
Low-Cost BD/MEMS Tightly-Coupled Pedestrian Navigation Algorithm

Abstract
:
1. Introduction
2. Related Work
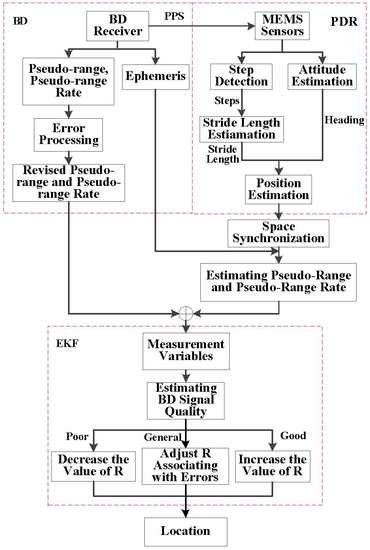
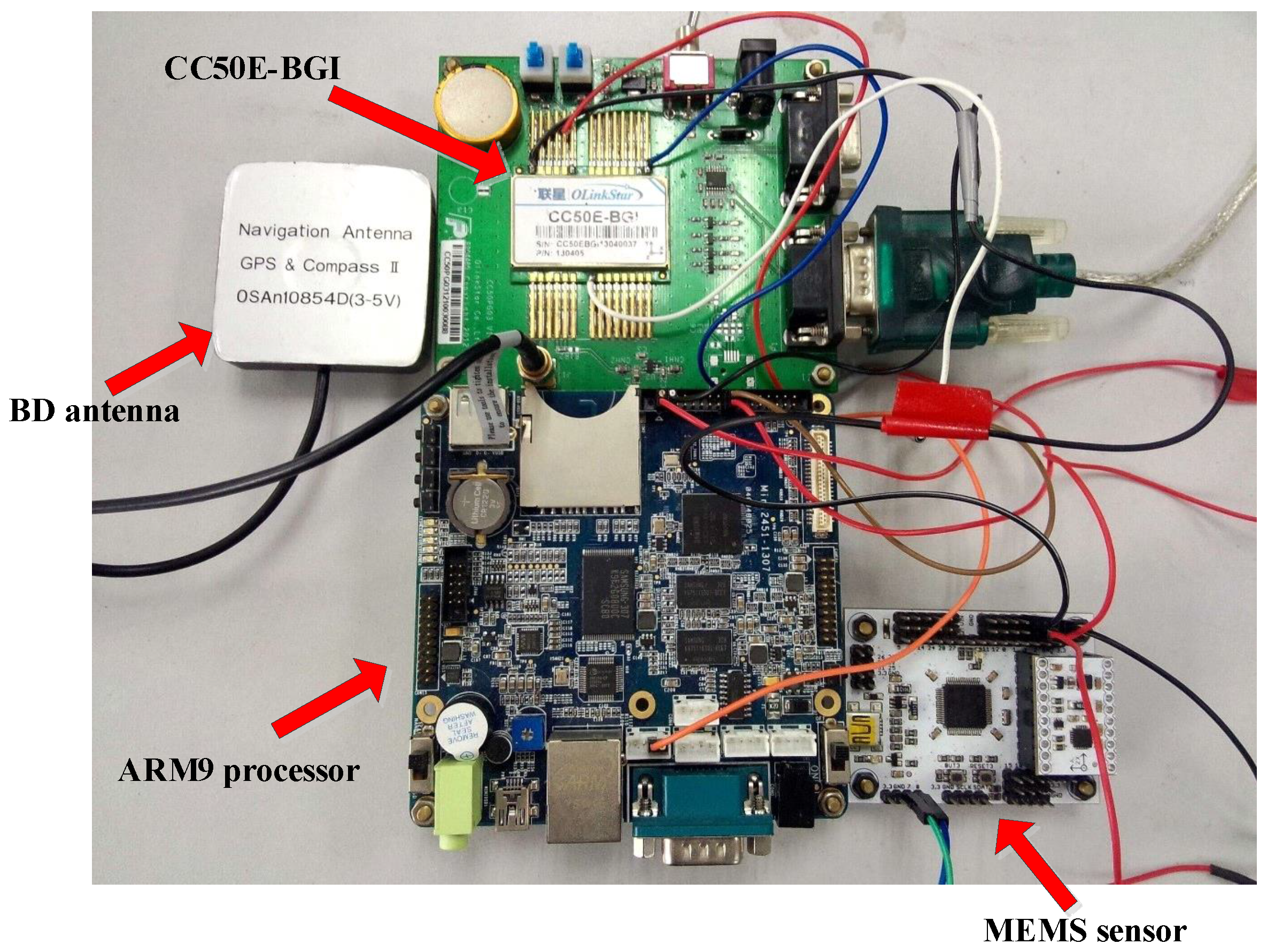
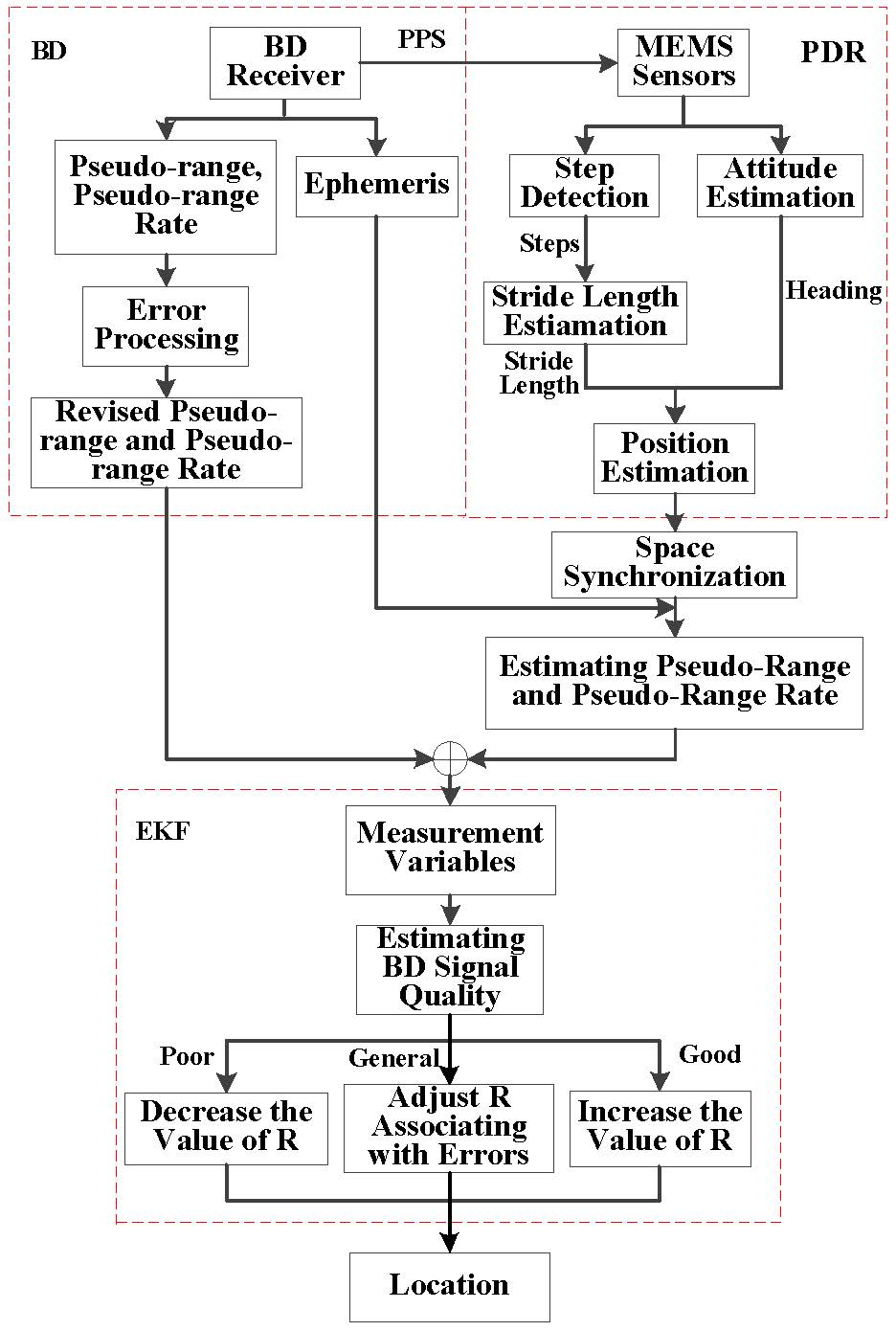
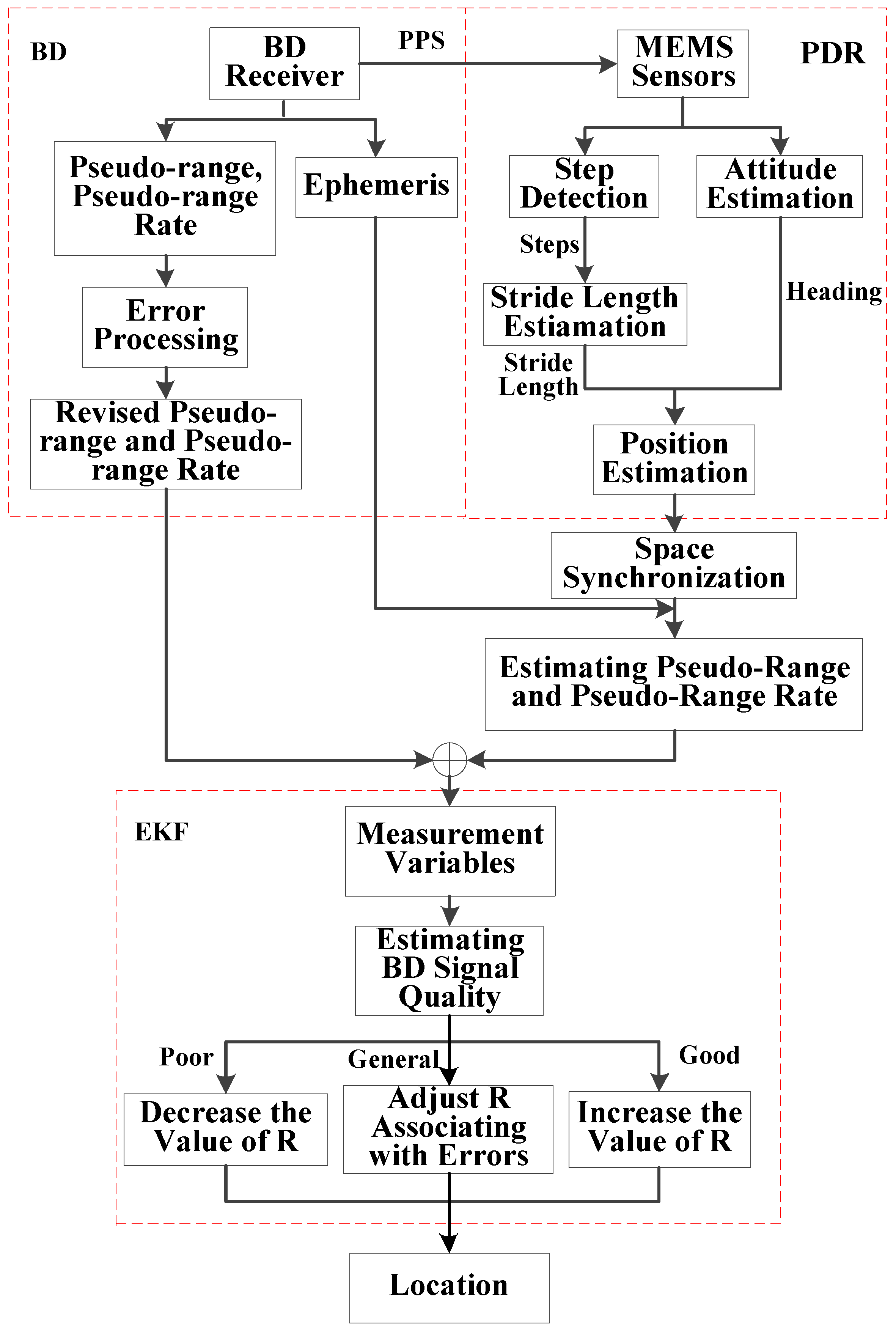
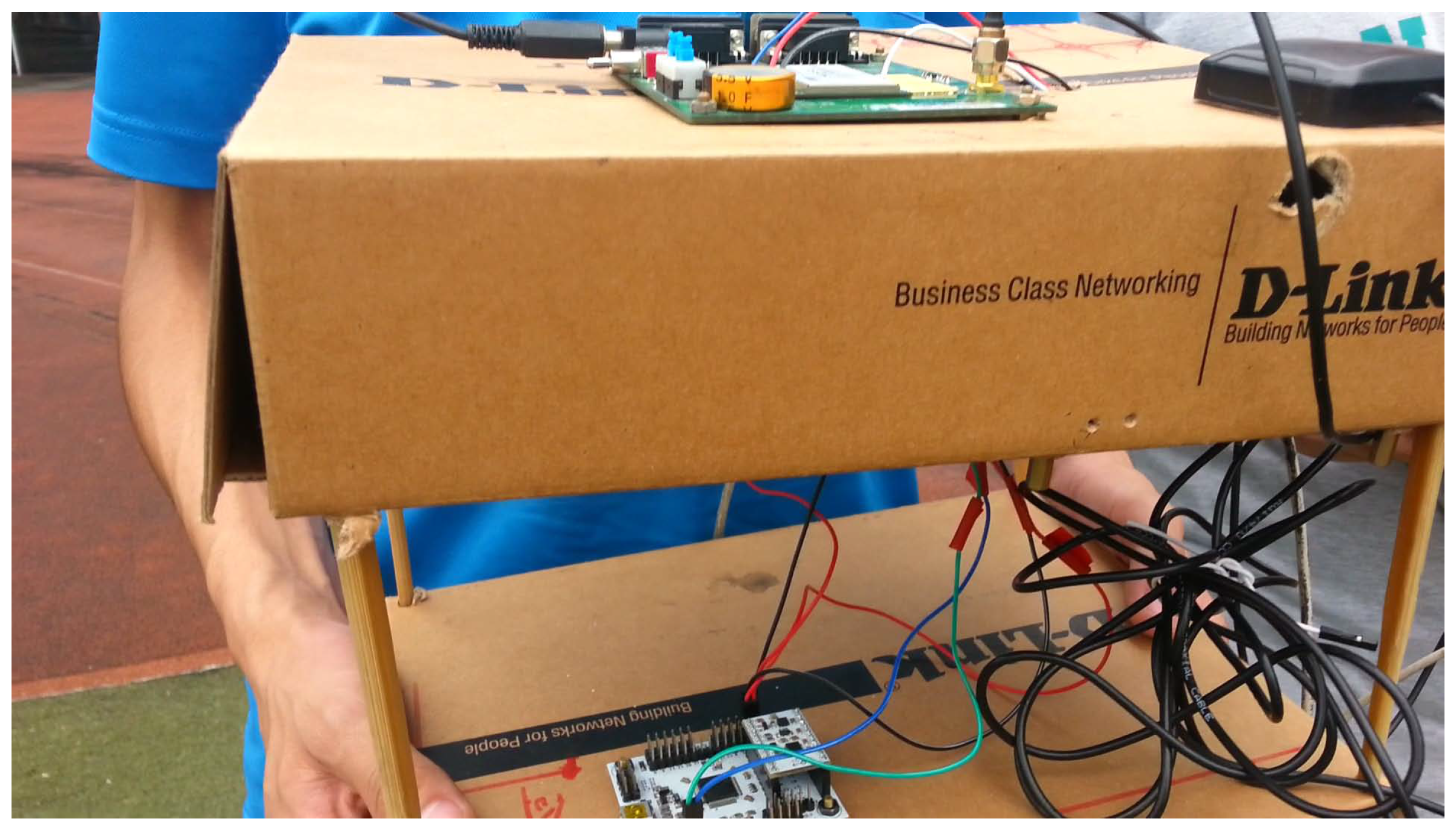
3. System Description
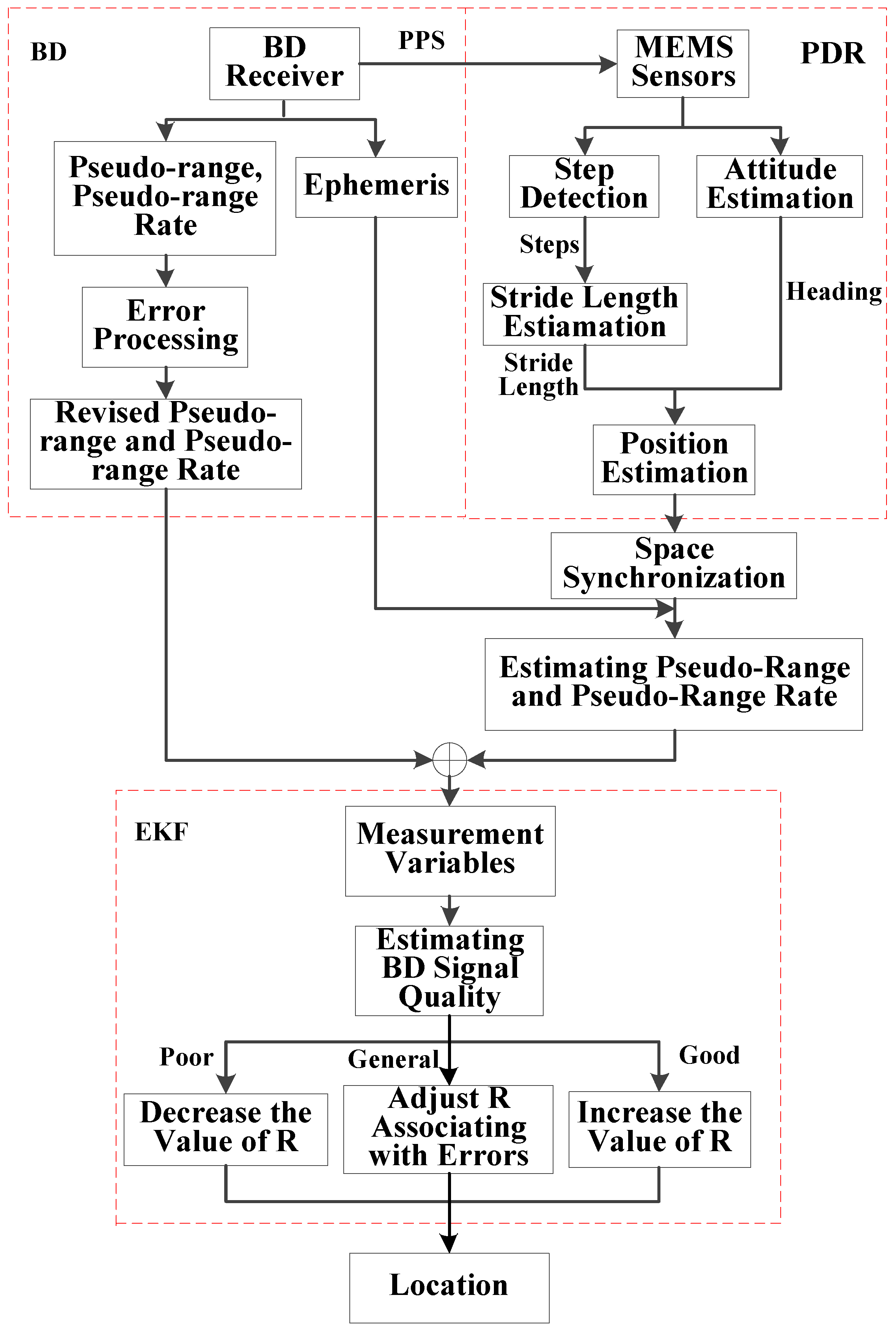
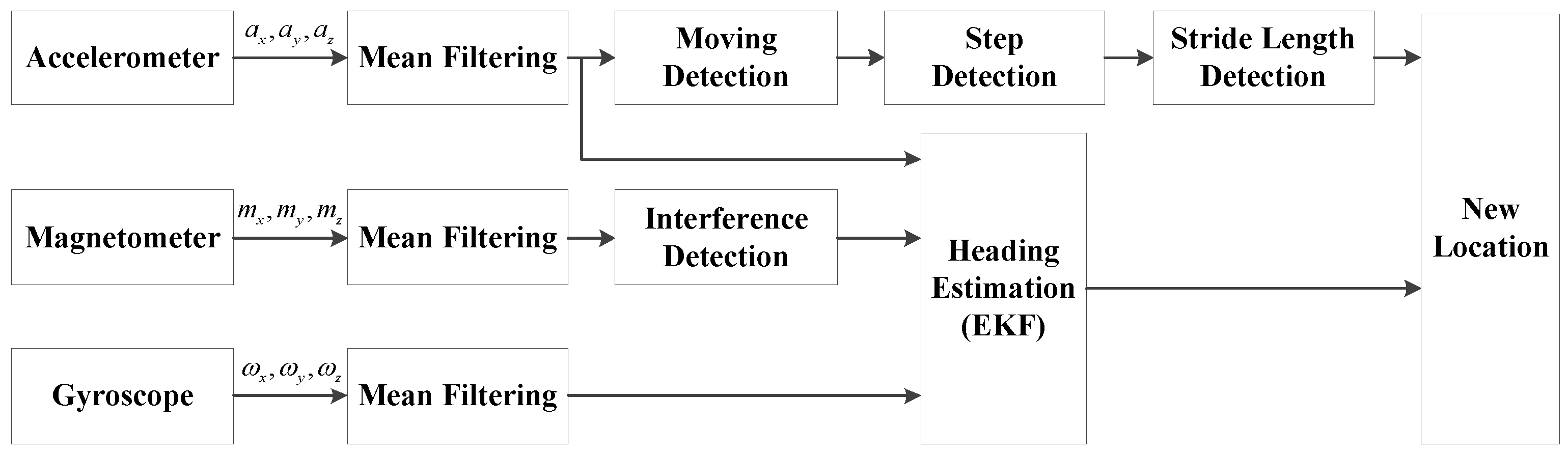
3.1. Pedestrian Dead Reckoning
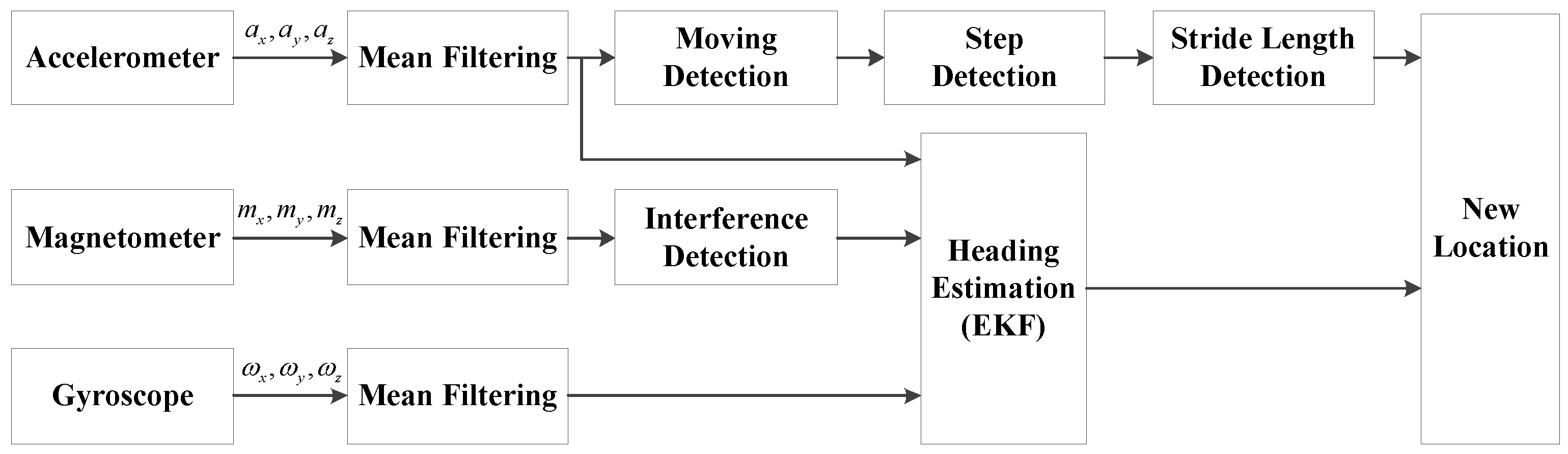
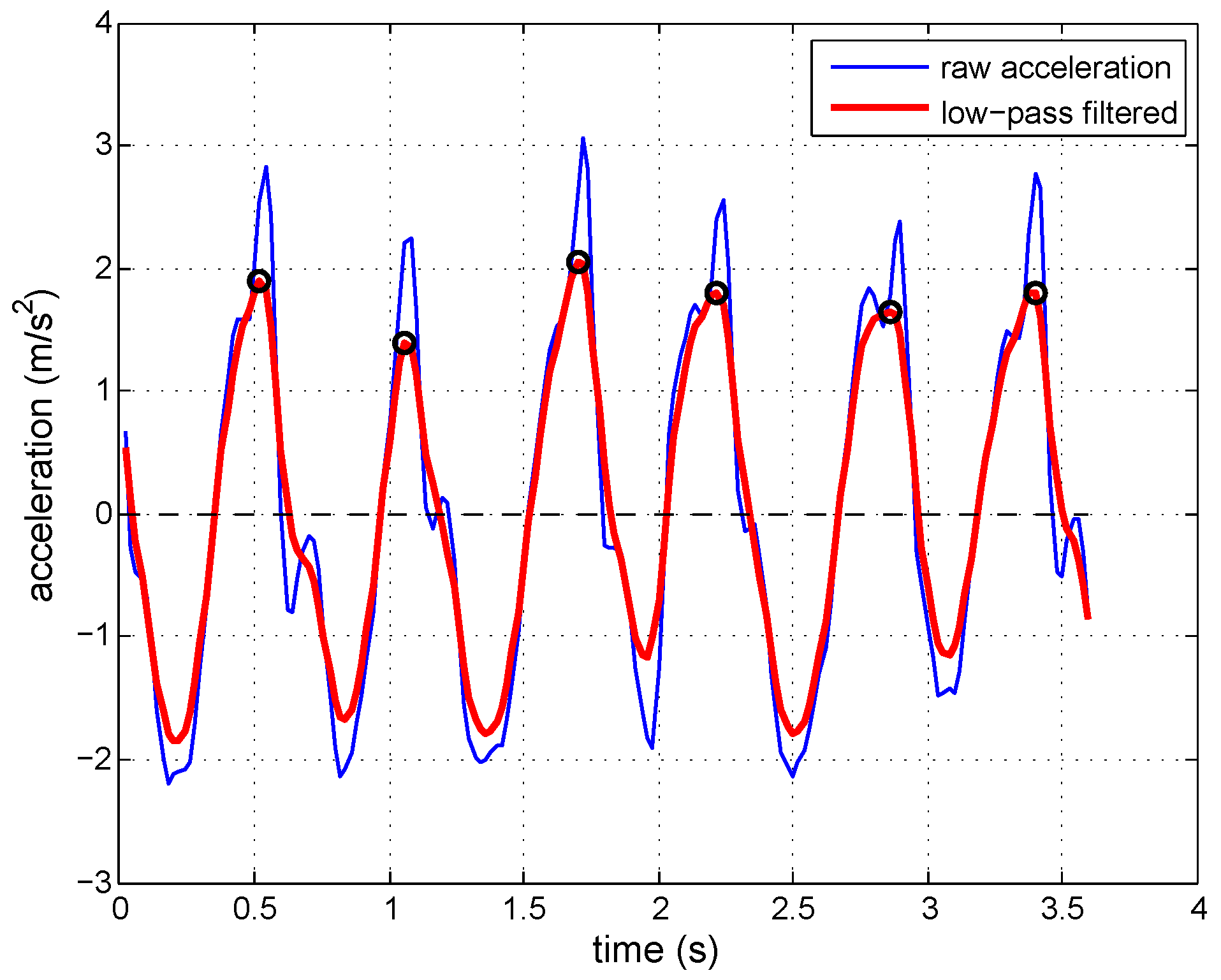
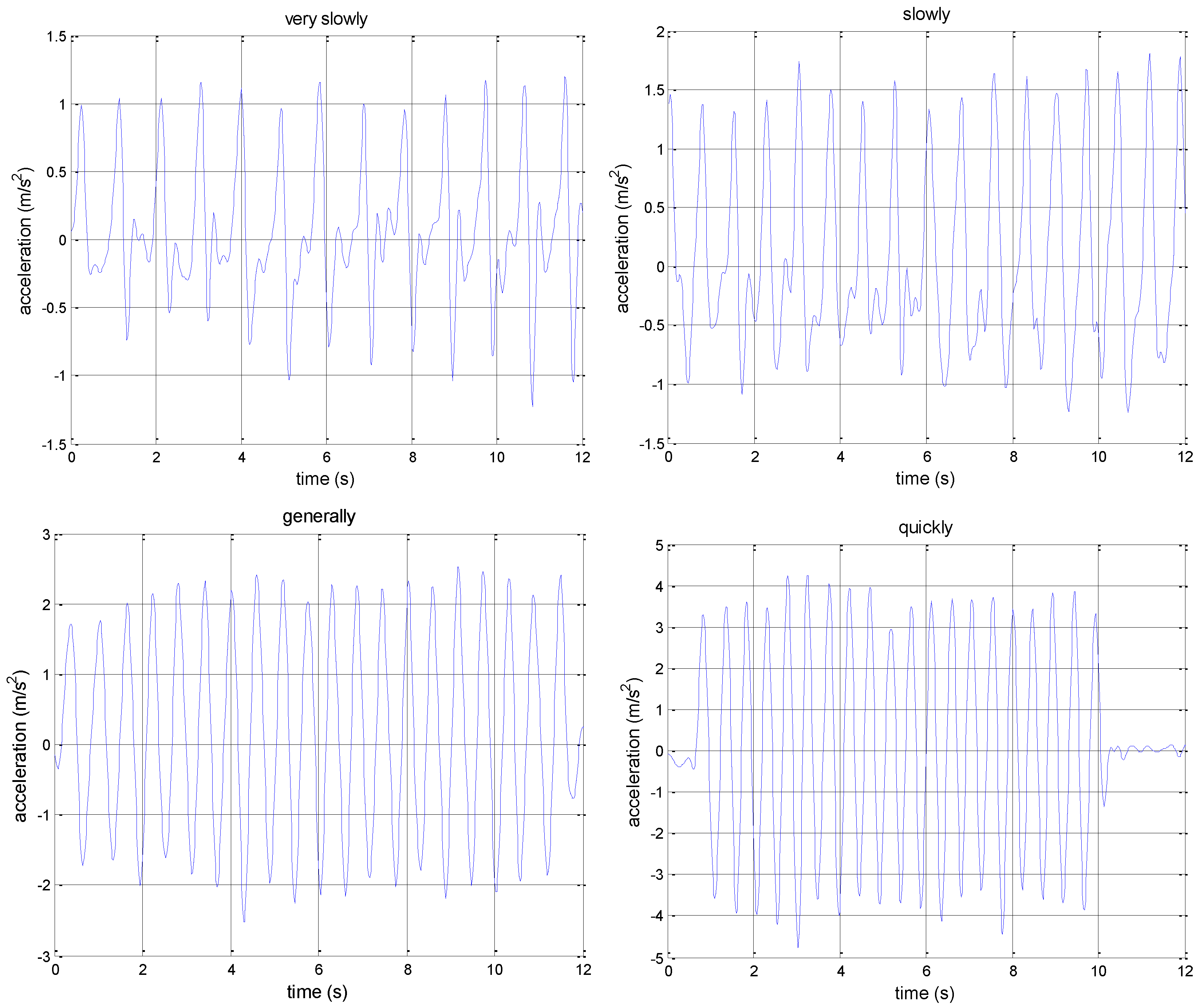
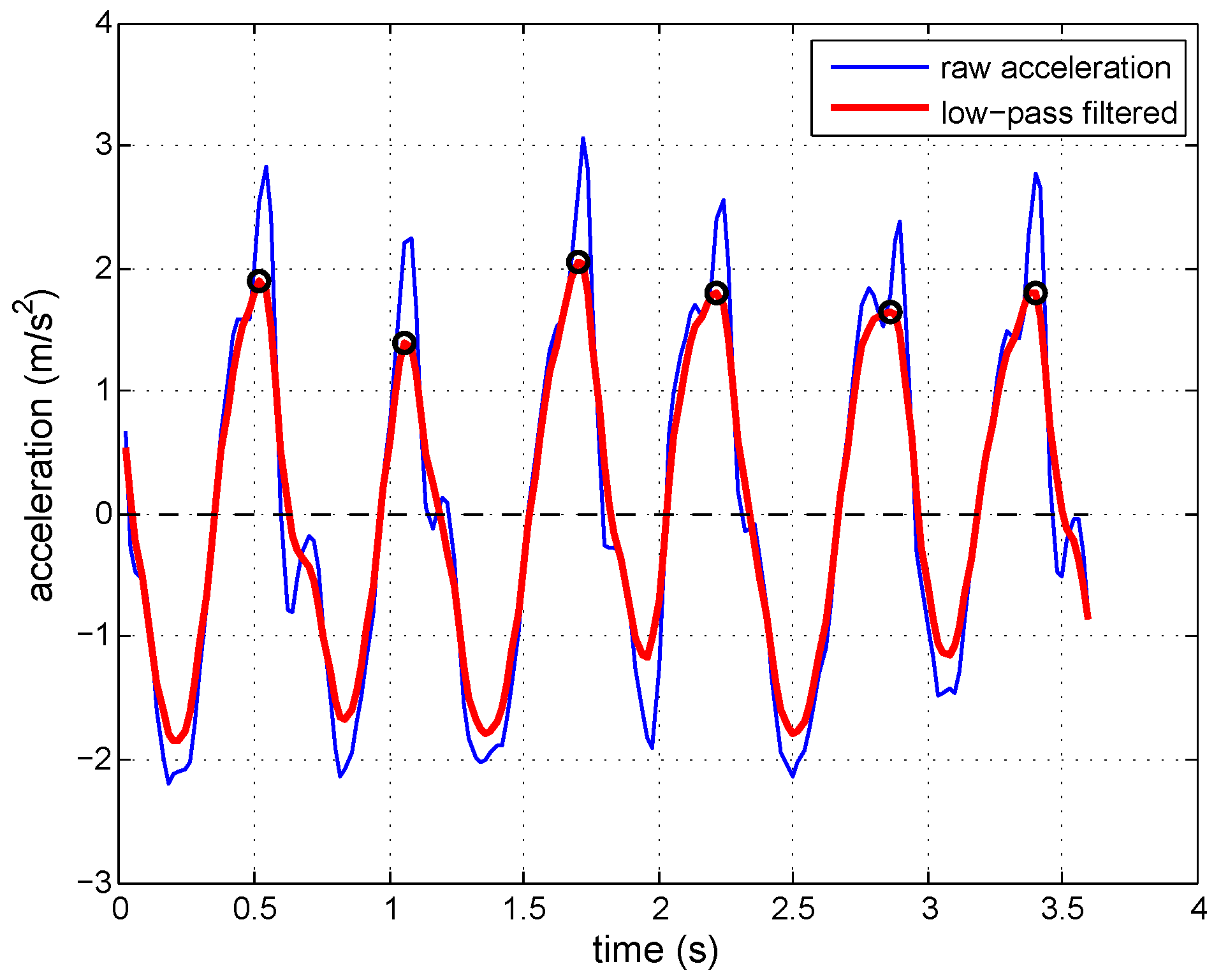
3.1.1. Step Detection
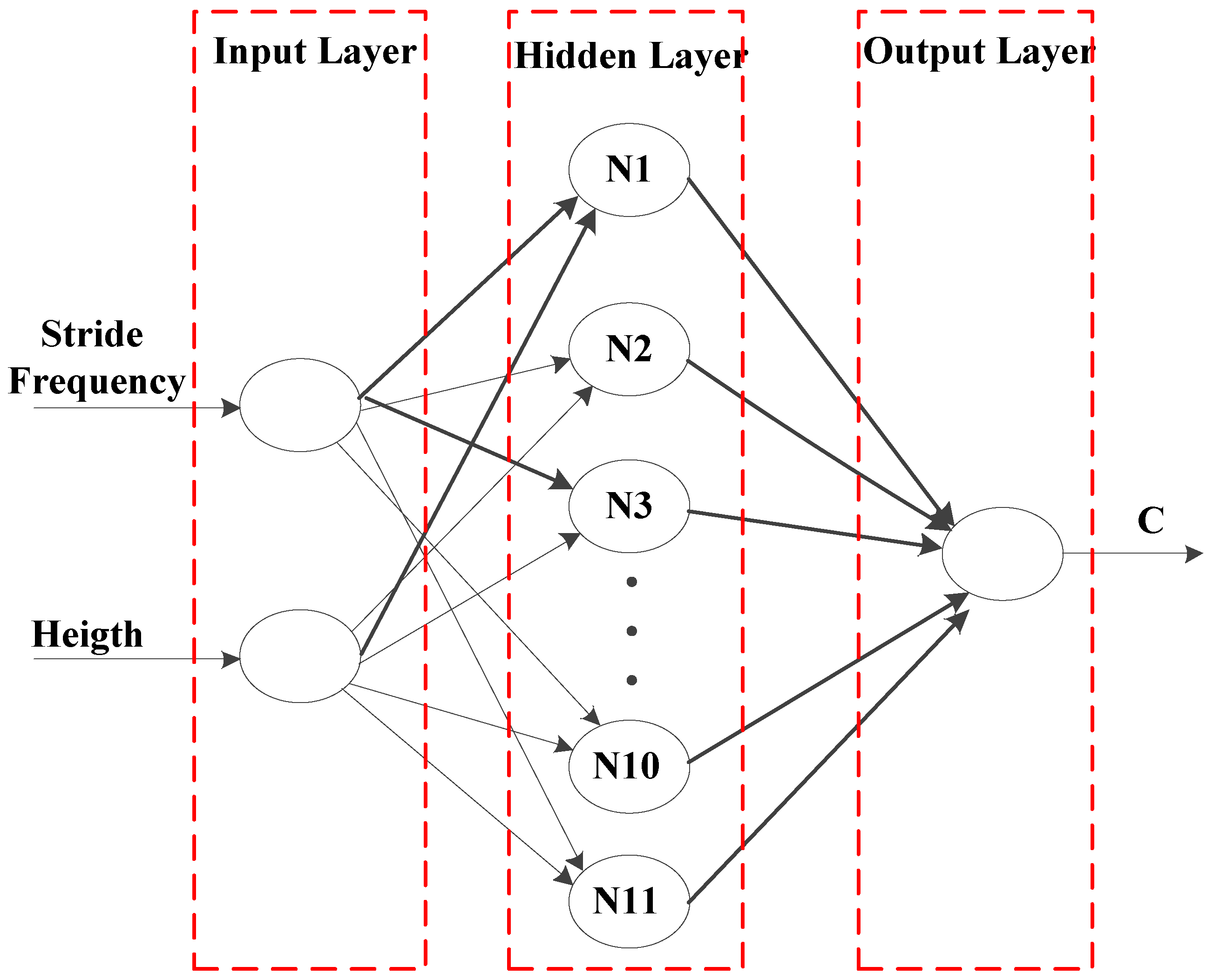
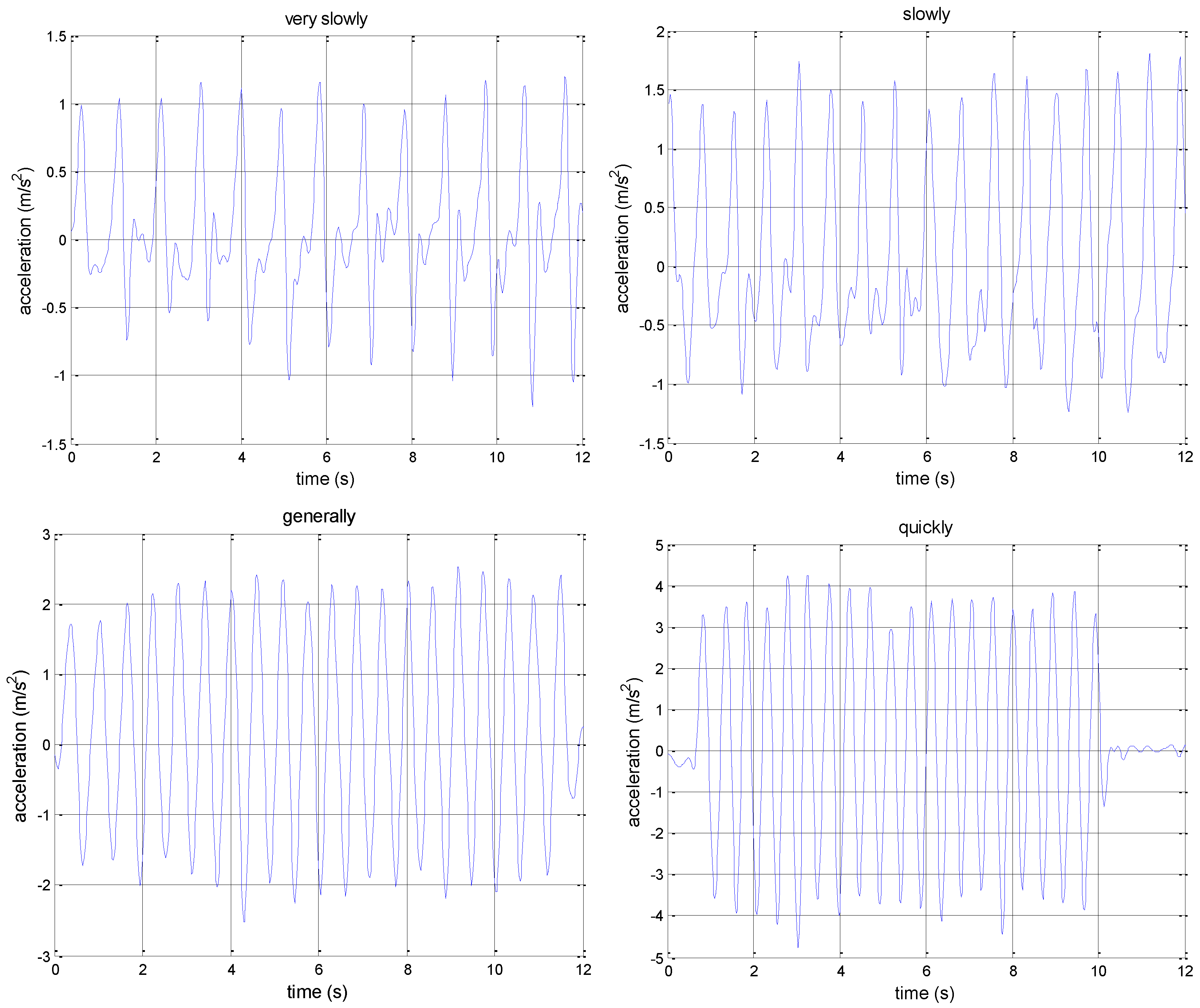
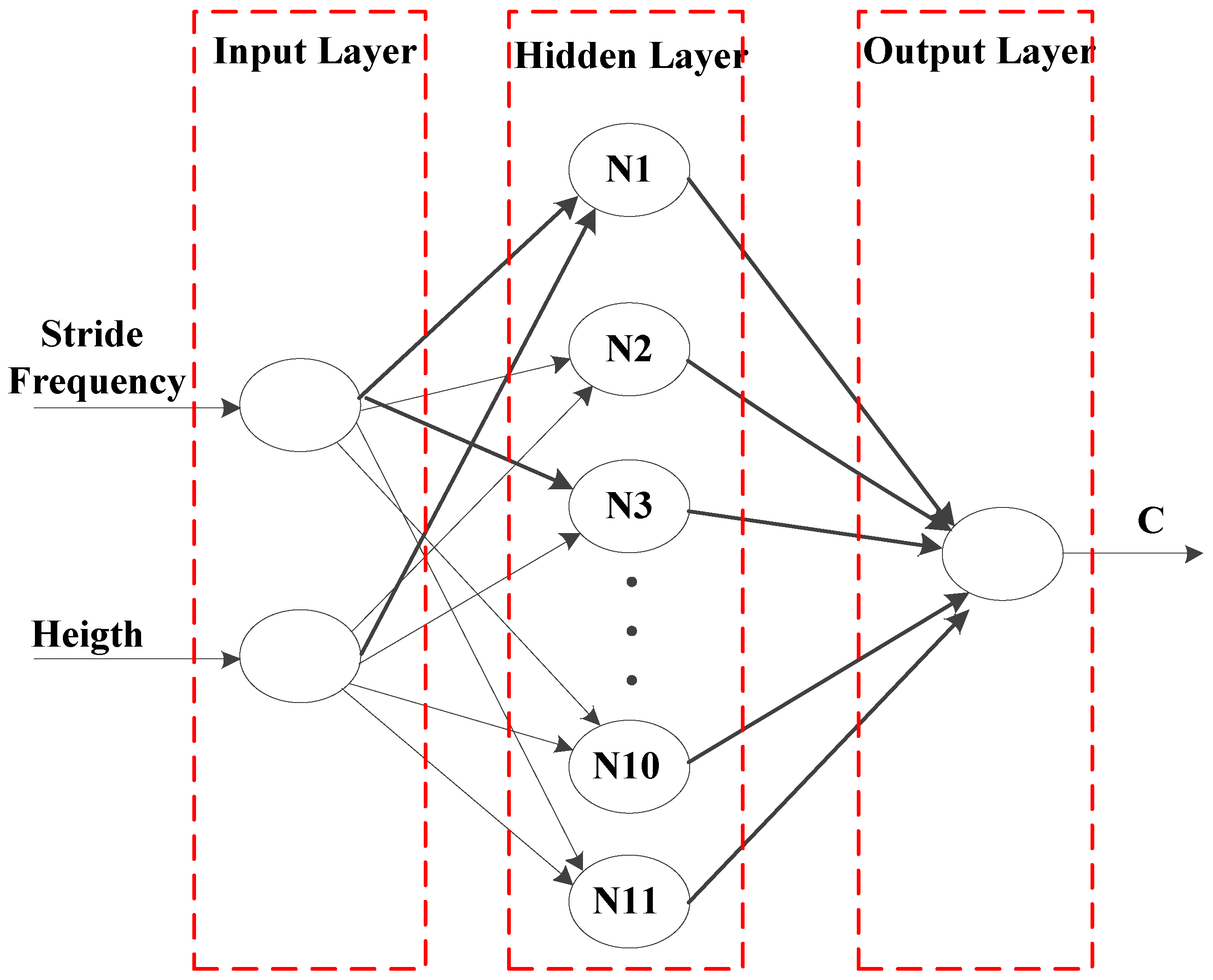
3.1.2. Stride Length Estimation
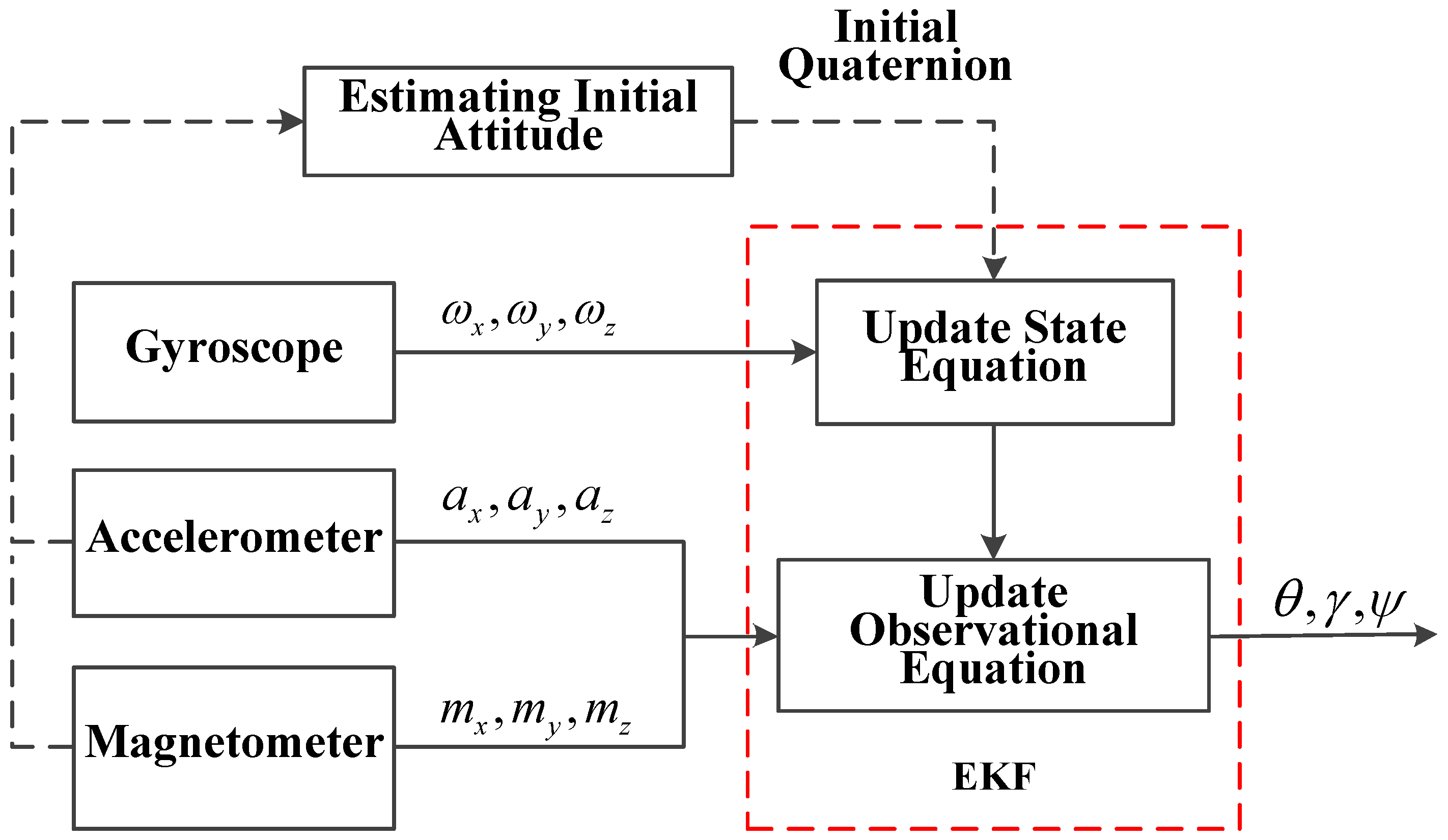
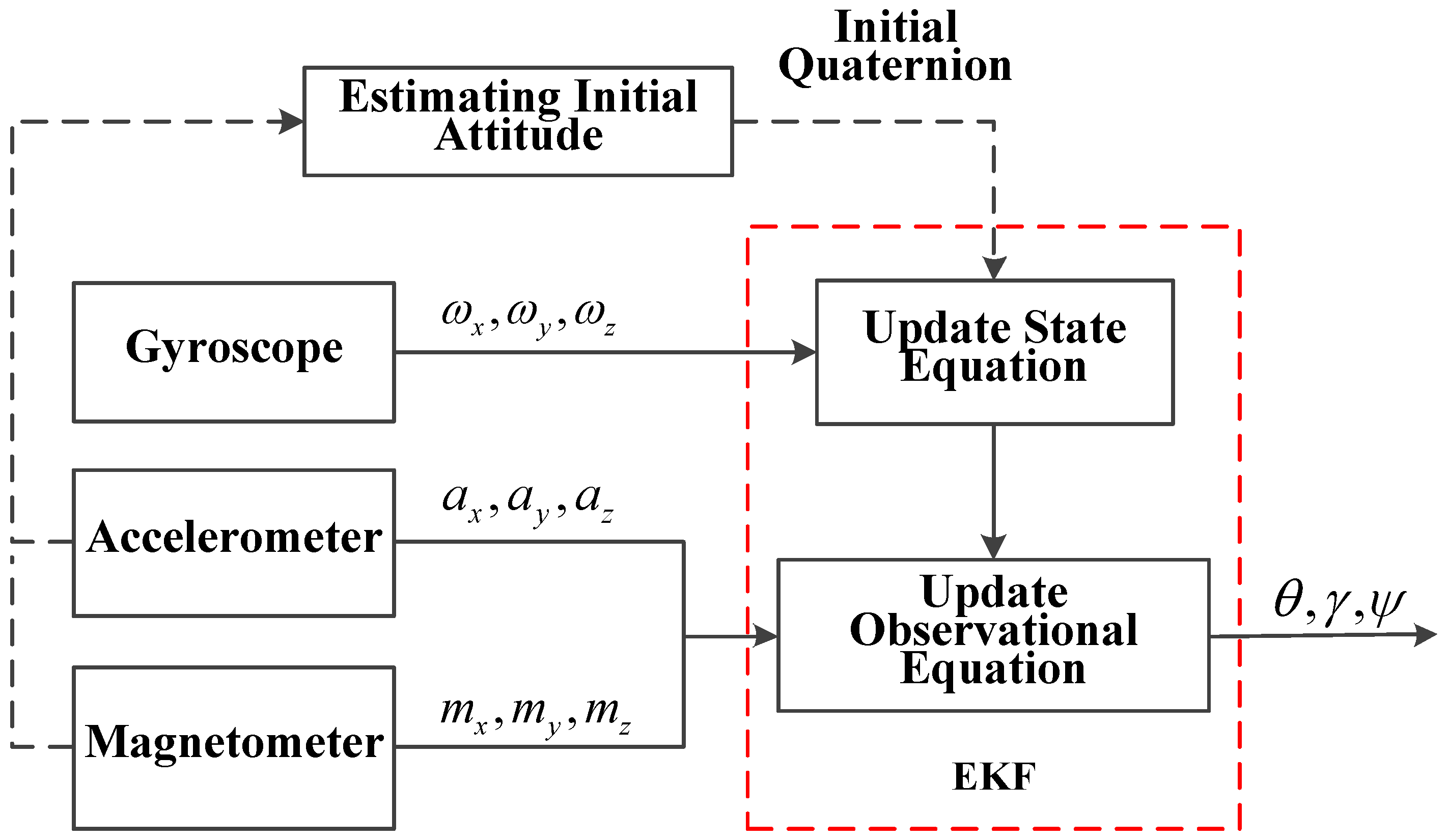
3.1.3. Attitude Estimation
3.1.4. Position Estimation
3.2. Data Synchronization
3.2.1. Space Synchronization
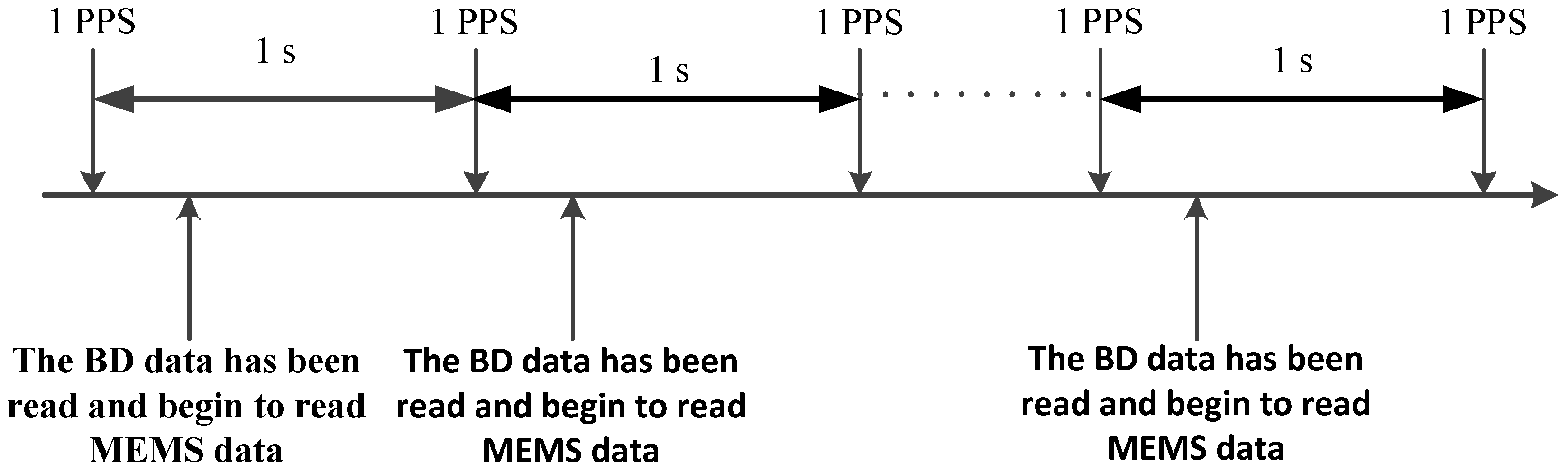
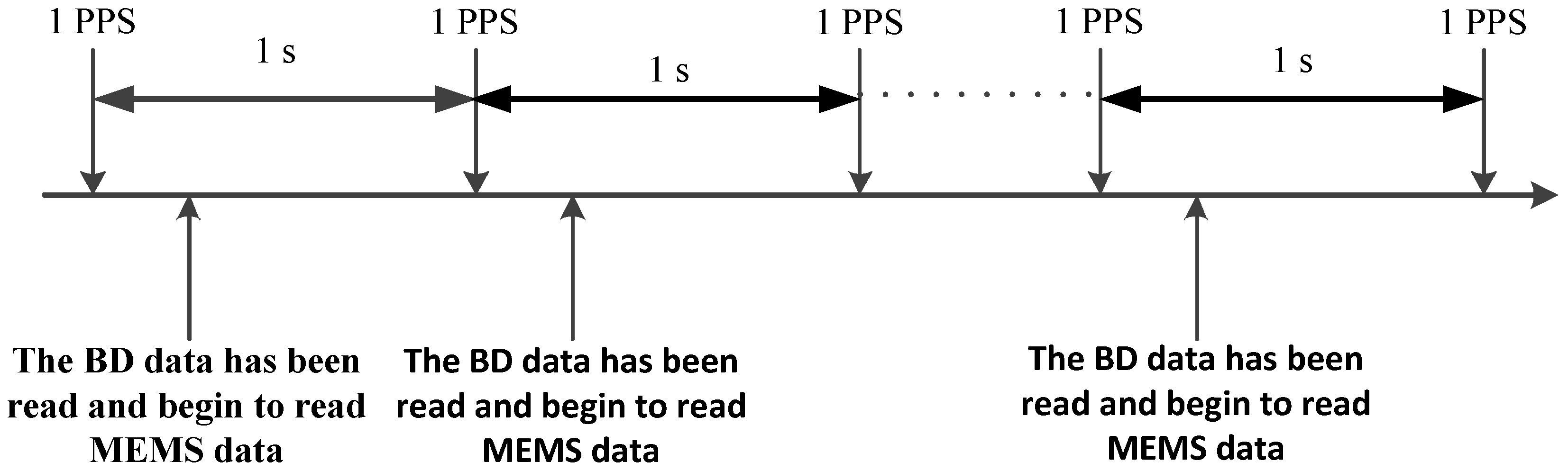
3.2.2. Time Synchronization
3.3. Tightly-Coupled Navigation System
3.3.1. System State Equation
3.3.2. System Observation Equation
3.3.3. Positioning
4. Experimental Results
4.1. Performance of Stride Length Estimation
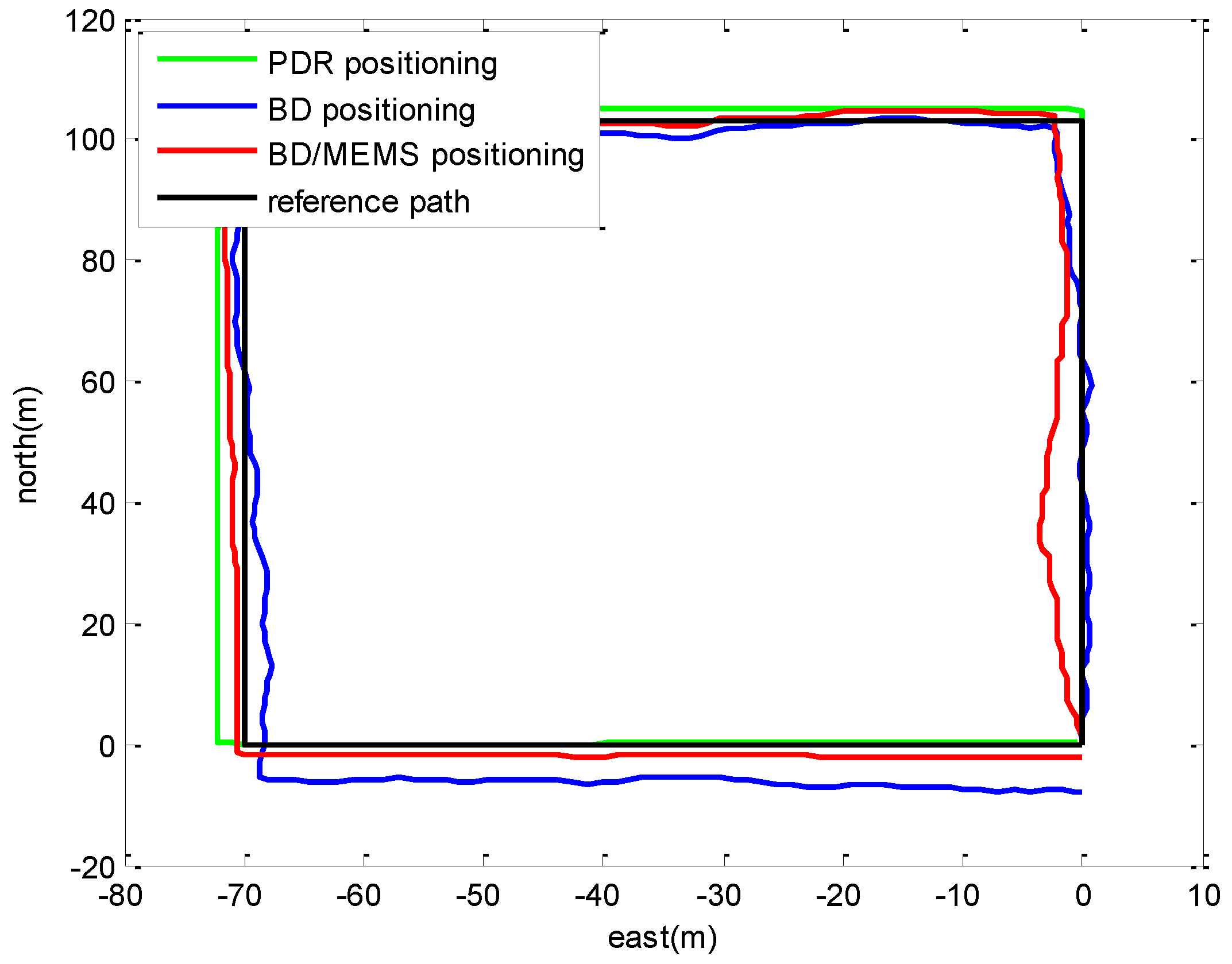
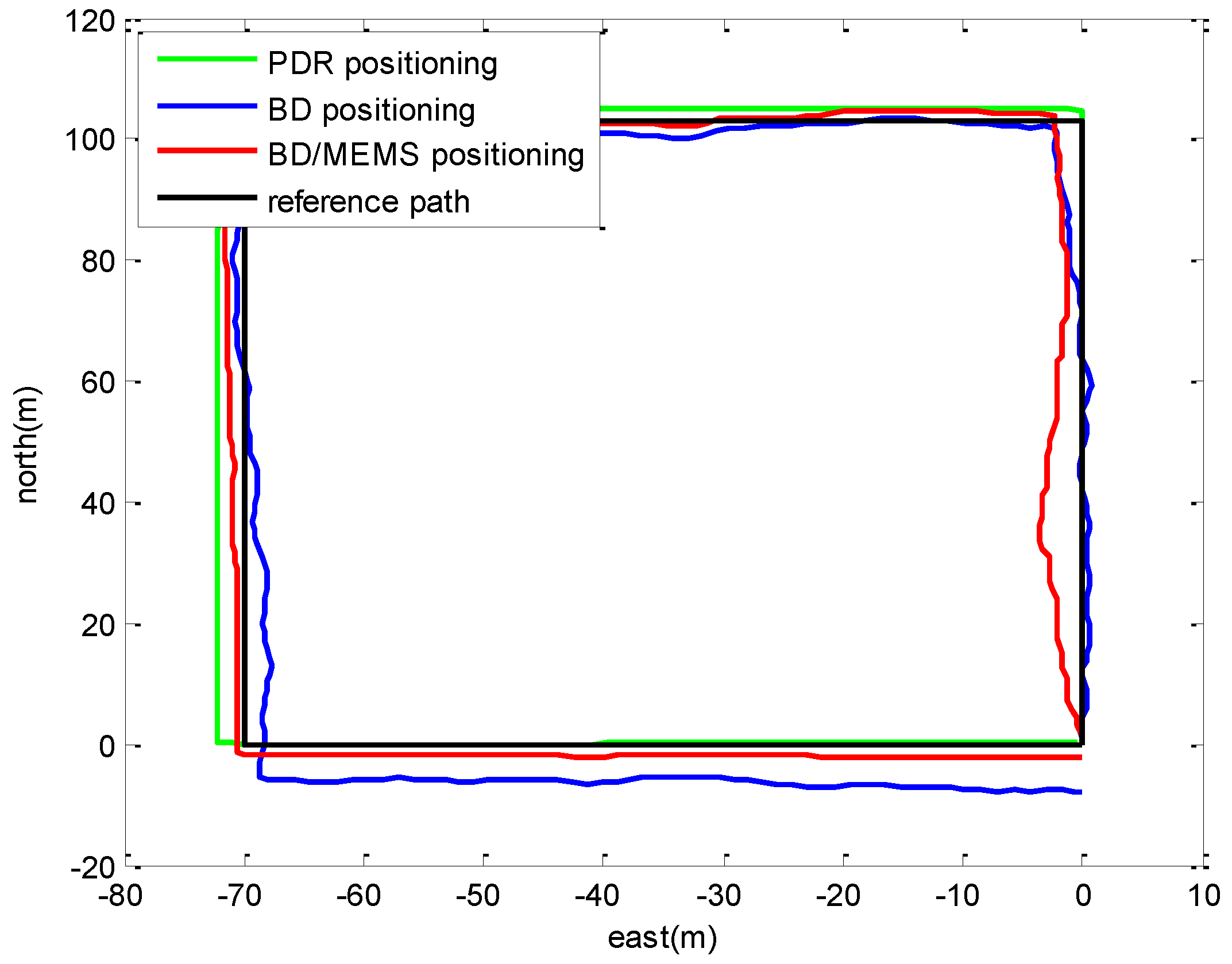
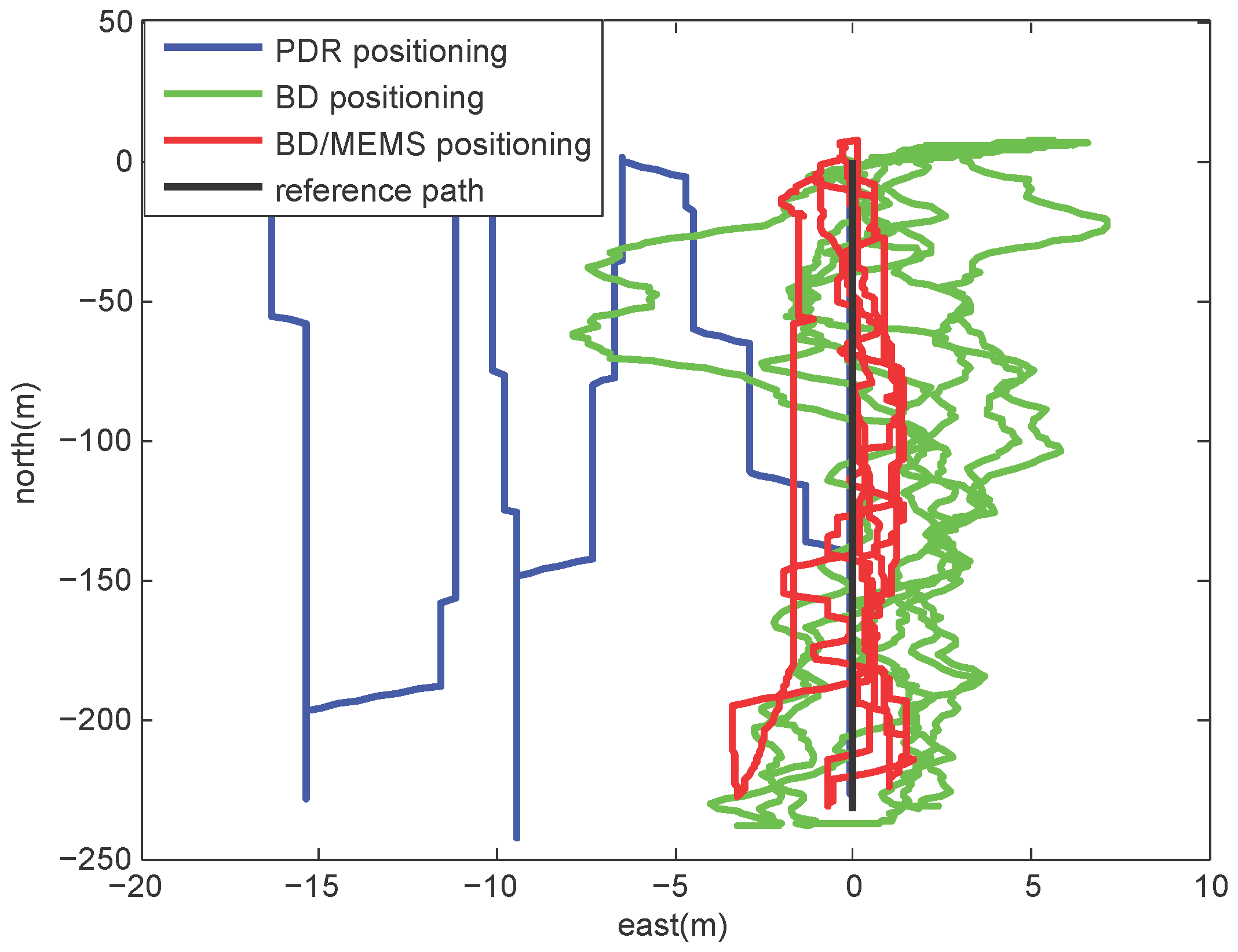
4.2. Positioning in a Playground Surrounded by Trees
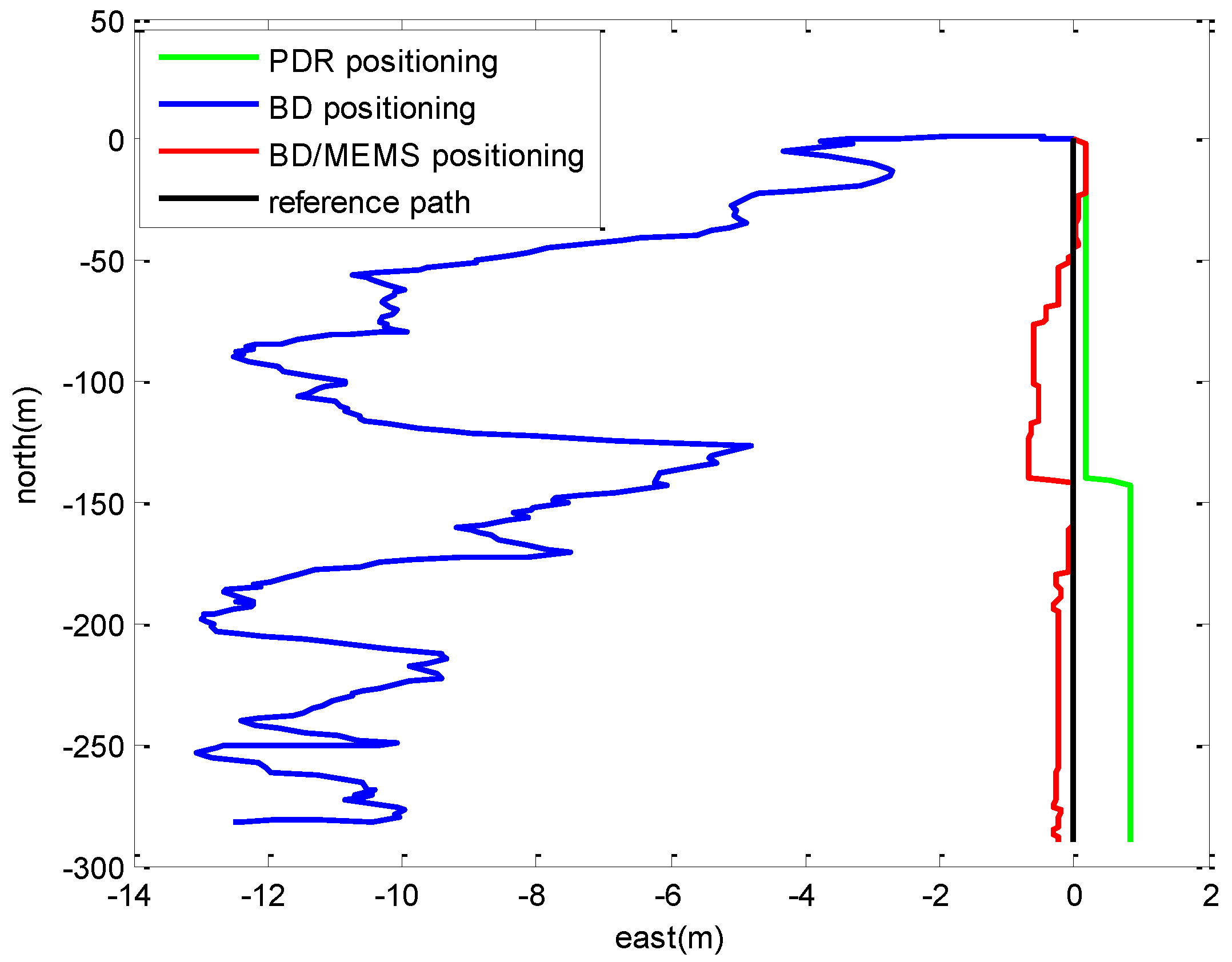
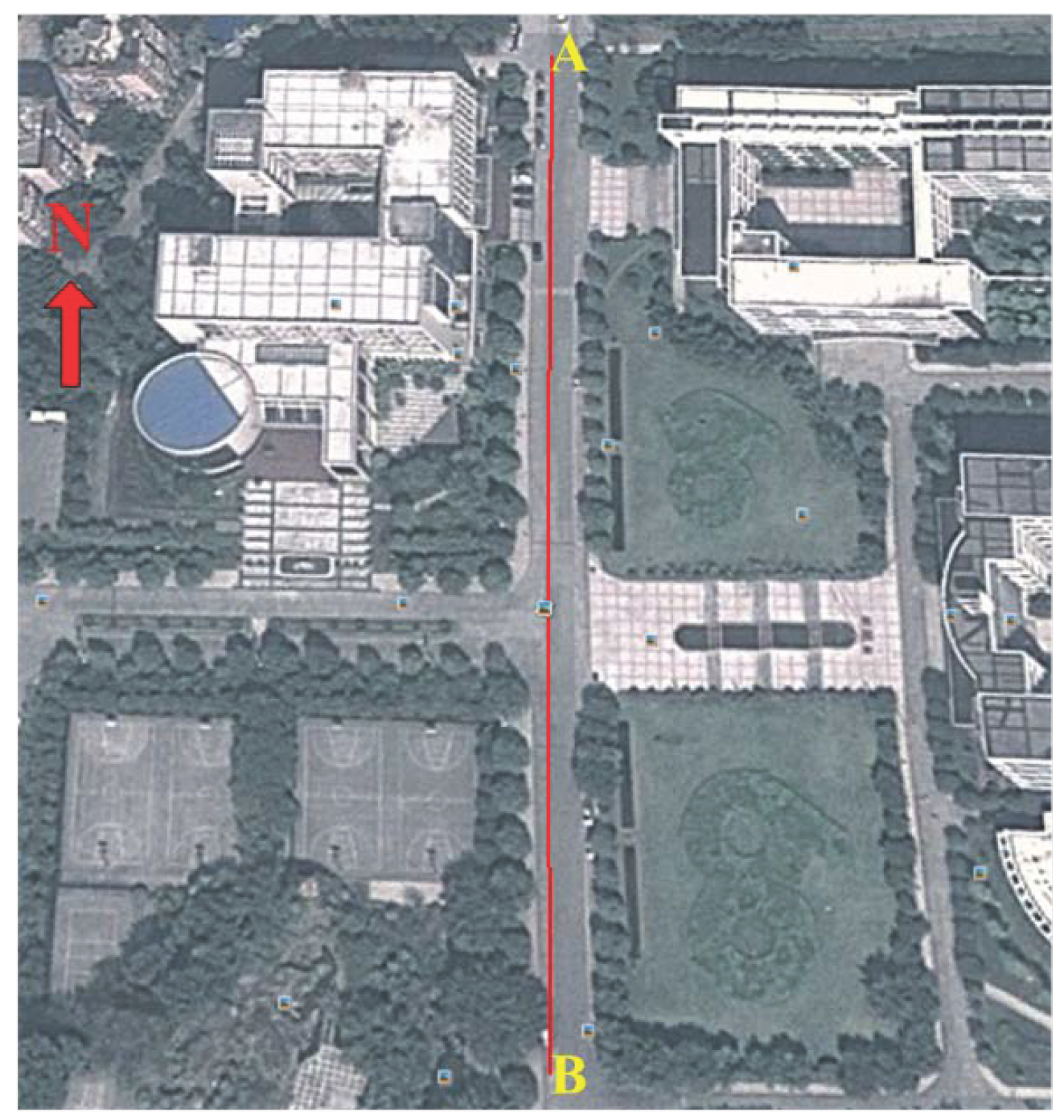
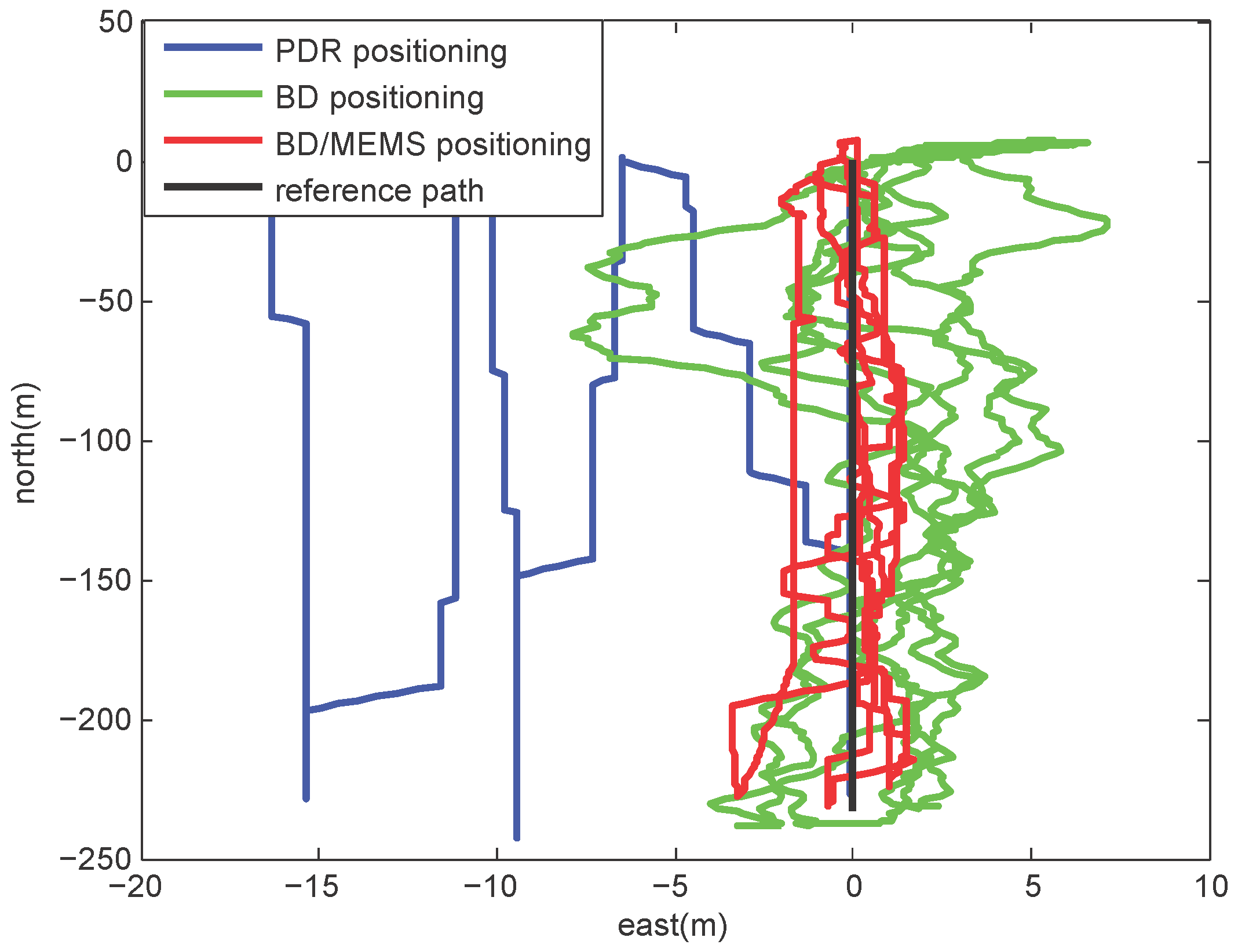
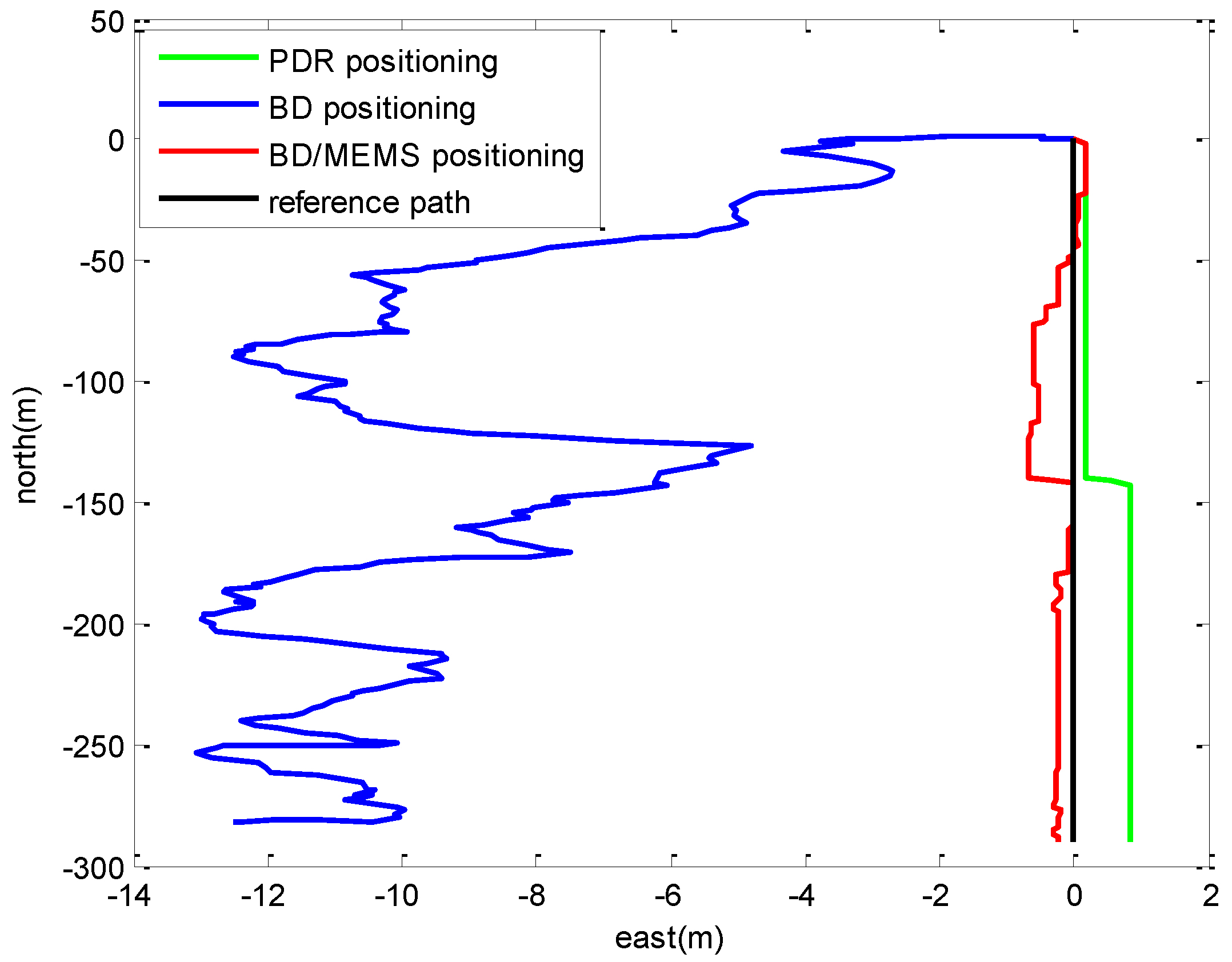
4.3. Positioning in a Thick Foliage Environment
4.4. Positioning in an Open Sky Environment for a Long Time
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kupper, A. Architectures and protocols for location services. In Location-Based Services: Fundamentals and Operation; John Wiley and Sons: New York, NY, USA, 2005; pp. 271–313. [Google Scholar]
- Zhen, J.; Jie, W.; Sabatino, P. GUI: GPS-Less traffic congestion avoidance in urban areas with inter-vehicular communication. In Proceedings of the 11th International Conference on Mobile Ad Hoc and Sensor Systems (MASS), Philadelphia, PA, USA, 27–30 October 2014; pp. 19–27.
- Flores, G.; Zhou, S.; Lozano, R.; Castillo, P. A vision and GPS-based real-time trajectory planning for MAV in unknown urban environments. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013; pp. 1150–1155.
- Mubarak, O.M.; Dempster, A.G. Beidou: A GPS alternative for Pakistan’s naval vessels. In Proceedings of the 10th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 15–19 January 2013; pp. 302–307.
- Rabaoui, A.; Viandier, N.; Duflos, E.; Marais, J.; Vanheeghe, P. Dirichlet process mixtures for density estimation in dynamic nonlinear modeling: application to GPS positioning in urban canyons. Signal Process. 2012, 60, 1638–1655. [Google Scholar] [CrossRef] [Green Version]
- Fang, Z.; Huang, H. Application of MEMS technology in military purpose equipment. ElectroMech. Eng. 2010, 26, 1–4. [Google Scholar]
- Yu, L.; Gao, Z.; Li, D. Hybrid particle filter for vehicle MEMS-INS. In Proceedings of the 2nd International Conference on Advanced Computer Control (ICACC), Shenyang, China, 27–29 March 2010; pp. 122–125.
- Hassansin, M.A.; Taha, M.M.R.; Noureldin, A. Automization of an INS/GPS intecrated system using genetic optimization. Autom. Congr. 2004, 16, 347–352. [Google Scholar]
- Niu, X.; Ban, Y.; Zhang, Q.; Zhang, T.; Zhang, H.; Liu, J. Quantitative Analysis to the Impacts of IMU Quality in GPS/INS Deep Integration. Micromachines 2015, 6, 1082–1099. [Google Scholar] [CrossRef]
- Schmidt, P.; Thoelert, S.; Furthner, J.; Meurer, M. Signal in space (SIS) analysis of new GNSS satellites. In Proceedings of the Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), Noordwijk, The Netherlands, 5–7 December 2012; pp. 1–8.
- Liang, G.; Li, F.; Zhang, X.; Chen, Y. Characteristic and anti-jamming performance of new generation GNSS signals. In Proceedings of the 2012 IEEE 14th International Conference on Communication Technology (ICCT), Chengdu, China, 9–11 November 2012; pp. 622–628.
- Kong, S. SDHT for fast detection of weak GNSS signals. Sel. Areas Commun. 2015, 33, 2366–2378. [Google Scholar] [CrossRef]
- Montillet, J.P.; Yu, K. Modified leaky LMS algorithms applied to satellite positioning. In Proceedings of the Vehicular Technology Conference, Vancouver, BC, Canada, 14–17 September 2014; pp. 1–5.
- Li, X.; Dick, G.; Lu, C.; Ge, M.; Nilsson, T.; Ning, T.; Wickert, J.; Schuh, H. Multi-GNSS meteorology: Real-time retrieving of atmospheric water vapor from BeiDou, Galileo, GLONASS, and GPS observations. Geosci. Remote Sens. 2015, 53, 6385–6393. [Google Scholar] [CrossRef]
- Perlmutter, M.; Robin, L. High-performance, low cost inertial MEMS: A market in motion. In Proceedings of the Position Location and Navigation Symposium (PLANS), Myrtle Beach, SC, USA, 23–26 April 2012; pp. 225–229.
- Vitanov, I.; Aouf, N. Fault diagnosis for MEMS INS using unscented Kalman filter enhanced by Gaussian process adaptation. In Proceedings of the Adaptive Hardware and Systems (AHS), Leicester, UK, 14–17 July 2014; pp. 120–126.
- Aggarwal, P.; Syed, Z.; El-Sheimy, N. Thermal calibration of low cost MEMS sensors for land vehicle navigation system. In Proceedings of the Vehicular Technology Conference, Singapore, Singapore, 11–14 May 2008; pp. 2859–2863.
- Akeila, E.; Salcic, Z.; Swain, A. Reducing low-cost INS error accumulation in distance estimation using self-resetting. Instrum. Measur. 2014, 64, 177–184. [Google Scholar] [CrossRef]
- Angrisano, A. GNSS/INS Integration Methods. Ph.D. Thesis, Universit degli Studi di NAPOLI Parthenop, Napoli, Italy, 2010. [Google Scholar]
- Zhuang, Y.; Chang, H.; El-Sheimy, N. A MEMS multi-sensors system for pedestrian navigation. In China Satellite Navigation Conference (CSNC) 2013 Proceedings; Springer: Berlin/Heidelberg, Germany, 2013; pp. 657–660. [Google Scholar]
- Jia, R.; Wu, C.; Zhi, Q.; Yu, B. Research on lower cost MEMS IMU and GPS integrating algorithm. In Proceedings of the 4th China Satellite Navigation Conference, Wuhan, China, 15–17 May 2013; pp. 130–134.
- Lachapelle, G.; Godha, S.; Cannon, M. Performance of integrated HSGPS-IMU technology for pedestrian navigation under signal masking. In Proceedings of the European navigation conference, Calgary, AB, Canada, 8–10 May 2006.
- Akca, T.; Demirekler, M. An adaptive unscented Kalman filter for tightly coupled INS/GPS integration. In Proceedings of the Position Location and Navigation Symposium (PLANS), Myrtle Beach, SC, USA, 23–26 April 2012; pp. 389–395.
- Clark, B.J.; Bevly, D.M. GPS/INS integration with fault detection and exclusion in shadowed environments. In Proceedings of the 2008 IEEE/ION Position Location and Navigation Symposium (PLANS), Monterey, CA, USA, 5–8 May 2008; pp. 1–8.
- Chu, H.; Tsai, G.; Chiang, K.; Duong, T. GPS/MEMS INS data fusion and map matching in urban areas. Sensors 2013, 13, 11280–11288. [Google Scholar] [CrossRef] [PubMed]
- Godha, S.; Lachapelle, G.; Cannon, M.E. Integrated GPS/INS system for pedestrian navigation in a signal degraded environment. In Proceedings of the ION GNSS 2006, Calgary, AB, Canada, 26–29 September 2006; pp. 2151–2164.
- Godha, S.; Petovello, M.G.; Lachapelle, G. Performance analysis of MEMS IMU/HSGPS/magnetic sensor integrated system in urban canyons. In Proceedings of the ION GNSS 2005, Long Beach, CA, USA, 13–16 September 2005; pp. 1977–1990.
- O’Keefe, K.; Jiang, Y.; Petovello, M. An investigation of tightly-coupled UWB/low-cost GPS for vehicle-to-infrastructure relative positioning. In Proceedings of the 2014 IEEE Radar Conference, Cincinnati, OH, USA, 19–23 May 2014.
- Weinberg, H. Using the ADXL202 in pedometer and personal navigation applications. Analog Devices AN-602 Appl. Note 2002, 2, 1–6. [Google Scholar]
- Alvarez, D.; Gonzalez, R.C.; Lopez, A.; Alvarez, J.C. Comparison of step length estimators from wearable accelerometer devices. In Proceedings of the 28th Annual International Conference of the IEEE, Engineering in Medicine and Biology Society, New York, NY, USA, 30 August–3 September 2006; pp. 5964–5967.
- Shin, B.; Lee, J.H.; Lee, H. Indoor 3D pedestrian tracking algorithm based on PDR using smarthphone. In Proceedings of the 2012 12th International Conference on Control, Automation and Systems (ICCAS), JeJu Island, Korea, 17–21 October 2012; pp. 1442–1445.
- Liu, J.; Zhu, B. Application of BP neural network based on GA in function fitting. In Proceedings of the 2012 2nd International Conference on Computer Science and Network Technology (ICCSNT), Changchun, China, 29–31 December 2012; pp. 875–878.
- Valenti, R.G.; Dryanovski, I.; Xiao, J. A Linear Kalman Filter for MARG Orientation Estimation Using the Algebraic Quaternion Algorithm. Instrum. Measur. 2016, 65, 467–481. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Patterns | Accelerometer | Gyroscope | Magnetometer | ||
|---|---|---|---|---|---|
| Full Scale Range (g) | Sensitivity (LSB/mg) | Full Scale Range (g) | Sensitivity (LSB/mg) | Full Scale Range (g) | |
| 1 | ±2 | 16,384 | ±250 | 131 | ±1200 |
| 2 | ±4 | 8192 | ±500 | 65.5 | |
| 3 | ±6 | 4096 | ±1000 | 32.8 | |
| 4 | ±16 | 2048 | ±2000 | 16.4 | |
| Height | Models | |||||
|---|---|---|---|---|---|---|
| Walking Slowly | Walking Normally | Walking Quickly | ||||
| Adaptive Stride Length | Fixed Length | Adaptive Stride Length | Fixed Length | Adaptive Stride Length | Fixed Length | |
| 153 cm | 0.8 m | 3.8 m | 0.7 m | 3.5 m | 6.4 m | 12.3 m |
| 170 cm | 7.3 m | 7.9 m | 6.9 m | 5.0 m | 6.0 m | 12.2 m |
| 183 cm | 1.0 m | 8.5 m | 10.5 m | 18.5 m | 4.8 m | 19.5 m |
| Different Positioning Techonologies | RMS Errors in East (m) | RMS Errors in North (m) | RMS Errors (m) |
|---|---|---|---|
| BD/MEMS | 1.2290 | 0.9787 | 1.5710 |
| PDR | 1.2965 | 1.1766 | 1.7508 |
| BD | 0.8786 | 3.9074 | 4.0050 |
| Different Positioning Techonologies | RMS Errors in East (m) | RMS Errors in North (m) | RMS Errors (m) |
|---|---|---|---|
| BD/MEMS | 0.3402 | 0.8676 | 0.9302 |
| PDR | 0.6123 | 0.7403 | 0.9607 |
| BD | 9.7366 | 5.2195 | 11.0481 |
| Different Positioning Techonologies | RMS Errors in East (m) | RMS Errors in North (m) | RMS Errors (m) |
|---|---|---|---|
| BD/MEMS | 1.0545 | 1.2258 | 1.6854 |
| PDR | 8.0707 | 5.0884 | 9.8844 |
| BD | 2.8146 | 3.0804 | 5.5297 |
© 2016 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, T.; Zhang, Z.; Tian, Z.; Zhou, M. Low-Cost BD/MEMS Tightly-Coupled Pedestrian Navigation Algorithm. Micromachines 2016, 7, 91. https://doi.org/10.3390/mi7050091
Lin T, Zhang Z, Tian Z, Zhou M. Low-Cost BD/MEMS Tightly-Coupled Pedestrian Navigation Algorithm. Micromachines. 2016; 7(5):91. https://doi.org/10.3390/mi7050091
Chicago/Turabian StyleLin, Tianyu, Zhenyuan Zhang, Zengshan Tian, and Mu Zhou. 2016. "Low-Cost BD/MEMS Tightly-Coupled Pedestrian Navigation Algorithm" Micromachines 7, no. 5: 91. https://doi.org/10.3390/mi7050091