Design and Modeling of an Adaptively Controlled Rainwater Harvesting System


1
Geosyntec Consultants, 1330 Beacon Street, Suite 317, Brookline, MA 02446, USA
2
Department of Civil Engineering and Engineering Mechanics, Columbia University, 500 West 120th Street, 610 Mudd, New York, NY 10027, USA
*
Author to whom correspondence should be addressed.
Water 2017, 9(12), 974; https://doi.org/10.3390/w9120974
Submission received: 26 September 2017
/
Revised: 28 November 2017
/
Accepted: 7 December 2017
/
Published: 14 December 2017
(This article belongs to the Special Issue Advances on Urban Stormwater Harvesting Strategies)
Abstract
:Management of urban stormwater to mitigate Combined Sewer Overflows (CSOs) is a priority for many cities; yet, few truly innovative approaches have been proposed to address the problem. Recent advances in information technology are now, however, providing cost-effective opportunities to achieve better performance of conventional stormwater infrastructure through a Continuous Monitoring and Adaptive Control (CMAC) approach. The primary objective of this study was to demonstrate that a CMAC approach can be applied to a conventional rainwater harvesting system in New York City to improve performance by minimizing discharge to the combined sewer during rainfall events, reducing water use for irrigation of local vegetation, and optimizing vegetation health. To achieve this objective, a hydrologic and hydraulic model was developed for a planned and designed rainwater harvesting system to explore multiple potential scenarios prior to the system’s actual construction. Model results indicate that the CMAC rainwater harvesting system is expected to provide significant performance improvements over conventional rainwater harvesting systems. The CMAC system is expected to capture and retain 76.6% of roof runoff per year on average, as compared to just 14.8% and 41.3% for conventional moisture and timer based systems, respectively. Similarly, the CMAC system is expected to use 81.4% and 18.0% less harvested rainwater than conventional moisture and timer based irrigation approaches, respectively. The flexibility of the CMAC approach to meet competing objectives is promising for widespread implementation in New York City and other heavily urbanized areas challenged by stormwater management issues.
1. Introduction
Discharge of wastewater, sewage, and stormwater runoff from coastal cities remains the dominant source of coastal zone pollution [1]. The impervious nature of modern cities is exacerbating this problem by increasing runoff from city surfaces, triggering Combined Sewer Overflows (CSOs) and intensifying urban flooding. Management of urban stormwater to mitigate CSOs is a priority for many cities; however, few truly innovative approaches have been proposed to address this widespread problem. For example, conventional rainwater harvesting systems are widely used throughout urbanized areas in the United States for water conservation, but typically overflow during rainfall events and provide minimal reduction of runoff [2].
Recent advances in information technology infrastructure, as well as hardware and software solutions, collectively known as the Internet of Things (IoT), are now providing cost-effective opportunities to achieve better performance of stormwater infrastructure. IoT is a network of physical objects embedded with electronics, software, sensors, and network connectivity, which enables these objects to collect and exchange data [3]. In the context of stormwater management, IoT can be applied to provide Continuous Monitoring and Adaptive Control (CMAC) of traditionally static stormwater facilities [4]. The CMAC approach aggregates information from on-site sensors (e.g., water level measurements) and weather forecasts, then implements custom logic based on these data sources to make automated decisions about when and how to store or release water collected from sites incorporating stormwater infrastructure. The intent of this approach is to optimize stormwater infrastructure to meet specific site objectives, including minimization of stormwater runoff, water conservation, and water quality enhancements.
An example application of CMAC would involve opening a valve to drain a cistern prior to forecast rainfall to create additional storage for incoming runoff and, therefore, minimize outflows during periods of active rainfall. Many types of infrastructure can be optimized by CMAC, including bioretention cells, cisterns, wet ponds, dry ponds, green roofs, and site connection tanks. Previous research has shown that a 59 m3 CMAC system can potentially achieve the same reduction in wet weather flow (i.e., outflows during periods of active rainfall) as a 510 m3 static system. Thus, the CMAC system from this previous research provides the same wet weather performance at 11.5% the size [5].
Field testing of CMAC has demonstrated additional benefits beyond wet weather control. One of the original CMAC applications for water resources research was control of tide gates to enhance restoration of impounded salt marsh vegetation while simultaneously improving flood control protection [6]. A controlled basin in Pflugerville, Texas, achieved a 6-fold reduction in nitrate plus nitrite-nitrogen compared to the same pre-retrofit dry basin (0.66–0.11 mg/L) by extending detention time and releasing water before a storm to create additional storage [7]. Many other studies and field implementation sites demonstrating similar benefits for a variety of goals (e.g., flood control, wet-weather reduction, water quality) have been performed across the county [4,5,8,9].
An advanced rainwater harvesting system (ARHS) that will be operated using CMAC was designed at the St. Mary’s Recreation Center (“the site”), located in the Bronx River sewershed (BRS) of New York City. The ARHS was designed to collect (or harvest) rainwater from the roof of the recreation center and store the water in a cistern for on-site use, including irrigation use. Specifically, the harvested rainwater in the cistern was to be available for irrigation of a grassed area adjacent to a proposed raingarden. The raingarden was designed to collect runoff from an adjacent driveway area in addition to controlled discharge from the cistern. The combined design plans for the ARHS and raingarden were approved by the New York City Department of Buildings (New York, NY, USA) on 28 February 2017 [10]. Figure 1 provides a schematic overview of the system’s design.
As shown in Figure 1, the ARHS is primarily comprised of a cistern with a controlled discharge line, an irrigation pump, and monitoring sensors (e.g., water level, soil moisture, etc.). The ARHS was designed to be connected to a CMAC platform, powered by OptiRTC (Opti, Boston, MA, USA). Opti is a technology company that delivers a cloud-based platform for CMAC of distributed stormwater infrastructure. For the design illustrated in Figure 1, the Opti system will be used to optimize operation of the system based on real-time data feeds from installed sensors and weather forecasts.
The primary objective of this study was to demonstrate that a CMAC approach can be applied to a conventional rainwater harvesting system in New York City to improve performance by minimizing discharge to the combined sewer during rainfall events, reducing water use for irrigation of local vegetation, and optimizing vegetation health. To achieve this objective, a hydrologic and hydraulic model was developed for the planned and designed rainwater harvesting system to explore multiple potential scenarios prior to the system’s actual construction. Specifically, a comparative analysis of model simulations was performed between the CMAC approach and two conventional rainwater harvesting approaches, including timer based and moisture based irrigation approaches.
2. Materials and Methods
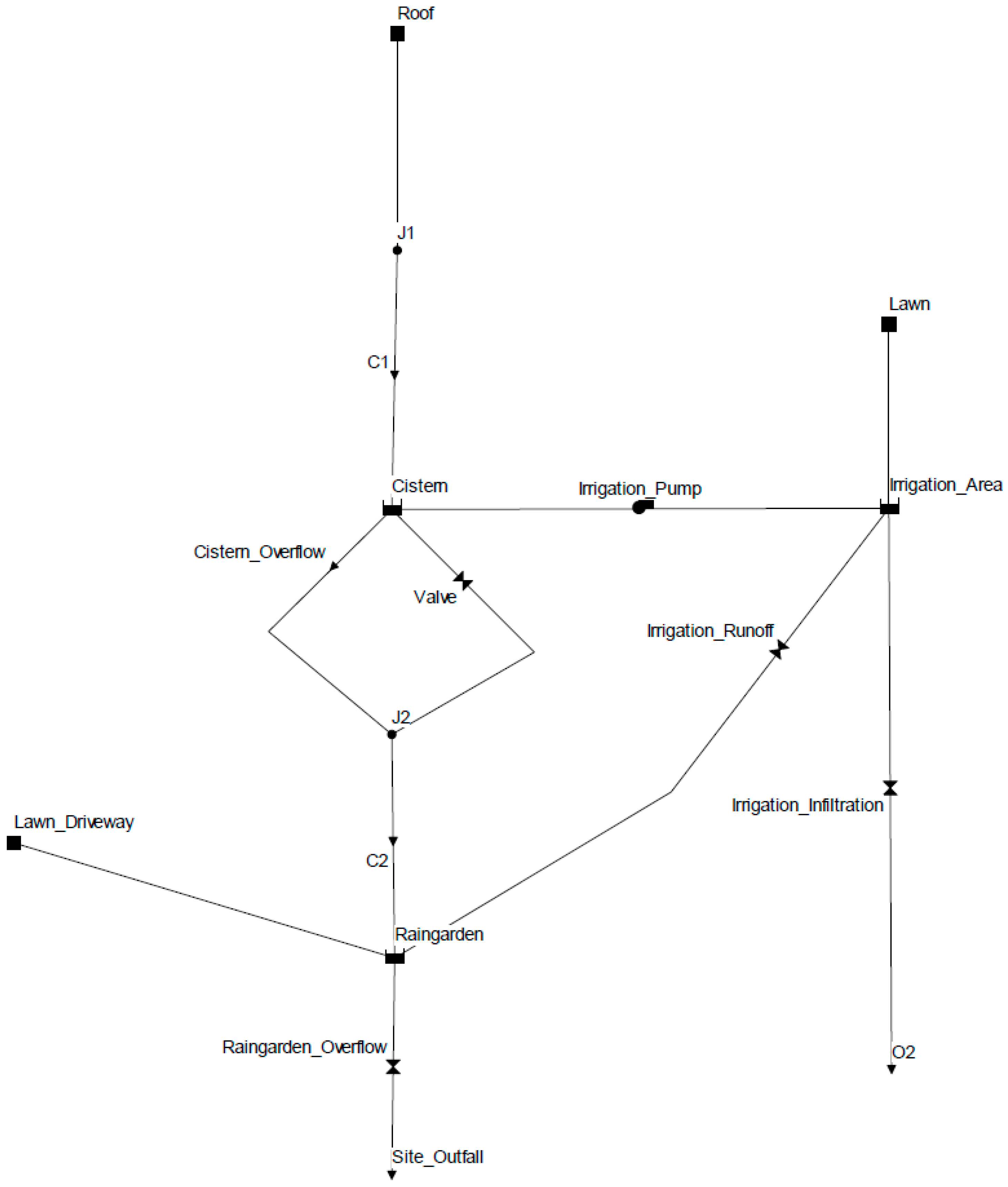
A hydrologic and hydraulic model of the site was developed using the Environmental Protection Agency’s (EPA’s) Stormwater Management Model (SWMM) version 5.1. SWMM is a dynamic rainfall-runoff simulation model and was chosen for use in this study instead of other commonly used models such as HydroCAD for its capability to effectively simulate long-term (continuous) runoff quantity from urban areas while implementing complex logic controls. The runoff component of SWMM operates on a collection of subcatchment areas that receive precipitation and generate runoff. The routing component of SWMM transports this runoff through a system of pipes, storage units, and other features [11]. Refer to Figure 2 for a schematic view of the SWMM model for the system design shown in Figure 1.
2.1. Inputs
Input parameters related to each runoff and routing component of the model are described in the following sections.
2.1.1. Precipitation
Hourly precipitation data for a ten-year period of record between 1 January 2004 and 31 December 2013 were obtained from La Guardia Airport in New York, located approximately 6 miles southeast of the site [12]. The general statistics for the period of record, which were compiled assuming an event separation time of at least 6 h between events and a minimum precipitation depth of 0.25 cm, include:
- Total Precipitation: 1172.7 cm;
- Number of Precipitation Events: 652;
- Largest Precipitation Event: 19.2 cm over 77 h (beginning on 12 October 2005).
2.1.2. Subcatchments
The site is characterized by two subcatchments. One subcatchment represents half of the recreation center’s gymnasium roof with an area of 283 m2. This subcatchment is 100% impervious (no infiltration), has an assumed slope of 2.0%, and drains entirely to the cistern. The second subcatchment represents the driveway area and the adjacent lawn where the raingarden will be constructed and where the adjacent grassed area will be irrigated. This subcatchment has an area of 1133 m2, is 40% impervious, has an average slope of 3.5%, and drains to the raingarden. These subcatchment parameters were obtained from the completed design plans [10].
2.1.3. Infiltration
Soils for the site were evaluated from the “National Cooperative Soil Study Web Soil Survey” (WSS), which is distributed by the U.S. Department of Agriculture (USDA) Natural Resources Conservation Service (NRCS) [13] and are characterized as an urban land-flatbush complex. The soil depth range from 0 to 22.9 cm is primarily comprised of loam, while the depth range from 22.9 cm to 63.5 cm is primarily comprised of very fine sandy loam.
Subcatchment infiltration rates were estimated using the Green-Ampt infiltration equation. SWMM performs these calculations with three input parameters: (i) average capillary suction at the wetting front (SUCT); (ii) initial moisture deficit (IMD) and (iii) saturated hydraulic conductivity of the soil (Ks). These parameters, which were selected from the SWMM 5.1 Manual Soil Characteristics Table based on the soils’ loam classification, were as follows: Ks = 0.33 cm/h., SUCT = 3.5, and IMD = 0.23 [11]. The site’s soil classification is representative of USDA’s hydrologic soil group classification B, which is considered to be generally well-drained with moderately low runoff potential.
2.1.4. Evapotranspiration
Average monthly potential evapotranspiration (PET) estimates for a grass-covered surface were obtained from the Northeast Region Climate Center’s (NRCC) adaptation of the Meteorological Office Rainfall and Evaporation Calculation System (MORECS) model at LaGuardia Airport [14]. The values displayed by Table 1 reflect an average monthly PET for the years 1981–2010 with July being the greatest (11.2 cm/month).
2.1.5. Cistern Geometry
Elements comprising the ARHS (e.g., cistern, valve, etc.) and their properties (e.g., invert elevations, length, etc.) were determined from the project design plans [10]. The designed inside diameter of the cistern is 1.8 m with a height of 5.1 m and a nominal capacity of 11.6 m3. The designed cistern is configured with a 15.2 cm diameter overflow pipe at a height of 4.2 m; therefore, the effective capacity of the cistern is 10.6 m3. The cistern was sized to capture a 3.8 cm rainfall event from the roof subcatchment—68 events exceeded 3.8 cm of rainfall over the 10-year simulation period used for this analysis, which represents an exceedance frequency of approximately 10.4% over the simulation period.
The designed cistern is configured with a 2.5 cm diameter controlled discharge valve at its invert. Based on model simulations, the controlled discharge valve is expected to drain the effective cistern volume in approximately 3 h, which will allow for flexibility to recover cistern storage volume in advance of forecasted rainfall events.
2.1.6. Raingarden Geometry
Elements comprising the raingarden (e.g., overflow, invert, storage volume, etc.) were determined from the project design plans [10]. It should be noted that the design plans do not specify a soil media layer, so the raingarden is designed to function as a stone infiltration system rather than a typical raingarden with soil media and plants; however, it will be referred to as a raingarden herein for consistency with the design plans. The designed raingarden has an effective storage depth of 0.41 m. The bottom 0.30 m is comprised of crushed stone and river rock while the remaining 0.11 m is designed for ponding. When the storage depth of the raingarden exceeds 0.41 m, discharge will be conveyed through two 25.4 cm diameter overflow risers that drain directly to the combined sewer system at the site outfall. The storage volume of the raingarden, adjusted for an assumed porosity of 40% for the crushed stone and river rock, is approximately 11.3 m3. Therefore, it has the capacity to receive the full storage volume of the cistern (10.6 m3).
Raingarden infiltration was estimated using the Green-Ampt infiltration equation for sandy loam in accordance with WSS data at a depth of 22.9 cm to 63.5 cm per the SWMM 5.0 Manual Soil Characteristics Table as follows: Ks = 1.10 cm/h., SUCT = 4.33, and IMD = 0.23 [11]. Based on this infiltration rate and model simulations, the raingarden is expected to infiltrate its entire storage volume in approximately 36 h.
2.1.7. Irrigation Area
Harvested water from the cistern will be used to irrigate a 90.6 m2 grassed area (“irrigation area”) from a centrifugal pump through a series of low flow emitters. Two conventional irrigation approaches were tested as part of this modeling effort and compared to CMAC: (1) standard timer based irrigation and (2) moisture based irrigation.
To track the potential efficacy of both irrigation approaches, the irrigation area was represented in SWMM as a storage unit to approximate the volumetric water content (i.e., moisture) within the typical 7.6 cm effective root zone of common northern grasses (e.g., ryegrass, fescue, bent grass) [15]. The effective root zone is the portion of the soil profile from which most of the water and nutrients are absorbed by the root system [16]. The volumetric water content ranges from completely dry to completely saturated (i.e., all pores are filled with water). The useable volumetric water content, also known as Total Available Water (TAW), of a typical soil profile is the volume held between its field capacity (FC) and permanent wilting point (PWP). FC is the water remaining in the soil after it has been saturated and allowed to drain freely, while PWP is the moisture content of a soil at which plants wilt and fail to recover when supplied with sufficient moisture [16].
Volumetric water content values for each component of the effective root zone are identified in Table 2. The irrigation area storage unit was configured with a monthly evapotranspiration rate based on Table 1. It was also configured to infiltrate above the FC and to overflow (runoff) to the raingarden above the saturation point. An infiltration rate of 0.33 cm/h was calculated based on a loam soil type from the SWMM 5.1 Soil Characteristics Table [11].
2.1.8. Irrigation Demand and Delivery
For the timer based irrigation approach, a maximum daily demand of 0.34 m3 was calculated based on monthly PET in July. In the absence of precipitation, the cistern is expected to go dry after one month of daily irrigation. For the moisture based irrigation approach, a set point was used to trigger irrigation based on soil moisture content instead of daily demand. The set point was defined within the root zone profile as the mid-point between the PWP and the FC. This midpoint, known as the maximum allowable depletion (AD), is commonly used as a watering trigger for irrigation applications. If the volumetric water content drops below AD, it signals that the moisture content is approaching the PWP, and irrigation is needed to replenish moisture. In the absence of precipitation and assuming maximum PET in July, it will take approximately 2 days for AD to be reached from FC and another 2 days to reach the PWP.
To accommodate the maximum potential daily demand for both irrigation approaches, the pumping rate from the cistern to the irrigation area was set at 0.09 m3/h for a period of four hours between 6 am and 10 am. A four-hour duration in the morning was chosen in accordance with general rule of thumb guidelines for effective drip irrigation, such as those provided by Arizona University (Tucson, AZ, USA), so an adequate amount of water can penetrate the root zone at a time of day when plant water uptake is maximized [17].
3. Results
3.1. Model Scenarios
Once model setup was complete, four simulations were performed to compare various operational modes of the cistern including a base simulation with no stormwater control (“Base Scenario”), a constant timer based irrigation schedule (“Timed Scenario”), a moisture based irrigation schedule (“Moisture Scenario”), and an active, CMAC simulation incorporating the cistern discharge valve, precipitation forecasts, and moisture based irrigation schedule (“Active Scenario”).
- The Base Scenario (i.e., existing conditions) was developed to simulate unmanaged runoff to the site outfall to the combined sewer system as a point of reference to compare the performance of the other model scenarios. All subcatchment runoff (i.e., roof, driveway, lawn) was routed directly to the site outfall.
- The Timed Scenario was developed to simulate conventional timer based operation of a rainwater harvesting system by irrigating the grassed irrigation area from harvested rainwater stored in the cistern at a pre-determined time each day (“irrigation use”). It is expected that this scenario will result in the most irrigation use of all scenarios.
- The Moisture Scenario was developed to simulate “smarter” irrigation by maintaining optimal soil moisture within the root zone of the grassed irrigation area (i.e., the range between the soil’s AD and FC). It is expected that irrigation will be required less frequently during months where PET is low (e.g., May, October) and immediately after precipitation events and that this scenario will result in less irrigation use than that of the Timed Scenario.
- The Active Scenario was developed to pair moisture based irrigation with forecast-based logic and adaptive control of the cistern’s discharge valve. The purpose of this simulation is to demonstrate the operation and benefits of a completely automated CMAC system. Logic rules were designed to minimize overflow from the cistern to the raingarden during periods of active rainfall (“wet weather”) and to minimize irrigation use. Overflow from the cistern is minimized as follows: When the predicted runoff volume from the roof subcatchment (due to an approaching rainfall event) exceeds the available storage volume in the cistern, stored water is released to the raingarden through the controlled discharge valve before rainfall begins (during dry weather) to maximize storage capacity within the cistern for the approaching rainfall event.
Each scenario’s development and operational logic are described by Table 3.
3.2. Event-Specific Results
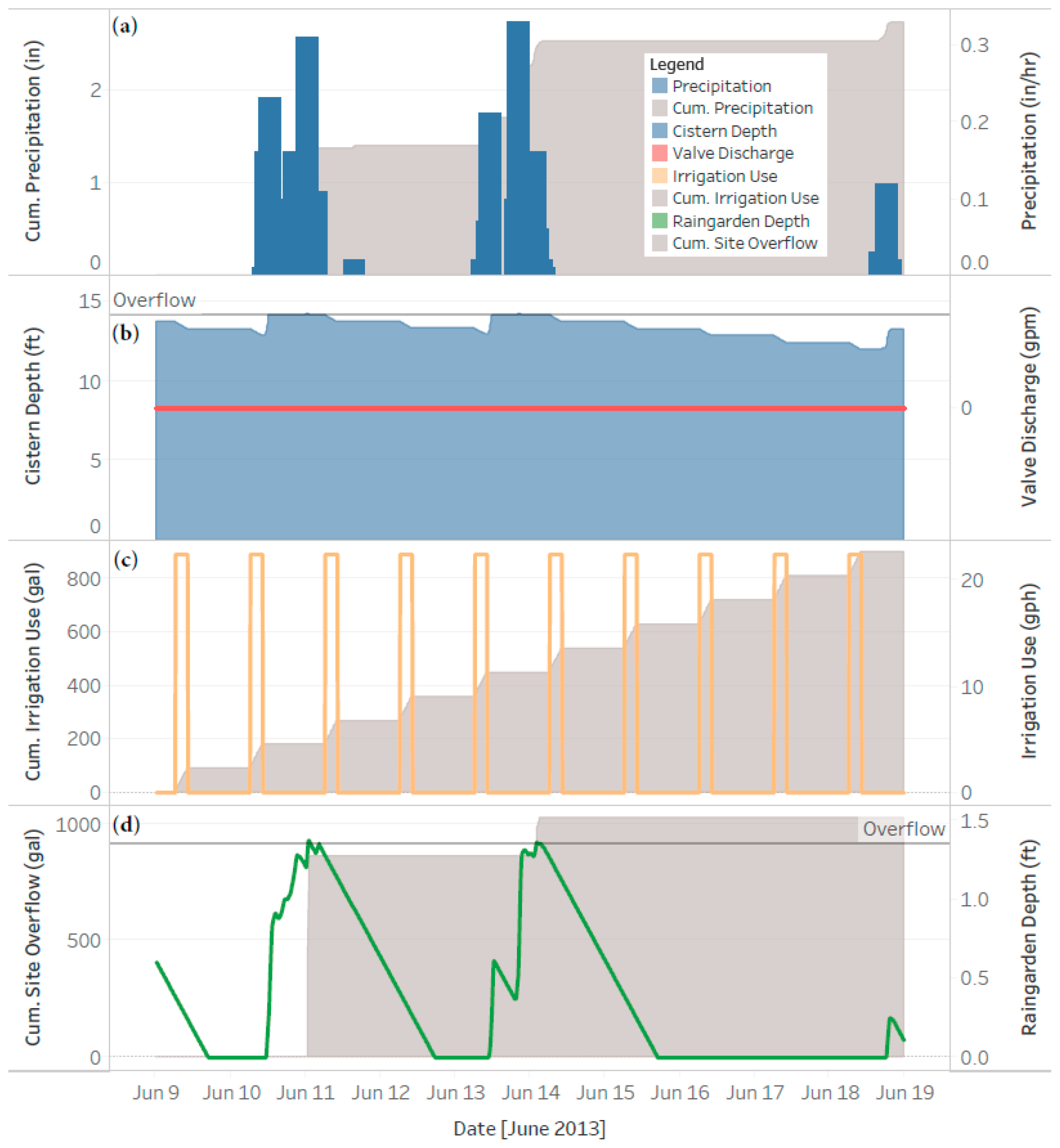
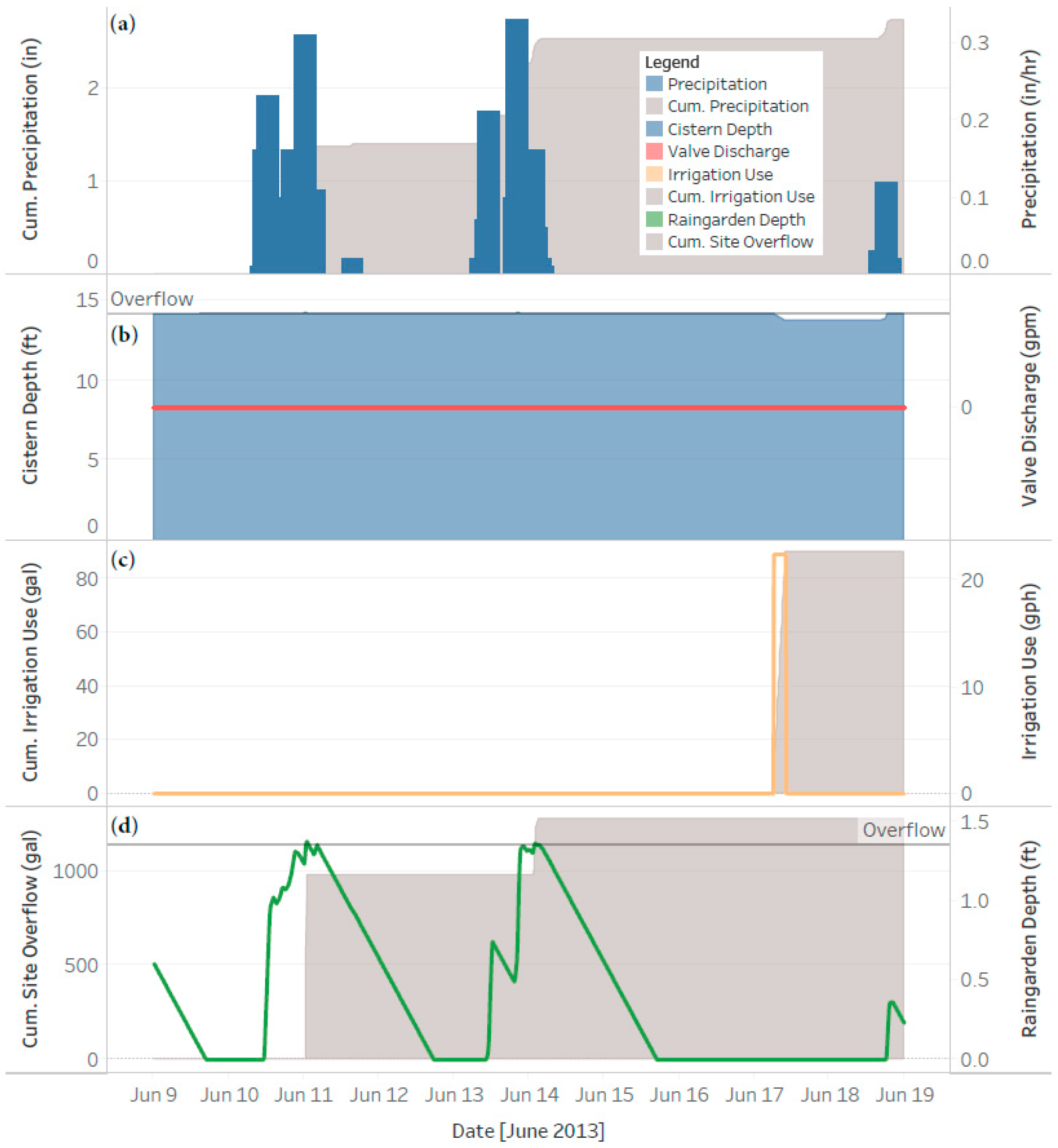
To demonstrate how each modeled scenario functions, results for each scenario for the time period between 9 June 2013 and 18 June 2013 are shown in Figure 3, Figure 4 and Figure 5. This period includes rainfall events on 10 June 2013 and 13 June 2013 with total depths of 3.6 cm and 2.2 cm, respectively. The second rainfall event was followed by a four-day dry period.
A summary of takeaways from the figures is provided below:
- Timed Scenario: The cistern’s water level decreased daily from scheduled irrigation; however, the raingarden overflowed to the site outfall during both rainfall events despite beginning each event empty. The Timed Scenario used significantly more harvested rainwater for irrigation than that of the Moisture and Active Scenarios (Figure 3).
- Moisture Scenario: The cistern’s water level decreased once on 17 June 2013 from moisture based irrigation and overflowed to the raingarden during both rainfall events. The Moisture Scenario resulted in the most cumulative site overflow because water in the cistern was only reduced once for irrigation (Figure 4).
- Active Scenario: The cistern’s water level was effectively managed from 9 June 2013 through 18 June 2013. The cistern was drained in advance of both rainfall events to accommodate expected roof runoff volume; the raingarden did not overflow to the site outfall as a result of either rain event. Additionally, irrigation only occurred once on 17 June 2013 (Figure 5).
3.3. Long-Term Runoff Analysis
Hourly simulations were run for the ten-year rainfall record (1 January 2004 to 31 December 2013) to enable comparisons between the modeled scenarios. The below sections evaluate cistern wet-weather capture performance (i.e., how much inflow the cistern is expected to capture from the roof prior to discharging to the raingarden) and overall wet-weather site performance of the site (i.e., how much inflow the raingarden is expected to capture from the driveway and cistern prior to discharging to the site outfall).
3.3.1. Cistern Performance
Annually averaged results comparing the performance of the cistern for the ten-year rainfall record are summarized in Table 4. The Active Scenario was simulated to capture and retain 76.6% of roof runoff on an annual average basis as compared to 41.3% and 14.8% for the Timed and Moisture Scenarios, respectively. Therefore, the Active Scenario significantly outperformed the Timed and Moisture Scenarios. Outperformance was driven by controlled discharge of stored water from the cistern to the raingarden in advance of forecast rainfall (i.e., during dry weather). On average the Active Scenario cistern released 111 m3/year (65% of all roof runoff) to the raingarden during dry weather.
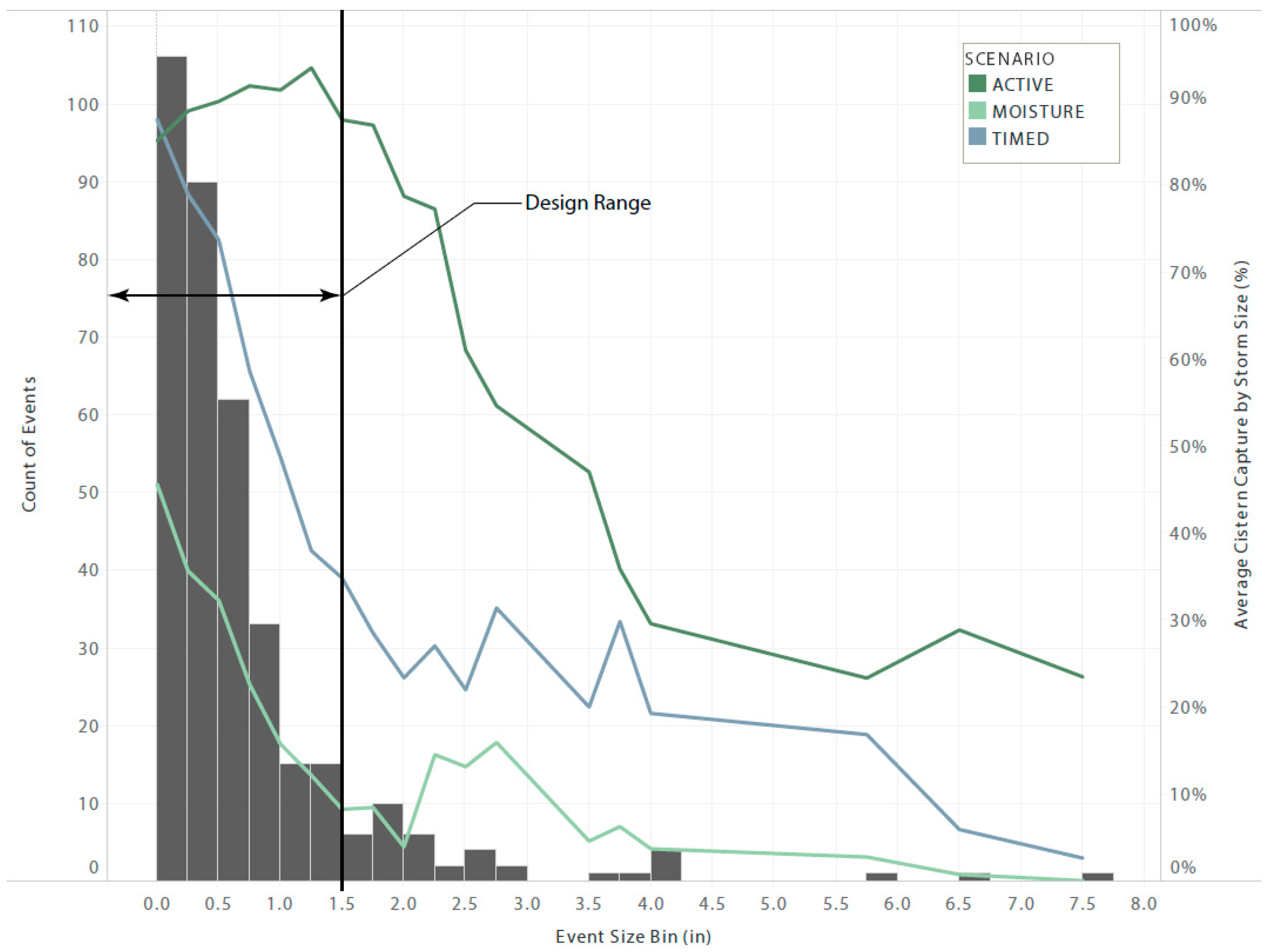
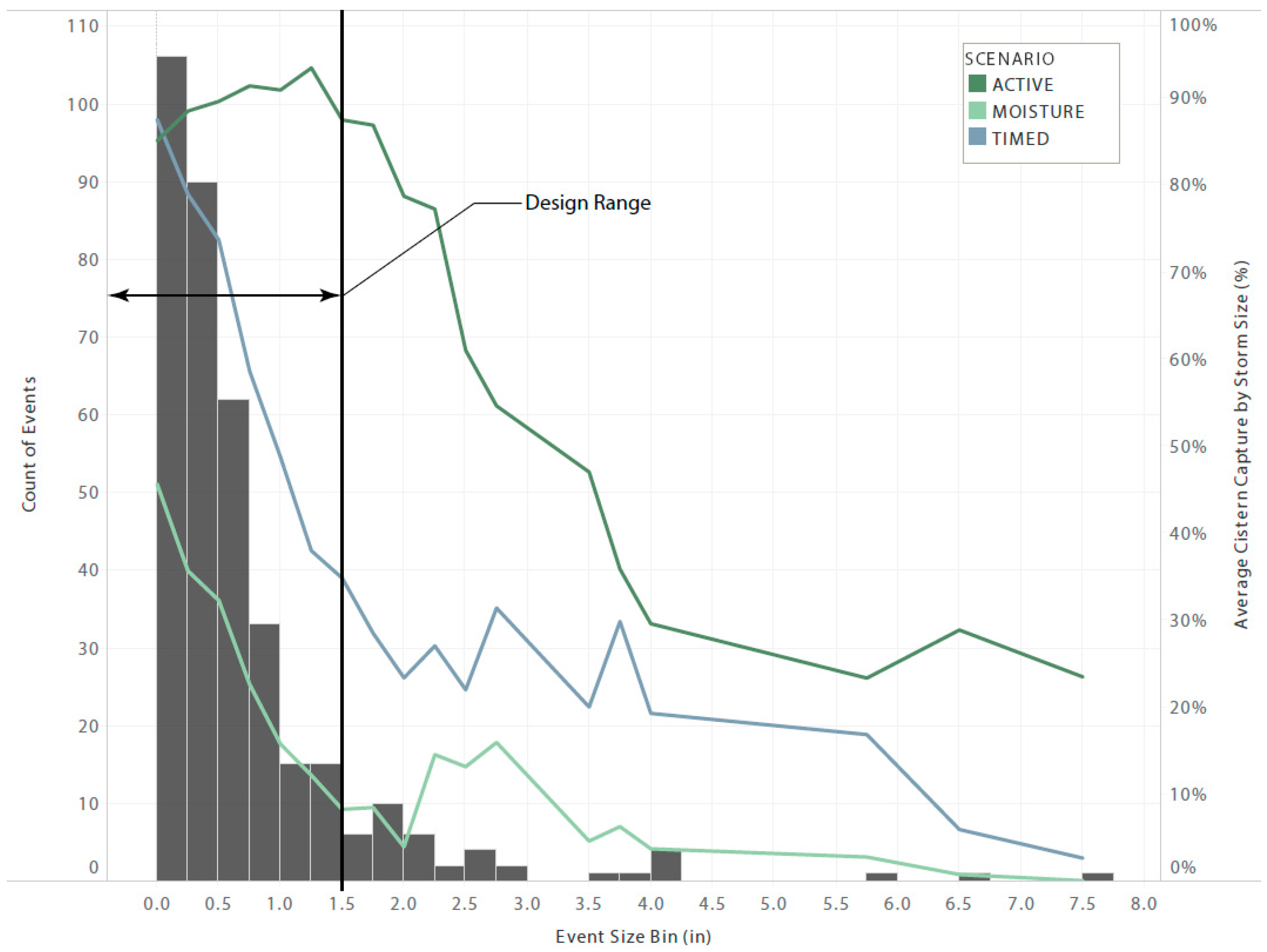
When examining results on a per event basis, the Active Scenario cistern is simulated to capture 85% to 93% of all roof runoff to the cistern, on average, for rainfall events smaller than or equal to 3.8 cm (1.5 inches) during the period of record (see Figure 6). The Active Scenario cistern is unable to capture all roof runoff for smaller events because of control logic rules reported by Table 3 such as the requirement to hold water for at least 12 h after a storm has passed. Performance expectedly decreases for larger, more infrequent, rainfall events.
3.3.2. Site Performance
Annually averaged results comparing the performance of the overall site for the ten-year record are summarized by Table 5. The Active Scenario was simulated to capture and retain 69.8% of site runoff on an annual average basis as compared to 64.6% and 61.9% for the Timed and Moisture Scenarios, respectively. The performance gap between the Active Scenario and Timed and Moisture Scenarios narrows when analyzing the entire site, because the driveway and lawn subcatchment generates 2.2 times more runoff per year, on average, than the roof subcatchment. Therefore, the performance of the raingarden controls overall site performance rather than the upstream cistern.
3.4. Irrigation and Vegetation Health Analysis
Hourly simulation results were then analyzed for the ten-year rainfall record (1 January 2004 to 31 December 2013) to enable comparisons between the modeled scenarios as they relate to irrigation use and vegetation health. The simulated results, summarized by Table 6, indicate that the Active Scenario used the least amount of harvested water for irrigation, was 82% full on average, and was empty for an average of just 6.4 equivalent days per year (i.e., water was unavailable for irrigation for a total time of 6.4 days per year). The Active Scenario is expected to use 81.4% and 18.0% less harvested water for irrigation, on average, than the Active and Moisture Scenarios per year, respectively. Although not part of the system design for the site described here, one advantage of decreasing water use for irrigation via an Active Scenario is increased availability of water for other on-site uses, such as custodial services or building systems.
Vegetation health is an important characteristic to any irrigation system. One indirect indicator of vegetation health is water availability within the cistern. As indicated by Table 6, the Active Scenario cistern was simulated to be 82% full and empty for just 6.4 days per year, on average, throughout the ten-year simulation period despite being repeatedly emptied in advance of forecast rainfall events. The Moisture Scenario performed slightly better than the Active Scenario (74% full, 9.2 empty days) while the Timed Scenario performed slightly worse (90% full, 3.4 empty days). To relate these statistics to vegetative health, the volumetric water content of common northern grasses with a 7.6 cm effective root zone was approximated by the model for each scenario over the ten-year simulation period. All three scenarios regulated the volumetric water content remarkably well over the simulation period. The PWP was never reached for the Moisture and Active Scenarios because water in the cistern was effectively managed by minimizing irrigation use. The PWP was reached for the Timed Scenario on just four days (23 September 2005 through 26 September 2005) throughout the entire ten-year simulation; when the PWP is reached, it is likely that vegetation will die off. Therefore, results indicate that when using moisture based irrigation (i.e., Moisture Scenario and Active Scenario), the rainwater harvesting system will be effective at maintaining adequate volumetric water content within the root zone to keep irrigated grass healthy.
4. Discussion
The primary objective of this study was to demonstrate that a CMAC approach can be applied to a conventional rainwater harvesting system in New York City to improve performance by minimizing discharge to the combined sewer during rainfall events, reducing water use for irrigation of local vegetation, and optimizing vegetation health.
Model results mirror previous studies [4] and indicate that the CMAC rainwater harvesting system is expected to provide significant performance improvements over conventional rainwater harvesting systems. The CMAC system is expected to capture and retain 76.6% of roof runoff per year on average, as compared to just 14.8% and 41.3% for conventional moisture and timer based systems, respectively. When examining results on a per event basis, the CMAC system is simulated to capture 85% to 93% of all roof runoff to the cistern, on average, for rainfall events smaller than or equal to 3.8 cm during the period of record. Similarly, the CMAC system is expected to use 81.4% and 18.0% less harvested rainwater than conventional moisture and timer based irrigation systems, respectively. Indicator statistics such as water availability also suggest that the CMAC system will be effective at maintaining adequate volumetric water content with the root zone to keep irrigated grass healthy. The rainwater harvesting system is scheduled to be constructed in the summer of 2018. Once constructed, it is expected that components of the system will be continuously monitored, and a data analysis will be performed to validate modeling results presented herein.
Though promising, the results of this study also highlight the need for additional research to better understand the potential scale and costs of CMAC implementation required to produce a measurable change towards minimization of CSOs in urbanized areas such as New York City. For example, previous studies found that a CMAC retrofit of an existing stormwater detention facility would be approximately three times lower in cost than the equivalent passive alternative based on whole life cycle costs [18], but the scalability of these savings is still unclear. Previous research has identified that one of the biggest foreseeable challenges to advancing the state of the CMAC practice will be to apply systems thinking to understanding the complex spatiotemporal dynamics that govern water flow and quality across large urban areas—i.e., benefits achieved at a local scale may be masked or eliminated at the city scale if the performance of an individual element is not designed in a broader systems context [9]. Regional implementation of many distributed CMAC systems will require potentially complex and careful logic implementation to ensure that that unintended consequences are minimized. For example, releasing stored water from dozen(s) of regional CMAC systems at the same time prior to a forecasted storm rather than staggering releases could feasibly result in a pre-storm CSO.
It should also be mentioned that automated process control in water and wastewater treatment have been studied extensively; however, the application of CMAC as it relates to watershed management is still in its infancy and is, therefore, a promising area of future research. The approach to build a CMAC system (i.e., power, internet, sensors, control valve, decision support platform) is relatively simplistic. Therefore, the CMAC approach is readily applicable and highly adaptable to a variety of interrelated water resources problems including adaptive management of estuaries, combined sewer overflow minimization, flood control and adaptive management of reservoirs and impoundments, and restoration of natural stream geomorphology through peak flow reduction and flow duration optimization.
5. Conclusions
Conventional rainwater harvesting systems are widely used throughout urbanized areas in the United States for water conservation, but they typically provide minimal reduction of runoff. Findings from this study demonstrate that recent advances in technology through CMAC can provide significant performance improvements over conventional rainwater harvesting systems in both water conservation and runoff control. The results of this study, therefore, indicate that the flexibility of the CMAC approach to meet competing objectives is promising for widespread implementation in New York City and other heavily urbanized areas challenged by stormwater management issues. To advance this research, it is recommended that future studies evaluate the feasibility, cost, and performance associated with widespread implementation, particularly at a regional scale within a systems context.
Acknowledgments
This work was funded, in part, by the National Science Foundation (NSF) grant CMMI-1325676. Any opinions, findings, and conclusions expressed in this letter are those of the authors and not meant to represent the views of any supporting institution.
Author Contributions
Patricia Culligan is the Principal Investigator of the NSF grant that provided partial support for this work and oversaw the research investigation; David Roman conceived, designed, and performed the modeling; David Roman, Andrea Braga, and Nandan Shetty analyzed the data; David Roman and Andrea Braga wrote the paper, with input from Patricia Culligan and Nandan Shetty.
Conflicts of Interest
The authors declare no conflict of interest; however, it should be noted that Geosyntec Consultants has a minor investment stake in Opti, Inc., the company that provides the CMAC technology discussed herein.
References
- National Atmospheric and Oceanic Administration. A National Strategy to Restore Coastal and Estuarine Habitat, April 2002. Available online: http://www.era.noaa.gov/pdfs/entire.pdf (accessed on 6 September 2017).
- Jones, M.P.; Hunt, W.F. Performance of Rainwater Harvesting Systems in the Southeastern United States. Resour. Conserv. Recycl. 2009, 54, 623–629. [Google Scholar] [CrossRef]
- Atzori, L.; Iera, A.; Morabito, G. The Internet of things: A Survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Lefkowitz, J.R.; Sarmanian, A.K.; Quigley, M. Continuous Monitoring and Adaptive Control—The Internet of Things Transforms Stormwater Management. J. N. Engl. Water Environ. Assoc. 2016, 50, 44–51. [Google Scholar]
- Quigley, M.Q.; Brown, C. Transforming our Cities: High Performance Green Infrastructure, Water Environment Research Foundation, 2014, Project INFR1R11. Available online: https://www.werf.org/a/ka/Search/ResearchProfile.aspx?ReportId=INFR1R11 (accessed on 3 August 2017).
- Roman, D.C.; Quigley, M. Low Cost Retrofit of Standard Tide Gates to Facilitate Flood Protection and Halt Upstream Land Subsidence. In Proceedings of the StormCon Coastal Protection Symposium, Anaheim, CA, USA, 21–25 August 2011. [Google Scholar]
- Poresky, A.; Boyle, R.; Cadwalader, O. Taking Stormwater Real Time Controls to the Watershed Scale: Evaluating the Business Case and Developing an Implementation Roadmap for an Oregon MS4. In Proceedings of the California Stormwater Quality Association, Monterey, CA, USA, 19–21 October 2015. [Google Scholar]
- Lefkowitz, J. Converting Dry Ponds to Wet Ponds without Excavation: Forecast Based Real Time Outlet Control Offers a Least Cost Retrofit Strategy. In Proceedings of the Water Environment Federation, WEFTEC 2016: Session 210 through Session 219; Water Environment Federation: Alexandria, VA, USA, 2016; pp. 3071–3083. [Google Scholar]
- Kerkez, B.; Gruden, C.; Lewis, M.; Montestruque, L.; Quigley, M.; Wong, B.; Bedig, A.; Kertesz, R.; Braun, T.; Cadwalader, O.; et al. Smarter Stormwater Systems. Environ. Sci. Technol. 2016, 50, 7267–7273. [Google Scholar] [CrossRef] [PubMed]
- New York City Department of Parks. The Construction of Greenstreets and Rain Gardens Designed by Capturing Stormwater in the Borough of the Bronx; File Number 220552603; New York City Department of Buildings: New York, NY, USA, 28 February 2017.
- U.S. Environmental Protection Agency. Stormwater Management Model User’s Manual Version 5.1. 2015. Available online: https://www.epa.gov/water-research/storm-water-management-model-swmm#documents (accessed on 30 May 2017).
- National Climatic Data Center. Hourly Precipitation Records, La Guardia Airport Station 305811. Available online: https://www.ncdc.noaa.gov/cdo-web/datasets (accessed on 16 April 2017).
- U.S. Department of Agriculture—National Resources Conservation Service. Web Soil Survey 1.1 National Cooperative Soil Survey. Available online: http://websoilsurvey.nrcs.usda.gov (accessed on 16 April 2017).
- Northeast Regional Climate Center. Daily Evapotranspiration and Soil Moisture Estimates for the Northeastern United States, NRCC Research Publication RR-94-1. Available online: http://www.nrcc.cornell.edu/wxstation/pet/pet.html (accessed on 16 April 2017).
- Brown, R.N.; Perciavalle, C.; Narkiewicz, S.; DeCuollo, S. Relative Rooting Depths of Native Grasses and Amenity Grasses with Potential for use on Roadsides in New England. HortScience 2010, 45, 393–400. [Google Scholar]
- University of Wisconsin. Irrigation Management in Wisconsin, Publication A3600-01. 2015. Available online: http://fyi.uwex.edu/cropirrigation/files/2015/03/IrrigationManagement.pdf (accessed on 6 May 2017).
- Arizona University College of Agriculture and Life Sciences. Drip Irrigation 101. Available online: https://cals.arizona.edu/backyards/sites/cals.arizona.edu.backyards/files/page16.pdf (accessed on 15 December 2016).
- Poresky, A.; Boyle, R.; Cadwalader, O. Piloting Real Time Control Retrofits of Stormwater Facilities: Two Oregon Case Studies and Beyond. In Proceedings of the Pacific Northwest Clean Water Association, Boise, ID, USA, 26–27 October 2015. [Google Scholar]
Figure 1.
Schematic overview of system’s design (image courtesy of Google Earth).
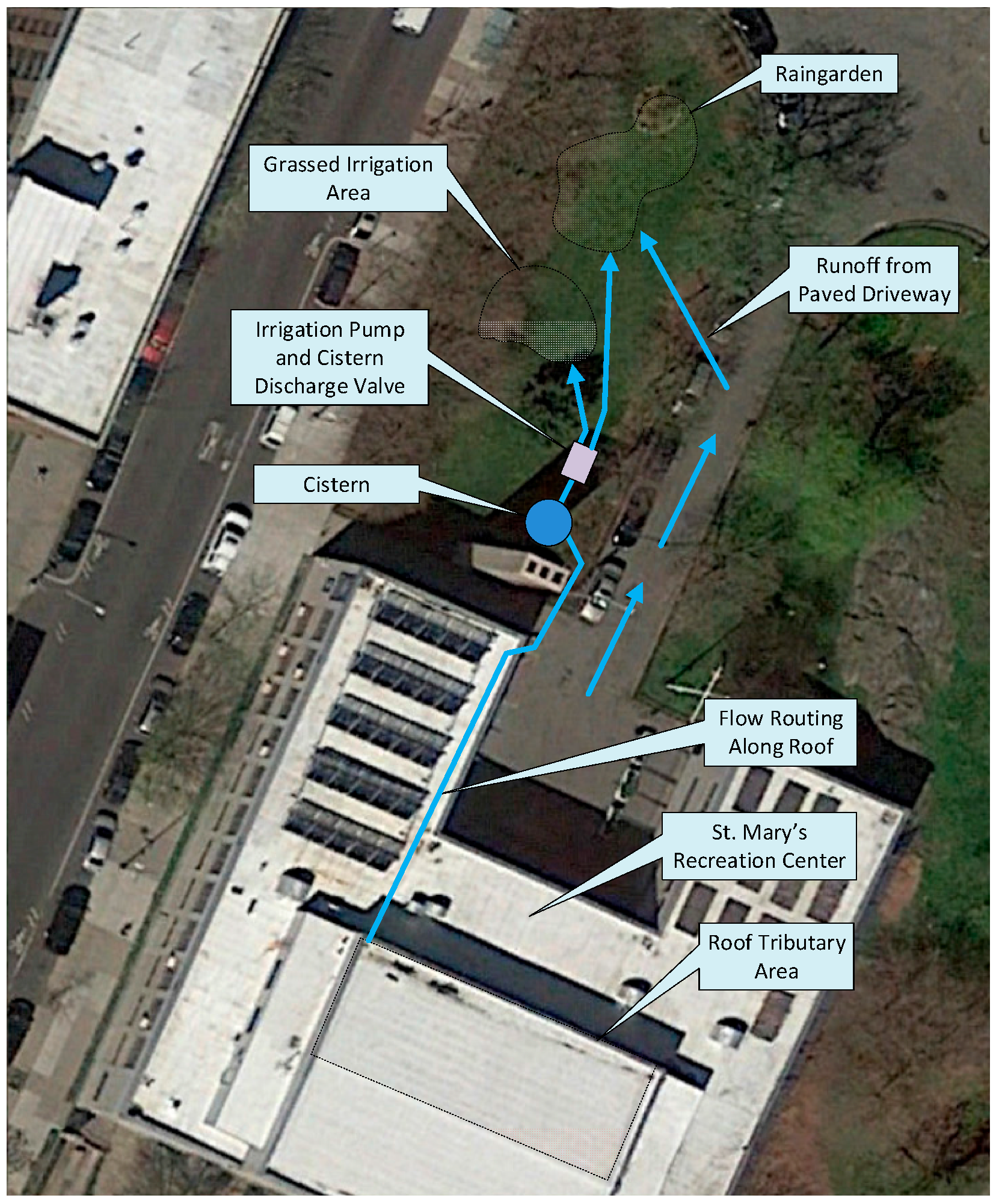
Figure 2.
Schematic of Stormwater Management Model (SWMM) model for the site.

Figure 3.
Timed Scenario Performance (9 June 2013–19 June 2013): (a) Rainfall occurred on 10 June 2013 and 13 June 2013; (b) The cistern’s water level decreased daily from scheduled irrigation, but overflowed to the raingarden during both rainfall events; (c) Scheduled irrigation occurred each day, including during rainfall; (d) The raingarden overflowed to the site outfall during both rainfall events despite beginning each event empty.
Figure 3.
Timed Scenario Performance (9 June 2013–19 June 2013): (a) Rainfall occurred on 10 June 2013 and 13 June 2013; (b) The cistern’s water level decreased daily from scheduled irrigation, but overflowed to the raingarden during both rainfall events; (c) Scheduled irrigation occurred each day, including during rainfall; (d) The raingarden overflowed to the site outfall during both rainfall events despite beginning each event empty.
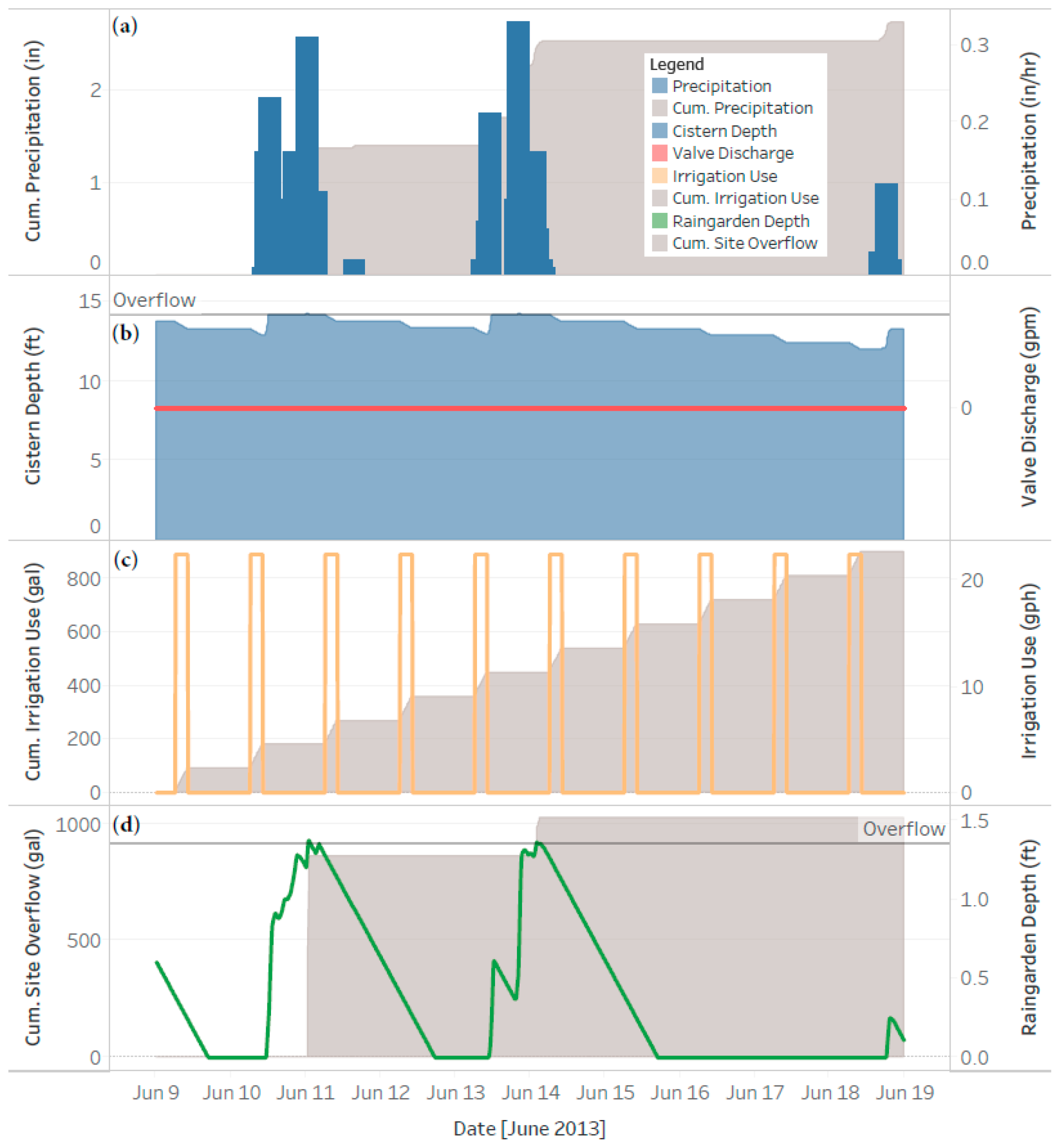
Figure 4.
Moisture Scenario Performance (9 June 2013–19 June 2013): (a) Rainfall occurred on 10 June 2013 and 13 June 2013; (b) The cistern’s water level decreased once on 17 June 2013 from moisture based irrigation and overflowed to the raingarden during both rainfall events; (c) Moisture based irrigation occurred once on 17 June 2013; (d) The raingarden overflowed to the site outfall during both rainfall events despite beginning each event entirely empty.
Figure 4.
Moisture Scenario Performance (9 June 2013–19 June 2013): (a) Rainfall occurred on 10 June 2013 and 13 June 2013; (b) The cistern’s water level decreased once on 17 June 2013 from moisture based irrigation and overflowed to the raingarden during both rainfall events; (c) Moisture based irrigation occurred once on 17 June 2013; (d) The raingarden overflowed to the site outfall during both rainfall events despite beginning each event entirely empty.
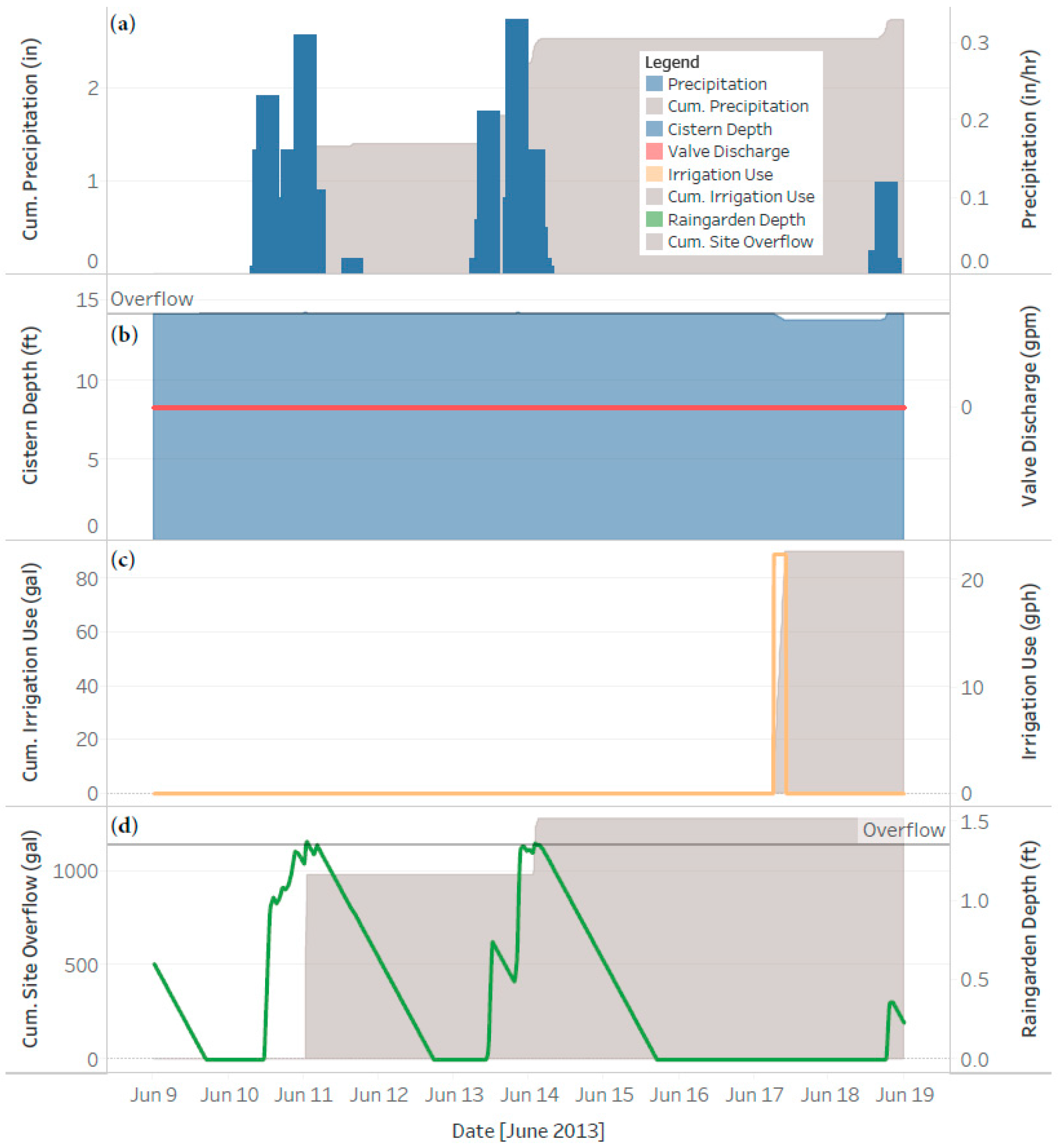
Figure 5.
Active Scenario Performance (9 June 2013–19 June 2013): (a) Rainfall occurred on 10 June 2013 and 13 June 2013; (b) The cistern was drained in advanced of both rainfall events to accommodate expected roof runoff volume; (c) Moisture and forecast based irrigation occurred once on 17 June 2013; (d) The raingarden did not overflow to the site outfall as a result of either rain event.
Figure 5.
Active Scenario Performance (9 June 2013–19 June 2013): (a) Rainfall occurred on 10 June 2013 and 13 June 2013; (b) The cistern was drained in advanced of both rainfall events to accommodate expected roof runoff volume; (c) Moisture and forecast based irrigation occurred once on 17 June 2013; (d) The raingarden did not overflow to the site outfall as a result of either rain event.
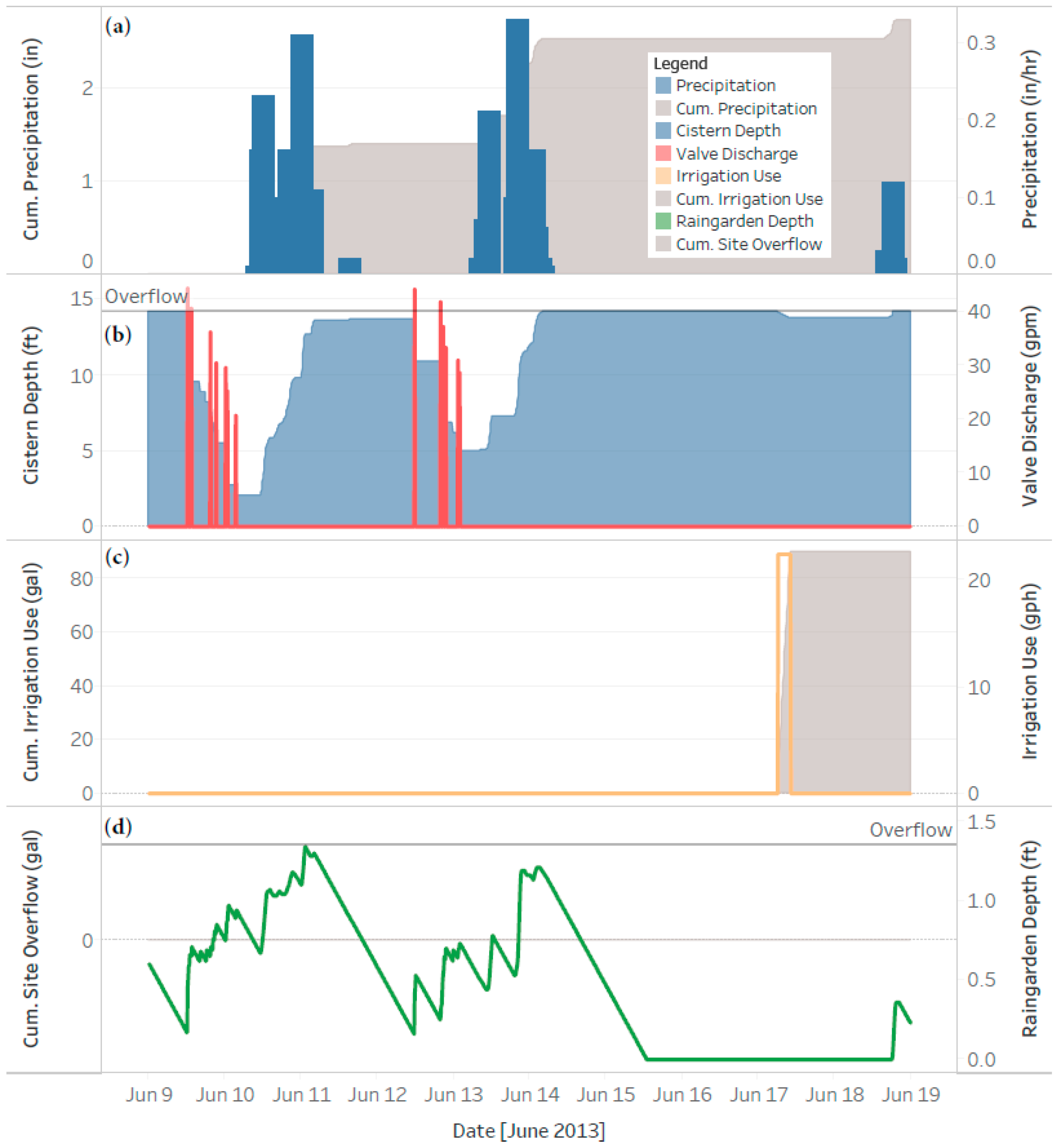
Figure 6.
Scenario Capture Efficiency of Cistern from Events Larger than 0.1 inch (0.25 cm) (shaded area indicates number of rainfall events within a specific event size bin).
Figure 6.
Scenario Capture Efficiency of Cistern from Events Larger than 0.1 inch (0.25 cm) (shaded area indicates number of rainfall events within a specific event size bin).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Average monthly potential evapotranspiration (PET) (1981–2010).
| Month | PET (cm/Month) |
|---|---|
| January | 1.14 |
| February | 1.68 |
| March | 3.51 |
| April | 5.89 |
| May | 9.09 |
| June | 10.21 |
| July | 11.20 |
| August | 9.60 |
| September | 6.58 |
| October | 4.04 |
| November | 1.91 |
| December | 1.14 |
Table 2.
Effective root zone soil profile components.
| Condition | Volumetric Water Content 1 | Model Process 2 |
|---|---|---|
| Saturation | 46% | PET, Runoff, Infiltration |
| Field Capacity | 30% | PET, Infiltration |
| Permanent Wilt Point | 10% | PET |
Note: 1 Values obtained from University of Wisconsin’s Irrigation Scheduling Program (WISP) for loam soil type [16]. 2 Indicates SWMM model process based on soil moisture condition. For example, all pores are full when the soil profile is saturated; therefore, the model will simulate depletion of volumetric water content through runoff, gravitational infiltration, and PET processes.
Table 3.
Model scenario based logic rules.
| Scenario | Variable | Condition | Action |
|---|---|---|---|
| ---Irrigation Rules--- | |||
| Timed | Month | May through October 1 | Irrigate if all conditions met |
| Cistern Depth | >30.5 cm2 | ||
| Time | 6 am to 10 am | ||
| Moisture | Month | May through October | Irrigate if all conditions met |
| Cistern Depth | >30.5 cm | ||
| Time | 6 am to 10 am | ||
| Soil Moisture | <Allowable Depletion | ||
| Active | Month | May through October | Irrigate if all conditions met |
| Cistern Depth | >30.5 cm | ||
| Time | 6 am to 10 am | ||
| Soil Moisture | <Allowable Depletion | ||
| 24-h Rainfall Forecast 3,4 | None in forecast | ||
| ---Discharge Valve Control Rules--- | |||
| Timed | Not Applicable | Not Applicable | Not Applicable |
| Moisture | Not Applicable | Not Applicable | Not Applicable |
| Active | Month | May through October | Drain cistern to accommodate predicted runoff volume if all conditions are met |
| 24-h Pred. Runoff Volume 5 | >Available Cistern Storage Volume | ||
| 6-h Rainfall Forecast 6 | None in forecast | ||
| Past 12-h of Rainfall 7 | <0.25 cm | ||
Note: 1 The advanced rainwater harvesting system (ARHS) will be winterized and inoperable in the winter. All findings contained herein exclude the winter months. 2 A cistern depth of at least 30.5 cm is required to prevent cavitation of the pump. 3 If soil moisture drops below allowable depletion (AD), but precipitation is expected in the next 24 h, irrigation will not occur. 4 The “forecast” in this model is the actual historical precipitation record, not a forecast of anticipated precipitation. Actual wet weather performance will deviate from the values provided due to the fluctuations in forecast reliability and accuracy. 5 The predicted volume that will enter the cistern from the roof subcatchment is continuously calculated from the precipitation “forecast”. 6 The controlled discharge valve is closed 6 h prior to rainfall to avoid inadvertent wet weather discharge. 7 The controlled discharge valve is held closed for 12 h after any rainfall event greater than 0.25 cm to allow the downstream raingarden and combined sewer system to regain capacity.
Table 4.
Cistern Wet-Weather Performance Comparison (2004–2013)—Annual Averages.
| Variable | Base Scenario | Timed Scenario | Moisture Scenario | Active Scenario |
|---|---|---|---|---|
| Roof Runoff (m3) | 172 | 172 | 172 | 172 |
| Cistern Overflow (m3) | - | 105 | 148 | 43 |
| Controlled Discharge (m3) | - | 0 | 0 | 111 |
| Cistern Capture (%) | - | 41.3 | 14.8 | 76.6 |
Table 5.
Site Wet-Weather Performance Comparison (2004–2013)—Annual Averages.
| Variable | Base Scenario | Timed Scenario | Moisture Scenario | Active Scenario |
|---|---|---|---|---|
| Total Runoff 1 (m3) | 550 | 550 | 550 | 550 |
| Site Overflow (m3) | 550 | 208 | 222 | 178 |
| Site Capture (%) | - | 64.6 | 61.9 | 69.8 |
Note: 1 Includes runoff from roof, driveway, and lawn subcatchments.
Table 6.
Irrigation Performance Comparison (2004–2013)—Annual Averages.
| Variable | Timed Scenario | Moisture Scenario | Active Scenario |
|---|---|---|---|
| Cistern Storage (% Full) | 74 | 90 | 82 |
| Irrigation Use (m3) | 59 | 13 | 11 |
| Cistern Empty (days) | 9.2 | 3.4 | 6.4 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Roman, D.; Braga, A.; Shetty, N.; Culligan, P. Design and Modeling of an Adaptively Controlled Rainwater Harvesting System. Water 2017, 9, 974. https://doi.org/10.3390/w9120974
AMA Style
Roman D, Braga A, Shetty N, Culligan P. Design and Modeling of an Adaptively Controlled Rainwater Harvesting System. Water. 2017; 9(12):974. https://doi.org/10.3390/w9120974
Chicago/Turabian StyleRoman, David, Andrea Braga, Nandan Shetty, and Patricia Culligan. 2017. "Design and Modeling of an Adaptively Controlled Rainwater Harvesting System" Water 9, no. 12: 974. https://doi.org/10.3390/w9120974
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.