
Variable-Focus Liquid Lens Integrated with a Planar Electromagnetic Actuator


Abstract
:1. Introduction
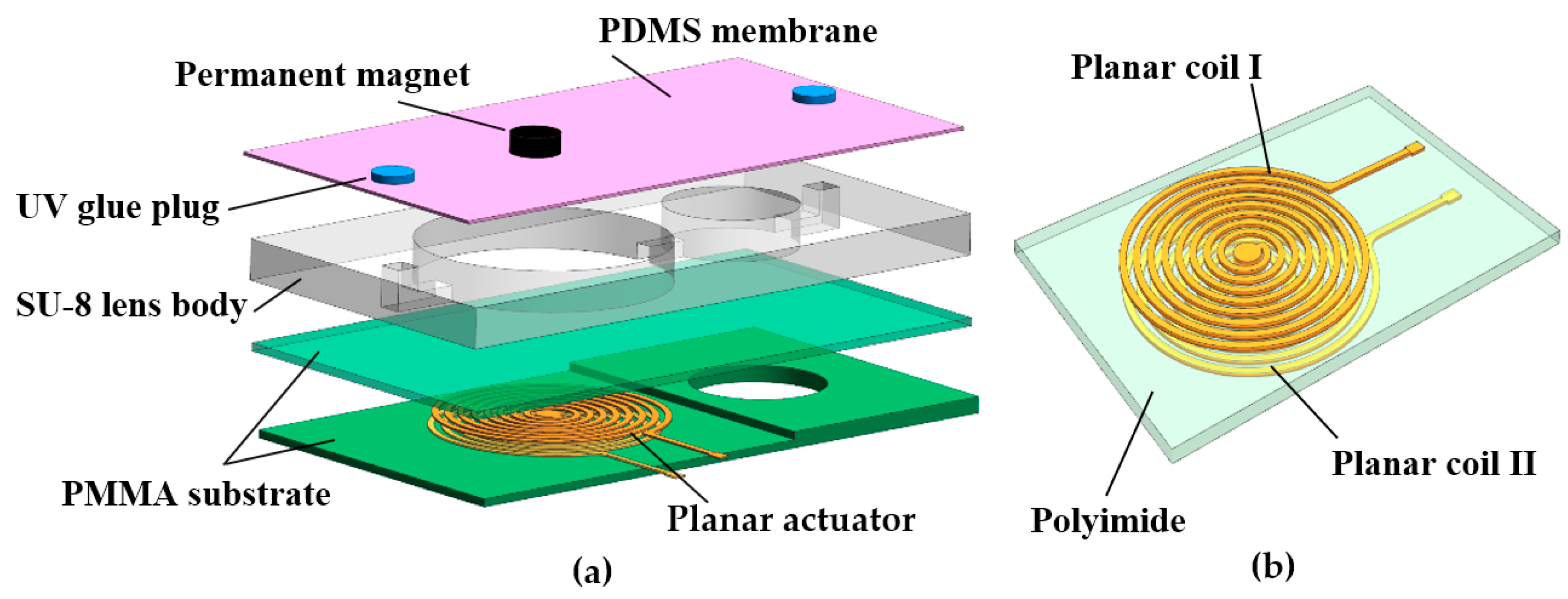
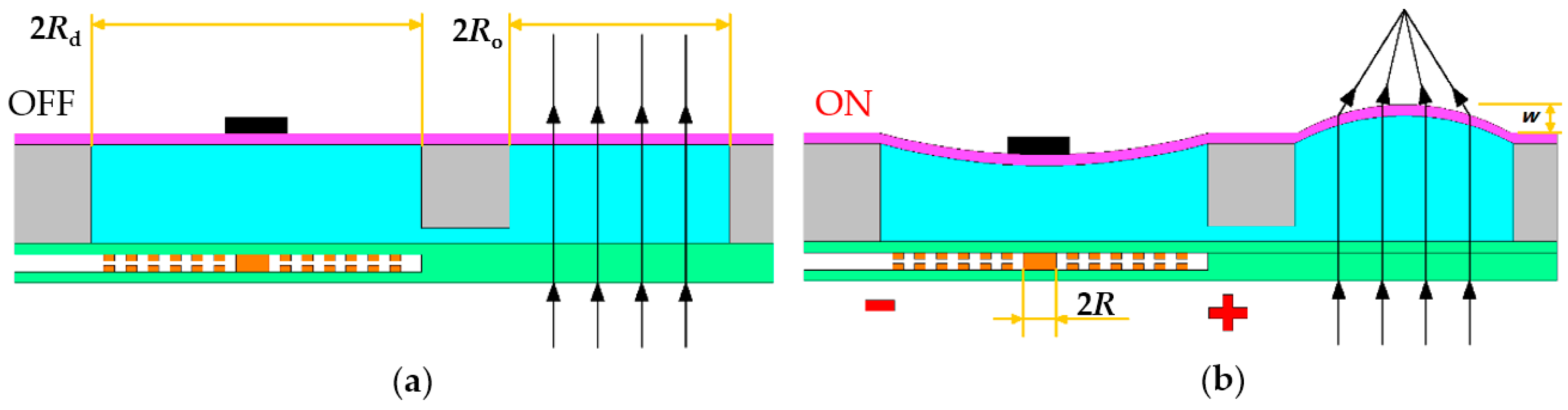
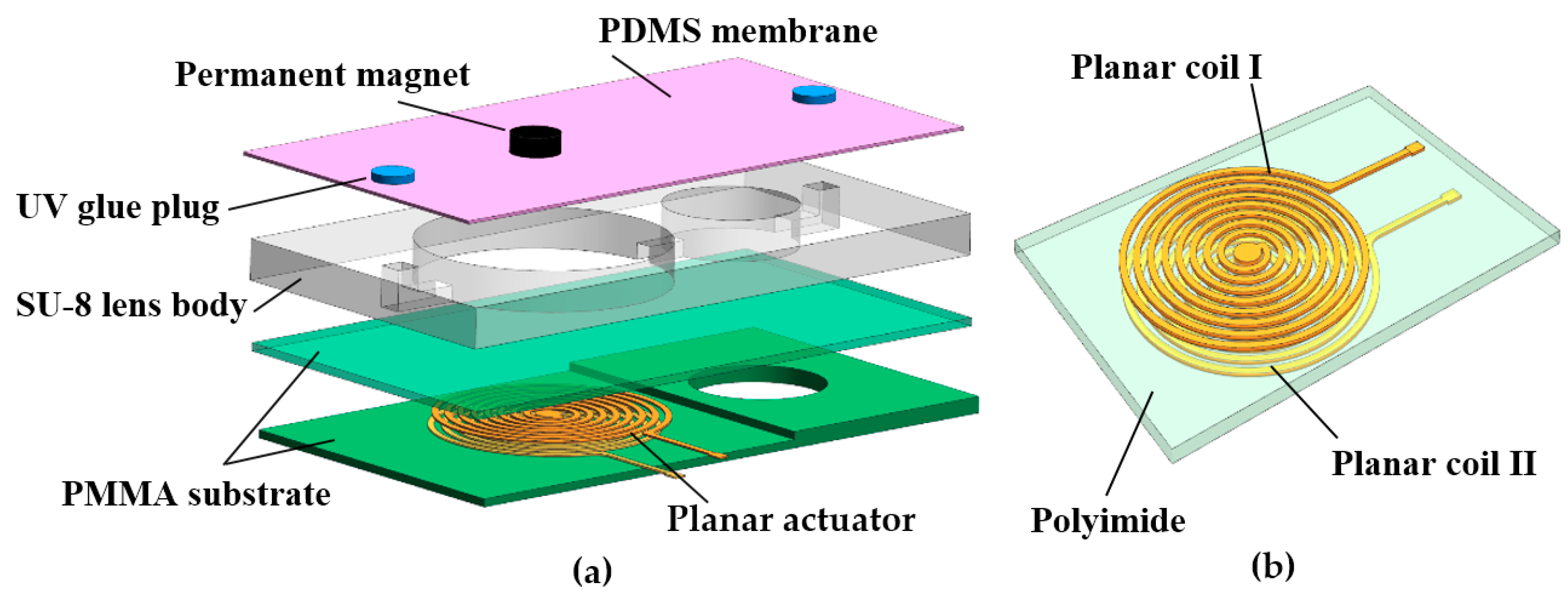
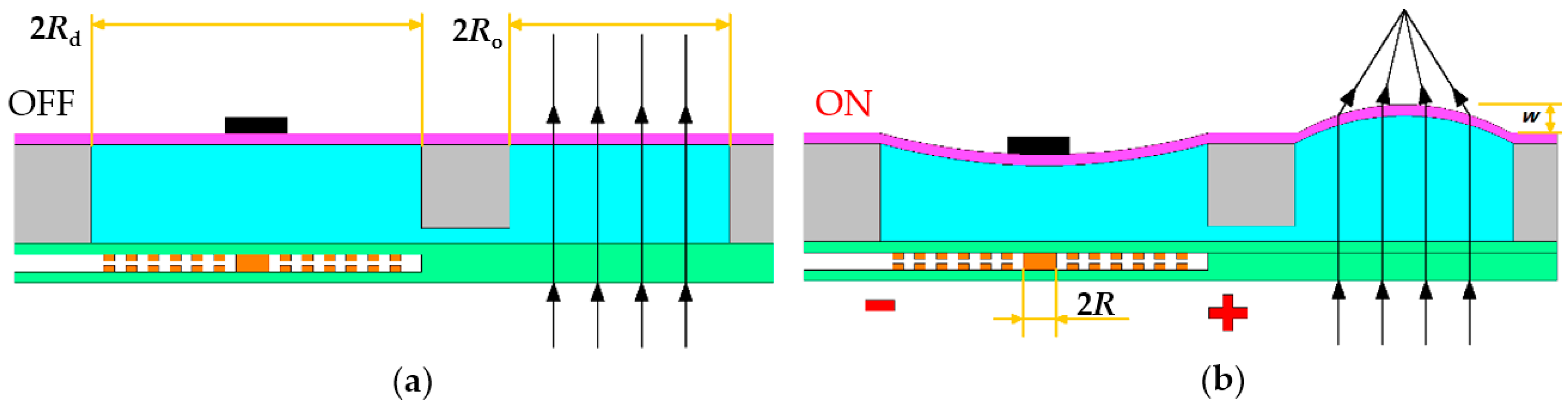
2. Device Structure and Mechanism
3. Fabrication
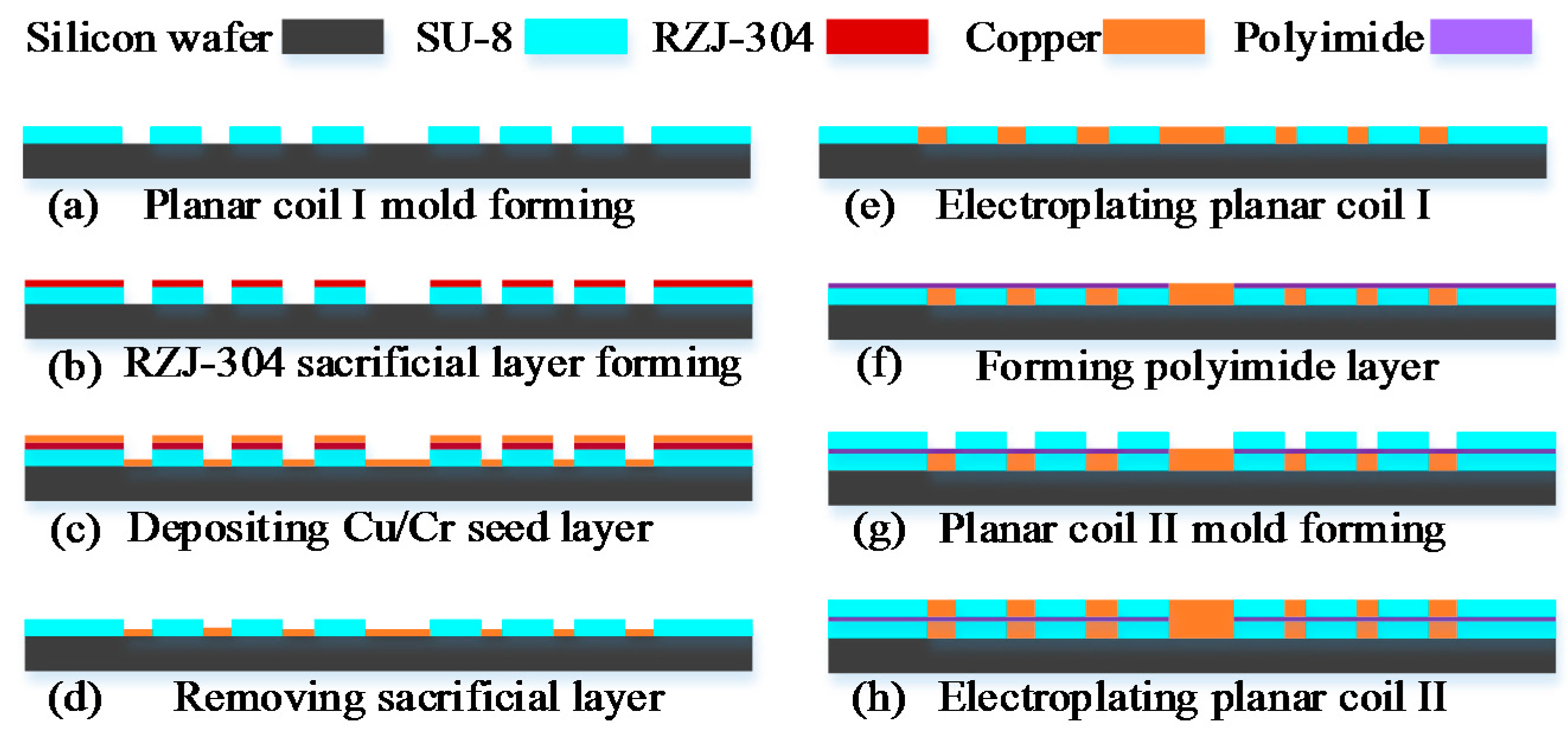
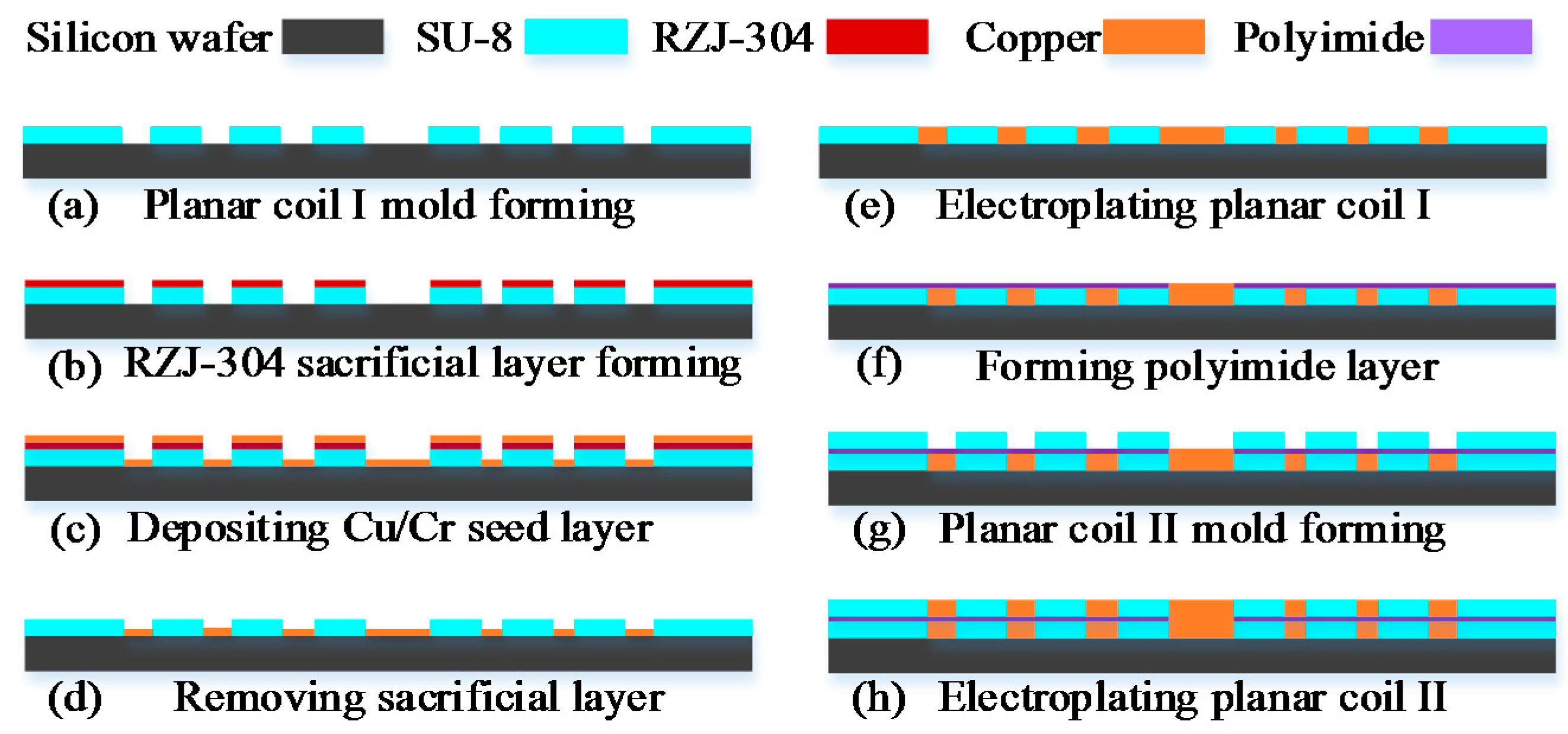
3.1. The Fabrication of the Planar Electromagnetic Actuator
3.2. The Fabrication of Lens Body
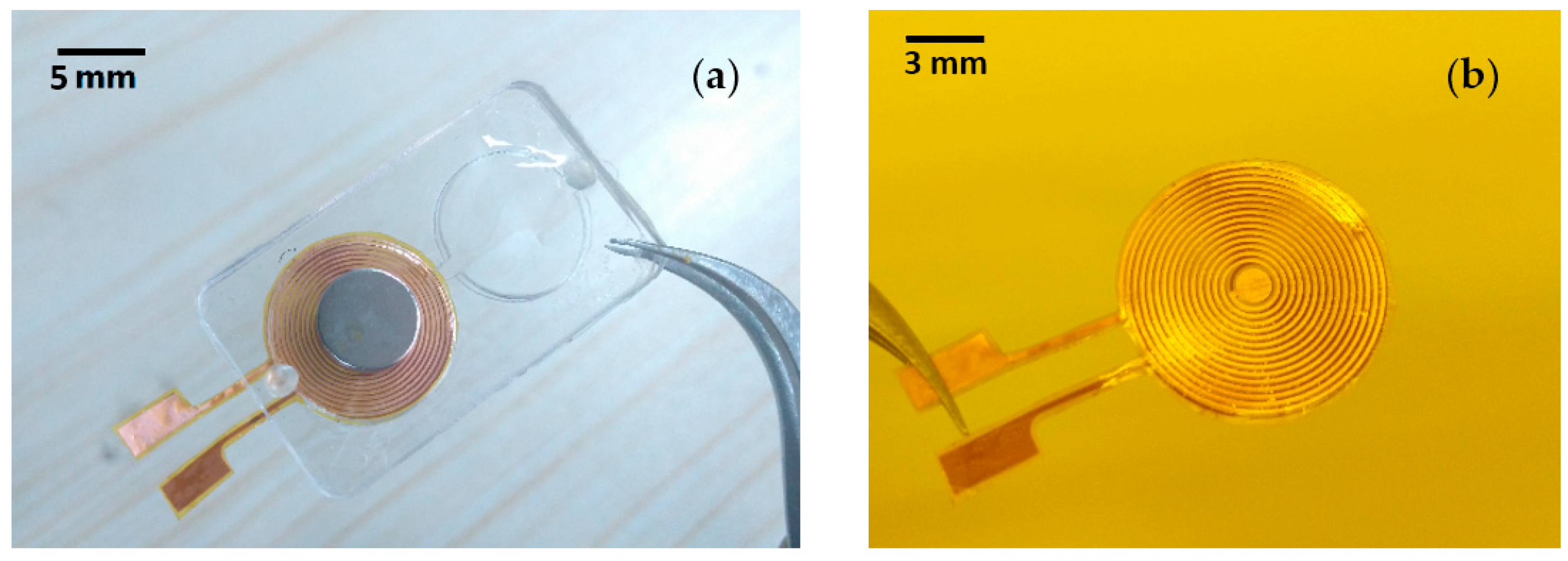
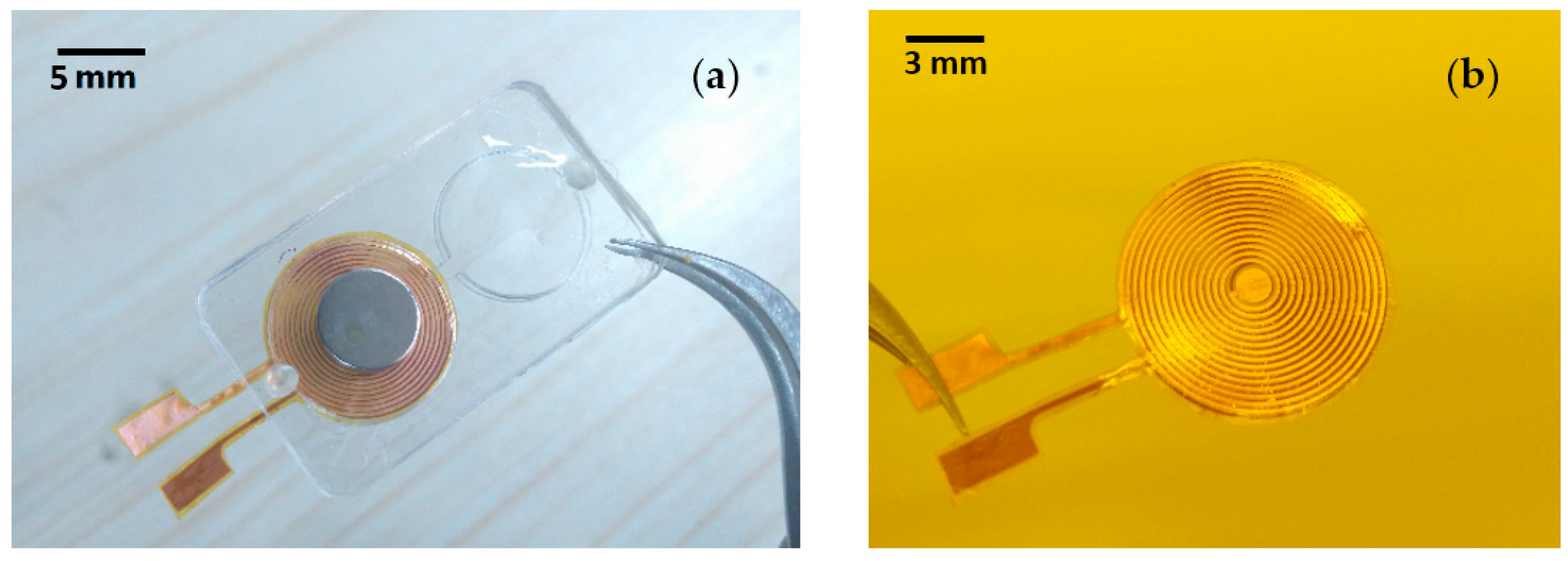
3.3. Assembly
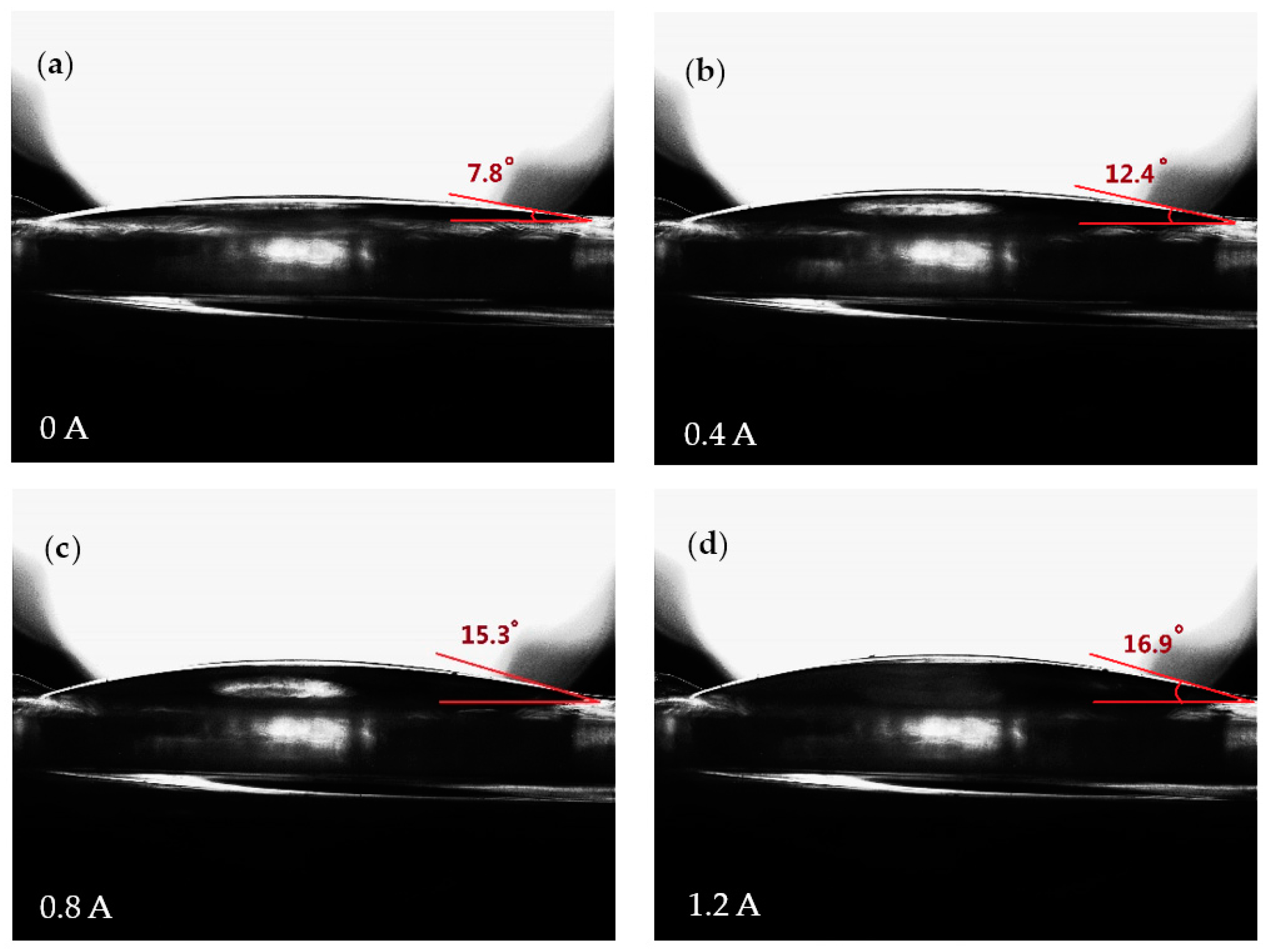
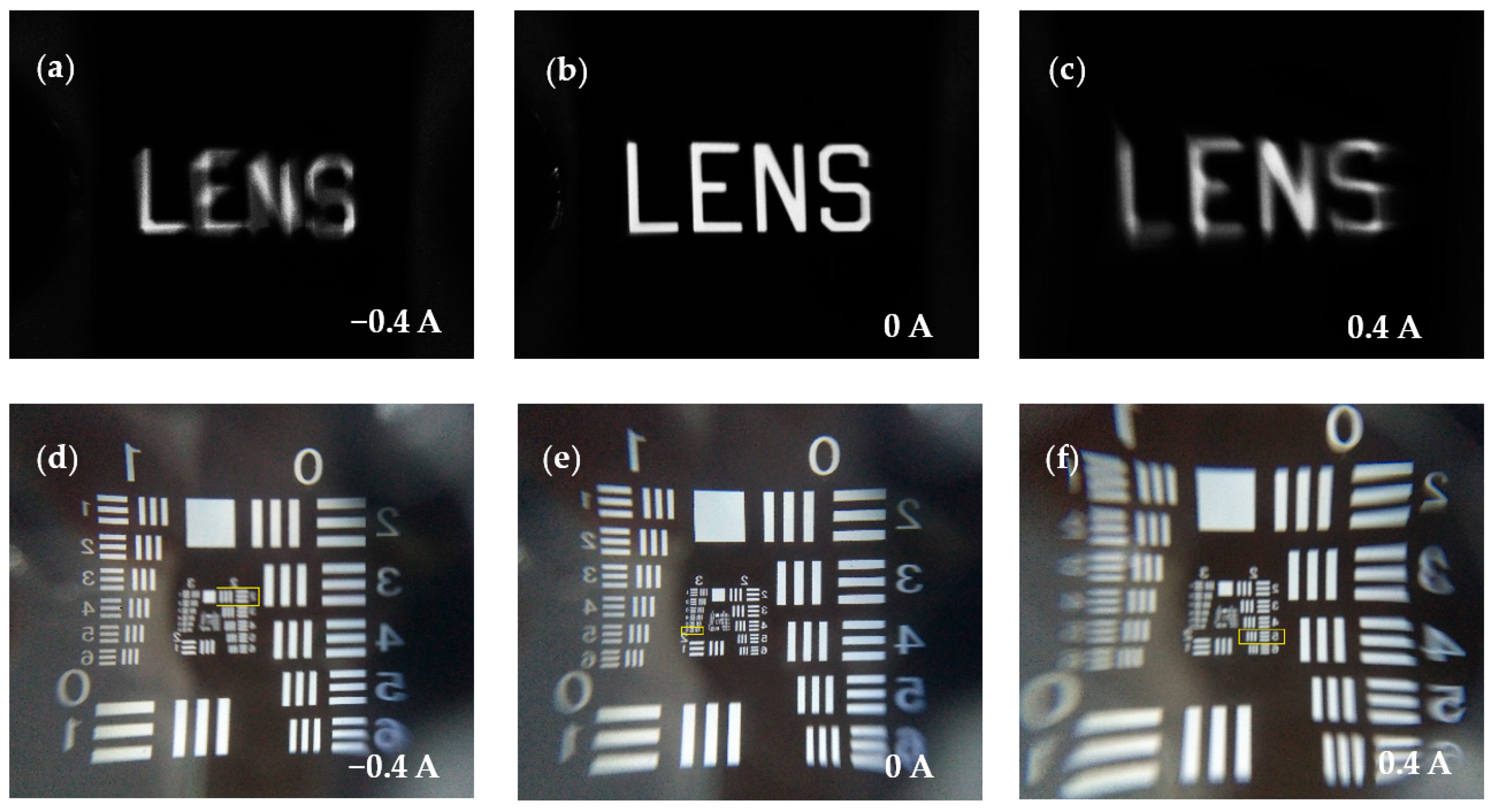
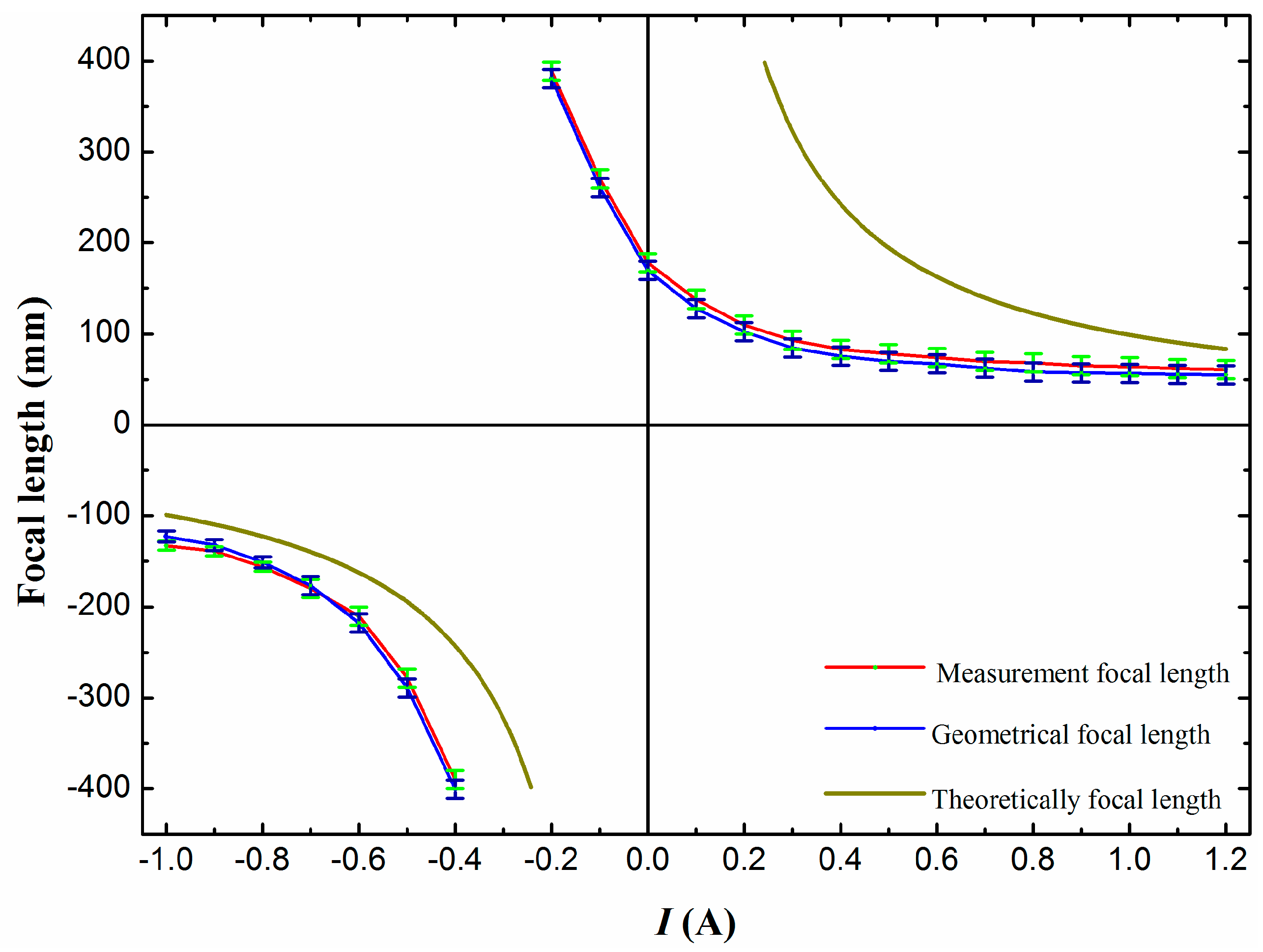
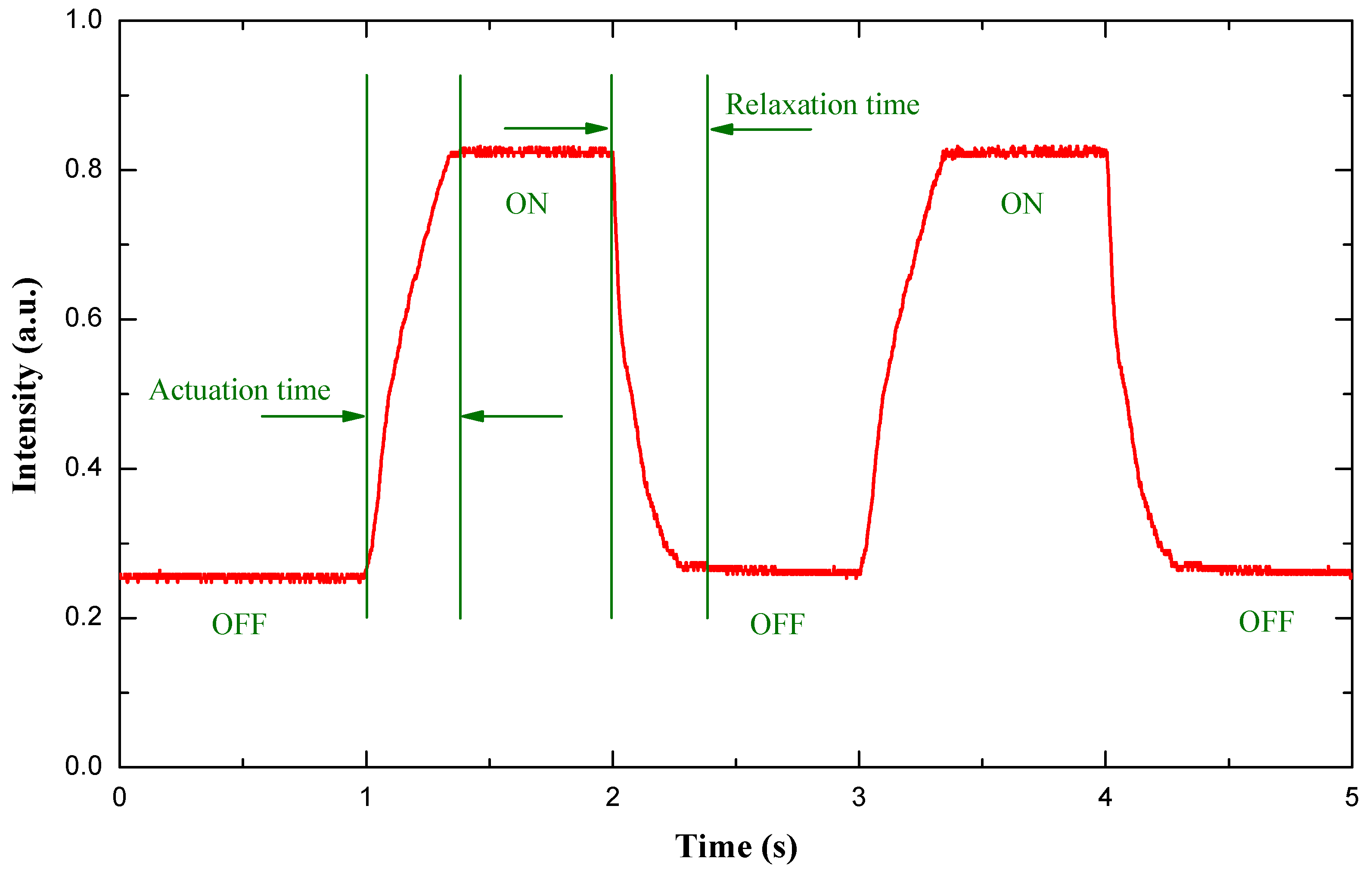
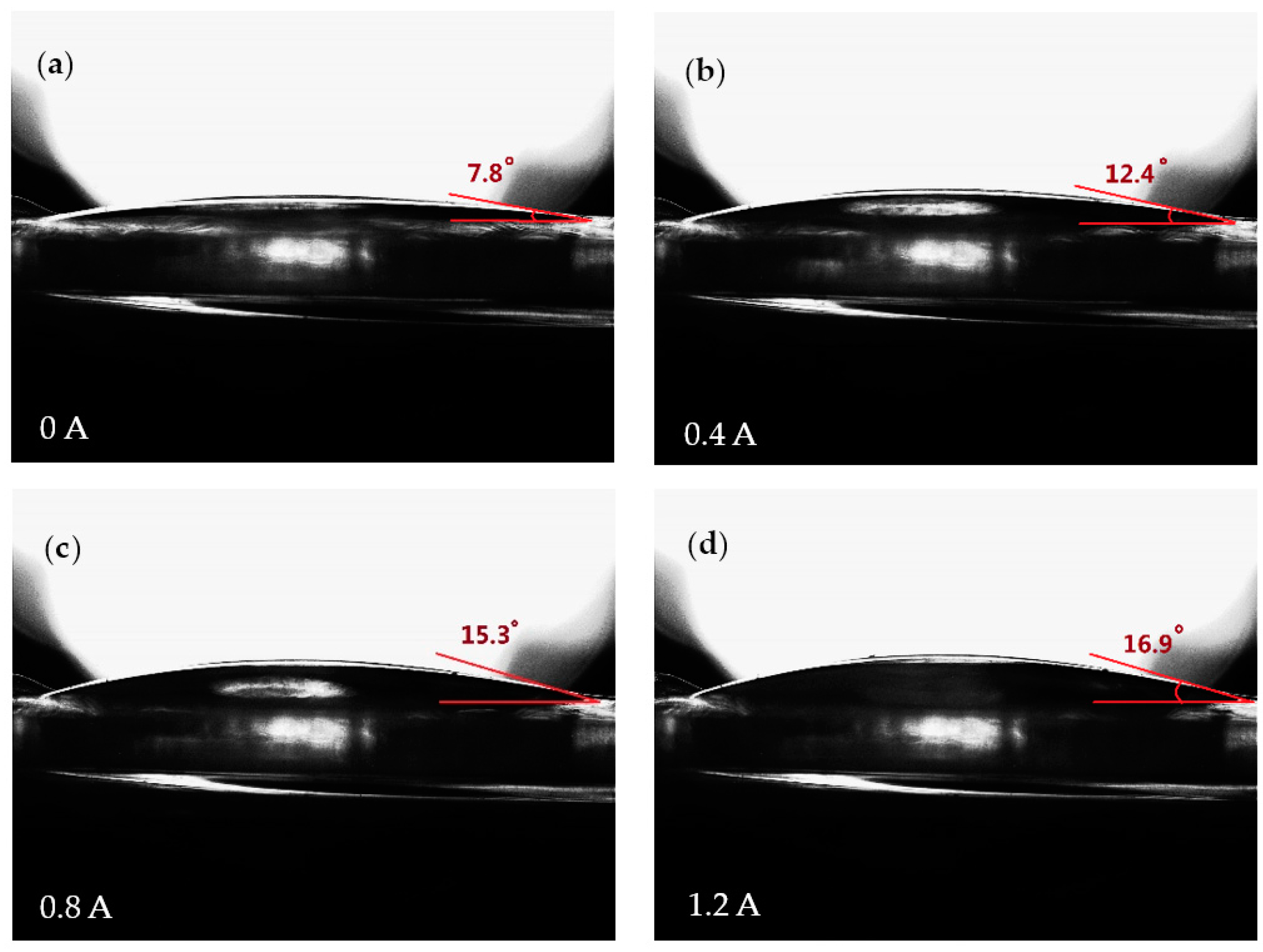
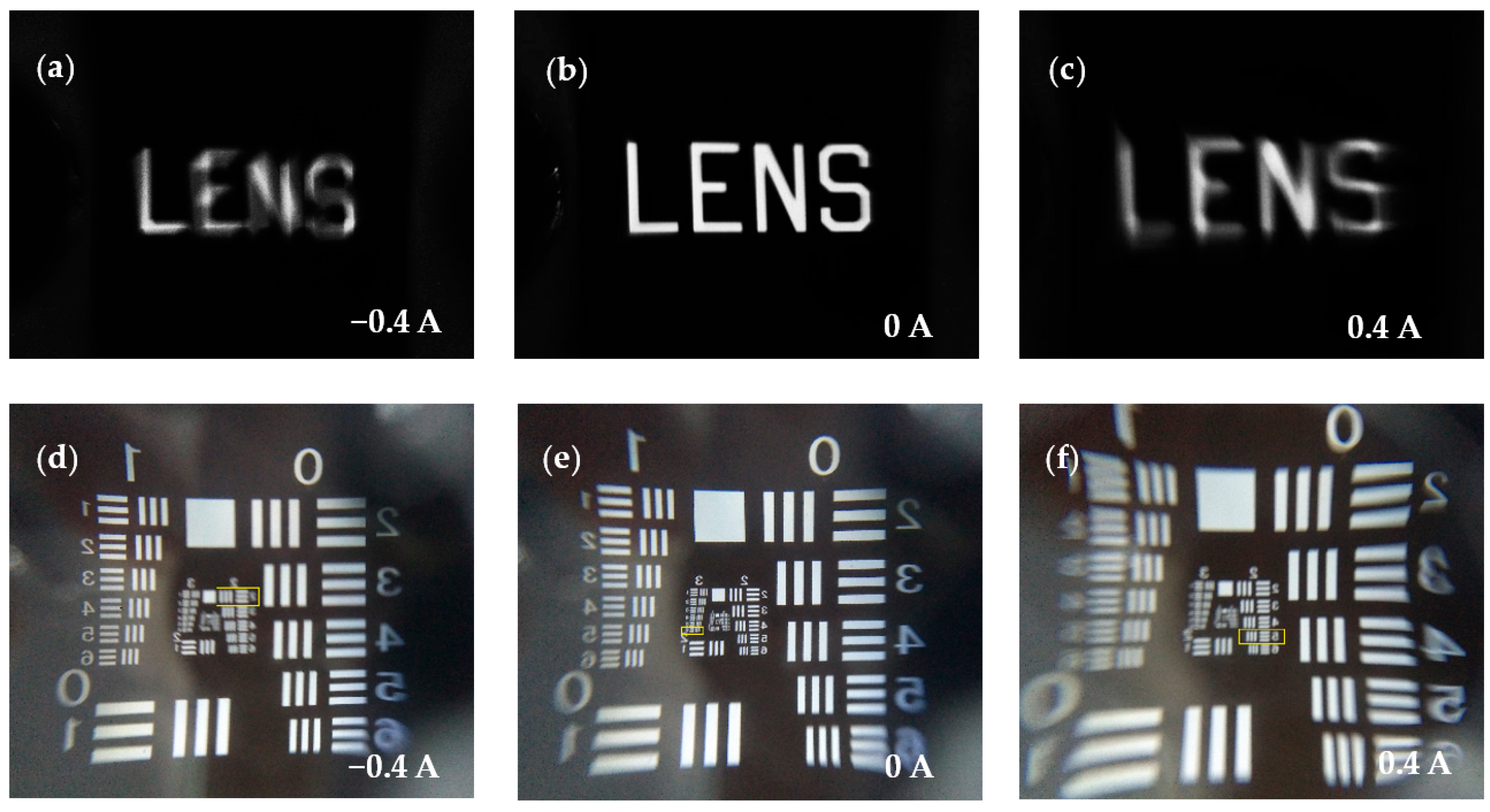
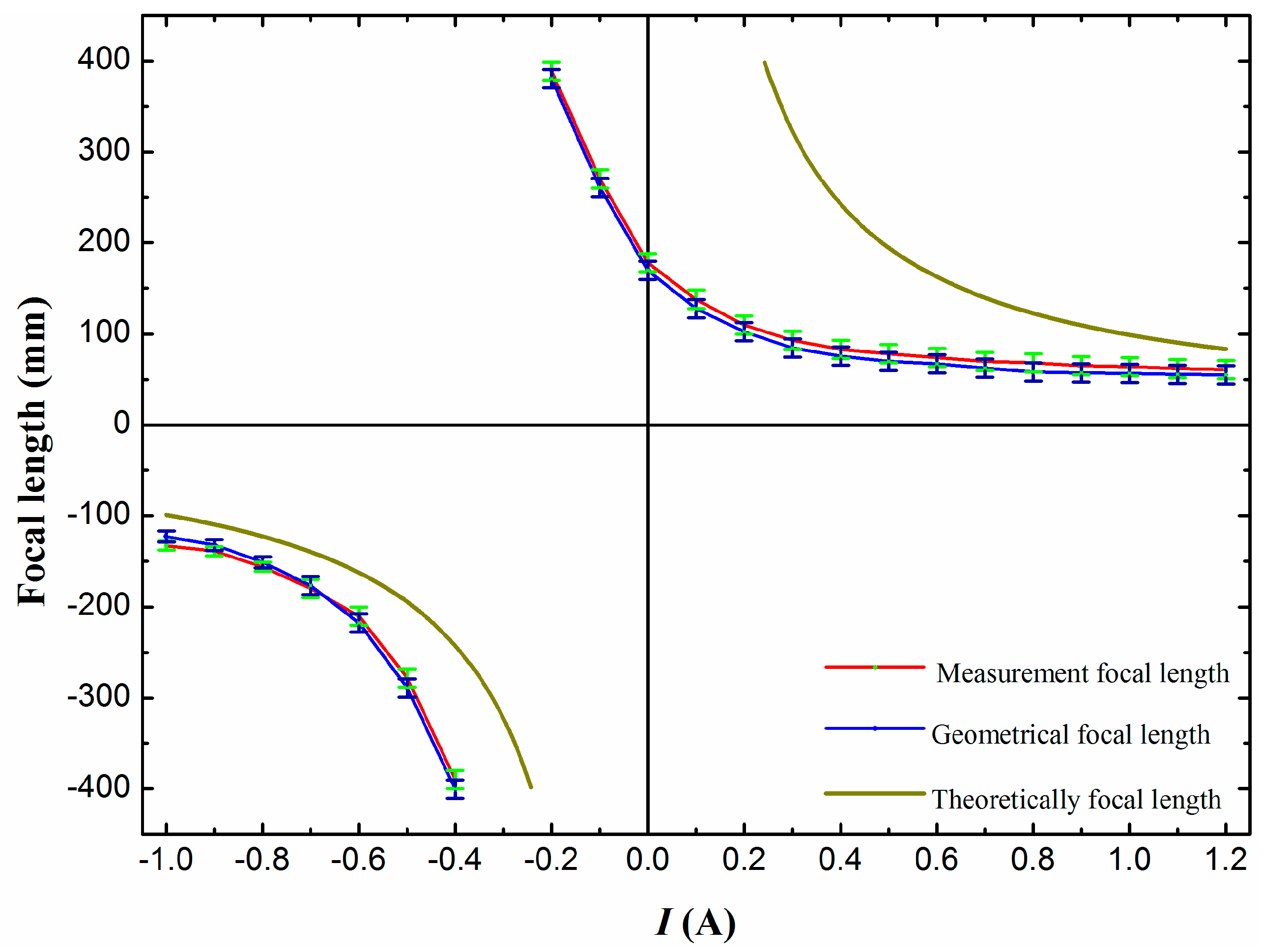
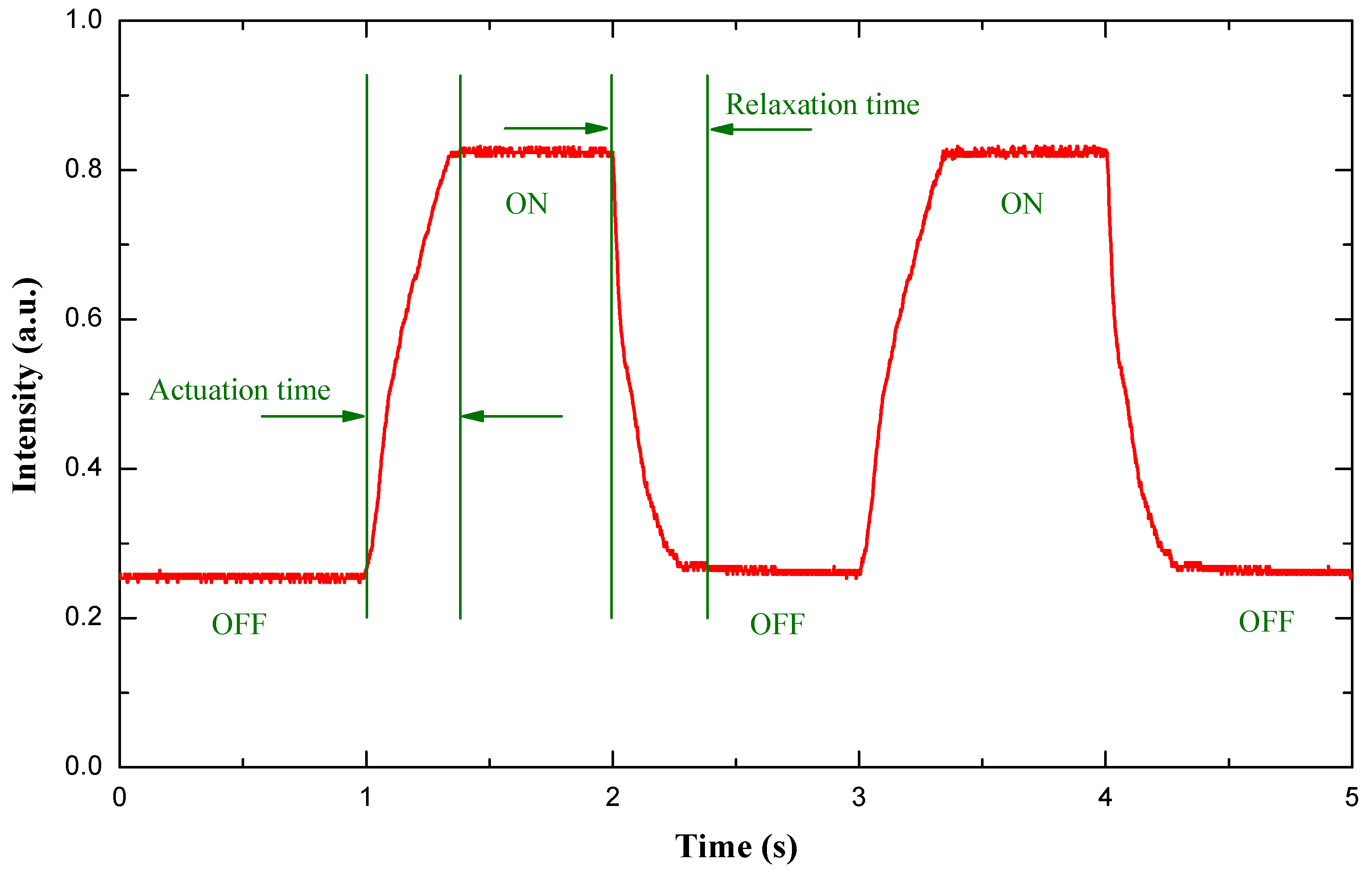
4. Experiment and Discussion
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chiu, C.P.; Chiang, T.J.; Chen, J.K.; Chang, F.C.; Ko, F.H.; Chu, C.W.; Kuo, S.W.; Fan, S.K. Liquid lenses and driving mechanisms: A Review. J. Adhes. Sci. Technol. 2012, 26, 1773–1778. [Google Scholar] [CrossRef]
- Yu, H.B.; Zhou, G.Y.; Lee, F.W.; Wang, S.H.; Leung, H.M. A liquid-filled tunable double-focus microlens. Opt. Express 2009, 17, 4782–4790. [Google Scholar] [CrossRef] [PubMed]
- Ren, H.; Fox, D.; Anderson, P.A.; Wu, B.; Wu, S.T. Tunable-focus liquid lens controlled using a servo motor. Opt. Express 2006, 14, 8031–8036. [Google Scholar] [CrossRef] [PubMed]
- Dong, L.; Agarwal, A.K.; Beebe, D.J.; Jiang, H. Adaptive liquid microlenses activated by stimuli-responsive hydrogels. Nature 2006, 442, 551–554. [Google Scholar] [CrossRef] [PubMed]
- Wei, K.; Domicone, N.W.; Zhao, Y. Electroactive liquid lens driven by an annular membrane. Opt. Lett. 2014, 39, 1318–1321. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Wang, Q.H.; Yao, L.X.; Wang, M.H. Adaptive liquid lens actuated by droplet movement. Micromachines 2014, 5, 496–504. [Google Scholar] [CrossRef]
- Li, C.; Jiang, H. Electrowetting-driven variable-focus microlens on flexible surfaces. Appl. Phys. Lett. 2012, 100, 231105. [Google Scholar] [CrossRef] [PubMed]
- Ren, H.; Xianyu, H.; Xu, S.; Wu, S.T. Adaptive dielectric liquid lens. Opt. Express 2008, 16, 14954–14960. [Google Scholar] [CrossRef] [PubMed]
- Chang, J.H.; Jung, K.D.; Lee, E.; Choi, M.; Lee, S.; Kim, W. Varifocal liquid lens based on microelectrofluidic technology. Opt. Lett. 2012, 37, 4377–4379. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Fang, J. Design, fabrication and testing of a micromachined integrated tunable microlens. J. Micromech. Microeng. 2006, 16, 1221–1226. [Google Scholar] [CrossRef]
- Lee, S.W.; Lee, S.S. Focal tunable liquid lens integrated with an electromagnetic actuator. Appl. Phys. Lett. 2007, 90, 121129. [Google Scholar] [CrossRef]
- Ren, H.; Fan, Y.H.; Wu, S.T. Liquid-crystal microlens arrays using patterned polymer networks. Opt. Lett. 2004, 29, 1608–1610. [Google Scholar] [CrossRef] [PubMed]
- Cheng, C.C.; Chang, C.A.; Yeh, J.A. Variable focus dielectric liquid droplets lens. Opt. Express 2006, 14, 4101–4106. [Google Scholar] [CrossRef] [PubMed]
- Ren, H.; Fan, Y.H.; Lin, Y.H.; Wu, S.T. Tunable-focus microlens arrays using nanosized polymerdispersed liquid crystal droplets. Opt. Commun. 2005, 247, 101–106. [Google Scholar] [CrossRef]
- Li, C.; Jiang, H. Fabrication and characterization of flexible electrowetting on dielectrics (EWOD) microlens. Micromachines 2014, 5, 432–441. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Tian, H.; Shao, J.; Ding, Y.; Chen, X.; Wang, L.; Lu, B. Decreasing the saturated contact angle in electrowetting-on-dielectrics by controlling the charge trapping at liquid–solid interfaces. Adv. Funct. Mater. 2016, 2994–3002. [Google Scholar] [CrossRef]
- Li, L.; Liu, C.; Ren, H.; Deng, H.; Wang, Q.H. Annular folded electrowetting liquid lens. Opt. Lett. 2015, 40, 1968–1971. [Google Scholar] [CrossRef] [PubMed]
- Xu, M.; Xu, D.; Ren, H.; Yoo, I.S.; Wang, Q.H. An adaptive liquid lens with radial interdigitated electrode. J. Opt. 2014, 16, 105601. [Google Scholar] [CrossRef]
- Jin, B.; Xu, M.; Ren, H.; Wang, Q.H. An adaptive liquid lens with a reciprocating movement in a cylindrical hole. Opt. Express 2014, 22, 31041–31049. [Google Scholar] [CrossRef] [PubMed]
- Xu, M.; Wang, X.; Ren, H. Tunable focus liquid lens withradial-patterned electrode. Micromachines 2015, 6, 1157–1165. [Google Scholar] [CrossRef]
- Yu, H.; Zhou, G.; Chau, F.S.; Sinha, S.K. Tunable electromagnetically actuated liquid-filled lens. Sens. Actuators A Phys. 2011, 167, 602–607. [Google Scholar] [CrossRef]
- Thielicke, E.; Obermeier, E. Microactuators and their technologies. Mechatronics 2000, 10, 431–455. [Google Scholar] [CrossRef]
- Lee, C.Y.; Chen, Z.H.; Chang, H.T.; Wen, C.Y.; Cheng, C.H. Design and fabrication of novel micro electromagnetic actuator. Microsyst. Technol. 2009, 15, 1171–1177. [Google Scholar] [CrossRef]
- Hartley, A.C.; Miles, R.E.; Corda, J.; Dimitrakopoulos, N. Large throw magnetic microactuator. Mechatronics 2008, 18, 459–465. [Google Scholar] [CrossRef]
- Chang, H.T.; Lee, C.Y.; Wen, C.Y. Design and modeling of electromagnetic actuator in MEMS-based valveless impedance pump. Microsyst. Technol. 2007, 13, 1615–1622. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Data |
|---|---|
| Length | 28 mm |
| Width | 18 mm |
| Thickness apart from the magnet | 2.4 mm |
| Radius of driven chamber Rd | 6 mm |
| Radius of optical chamber Ro | 5 mm |
| Parameters | Data |
|---|---|
| Turns | 15 |
| Width | 280 μm |
| Thickness | 35 μm |
| Inner radius R | 1000 μm |
| Spacing | 140 μm |
| Resistance | 5.5 Ω |
© 2016 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Duan, J.; Zhang, B.; Wang, W. Variable-Focus Liquid Lens Integrated with a Planar Electromagnetic Actuator. Micromachines 2016, 7, 190. https://doi.org/10.3390/mi7100190
Wang L, Duan J, Zhang B, Wang W. Variable-Focus Liquid Lens Integrated with a Planar Electromagnetic Actuator. Micromachines. 2016; 7(10):190. https://doi.org/10.3390/mi7100190
Chicago/Turabian StyleWang, Liang, Junping Duan, Binzhen Zhang, and Wanjun Wang. 2016. "Variable-Focus Liquid Lens Integrated with a Planar Electromagnetic Actuator" Micromachines 7, no. 10: 190. https://doi.org/10.3390/mi7100190