
Topology of Platonic Spherical Manifolds: From Homotopy to Harmonic Analysis

Abstract
: We carry out the harmonic analysis on four Platonic spherical three-manifolds with different topologies. Starting out from the homotopies (Everitt 2004), we convert them into deck operations, acting on the simply connected three-sphere as the cover, and obtain the corresponding variety of deck groups. For each topology, the three-sphere is tiled into copies of a fundamental domain under the corresponding deck group. We employ the point symmetry of each Platonic manifold to construct its fundamental domain as a spherical orbifold. While the three-sphere supports an orthonormal complete basis for harmonic analysis formed by Wigner polynomials, a given spherical orbifold leads to a selection of a specific subbasis. The resulting selection rules find applications in cosmic topology, probed by the cosmic microwave background.1. Introduction
In 1917, Einstein replaced the Euclidean three-space by the three-sphere and so introduced the first spherical manifold to describe the spatial part of the Universe [1]. More generally, three-manifolds with non-Euclidean topology have in recent years found applications in cosmology, in particular in relation to the multipole analysis of the cosmic microwave background (CMB) radiation. Cosmological models with positive curvature are related to the three-sphere.
The three-sphere covers all spherical three-manifolds, including the Platonic manifolds considered here. For the Poincarés dodecahedral three-manifold, the first orthonormal basis required for the multipole analysis was constructed in [2], using Lie algebraic methods and drawing on work by Klein 1884 [3].
Compared to other manifolds, the Platonic three-manifolds have the advantage that their homotopies have been derived and classified in 2004 by Everitt [4]. The homotopies are fundamental for the mathematical analysis of the topology of manifolds [5–9]. The connection of multipole-resolved CMB measurements to cosmic topology is provided by selection rules for the harmonic analysis.
Surprisingly, there is no systematic account that links the homotopy of Platonic manifolds to deck groups and to their harmonic analysis and selection rules. Our aim is to close this gap.
We start by relating the three-sphere to the group SU(2, C) in Section 2. The representations of the group SU(2, C) yield the Wigner polynomials introduced in Section 3, with unitary actions resulting in a multipole decomposition discussed in Section 4. In Section 5, we index the Wigner basis polynomials by points on an m-grid in two dimensions in preparation for deriving topological selection rules.
The Platonic spherical polyhedra are constructed in Sections 6 and 7 by use of four spherical Coxeter groups for the tetrahedron, cube, octahedron and dodecahedron. The Platonic homotopy groups from [4] are expressed in Sections 8 and 9 by the gluings of faces and directed edges of the Platonic polyhedra.
In the central Section 10, we use the isomorphism of homotopy and deck groups. Any topological spherical three-manifold appears on its universal cover S3 in the form of a tiling. Any tile is an image of the spherical manifold. The tiles are related to one another by deck actions from the deck group. We construct from the homotopies of [4] the isomorphic deck actions on the three-sphere S3 and, from them determine, the deck groups for the Platonic manifolds. The deck groups are factorized in Section 11 by the point symmetry groups of the Platonic polyhedra. We handle fixpoints under rotations in point groups by the new construction of multiply-connected topological orbifolds. Whereas a topological manifold strictly excludes fixpoints under deck actions, orbifolds allow for such fixpoints ([7,9] and pp. 652–714 in [8]).
For the harmonic analysis on orbifolds, we employ in Section 12 Wigner polynomials with restrictions to the subgrid representation of topological selection rules. The resulting subbases appear as denumerable sets of Wigner polynomials on subgrids, as shown in Figure 3 and extend earlier work [10]. The m-grid representation allows in Section 13 for a very transparent graphical display of the restriction from general bases to subbases of a given topology.
Finally in Section 14, we present the application of topology to cosmology. In contrast to Einstein’s closure of the spatial part of space-time on the simply-connected three-sphere, we discuss the closure on spherical orbifolds and incorporate a wider variety of multiply-connected cosmologies. Our harmonic analysis on orbifolds yields for each orbifold specific multipole selection rules and, moreover, predicts topological correlations between different multipole orders (l, l′) of the CMB.
2. The Three-Sphere S3 Is Unitary
In three-dimensional topology, the three-sphere S3 is the simply-connected universal cover [7] (p. 290) of spherical topologies. The points of the three-sphere, seen in Euclidean space E4 with covariant coordinates, are:
They are in one-to-one correspondence to the elements of the unitary unimodular group SU(2, C). From real coordinates of E4: x = (x0, x1, x2, x3), we pass to a 2 × 2 unimodular unitary matrix u(x) ∈ SU(2, C) in the form:
As angular coordinates on SU(2, C), we can use the Euler angles (α, β, γ) [11] (pp. 6–8). In these, the matrix u takes the form:
The measure of integration in the Euler angles becomes [11] (p. 62),
Summary: The three-sphere S3 corresponds one-to-one to the group SU(2, C). From this correspondence, the isometries of S3 inherit a unitary structure. This provides the full representation theory [11] of the group SU(2, C) as a tool for spherical topology.
3. Wigner Polynomials
The finite irreducible unitary representations of SU(2, C) were studied by Wigner [12]. For unitarity and the irreducibility of representations, we refer to his monograph. We now introduce the Wigner polynomials. We shall show that they span the harmonic analysis on the three-sphere [2] and play an important part in topological analysis.
Let the matrix u ∈ SU(2, C) Equation (2) act from the left on the complex column vector:
In the Bargmann–Hilbert space of analytic functions [13] in two complex variables (a, b), the monomials:
With m either an integer or half-integer, under the action Equation (5), the monomials in Equation (6) carry irreducible representations of SU(2, C) and transform as:
The (2j + 1)2 coefficients in this equation are the Wigner Dj-functions [11] (Equation (4.1.10)). Wigner [12] has shown that the Dj-functions are the unitary irreducible representations of SU(2, C). We replace Euler angles by four complex variables from Equation (2) in the arguments of the Dj. Following [2], we term the resulting complex valued polynomials Wigner polynomials. From Equation (8), they are given by:
All exponents of the four complex variables in Equation (9) are integers and must be non-negative. This restricts the summation over the integer σ. Two important properties of these Wigner polynomials arise under inversion and under complex conjugation of the matrix u,
We prove that the Wigner polynomials vanish under the Laplacian on E4 and, so, are harmonic. Consider first the case m1 = j. This implies σ = j − m2,
The polynomials Equation (11) are analytic in (z1, z2), and so, by the Cauchy–Riemann differential equations, vanish under the Laplacian Δ on E4. From the particular polynomials Equation (11), we can lower the eigenvalue m2 = j to any value m2 = j − 1, …, −l for fixed degree 2j by the application of the left lowering operator of SU(2, C)C, given from [2] (Equation (35)) by:
By repeated application of this lowering operator, we can reach all of the (2j + 1)2 Wigner polynomials for fixed degree 2j. The lowering operator commutes with the Laplacian Δ on E4 and, so, cannot change its eigenvalue zero. It follows that all of the Wigner polynomials Equation (9) are harmonic.
The action of the rotation group SO(4;R) is expressed by left and right actions on SU(2;C). When restricted to conjugation, its action reduces to rotations only of the three coordinates (x1, x2, x3) ∈ E3; see Equation (24). The orthogonality of the Wigner polynomials, expressed in the Euler angles, is [11] (p. 62)
Summary: The Wigner polynomials, Equation (6), are harmonic, orthonormal and homogeneous of degree 2j = 0, 1, 2, …, ∞. Their transformation properties under SU(2, C) are well known from the theory of angular momentum in quantum mechanics [11].
4. Unitary Actions and Representations
The group of isometries of S3 is SO(4, R). The action of this group is isomorphic to the direct product of a left and a right group SUl(2, C), SUr(2, C) acting on u ∈ SU(2, C) in the form:
The left and right action groups in Equation (14) commute and act as:
The subgroup Z2 in Equation (14) is generated by (gl, gr) = (−e, −e) ∈ (SUl(2, C) × SUr(2, C)). The direct product form Equation (14), contrary to what is asserted in [14] (p. 277), in general does not extend to subgroups of SO(4, R) and, so, cannot yield their classification. A counter-example is provided by the deck group C5 of the tetrahedral manifold (Equation (42)), which entangles left and right actions.
Among the actions described by Equation (15) are the conjugation actions:
The unitary structure of the three-sphere governs its isometries and introduces the representation theory of SU(2, C).
In particular, we obtain for the action of SO(4, R) on a Wigner polynomial Equation (9):
The expression in the last line is the matrix element of the irreducible representation D(j,j)(gl, gr) of SO(4, R) for the pair (gl, gr) ∈ SUl(2, C) × SUr(2, C). The degree 2j stays fixed under the action of SO(4, R), while the pairs (m1, m2) take (2j + 1)2 values.
The actions by conjugation Equation (16) of the subgroup SU(2, C)C reduce into irreducible form upon transforming the Wigner polynomial basis; compare also [15], with Wigner coefficients of SU(2, C) [11] (pp. 31–52), into a spherical basis by:
Equation (20) implies that the irreducible representation D(j,j) of SU(4, R) when reduced to the subgroup SU(2, C)C contains any irreducible representation Dl of SU(2, C)C once and only once for l = 0, …, 2j. The transformation inverse to Equation (20) is:
The two transformations Equations (20) and (21) will play a crucial role in the recursive construction of the harmonic analysis for orbifolds in Section 12.4. In cosmic topology, Section 14, the spherical basis Equation (20) in terms of spherical harmonics is required for the multipole analysis of physical observables, like the CMB radiation. It is given by:
As a result of Equation (20), the conjugation action of SU(2, C)C on the spherical basis becomes:
Summary: The action of the rotation (gl, gr) ∈ SO(4, R) on Wigner polynomials is given by the representation D(j,j)(gl, gr), Equation (18). The rotations (g, g) ∈ SO(3, R) act only on the first three coordinates, and the spherical basis Equation (20) yields the decomposition of Wigner polynomials into irreducible subbases characterized by the multipole order l.
5. Discrete 2D m-Grids
To display the topological selection rules for Wigner polynomials, we concentrate on their discrete labels (m1, m2). Both of them are an integer or half-integer. These labels form an integer plus a half-integer 2D m-grid, both of spacing (±1, ±1), on a 2D plane. From the point of view of representations of SU(2, C), the grid points fix subrepresentations of left and right subgroups U(1). Consider the set of Wigner polynomials as being attached to the grid points (m1, m2). At a given grid point (m1, m2), the labels j of all Wigner polynomials attached to it have the denumerable range j = j0, j0 + 1, …, ∞, j0 = Max(|m1|, |m2|). Conversely, the Wigner polynomials for fixed degree 2j occur with values (m1, m2) on a centered square (|m1|, |m2| ≤ j). In Section 12.2, we shall see that harmonic analysis on topological orbifolds selects Wigner bases on subgrids.
Summary: A denumerable set of Wigner polynomials Dj(u) with the index pair (m1, m2) and degree 2j, j ≥ (|m1|, |m2|) is associated with any single point (m1, m2) of a 2D m-grid.
6. Spherical Coxeter Groups for the Platonic Polyhedra
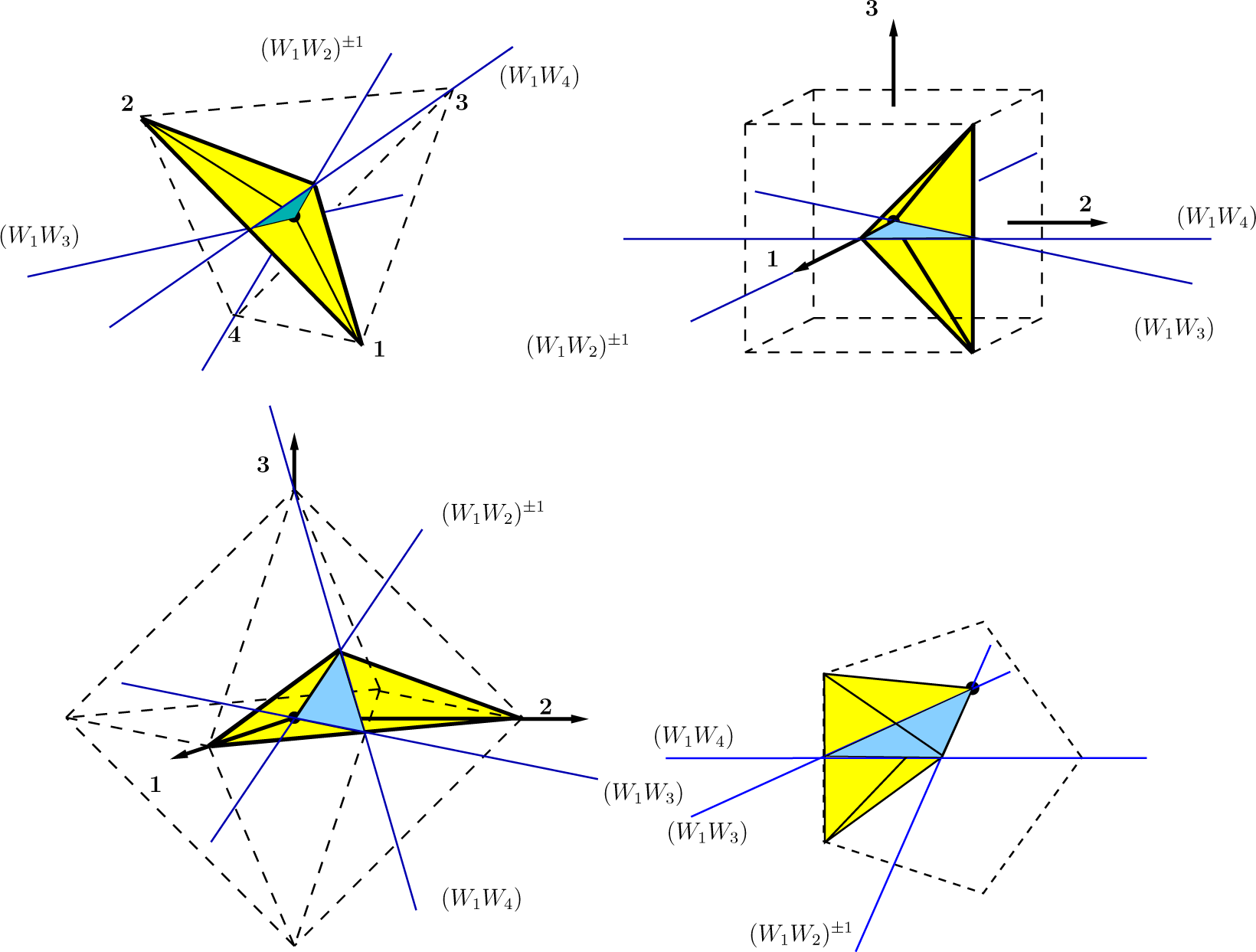
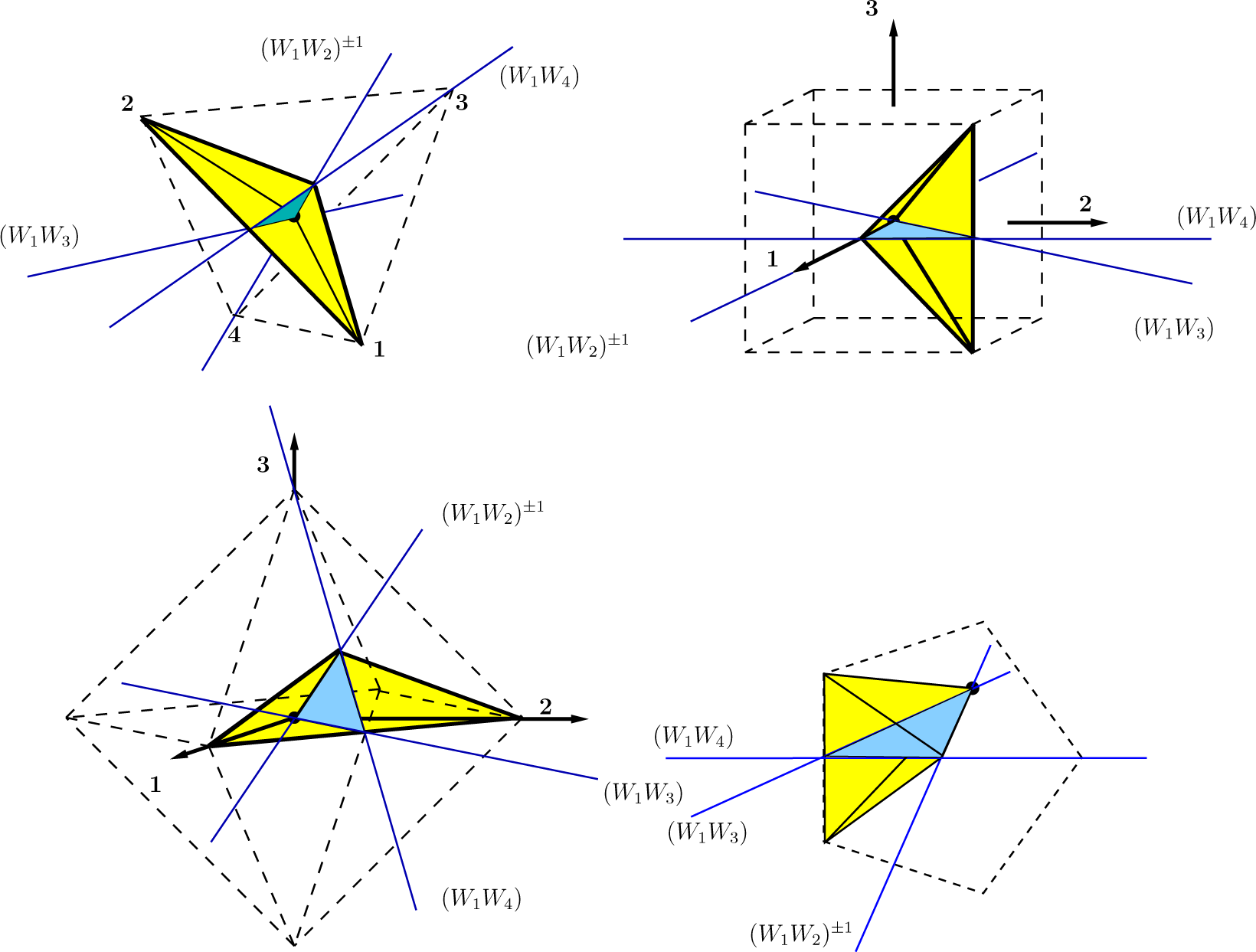
In this section, we turn from the three-sphere to the spherical manifolds of Platonic polyhedra shown in Figure 1. To describe their geometrical transformation properties, we use spherical Coxeter groups. Coxeter groups Γ are generated by Weyl reflections in (hyper-)planes of Euclidean space En. Any Weyl reflection Wa is characterized by a unit vector a, normal to the reflection (hyper-)plane. The action of the Weyl reflection Wa on x ∈ En is given by:
A Weyl reflection is a Euclidean isometry of determinant −1. A Coxeter group Γ is generated by Weyl reflections Wai, i = 1, 2, … For a fixed Coxeter group Γ, we use the short-hand notation Wa1 = Wi. Γ is graphically denoted by a Coxeter diagram, built from circles for each generator and connected by a sequence of lines. The diagram allows one to construct the group Γ from its Weyl reflection generators and their relations (pp. 12–23 in [16] and [17]). The lines between circles carry integer numbers mij. Lines without numbers are short-hand for mij = 3. The number mi,i+1 between two successive reflections Wai, Wai+1 implies the relation:
The number mi,i+1 is the order of the rotation generated by WaiWai+1.
In Tables 1 and 2, we list the four spherical Coxeter groups of the tetrahedron, cube, octahedron and dodecahedron, each with four generators, their diagrams and quadruples of unit vectors a1, …, a4. These Coxeter groups produce tilings [18] of the three-sphere S3 by Platonic polyhedra.
A spherical Coxeter group possesses a fundamental domain. On E4, this is a simplex bounded by the four Weyl reflection planes from the generators of Γ. For the Platonic manifolds, duplex pairs of them are shown in Figure 1.
Summary: Each Platonic spherical polyhedron is linked to one of the four Coxeter groups listed in Tables 1 and 2.
7. The Unimodular Subgroups SΓ
Any element of a Coxeter group from Tables 1 and 2 containing an even number of reflections is a rotation. For topology, we need these rotations, since they preserve orientation. Their 4 × 4 representations on E4 are unimodular with determinant one. The subgroup of a Coxeter group Γ generated by all rotations has unimodular matrix representations, and we denote it by SΓ. This subgroup for all four Coxeter groups in Table 1 is generated in each case by the three products ((W1W2), (W2W3), (W3W4)) of Weyl reflections.
We wish to pass from a product (WaWb) of two Weyl reflection operators to the standard form Equation (18) of SO(4, R) with two SU(2, C) group parameters (gl, gr). First, we determine from the unit reflection vectors a, b two unitary matrices v(a), v(b) by use of Equation (2),
Summary: The unimodular subgroup SΓ of a Coxeter group Γ is generated by products (WaWb), a ≠ b of pairs of Weyl reflection operators. Any such product can be converted by Equations (27) and (28) into a rotation operator with parameters (gl, gr).
8. Homotopy with Spherical Polyhedra
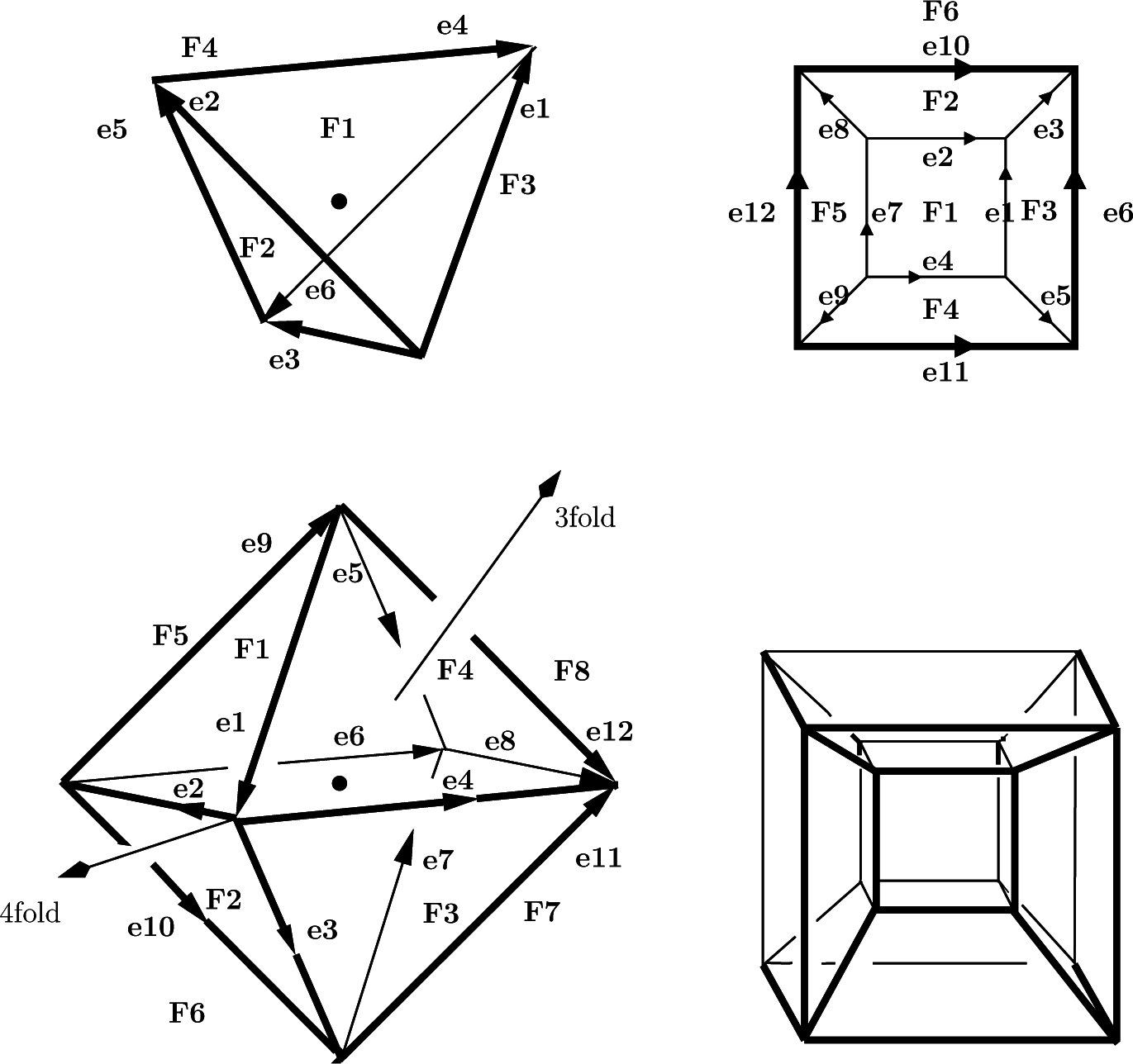
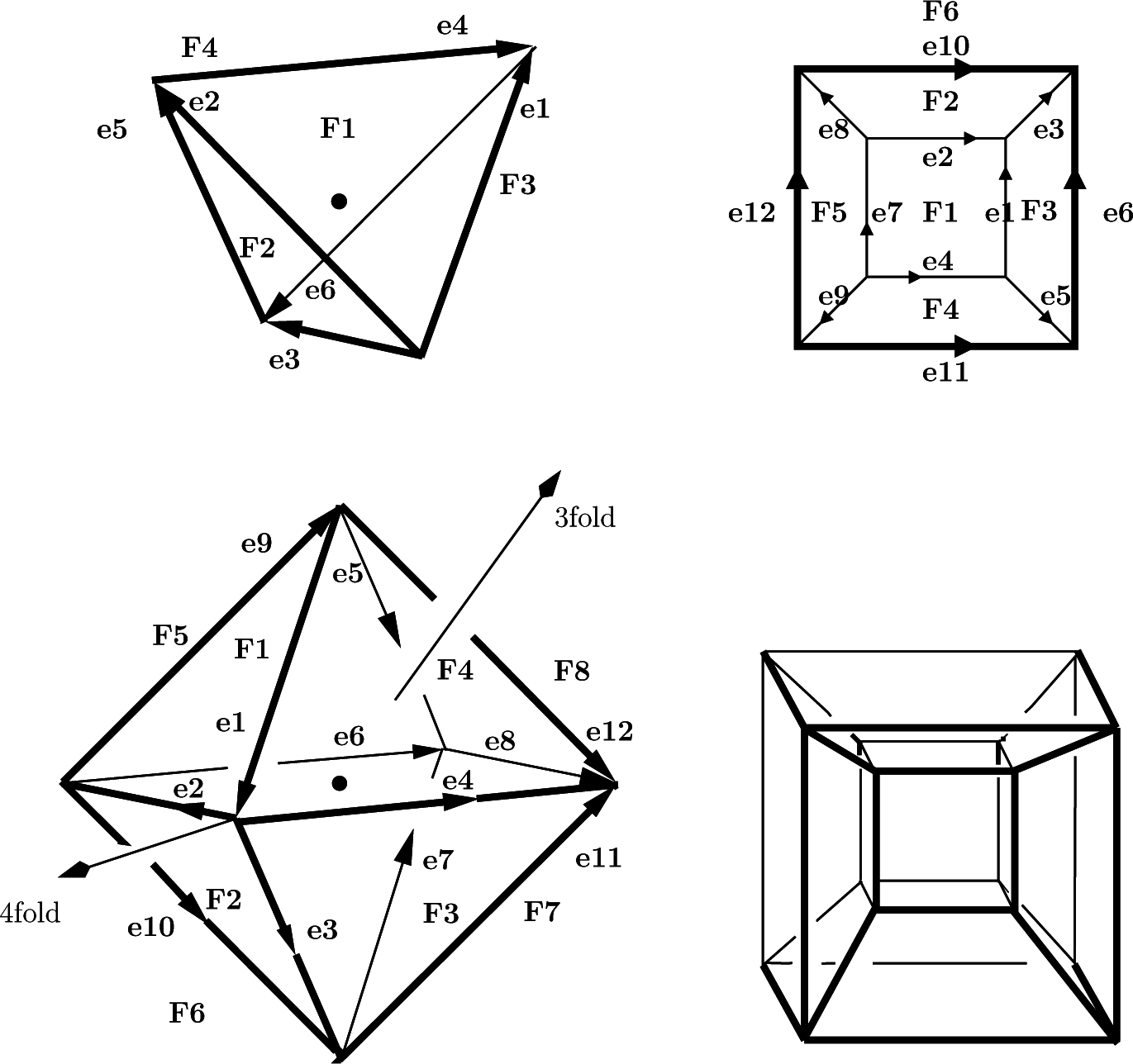
There are five spherical Platonic polyhedra. Everitt in [4] applied Sim’s low index subgroups algorithm to determine all possible homotopies of these polyhedra. His results are given in the form of diagrams for numbered faces and edges and identification of pairs of faces and edges. The identification is also referred to as gluings and by construction encodes the first homotopy or fundamental group.
We prefer to list the gluings of faces and edges, enumerated in line with Everitt [4] and shown in Figure 2. Note that a given spherical polyhedron may have several different inequivalent homotopy groups. As standard examples, we take the cubic spherical manifolds [21]. This manifold admits two inequivalent homotopies, which we denote as N2, N3. We depict the polyhedra in an Euclidean fashion. For the cube, an enumeration of the six faces F i, i = 1, …, 6 and twelve directed edges 1, …, 12 following Everitt [4] is shown in Figure 2. Any square face is characterized by a directed sequence of four edges. Any homotopic gluings of faces plus edges is a map between two such sequences. As an example, we illustrate a gluing F 1 ∪ F 3 in N2 as a map from right to left,
From [4], we find for the first cubic homotopy group N2 the pairwise face gluings:
The glued directed edges are listed on single lines in the diagram given in Table 3.
Summary: All possible homotopies for the Platonic spherical polyhedra are determined and listed in Table 3 in accord with [4].
9. Synopsis of Platonic Homotopies
The enumeration of faces and directed edges of the Platonic polyhedra is shown in Figure 2. In Table 3, we list the gluing of faces and directed edges as given in [4].
10. From Homotopies to Deck Actions on S3
Homotopic gluings relate faces and edges of a single polyhedron. A new geometric view of topologies emerges on the universal covering manifold S3. A general theorem, given by Seifert and Threlfall [5] (pp. 181–203), proves for topological manifolds the isomorphism between the first homotopy group and the group of deck or covering actions on the universal cover.
We implement this theorem for the cubic spherical manifold N2 and convert its homotopic gluings from Table 3 into deck actions between neighboring copies of a single proto-cube with fixed face and edge enumeration. The deck rotations, which generate the tiling of S3, form the topological deck group. The eight cubic copies tile the three-sphere in the form of the eight-cell shown in Figure 2 in a projection from [18] (p. 170). This means that the topological deck group must be of order eight.
For the homotopy of N2, we make full use of the prescriptions of Table 3. Any quadratic face of the proto-cube is surrounded by four directed edges given in Figure 2. These four directed edges in turn determine the face and, moreover, give its orientation with respect to a four-fold axis perpendicular to the face.
We use square diagrams as given in Equation (31), formed from four directed edges, to denote edges around a face plus their orientation. This orientation must be respected in the homotopic gluing of faces and their edges given in Table 3.
It suffices to convert only the homotopic face gluings of a proto-cube, the glue generators, into deck actions. Then, these deck actions by multiplication generate the full deck group.
In E3, we choose the coordinates (x1, x2, x3) normal to the three faces labeled F 1, F 3, F 2 in Figure 2. Positive rotations by an angle ϕ around these normals we denote as Ri(ϕ), i = 1, 2, 3.
Before turning to the manifold N2 in Equation (32), we first treat in Equation (31) a simple reference glue F1 ∪ F6 of two opposite faces of the proto-cube. We convert this glue into a deck action of two copies of the proto-cube and write it algebraically in Equation (31) as a product of Weyl reflections and inversions. By , , we denote the inversions in E3, E4. We find this action in the form:
The product of Weyl reflections and inversions in Equation (31) combines into an overall unimodular rotation matrix. For convenience, we introduced the additional Weyl reflection operator W0, a0 = (0, 0, 0, 1).
Now, we return to the cubic manifold N2. By use of two rotations, we convert its first face gluing, st(1 ⇐ 3) : F1 ∪ F3, into the reference deck action Equation (31),
By similar conjugations as in Equation (31), we convert the two other face gluings of the manifold N2 in Equation (30) into deck actions,
From products of two Weyl reflection operators in Equation (33), we pass to elements (gl, gr) ∈ SO(4, R) given in Table 2 by Equation (28). As shown in [22], the deck generator in Equation (32) generates a cyclic group C8 of order eight, which paves the eight-cell tiling of S3 by copies of the prototile.
The eight-cell admits a second inequivalent cubic homotopy N3 [4]. Its deck group derived in [22] is the quaternion group Q. We give the generating elements in Equation (48).
For the other Platonic homotopies studied by Everitt [4], the conversions to deck actions are carried out in [20–23].
Summary: The homotopic gluings for Platonic polyhedra from [4] are listed in Table 3. We convert them into actions of deck groups H on the covering three-sphere. They generate tilings by |H| tiles of the covering three-sphere.
11. From Point Symmetry to Orbifolds
The spherical Platonic polyhedra cover the three-sphere by deck transformations. By use of its point symmetry group M, we can decompose a single Platonic polyhedron under M into a fundamental domain and its orbit. We must remove two obstacles towards a topological interpretation:
To keep the orientation under deck actions, we restrict the point group M to proper rotations. For the Coxeter group action, its fundamental domain is a simplex bounded by four Weyl reflection planes. When we restrict to rotations to preserve orientation, the actions belong to the unimodular subgroup of Γ of determinant one, which we denote as SΓ. When passing to SΓ, we must extend the fundamental simplex domain of Γ for SΓ to a duplex, consisting of a simplex and its image under a reflection, see Figure 1.
A topological manifold strictly excludes fixpoints under deck actions. Here, they appear on the rotation axes of the point groups. We must extend our topological notion from a manifold to an orbifold [7,9], which allows for fixpoints of finite order. The notion of orbifolds is explained in more detail in [8] (pp. 652–714). In Figure 1, we give the construction of orbifolds by gluing pairs of Coxeter simplices into duplices for the four Platonic polyhedra. The fixpoints appear on the edges of the blue glue triangles for the two Coxeter simplices.
To cover the full three-sphere by orbifolds, we proceed in two steps. First of all, any Platonic polyhedron under its rotational point symmetry group M is paved by |M| copies of spherical orbifolds. These spherical orbifolds we take as duplices glued from a Coxeter simplex and its mirror image. Copies of the duplices shown in Figure 1 under the point group M tile the Platonic polyhedra, but have fixpoints on their edges. To cover the full three-sphere, we augment the rotational point symmetry group M by the operations of the full deck group H of the Platonic manifold. These two groups share only the identity element, M ∩ H = e. The product M · H of point and deck operations m ∈ M, h ∈ H, acting on a proto-orbifold, generates as the deck group the unimodular subgroup M · H = SΓ of the Coxeter group. The images of the proto-duplex under all of these products cover the three-sphere.
Summary: The topological orbifolds for Platonic spherical polyhedra are duplices (Figure 1), glued from two Coxeter simplices. Their deck groups are the unimodular subgroups SΓ ∈ Γ. Each orbifold deck group is factorized as SΓ = M · H, M ∩ H = e, into the point symmetry group M and the deck group H for the Platonic polyhedron.
12. Harmonic Analysis for Orbifolds
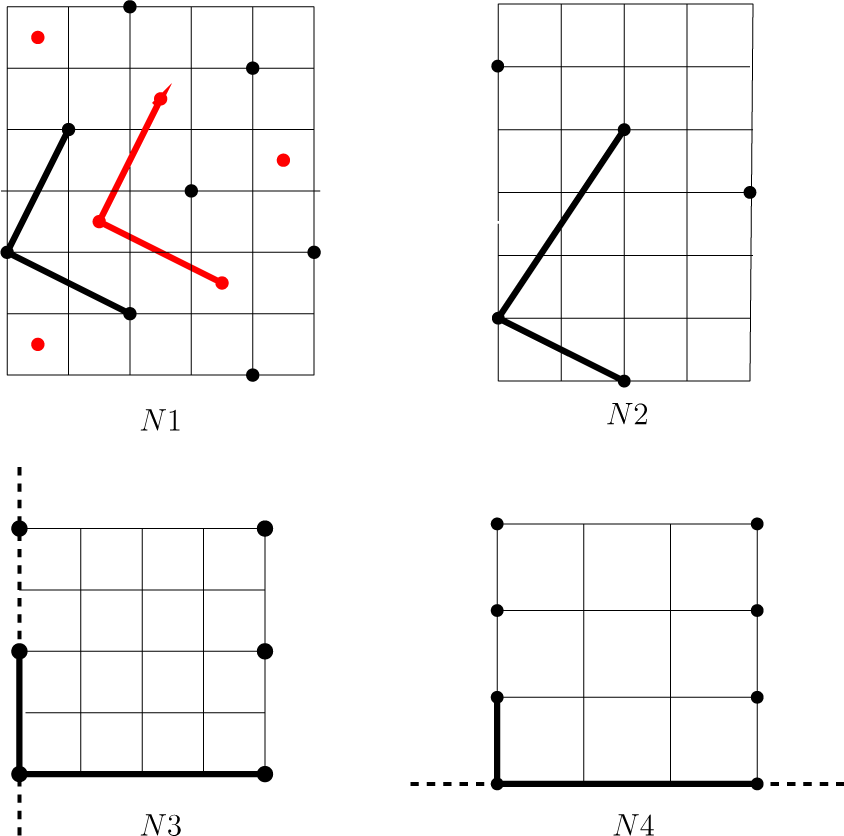
As the general basis for all of these topologies, we take the harmonic Wigner polynomials. To adapt them to specific orbifolds, we shall present in the following subsections different routes. By graphical means, we shall illuminate on 2D m-subgrids; see Figure 3, denumerable sets of Wigner polynomials for orbifolds, selected from the full harmonic set on the three-sphere. More details of the harmonic analysis on the Platonic orbifolds are given in Section 13.
12.1. Rotation to the Diagonal Form
The unitary structure of the three-sphere allows one to reduce any given deck action to a pure phase transformation. A general rotation operator T(gl,gr), (gl, gr) ∈ SO(4, R) can be brought to a simple form by unitary diagonalizations of the matrices (gl, gr),
To find the angular parameters α, γ of the diagonal form, one can avoid the explicit diagonalization Equation (34). For any u ∈ SU(2, C), use the trace relation:
We now pass from u(x) to a new matrix by the SO(4, R) rotation:
The matrix represents a new system of coordinates on S3. It follows from Equation (34) that to the action of T(gl,gr) on the coordinates u(x), there corresponds the action T(δl,δr) on the coordinates . If we pass in a Wigner polynomial from the coordinates to Euler angles, we find in this parametrization:
Summary: Any deck action on Wigner polynomials by a rotation can be converted into a pure phase transformation Equation (37). Any deck group with a single-generator can be treated in this way.
12.2. Selection on m-Subgrids
The harmonic analysis must be restricted to the modes admissible for a specific spherical topology. A denumerable set of Wigner polynomials Dj(u) with the index pair (m1, m2) and degree 2j, j ≥ (|m1|, |m2|) is achieved by choosing from the harmonic Wigner basis a subbasis invariant under the relevant point and deck group. Since all deck actions are of finite order, the angles α, γ in Equation (37) must be integral fractions of 2π of the forms For groups with a single generator, rewrite Equation (38) in the form:
The solutions (m1, m2) = (p2, p1) of Equation (39) for ν = 0 form integer multiples of a grid vector a1 = (p2, p1). Solutions of Equation (39) for ν ≠ 0 are on lines parallel to a1. We choose a second vector a2 = (q1, q2) to a grid point outside, but next to the line spanned by a1. Then, the vectors (a1, a2) form the basis of an m-subgrid, whose points yield all solutions of Equations (38) and (39). This case applies to the orbifolds N1 and N2 with cyclic deck groups C5, C8. In Figure 3, we mark the subgrids for the orbifolds N1, N2, N3, N4.
Note that the topological rules Equation (39), given in terms of subgrids, select enumerable sets of harmonic Widner basis polynomials of unrestricted degree 2j.
12.3. Mirror Extension of m-Grids
The subgrid method can be extended to orbifolds when at most two Wigner polynomials with index pairs [(m1, m2), (−m1, m2)] or [(m1, m2), (m1, −m2)] linearly combine into an invariant basis polynomial. We call these two cases vertical and horizontal mirror pairs. It then suffices to mark one partner of this pair and to give the algebraic phase for its partner. These cases apply for the orbifolds N2 and N3, illustrated in Figure 3.
12.4. Projection of Harmonic Bases
For more general deck groups, we establish the identity representation by application to a Wigner polynomial Dj of degree 2j the projection operator P 0 Equation (40) to the identity representation of the deck group H,
By Equation (18), this application produces for any degree 2j a linear combination of Wigner polynomials. If this can be normalized, it contributes to the harmonic analysis. For Platonic spherical manifolds, these projections were carried out in [22]. In many cases, it is possible to display the results of the projection Equation (40) on an m-subgrid: the non-vanishing Wigner polynomials selected by projection are located on a subgrid, dependent on the manifold, and spanned by two specific grid vectors (a1, a2). We display subgrids in Figure 3. The advantage of the subgrid method is that different topologies can be directly compared in terms of their subgrids.
Summary: The Wigner polynomials invariant under a single-generator deck group are located on a subgrid spanned by two grid vectors (a1, a2). Any subgrid point (m1, m2) stands for an enumerable set of invariant Wigner polynomials of degree j = j0 + ν, j0 = max(|m1|, |m2|). The spherical manifolds N1, N2 with cyclic deck groups C5, C8 belong to this set.
12.5. Algebraic Bases from Point Symmetry
The basis of the harmonic analysis for a specific topology can be recursively computed, as we shall show. We have seen that the deck group of the orbifold factorizes into the symmetry group M of the Platonic manifold and its deck group H. The basis functions for the harmonic analysis must be invariant under the deck group M · H, which is possible only if they are invariant under both M and H. The two projectors for the groups M and H commute [24].
We start for the cubic orbifold N3 the first loop of a recursive construction of basis functions of increasing degree 2j:
The action of symmetry groups M = O of the Platonic manifolds is known from the Euclidean setting in E3. The point group O is a subgroup of the rotation group SO(3, R); therefore, any M-invariants must appear for fixed l as linear combinations of spherical harmonics . Standard spherical harmonics with lowest label l = l0 and invariant under O can be found in [25] (pp. 436–438) for the cubic group and in [26] (pp. 105–114). For several point groups M, the onset l0 of spherical harmonics invariant under M is listed in [10], Table 3. The linear combinations of lowest l = l0 can be expressed in the spherical basis Equation (20) of SO(4, R). For the cubic point group O, the lowest linear combination of spherical harmonics given in Table 4 has l0 = 4.
To also project on an invariant under H, which is H = Q for the orbifold N3, we transform with Equation (21) from the spherical basis back to the Wigner basis and then apply the projector Equation (40) with the matrix element:
Once the result of (ii) is transformed back into the spherical basis with Equation (20), we recover linear combinations with new values of multipole order l > l0, which, if non-vanishing, can be normalized. These new states must still be invariant under the point group M. It follows that they must contain M-invariant linear combination of spherical harmonics with l > l0. For the cubic point group O, we demonstrate this result in Table 4 with new cubic invariants for l = 6 and l = 8.
With them, we enter the next loop with Steps (i) and (ii) in search of new invariant basis functions for the deck group Q ×s O. This recursive method uses only well-known Wigner coefficients of SU(2, C), but avoids any new projection to invariants under M. The new basis functions in Table 5 contain linear combinations of different multipole orders l = 4, 6, 8. This implies that topology can enforce linear correlations between amplitudes of different multipole order, which has important implications for the analysis of the cosmic microwave background.
In Table 5, we exemplify the first basis functions for the cubic orbifold N3.
Summary: The recursive method, by use of loops with Steps (i) and (ii), yields a basis of the harmonic analysis of any Platonic orbifold. Invariance under a topological deck group will imply in general the correlation between multipoles of different orders (l, l′).
13. Synopsis of Harmonic Bases for Platonic Orbifolds
Depending on the orbifold, we apply one of the methods given in the previous section to derive the basis of each Platonic orbifold.
13.1. The Tetrahedral Orbifold N1
The deck group of N1 from [22] is the cyclic group H = C5 of order five. Its single generator is the rotation:
Equation (42) demonstrates that the entanglement of left and right actions in the group C5 is enforced by the geometry of the tetrahedron.
We follow Section 3 and replace the old coordinates u(x) by the new ones . By the trace relation Equation (35) for (gl, gr), we find the diagonal forms:
To project a basis state invariant under C5, it suffices to make it invariant under the generator Equation (42) of C5, since then, it will be invariant under any power of this generator. We choose a fixed Wigner polynomial and find in the coordinates as action the phase transformation:
To have invariance under the generator of C5, we require:
This condition is fulfilled on the subgrid points marked in Figure 3, N1 by black and by red circles. The subgrids are spanned by the black vectors a1 = (2, −1), a2 = (1, 2) from an integer or by the same red vectors from a half-integer grid point. The subgrid points form a selection from all grid points. The subbasis consists of all Wigner polynomials associated with the subgrid points.
13.2. The Cubic Manifold N2
The deck group is C8 generated by:
Again, the left and right actions are entangled.
The subbasis of the harmonic analysis is of the horizontal mirror type (see Section 12.3) given by the linear combination of two Wigner polynomials:
13.3. The Cubic Manifold N3
The deck group is the quaternionic group Q, acting from the left, with elements:
The subbasis is of vertical mirror type, given by a linear combination of two Wigner polynomials:
13.4. The Octahedral Manifolds N4, N5, N6
The deck groups here are of the order 48. We give the basis construction to the orbifold N4 with deck group acting from the left and from the right, respectively. For the subbasis in new coordinates , we find a horizontal mirror symmetry and, from [10] (p. 26), the following polynomials and mirror phases:
The octahedral manifolds N5, N6 are analyzed in [10].
13.5. The Dodecahedral Manifold N9
An analysis of invariant polynomials on Poincaré’s dodecahedral manifold is given in [2], based on the work of Klein [3].
14. Topology of Multiply-Connected Universes
As an application of the derived subbases, we consider the observable effects of multiply-connected universes. The topology of the cosmos has its roots in Albert Einstein’s work [27]. In 1917, Einstein presented his pioneering paper on general relativity, cosmology and gravitation [1] (pp. 160–164). He communicates three fundamental ideas:
Space-time manifold and metric: Space and time are unified into a single 4D space-time manifold, with three space coordinates (x1, x2, x3) and one time coordinate x0 = ct. Following Riemann, this four-manifold carries a pseudo-Euclidean metric with the space-time squared distance:
In the second line, we adopt the usual splitting into time and space. Space-time by Equation (52) is distinct from E4 used in previous sections.
Gravity and geodesics: Einstein gives field equations for Newton’s gravity. They link the second derivatives of the metric tensor gµν(x0, x1, x2, x3) with respect to the coordinates xµ linearly to the energy-momentum tensor Tσρ(x0, x1, x2, x3). Geodesics, the shortest lines allowed by the metric Equation (52), are the lines followed by massive test particles. For velocities small compared with the velocity c of light, Einstein’s field equations reduce to Newton’s laws for the gravitational potential in the presence of masses and the differential equations for geodesics to Newton’s equations of motion. In general, the metric and the energy-momentum tensor with Einstein become observables of astrophysics.
Topology: The connectivity of the space-time manifold is the subject of cosmic topology. The classes of possible closed paths are the basic concept of homotopy. The view of space-time as a manifold, with gravitation obtained from local differential equations, presents topology as an observable.
When time is split off as in Equation (52), homotopy refers to the 3D space part of space-time. In cosmology, three possible curvatures of the universe are distinguished: hyperbolic space with negative, Euclidean space with zero and spherical space with positive average curvature. The present astrophysical data favor positive curvature and, hence, a spherical spatial topology, as discussed here. One important observable is the spatial fluctuations of the cosmic microwave background.
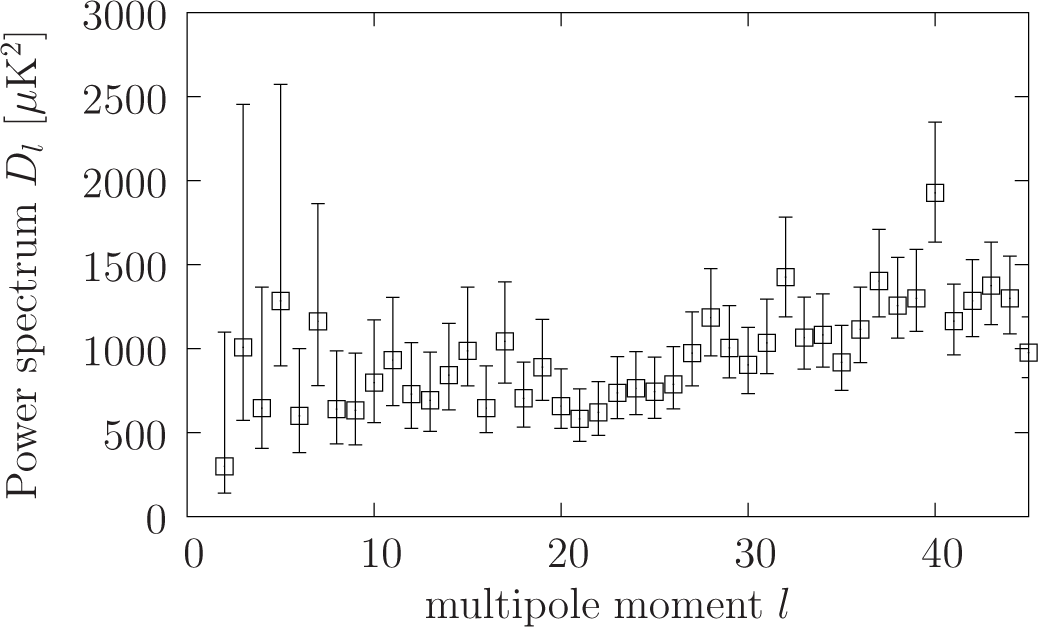
The cosmic microwave background (CMB) is an observed uniform thermal black-body radiation of a present temperature of 2.725 Kelvin with a peak frequency of 160.2 GHz, discovered in 1964 by A. Penzias and R. Wilson [28]. According to big bang cosmology, its origin is dated back to the early epoch of photon decoupling, when neutral atoms were formed at very high density and temperature. Its amplitude today is observed by the Wilkinson probe and up to 2013 by the Planck satellite [29]. After a non-trivial cleaning of the measured temperature for global astrophysical influences, such as the Wolfe–Sachs effect and the local foreground of the solar system and our galaxy, the CMB spatial temperature fluctuations are expanded in multipoles, shown for the lowest values of l in Figure 4.
The connection of multipole-resolved CMB measurements to cosmic topology is provided by selection rules for the harmonic analysis. The different topologies discussed here should imprint their selection rules on the multipole amplitudes of the CMB. The cubic spherical manifold N2 discussed here has been used for detailed predictions of the CMB temperature fluctuation map [30]. In addition, the ratio of different multipole-moments encodes the specific topology; see Table 5 for the cubic case.
Both topological signatures can be revealed with the methods given here, which yields regular tilings of the three-sphere. According to [29], Section 9.3 on p. 36, the observed low amplitudes and correlations of the first CMB multipoles (Figure 4) might indicate a violation of statistical isotropy or might indicate the presence of topological selection rules.
Besides regular tilings, also random tilings of spherical three-manifolds have been analyzed in the literature [31].
15. Conclusions
We have constructed the orthonormal basis sets for four Platonic spherical topological orbifolds, required for performing a harmonic analysis on specific topologies. The mathematical framework used starts from the homotopy or fundamental groups and yields isomorphic deck actions and deck groups on the three-sphere. The point symmetry groups M of the Platonic manifolds lead from manifolds to orbifolds. The orthonormal Wigner polynomials provide a basis for the harmonic analysis on SU(2, C). By deriving the subgrid of each Platonic manifold on the space spanned by the indices of the Wigner polynomials, we obtain selection rules for the harmonic analysis. Moreover, the coefficients of the multipole expansion encode the underlying topology.
In contrast to other approaches, no numerical orthogonalization of basis sets is required, and the connection between topology and geometry of space is transparent from the introduction of the homotopies. Finally, we discussed the harmonic analysis of the CMB and present signatures of the underlying topology of multiply-connected universes encoded in the CMB fluctuations.
Conflicts of Interest
The author declares no conflict of interest.
References
- Einstein, A. Kosmologische Betrachtungen zur allgemeinen Relativitätstheorie. In Sitzungsberichte der Königlich Preußischen Akademie der Wissenschaften (Berlin); Prussian Academy of Sciences: Berlin, Germany, 1917; pp. 142–152. [Google Scholar]
- Kramer, P. An invariant operator due to F Klein quantizes H Poincaré’s dodecahedral 3-manifold. J. Phys. A Math. Gen. 2005, 38. [Google Scholar] [CrossRef]
- Klein, F. Vorlesungen Über das Ikosaeder; Birkhäuser: Basel, Switzerland, 1993. [Google Scholar]
- Everitt, B. 3-Manifolds from Platonic solids. Topol. Appl. 2004, 138, 253–263. [Google Scholar]
- Seifert, H.; Threlfall, W. Lehrbuch der Topologie; Chelsea Reprint: New York, NY, USA, 1934. [Google Scholar]
- Wolf, J.A. Spaces of Constant Curvature\, 5th ed; Publish or Perish: Wilmington, DE, USA, 1984. [Google Scholar]
- Thurston, W.P. Three-Dimensional Geometry and Topology; Princeton University Press: Princeton, NJ, USA, 1997. [Google Scholar]
- Ratcliffe, J.G. Foundations of Hyperbolic Manifolds; Springer: Berlin, Germany, 1994. [Google Scholar]
- Montesinos, J.M. Classical Tesselations and Three-Manifolds; Springer: Berlin, Germany, 1987. [Google Scholar]
- Kramer, P. Platonic topology and CMB fluctuations: Homotopy, anisotropy and multipole selection rules. Class. Quant. Grav. 2010, 27. [Google Scholar] [CrossRef]
- Edmonds, A.R. Angular Momentum in Quantum Mechanics; Princeton University Press: Princeton, NJ, USA, 1957. [Google Scholar]
- Wigner, E.P. Group Theory and Its Application to the Quantum Mechanics of Atomic Spectra; Wiley: New York, NY, USA, 1959. [Google Scholar]
- Bargmann, V. Group representations on Hilbert spaces of analytic functions. In Analytic Methods in Mathematical Physics; Gordon and Breach: New York, NY, USA, 1968. [Google Scholar]
- Levin, J. Topology and the cosmic microwave background. Phys. Rep. 2002, 365, 251–333. [Google Scholar]
- Aurich, R.; Janzer, H.S.; Lustig, S.; Steiner, F. Do we live in a ‘small universe’? Class. Quant. Grav. 2008, 25. [Google Scholar] [CrossRef]
- Magnus, W.; Karrass, A.; Solitar, D. Combinatorial Group Theory; Dover: New York, NY, USA, 1966. [Google Scholar]
- Humphreys, J.E. Reflection Groups and Coxeter Groups; Cambridge University Press: Cambridge, UK, 1990. [Google Scholar]
- Sommerville, D.M.Y. An Introduction to the Geometry of N Dimensions; Dover: New York, NY, USA, 1958. [Google Scholar]
- Coxeter, H.S.M.; Moser, W.O.J. Generators and Relations for Discrete Groups; Springer: New York, NY, USA, 1965. [Google Scholar]
- Kramer, P. Platonic polyhedra tune the 3-sphere: Harmonic analysis on simplices. Phys. Scr. 2009, 79. [Google Scholar] [CrossRef]
- Kramer, P. Platonic polyhedra tune the three-sphere: II. Harmonic analysis on cubic spherical three-manifolds. Phys. Scr. 2009, 80. [Google Scholar] [CrossRef]
- Kramer, P. Platonic polyhedra tune the three-sphere: III. Harmonic analysis on octahedral spherical three-manifolds. Phys. Scr. 2010, 81. [Google Scholar] [CrossRef]
- Kramer, P. Corrigendum: Platonic polyhedra tune the 3-sphere: Harmonic analysis on simplices. Phys. Scr. 2010, 81. [Google Scholar] [CrossRef]
- Kramer, P. Multipole analysis in cosmic topology. In Symmetries in Nature: Symposium in Memoriam Marcos Moshinsky; American Institute of Physics (AIP) Publishing: College Park, MD, USA, 2010; Volume 1323, pp. 164–177. [Google Scholar]
- Lax, M. Symmetry Principles in Solid State and Molecular Physics; Wiley: New York, NY, USA, 1974. [Google Scholar]
- Knox, R.S.; Gold, A. Symmetry in the Solid State; W.A. Benjamin: New York, NY, USA, 1964. [Google Scholar]
- Luminet, J.P. Cosmic topology: Twenty years after. Gravit. Cosmol. 2014, 20, 18–20. [Google Scholar]
- Penzias, A.A.; Wilson, R. Measurement of excess antenna temperature at 4080 Mc/s. Astrophysical Journal 1965, 142, 419–421. [Google Scholar]
- Planck Collaboration. Planck 2013 results. XV. CMB power spectra and likelihood. Astron. Astrophys. 2013, 571, A15.
- Aurich, R.; Kramer, P.; Lustig, S. Cosmic microwave background radiation in an inhomogeneous spherical space. Phys. Scr. 2011, 84. [Google Scholar] [CrossRef]
- Escudero, J.G. Random tilings of spherical 3-manifolds. J. Geom. Phys. 2008, 58, 1451–1464. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coxeter Diagram Γ | |Γ| | Polyhedron | H = deck | |H| | Reference |
|---|---|---|---|---|---|
| ○ − ○ − ○ − ○ | 120 | tetrahedron N1 | C5 | 5 | [20] |
| 384 | cube N2 | C8 | 8 | [21] | |
| cube N3 | Q | 8 | [21] | ||
| 1152 | octahedron N4 | C3 × Q | 24 | [10] | |
| octahedron N5 | B | 24 | [10] | ||
| octahedron N6 | 24 | [10] | |||
| 120 · 120 | dodecahedron N9 | 120 | [2] | ||
| Γ | a1 | a2 | a3 | a4 |
|---|---|---|---|---|
| ○ − ○ − ○ − ○ | (0, 0, 0, 1) | |||
| (0, 0, 0, 1) | ||||
| (0, 0, 0, 1) | ||||
| (0, 0, 1, 0) |
| Polyhedron | Face Glue | Edge Glue |
|---|---|---|
| Tetrahedron N1 | F3 ∪ F1, F2 ∪ F4 | |
| Cube N2 | F3 ∪ F1, F4 ∪ F2, F6 ∪ F3 | |
| Cube N3 | F1 ∪ F6, F2 ∪ F4, F3 ∪ F5 | |
| Octahedron N4 | F6 ∪ F2, F5 ∪ F3, F1 ∪ F4, F7 ∪ F8 | |
| Octahedron N5 | F6 ∪ F8, F1 ∪ F4, F2 ∪ F7, F3 ∪ F5 | |
| Octahedron N6 | F6 ∪ F4, F5 ∪ F3, F8 ∪ F2, F7 ∪ F1 |
| l | |
|---|---|
| 0 | |
| 4 | |
| 6 | |
| 8 | |
| 2j | l | |
|---|---|---|
| 0 | 0 | |
| 4 | 0, 4 | |
| 6 | 0, 4, 6 | |
| 8 | 0, 4, 6, 8 | |
© 2015 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kramer, P. Topology of Platonic Spherical Manifolds: From Homotopy to Harmonic Analysis. Symmetry 2015, 7, 305-326. https://doi.org/10.3390/sym7020305
Kramer P. Topology of Platonic Spherical Manifolds: From Homotopy to Harmonic Analysis. Symmetry. 2015; 7(2):305-326. https://doi.org/10.3390/sym7020305
Chicago/Turabian StyleKramer, Peter. 2015. "Topology of Platonic Spherical Manifolds: From Homotopy to Harmonic Analysis" Symmetry 7, no. 2: 305-326. https://doi.org/10.3390/sym7020305