
Wear Characteristics of Metallic Counterparts under Elliptical-Locus Ultrasonic Vibration


Abstract
:
1. Introduction
2. Experimental Details
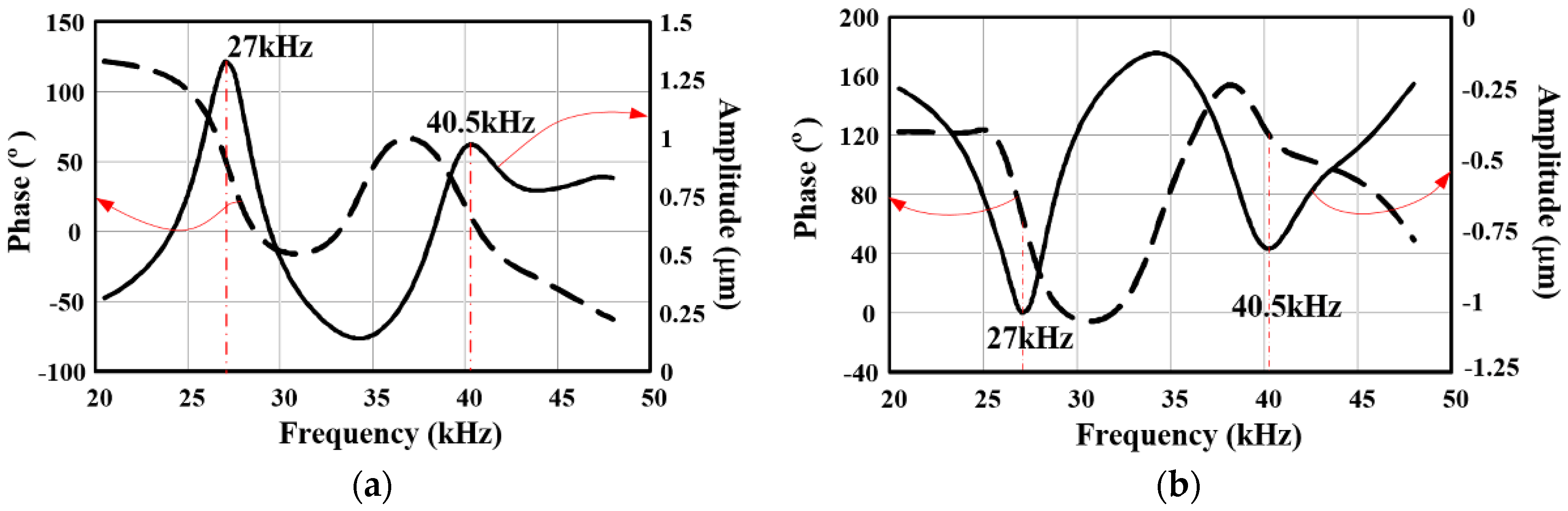
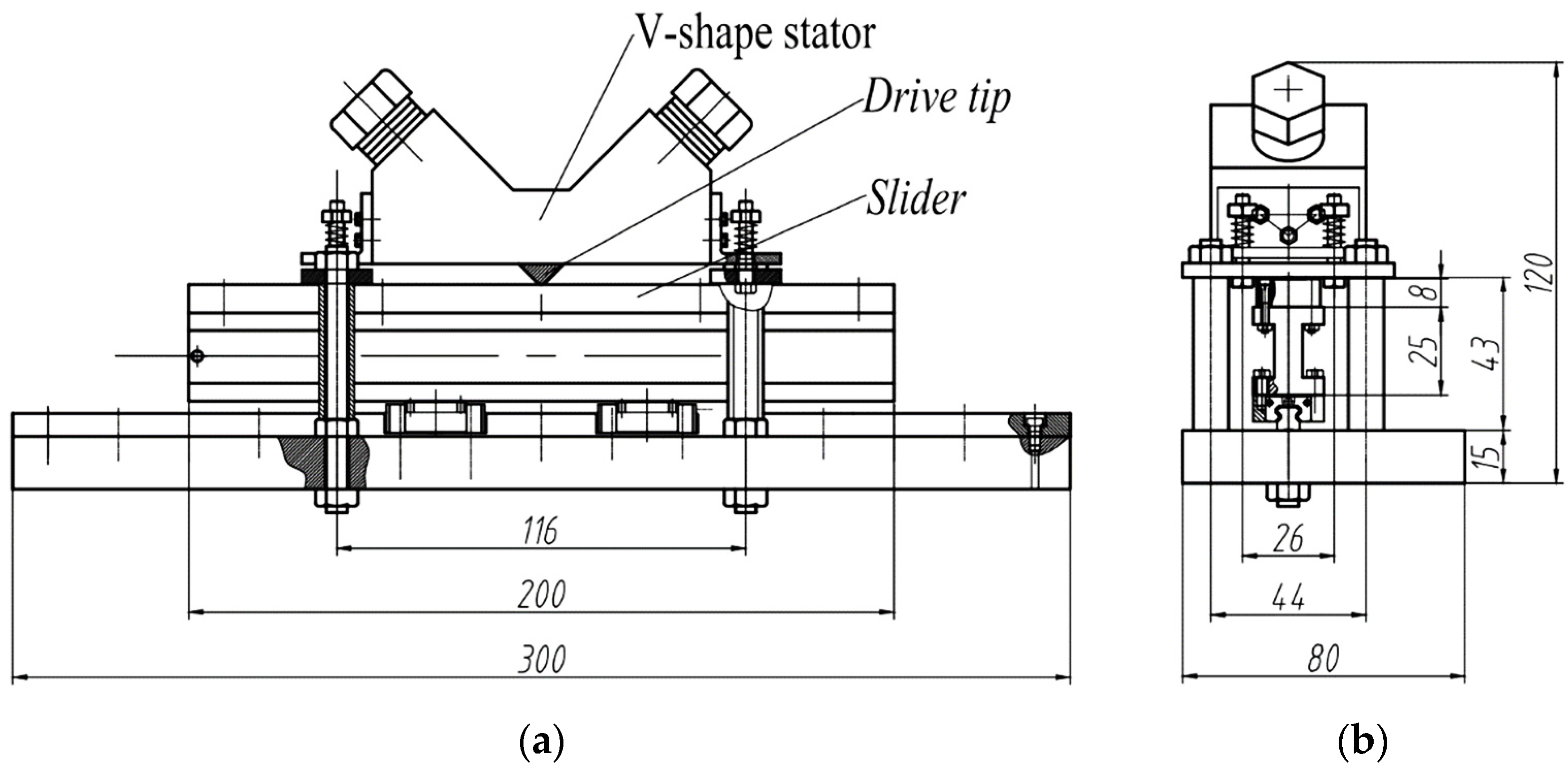
2.1. Apparatus
2.2. Materials and Methods
3. Results
3.1. Surface Characteristics
3.1.1. Surface Roughness
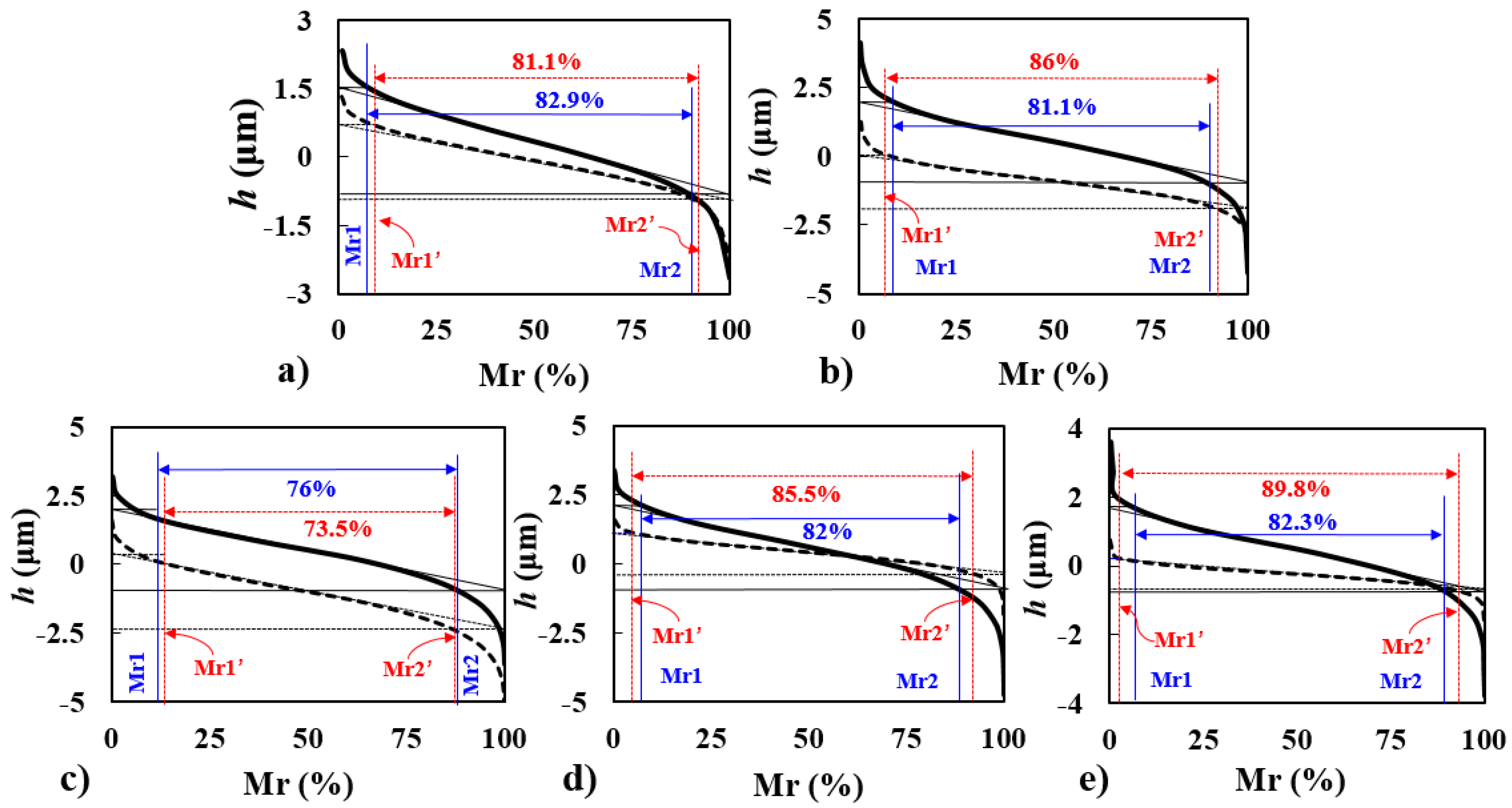
3.1.2. Abbott Curves
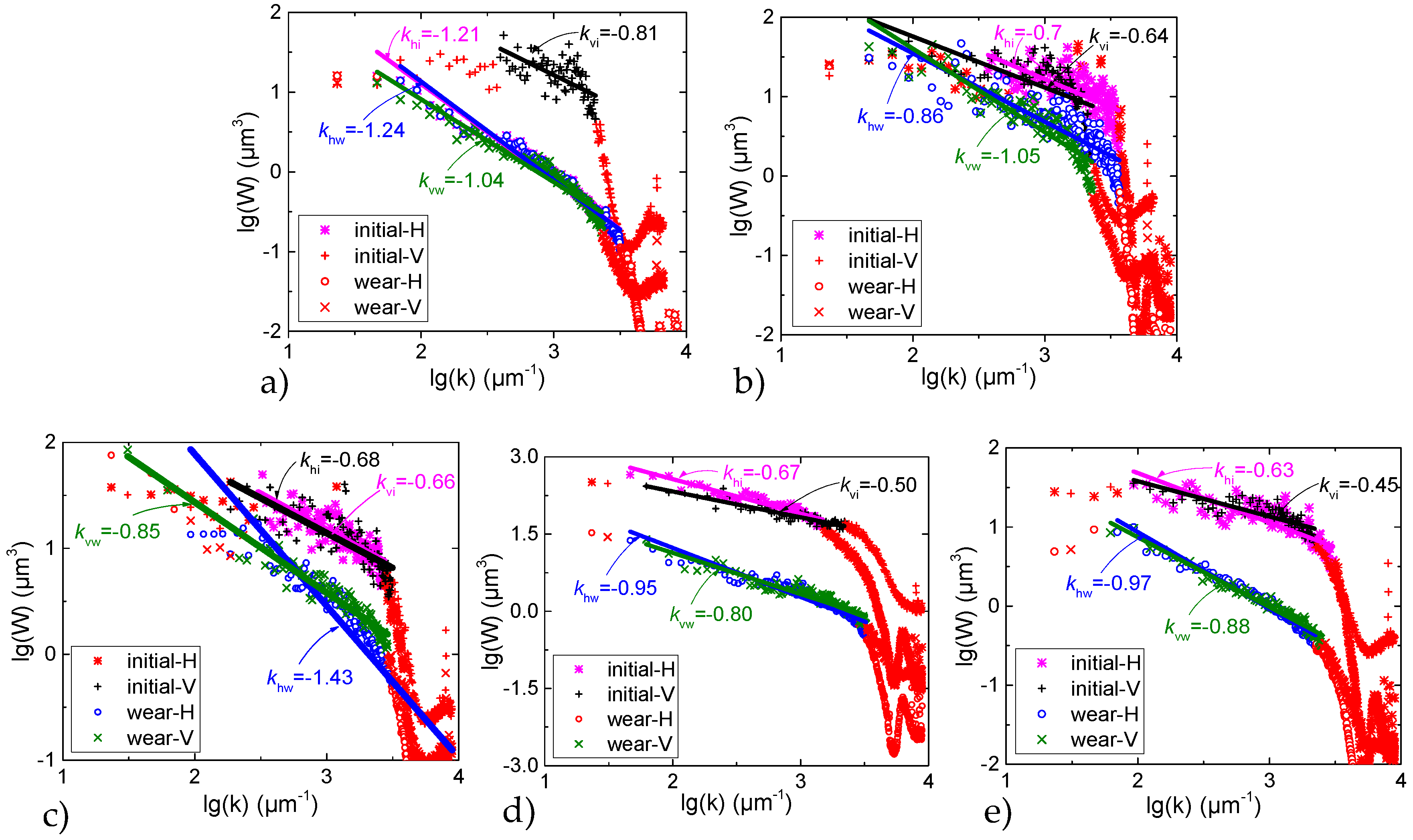
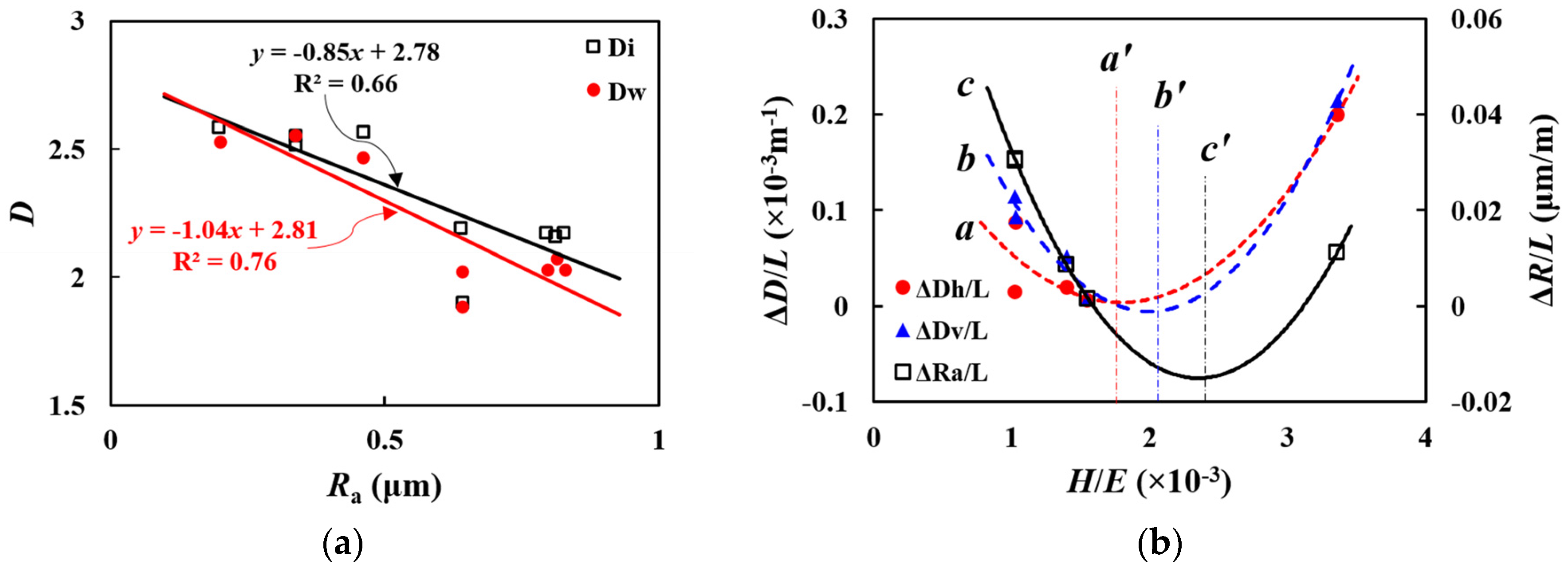
3.1.3. Fractal Dimension
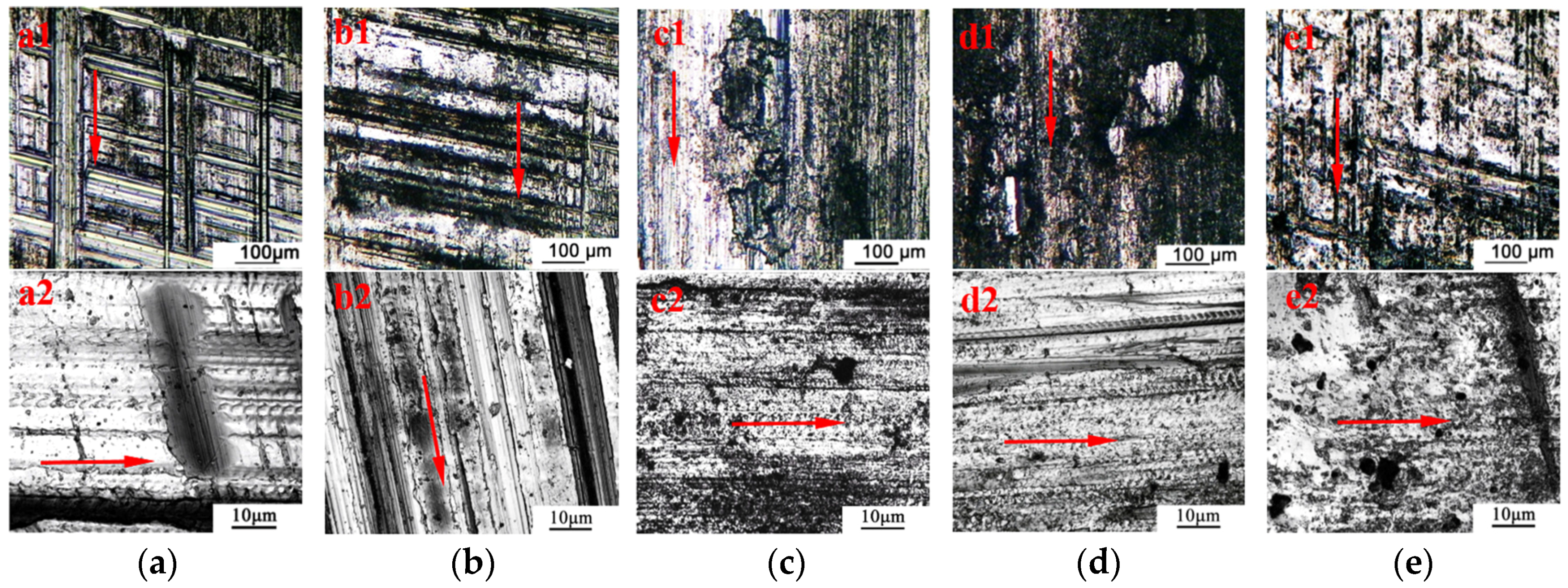
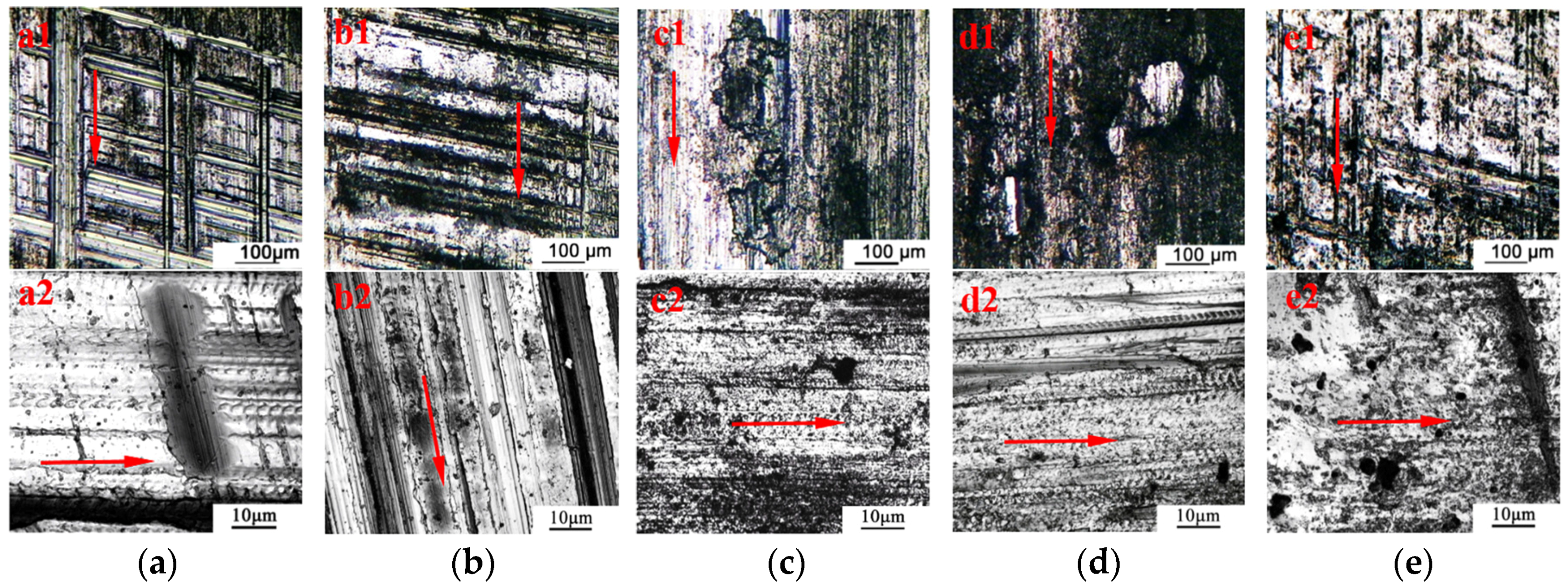
3.2. Wear Topography
3.3. Generation Mechanism of Smooth Surfaces
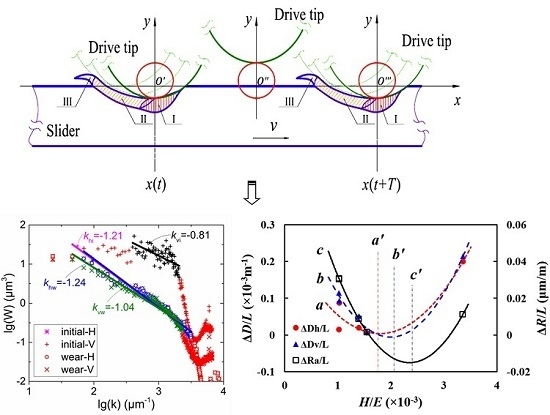
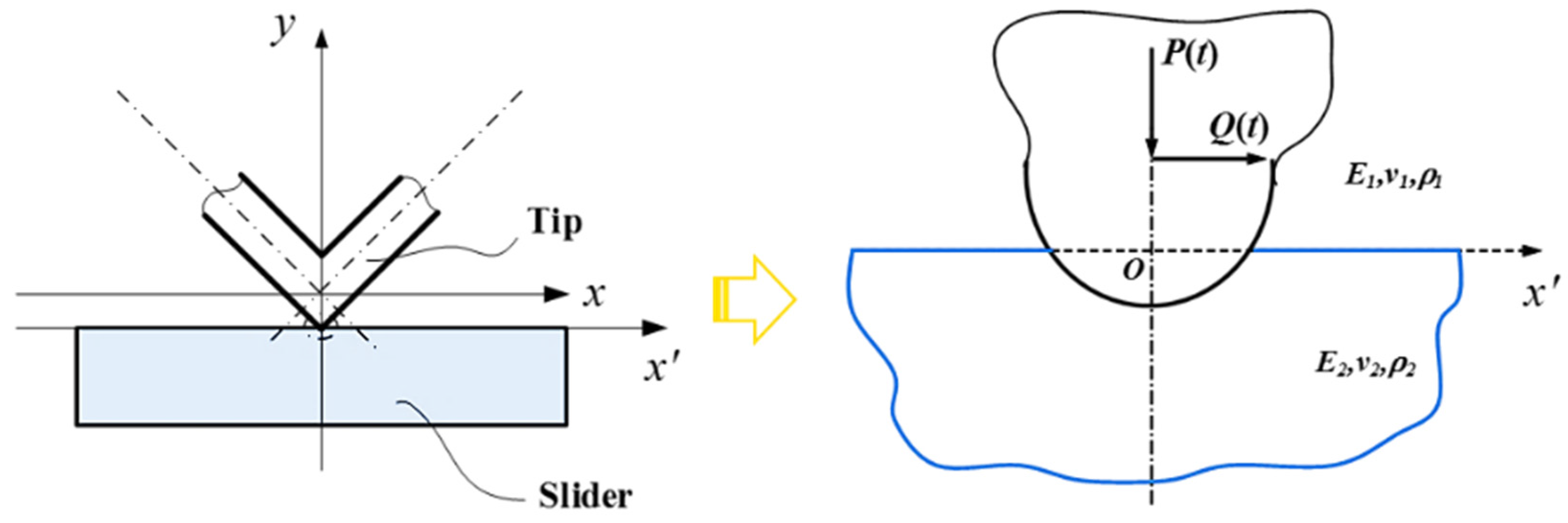
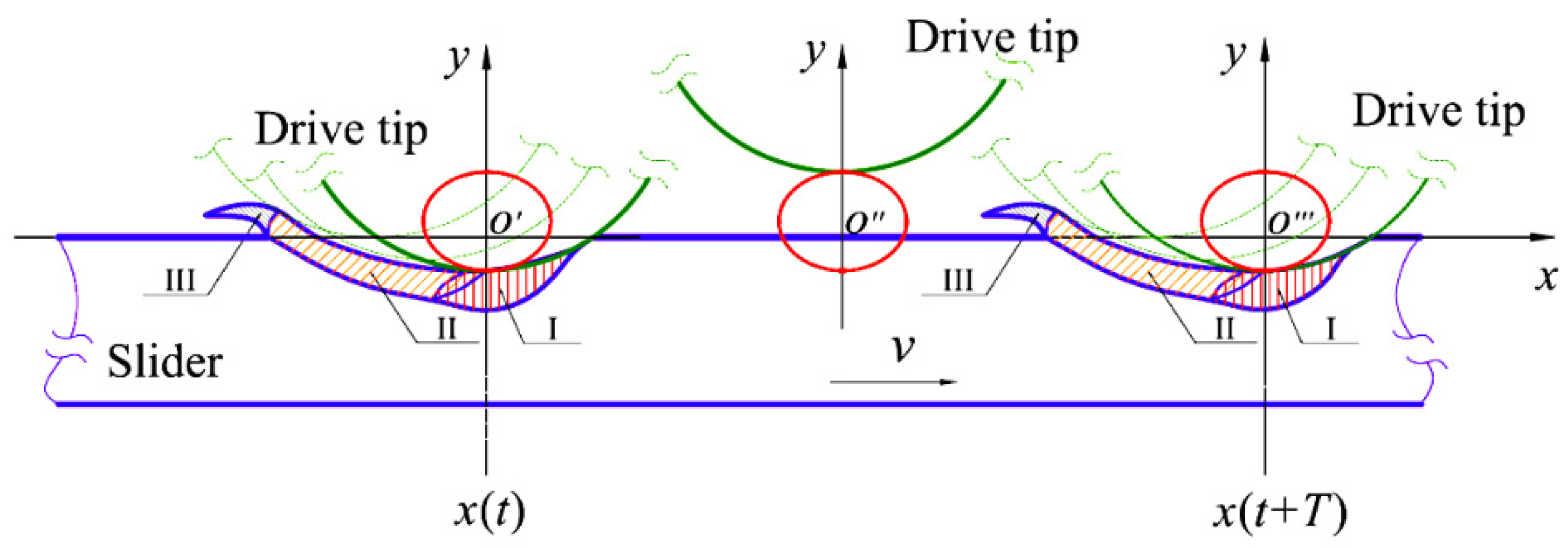
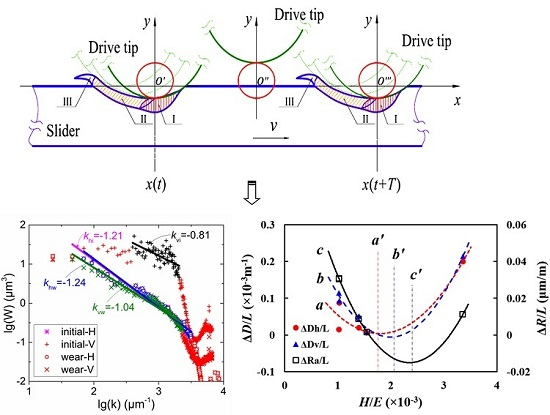
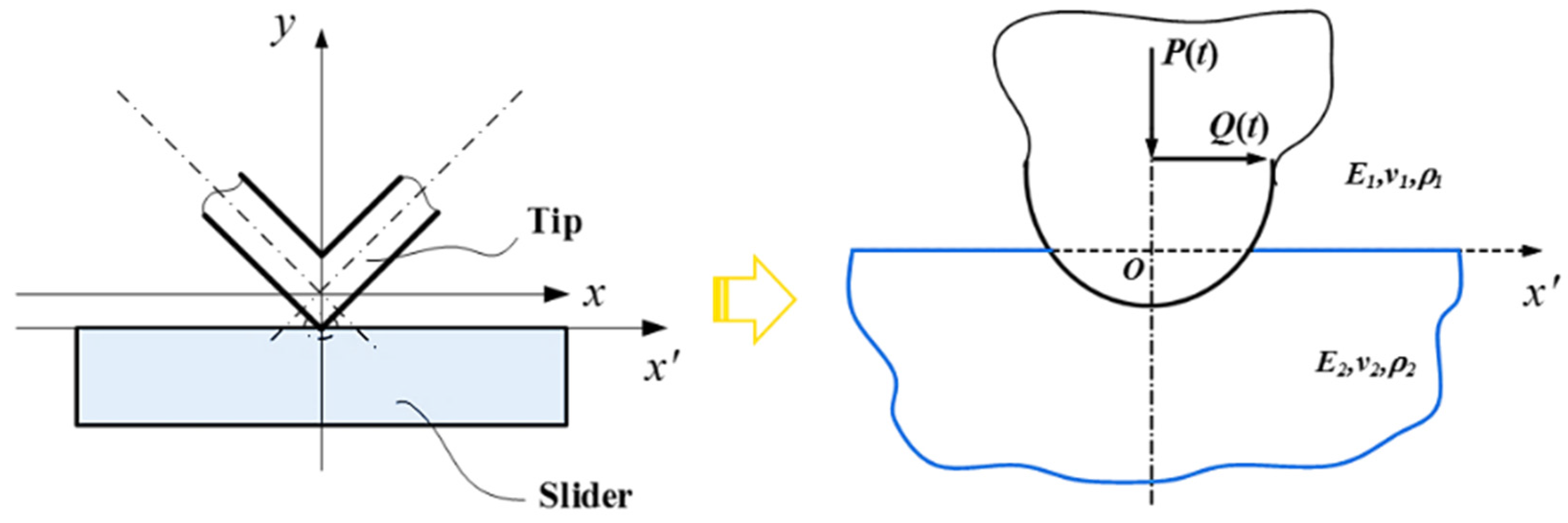
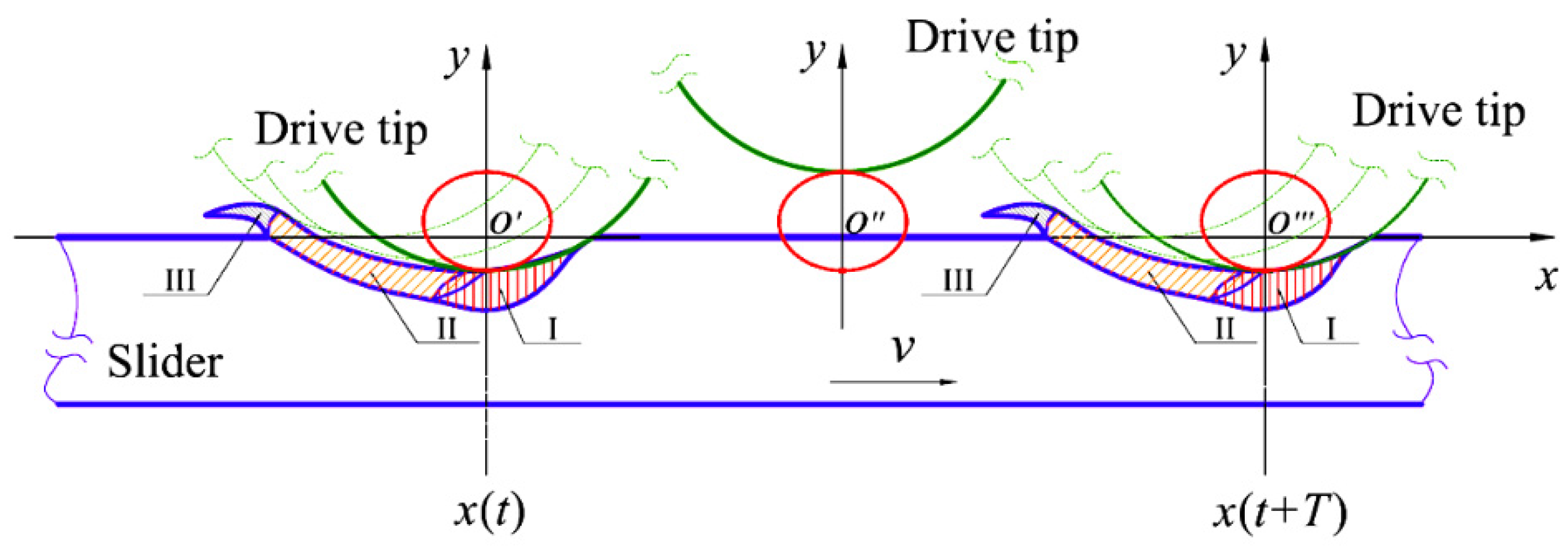
3.3.1. Spatial Envelopes with Rolling-Sliding Friction
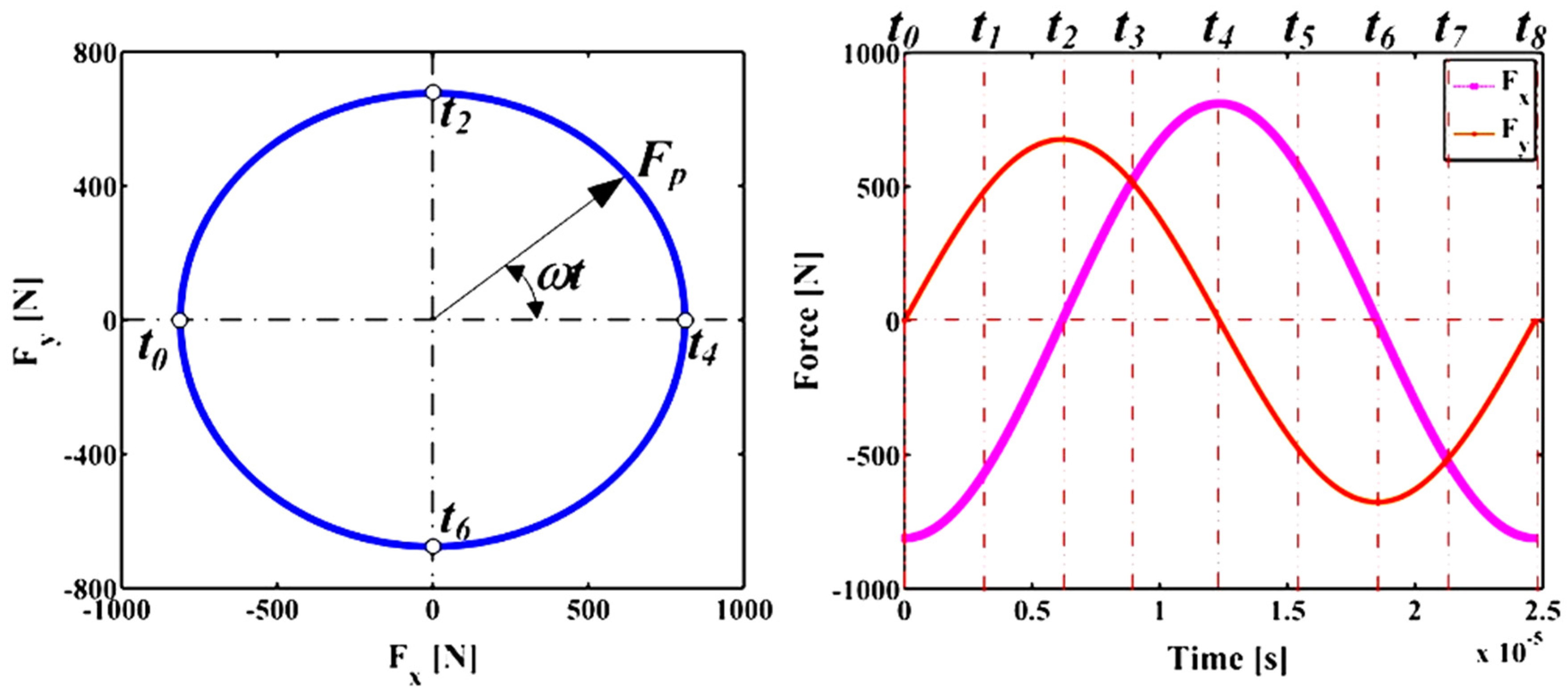
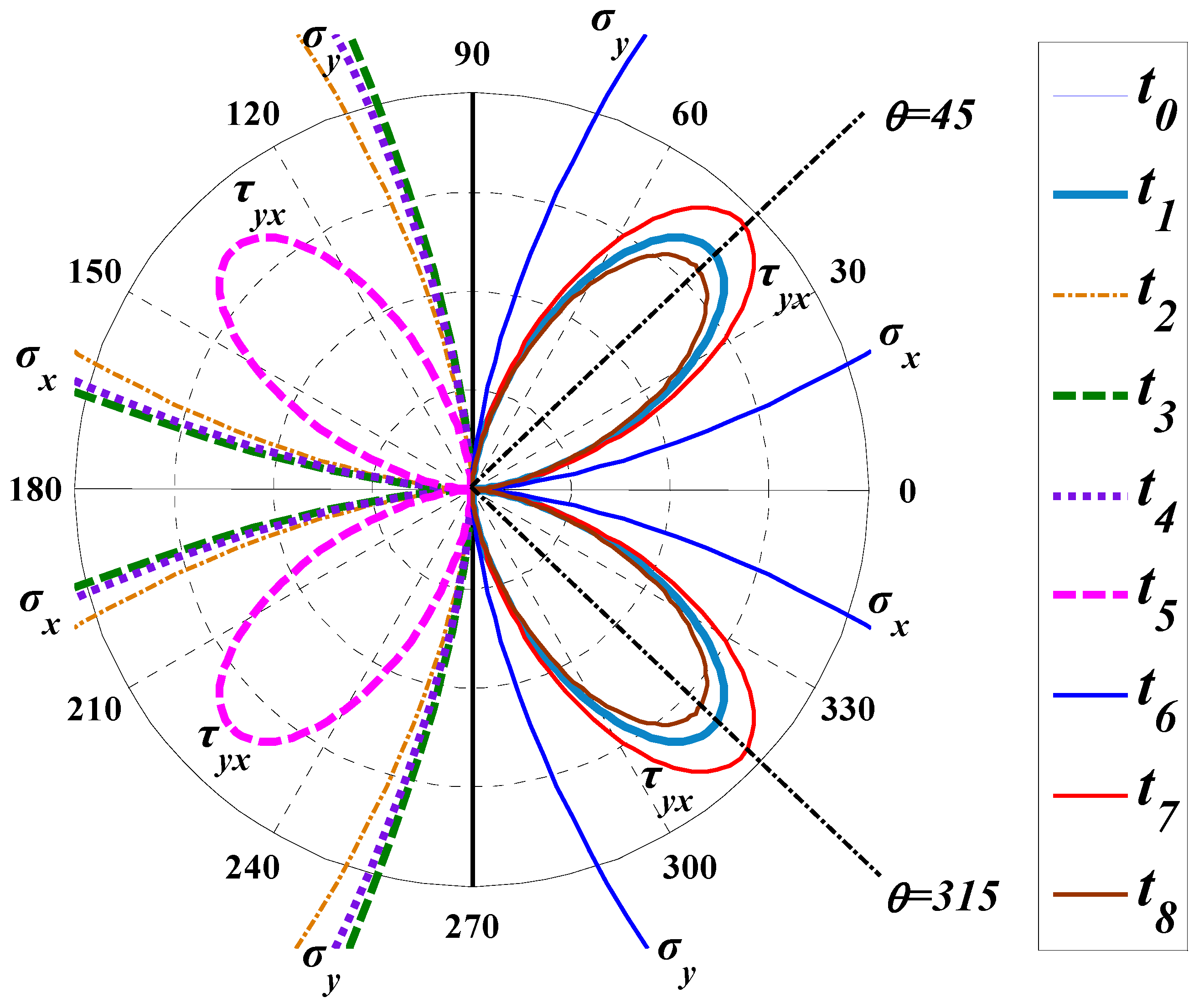
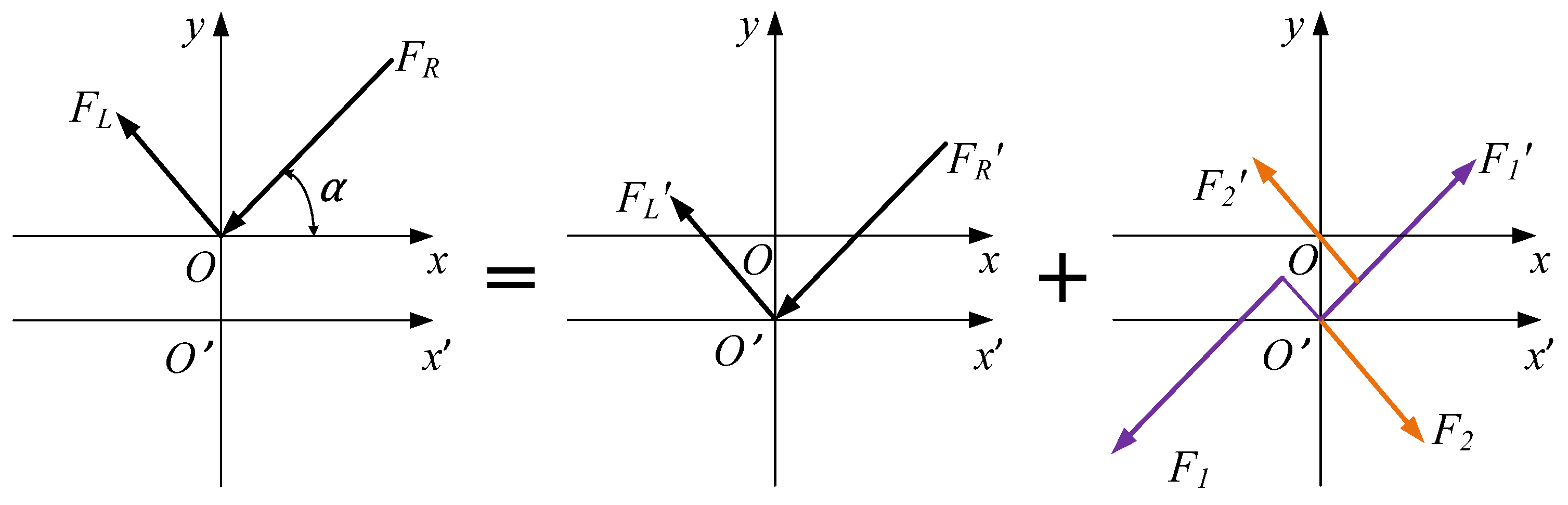
3.3.2. Temporal Stresses of Dynamic Contact
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Thoe, T.B.; Aspinwall, D.K.; Wise, M.L.H. Review on ultrasonic machining. Int. J. Mach. Tools Manuf. 1998, 38, 239–255. [Google Scholar] [CrossRef]
- Moriwaki, T.; Shamoto, E. Ultrasonic elliptical vibration cutting. CIRP Ann. Manuf. Technol. 1995, 44, 31–34. [Google Scholar] [CrossRef]
- Kurosawa, M.K. State-of-the-art surface acoustic wave linear motor and its future applications. Ultrasonics 2000, 38, 15–19. [Google Scholar] [CrossRef]
- Hemsel, T.; Wallaschek, J. Survey of the present state of the art of piezoelectric linear motors. Ultrasonics 2000, 38, 37–40. [Google Scholar] [CrossRef]
- Kumar, V.C.; Hutchings, I.M. Reduction of the sliding friction of metals by the application of longitudinal or transverse ultrasonic vibration. Tribol. Int. 2004, 37, 833–840. [Google Scholar] [CrossRef]
- Storck, H.; Littmann, W.; Wallaschek, J.; Mracek, M. The effect of friction reduction in presence of ultrasonic vibrations and its relevance to travelling wave ultrasonic motors. Ultrasonics 2002, 40, 379–383. [Google Scholar] [CrossRef]
- Littmann, W.; Storck, H.; Wallaschek, J. Sliding friction in the presence of ultrasonic oscillations: Superposition of longitudinal oscillations. Arch. Appl. Mechanics 2001, 71, 549–554. [Google Scholar] [CrossRef]
- Ishii, T.; Matsuo, E.; Nakamura, K.; Ueha, S.; Ohnishi, K. Characteristics of ultrasonic motors driven in a vacuum. Jpn. J. Appl. Phys. 1998, 37, 2956–2959. [Google Scholar] [CrossRef]
- Wurpts, W.; Twiefel, J. Analysis of ultrasonic vibro-impact systems with equivalent circuits and the harmonic balance method. Sens. Actuators A Phys. 2013, 200, 114–122. [Google Scholar] [CrossRef]
- He, S.; Chen, W.; Tao, X.; Chen, Z. Standing wave bi-directional linearly moving ultrasonic motor. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1998, 45, 1133–1139. [Google Scholar] [PubMed]
- Shi, Y.; Zhao, C.; Zhang, J. Contact analysis and modeling of standing wave linear ultrasonic motor. J. Wuhan Univ. Technol. Mater. Sci. Ed. 2011, 26, 1235–1242. [Google Scholar] [CrossRef]
- Senjyu, T.; Yokoda, S.; Uezato, K. Speed control of ultrasonic motors using fuzzy neural network. J. Intell. Fuzzy Syst. 2000, 8, 135–146. [Google Scholar]
- Lee, K.J.; Ko, H.P.; Kang, C.Y.; Kim, H.J.; Yoon, S.J.; Nahm, S. A study on the friction and thrust force of the shaft and mobile element in the impact typed piezoelectric ultrasonic linear motor. J. Electroceramics 2006, 17, 499–503. [Google Scholar] [CrossRef]
- Zhang, J.; Yao, Z.Y. Friction and wear test device of linear ultrasonic motor and experimental studies. In Proceedings of the 2010 Symposium on Piezoelectricity, Acoustic Waves and Device Applications, SPAWDA10, Xiamen, China, 10–13 December 2010.
- Zhao, W.T.; Yao, Z.Y.; Wang, X.N.; Ge, Z.F.; Zhou, S.L. Friction and wear test device of linear ultrasonic motor and experimental studies. In Proceedings of the 2011 Symposium on Piezoelectricity, Acoustic Waves and Device Applications, SPAWDA 2011, Shenzhen, China, 9–11 December 2011.
- Yamaguchi, T.; Adachi, K.; Ishimine, Y.; Kato, K. Wear mode control of drive tip of ultrasonic motor for precision positioning. Wear 2004, 256, 145–152. [Google Scholar] [CrossRef]
- Archard, J.F. Elastic deformation and the laws of friction. Proc. R. Soc. Lond. Ser A Math. Phys. Sci. 1957, 243, 190–205. [Google Scholar] [CrossRef]
- Greenwood, J.A.; Williamson, J.B.P. Contact of nominally flat surfaces. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1966, 295, 300–319. [Google Scholar] [CrossRef]
- Nayak, P.R. Random process model of rough aurfaces. J. Lubr. Technol. 1971, 93, 398–407. [Google Scholar] [CrossRef]
- Militký, J.; Bajzík, V. Surface roughness and fractal dimension. J. Text. Inst. 2001, 92, 91–113. [Google Scholar] [CrossRef]
- Mandelbrot, B.B.; Passoja, D.E.; Paullay, A.J. Fractal character of fracture surfaces of metals. Nature 1984, 308, 721–722. [Google Scholar] [CrossRef]
- Majumdar, A.; Tien, C.L. Fractal characterization and simulation of rough surfaces. Wear 1990, 136, 313–327. [Google Scholar] [CrossRef]
- Durst, P.J.; Mason, G.L.; McKinley, B.; Baylot, A. Predicting rms surface roughness using fractal dimension and psd parameters. J. Terramech. 2011, 48, 105–111. [Google Scholar] [CrossRef]
- Liu, P.; Zhao, H.; Huang, K.; Chen, Q. Research on normal contact stiffness of rough surface considering friction based on fractal theory. Appl. Surf. Sci. 2015, 349, 43–48. [Google Scholar] [CrossRef]
- Alcock, J.; Sorensen, O.T.; Jensen, S.; Kjeldsteen, P. Comparative wear mapping techniques. 2. Surface roughness and fractal dimension mapping of tungsten carbide/silicon carbide. Wear 1996, 194, 228–237. [Google Scholar] [CrossRef]
- Longuet-Higgins, M.S. A fractal approach to breaking waves. J. Phys. Oceanogr. 1994, 24, 1834–1838. [Google Scholar] [CrossRef]
- Stemp, W.J. A review of quantification of lithic use-wear using laser profilometry: A method based on metrology and fractal analysis. J. Archaeol. Sci. 2014, 48, 15–25. [Google Scholar] [CrossRef]
- Kurosawa, M.K.; Kodaira, O.; Tsuchitoi, Y.; Higuchi, T. Transducer for high speed and large thrust ultrasonic linear motor using two sandwich-type vibrators. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1998, 45, 1188–1195. [Google Scholar] [CrossRef] [PubMed]
- Asumi, K.; Fukunaga, R.; Fujimura, T.; Kurosawa, M.K. Miniaturization of a v-shape transducer ultrasonic motor. Jpn. J. Appl. Phys. 2009, 48. [Google Scholar] [CrossRef]
- Gadelmawla, E.S.; Koura, M.M.; Maksoud, T.M.A.; Elewa, I.M.; Soliman, H.H. Roughness parameters. J. Mater. Process. Technol. 2002, 123, 133–145. [Google Scholar] [CrossRef]
- Nečas, D.; Klapetek, P. Gwyddion: An open-source software for spm data analysis. Cent. Eur. J. Phys. 2011, 10, 181–188. [Google Scholar] [CrossRef]
- Ganti, S.; Bhushan, B. Generalized fractal analysis and its applications to engineering surfaces. Wear 1995, 180, 17–34. [Google Scholar] [CrossRef]
- Persson, B.N.J. Contact mechanics for randomly rough surfaces. Surf. Sci. Rep. 2006, 61, 201–227. [Google Scholar] [CrossRef]
- Ponson, L.; Auradou, H.; Pessel, M.; Lazarus, V.; Hulin, J.P. Failure mechanisms and surface roughness statistics of fractured fontainebleau sandstone. Phys. Rev. E 2007, 76, 036108. [Google Scholar] [CrossRef] [PubMed]
- Mijović, B.; Džoklo, M. Numerical model of a hertz contact between two elastic solids. Int. J. Eng. Model. 2000, 13, 111–117. [Google Scholar]
- Mahmoud, F.F.; Hassan, M.M.; Salamon, N.J. Dynamic contact of deformable bodies. Comput. Struct. 1990, 36, 169–181. [Google Scholar] [CrossRef]
- Johnson, K.L. Contact Mechanics; Cambridge University Press: Cambridge, UK, 1985; p. 448. [Google Scholar]
- Bethune, B.; Waterhouse, R.B. Adhesion of metal surfaces under fretting conditions i. Like metals in contact. Wear 1968, 12, 289–296. [Google Scholar] [CrossRef]
- Budinski, K.G. Effect of hardness differential on metal-to-metal fretting damage. Wear 2013, 301, 501–507. [Google Scholar] [CrossRef]
- Alic, J.A.; Hawley, A.L.; Urey, J.M. Formation of fretting fatigue cracks in 7075-t7351 aluminum alloy. Wear 1979, 56, 351–361. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | 2A12 | 45 | 7075 | Q345B | QT700 |
|---|---|---|---|---|---|
| Density (g/cm3) | 2.85 | 7.89 | 2.81 | 7.87 | 7.09 |
| Elastic modulus (GPa) | 74.2 | 209 | 72 | 212 | 169 |
| Shear modulus (GPa) | 27.3 | 82.3 | 26.9 | 80.7 | 64.7 |
| Yield stress (MPa) | 265 | 355 | 505 | 250 | 420 |
| Poisson ratio | 0.36 | 0.269 | 0.33 | 0.31 | 0.305 |
| Specific heat (J/(kg·K)) | 460 | 450 | 960 | 450 | 510 |
| Thermal diffusivity (10−6/K) | 23.8 | 11.7 | 24 | 12.8 | 10.8 |
| Heat conductivity (W/(m·K)) | 44 | 48 | 130 | 48 | 47 |
| HBS (MPa) | 187 | 214/292 * | 242 | 218 | 262 |
| Material | 45 #1 | 45 #2 | 7075 | Q345B | QT700 |
|---|---|---|---|---|---|
| Preload (N) | 22 | 22 | 22 | 22 | 22 |
| Voltage (V) | 150 | 150 | 150 | 150 | 150 |
| Frequency (kHz) | 39.8 | 39.8 | 39.8 | 39.8 | 39.8 |
| Mean velocity (mm/s) | 208 | 130 | 105 | 102 | 101 |
| Parameter | Ra/μm | Rp/μm | Rv/μm | Rs/μm | ||||
|---|---|---|---|---|---|---|---|---|
| Slider | Initial | Wear | Initial | Wear | Initial | Wear | Initial | Wear |
| 45 #1 | 0.64 | 0.34 | 2.34 | 1.34 | −2.67 | −2.17 | 18.9 | 37.4 |
| 45 #2 | 0.81 | 0.46 | 4.12 | 1.27 | −4.25 | −3.72 | 18.7 | 25.3 |
| 7075 | 0.79 | 0.71 | 3.18 | 1.64 | −3.65 | −5.05 | 18.3 | 20.7 |
| Q345B | 0.83 | 0.34 | 3.39 | 1.61 | −4.71 | −1.82 | 17.2 | 34.5 |
| QT700 | 0.64 | 0.20 | 3.61 | 0.75 | −3.78 | −1.61 | 19.3 | 48.2 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Qu, J.; Wang, H. Wear Characteristics of Metallic Counterparts under Elliptical-Locus Ultrasonic Vibration. Appl. Sci. 2016, 6, 289. https://doi.org/10.3390/app6100289
Zhang Y, Qu J, Wang H. Wear Characteristics of Metallic Counterparts under Elliptical-Locus Ultrasonic Vibration. Applied Sciences. 2016; 6(10):289. https://doi.org/10.3390/app6100289
Chicago/Turabian StyleZhang, Yanhu, Jianjun Qu, and Hongxiang Wang. 2016. "Wear Characteristics of Metallic Counterparts under Elliptical-Locus Ultrasonic Vibration" Applied Sciences 6, no. 10: 289. https://doi.org/10.3390/app6100289