1. Introduction
Synthetic Aperture Radar (SAR) is a microwave remote sensing sensor that can be mounted on spaceborne platforms [
1,
2], airplanes [
1,
2], helicopters [
3], drones [
4], cars [
5] and ground stations [
6,
7], and allows all-weather, night and day imaging of the illuminated area. In particular, exploitation of the phase difference, named interferogram, between focused SAR data pairs acquired by antennas that illuminate the same area from different positions and/or at different times makes it possible to obtain key information on the observed scene [
1,
2,
8,
9] through the so-called SAR Interferometry (InSAR) technique.
More specifically, if two SAR antennas are simultaneously present and displaced along the across-track (XT) plane, that is, the direction orthogonal to the radar flight one, the corresponding interferogram is sensitive to the topography of the illuminated area [
1,
2,
10]. In this case, the interferometric technique is referred to as XT-InSAR, and allows us to generate a Digital Elevation Model (DEM) of the observed scene. In fact, an XT-InSAR configuration can be obtained either with a single pass of a multiple antenna system or with repeat passes of a single antenna system.
If two SAR antennas are instead displaced along the radar flight track, the SAR data relevant to the same target are acquired by the different antennas with a short time lag. Accordingly, for each illuminated target, the interferogram is sensitive to the changes (if any) of the sensor-to-target distance occurred during this time lag [
11,
12]. In this case, the interferometric technique is referred to as Along Track InSAR, briefly AT-InSAR, and allows us to monitor fast-varying phenomena occurring in the observed area, such as those related to currents and waves in marine scenarios [
11,
12,
13,
14,
15,
16] or to the vehicle fluxes in marine as well as land scenarios [
17].
Finally, if the antennas are displaced along both the XT and AT directions, the corresponding interferogram is sensitive to both the topography of the illuminated scene as well as the fast-varying phenomena occurred in the time interval elapsed between the different acquisitions carried out by the different antennas. Accordingly, exploitation of a hybrid XT/AT InSAR configuration in marine scenarios involves advanced remote sensing features, because it allows simultaneous retrieval of both the height profile and the velocity of the observed sea surface. Of course, this entails the application of a proper data processing strategy aimed at separating the XT contribution (which is sensitive to the sea surface height) from the AT one (which is sensitive to the sea surface velocity), both present in the obtained interferogram. This task is however not straightforward, and needs to be carefully addressed.
In particular, if a two-antenna hybrid XT/AT InSAR configuration is available, some assumptions on the nature of the observed scene must be necessarily done. For instance, in the airborne experiment in [
18] two antiparallel acquisitions were carried out with a time delay of 10 min. In this way, two different single-pass interferograms relevant to the same scene and acquired at different times were collected. Under the assumption that the sea conditions did not change between the repeated passes of the airplane, proper combination of these two single-pass interferograms allowed retrieving the searched XT and AT contributions. However, especially in marine scenarios characterized by strong currents and waves, the assumption that the sea conditions do not significantly change in the time span elapsed between the repeated radar passes may be not well satisfied, even with an airborne platform, which generally allows keeping quite small the time lag between the different flight tracks.
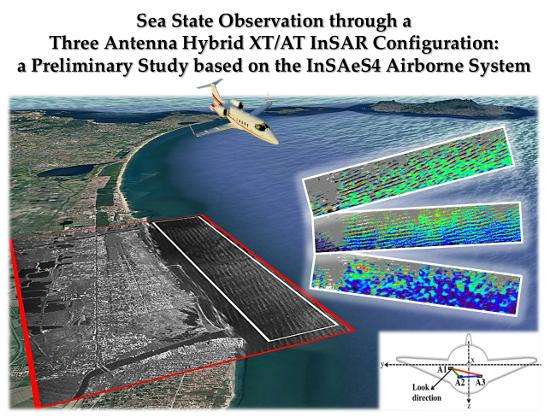
To overcome this problem, we exploit in this work the three-antenna hybrid XT/AT InSAR configuration of the airborne X-Band InSAeS4 SAR system [
19]. Moreover, we propose a simple but effective methodology that allows simultaneous retrieval of the sea surface height and velocity by means of a straightforward, easy-to-implement, linear inversion procedure. Indeed, due to the availability of a three-antenna hybrid XT/AT InSAR configuration, it is possible to acquire, simultaneously, two independent interferograms containing the same information about the height and the velocity of the illuminated sea surface. This makes it possible the straightforward separation of the XT and the AT contributions present in the two interferograms, thus allowing us to jointly estimate, on a pixel-by-pixel basis, the velocity and height of the illuminated marine scene.
The proposed methodology, which is very general and can be implemented with any system equipped with a three-antenna hybrid XT/AT InSAR configuration, has been here applied to an interferometric data-set acquired on January 2013 by the InSAeS4 SAR system along the coastline stretch of the Campania region, South of Italy, over the Volturno River.
The work is organized as follows. In
Section 2, we provide a brief description of the InSAeS4 system. In
Section 3, we present the main rationale of the algorithm that carries out the separation of the XT and AT contributions by exploiting a couple of independent interferograms acquired by a three-antenna hybrid XT/AT InSAR system. The experimental results are shown in
Section 4.
Section 5 is devoted to the concluding remarks.
3. Rationale of the Proposed Methodology
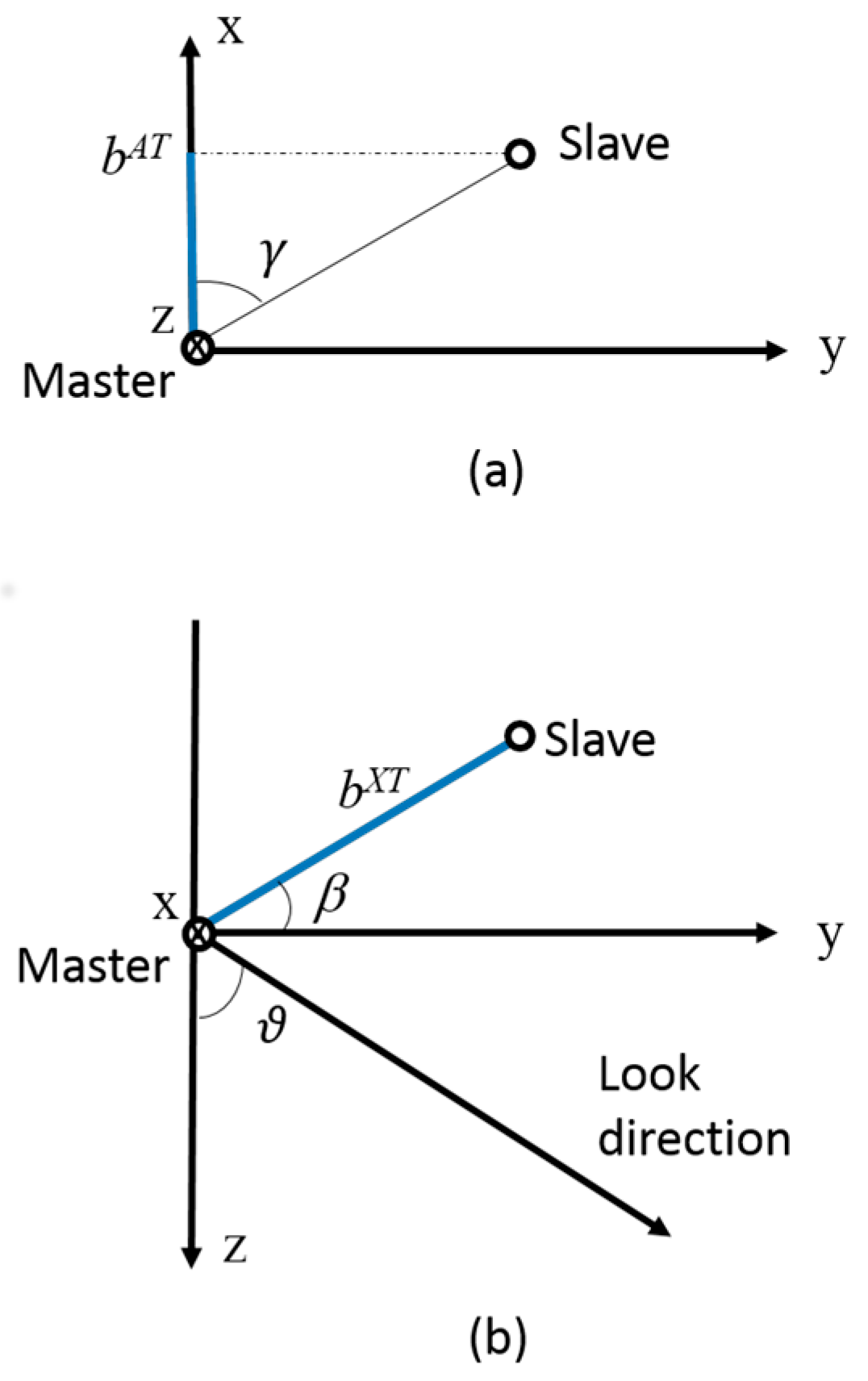
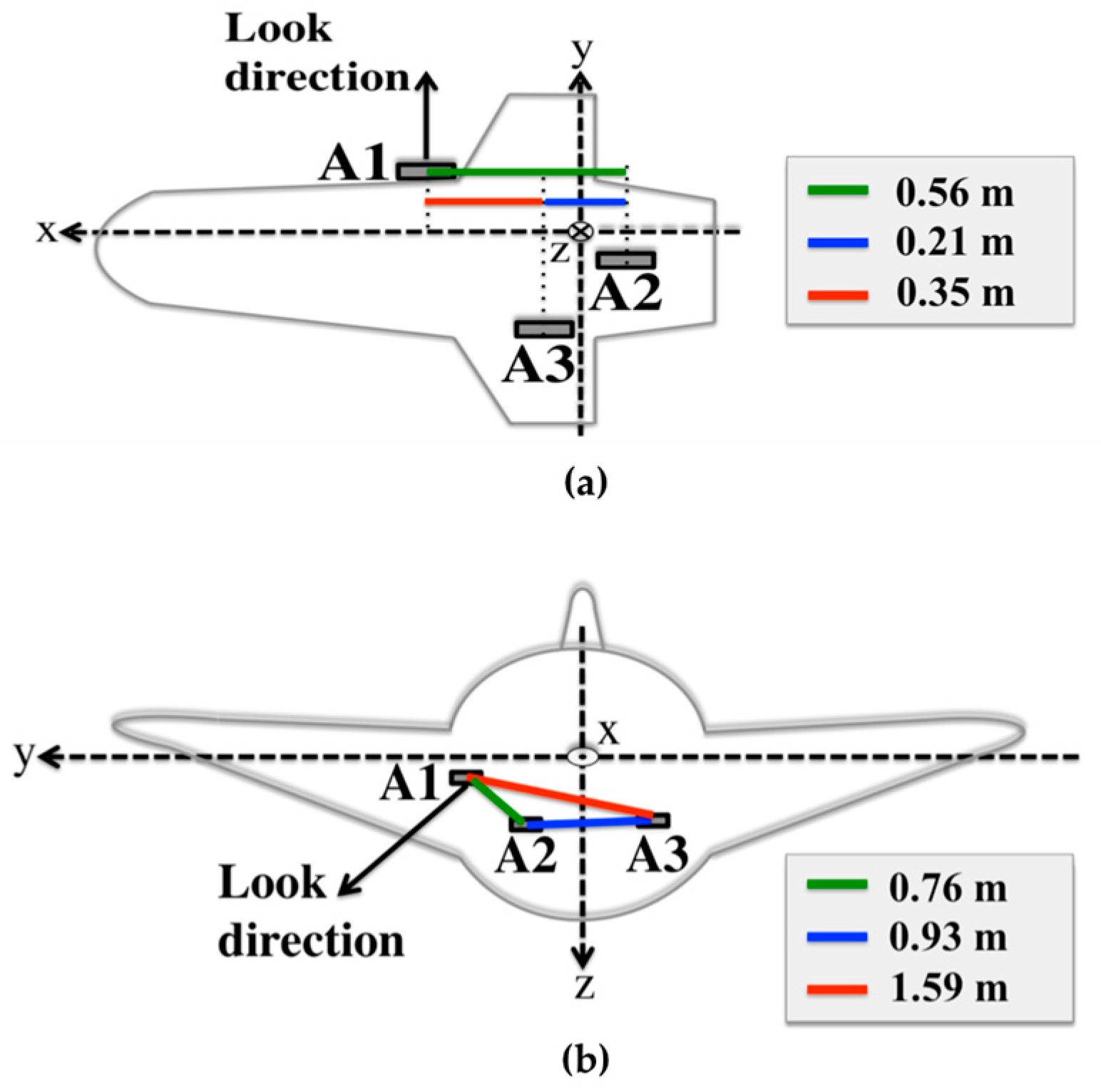
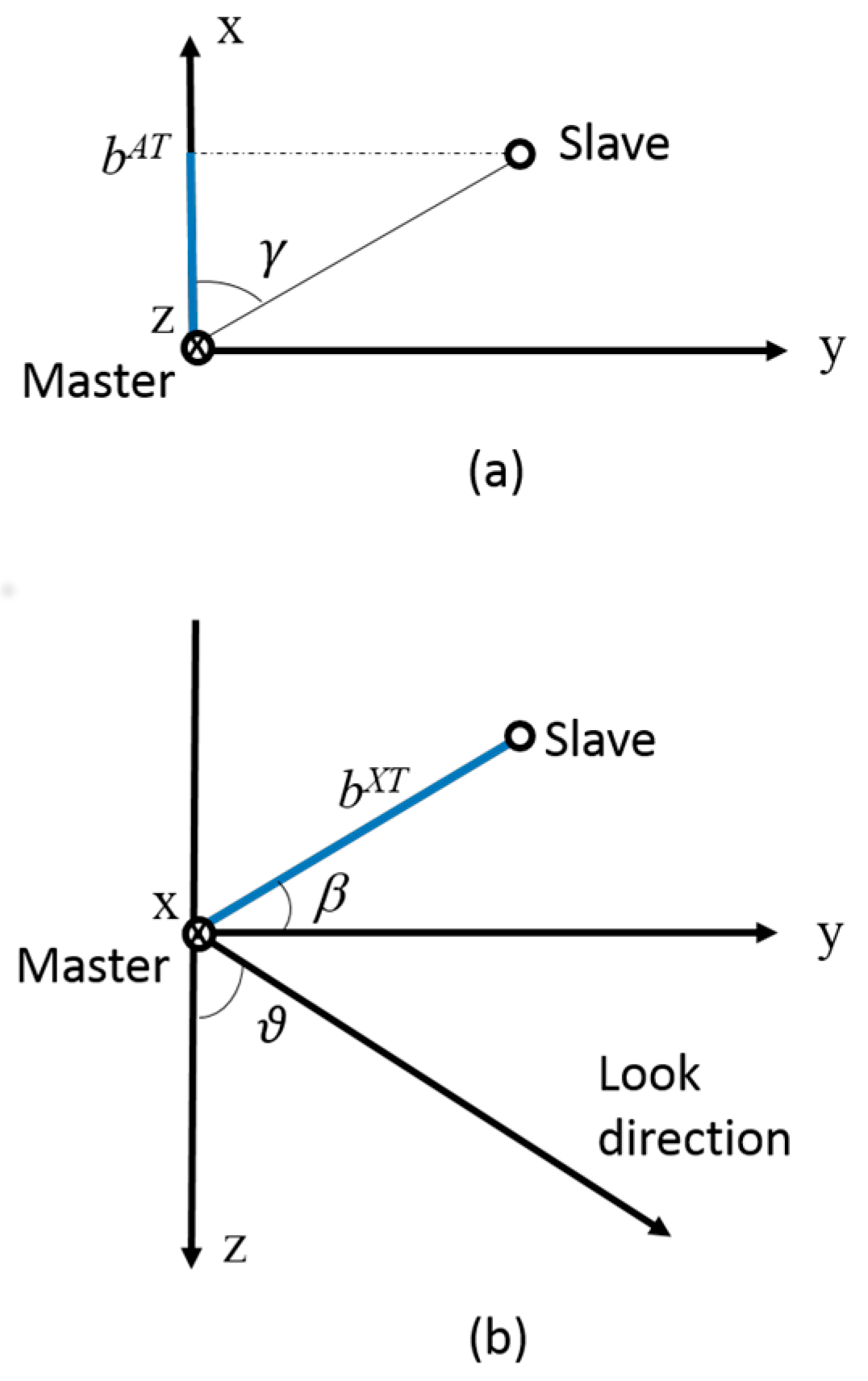
Let us consider a three-antenna hybrid XT/AT InSAR configuration, such as (but not necessarily equal to) that depicted in
Figure 1. Following the figure notation, the three antennas are named
Ai,
i {1, 2, 3}, and the corresponding interferometric channels are named 1, 2 and 3, respectively.
In the following, for the sake of generality, we will consider the airborne SAR case, thus assuming the sensor velocity and the squint angle not constant during the acquisition. In this regard, we underline that the output SAR grid is chosen hereafter with respect to a nominal one, that is rectilinear, representing the reference track relevant to the actual master track [
21]. Accordingly, in the following, the azimuth direction is coincident with such nominal direction. Moreover, for sake of simplicity, the mean squint angle during the acquisition is assumed to be zero. Anyway, extension to (on average) squinted acquisitions will be discussed at the end of this section.
Let us consider a marine scenario and denote with ∆
ϕij the interferogram obtained with the interferometric channels
i and
j, being
i the master channel and
j the slave one, respectively. It is assumed that the interferogram ∆
ϕij has been flattened (i.e., the topographic contribution provided by an available, even low accuracy, external DEM, such as the SRTM [
22] one, has been removed) and unwrapped [
1]. Moreover, it is also assumed that the constant phase offset introduced in the interferogram by the phase unwrapping procedure has been properly removed [
23]. In the most general case, that is, when both the XT and AT baseline components are present in the considered interferometric pair, ∆
ϕij is sensitive to both the topography of the illuminated area and the fast-varying phenomena therein occurred between the different acquisitions carried out by the different antennas. Accordingly, for each pixel of such interferogram it possible to write:
where ∆
z is the difference between the vertical height of the considered target and the reference vertical height provided by the external DEM exploited to flatten the interferograms, and
ur is the Line-Of-Sight (LOS) component of the target velocity. More specifically, in a marine scenario,
ur is the sum of three contributions: the LOS components of the orbital motion of water particles from the swell, the phase velocity of the Bragg waves and any underlying ocean currents that may exist [
11]. Moreover, the expressions of the coefficients
αij and
ηij in Equation (1) can be found in [
1,
11], respectively, and are reported in the following:
where
x and
r are the azimuth and range coordinates, respectively, of the considered pixel. Furthermore, in Equations (2) and (3), as usual, the subscripts
i and
j denote the interferometric channels relevant to corresponding interferogram;
λ is the wavelength of the carrier signal and the coefficient
d depends on the exploited interferometric configuration (
d = 1 for bistatic systems, whereas
d = 2 for monostatic ones). Moreover, in Equation (2)
ϑ(
x,
r) is the look angle,
is the so called orthogonal baseline [
1,
10] (which depends, in turn, on the XT baseline component and the look angle
ϑ(
x,
r), see [
1]). Finally, in Equation (3)
is the AT baseline component (defined as the difference between the azimuth coordinates of the antennas
i and
j) and
is the azimuth component of the aircraft velocity. It is stressed that, according to the notation adopted in Equations (1)–(3), when a generic observed target recedes from the radar the radial velocity
ur in Equation (1) is negative. It is also remarked that, due to the aircraft attitude variations, the quantity
changes (although very marginally) during the acquisition. In this regard, it is also noted that in the satellite case, where the sensor tracks are very stable, both
and
can be safely assumed constant during the flight, thus rendering the coefficient
in Equation (3) constant as well in the overall interferogram.
When a three-antenna hybrid XT/AT InSAR configuration is used, two independent interferograms are available. Therefore, according to Equation (1), for each pixel it is possible to build a linear system of two equations in two unknowns:
where
collects the two available interferograms,
collects the two unknowns and
. It is worth highlighting that the system in Equation (4) is linear due to the approximations adopted in Equation (1). On the other side, as shown now in the following, such approximations are often appropriate.
More specifically, with reference to the XT InSAR contribution, we have considered in Equation (2) the well-known linear Taylor’s expansion of the (nonlinear) operator that carries out the phase-to-height conversion [
1,
10]. Such an approximation can be safely applied in a marine scenario where the height of the sea surface (that is, the amount of ∆
z in Equation (1)) is expected to be at most on the order of some meters.
Moreover, in Equation (1), it has been neglected the non-linear term that arises when observing a moving target with an InSAR data pair characterized by a non zero XT baseline component. To better clarify this point, we recall that:
- (i).
The SAR impulse response of a target moving with radial velocity
ur is affected by an azimuth shift equal to
[
16] and an azimuth phase ramp whose rate
γ is equal to
[
24].
- (ii).
In an InSAR data pair separated by an XT baseline component, the same (even steady) target is located at two different range coordinates [
1]
ri and
rj (where, as usual,
i denotes the master channel and
j the slave one) differing by an amount
δrij = rj − ri.
Accordingly, combining effects (i) and (ii) leads to the following azimuth misregistration term [
18]:
and then to the following InSAR phase contribution
As shown in
Appendix A, in our experiment the extra-phase term in Equation (6) can be safely neglected in Equation (1).
Turning to the AT InSAR contribution, we have exploited in Equation (3) the same linear relation originally proposed in [
11], thus neglecting the nonlinear effects discussed in [
16] and related to the velocity bunching. With particular reference to the InSAeS4 system described in
Section 2, such an approximation can be safely applied because the
r/
Vx ratio is quite small. Indeed, it ranges from about 50 s in near range to 65 s in the near to coast area of
Figure 2, thus being on the same order of magnitude of that found in the X-Band airborne SAR experiment presented in [
18] (50 s), where exploitation of the linear relation in Equation (3) rather than the exact one is safely adopted.
Summing up, under the conditions discussed above, with a three-antenna hybrid XT/AT InSAR configuration the separation of the XT and AT InSAR contributions from the available interferograms can be straightforwardly achieved, on a pixel-by-pixel basis, through the inversion of the linear system of two equations in two unknowns reported in Equation (4). In this regard, we note that different options involving the design of the three-antenna layout of a hybrid XT/AT InSAR configuration are possible in order to obtain a full rank system matrix M in Equation (4).
The first, obvious possibility is to deploy the three-antennas in such a way to render the diagonal elements of the matrix M in Equation (4) all equal to zero. This means that (in the absence of pitch and yaw) a couple of antennas are separated only by an XT baseline, whereas other two of them are separated only by an AT baseline. In this case, the two unknowns, namely ur and ∆z, are already separated in the two interferograms, thus rendering this layout particularly attractive in marine scenarios.
On the other side, in land scenarios, where one is interested in calculating only the DEM of the observed scene, such kind of layout cuts off the possibility of exploiting two different XT baseline components to improve the accuracy of the final InSAR DEM in regions characterized by steep topography [
25]. For this reason, a more flexible solution, optimally tailored to land scenarios and well exploitable also over marine ones, is the one depicted in
Figure 1, where the antennas are deployed in such a way to render all the coefficients of the matrix
M in Equation (4) not equal to zero. Indeed, as stressed above, in this case separation of the XT and AT InSAR contributions, both present in the available interferograms, can be easily obtained just inverting the linear system in Equation (4).
Extension of the model in Equations (1)–(4) to squinted acquisitions is now discussed.
When considering a hybrid XT/AT InSAR configuration in the presence of a squint angle, say
φs, the azimuth misregistration term in Equation (5) is responsible also for the following phase contribution:
where use of Equation (5) has been done in the last equality of Equation (7). This extra phase term, however, does not act on the linearity of the system in Equation (4) and can be easily accounted for by still applying Equation (1), provided that the following substitution:
is done in Equation (3).
It is finally remarked that the unavoidable presence of errors in the calculation of the orthogonal baseline (
) and the
AT baseline (
bAT) may impair, at least in principle, the accuracy of the inversion of the linear system in Equation (4). However, as shown in
Appendix B, in our experiment these effects can be safely neglected.
4. Experimental Results
In this section, we have applied the methodology presented in
Section 3 to a real data-set acquired by the InSAeS4 system, exploiting its three-antenna hybrid XT/AT InSAR configuration depicted in
Figure 1. The experiment is relevant to the test-flight campaign carried out during January 2013 along a coastline stretch of the Campania region, in the South of Italy, including the estuary of the Volturno River.
SAR data have been transmitted with 100 MHz bandwidth.
Table 3 collects the main mission and data processing parameters.
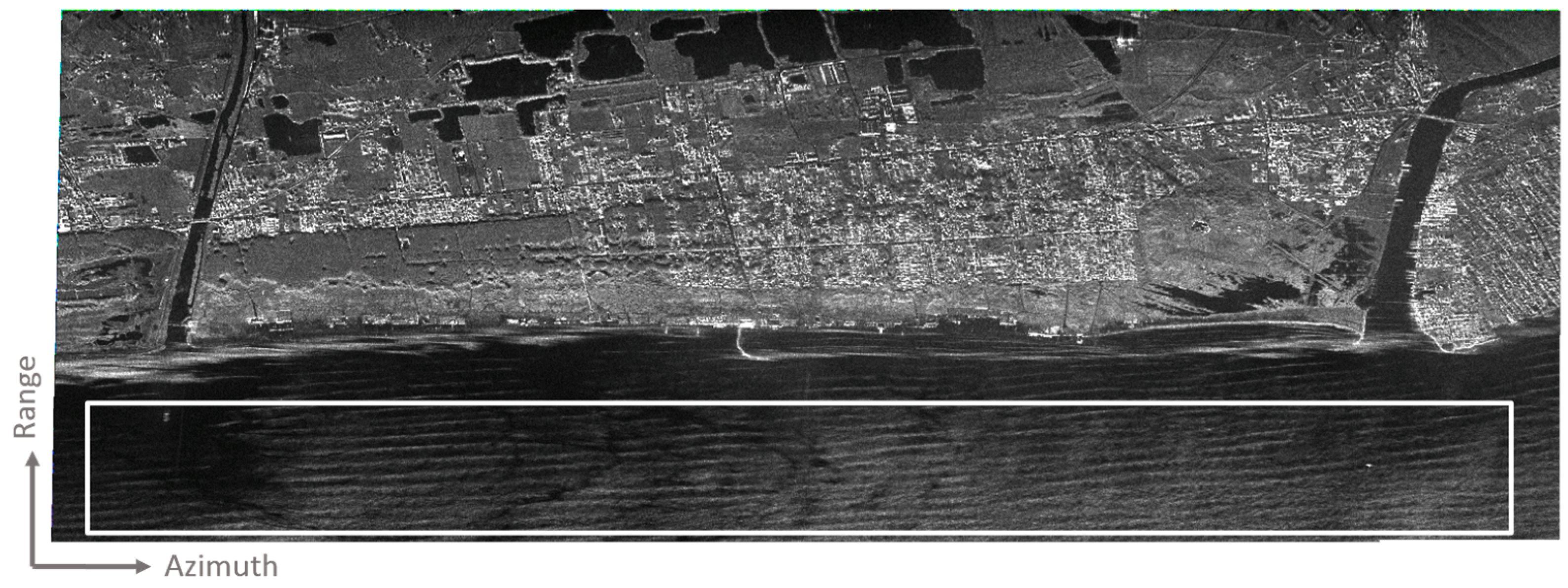
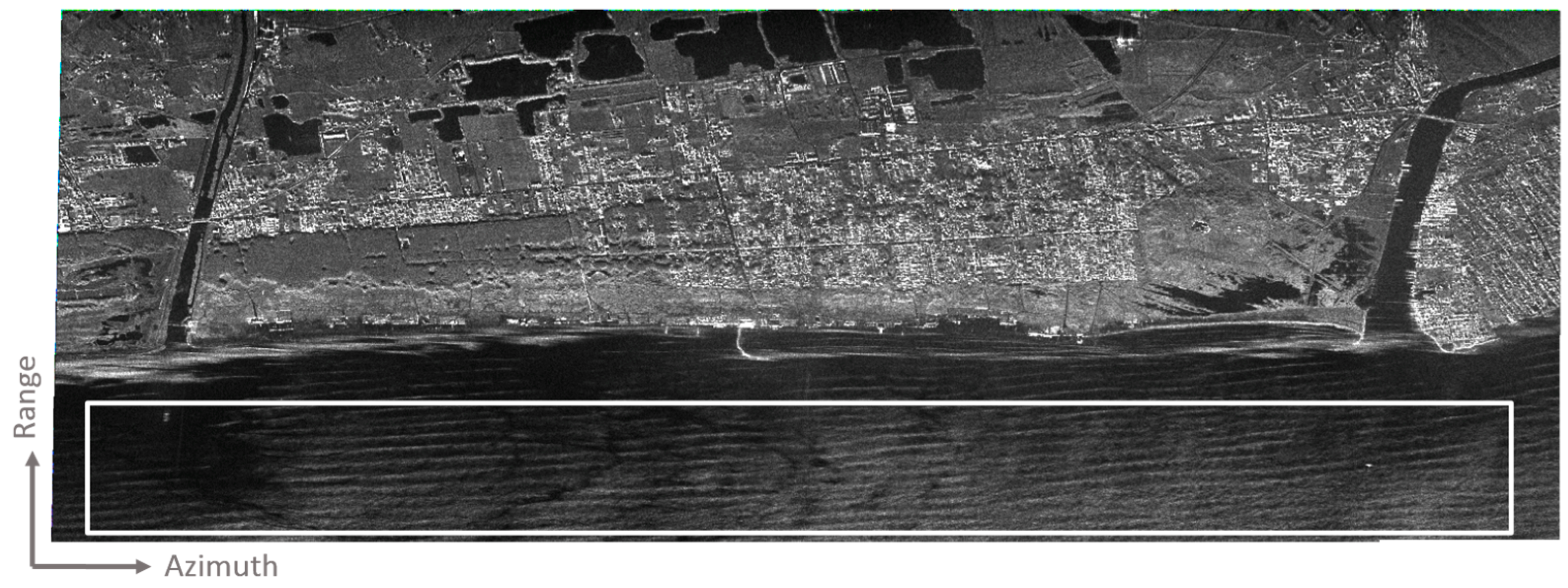
Figure 2 shows one of the three focused multi-look SAR images, where a 4 × 32 (range × azimuth) pixel averaging (leading to a resolution of 6 m in slant range and 5 m in azimuth) has been applied. As can be seen, the test area, which is about 7 km long and almost parallel to the coastline, includes both sea and land regions.
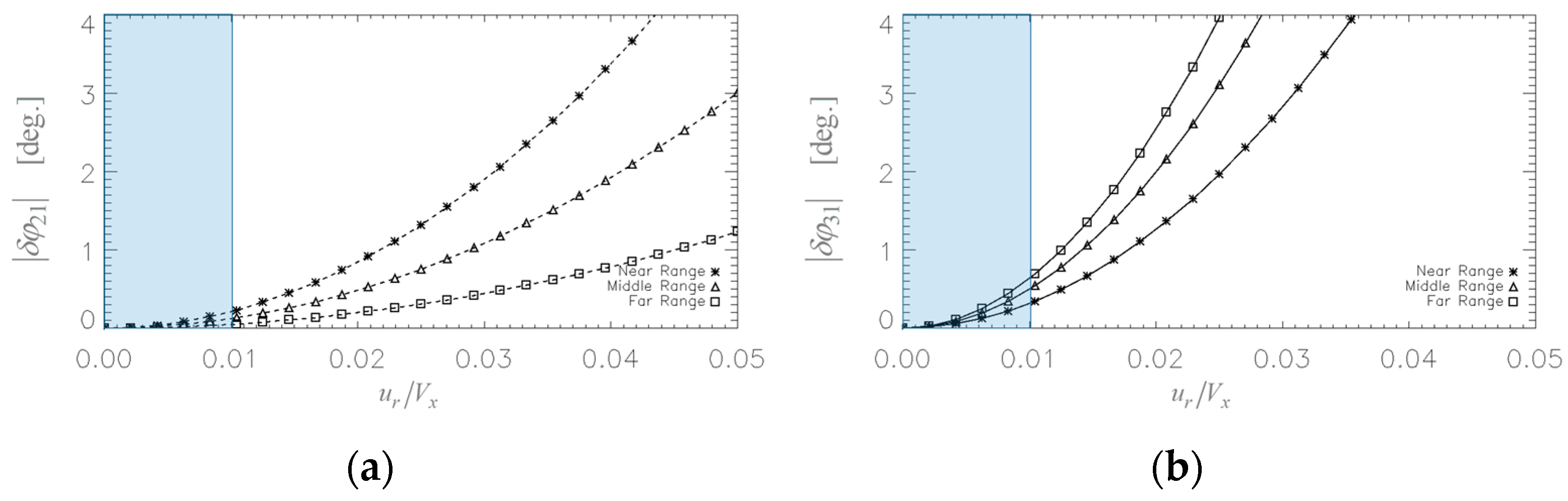
In order to solve the linear system in Equation (4), in this paper, we focus on the interferograms ∆
ϕ21 and ∆
ϕ31, where reference to
Figure 1 has been done to denote the channels’ (antennas’) numbers. It is noted that one data pair (∆
ϕ21) is characterized by the longest AT baseline component (which is coupled to the shortest XT baseline component) of the InSAR configuration of the system. The other data pair (∆
ϕ31), instead, is characterized by the longest XT baseline component (which is coupled to the intermediate AT baseline component).
Along the lines shown in
Section 3, as first step we have calculated the coefficients of the matrix
M in Equation (4). In this regard,
Figure 3a shows, for both data pairs, the corresponding AT baseline components as a function of the azimuth coordinates. From the reported plots, by considering the operating velocity of the Learjet 35A during the mission (see
Table 3), we obtain mean unambiguous velocity values [
11,
12] equal to 11.5 m/s for the data pair 1–3 and 7.1 m/s for the data pair 1–2.
Figure 3b shows, again for both data pairs, the corresponding orthogonal baselines as a function of the range coordinate. In this regard, it is recalled that the orthogonal baseline depends on both range and azimuth. In our case, however, the topographic profile of the illuminated area is quite smooth, thus leading to a very limited variation of the look angle along the azimuth direction. On the other side, as always happens in airborne acquisitions, the look angle shows a very large variation from near to far range (see
Table 3). Therefore, the azimuth variations of the orthogonal baseline are negligible with respect to the range ones. In any case, in
Figure 3b, for each range coordinate, we have reported the mean value of the orthogonal baseline respect to the azimuth samples. From the reported plots, by considering the flight parameters of
Table 3, we obtain a height of ambiguity [
1] value that ranges from 58 m to 180 m in the data pair 1–3, and from 121 m to 300 m for the data pair 1–2.
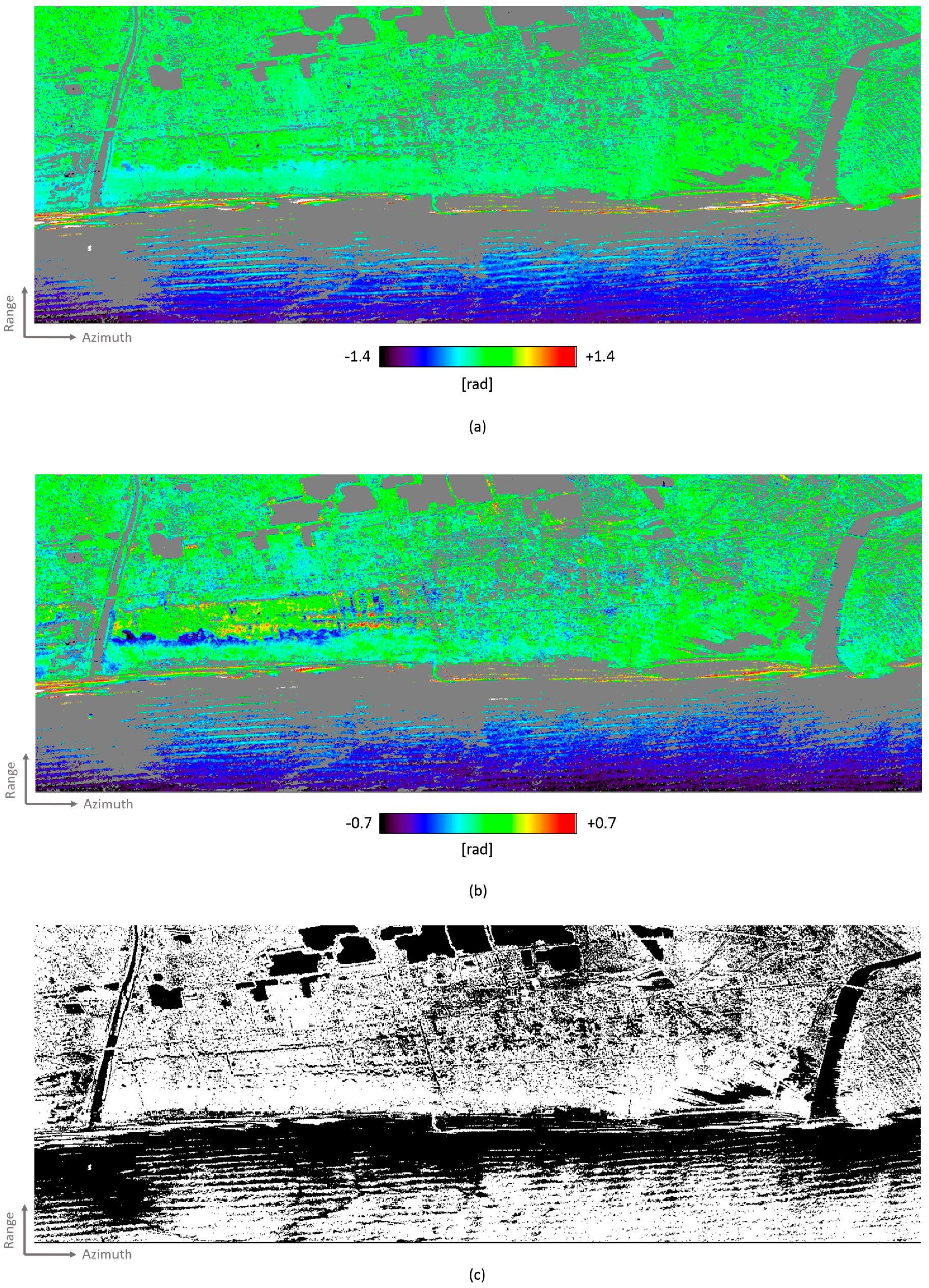
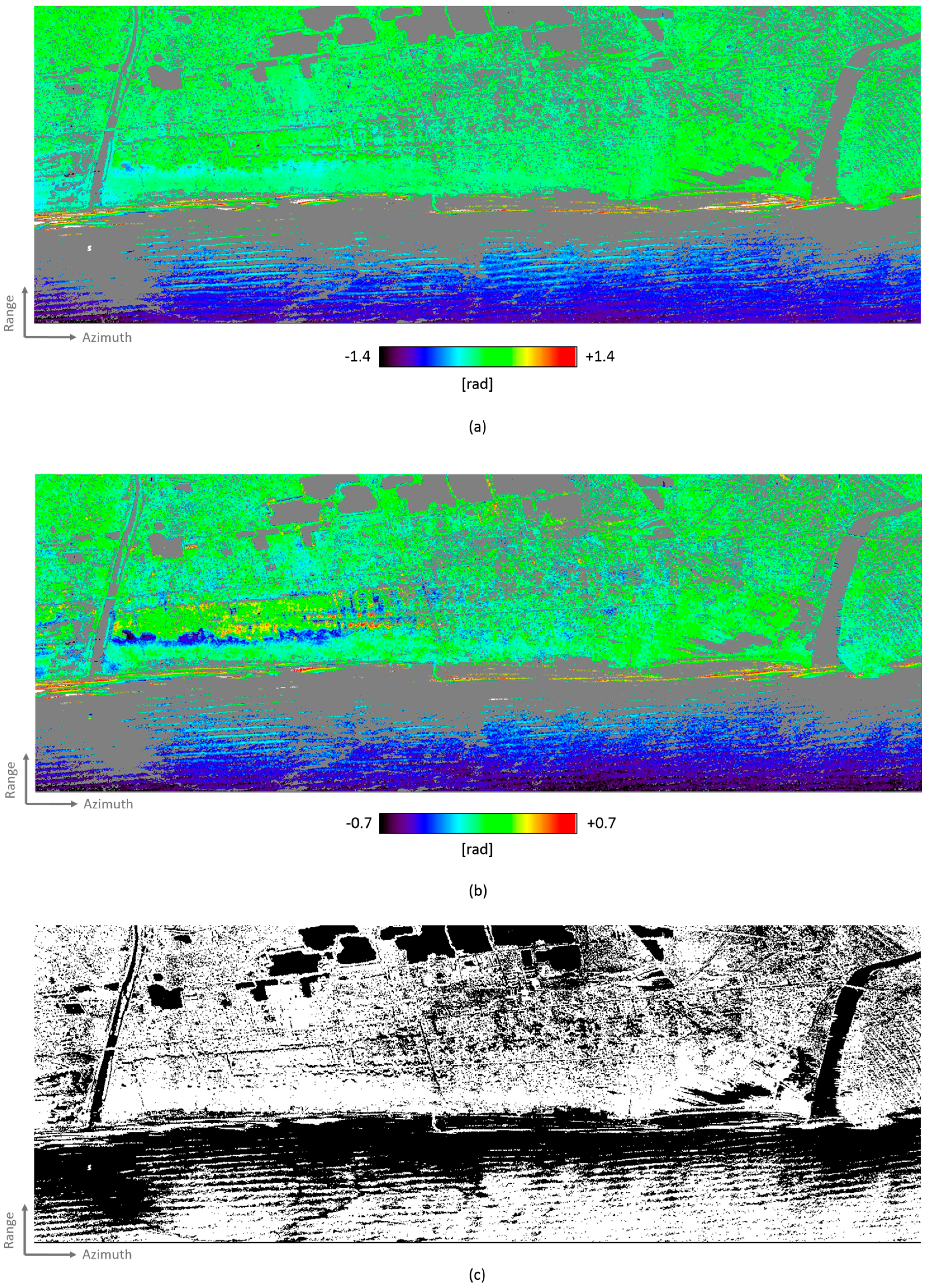
Figure 4a,b shows the two interferograms ∆
ϕ21 and ∆
ϕ31. It is highlighted that, in the shown figures, we have considered the same multi-look factors as
Figure 2 (leading to a resolution of 6 m in slant range and 5 m in azimuth); however, the inversion in Equation (4) has been carried out on higher resolution data (with resolution equal to 1.5 m in slant range and 0.6 m in azimuth). Moreover, as explained in
Section 3, both interferograms have been flattened and unwrapped [
1].
In particular, the former operation has been carried out by exploiting the SRTM DEM [
22]. Such DEM has been used also to carry out the motion compensation procedure during the SAR focusing step [
21], and to estimate and remove the unknown phase offset value affecting the interferograms after the application of the unwrapping procedure [
26]. Note that in both figures we have masked (with the gray color) the pixels whose InSAR coherence [
1] value is smaller than 0.7 at least in one of the two interferograms. The adopted coherence mask is shown in
Figure 4c. It can be observed that, in both interferograms, wide areas of the considered sea region exhibit high coherence along the whole sea wave profiles (that is, from the crests to the troughs).
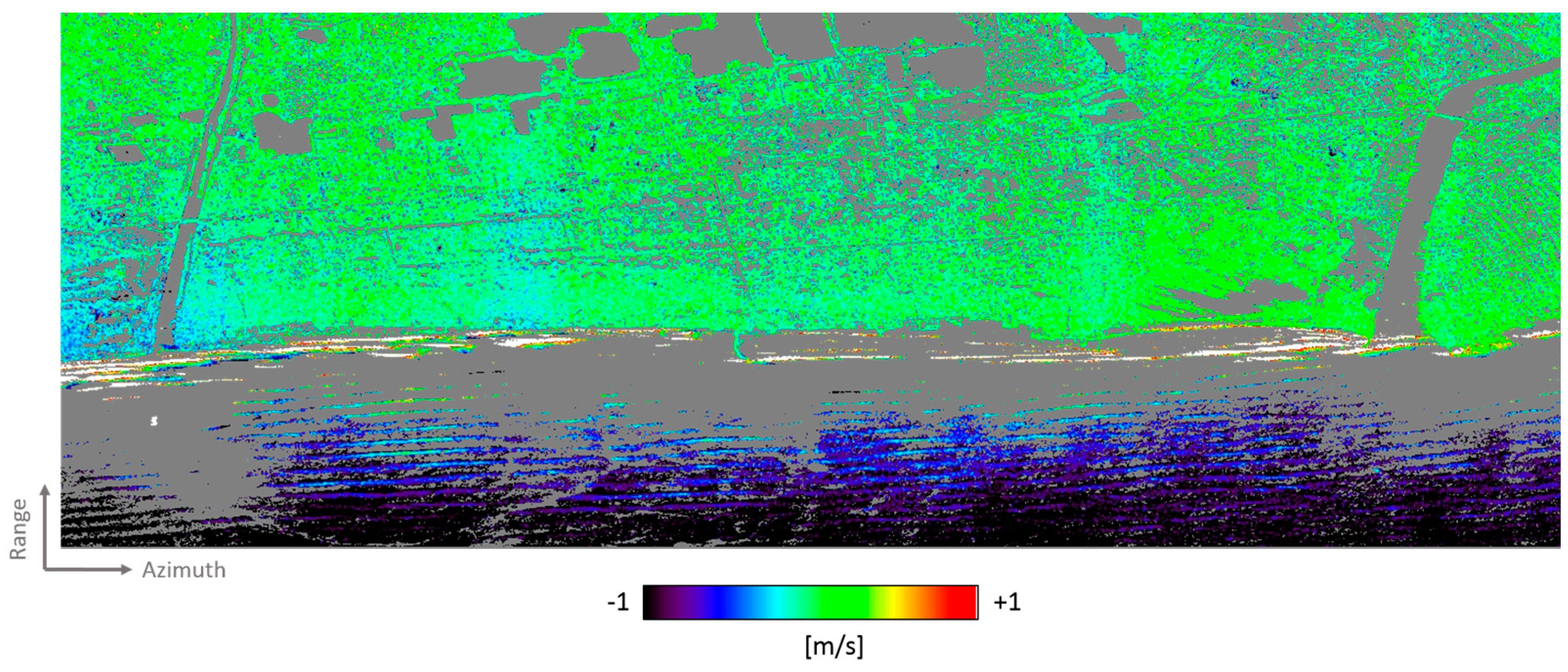
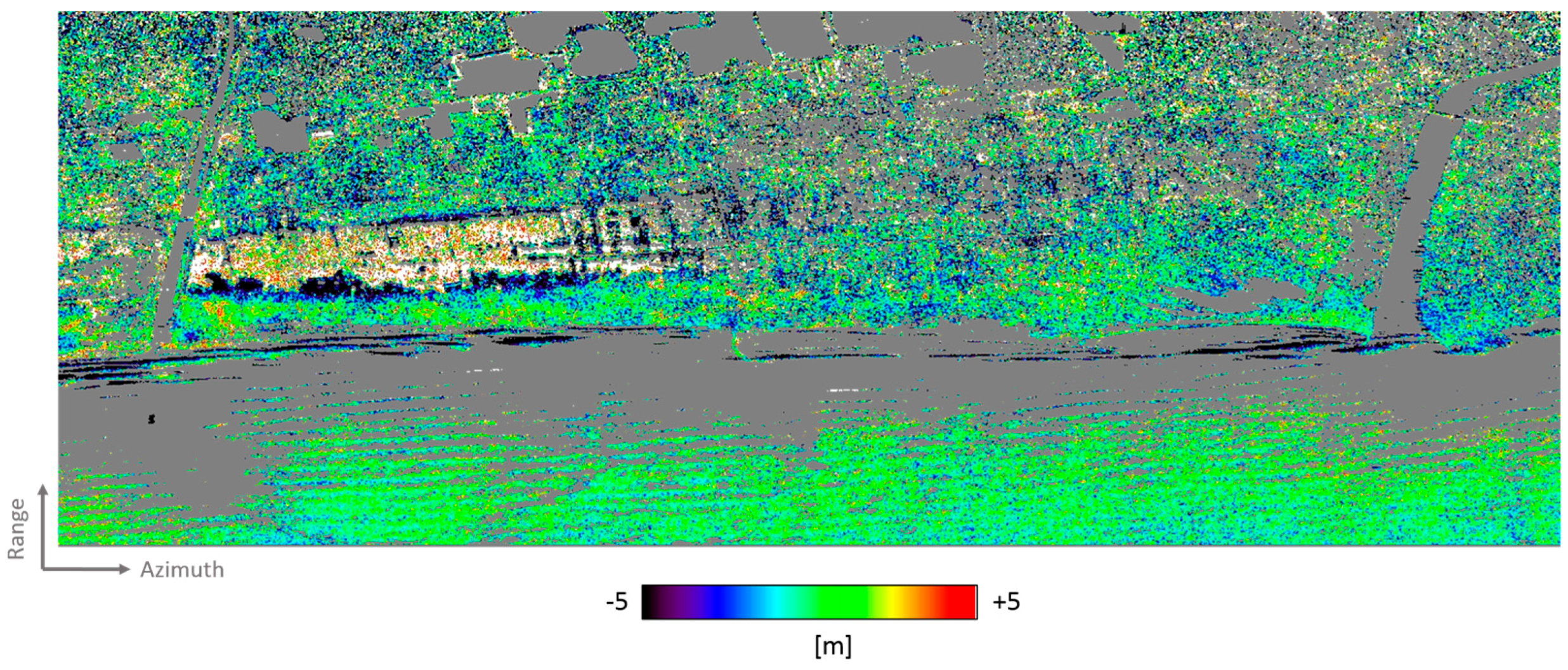
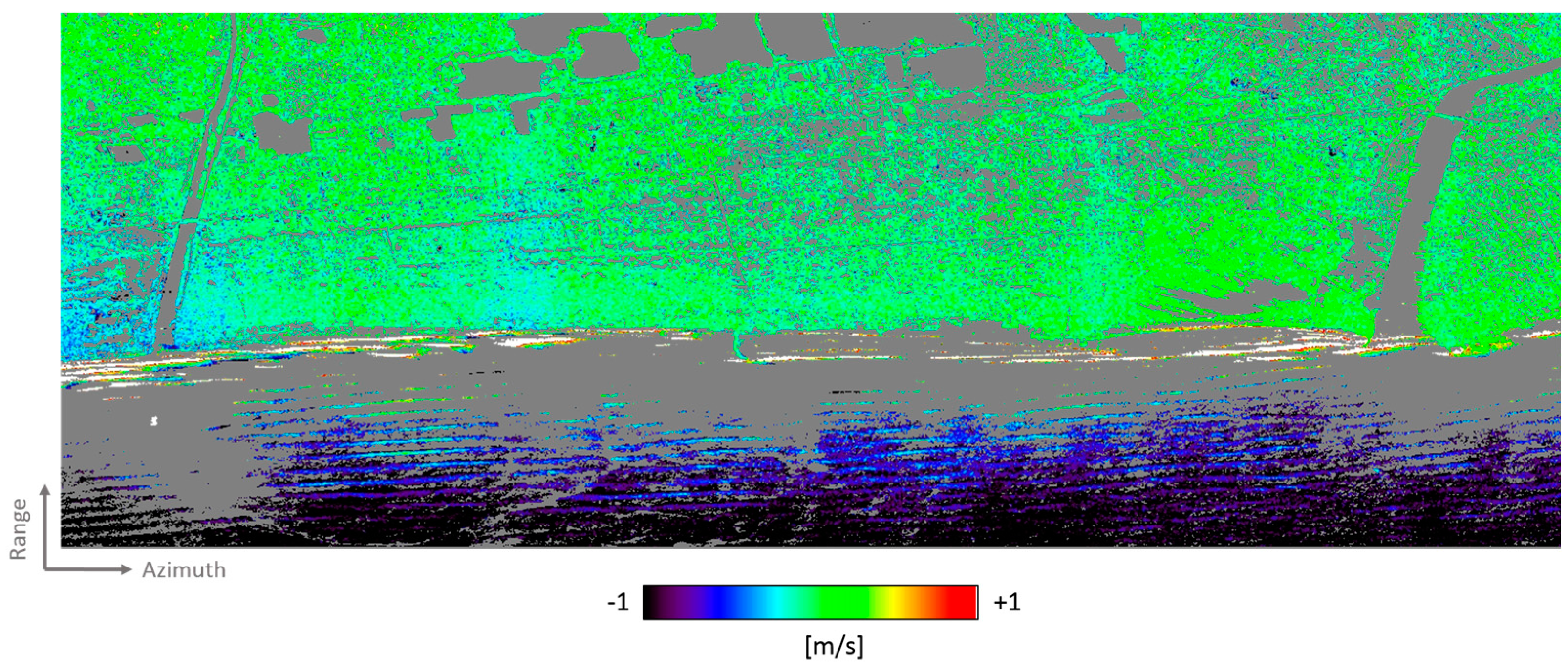
By inverting the system in Equation (4), we have obtained the surface height (
) and velocity (
) maps reported in
Figure 5 and
Figure 6, respectively. In both maps, we have masked the pixels whose interferometric coherence value is smaller than 0.7 at least in one of the two interferograms of
Figure 4. Moreover, the maps, which have been obtained at 1.5 m (range) × 0.6 m (azimuth) resolution, are shown in the figure at the same resolution as that of the data reported in
Figure 2 and
Figure 4.
Although precise information on the ground truth provided by buoys or similar instruments is not available, the obtained results show some interesting evidence of the effectiveness of the presented procedure.
First, in
Figure 6, we can see that the estimated radial velocity
turns out to be approximately zero in correspondence of the land region. This of course represents a good first order check of the effectiveness of the proposed procedure in separating the XT and AT contributions occurring in the interferograms generated through the considered three-antenna hybrid XT/AT InSAR system.
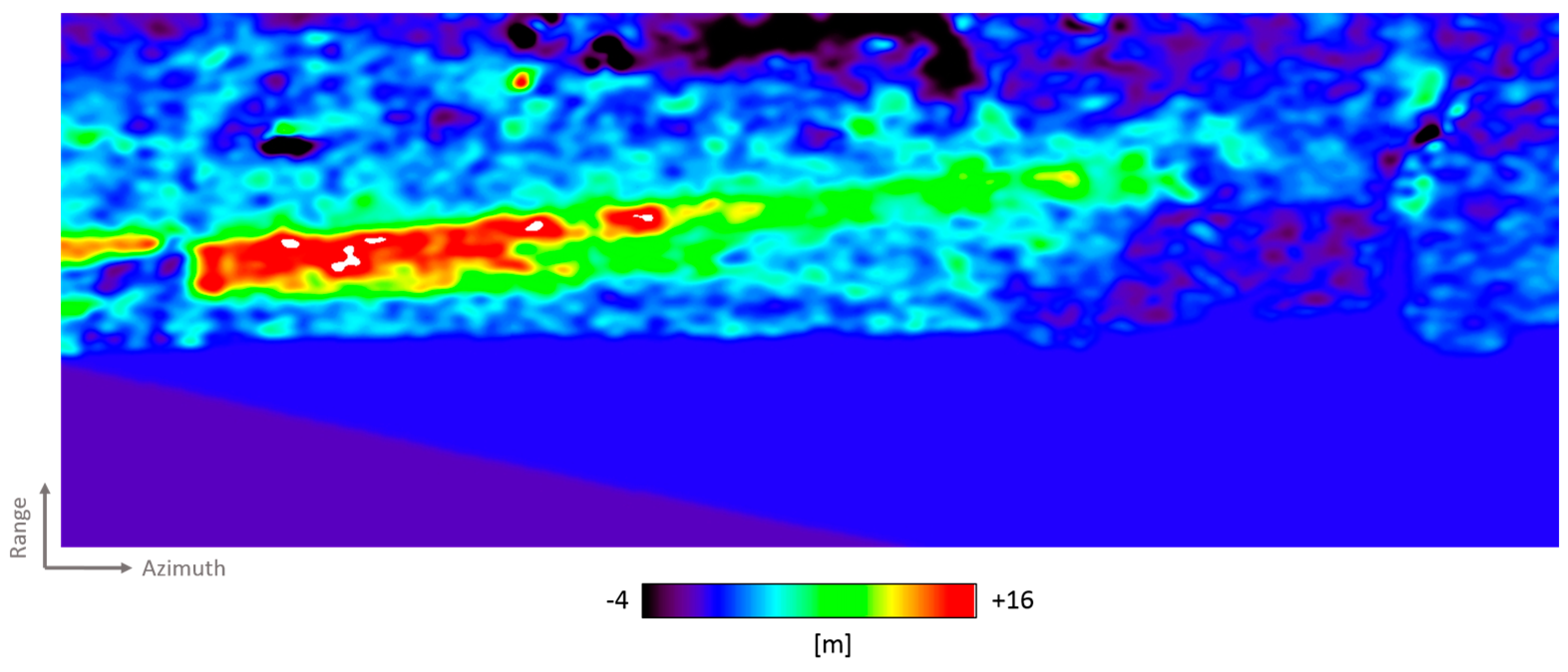
Turning to the estimated surface height map
shown in
Figure 5, we stress once again that it represents the difference between the vertical height provided by the SRTM DEM (which has been used to flatten our interferograms) and that achieved with our InSAR configuration. In particular, over the land region, the topographic map of
Figure 5 highlights the difference between the vertical accuracy of the SRTM DEM and the DEM achievable with the InSAeS4 system, whose topographic mapping capabilities have been previously discussed in [
19]. Over the sea region, instead, the topographic map of
Figure 5 represents the height of the illuminated sea surface, since over such region the topographic height provided by SRTM is constant and equal to zero. In this regard, it is stressed that
must not be confused with the true wave height (which is instead related to the difference between the crests and the troughs).
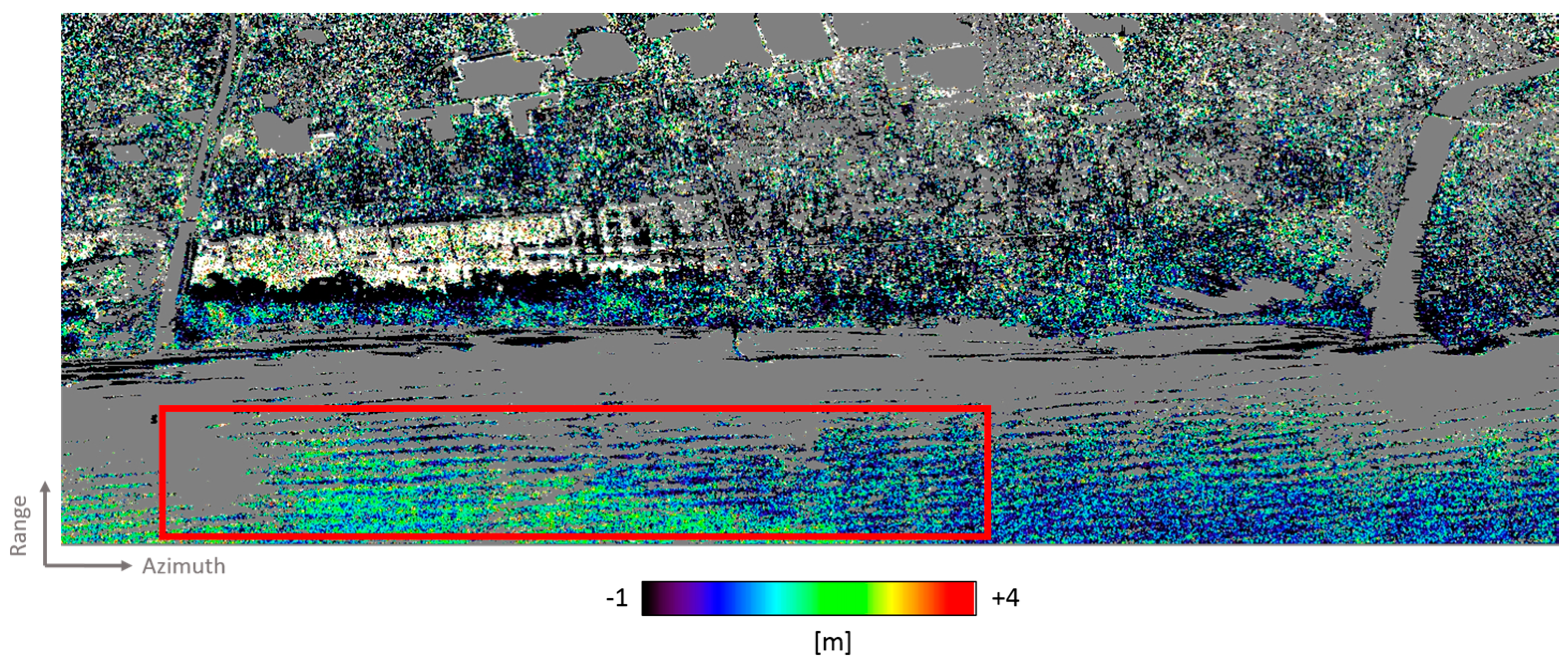
To provide a better insight on the effectiveness of the proposed approach in estimating the vertical profile of the illuminated sea waves, we have carried the following experiment. First, we have deliberately introduced a vertical bias of 1 m in the SRTM DEM in correspondence of a small portion of the illuminated sea area. The so obtained vertical profile, which is shown in
Figure 7 in radar coordinates, has been then exploited to flatten our interferograms. Finally, we have applied the procedure of
Section 3 to the so achieved interferograms. By doing so, we have obtained the surface height map
shown in
Figure 8.
As can be seen, the 1 m step on the bottom-left corner of
Figure 7 can be appreciated also in the surface height map
of
Figure 8. To quantify this effect, within the obtained
map we have selected the rectangular region highlighted in red in
Figure 8. Within this region, we have calculated the mean value of
in the top-right triangular region (where the vertical height of the reference DEM used to flatten the interferogram is 0 m, see
Figure 7) and in the bottom-left triangular region (where the vertical height of the reference DEM used to flatten the interferogram is −1 m, see
Figure 7). The difference between the so obtained values turned out to be equal to 1.14 m: the 1 m step in
Figure 7 has been thus correctly retrieved in the map of
Figure 8. Once again, the obtained results confirm the effectiveness of the overall methodology proposed to separate the XT and the AT contributions in the interferograms generated through the considered three-antenna hybrid XT/AT InSAR system. Moreover, this experiment shows that a vertical bias induced by tides on the external DEM relevant to the sea region does not affect significantly the capability of the presented procedure in separating the XT and the AT contributions from the interferograms.
Turning back to the results of
Figure 5 and
Figure 6, to improve the estimates obtained over the sea area, a filtering procedure has been applied to the
and
maps within the Region of Interest (RoI) highlighted with the white rectangle in
Figure 2. In particular, since the considered RoI is relevant to a coastal region (see
Figure 2), where the variability of the sea depth involves a spatial inhomogeneity of the sea wave features, an adaptive filtering procedure has been exploited. More specifically, for both maps we have performed a band pass filtering driven by the local properties of the quantities to be filtered. To this aim, we have split the RoI into a number of partly overlapping patches and tailored the filters according to the spectral properties of
and
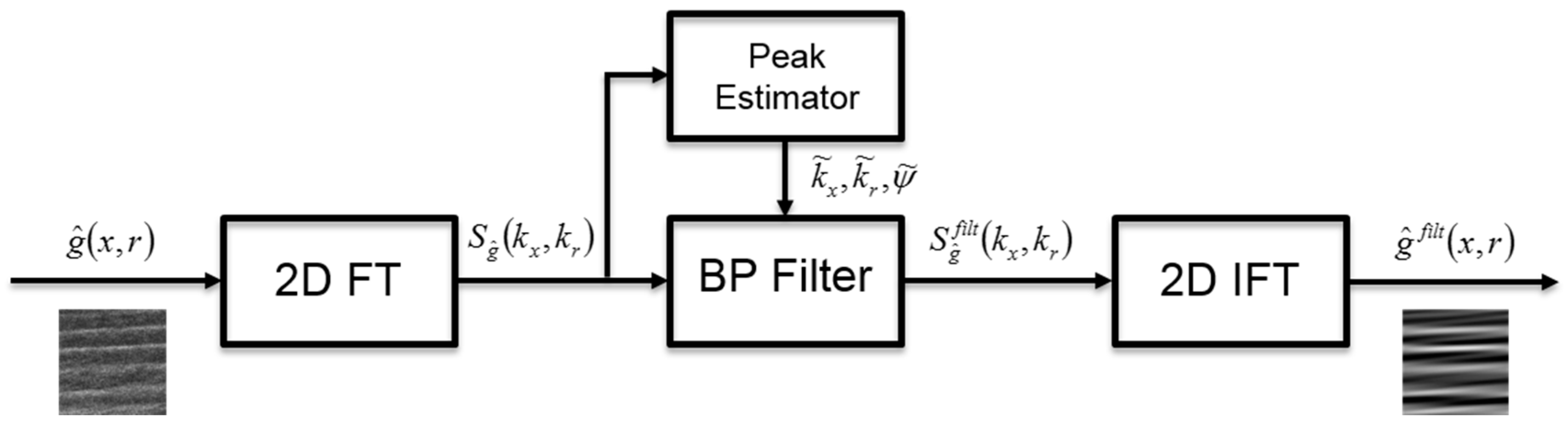
restricted to each patch. Finally, we have combined the so obtained filtered quantities by means of a mosaicking procedure. Some further considerations on the patch dimensioning and filtering are now needed.
Broadly speaking, the patch size must be large enough to allow a reliable spectral resolution but, at the same time, small enough to preserve as much as possible the space stationarity of the observed sea parameters. Moreover, enlarging the overlap between adjacent patches reduces the discontinuities of the filtered quantities at expenses of an increased computational burden of the overall procedure. According to these considerations we have set a patch size of about 384 m in range × 320 m in azimuth, with an overlap percentage of about 80% (with respect to the patch sizes). By doing so, we have covered the RoI with 1376 patches (16 along the range direction and 86 along the azimuth one).
As for the filtering procedure, for each patch we have first computed the 2D power spectra of and , say and , where kx and kr are the wavenumbers relevant to the azimuth and range directions, respectively.
Then, for each spectrum we have retrieved the dominant components, say
and
, and in turn the corresponding dominant propagation directions, say
and
, respectively. These values have been used to build two bivariate raised cosine band pass filters (whose complete expression is reported in
Appendix C) to be applied to
and
, respectively. The block diagram of the patch filtering procedure is reported in
Figure 9.
It is finally remarked that since the filtering procedure works in the spectral domain, it provides accurate results only if it can operate on coherent InSAR phases along the whole sea wave profiles (that is, from the crests to the troughs). As discussed above, in our case, this condition is well satisfied for both the exploited interferograms.
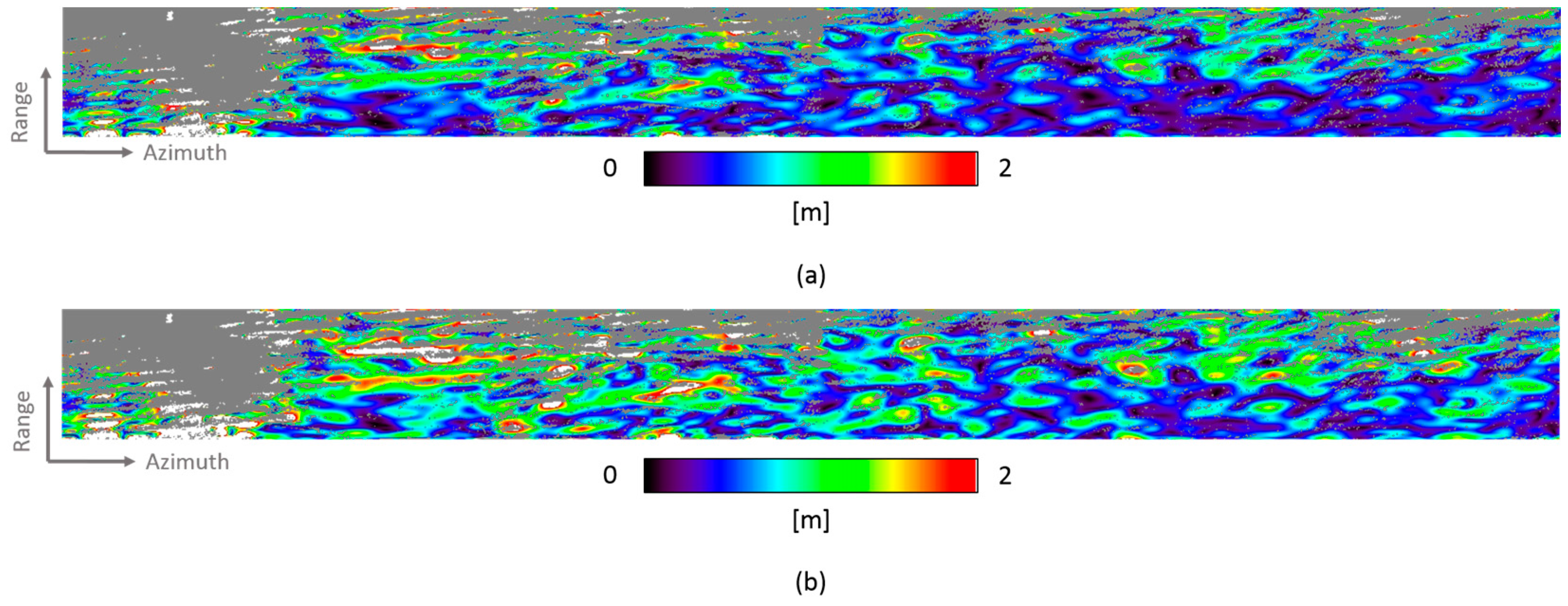
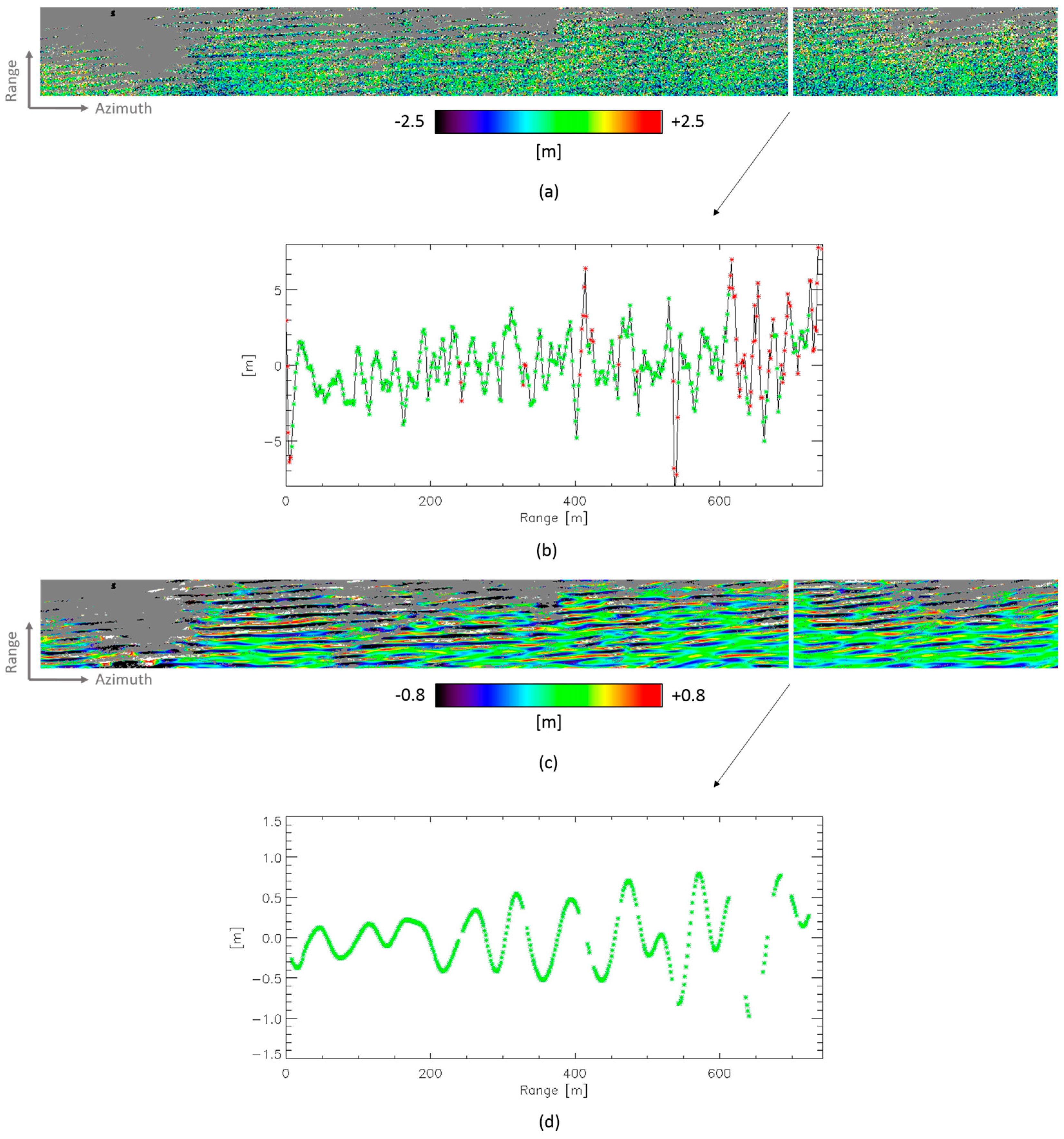
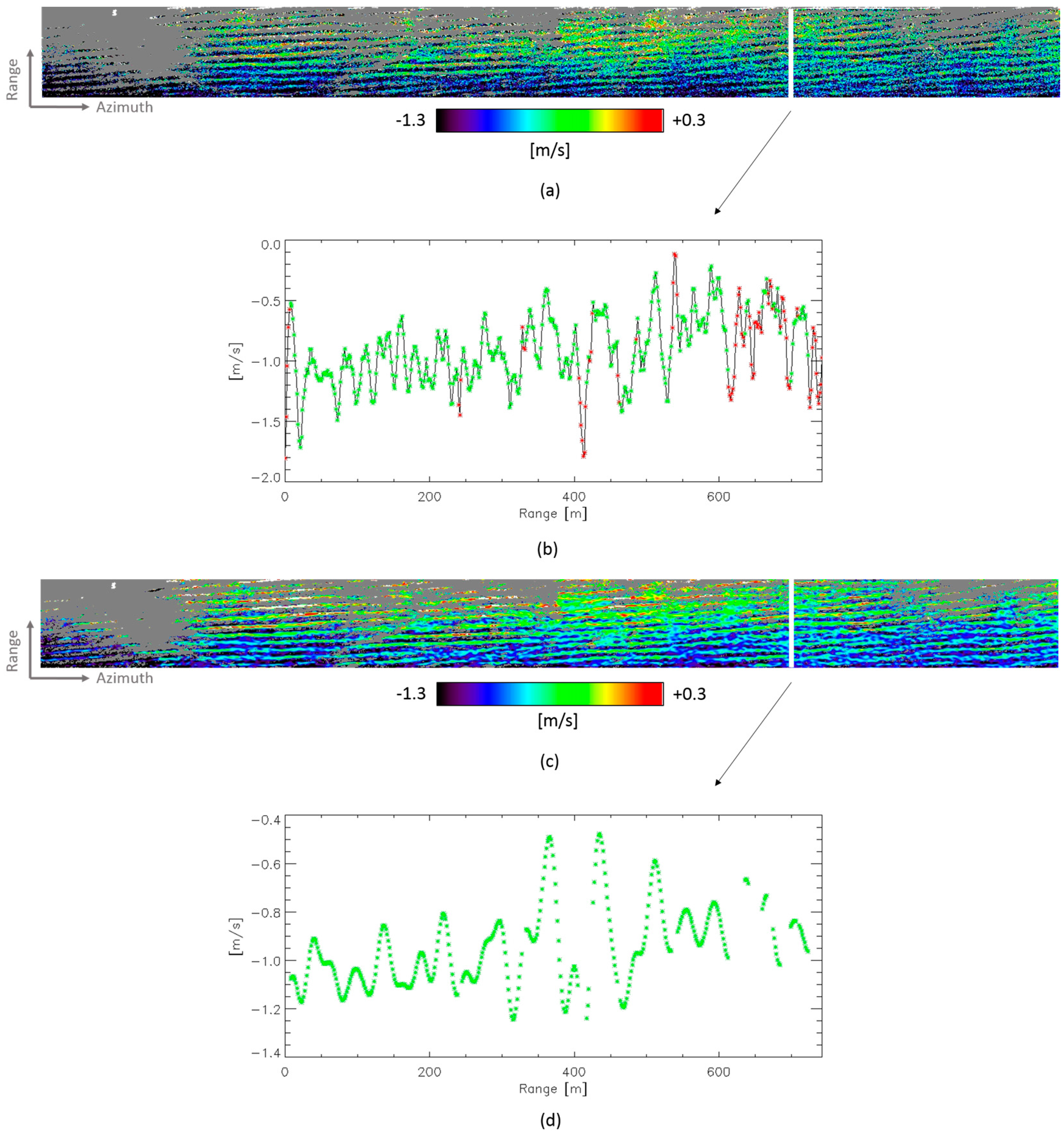
Figure 10 and
Figure 11 show the estimated sea surface height and velocity maps, respectively, before (
Figure 10a and
Figure 11a) and after (
Figure 10c and
Figure 11c) the application of the filtering procedure. In both the filtered maps, say
and
, the features of the sea waves, which move toward the coastline along a direction very close to the range one, are clearly visible. As usual, in all maps, we have superimposed the mask of
Figure 4c, that is, we have masked the pixels whose interferometric coherence value is smaller than 0.7 at least in one of the two interferograms of
Figure 4.
Let us concentrate on the sea surface height maps of
Figure 10. For both maps, we have focused on the range cut highlighted in white in
Figure 10a,c. The corresponding plots are reported in
Figure 10b,d, respectively. In particular, in
Figure 10b, we have represented with red stars the masked pixels and with green stars the high coherence ones (that is, with a coherence value greater than 0.7 in both interferograms). In
Figure 10d, instead, we show the filtered signal corresponding only to the high coherence pixels. By comparing
Figure 10b,d, we clearly understand that the applied filtering procedure operated on coherent InSAR pixels along the whole sea wave profiles (that is, from the crests to the troughs).
Moreover, in
Figure 10c, we can observe that, in proximity of the coast, the estimated sea surface height increases. This behavior is clearly shown in the cut of
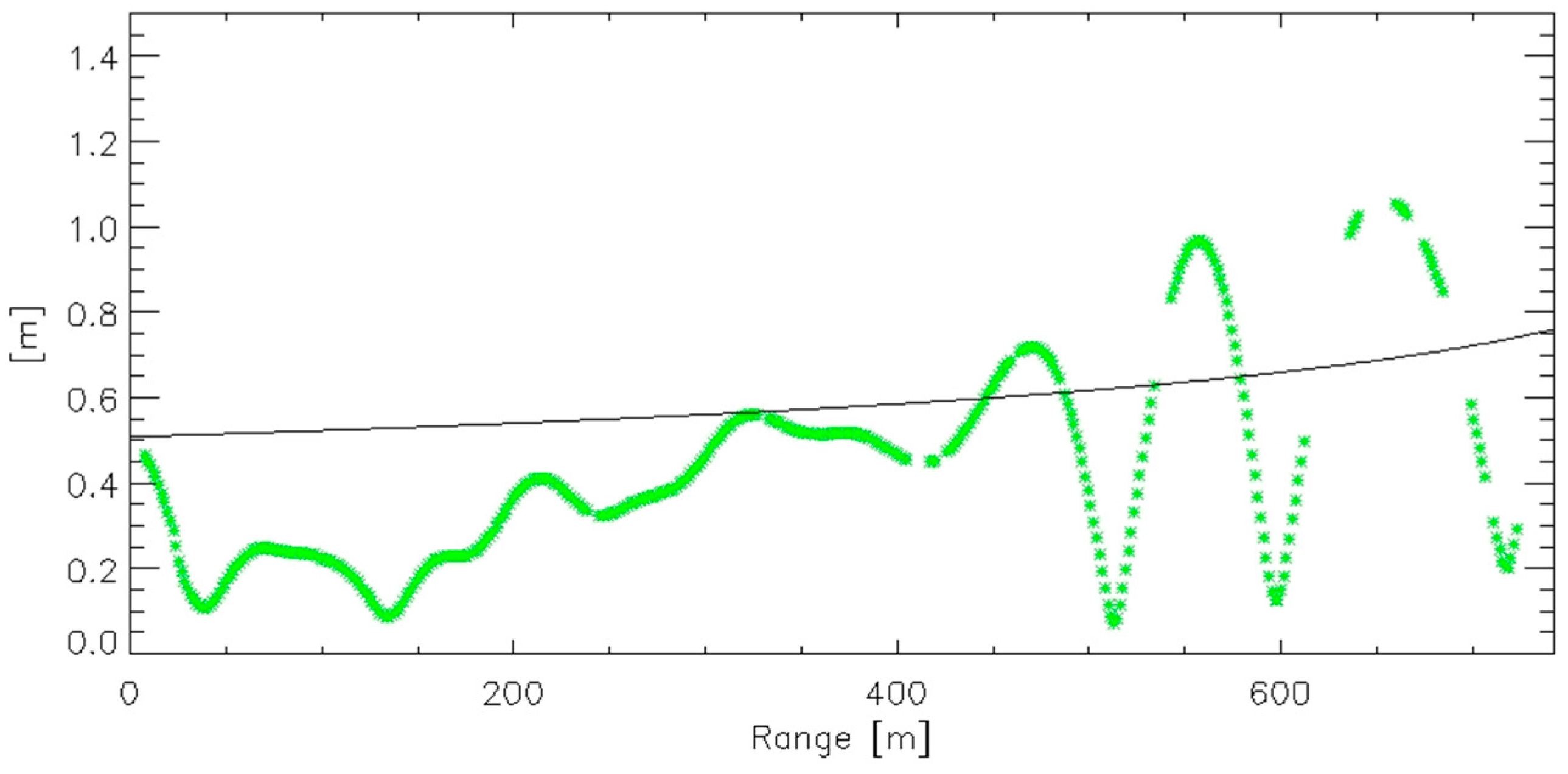
Figure 10d and it seems physically sound because of the increasing level of the sea bottom when one moves toward the coast. To better investigate this trend, we have tried to reconstruct at best, from the available (even rough) external information [
27], the sea bottom in correspondence of the ROI. In particular, we have obtained that for the quoted cuts the bathymetry varies approximately from 15 m in near range to 3 m in far range. Considering that the sea wavelength in the considered ROI is about 60 m (
Figure 10d), we can reasonably assume to be in shallow water, where sea waves shoal and increase their amplitude while they move toward the coast. To quantify this effect, we have roughly assumed a bathymetry profile linearly varying from 15 m to 3 m, from which we can get a ballpark prediction of the sea wave amplitude using the following relation [
28]:
where
rg is the ground range,
h(
·) is the bathymetry profile and
A(
·) is the sea wave amplitude, that is, the envelope of the sea surface height ∆
z. It is remarked that the relation in Equation (9) holds for shallow water waves that propagate over a slowly varying bathymetry, outside the breaking zone [
28]. It can be thus applied in our case where these conditions are well satisfied. The so obtained profile
A(
rg) has been converted in radar geometry (through the transformation
A(
rg)→
A(
r)) and then plotted in
Figure 12. In the same figure, we have then superimposed the envelope of the
cut of
Figure 10d, where we have reported only the coherent InSAR pixels (represented as usual with green stars).
As can be seen, we have obtained a quite good agreement between the sea wave amplitude retrieved from an (even rough) available bathymetry profile and the estimates provided by our procedure. This good agreement is preserved if we move from the single range cut to the whole ROI. In particular, in
Figure 13 we show the envelope of the estimated sea surface height (
Figure 13a) and its counterpart normalized to the theoretical wave amplitude obtained from the available bathymetry through the expression in Equation (9) (
Figure 13b). These figures clearly show that the increasing trend occurring in the estimated wave envelope along the range direction is well compensated after the normalization to the theoretical predicted wave amplitude.
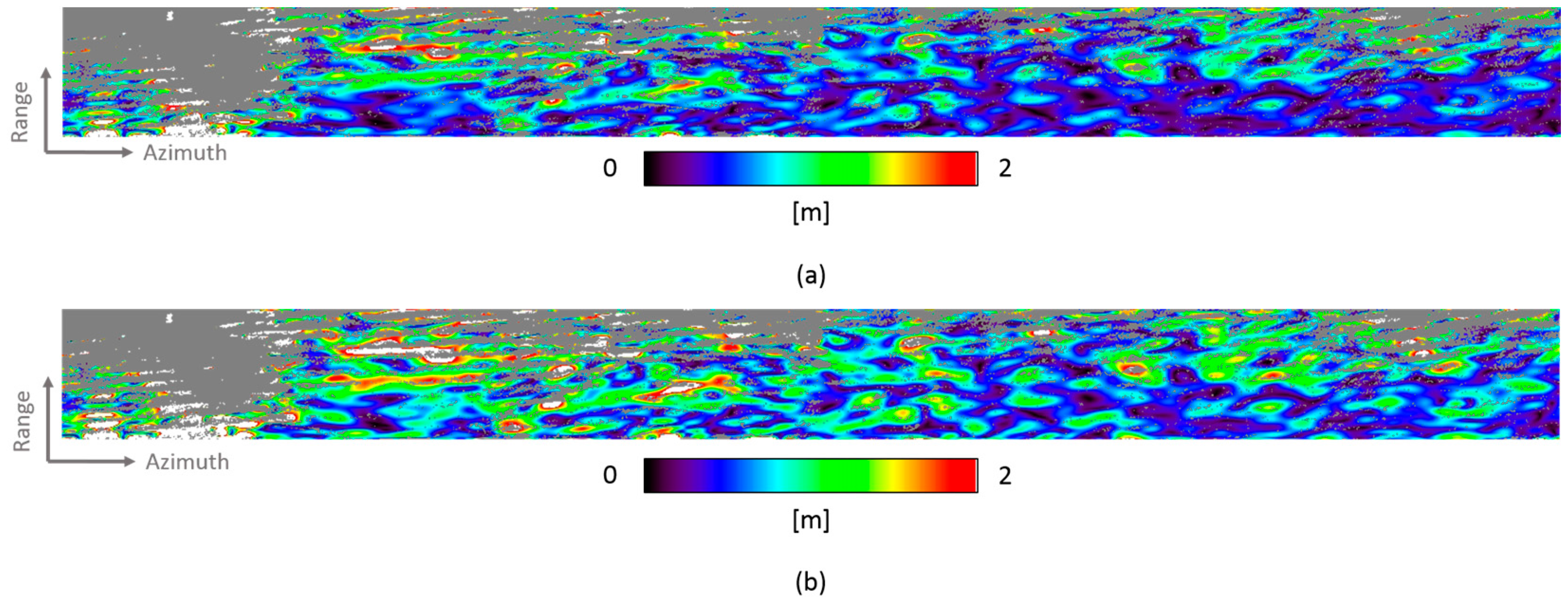
Turning to the estimated velocity, in
Figure 11c, we can observe that the mean value of the estimated sea surface velocity magnitude decreases in proximity of the coastline. This behavior is clearly shown in the plot of
Figure 11d, which is relevant to the same range cut of
Figure 10d. As above, we have reported in
Figure 11b also the corresponding cut picked up from the unfiltered map, and (as usual) we have plotted with red stars the masked (low coherence) pixels and with green stars the high coherence pixels.
A physical explanation of the decreasing trend of the estimated velocity magnitude in
Figure 11d is now in order.
We recall that the velocity measured with an AT-InSAR system is the sum of different LOS contributions: the orbital motion of water particles from the swell, the phase velocity of the Bragg waves and the currents.
In our case, the swell is certainly present, as testified by the shoaling waves visible in the SAR image of
Figure 2. Therefore, the LOS component of the orbital velocity certainly contributes to the
and
maps and in the corresponding range cuts reported in
Figure 11. In this regard, it is worth noting that the orbital velocity is expected to increase as the waves get closer to shore. Turning to the Bragg waves, their presence cannot be excluded in our case. In this regard, it is noted that within the considered ROI the incidence angle ranges approximately from 30 to 40°; accordingly, our X-Band radar is sensitive to resonant Bragg wavelengths varying from 3.1 cm (in near range) to 2.5 cm (in far range). This means that the phase velocity of the Bragg waves detectable by our radar changes from about 27 cm/s (in near range) to 25 cm/s (in far range) [
29]. Accordingly, even assuming the presence of Bragg waves, they are in any case expected to provide a very marginal contribution to the decreasing trend observed in
Figure 11d for the overall measured sea surface velocity magnitude. Summing up, in our case as the sea waves move toward the shore the orbital velocity of water particles is expected to increase, whereas the phase velocity of the Bragg waves detectable by our radar is expected to be practically constant. Accordingly, we can draw the conclusion that the decreasing trend in
Figure 11d is due to the presence of a sea surface current field. In this regard, it is worth noting that near the coast the currents may be generated by tides or by the river outlets (such as the Volturno one), and may become appreciable (more than 1 m/s, say) [
30]: they are thus compatible with the velocity values retrieved with the proposed method.
A final consideration on the maps and plots reported in
Figure 11 is necessary.
Since the LOS component of the measured sea surface velocity depends on the incidence angle, the range behavior of
and
is then somehow influenced by the variation of the incidence angle itself from the near to the far range of the considered ROI. Compensating such geometrical effect is however not a straightforward task. Indeed, in each point of the observed sea area, the orbital velocity, the phase velocity of the Bragg waves and the currents are generally three different vectors with three different amplitude and orientations. Compensation of the influence of the incidence angle in the sum of the LOS components of these three different vectors would require some information on their amplitude and orientation, which, in our case, we do not have. In this regard, it is underlined that some attempts to compensate for the geometrical effect of the incidence angle have been provided in the literature [
11,
31], but under precise conditions that, unfortunately, do not hold in our case. In particular, in [
11], it is assumed the absence of Bragg waves and swell, whereas in [
31] it is assumed the absence of swell and currents. Unfortunately, in our case these assumptions cannot be done since, as clarified above, it is likely that the swell, the sea surface currents and the Bragg waves all occur in the observed area.


 and
and 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}