Structural Design and Experimental Analysis of a Piezoelectric Vibration Feeder with a Magnetic Spring


Abstract
:1. Introduction
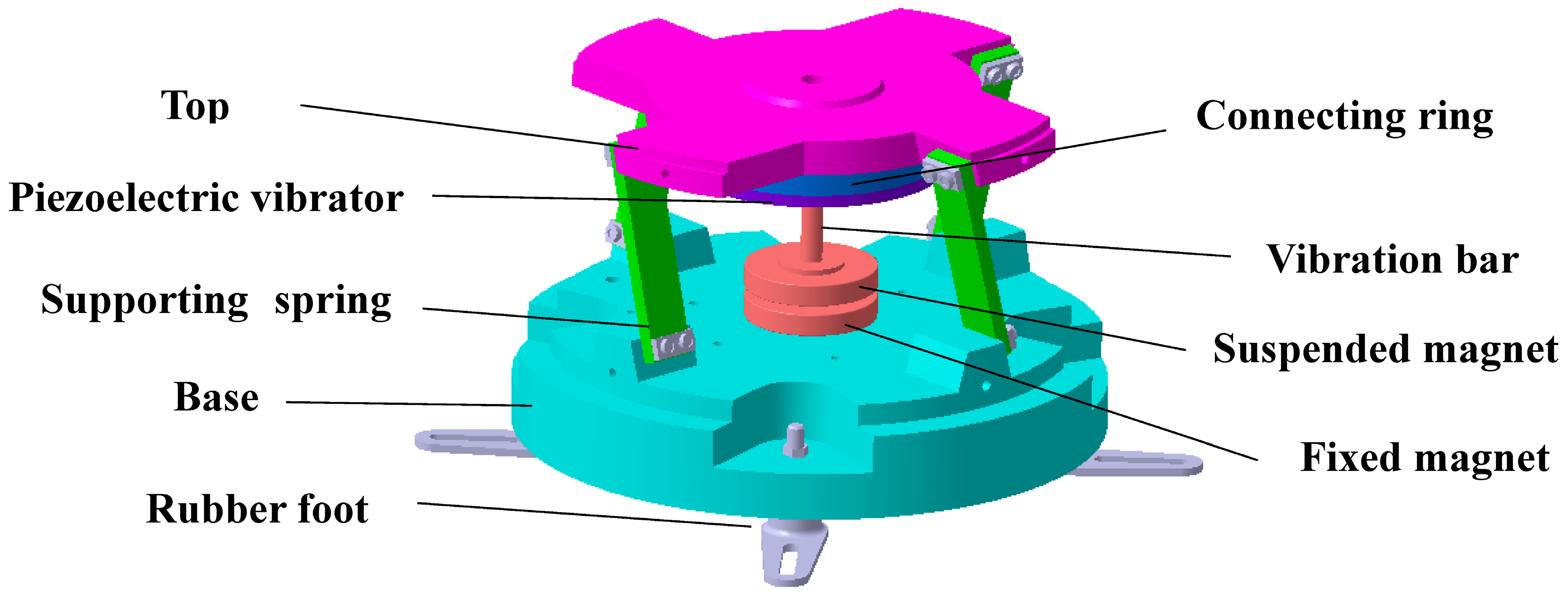
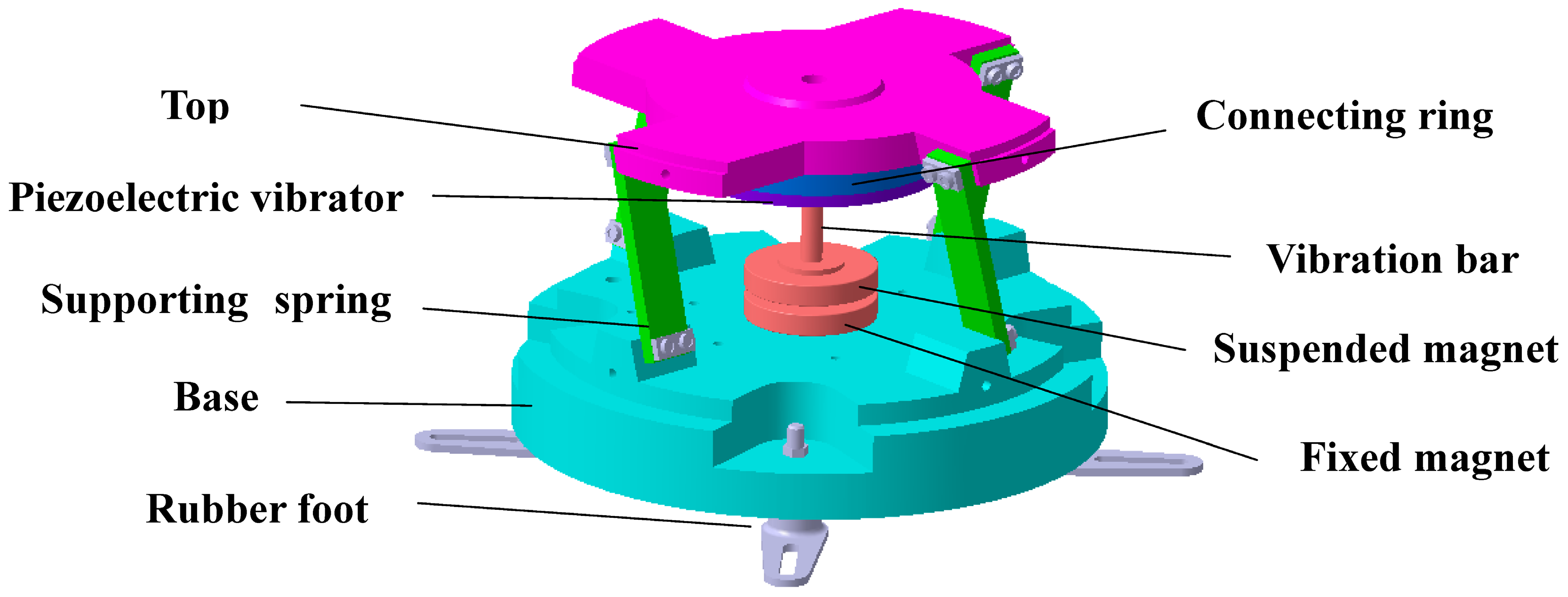
2. Structure and Working Concept
3. Stiffness Characteristic and Dynamic Model
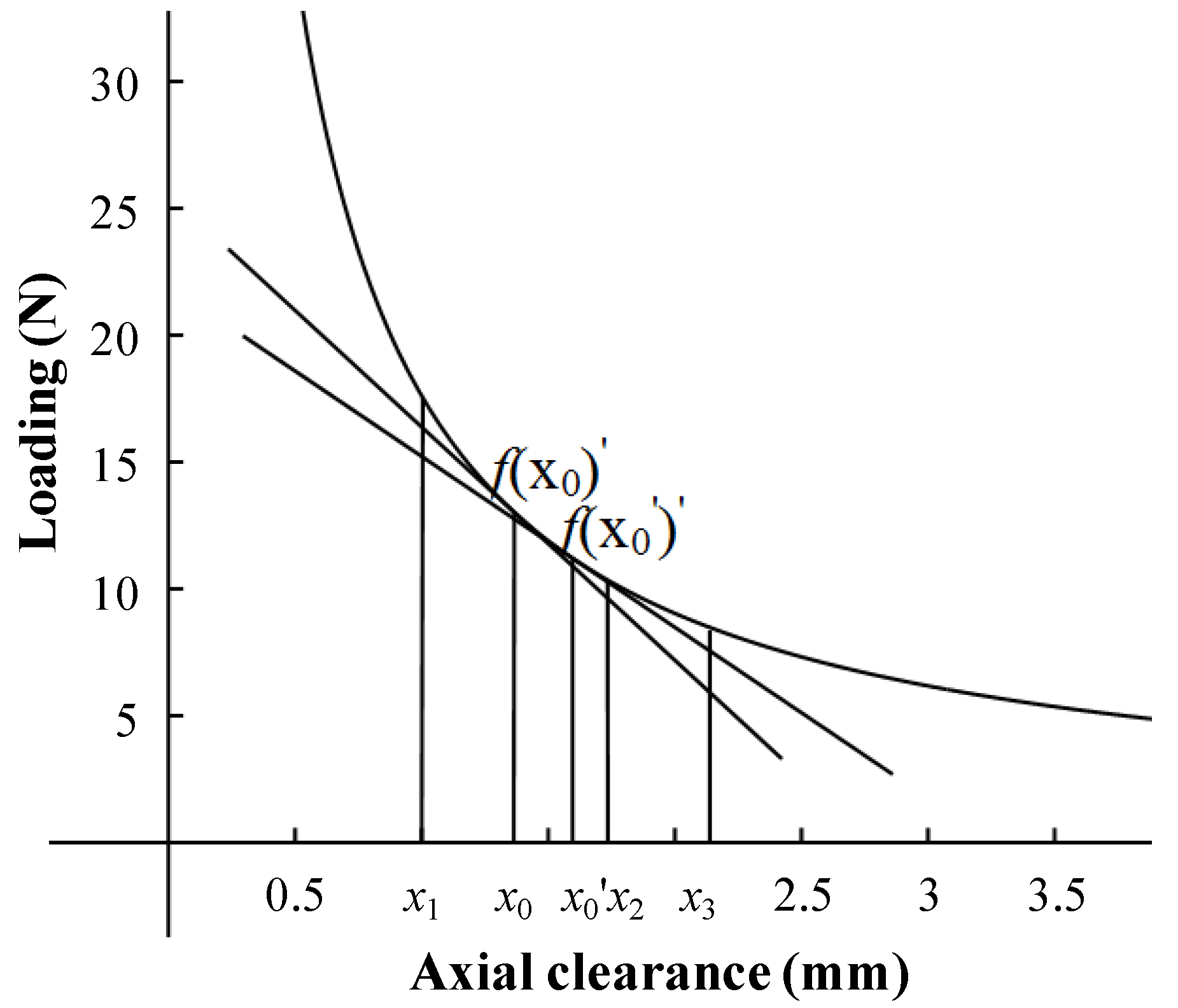
3.1. Magnetic Spring Stiffness Characteristic
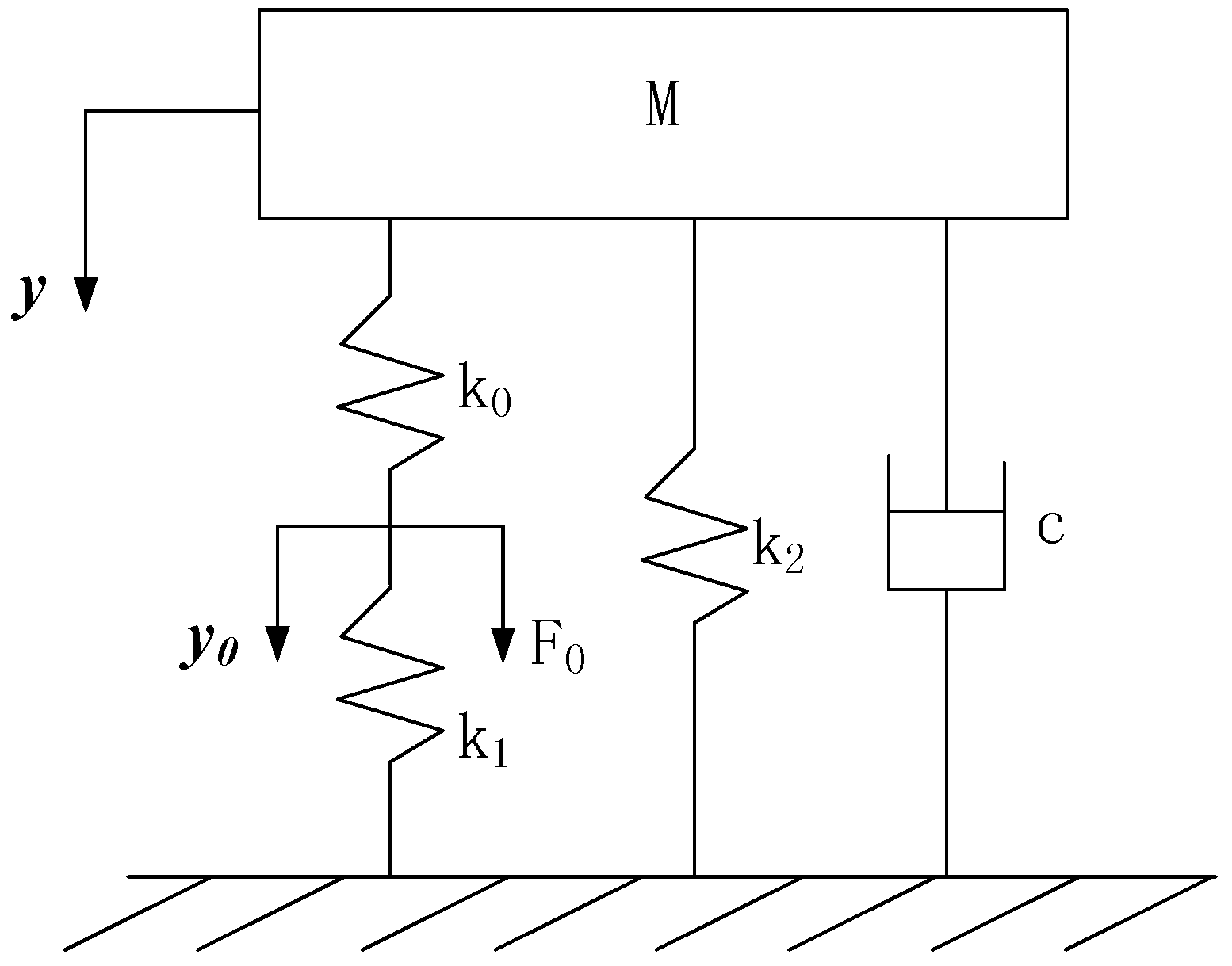
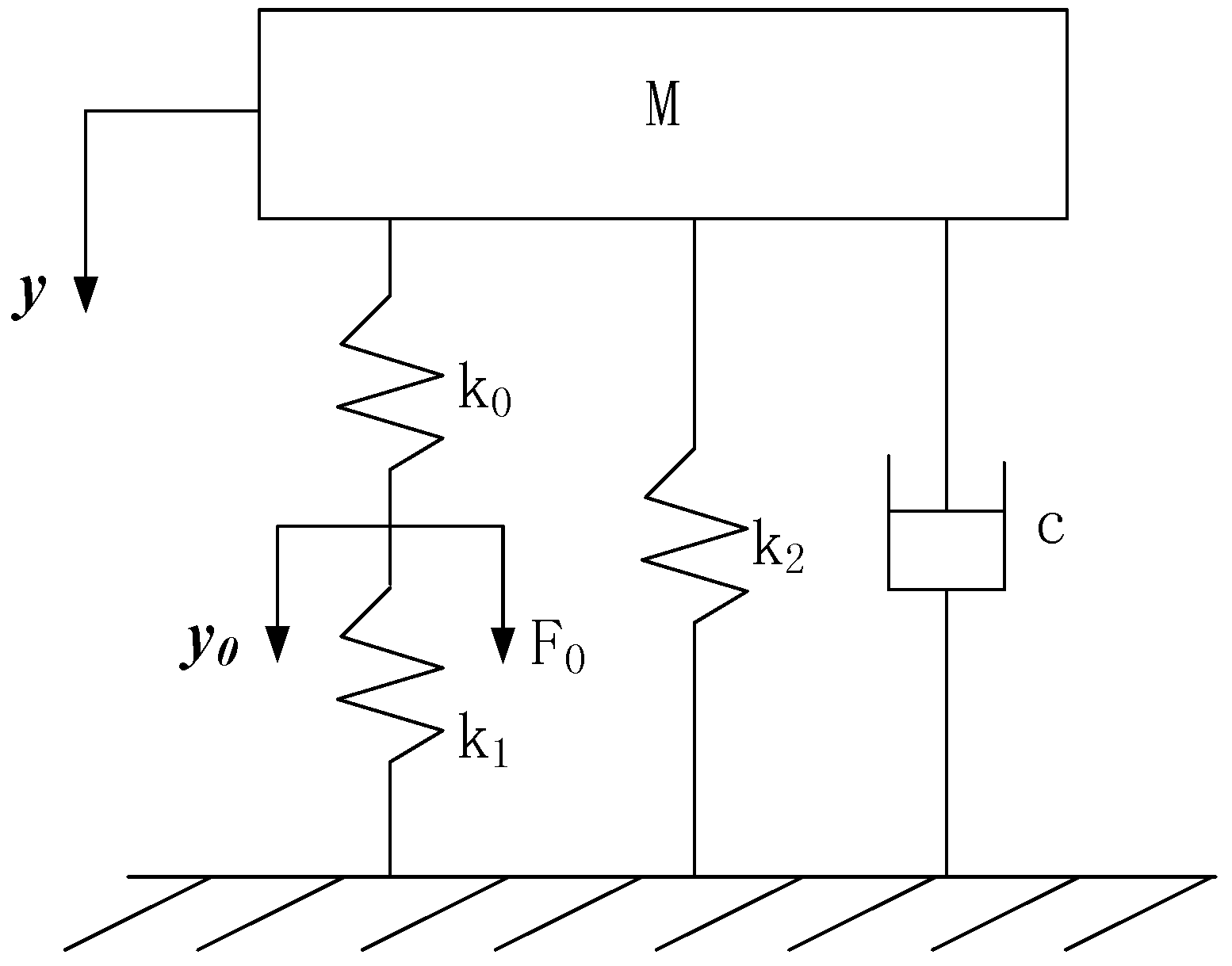
3.2. Dynamic Formula






 .
.
 , Equation (5) is
, Equation (5) is


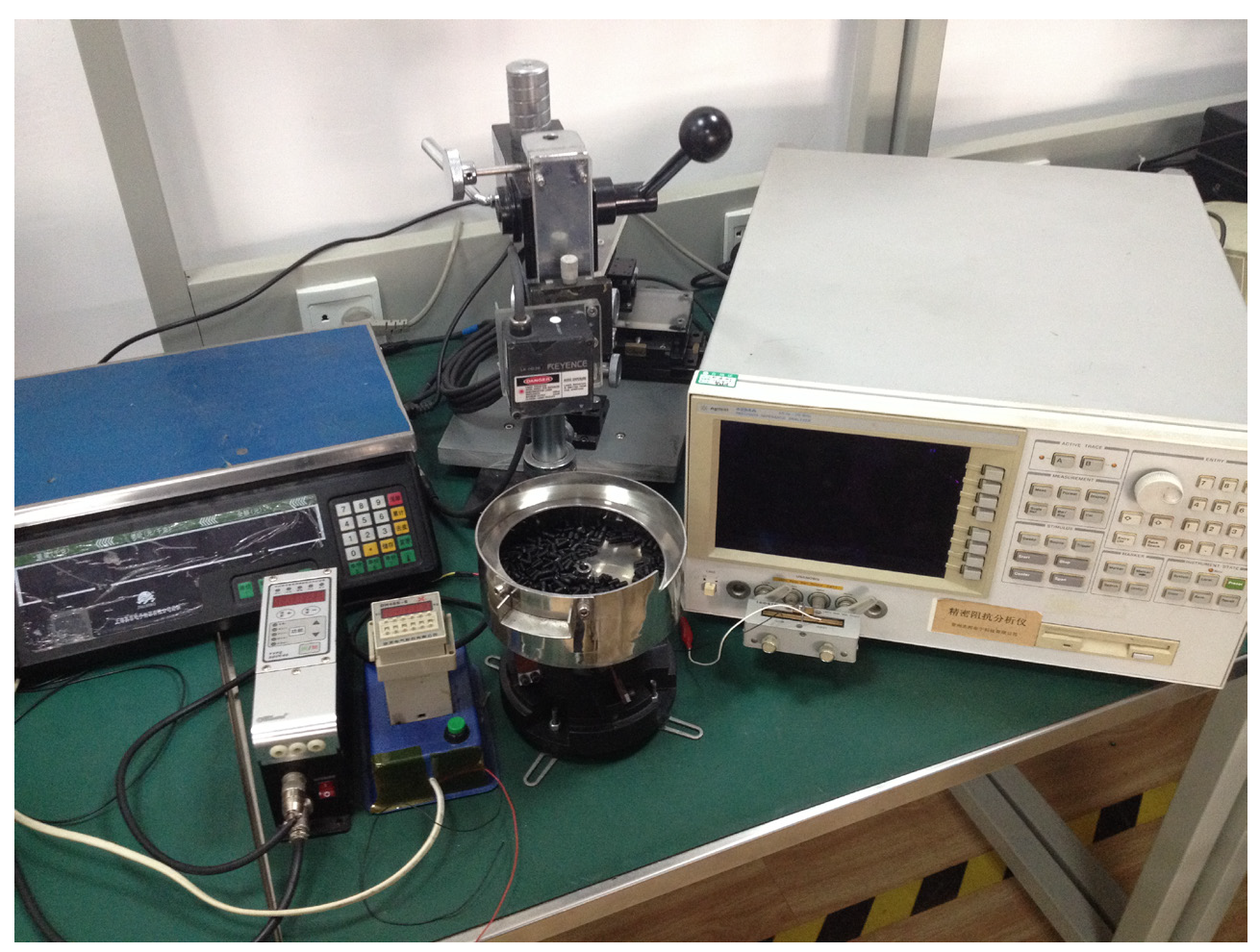
4. Performance Experiment

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Material | Outer diameter (mm) | Inner diameter (mm) | Thickness (mm) |
|---|---|---|---|---|
| Annular ceramic plate* | 60Si2MnA | 50 | 10 | 0.6 |
| Annular base plate * | 65 Mn | 72 | 4 | 1.8 |
| Annular magnet | NdFeB | 60 | 15 | 10 |
| Top plate | Aluminum Alloy | Diameter: 120 mm | ||
| Supporting spring | 65 Mn | Four springs located every 90°, tilt angle 75° between base and top plate | ||
| Base | 45# | |||
| Vibration-reducing spring | Black rubber | |||
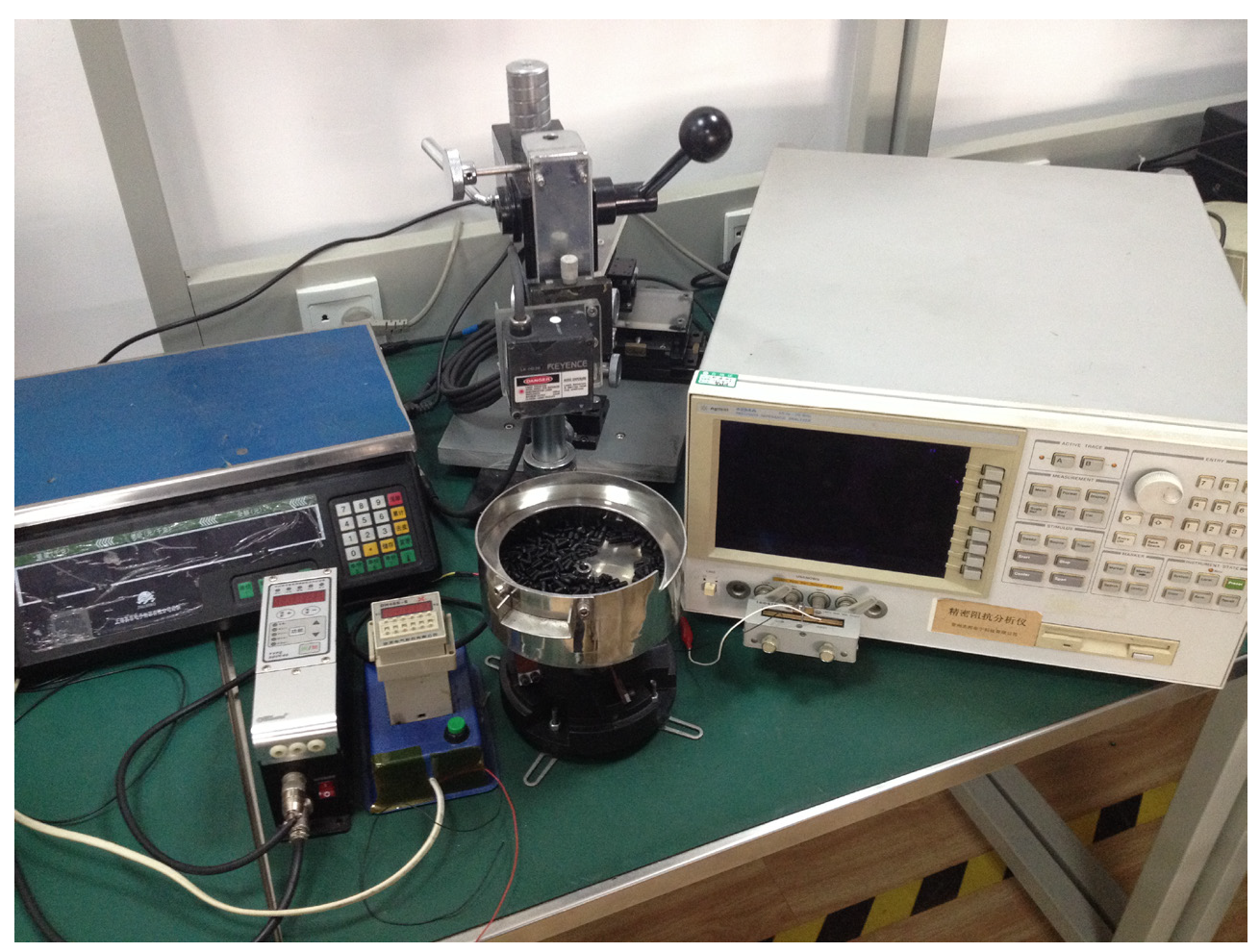

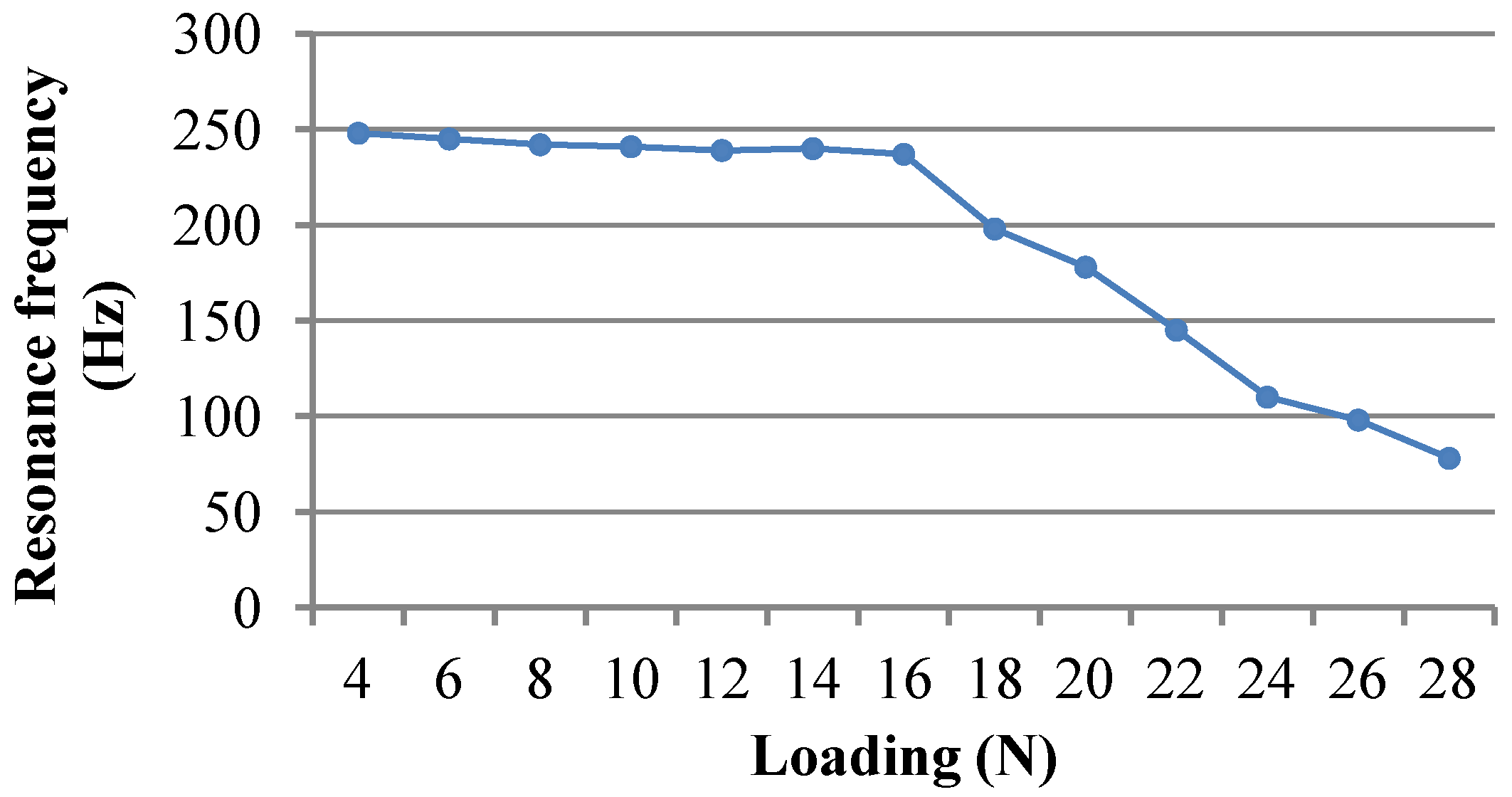
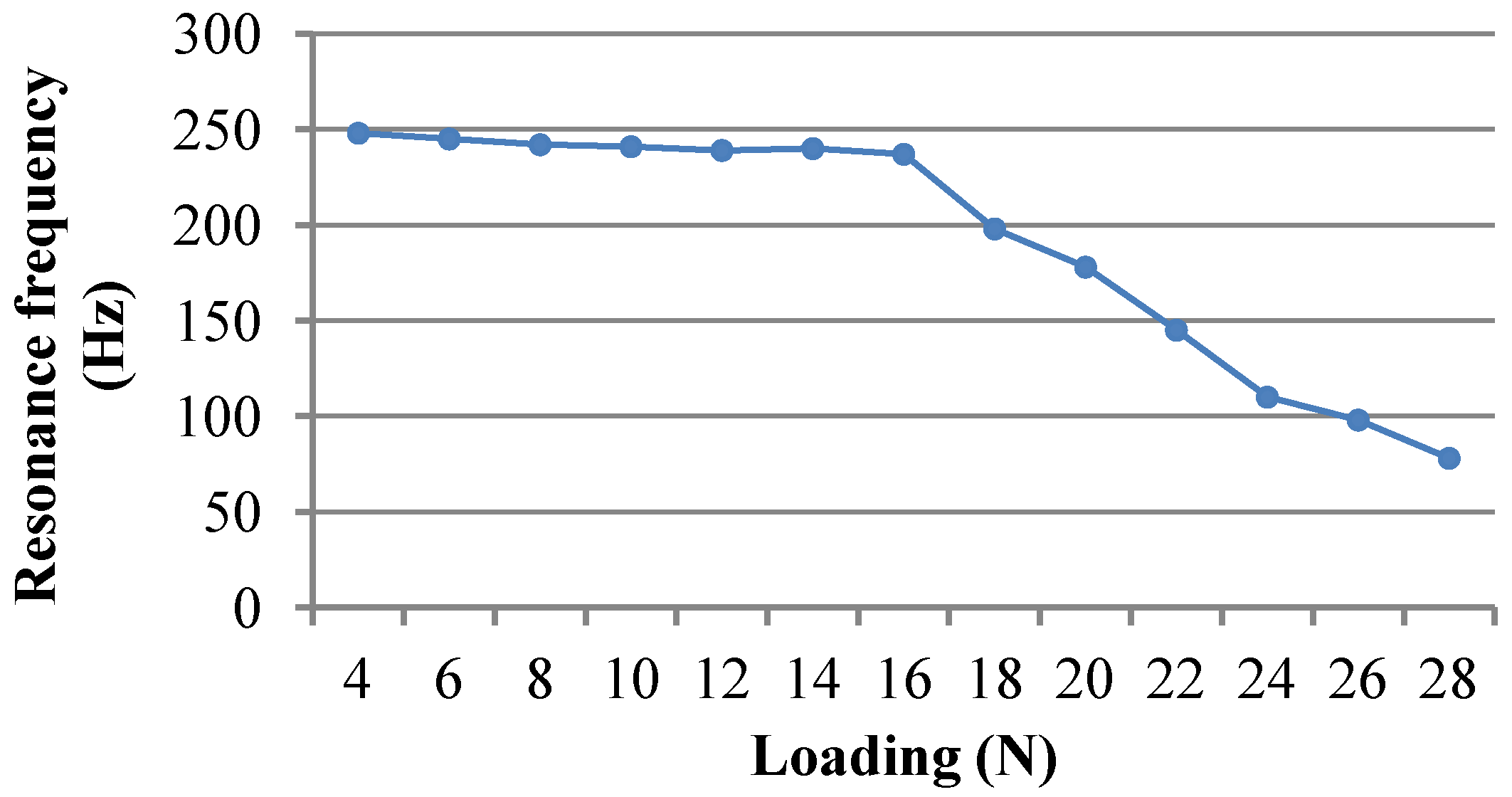
4.1. Experiment on Loading and System Resonance Frequency
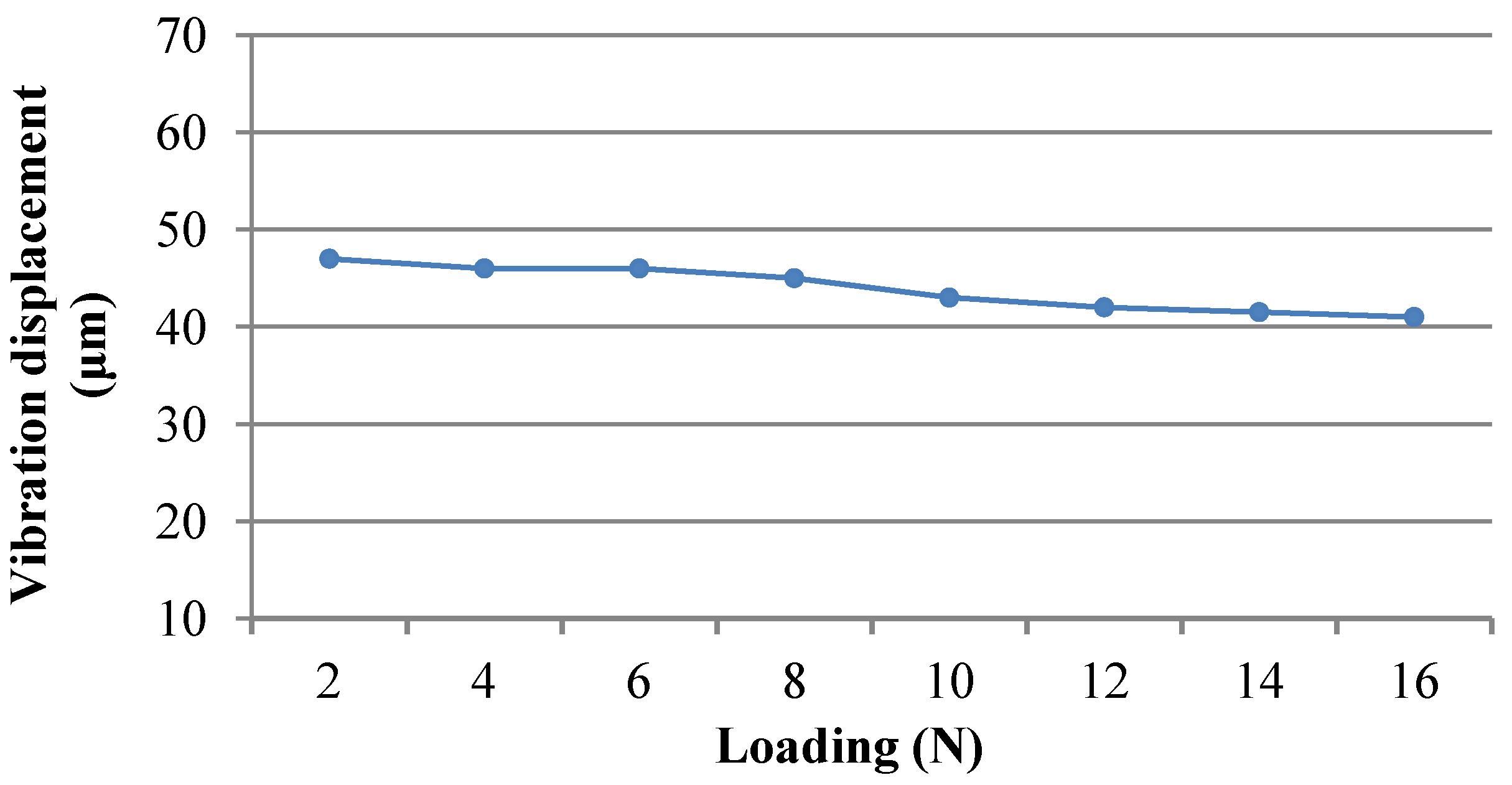
4.2. Experiment on the Relationship between System Loading and Vibration Displacement

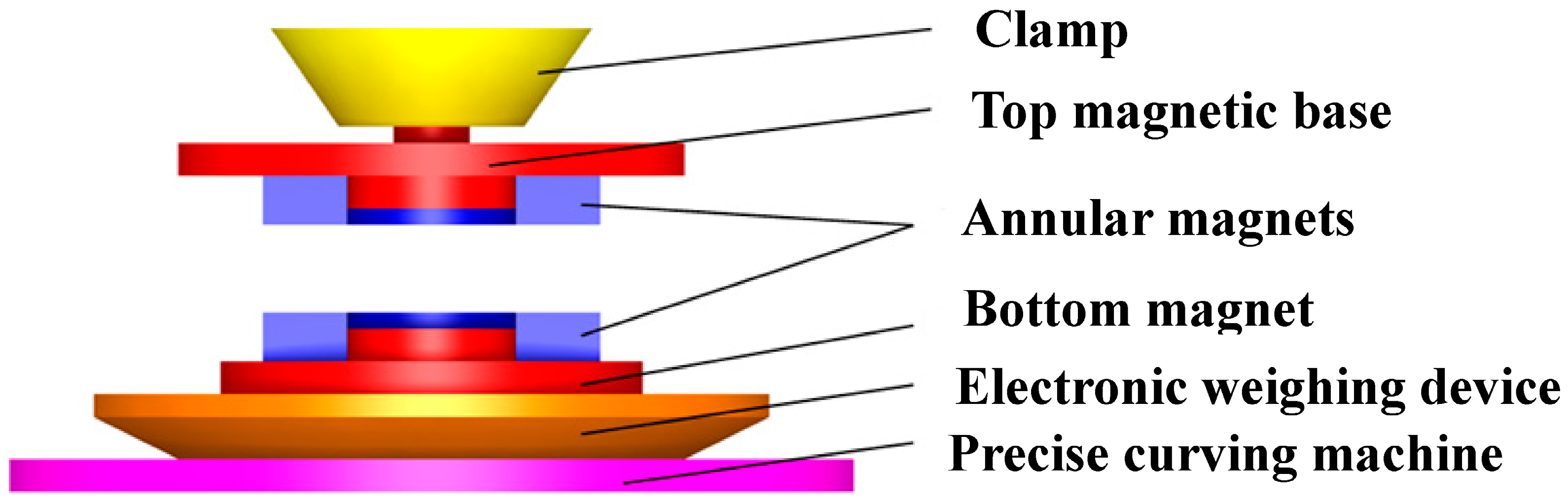
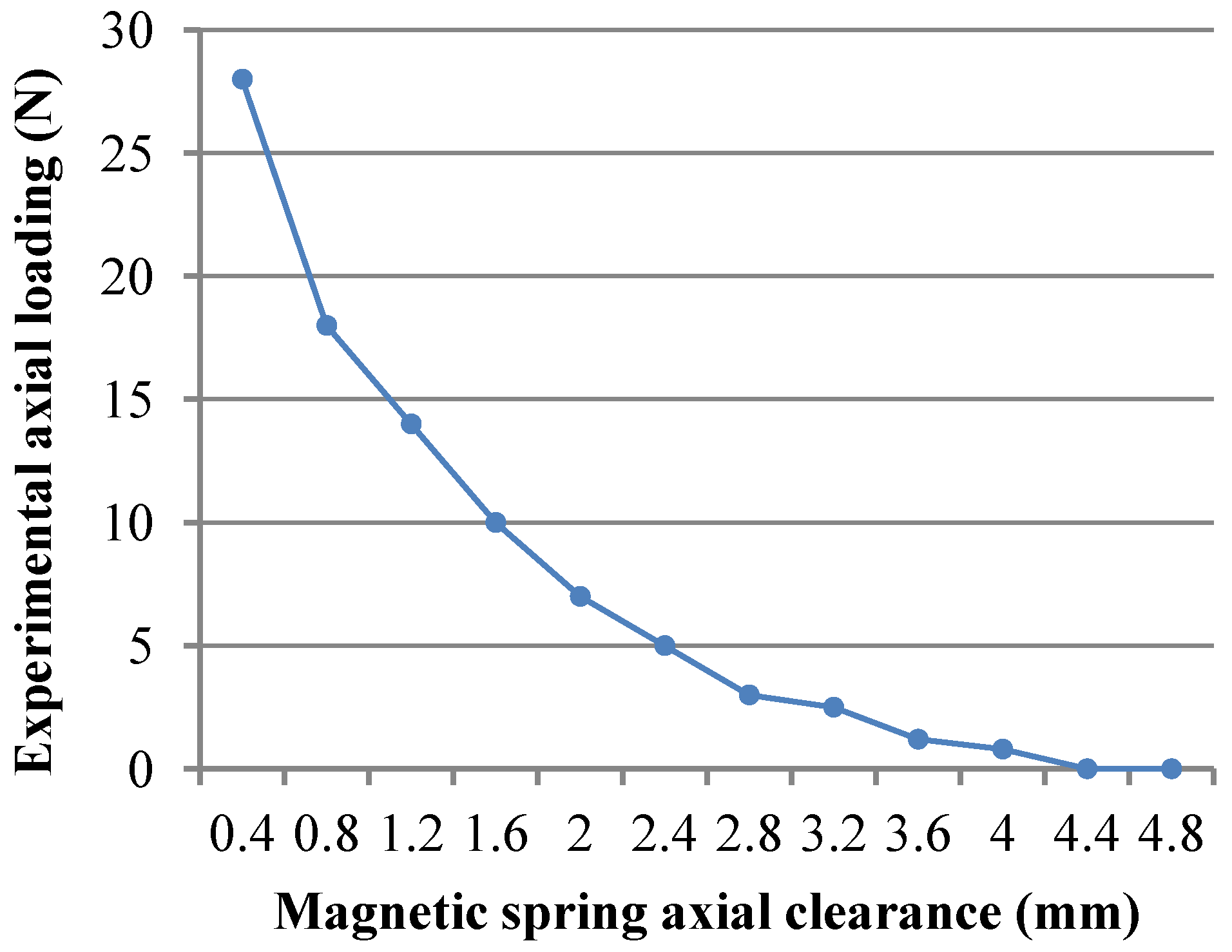
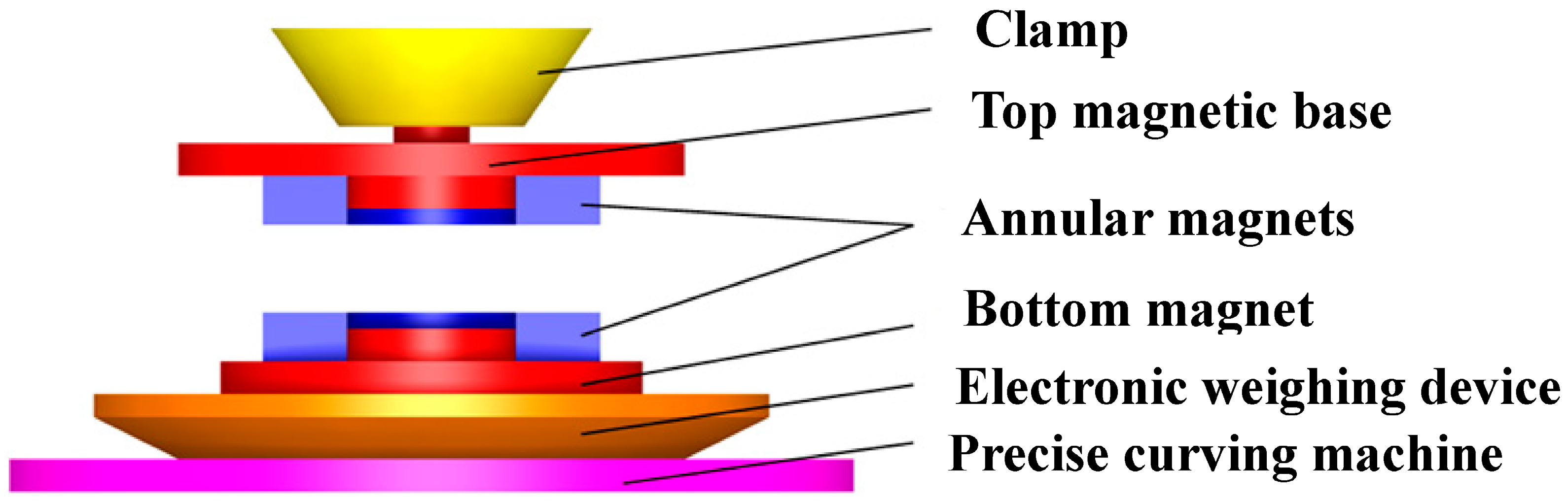
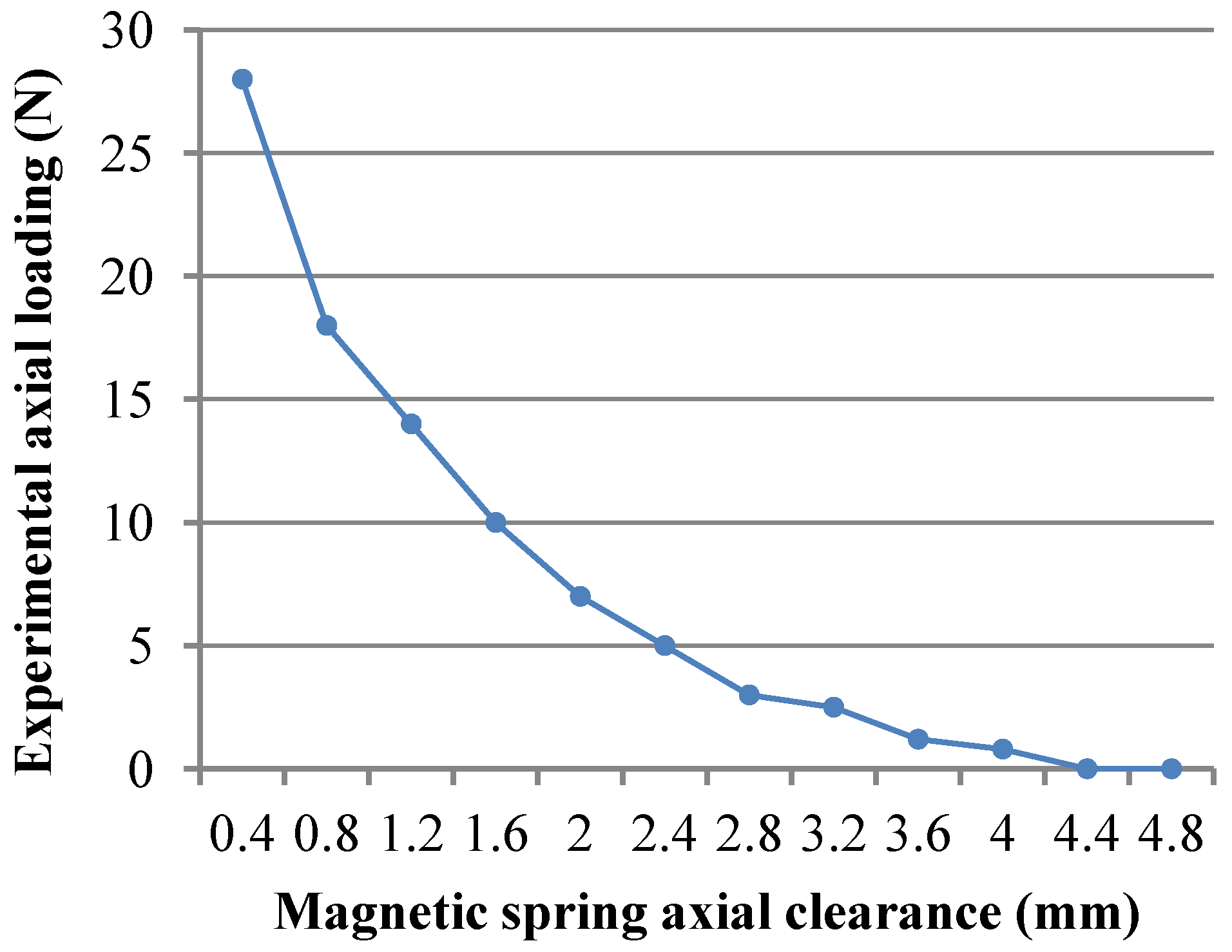
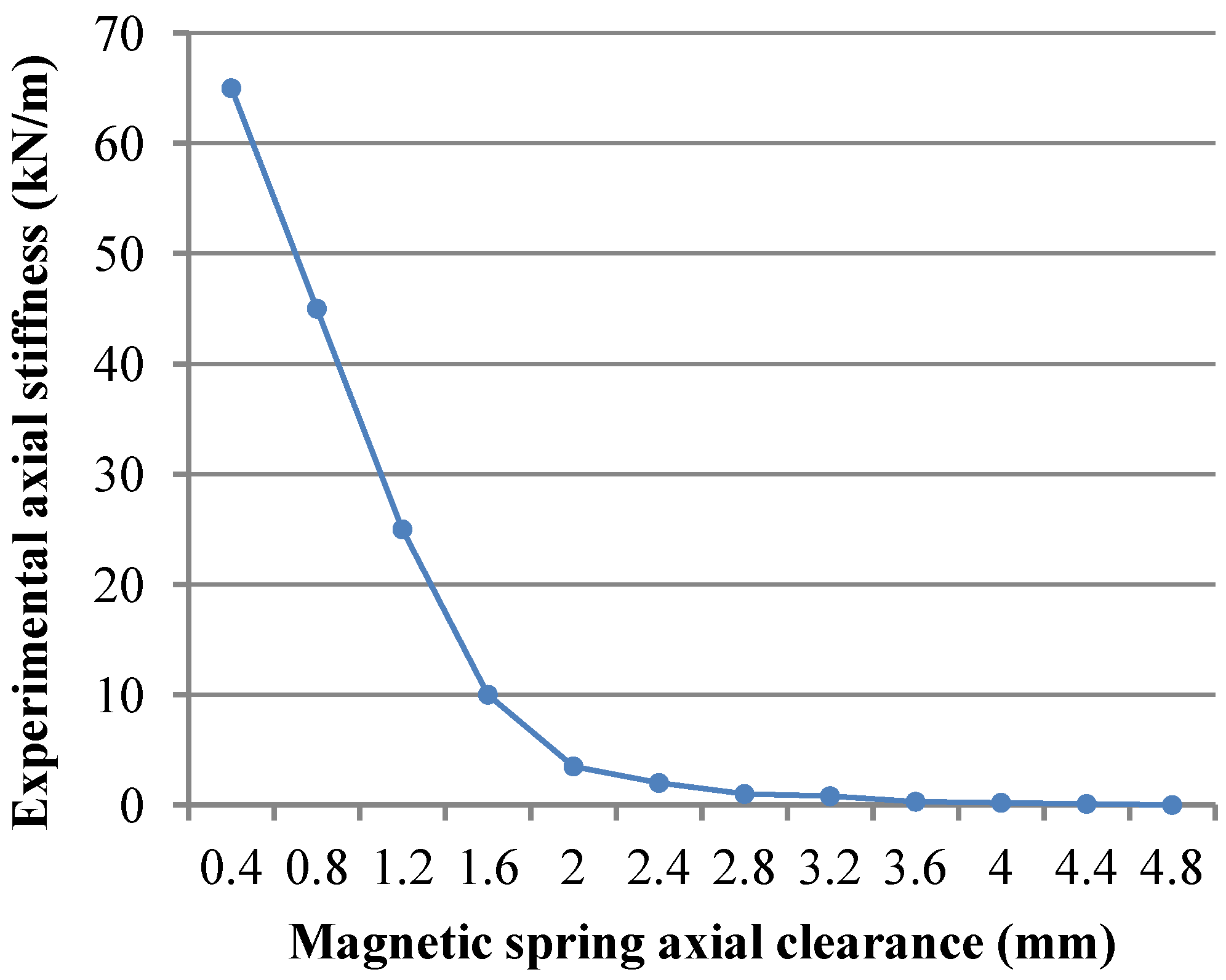
4.3. Experiment on Relationship among Magnetic Spring Loading, Stiffness and Axial Clearance
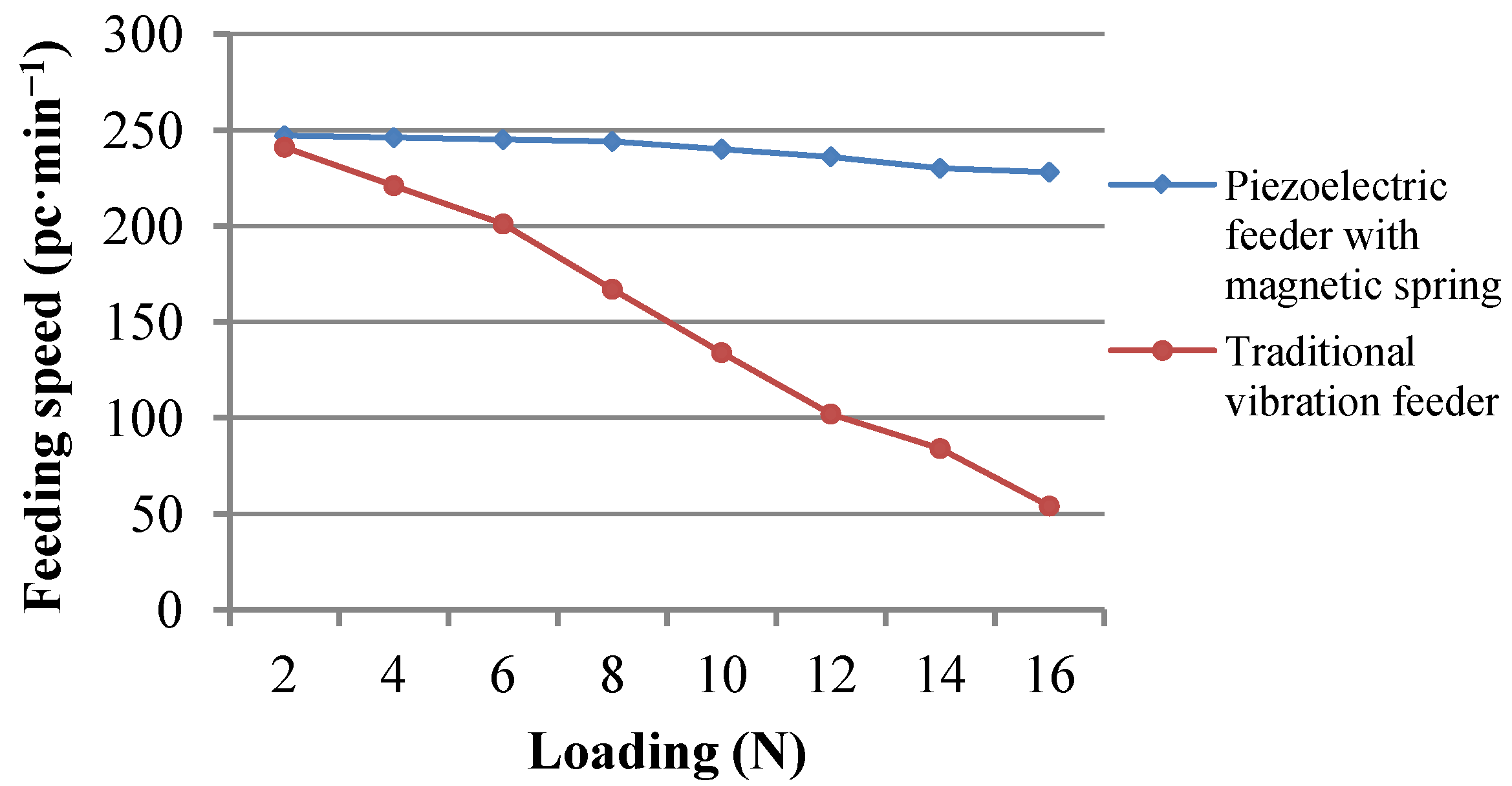
4.4. Contrast Experiment
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Geoffrey, B. Xiong, Y.; Shan, C.; Lou, W., Translators; Assembly Automation and Product Design; China Machine Press: Beijing, China, 2009. [Google Scholar]
- Huang, X. Structure improvement of electromagnetic vibrating feeder. Met. Mine Des. Constr. 2001, 33, 21–24. (In Chinese) [Google Scholar]
- NTK Technical Ceramics. Piezoelectric Vibration Feeding Device. Japan Patent 52-61087, 4 May 1977. [Google Scholar]
- Ruich, K.; Takara, F. Piezoelectric driven and piezoelectric element vibration feeder. China Patent 1380234A, 20 November 2002. (In Chinese)[Google Scholar]
- Susumu, Y. Method and apparatus for controlling piezoelectric vibration. China Patent 1338668, 6 March 2002. (In Chinese)[Google Scholar]
- Maul, G.P.; Thomas, M.B. A system model and simulation of the vibratory bowl feeder. J. Manuf. Syst. 1997, 16, 309–314. [Google Scholar] [CrossRef]
- Ting, Y.; Shin, M.S.; Chang, H.Y. Analysis and design of four-bar linkage type vibratory parts feeder driven by piezoelectric actuator. In Proceeding of ASME 2002 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Montreal, Canada, 29 September–2 October 2002; Volume 2, pp. 43–50.
- Choi, S.B.; Lee, D.H. Modal analysis and control of a bowl parts feeder activated by piezoelectric actuators. J. Sound Vib. 2004, 275, 452–458. [Google Scholar] [CrossRef]
- Chao, P.C.-P.; Chien, Y.-S. Dynamic modeling and experimental verification of a piezoelectric part feeder in a structure with parallel bimorph beams. Ultrasonics 2007, 46, 205–218. [Google Scholar] [CrossRef]
- Jiang, B.; Liu, X.L.; Yang, Z.G.; Tian, F.J.; Yu, Y. Study on vertical drive ultrasonic feeder. Opt. Precis. Eng. 2008, 16, 1082–1086. (In Chinese) [Google Scholar]
- Zhang, G.L.; Guo, H.; Zhao, C.S. Ultrasonic powder-feeding device and its application. J. Vib. Meas. Diagn. 2001, 21, 186–189. (In Chinese) [Google Scholar]
- Tian, Z.J.; Wu, W.F.; Han, F. The Experimental research on the floating piezoelectric vibratory feeder. Piezoelectrics Acoust. 2006, 28, 557–559. (In Chinese) [Google Scholar]
- Jiao, Q.W.; Cui, W.H.; Sun, B.Y.; He, C.Y. Research and produce of piezoelectric vibration feeder. Transducer Technol. 2001, 20, 23–26. (In Chinese) [Google Scholar]
- Tan, X.D.; Zhang, K. Mechanical analysis of the driven parts of piezoelectric vibration feeder. Manuf. Technol. Mach. Tool 2010, 3, 72–75. (In Chinese) [Google Scholar]
- Su, J.; Yang, Z.G.; Zhang, C.J.; Shen, Y.H. Line vibratory feeder driven by circular piezoelectric vibrator. Trans. Chin. Soc. Agric. Mach. 2013, 44, 289–292. (In Chinese) [Google Scholar]
- Li, Y.M. Research on a novel vibration bowel feeder and control system. Master’s Thesis, Tianjin University, 25 May 2005. [Google Scholar]
- Su, J.; Yang, Z.G.; Tian, F.G.; Shen, Y.H. Inertial piezoelectric vibratory feeder. Trans. Chin. Soc. Agric. Mach. 2013, 44, 281–286. (In Chinese) [Google Scholar]
- Qian, K.X.; Lu, L.C.; Ru, W.M.; Zheng, M.; Ma, L.Z. A magnetic spring and its elasticity. Chin. J. Mech. Eng. 1998, 34, 57–59. (In Chinese) [Google Scholar]
- Cai, C.C.; Xu, Z.F.; Zhuang, J.P.; Yu, H. The analysis of working property for magnetic spring. Equip. Des. Maint. 2003, 6, 73–74. (In Chinese) [Google Scholar]
- Yang, H.; Zhao, H. Study on dynamic characters of rare earth permanent magnetic spring. Trans. Chin. Soc. Agric. Mach. 2003, 34, 111–117. (In Chinese) [Google Scholar]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Tian, X.; Yang, Z.; Liu, Y.; Shen, Y.; Chen, S. Structural Design and Experimental Analysis of a Piezoelectric Vibration Feeder with a Magnetic Spring. Micromachines 2014, 5, 547-557. https://doi.org/10.3390/mi5030547
Tian X, Yang Z, Liu Y, Shen Y, Chen S. Structural Design and Experimental Analysis of a Piezoelectric Vibration Feeder with a Magnetic Spring. Micromachines. 2014; 5(3):547-557. https://doi.org/10.3390/mi5030547
Chicago/Turabian StyleTian, Xiaochao, Zhigang Yang, Yong Liu, Yanhu Shen, and Song Chen. 2014. "Structural Design and Experimental Analysis of a Piezoelectric Vibration Feeder with a Magnetic Spring" Micromachines 5, no. 3: 547-557. https://doi.org/10.3390/mi5030547