
PDR/INS/WiFi Integration Based on Handheld Devices for Indoor Pedestrian Navigation

Abstract
:
1. Introduction
2. Related Works
2.2. Integrated Technologies for WiFi and MEMS Sensors
3. Methodology
3.2. Extended Kalman Filter
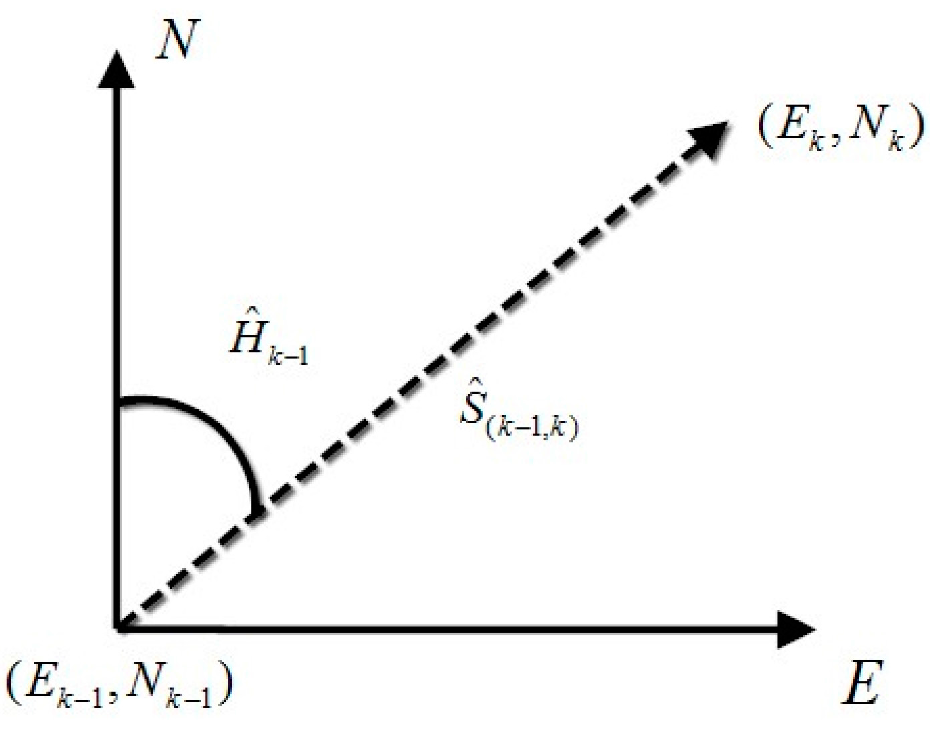
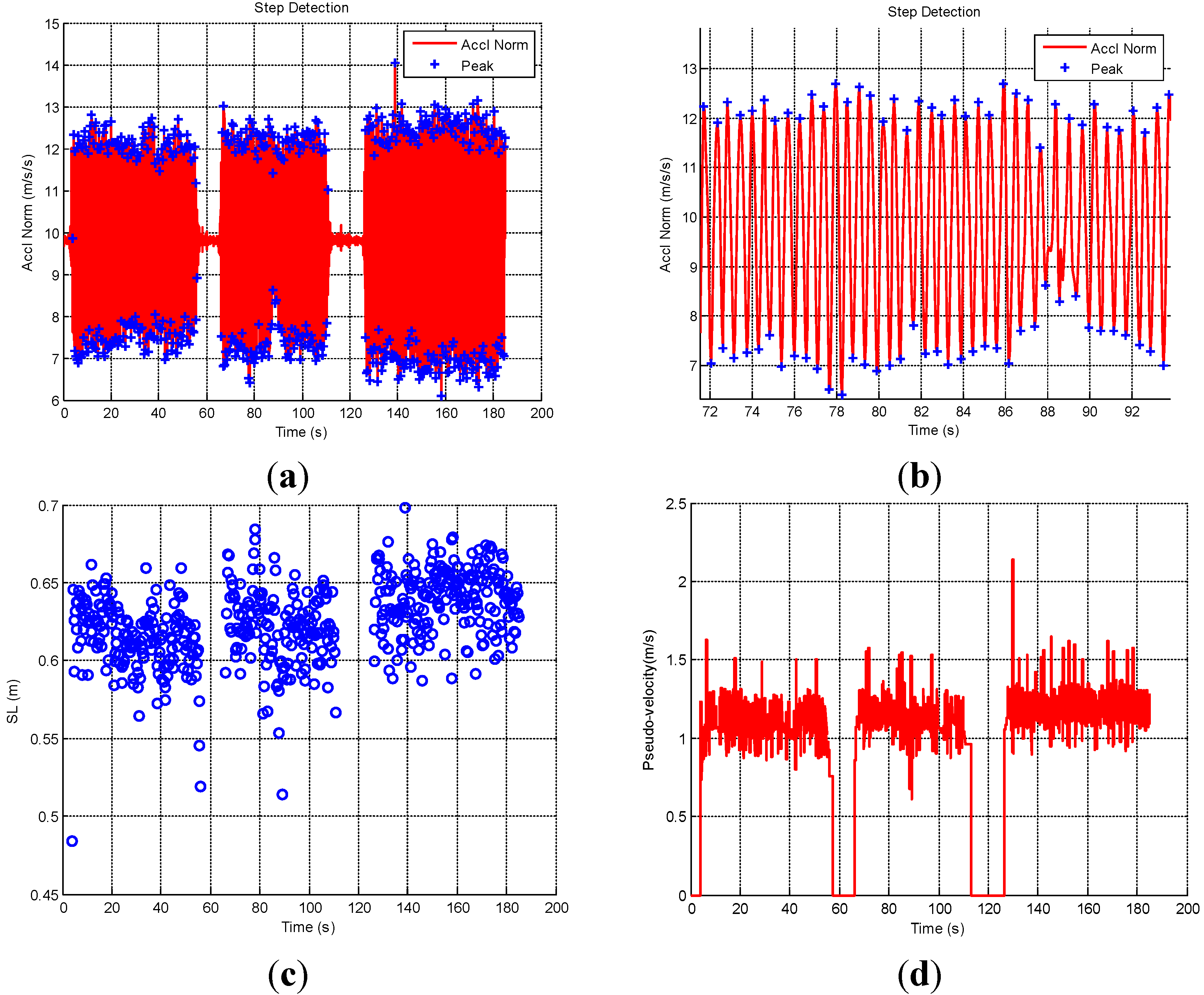
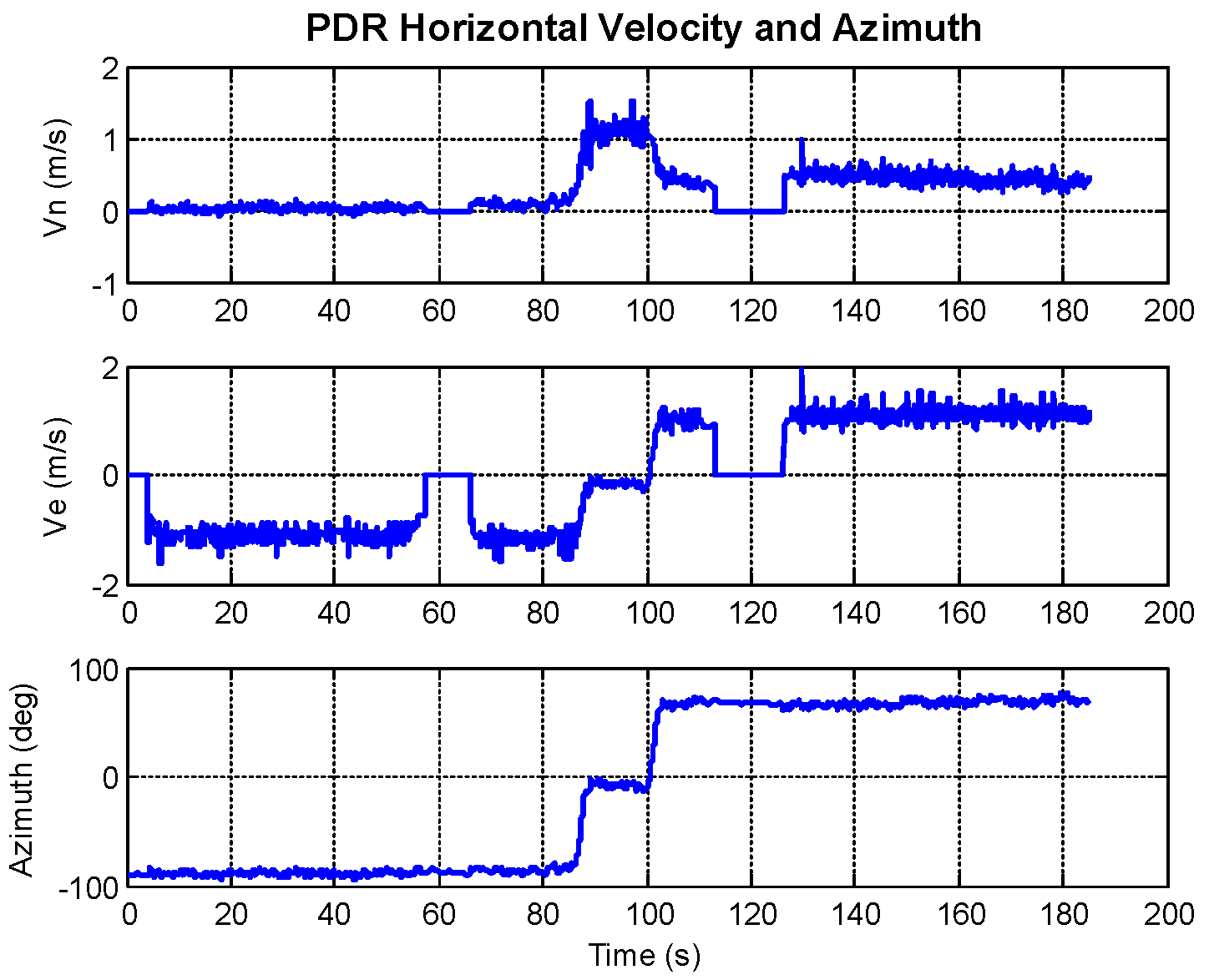
3.3. PDR Algorithm
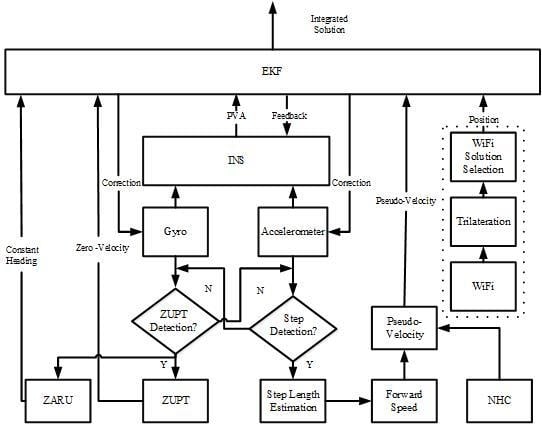
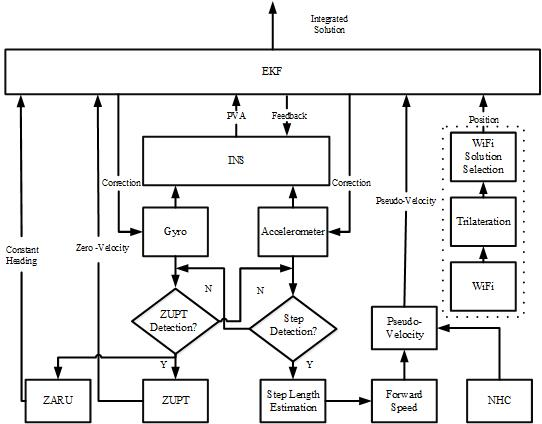
3.4. Proposed Scheme

4. Results
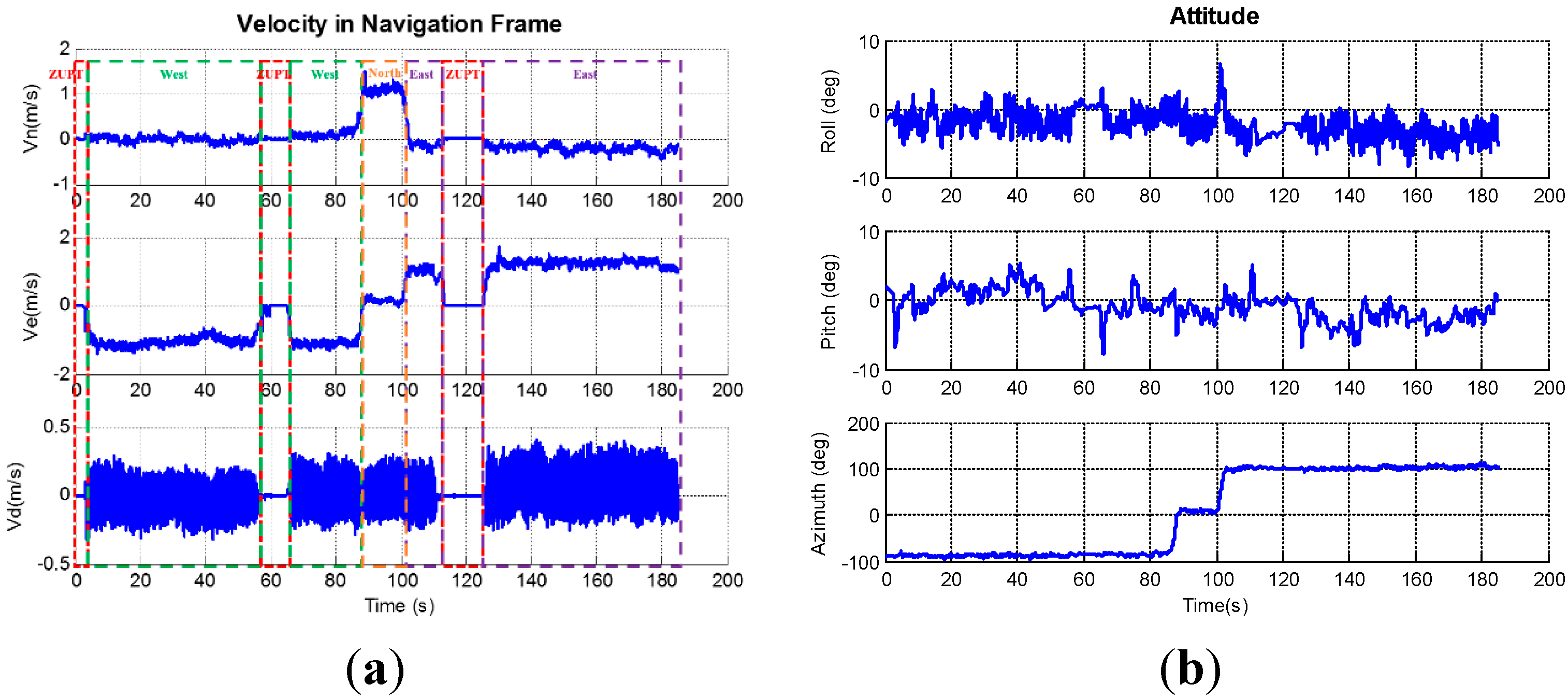
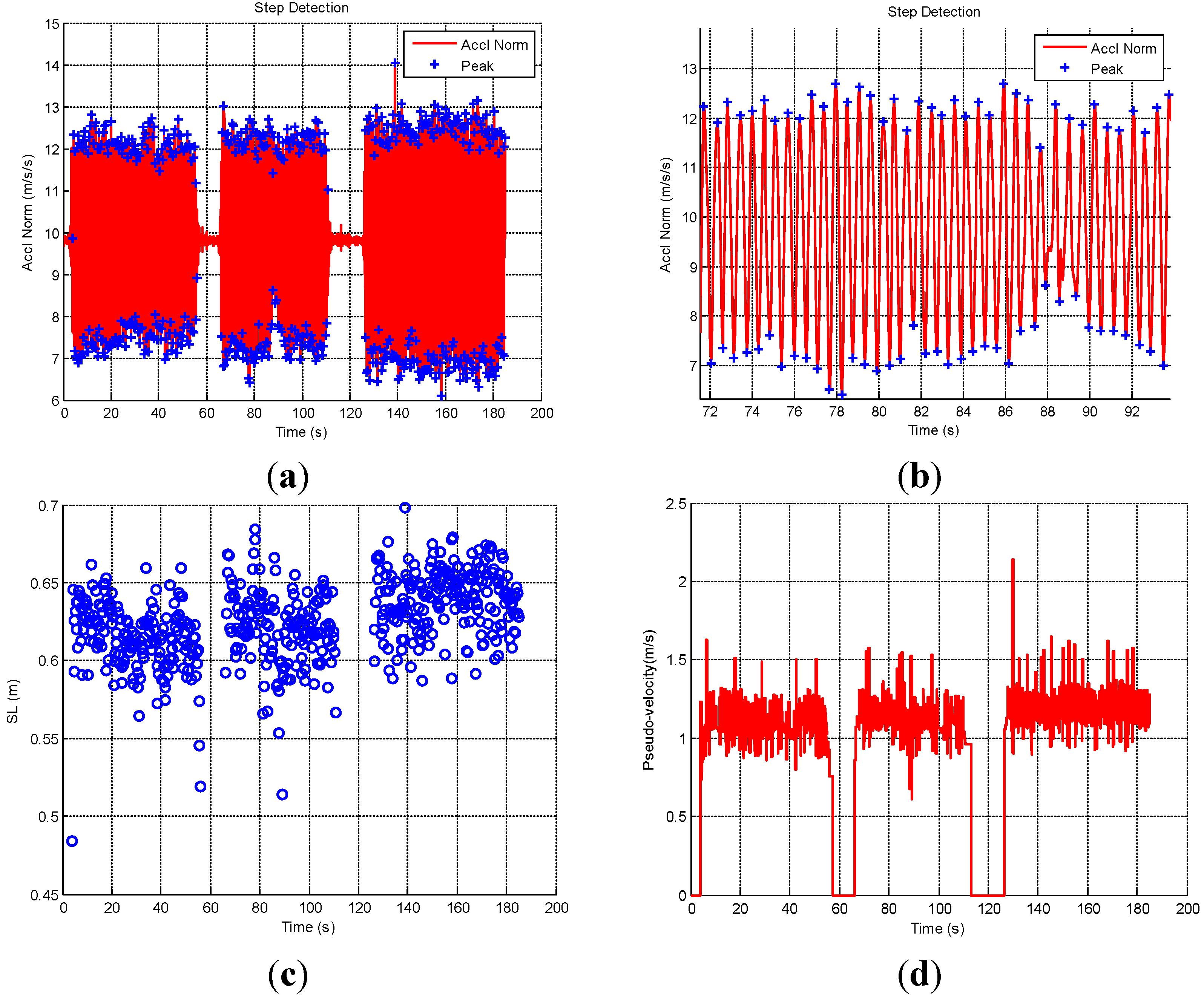
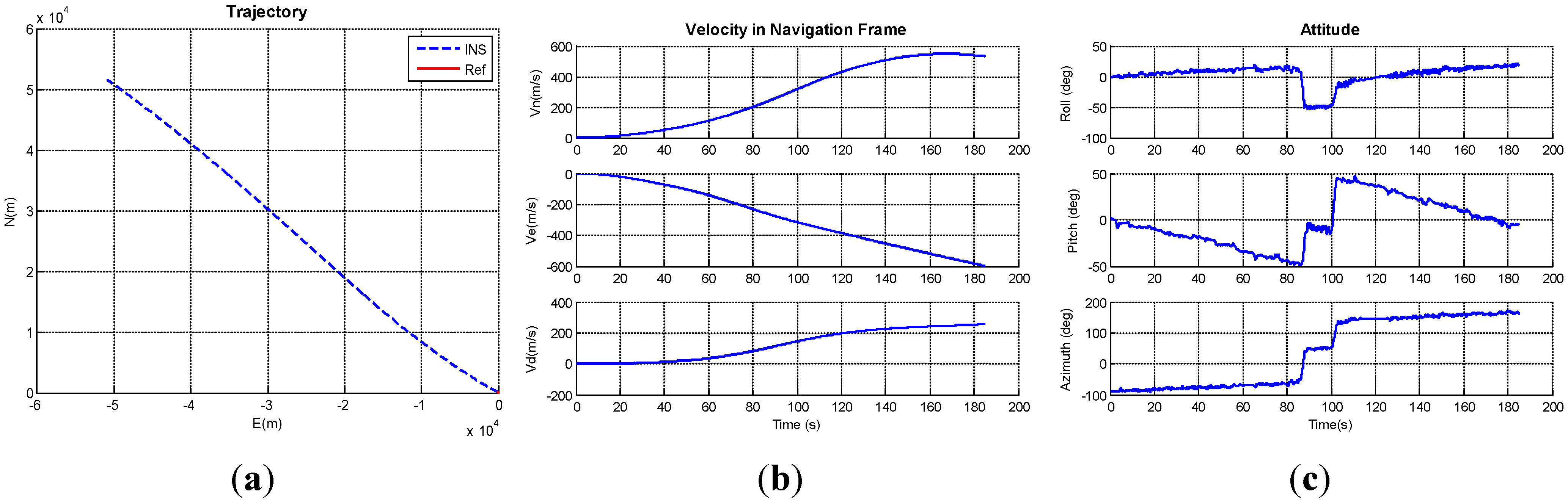
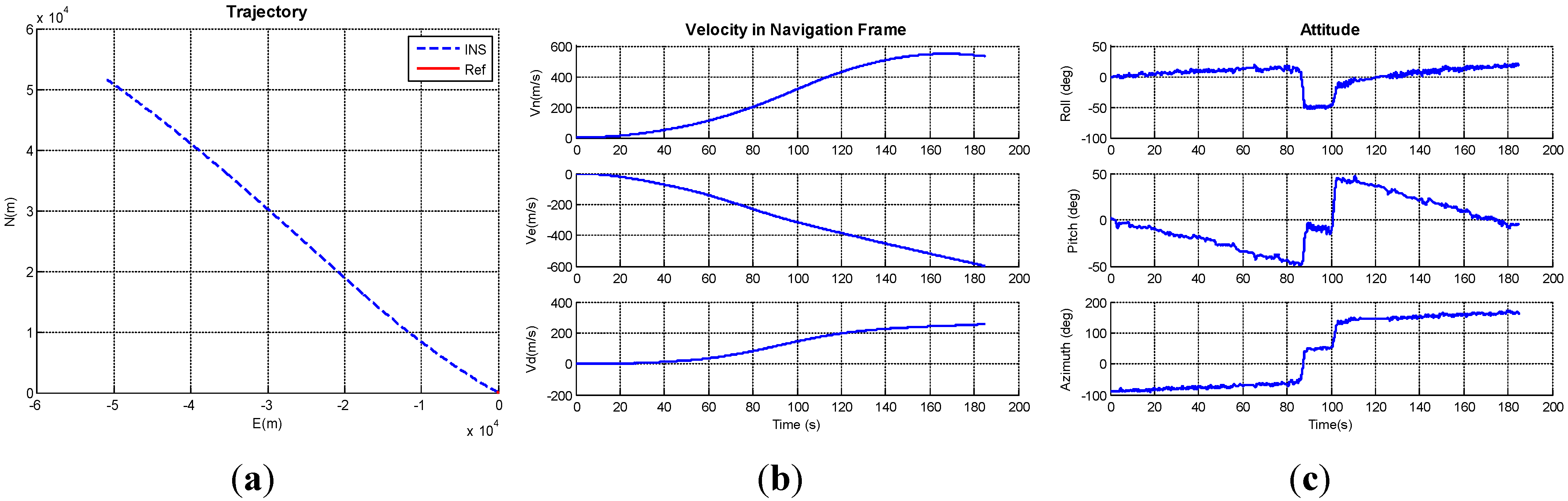
4.1. PDR/INS Integrated MEMS Pedestrian Navigation Algorithm
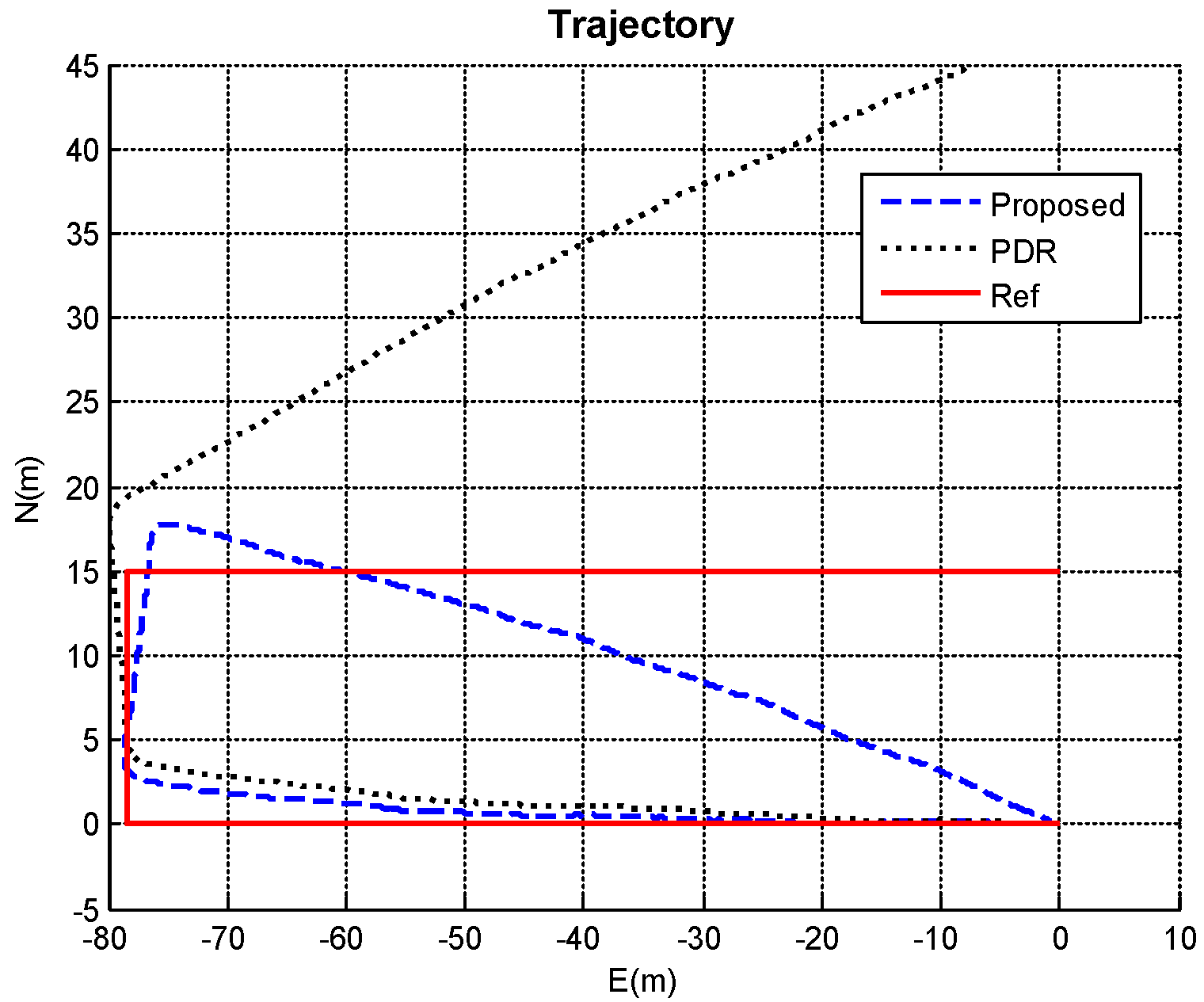

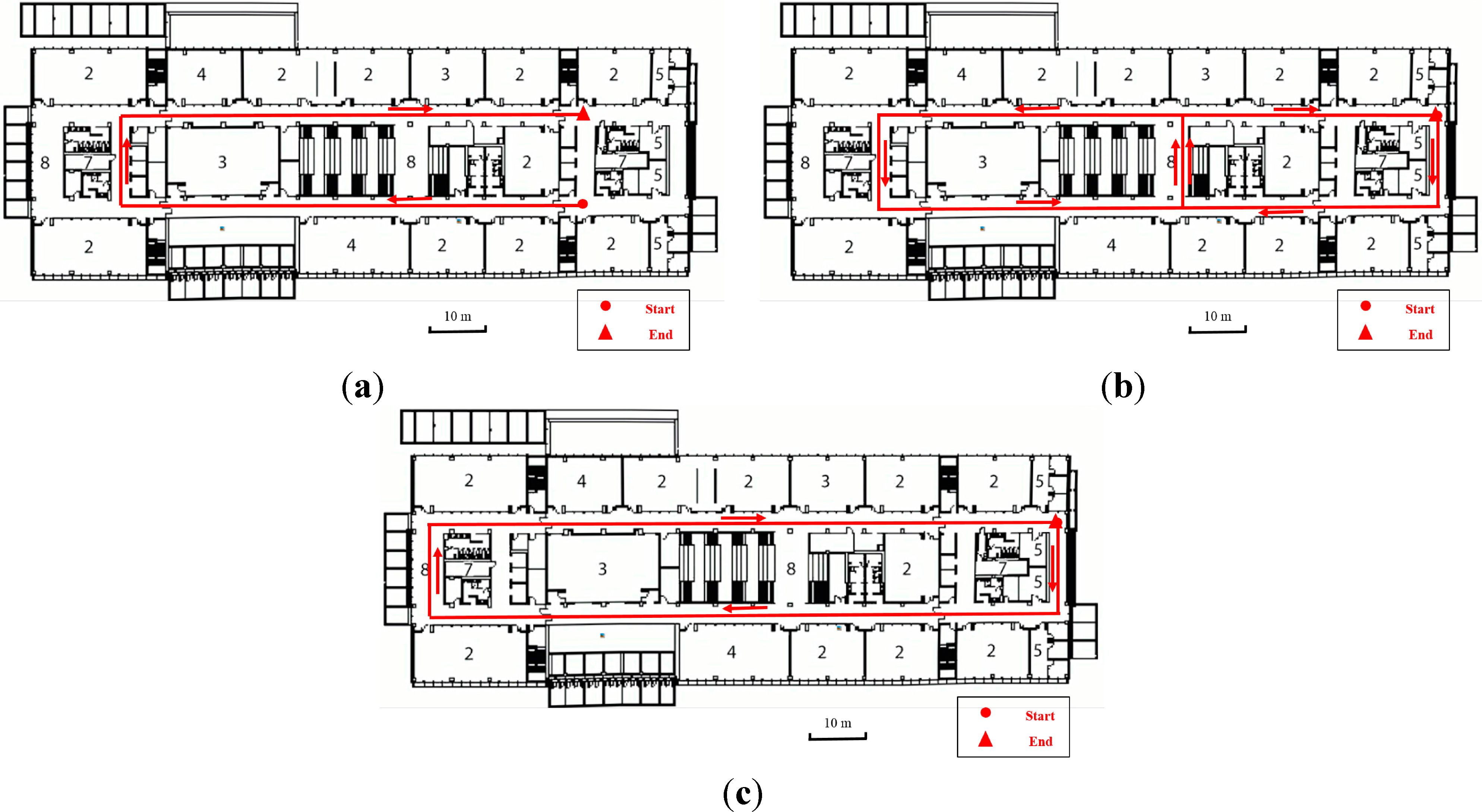
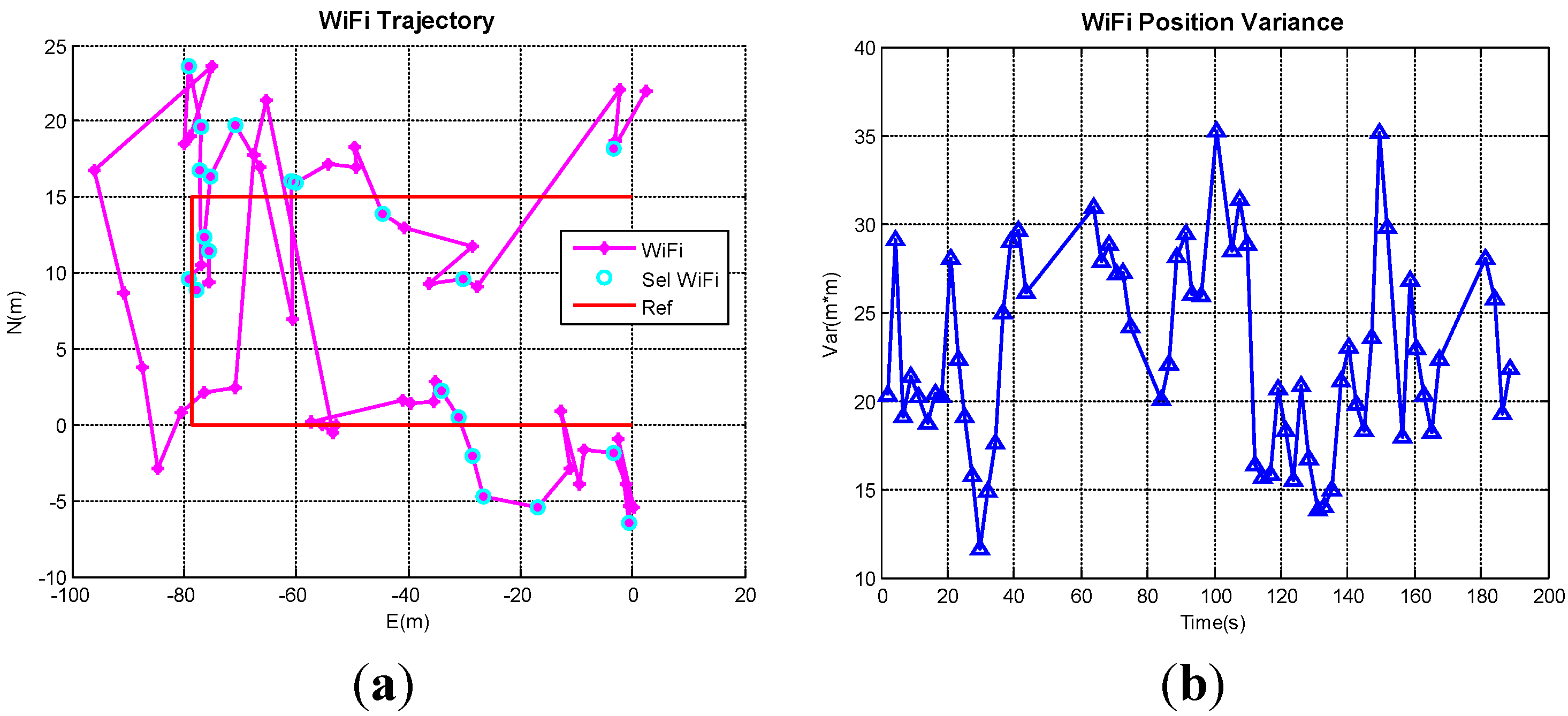
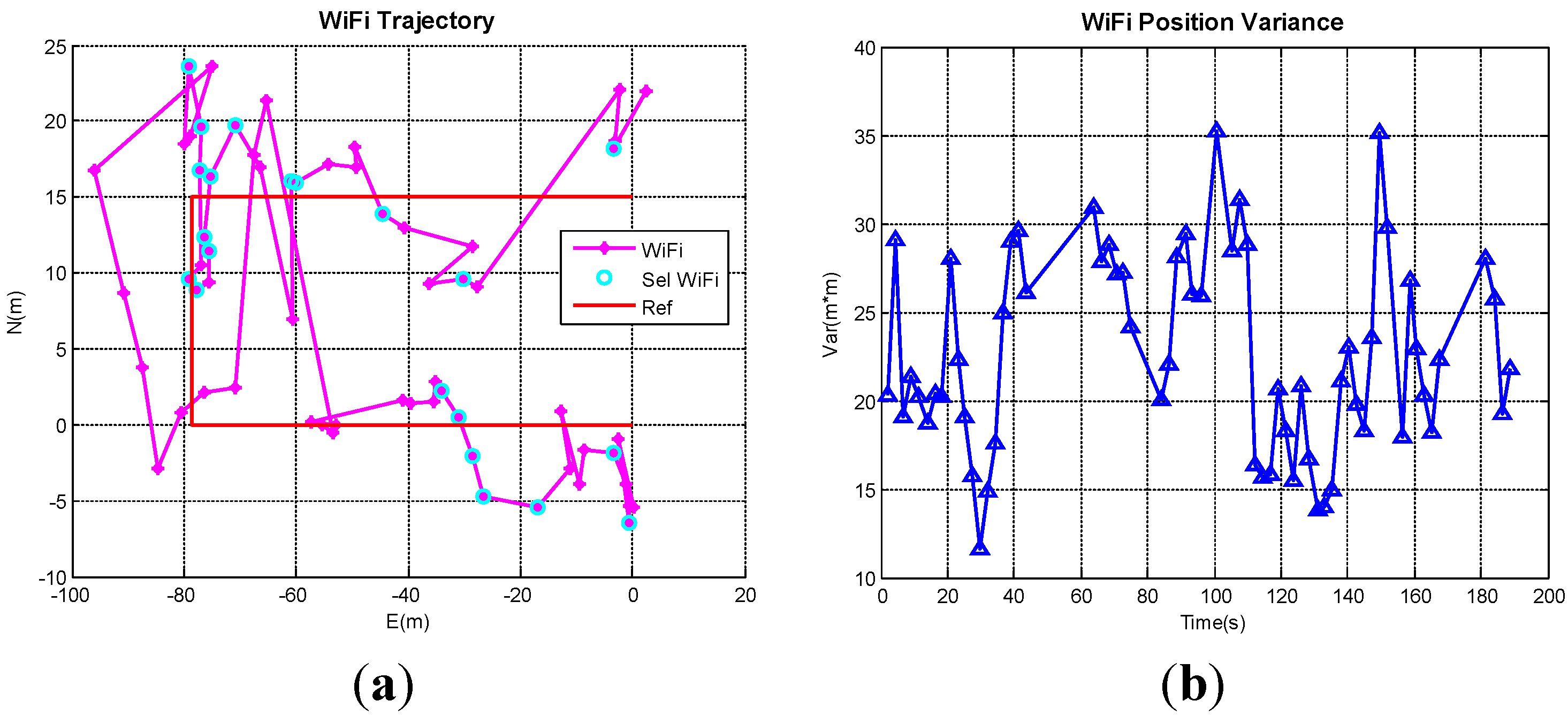
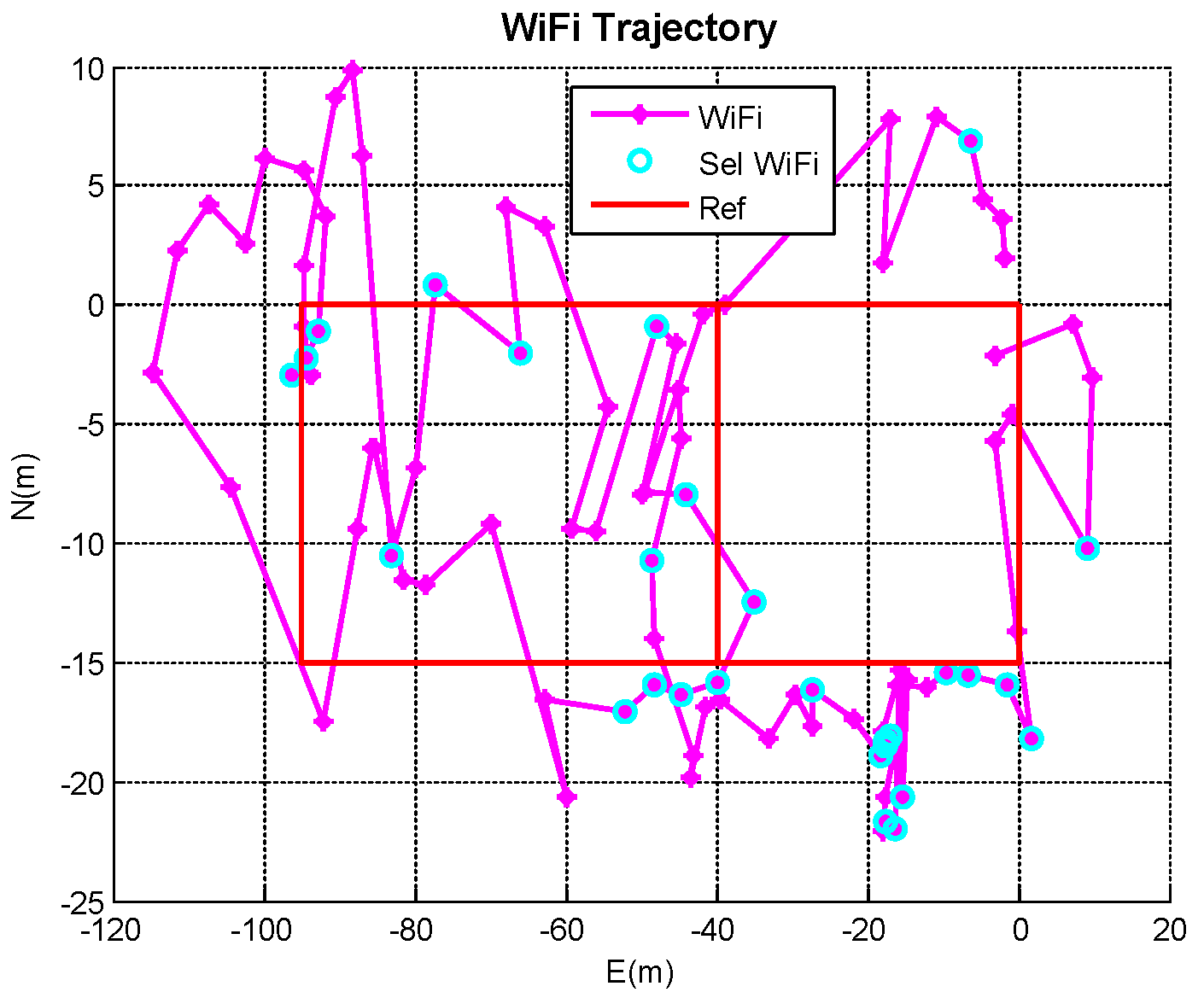
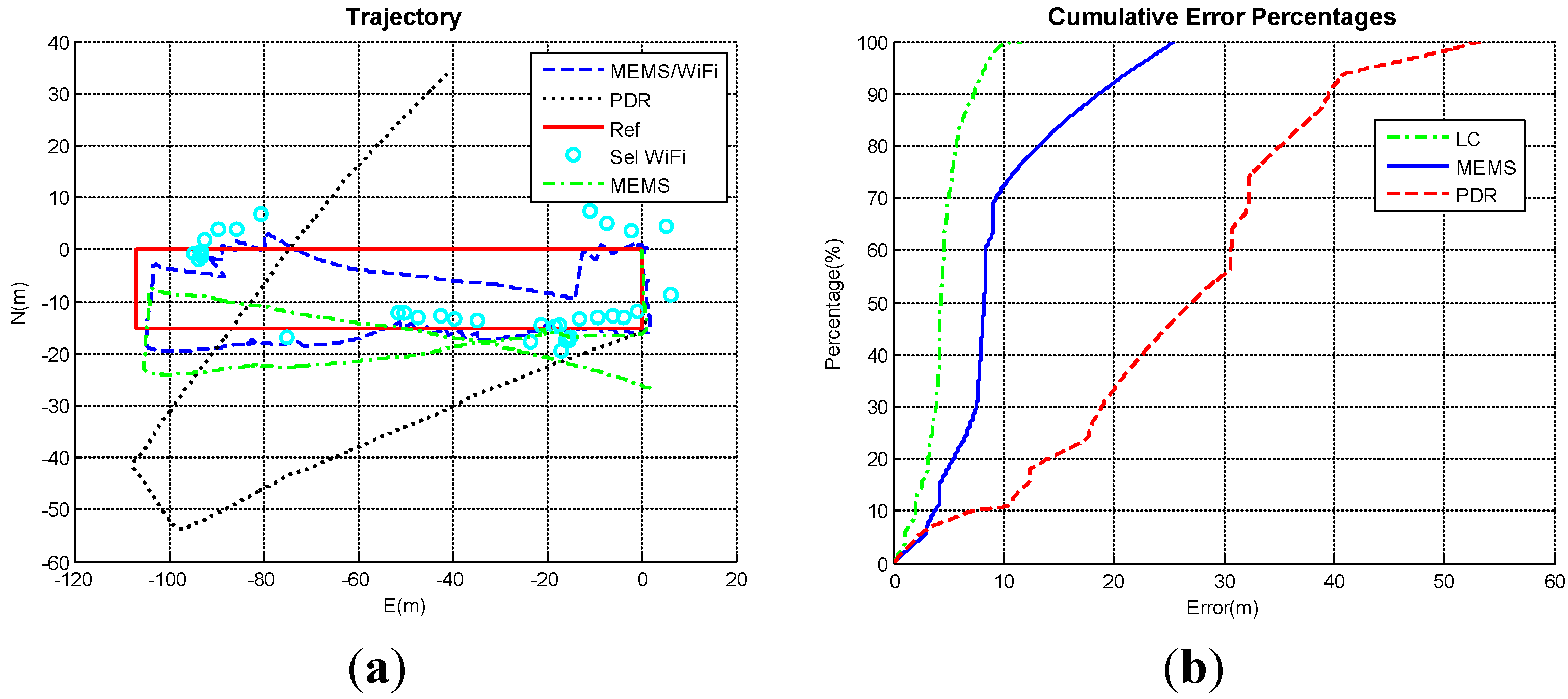
4.2. Proposed PDR/INS/WiFi Integrated Indoor Pedestrian Navigation Solution


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
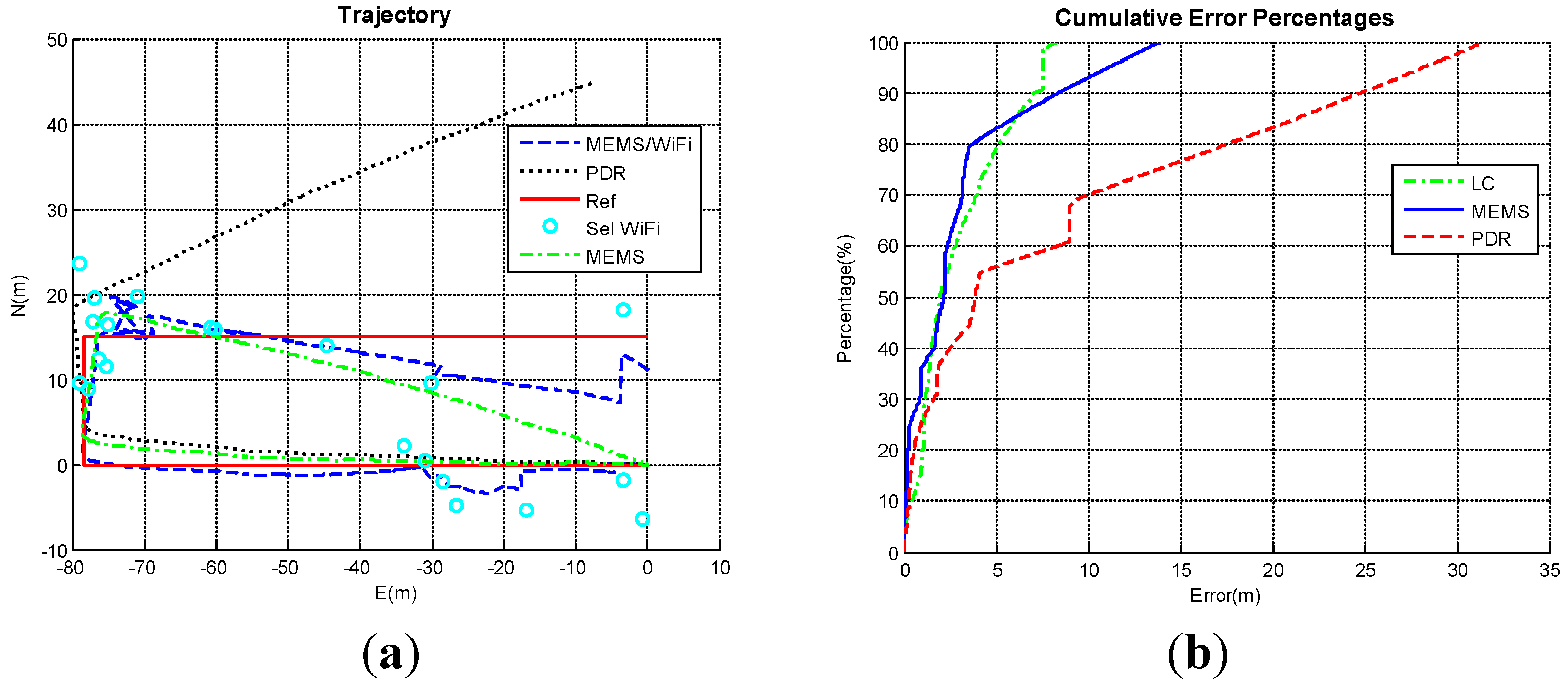
| Algorithm | Error (m) | |||
|---|---|---|---|---|
| Maximum | Minimum | Mean | RMS | |
| PDR | 31.48 | 0.13 | 8.44 | 12.57 |
| MEMS (PDR/INS) | 13.93 | 0.25 | 2.91 | 4.40 |
| MEMS/WiFi Integration | 8.22 | 0.21 | 2.91 | 3.73 |

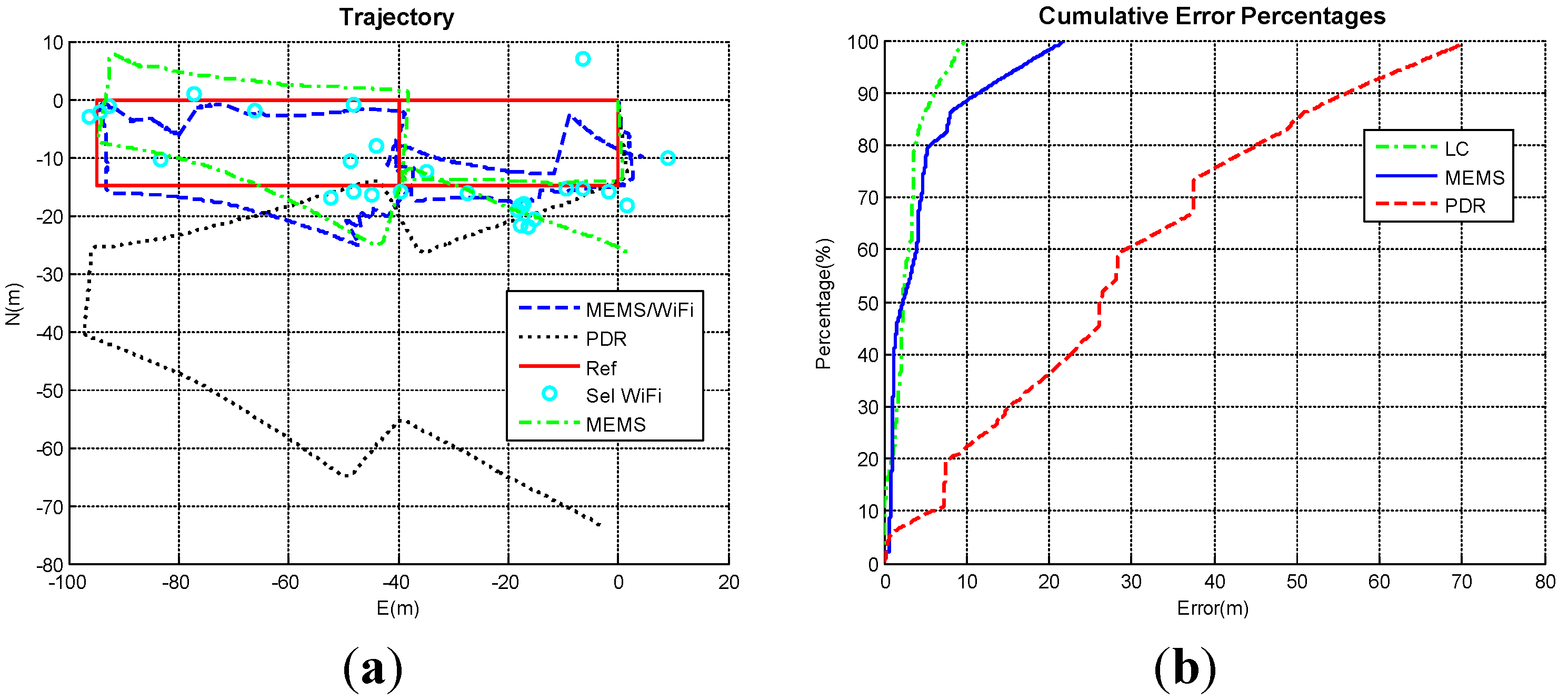
| Algorithm | Error (m) | |||
|---|---|---|---|---|
| Maximum | Minimum | Mean | RMS | |
| PDR | 75.03 | 0.14 | 27.92 | 34.00 |
| MEMS (PDR/INS) | 27.59 | 0.52 | 5.72 | 8.28 |
| MEMS/WiFi Integration | 12.21 | 0.48 | 4.17 | 4.87 |

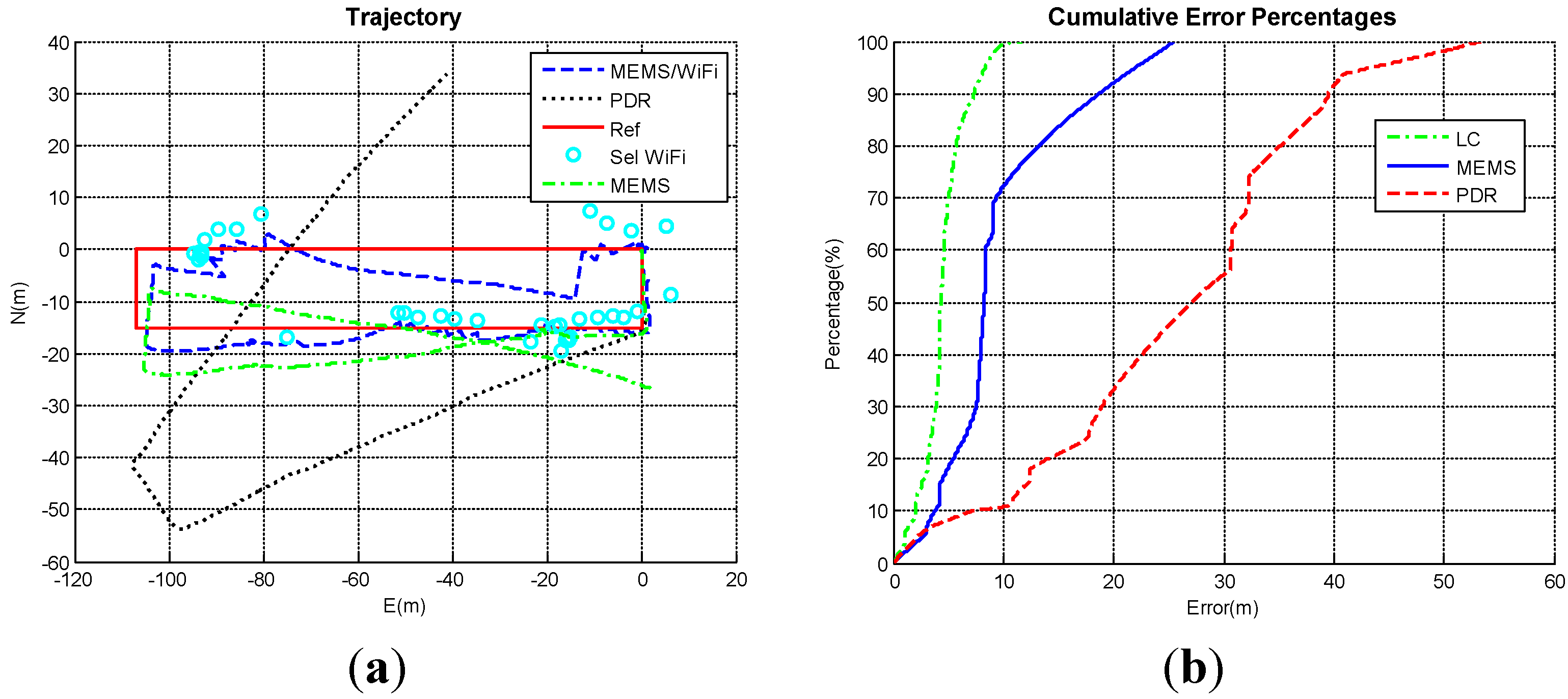
| Algorithm | Error (m) | |||
|---|---|---|---|---|
| Maximum | Minimum | Mean | RMS | |
| PDR | 53.49 | 0.05 | 25.35 | 28.08 |
| MEMS (PDR/INS) | 25.51 | 0.01 | 9.55 | 11.02 |
| MEMS/WiFi Integration | 11.66 | 0.01 | 4.49 | 4.90 |
| Algorithm | Mean Error (m) | RMS Error (m) | ||||
|---|---|---|---|---|---|---|
| Trajectory I | Trajectory II | Trajectory III | Trajectory I | Trajectory II | Trajectory III | |
| PDR | 8.44 | 27.92 | 25.35 | 12.57 | 34.00 | 28.08 |
| MEMS (PDR/INS) | 2.91 | 5.72 | 9.55 | 4.40 | 8.28 | 11.02 |
| MEMS/WiFi Integration | 2.91 | 4.17 | 4.49 | 3.73 | 4.87 | 4.90 |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kaplan, E.D.; Hegarty, C.J. Understanding GPS: Principles and Applications; Artech House Publishers: Norwood, MA, USA, 2006. [Google Scholar]
- He, Z.; Renaudin, V.; Petovello, M.G.; Lachapelle, G. Use of high sensitivity GNSS receiver doppler measurements for indoor pedestrian dead reckoning. Sensors 2013, 13, 4303–4326. [Google Scholar] [CrossRef] [PubMed]
- Nassar, S.; El-Sheimy, N. A combined algorithm of improving INS error modeling and sensor measurements for accurate INS/GPS navigation. GPS Solut. 2006, 10, 29–39. [Google Scholar] [CrossRef]
- Sadi, F.; Klukas, R. New jump trajectory determination method using low-cost mems sensor fusion and augmented observations for GPS/INS integration. GPS Solut. 2013, 17, 139–152. [Google Scholar] [CrossRef]
- Niu, X.; Li, Y.; Zhang, H.; Cheng, Y.; Shi, C. Observability analysis of non-holonomic constraints for land-vehicle navigation systems. J. Glob. Position. Syst. 2012, 11, 80–88. [Google Scholar] [CrossRef]
- Li, Y.; Georgy, J.; Niu, X.; Li, Q.; El-Sheimy, N. Autonomous calibration of MEMS gyros in consumer portable devices. IEEE Sens. J. 2015, 15, 4062–4072. [Google Scholar] [CrossRef]
- Zhuang, Y.; Syed, Z.; Georgy, J.; El-Sheimy, N. Autonomous smartphone-based WiFi positioning system by using access points localization and crowdsourcing. Pervasive Mob. Comput. 2015, 18, 118–136. [Google Scholar] [CrossRef]
- Zhuang, Y.; Wright, B.; Syed, Z.; Shen, Z.; El-Sheimy, N. Fast WiFi access point localization and autonomous crowdsourcing. In Proceedings of the Ubiquitous Positioning Indoor Navigation and Location Based Service (UPINLBS), Corpus Christ, TX, USA, 20–21 November 2014; pp. 272–280.
- Zhao, X.; Xiao, Z.; Markham, A.; Trigoni, N.; Ren, Y. Does BTLE measure up against WiFi? A comparison of indoor location performance. In Proceedings of the 20th European Wireless Conference, Barcelona, Spain, 14–16 May 2014; pp. 1–6.
- Ozdenizci, B.; Coskun, V.; Ok, K. NFC internal: An indoor navigation system. Sensors 2015, 15, 7571–7595. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cassimon, D.; Engelen, P.-J.; Yordanov, V. Compound real option valuation with phase-specific volatility: A multi-phase mobile payments case study. Technovation 2011, 31, 240–255. [Google Scholar] [CrossRef] [Green Version]
- Ruiz, A.J.; Granja, F.S.; Prieto Honorato, J.C.; Rosas, J.I. Accurate pedestrian indoor navigation by tightly coupling foot-mounted IMU and RFID measurements. Instrum. Meas. IEEE Trans. 2012, 61, 178–189. [Google Scholar] [CrossRef]
- Yuan, X.; Yu, S.; Zhang, S.; Wang, G.; Liu, S. Quaternion-based unscented Kalman filter for accurate indoor heading estimation using wearable multi-sensor system. Sensors 2015, 15, 10872–10890. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Zhang, S.; Yu, S.; Yuan, X.; Liu, S. Design and analysis of gyro-free inertial measurement units with different configurations. Sens. Actuators A Phys. 2014, 214, 175–186. [Google Scholar] [CrossRef]
- Lee, Y.-C.; Yu, W.; Cho, J.-I. Adaptive localization for mobile robots in urban environments using low-cost sensors and enhanced topological map. In Proceedings of the 15th International Conference on Advanced Robotics (ICAR), Tallinn, Estonia, 20–23 June 2011; pp. 569–575.
- Zhuang, Y.; Chang, H.W.; El-Sheimy, N. A MEMS multi-sensors system for pedestrian navigation. In Proceedings of the China Satellite Navigation Conference (CSNC), Wuhan, China, 4 May 2013; pp. 651–660.
- Titterton, D.H.; Weston, J.L. Strapdown Inertial Navigation Technology, 2nd ed.; Institution of Engineering and Technology: Stevenage, UK, 2004. [Google Scholar]
- Li, Y.; Niu, X.; Zhang, Q.; Zhang, H.; Shi, C. An in situ hand calibration method using a pseudo-observation scheme for low-end inertial measurement units. Meas. Sci. Technol. 2012, 23, 105104. [Google Scholar] [CrossRef]
- Chiang, K.-W.; Chang, H.-W. Intelligent sensor positioning and orientation through constructive neural network-embedded INS/GPS integration algorithms. Sensors 2010, 10, 9252–9285. [Google Scholar] [CrossRef] [PubMed]
- Atia, M.; Noureldin, A.; Georgy, J.; Korenberg, M. Bayesian filtering based WiFi/INS integrated navigation solution for GPS-denied environments. Navigation 2011, 58, 111–125. [Google Scholar] [CrossRef]
- Lan, H.; El-sheimy, N. A state constraint Kalman filter for pedestrian navigation with low cost MEMS inertial sensors. In Proceedings of the 27th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 579–589.
- Gezici, S. A survey on wireless position estimation. Wirel. Pers. Commun. 2008, 44, 263–282. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N. Radar: An in-building RF-based user location and tracking system. In Proceedings of the 19th Annual Joint Conference of the IEEE Computer and Communications Societies (INFOCOM 2000), Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784.
- Zhao, X.; Goodall, C.; Syed, Z.; Wright, B.; El-Sheimy, N. Wi-Fi assisted multi-sensor personal navigation system for indoor environments. In Proceedings of the 2010 International Technical Meeting of the Institute of Navigation, San Diego, CA, USA, 25–27 January 2010; pp. 236–243.
- Waegli, A.; Skaloud, J. Optimization of two GPS/MEMS-IMU integration strategies with application to sports. GPS Solut. 2009, 13, 315–326. [Google Scholar] [CrossRef]
- Nassar, S.; Shin, E.-H.; Niu, X.; El-Sheimy, N. Accurate INS/GPS positioning with different inertial systems using various algorithms for bridging GPS outages. In Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005; pp. 1401–1410.
- Kim, J.W.; Jang, H.J.; Hwang, D.-H.; Park, C. A step, stride and heading determination for the pedestrian navigation system. J. Glob. Position. Syst. 2004, 3, 273–279. [Google Scholar] [CrossRef]
- Ladetto, Q.; Gabaglio, V.; Merminod, B. Combining gyroscopes, magnetic compass and GPS for pedestrian navigation. In Proceedings of the International Symposium on Kinematic Systems in Geodesy, Geomatics, and Navigation, Banff, Canada, 30 August–2 September 1994; pp. 205–213.
- Chen, L.-H.; Wu, E.H.K.; Jin, M.-H.; Chen, G.-H. Intelligent fusion of Wi-Fi and inertial sensor-based positioning systems for indoor pedestrian navigation. IEEE Sens. J. 2014, 14, 4034–4042. [Google Scholar] [CrossRef]
- Frank, K.; Krach, B.; Catterall, N.; Robertson, P. Development and evaluation of a combined WLAN & inertial indoor pedestrian positioning system. In Proceedings of the 22nd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2009), Savannah, GA, USA, 22–25 September 2009; pp. 538–546.
- Evennou, F.; Marx, F. Advanced integration of WiFi and inertial navigation systems for indoor mobile positioning. Eurasip J. Appl. Signal Process. 2006, 2006, 164. [Google Scholar] [CrossRef]
- Chai, W.; Chen, C.; Edwan, E.; Zhang, J.; Loffeld, O. 2D/3D indoor navigation based on multi-sensor assisted pedestrian navigation in Wi-Fi environments. In Proceedings of the Ubiquitous Positioning, Indoor Navigation, and Location Based Service (UPINLBS), Helsinki, Finland, 3–4 October 2012; pp. 1–7.
- El-Sheimy, N. Inertial Techniques and INS/DGPS Integration; Department of Geomatics Engineering, University of Calgary: Calgary, Canada, 2006. [Google Scholar]
- Shin, E.-H. Estimation Techniques for Low-Cost Inertial Navigation. Ph.D. Thesis, University of Calgary, Calgary, Canada, 2005. [Google Scholar]
- Gelb, A. Applied Optimal Estimation; MIT Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Weinberg, H. Using the ADXL202 in pedometer and personal navigation applications. In Analog Devices AN-602 Application Note; Analog Devices: Norwood, MA, USA, 2002. [Google Scholar]
- Syed, Z.; Aggarwal, P.; Yang, Y.; El-Sheimy, N. Improved vehicle navigation using aiding with tightly coupled integration. In Proceedings of the Vehicular Technology Conference, 2008 (VTC 2008), Singapore, 11–14 May 2008; pp. 3077–3081.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhuang, Y.; Lan, H.; Li, Y.; El-Sheimy, N. PDR/INS/WiFi Integration Based on Handheld Devices for Indoor Pedestrian Navigation. Micromachines 2015, 6, 793-812. https://doi.org/10.3390/mi6060793
Zhuang Y, Lan H, Li Y, El-Sheimy N. PDR/INS/WiFi Integration Based on Handheld Devices for Indoor Pedestrian Navigation. Micromachines. 2015; 6(6):793-812. https://doi.org/10.3390/mi6060793
Chicago/Turabian StyleZhuang, Yuan, Haiyu Lan, You Li, and Naser El-Sheimy. 2015. "PDR/INS/WiFi Integration Based on Handheld Devices for Indoor Pedestrian Navigation" Micromachines 6, no. 6: 793-812. https://doi.org/10.3390/mi6060793