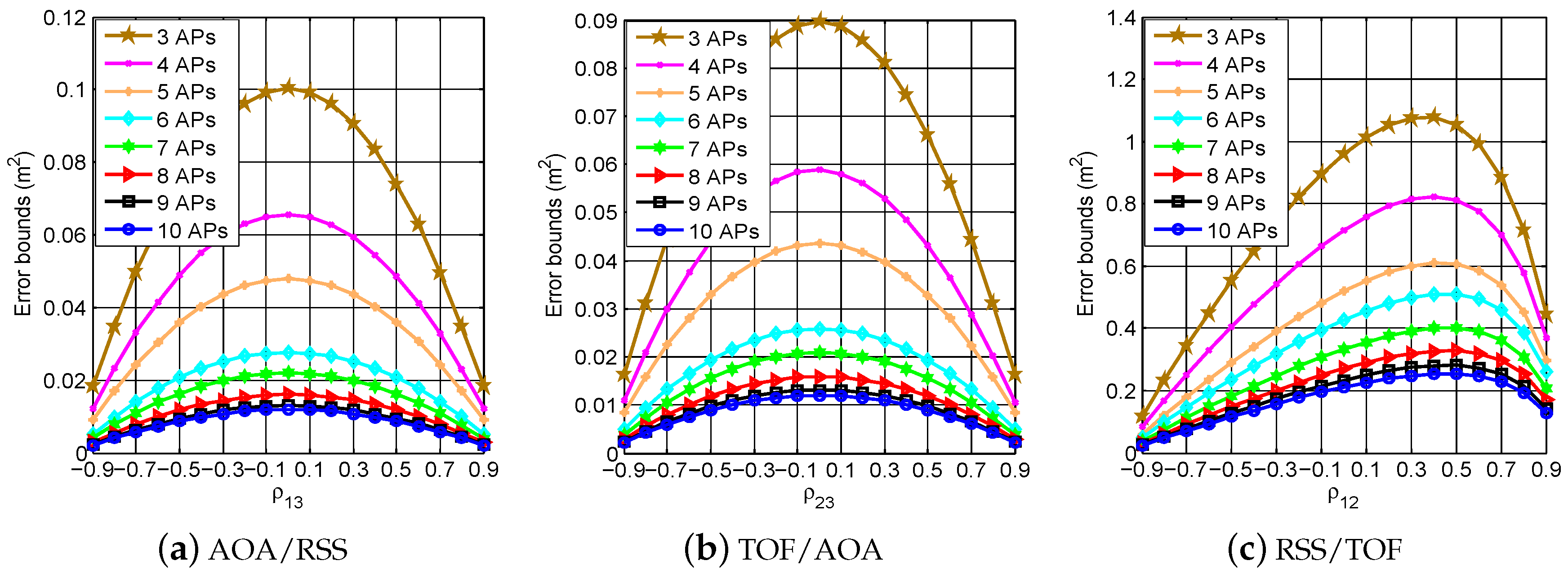
4.1.2. Performance of the Metric of Double Measurements
4.1.3. Performance of JMART
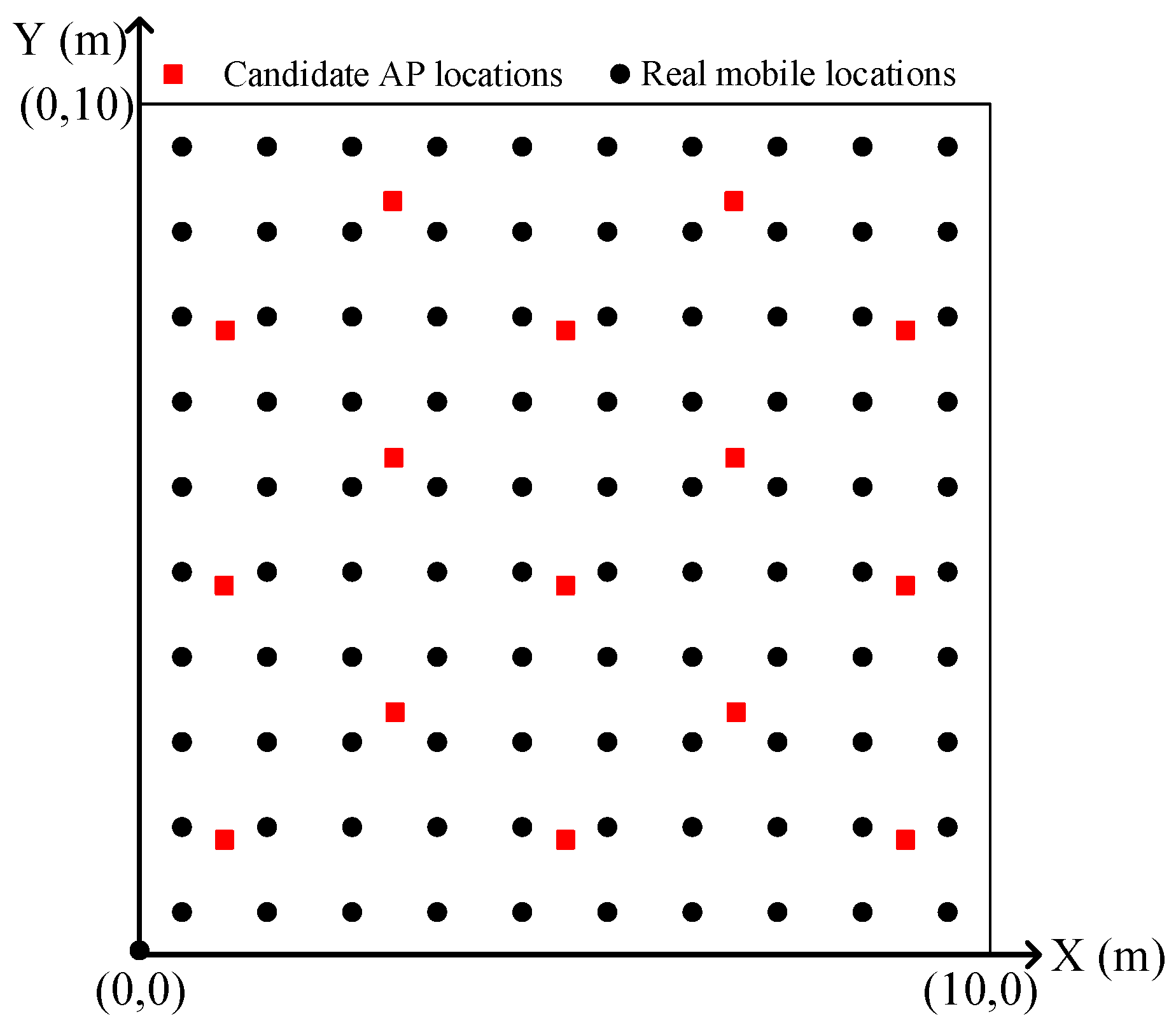
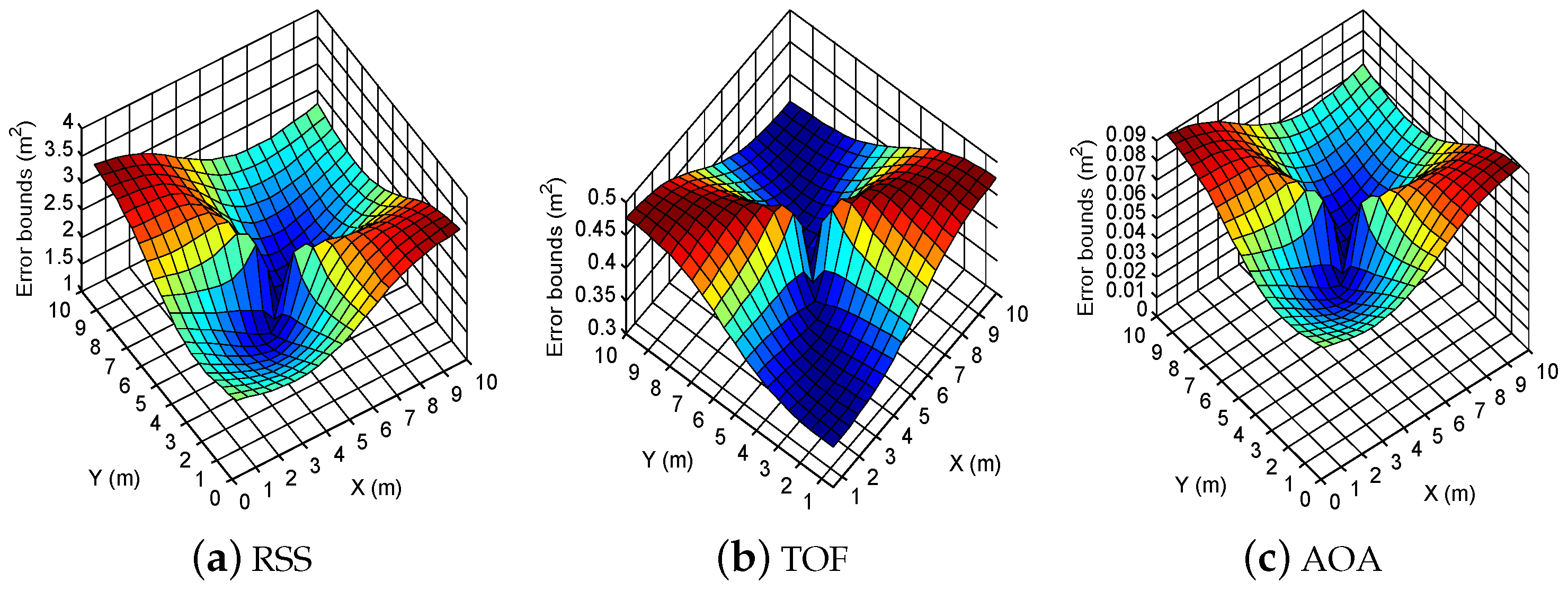
4.2. Impact of AP Locations
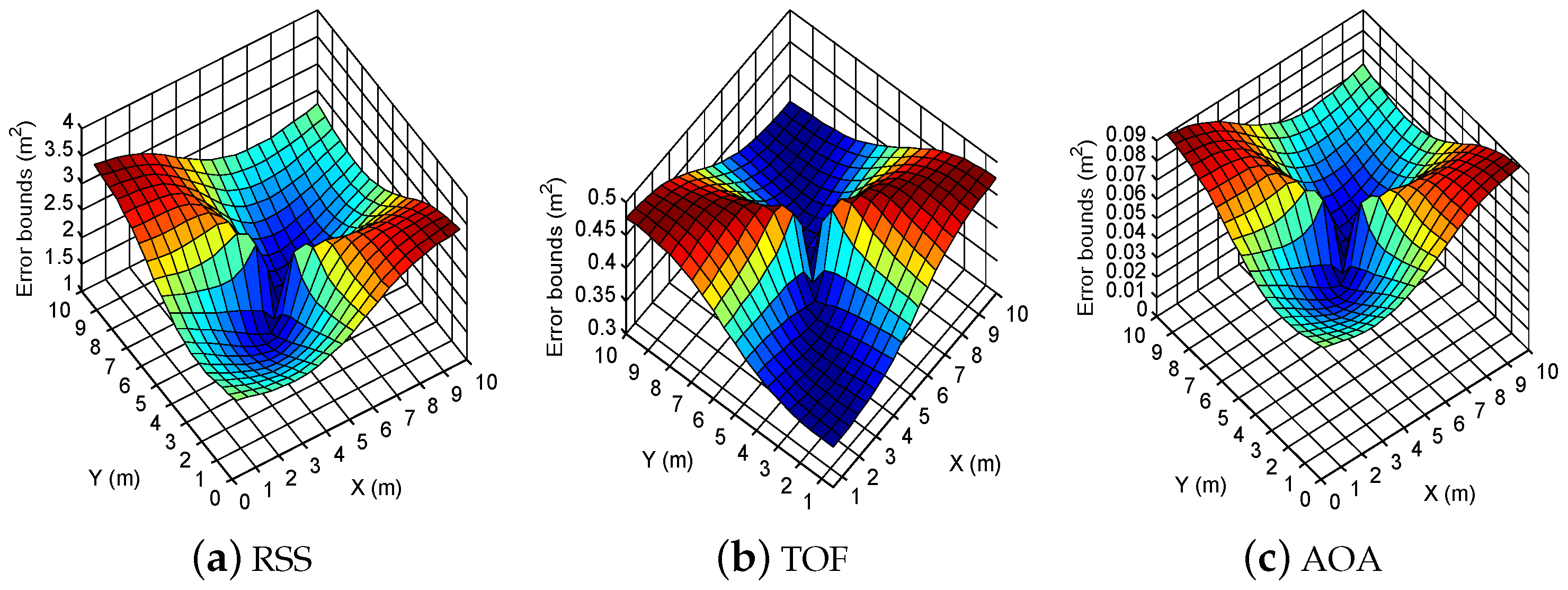
4.2.1. Performance of the Metric of Single Measurement
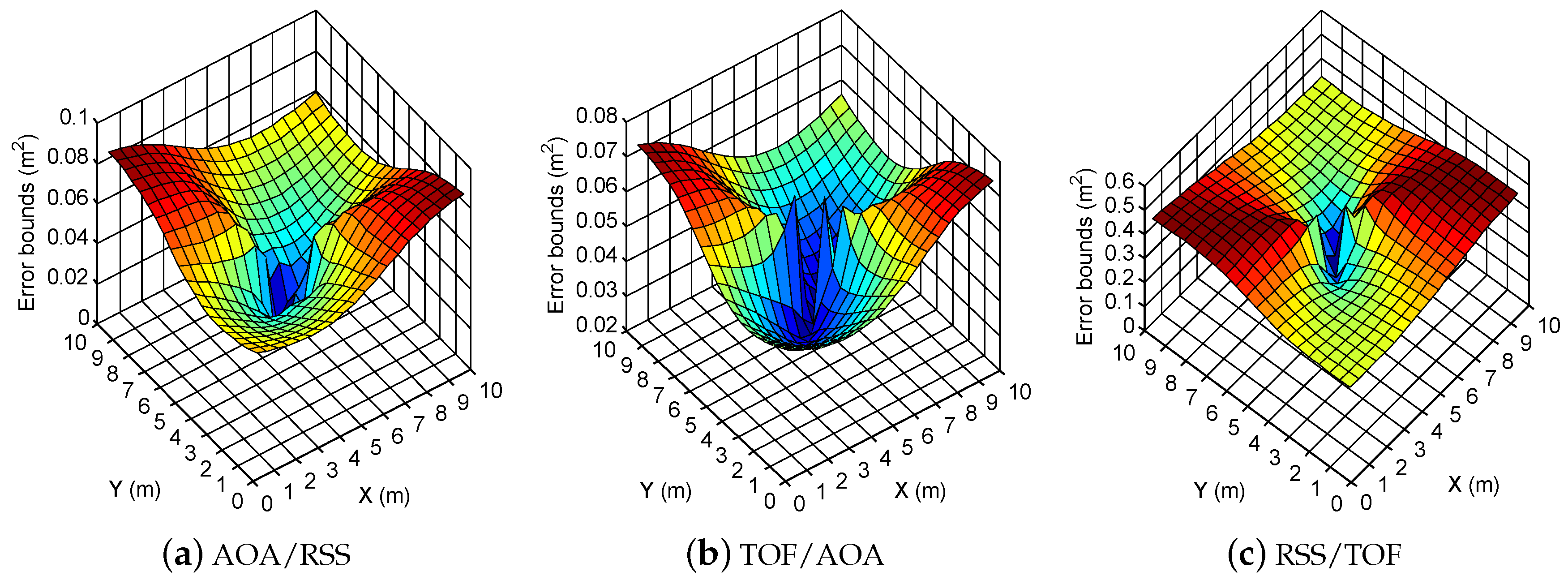
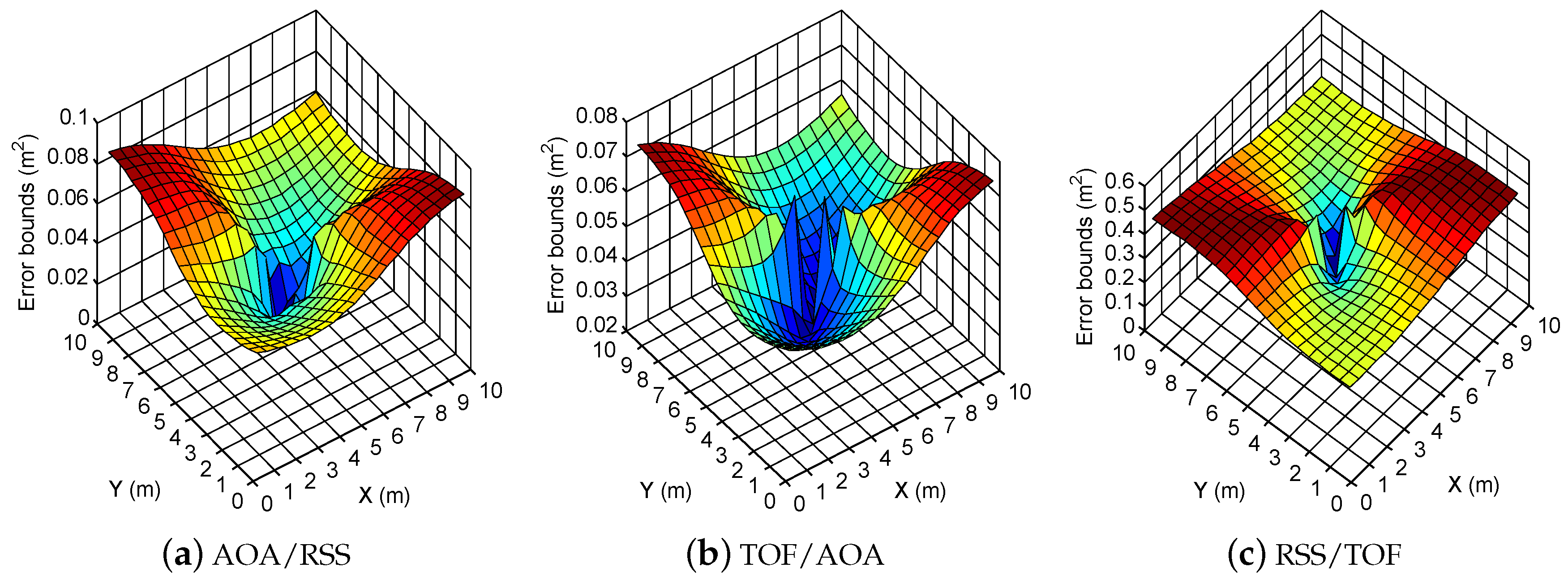
4.2.2. Performance of Metric of Double Measurements
4.2.3. Performance of JMART
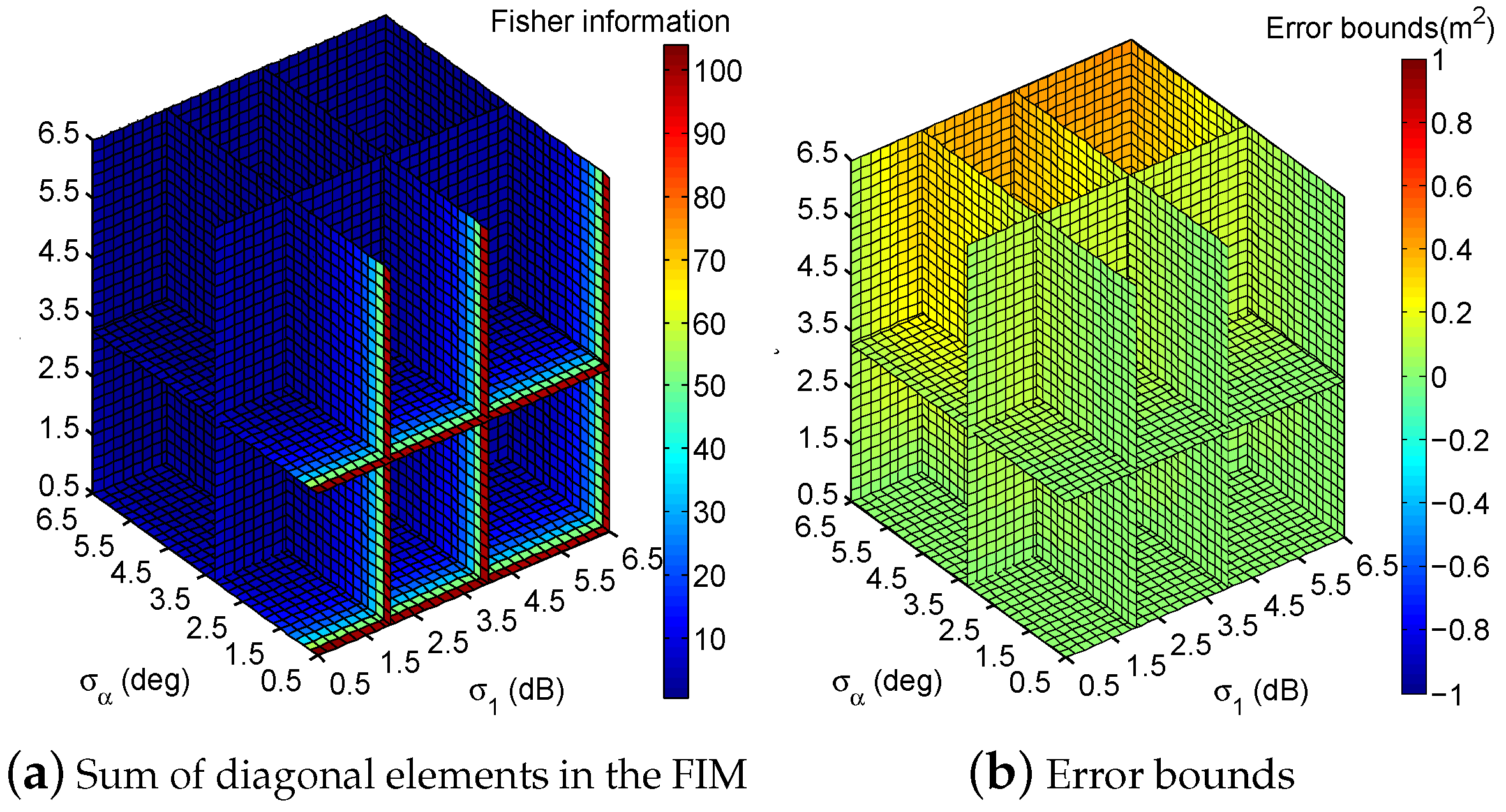
4.3. Impact of Noise Power
4.3.1. Performance of Metric of Single Measurement
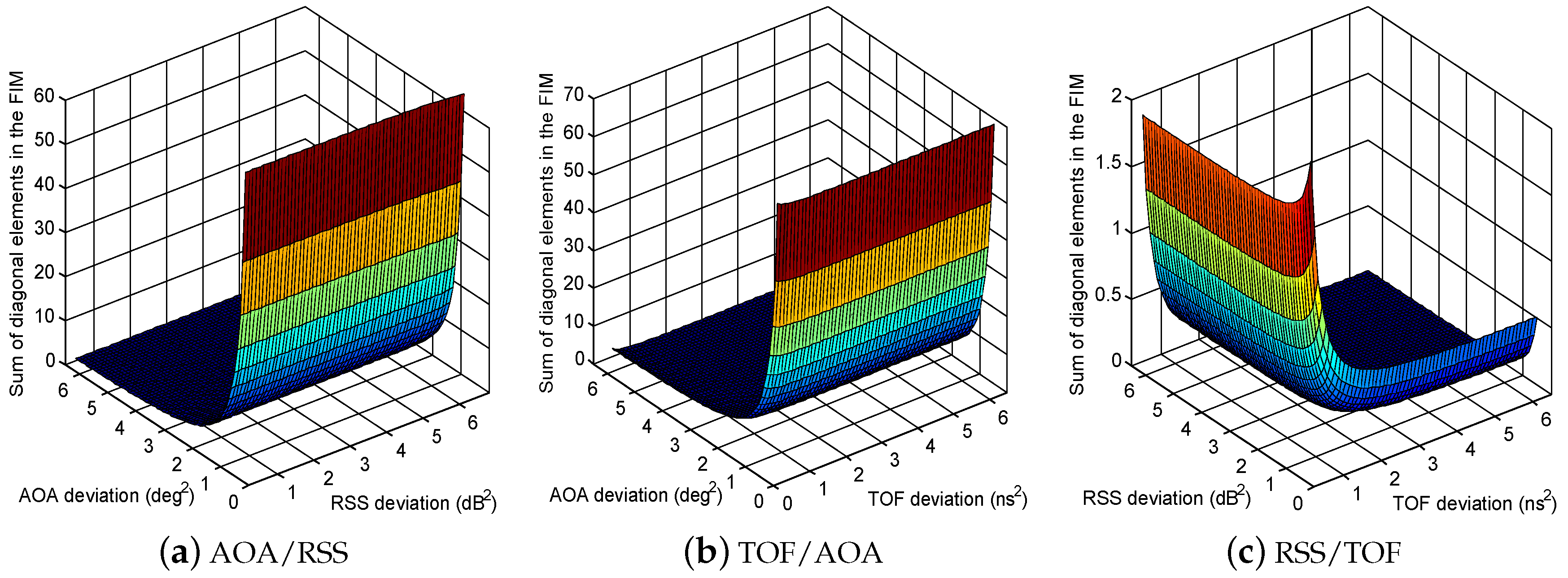
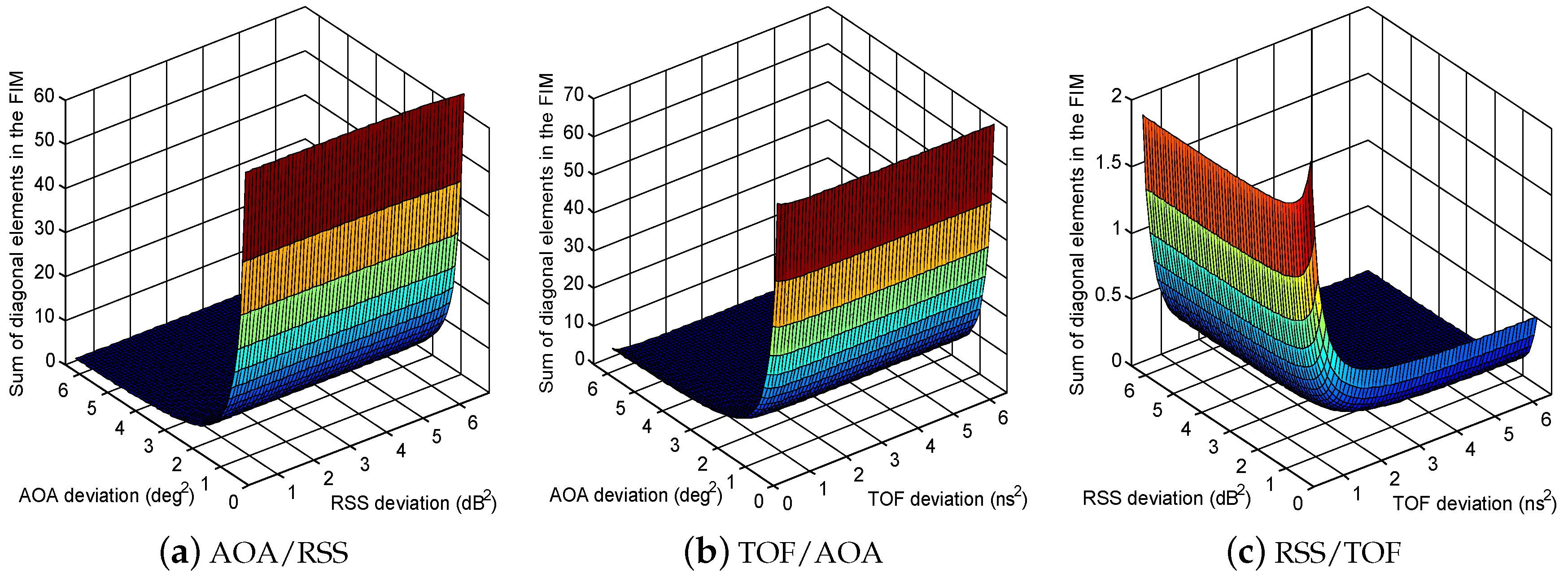
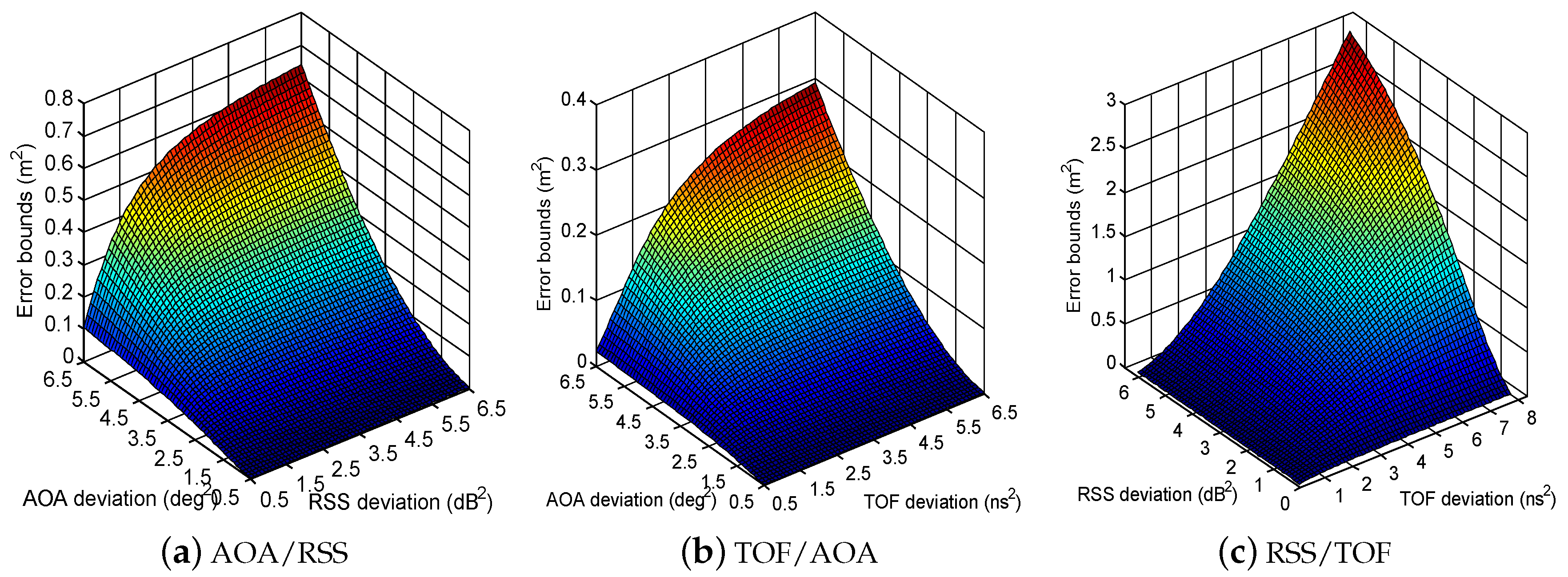
4.3.2. Performance of Metric of Double Measurements
4.3.3. Performance of JMART
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Barrios, C.; Motai, Y. Improving Estimation of Vehicle’s Trajectory Using the Latest Global Positioning System With Kalman Filtering. IEEE Trans. Instrum. Meas. 2011, 60, 3747–3755. [Google Scholar] [CrossRef]
- Zhou, M.; Wong, A.K.; Tian, Z.; Luo, X.; Xu, K.; Shi, R. Personal mobility map construction for crowd-sourced Wi-Fi based indoor mapping. IEEE Commun. Lett. 2014, 18, 1427–1430. [Google Scholar] [CrossRef]
- Kim, Y.; Shin, H.; Chon, Y.; Cha, H.; Campos, M. Crowdsensing-based Wi-Fi radio map management using a lightweight site survey. Comput. Commun. 2015, 60, 86–96. [Google Scholar] [CrossRef]
- Zhou, M.; Zhang, Q.; Xu, K.; Tian, Z.; Meng, Y.; He, W. PRIMAL: Page rank based indoor mapping and localization using gene sequenced unlabeled WLAN received signal strength. Sensors 2015, 15, 24791–24817. [Google Scholar] [CrossRef] [PubMed]
- Hossain, A.K.M.M.; Soh, W.S. A survey of calibration-free indoor positioning systems. Comput. Commun. 2015, 66, 1–13. [Google Scholar] [CrossRef]
- Kaemarungsi, K.; Krishnamurthy, P. Properties of indoor received signal strength for WLAN location fingerprinting. In Proceedings of the 1st Annual International Conference on Mobile and Ubiquitous Systems: Networking and Services, Boston, MA, USA, 26 August 2004; pp. 14–23.
- Gustafsson, F.; Gunnarsson, F. Mobile positioning using wireless networks: Possibilities and fundamental limitations based on available wireless network measurements. IEEE Signal Process. Mag. 2005, 22, 41–53. [Google Scholar] [CrossRef]
- Prince, G.B.; Little, T.D.C. A two phase hybrid RSS/AoA algorithm for indoor device localization using visible light. In Proceedings of the IEEE GLOBECOM, Anaheim, CA, USA, 3–7 December 2012; pp. 3347–3352.
- Kim, R.; Lim, H.; Hwang, S.N.; Obele, B.O. Robust indoor localization based on hybrid Bayesian graphical models. In Proceedings of the IEEE GLOBECOM, Austin, TX, USA, 8–12 December 2014; pp. 423–429.
- Yu, K.; Guo, Y.J. Statistical NLOS Identification Based on AOA, TOA, and Signal Strength. IEEE Trans. Veh. Technol. 2009, 58, 274–286. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M.; Dinis, R. Distributed RSS-AoA Based Localization With Unknown Transmit Powers. IEEE Wirel. Commun. Lett. 2016, 5, 392–395. [Google Scholar] [CrossRef]
- Wang, H.; Yip, L.; Yao, K.; Estrin, D. Lower bounds of localization uncertainty in sensor networks. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Montreal, QC, Canada, 17–21 May 2004; pp. 16–18.
- Zheng, X.; liu, H.; Yang, J.; Chen, Y. A Study of Localization Accuracy Using Multiple Frequencies and Powers. IEEE Trans. Parallel Distrib. Syst. 2014, 25, 1955–1965. [Google Scholar] [CrossRef]
- Yan, K.; Wu, H.C.; Lyengar, S.S. Robustness analysis and new hybrid algorithm of wideband source localization for acoustic sensor networks. IEEE Trans. Wirel. Commun. 2010, 9, 2033–2043. [Google Scholar] [CrossRef]
- Nguyen, T.V.; Jeong, Y.; Shin, H.; Win, M.Z. Least Square Cooperative Localization. IEEE Trans. Veh. Technol. 2015, 64, 1318–1330. [Google Scholar] [CrossRef]
- Wei, Q.; Zhang, D.; Han, J. Improved localisation method based on multi-hop distance unbiased estimation. IET Commun. 2014, 8, 2797–2804. [Google Scholar] [CrossRef]
- Angjelichinoski, M.; Denkovski, D.; Atanasovski, V.; Gavrilovska, L. Cramer-Rao lower bounds of RSS-based localization with anchor position uncertainty. IEEE Trans. Inf. Theory 2015, 61, 2807–2834. [Google Scholar] [CrossRef]
- Gazzah, L.; Najjar, L.; Besbes, H. Improved selective hybrid RSS/AOA weighting schemes for NLOS localization. In Proceedings of the 2014 International Conference on Multimedia Computing and Systems, Marrakech, Morocco, 14–16 April 2014; pp. 746–751.
- Prieto, J.; Mazuelas, S.; Bahillo, A.; Fernandez, P. Adaptive data fusion for wireless localization in harsh environments. IEEE Trans. Signal Process. 2012, 60, 1585–1596. [Google Scholar] [CrossRef]
- Wang, S.C.; Jackson, B.R.; Inkol, R. Hybrid RSS/AOA emitter location estimation based on least squares and maximum likelihood criteria. In Proceedings of the IEEE Biennial Symposium on Communications, Kingston, ON, Canada, 28–29 May 2012; pp. 24–29.
- Chan, F.; Wen, C. Adaptive AOA/TOA Localization Using Fuzzy Particle Filter for Mobile WSNs. In Proceedings of the IEEE VTC, Budapest, Hungary, 15–18 May 2011; pp. 1–5.
- Venkatesh, S.; Buehrer, M. Multiple-access insights from bounds on sensor localization. In Proceedings of the World of Wireless, Mobile and Multimedia Networks, Buffalo, NY, USA, 26–29 June 2006; pp. 2–12.
- Shen, Y.; Wymeersch, H.; Win, M.Z. Fundamental limits of wideband cooperative localization via fisher information. In Proceedings of the Wireless Communications and Networking Conference, Hong Kong, China, 11–15 March 2007; pp. 3954–3958.
- Dersan, A.; Tanik, Y. Passive radar localization by time difference of arrival. In Proceedings of the IEEE MILCOM, Anaheim, CA, USA, 7–10 October 2002; pp. 1251–1257.
- Chang, C.; Sahai, A. Estimation bounds for localization. In Proceedings of the IEEE Sensor and Ad Hoc Communications and Networks, Santa Clara, CA, USA, 4–7 October 2004; pp. 415–424.
- Hossain, A.K.M.M.; Soh, W.S. Cramer-Rao Bound Analysis of Localization Using Signal Strength Difference as Location Fingerprint. In Proceedings of the IEEE INFOCOM, San Diego, CA, USA, 14–19 March 2010; pp. 1–9.
- Patwari, N.; Hero, A.O. Location estimation accuracy in wireless sensor networks. In Proceedings of the IEEE Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 3–6 November 2002; pp. 1523–1527.
- Qi, Y.; Suda, H.; Kobayashi, H. On time-of-arrival positioning in a multipath environment. In Proceedings of the IEEE VTC, Milan, Italy, 17–19 May 2004; pp. 3540–3544.
- Botteron, C.; Host-Madsen, A.; Fattouche, M. Effects of system and environment parameters on the performance of network-based mobile station position estimators. IEEE Trans. Veh. Technol. 2004, 53, 163–180. [Google Scholar] [CrossRef]
- Botteron, C.; Host-Madsen, A.; Fattouche, M. Cramer-Rao bounds for the estimation of multipath parameters and mobiles’ positions in asynchronous DS-CDMA systems. IEEE Trans. Signal Process. 2004, 52, 862–875. [Google Scholar] [CrossRef]
- Trees, H.L.V. Optimum Array Processing: Part IV of Detection, Estimation and Modulation Theory; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2002. [Google Scholar]
- Alasti, H.; Xu, K.; Dang, Z. Efficient experimental path loss exponent measurement for uniformly attenuated indoor radio channels. In Proceedings of the IEEE Southeastcon, Atlanta, GA, USA, 5–8 March 2009; pp. 255–260.
- Herring, T.; Holloway, W.; Staelin, H. Path-Loss Characteristics of Urban Wireless Channels. IEEE Trans. Antennas Propag. 2010, 58, 171–177. [Google Scholar] [CrossRef]
- Eisayed, H.; Athanasious, G.; Fischione, C. Evaluation of localization methods in millimeter-wave wireless systems. In Proceedings of the IEEE Computer Aided Modeling and Design of Communication Links and Networks, Athens, Greece, 1–3 December 2014; pp. 345–349.


© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Q.; Qiu, F.; Zhou, M.; Tian, Z. Benefits and Impact of Joint Metric of AOA/RSS/TOF on Indoor Localization Error. Appl. Sci. 2016, 6, 296. https://doi.org/10.3390/app6100296
Jiang Q, Qiu F, Zhou M, Tian Z. Benefits and Impact of Joint Metric of AOA/RSS/TOF on Indoor Localization Error. Applied Sciences. 2016; 6(10):296. https://doi.org/10.3390/app6100296
Chicago/Turabian StyleJiang, Qing, Feng Qiu, Mu Zhou, and Zengshan Tian. 2016. "Benefits and Impact of Joint Metric of AOA/RSS/TOF on Indoor Localization Error" Applied Sciences 6, no. 10: 296. https://doi.org/10.3390/app6100296