
Mapping and Characterization of Hydrological Dynamics in a Coastal Marsh Using High Temporal Resolution Sentinel-1A Images

 , , ,
, , ,
Abstract
:
1. Introduction
2. Study Site and Dataset
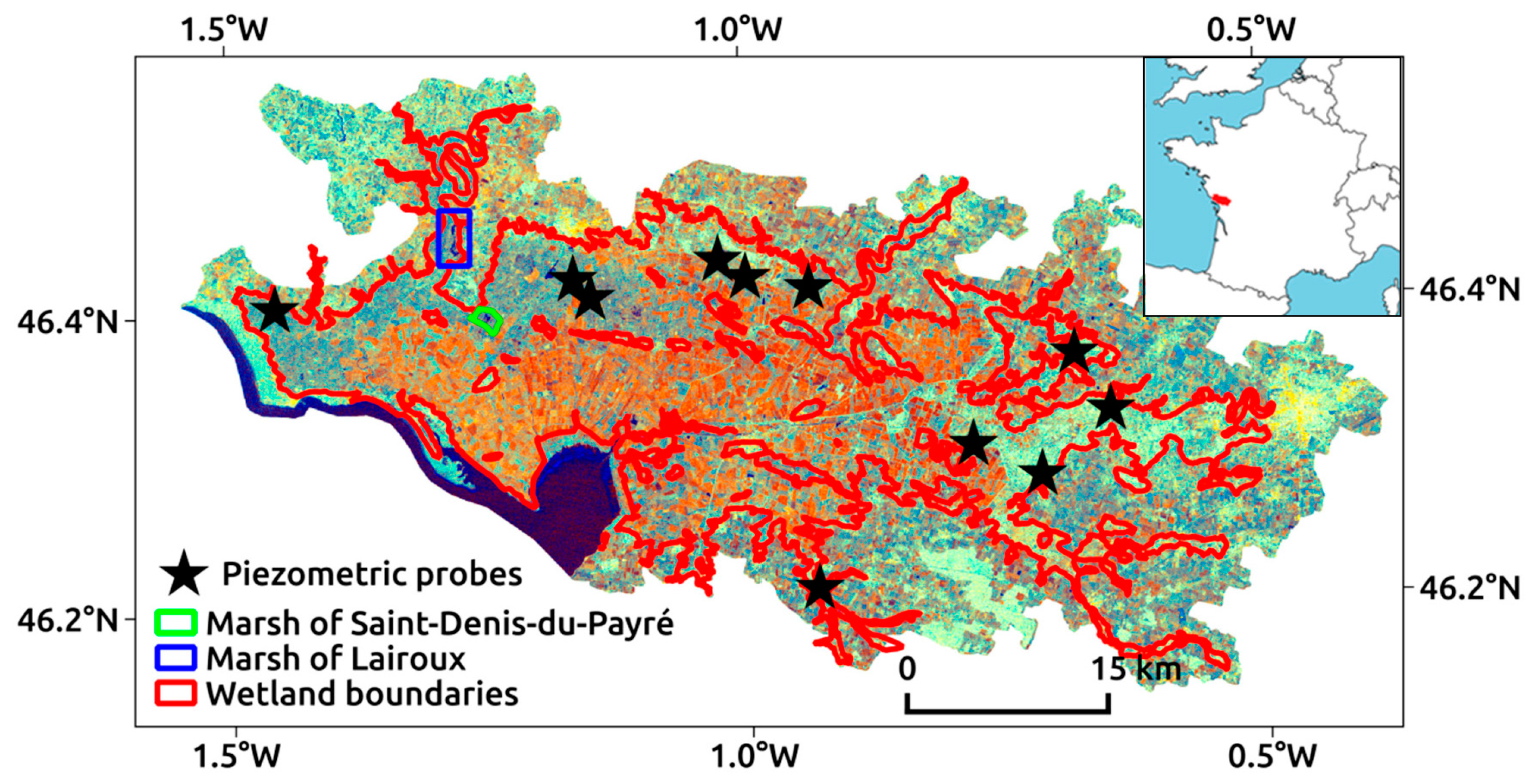
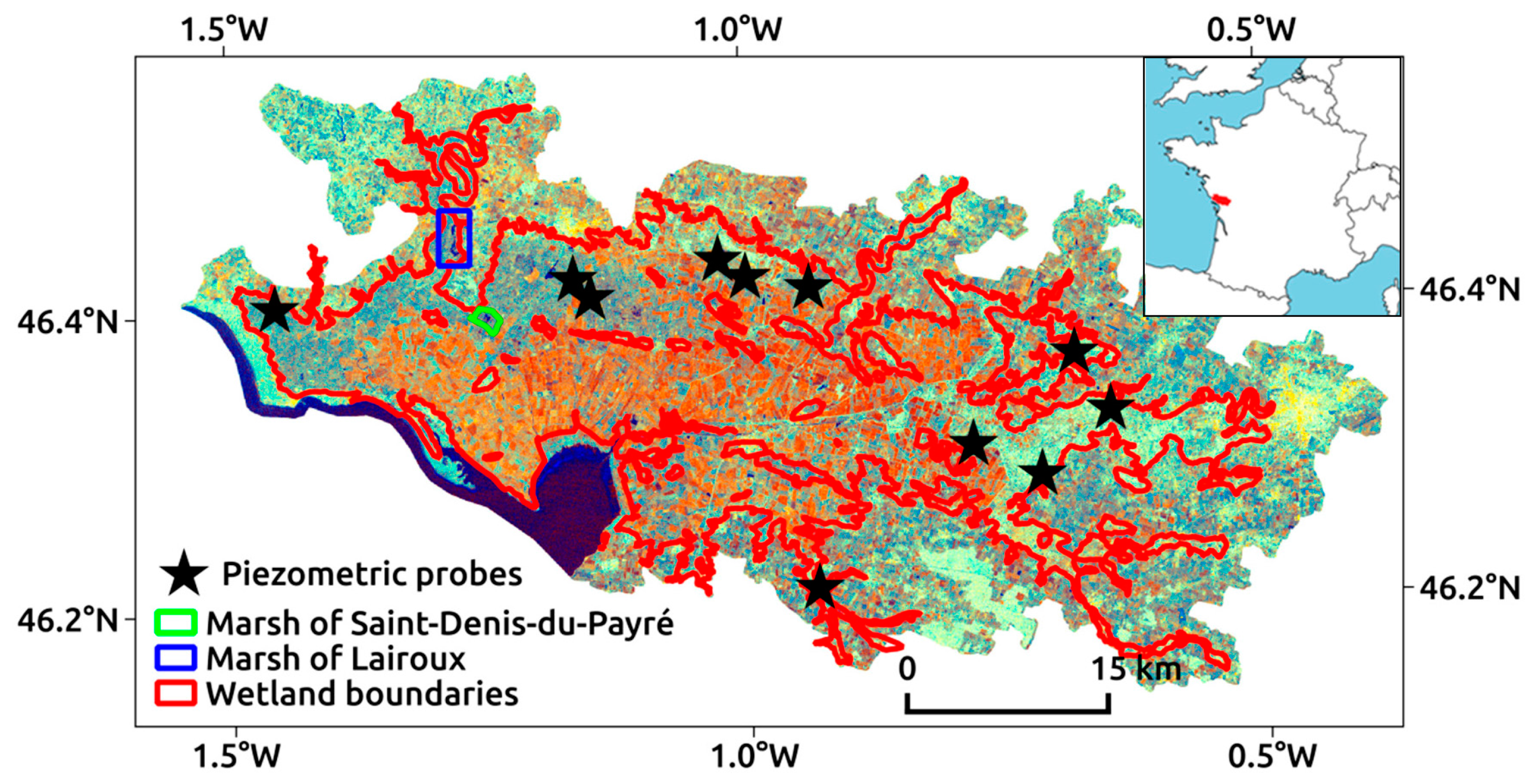
2.1. Study Site
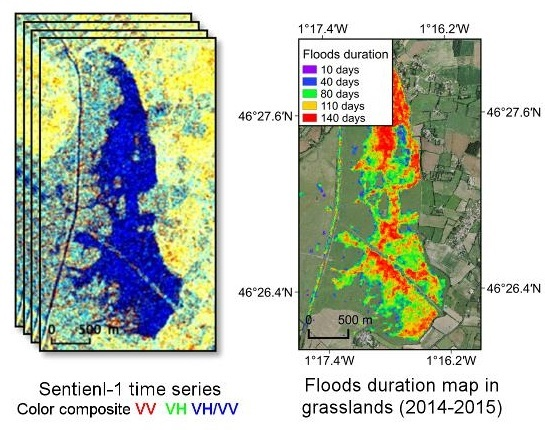
2.2. Radar Data
2.3. LiDAR-Based DTM
2.4. Piezometric Probe Data
2.5. Ancillary Data
3. Methods
3.1. Pre-Processing of Radar Data
3.2. Radar Time Series Simulation with Different Time Steps
3.3. Flood Detection
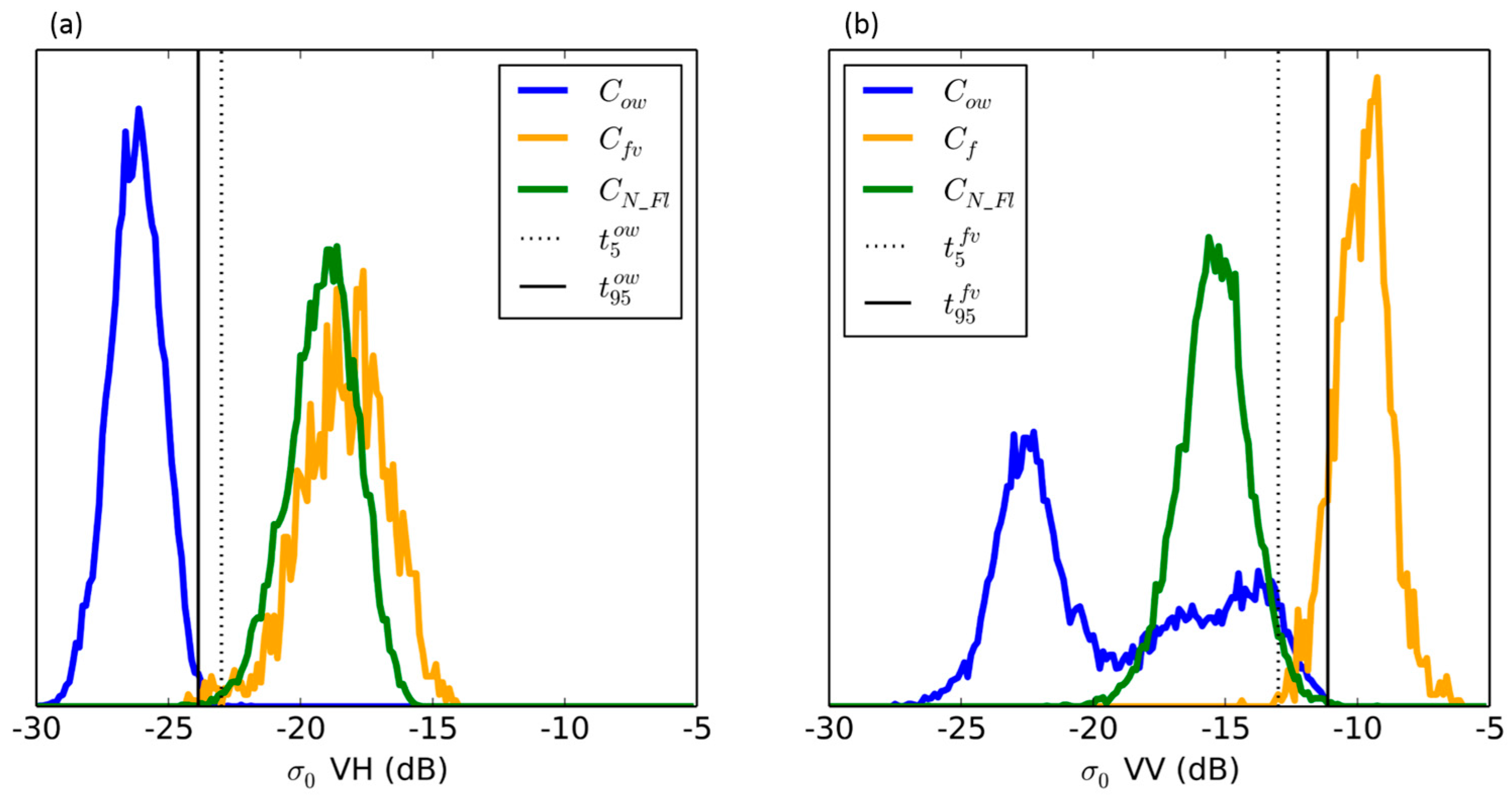
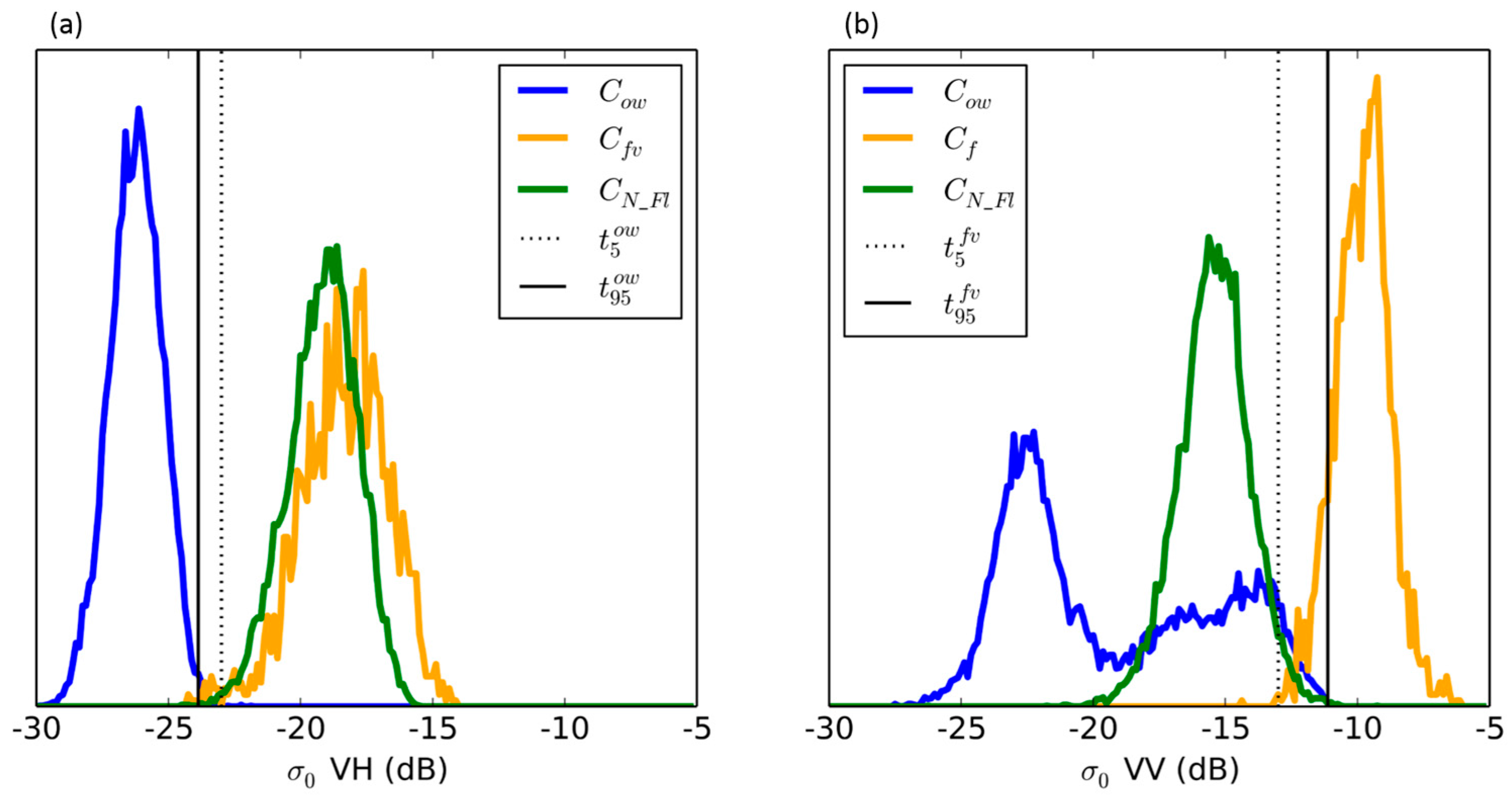
3.3.1. Estimating Threshold Values
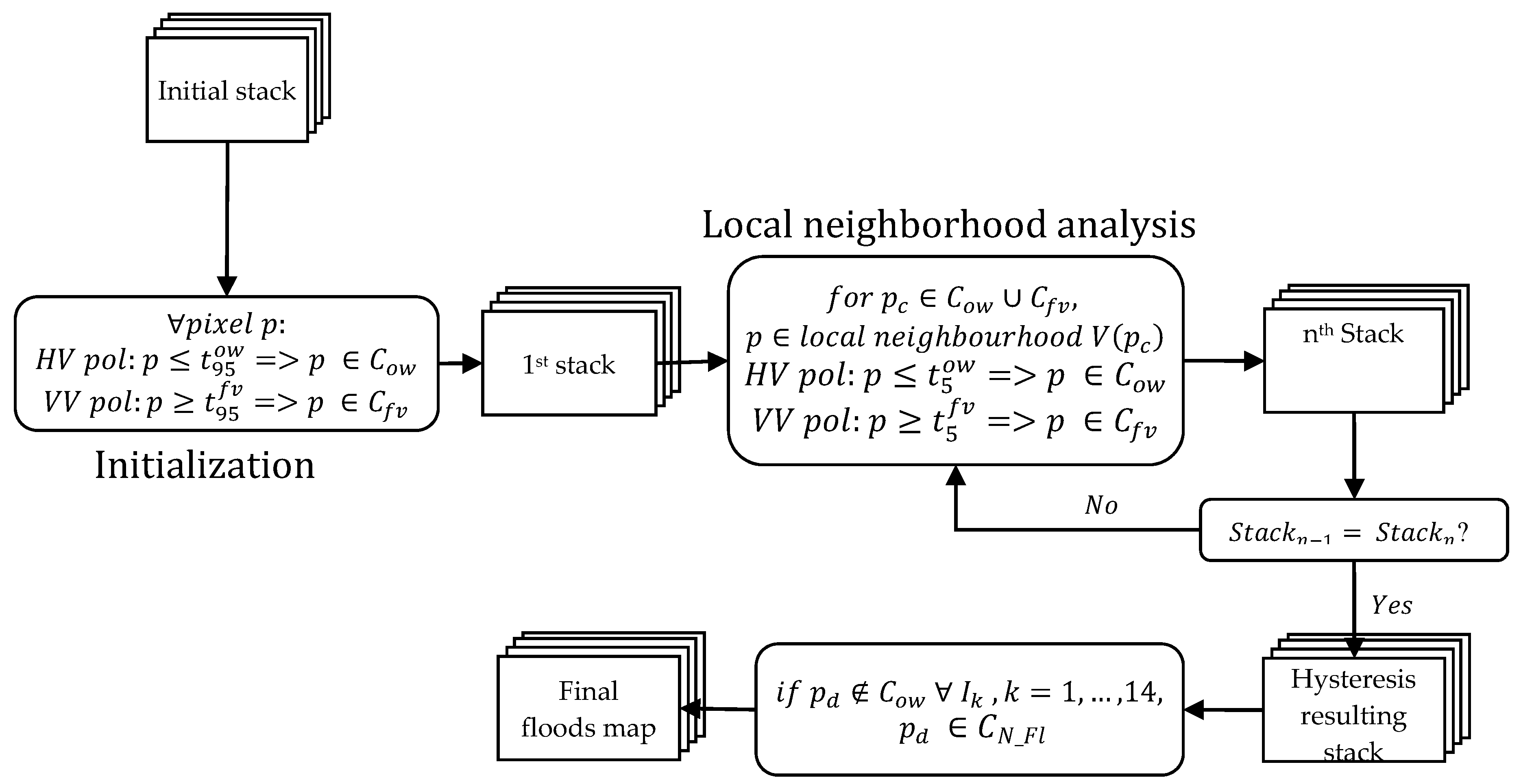
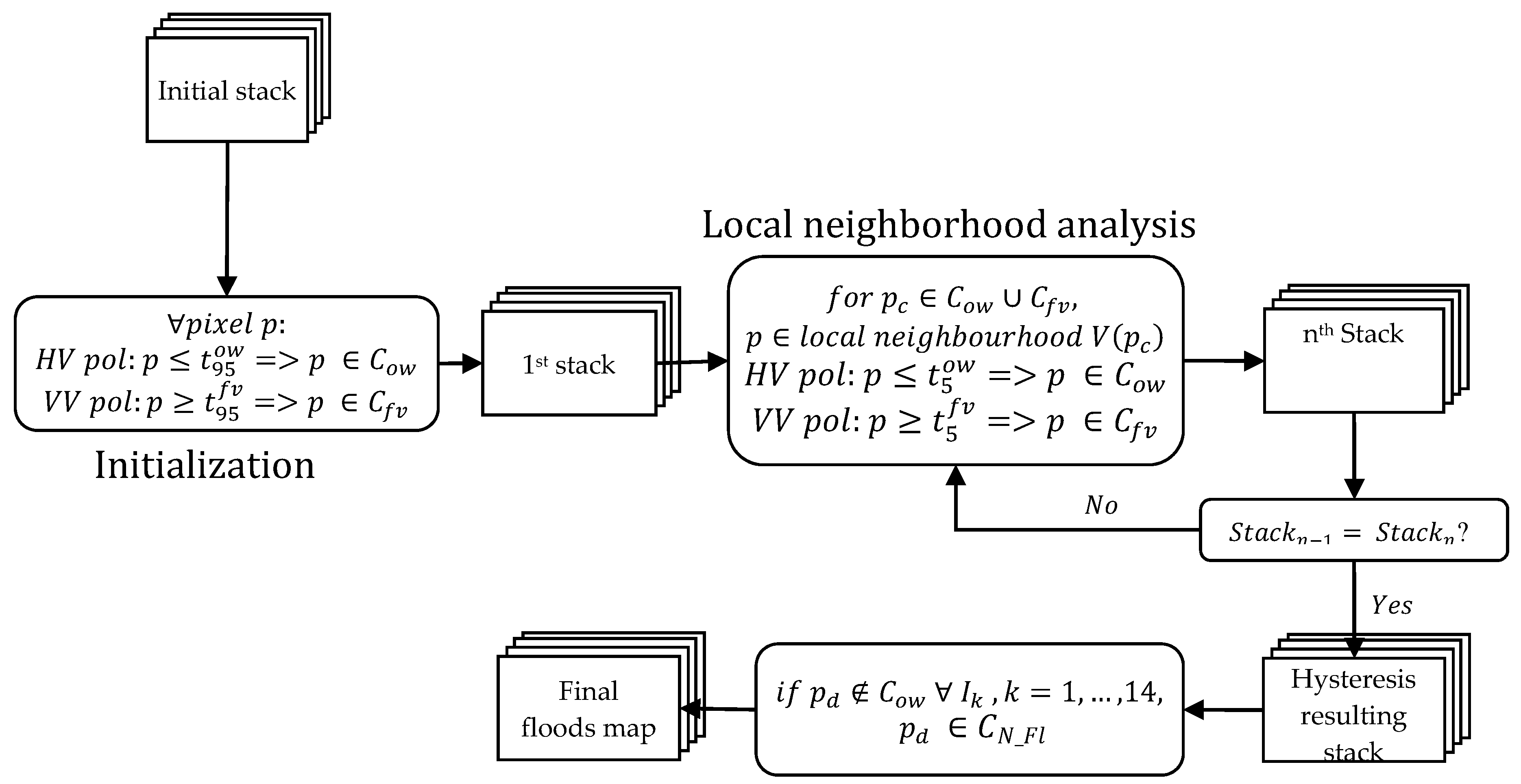
3.3.2. Iterative Hysteresis Thresholding Algorithm
3.4. Assessing Accuracy
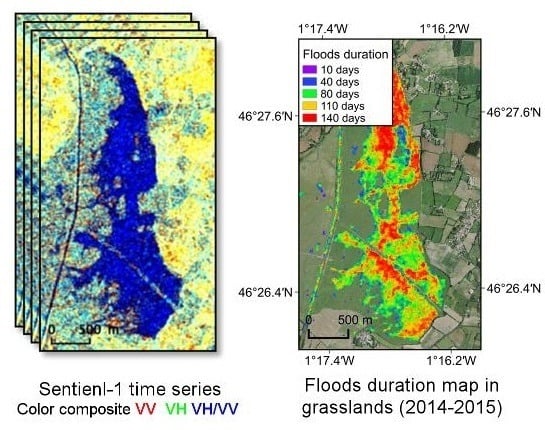
3.5. Characterization of Hydrological Dynamics
4. Results and Discussion
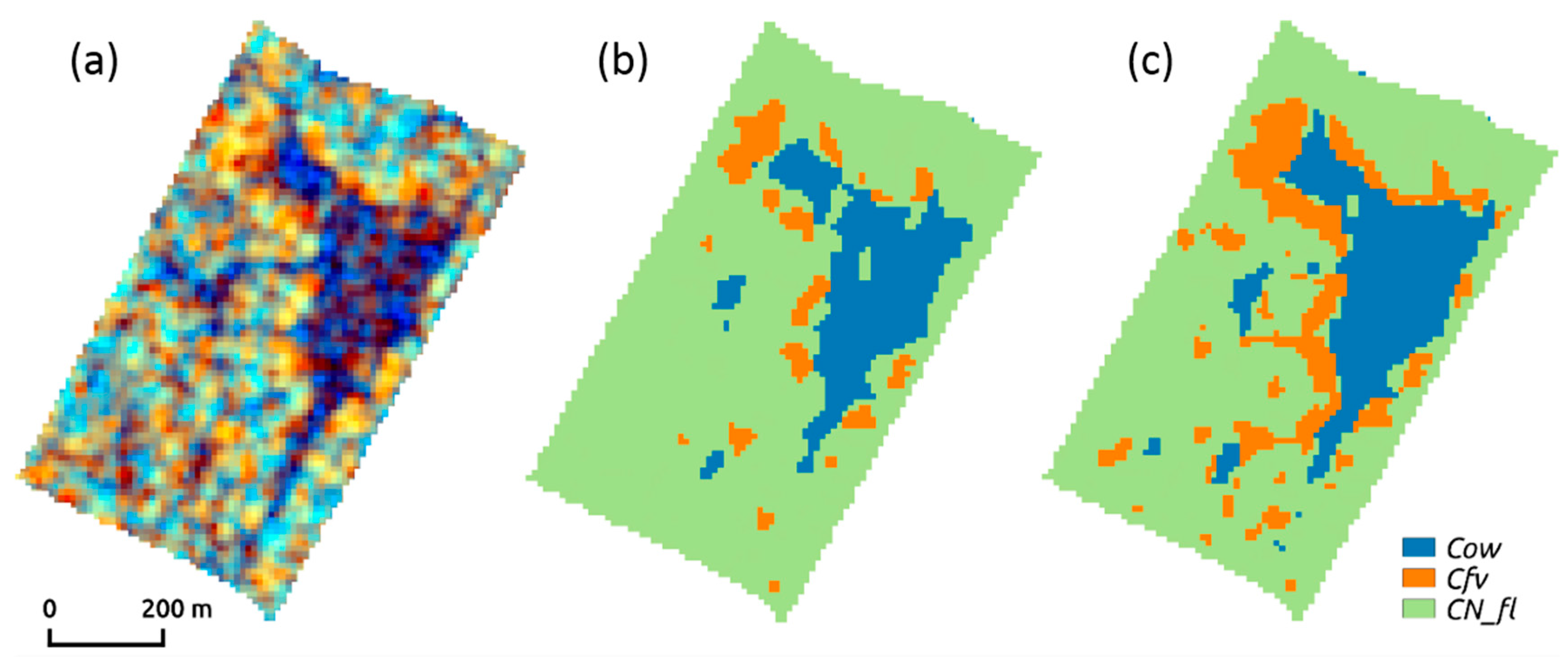
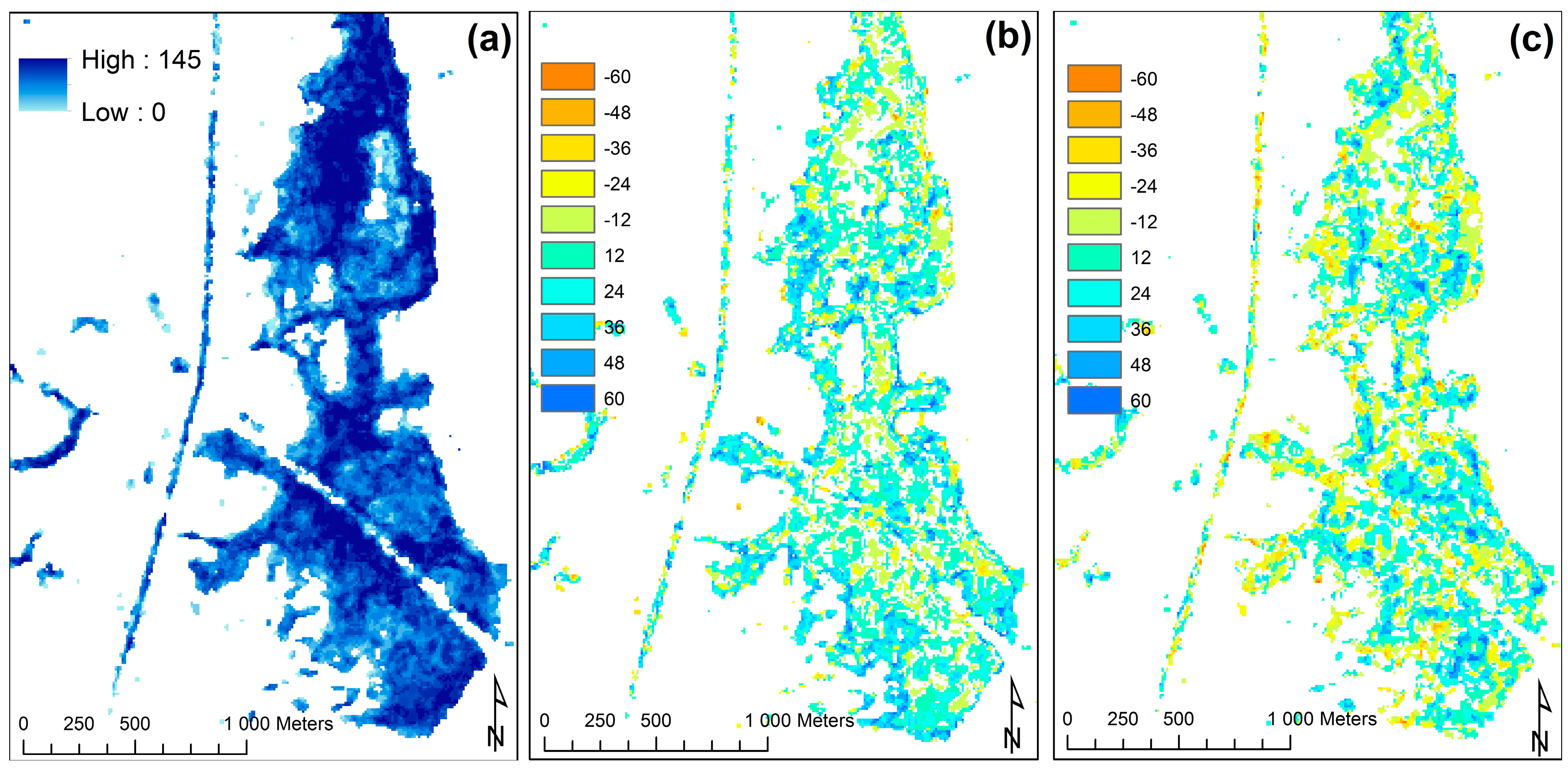
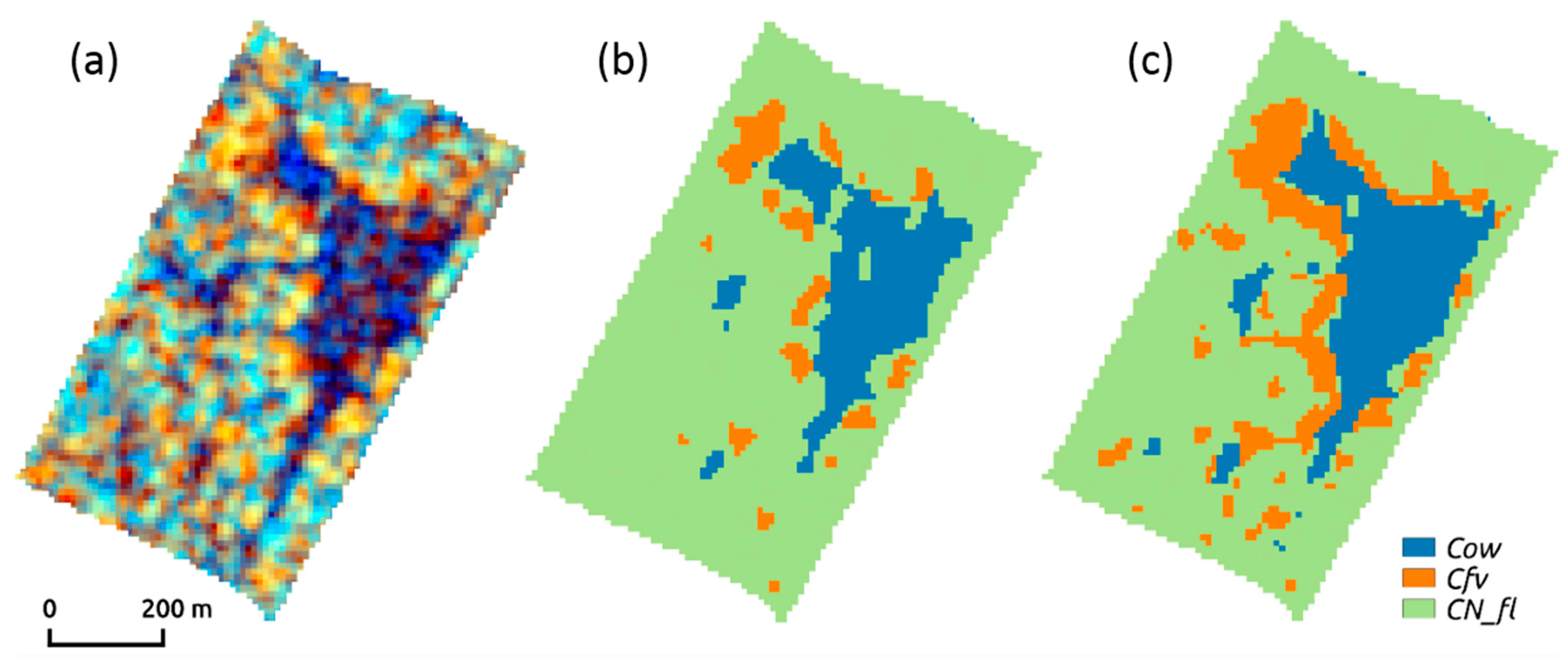
4.1. Flood Extraction
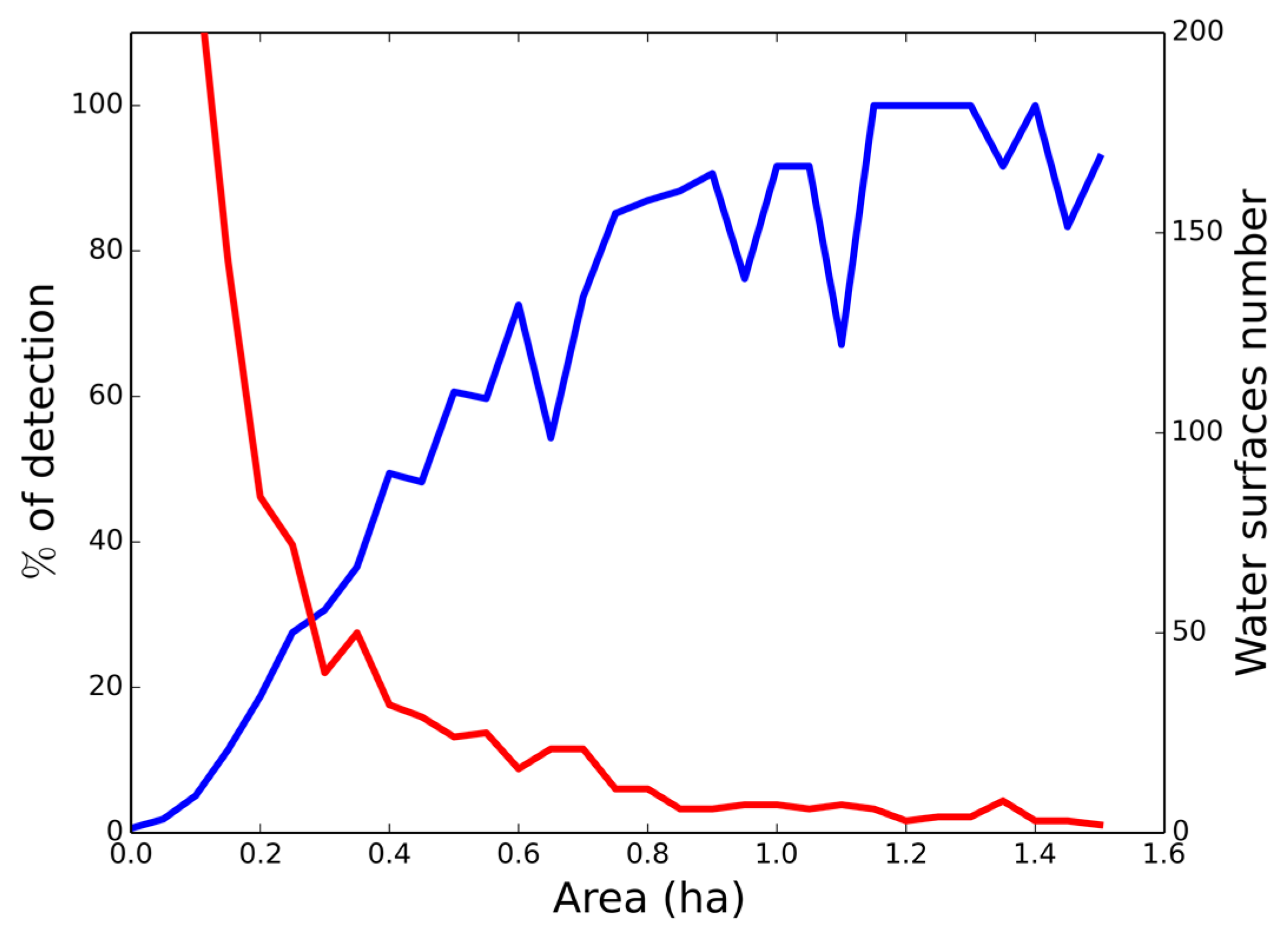
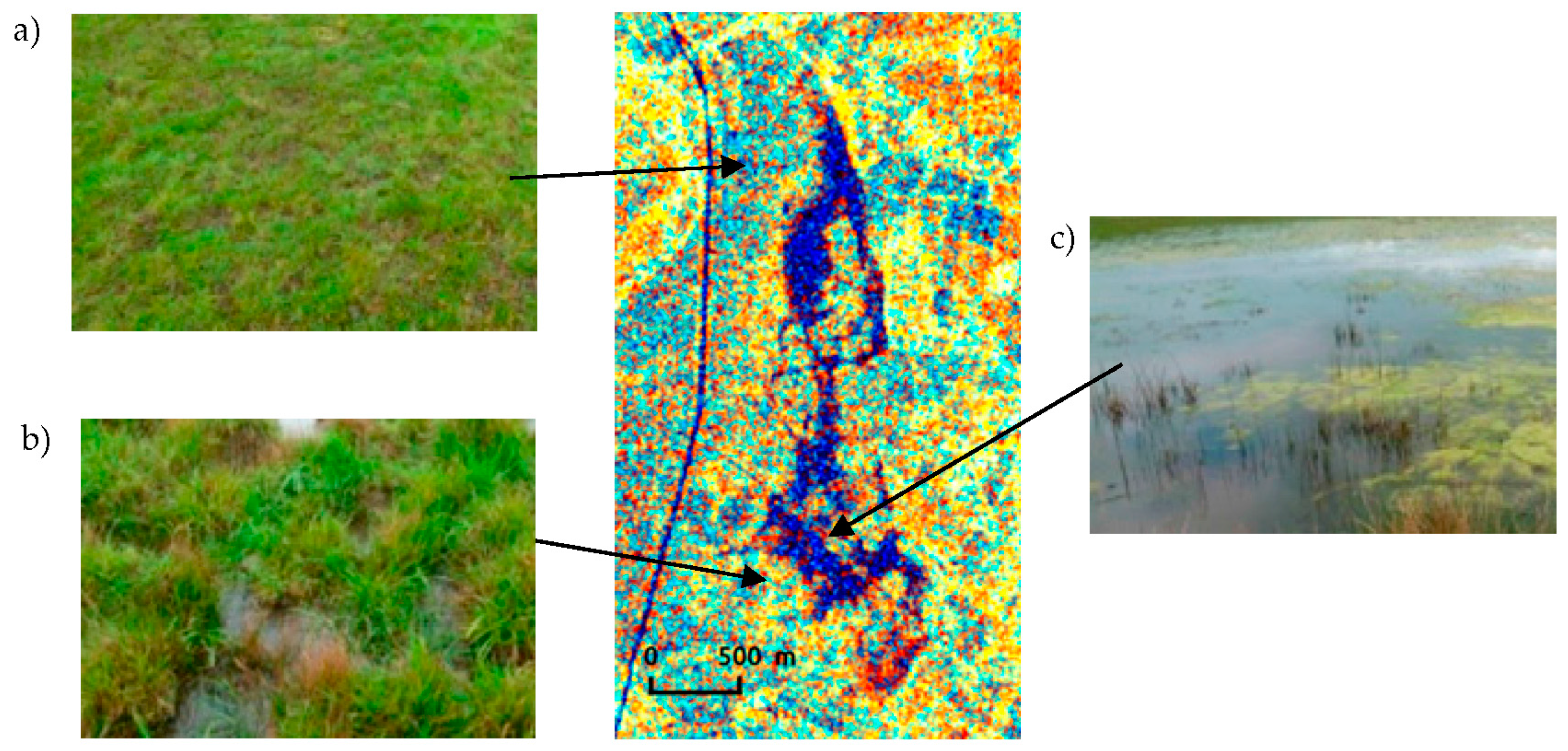
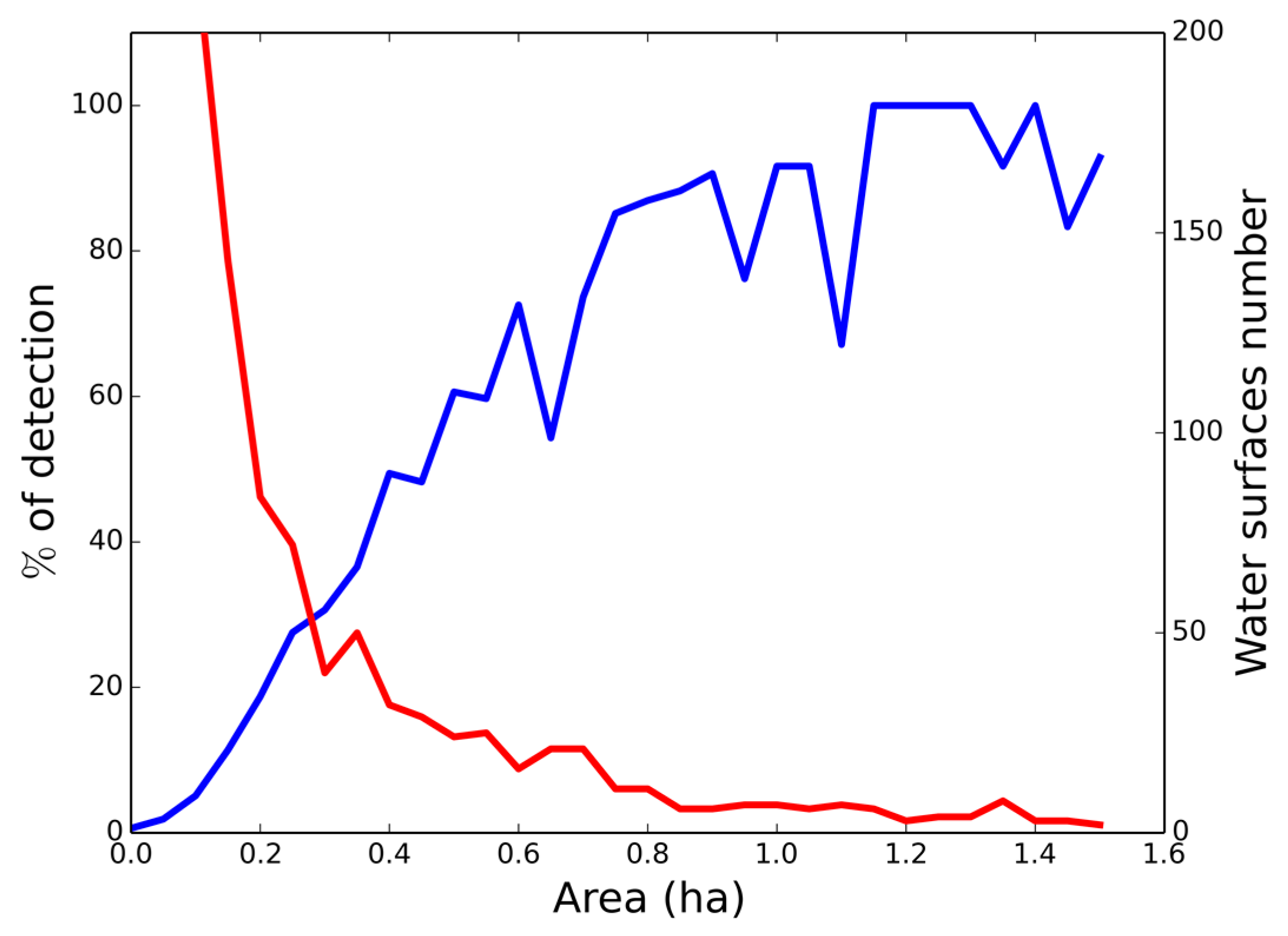
4.1.1. Ponds
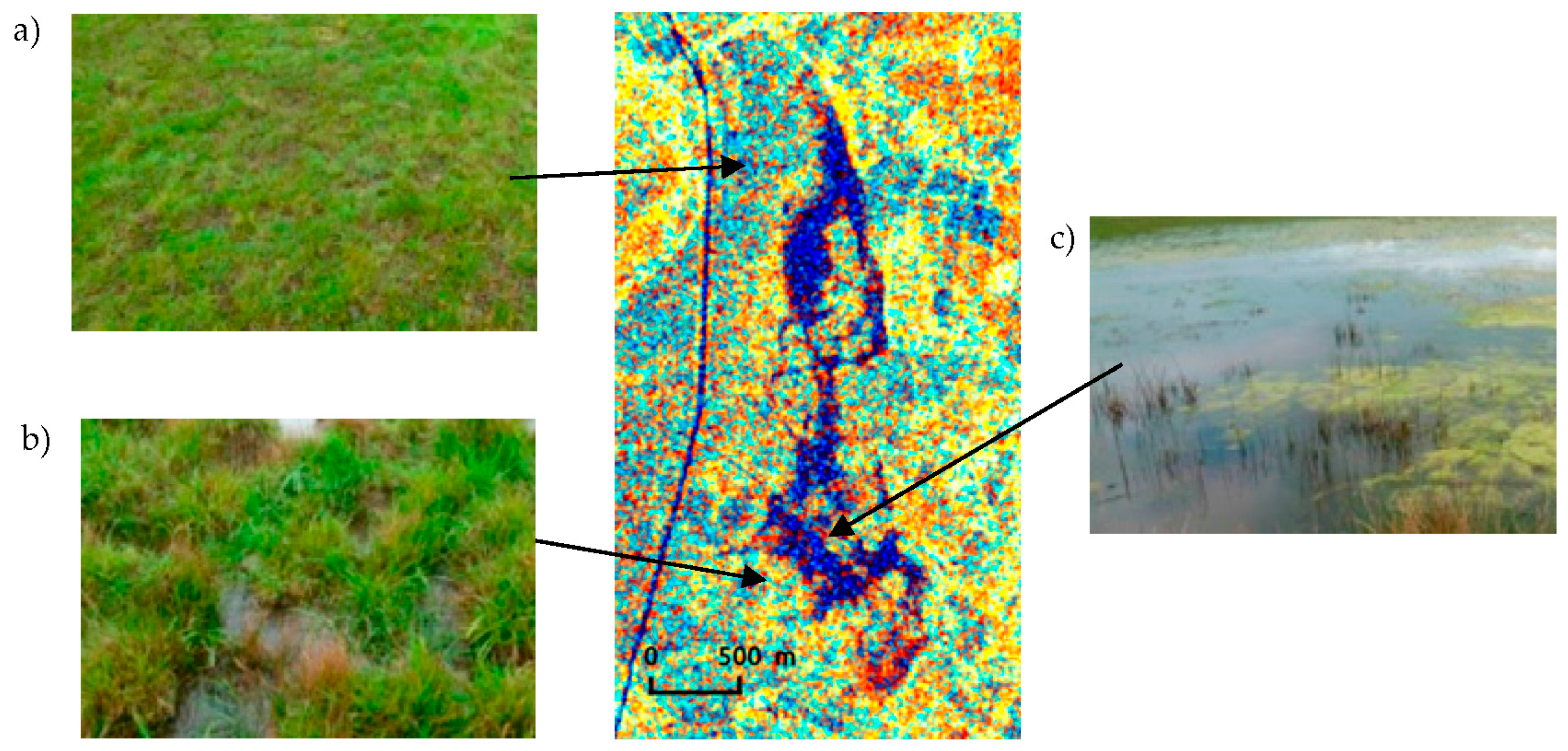
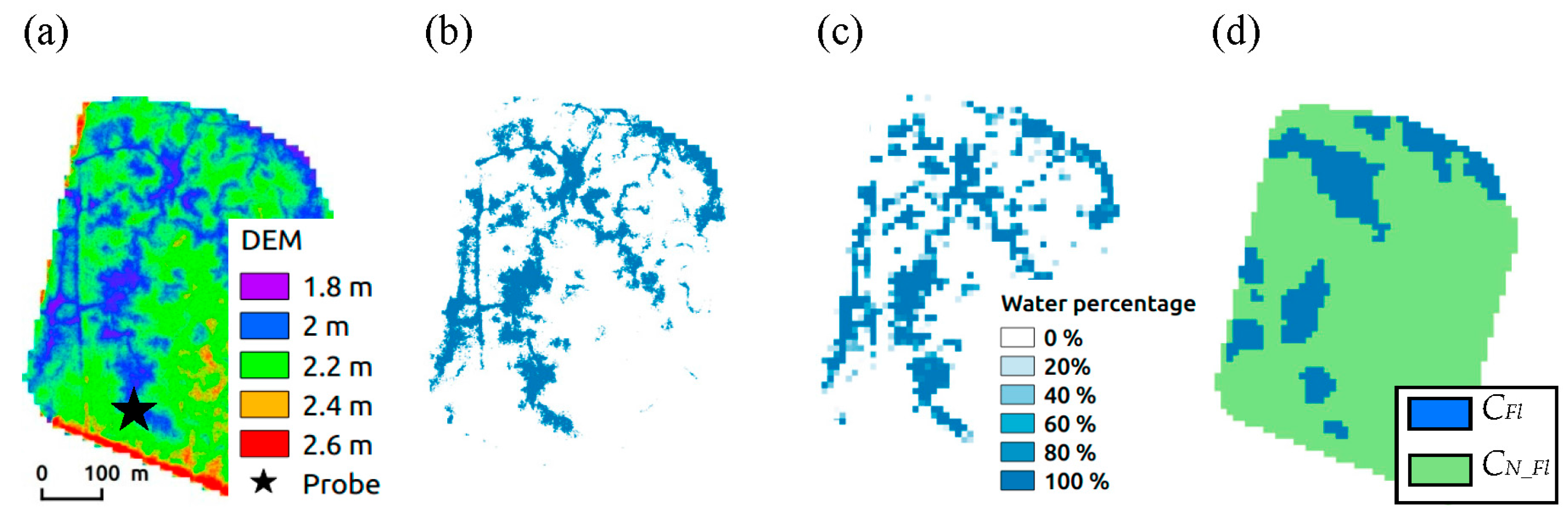
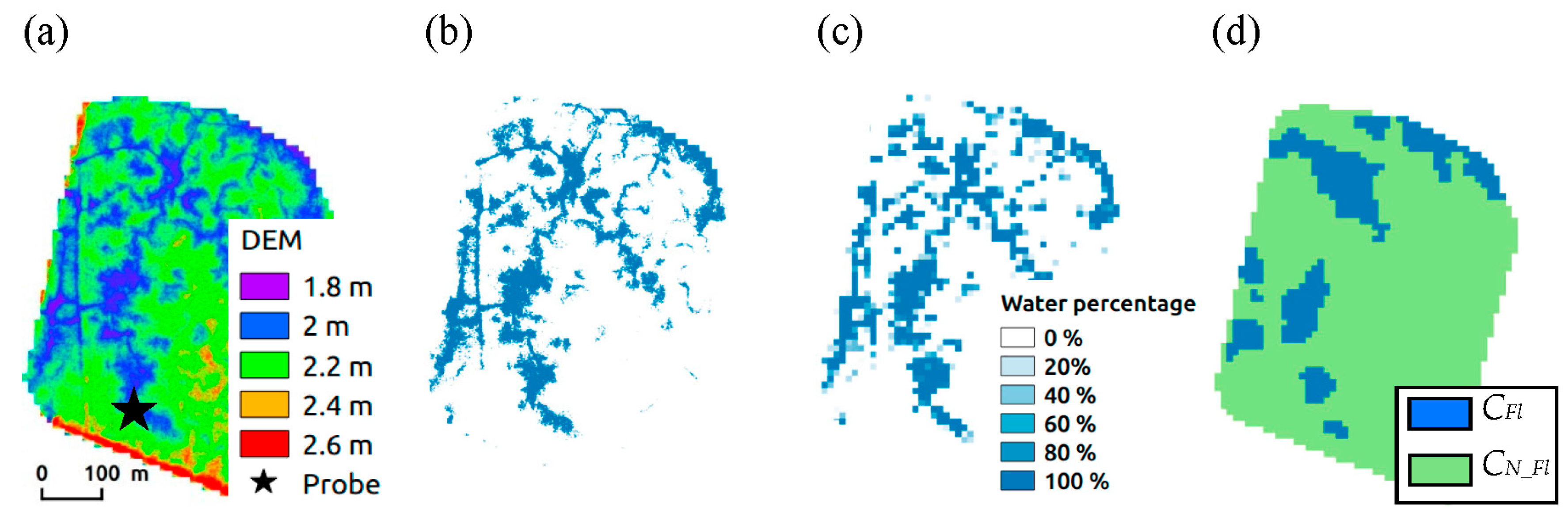
4.1.2. Grassland Floods (Intra-Field Scale)
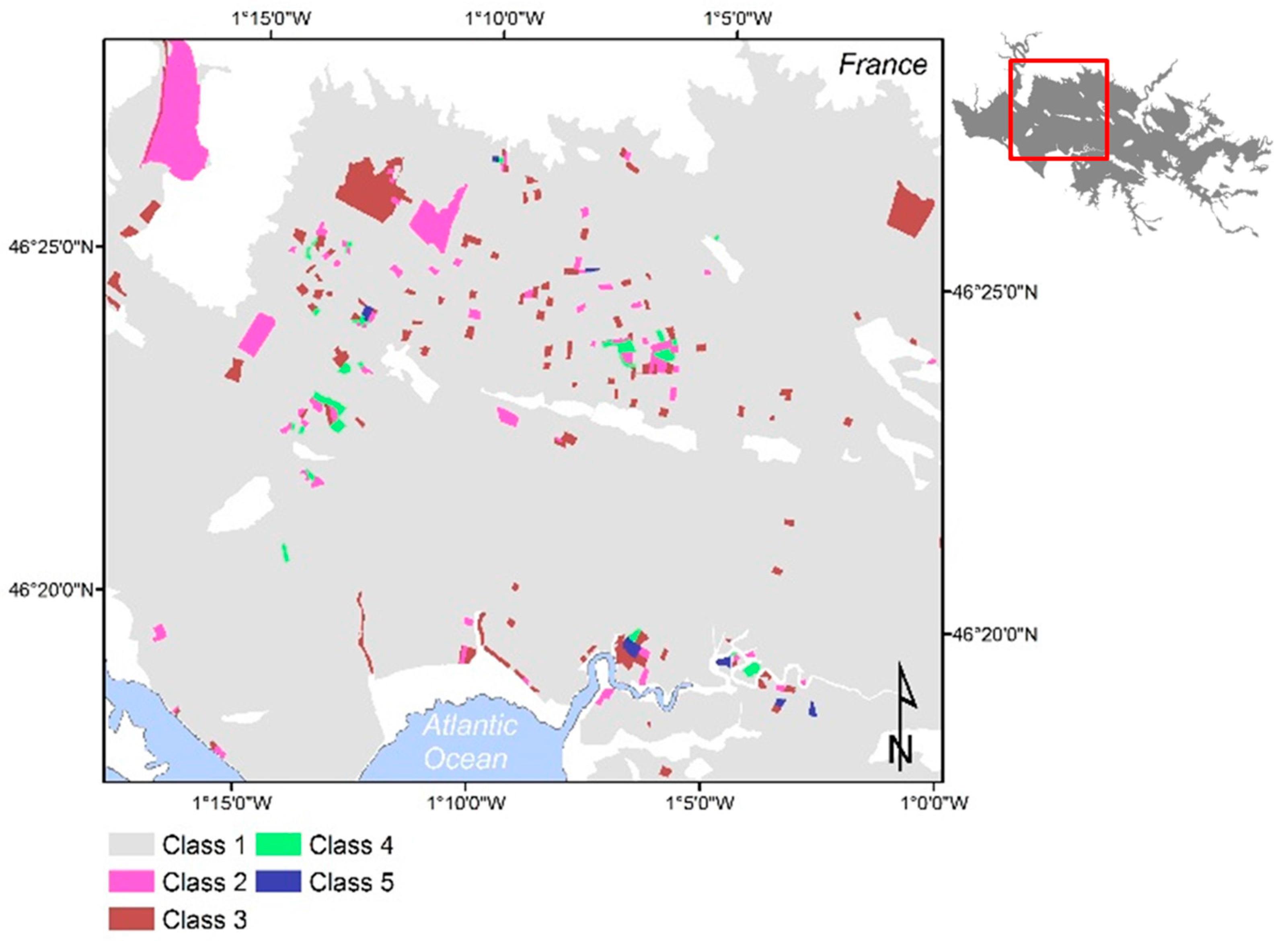
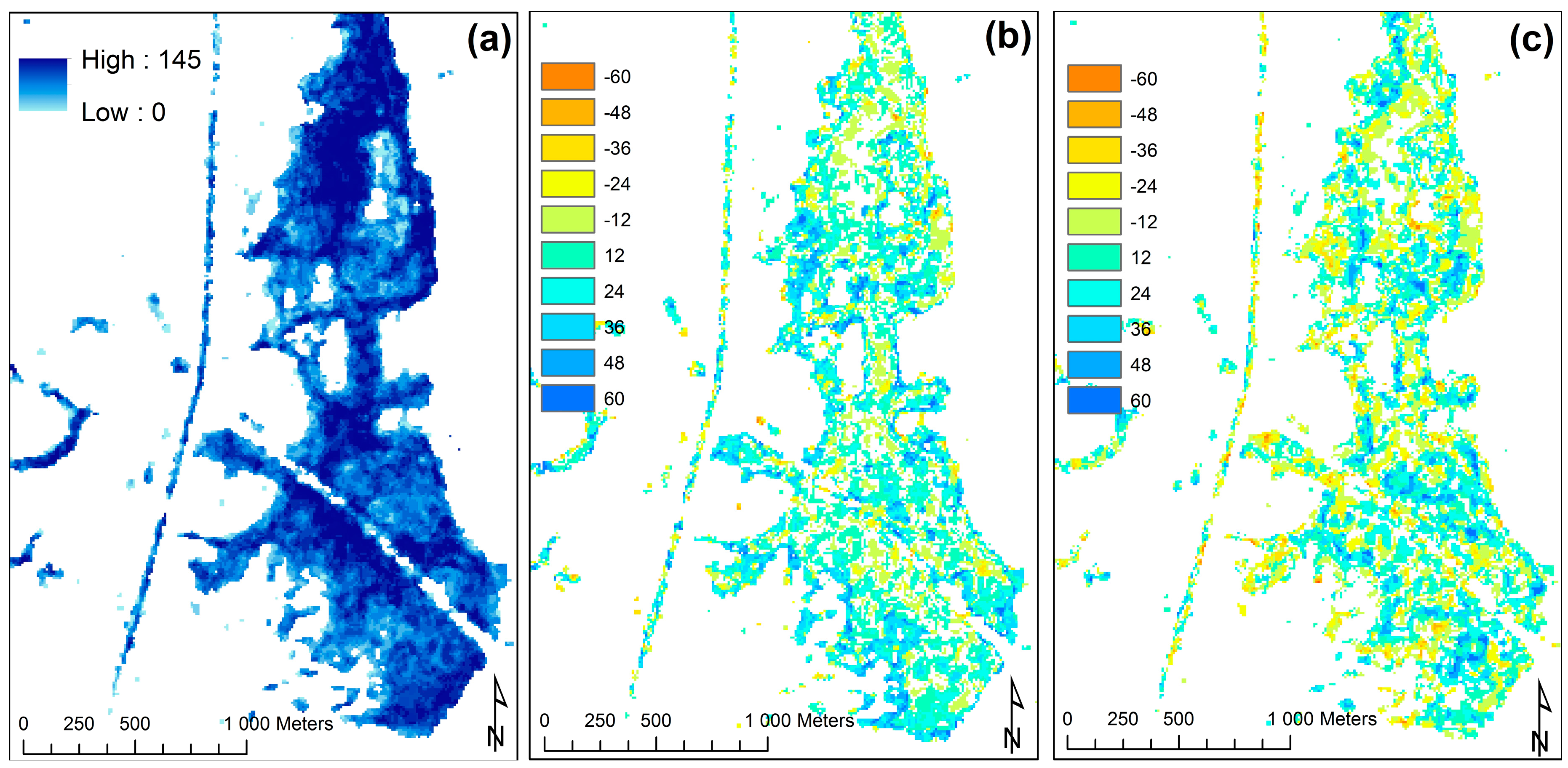
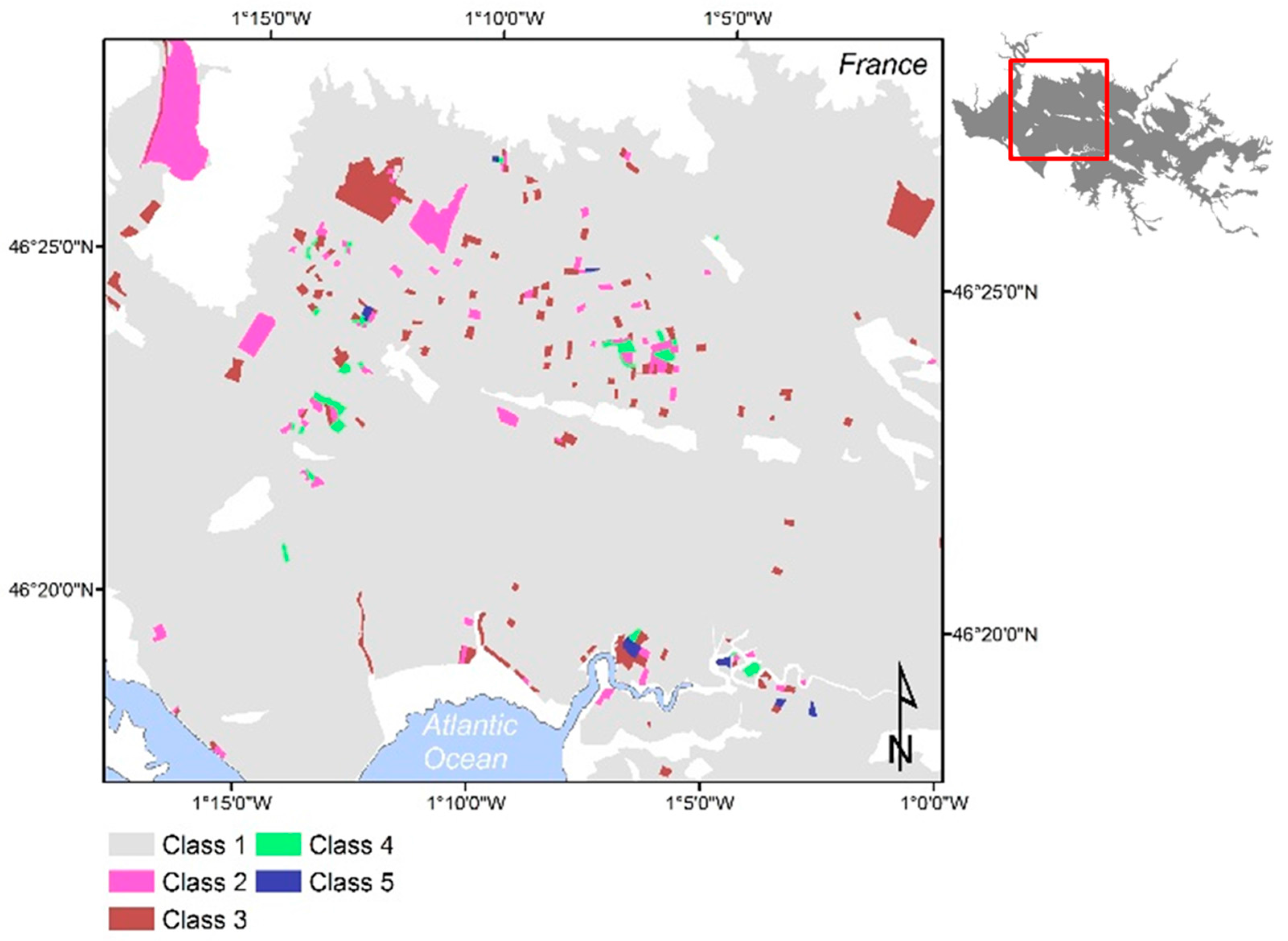
4.2. Identification of Hydrological Dynamics
4.3. Influence of the Temporal Resolution of the Time Series
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Maltby, E.; Acreman, M.C. Ecosystem services of wetlands: Pathfinder for a new paradigm. Hydrol. Sci. J. 2011, 56, 1341–1359. [Google Scholar] [CrossRef]
- Lang, M.; McDonough, O.; McCarty, G.; Oesterling, R.; Wilen, B. Enhanced detection of wetland-stream connectivity using LiDAR. Wetlands 2012, 32, 461–473. [Google Scholar] [CrossRef]
- Verhoeven, J.T. Wetlands in Europe: Perspectives for restoration of a lost paradise. Ecol. Eng. 2014, 66, 6–9. [Google Scholar] [CrossRef]
- Stratford, C.; Brewin, P.; Acreman, M.; Mountford, O. A simple model to quantify the potential trade-off between water level management for ecological benefit and flood risk. Ecohydrol. Hydrobiol. 2015, 15, 150–159. [Google Scholar] [CrossRef]
- Violle, C.; Bonis, A.; Plantegenest, M.; Cudennec, C.; Damgaard, C.; Marion, B.; le Cœur, D.; Bouzillé, J.B. Plant traits capture species diversity and coexistence mechanisms along a disturbance gradient. Oikos 2010, 120, 389–398. [Google Scholar] [CrossRef]
- Żmihorski, M.; Pärt, T.; Gustafson, T.; Berg, Å. Effects of water level and grassland management on alpha and beta diversity of birds in restored wetlands. J. Appl. Ecol. 2016, 53, 587–595. [Google Scholar] [CrossRef]
- Mitsch, W.J.; Gosselink, J.G. Wetlands, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Frison, P.L.; Mougin, E. Monitoring global vegetation dynamics with ERS-I wind scatterometer data. Int. J. Remote Sens. 1996, 17, 3201–3218. [Google Scholar] [CrossRef]
- Jarlan, L.; Mougin, E.; Frison, P.L.; Mazzega, P.; Hiernaux, P. Analysis of ERS wind scatterometer TIME series over Sahel (Mali). Remote Sens. Environ. 2002, 81, 404–415. [Google Scholar] [CrossRef]
- Wagner, W.; Lemoine, G.; Borgeaud, M.; Rott, H. A study of vegetation cover effect on ERS scatterometers data. IEEE Trans. Geosci. Remote Sens. 1999, 37, 938–948. [Google Scholar] [CrossRef]
- Kennett, G.; Li, F.K. Seasat over land scatterometer data, part I: Global overview of the Ku-band backscatter coefficients. IEEE Trans. Geosci. Remote Sens. 1989, 27, 592–605. [Google Scholar] [CrossRef]
- Frison, P.L.; Paillou, P.H.; Sayah, N.; Pottier, E.; Rudant, J.P. Spatio-temporal monitoring of evaporitic processes using multi-resolution C band radar remote sensing data: Example over the Chott el Djerid. Can. J. Remote Sens. 2013, 39, 127–137. [Google Scholar] [CrossRef]
- Scientific Data Hub—Copernicus. Available online: https://www.scihub.copernicus.eu/dhus/#/home/ (accessed on 1 June 2016).
- Martinis, S.; Rieke, C. Backscatter analysis using multi-temporal and multi-frequency SAR data in the context of flood mapping at River Saale, Germany. Remote Sens. 2015, 7, 7732–7752. [Google Scholar] [CrossRef]
- White, L.; Brisco, B.; Dabboor, M.; Schmitt, A.; Pratt, A. A collection of SAR methodologies for monitoring wetlands. Remote Sens. 2015, 7, 7615–7645. [Google Scholar] [CrossRef]
- Yan, K.; di Baldassarre, G.; Solomatine, D.P.; Schumann, G.J.P. A review of low-cost space-borne data for flood modelling: Topography, flood extent and water level. Hydrol. Processes 2015, 29, 3368–3387. [Google Scholar] [CrossRef]
- Hall-Atkinson, C.; Smith, L.-C. Delineation of delta ecozones using interferometric SAR phase coherence: Mackenzie River Delta, NWT. Can. Remote Sens. Environ. 2001, 78, 229–238. [Google Scholar] [CrossRef]
- Maréchal, C.; Pottier, E.; Hubert-Moy, L.; Rapinel, S. One year wetland survey investigations from quad-pol RADARSAT-2 time-series SAR images. Can. J. Remote Sens. 2012, 38, 240–252. [Google Scholar] [CrossRef]
- Brisco, B.; Kapfer, M.; Hirose, T.; Tedford, B.; Liu, J. Evaluation of C-band polarization diversity and polarimetry for wetland mapping. Can. J. Remote Sens. 2011, 37, 82–92. [Google Scholar] [CrossRef]
- Betbeder, J.; Rapinel, S.; Corpetti, T.; Pottier, E.; Corgne, S.; Hubert-Moy, L. Multitemporal classification of TerraSAR-X data for wetland vegetation mapping. J. Appl. Remote Sens. 2014. [Google Scholar] [CrossRef]
- Van der Sanden, J.J.; Geldsetzer, T.; Short, N.; Brisco, B. Advanced SAR Applications for Canada’s Cryosphere (Freshwater Ice and Permafrost); Final Technical Report for the Government Related Initiatives Program (GRIP); Natural Resources Canada: Ottawa, ON, Canada, 2012. [Google Scholar]
- Hess, L.L.; Melack, J.M.; Filoso, S.; Wang, Y. Delineation of inundated area and vegetation along the Amazon floodplain with the SIR-C synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 1995, 33, 896–904. [Google Scholar] [CrossRef]
- Vachon, P.W.; Wolfe, J. C-band cross-polarization wind speed retrieval. IEEE Trans. Geosci. Remote Sens. 2011, 8, 456–459. [Google Scholar] [CrossRef]
- Scheuchl, B.; Flett, D.; Caves, R.; Cumming, I. Potential of RADARSAT-2 data for operational sea ice monitoring. Can. J. Remote Sens. 2004, 30, 448–461. [Google Scholar] [CrossRef]
- Di Baldassarre, G.; Schumann, G.; Brandimarte, L.; Bates, P. Timely low resolution SAR imagery to support floodplain modelling: A case study review. Surv. Geophys. 2011, 32, 255–269. [Google Scholar] [CrossRef]
- Schumann, G.; Henry, J.-B.; Hoffmann, L.; Pfister, L.; Pappenberger, F.; Matgen, P. Demonstrating the high potential of remote sensing in hydraulic modeling and flood risk management. In Proceedings of the Annual Conference of the Remote Sensing and Photogrammetry Society with the NERC Earth Observation Conference, Portsmouth, UK, 6–9 September 2005.
- Schmitt, A.; Brisco, B. Wetland monitoring using the curvelet-based change detection method on polarimetric SAR imagery. Water 2013, 5, 1036–1051. [Google Scholar] [CrossRef]
- Martinez, J.M.; le Toan, T. Mapping of flood dynamics and spatial distribution of vegetation in the Amazon floodplain using multitemporal SAR data. Remote Sens. Environ. 2007, 108, 209–223. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Chini, M.; Pierdicca, N.; Guerriero, L.; Ferrazzoli, P. Flood monitoring using multi-temporal COSMO-SkyMed data: Image segmentation and signature interpretation. Remote Sens. Environ. 2011, 115, 990–1002. [Google Scholar] [CrossRef]
- Zhao, L.; Yang, J.; Li, P.; Zhang, L. Seasonal inundation monitoring and vegetation pattern mapping of the Erguna floodplain by means of a RADARSAT-2 fully polarimetric time series. Remote Sens. Environ. 2014, 152, 426–440. [Google Scholar] [CrossRef]
- Voormansik, K.; Praks, J.; Antropov, O.; Jagomagi, J.; Zalite, K. Flood mapping with TerraSAR-X in forested regions in Estonia. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 562–577. [Google Scholar] [CrossRef]
- Boni, G.; Ferraris, L.; Pulvirenti, L.; Squicciarino, G.; Pierdicca, N.; Candela, L.; Pisani, A.R.; Zoffoli, S.; Onori, R.; Proietti, C.; et al. A prototype system for flood monitoring based on flood forecast combined with COSMO-SkyMed and Sentinel-1 data. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2016, 99, 1–12. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Pierdicca, N.; Chini, M.; Guerriero, L. An algorithm for operational flood mapping from Synthetic Aperture Radar (SAR) data using fuzzy logic. Nat. Hazards Earth Syst. Sci. 2011, 11, 529–540. [Google Scholar] [CrossRef]
- Martinis, S.; Twele, A.; Voigt, S. Towards operational near real-time flood detection using a split-based automatic thresholding procedure on high resolution TerraSAR-X data. Nat. Hazards Earth Syst. 2009, 9, 303–314. [Google Scholar] [CrossRef]
- Matgen, P.; Hostache, R.; Schumann, G.; Pfister, L.; Hoffmann, L.; Savenije, H.H.G. Towards an automated SAR-based flood monitoring system: Lessons learned from two case studies. Phys. Chem. Earth Parts ABC 2011, 36, 241–252. [Google Scholar] [CrossRef]
- Martinis, S.; Kersten, J.; Twele, A. A fully automated TerraSAR-X based flood service. J. Photogramm. Remote Sens. 2015, 104, 203–212. [Google Scholar] [CrossRef]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 6, 679–698. [Google Scholar] [CrossRef]
- Aulard-Macler, M. Sentinel-1 Product Definition, MDA Technical Note Ref. S1-RS-MDA-52–7440; MacDonald, Dettwiler and Associates (MDA): Richmond, BC, Canada, 2012. [Google Scholar]
- Rapinel, S.; Hubert-Moy, L.; Clément, B.; Nabucet, J.; Cudennec, C. Ditch network extraction and hydrogeomorphological characterization using LiDAR-derived DTM in wetlands. Hydrol. Res. 2015, 46, 276–290. [Google Scholar] [CrossRef]
- Töyrä, J.; Pietroniro, A.; Hopkinson, C.; Kalbfleisch, W. Assessment of airborne scanning laser altimetry (LiDAR) in a deltaic wetland environment. Can. J. Remote Sens. 2003, 29, 718–728. [Google Scholar] [CrossRef]
- SNAP Software, Brockmann Consult, Array Systems Computing and C-S. Available online: http://www.step.esa.int/main/toolboxes/snap/ (accessed on 1 June 2016).
- Miranda, N.; Meadows, P.J. Radiometric Calibration of S-1 Level-1 Products Generated by the S-1 IPF, ESA-EOPG-CSCOP-TN-0002; European Space Agency: Paris, France, 2015. [Google Scholar]
- Perona, P.; Malik, J. Scale-space and edge detection using anisotropic diffusion. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 629–639. [Google Scholar] [CrossRef]
- Lee, J.-S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Quegan, S.L.; le Toan, T.; Yu, J.J.; Ribbes, F.; Floury, N. Multitemporal ERS SAR analysis applied to forest mapping. IEEE Trans. Geosci. Remote Sens. 2000, 38, 741–753. [Google Scholar] [CrossRef]
- Kanaa, T.F.; Tonye, E.; Mercier, G.; Onana, V.D.P.; Ngono, J.M.; Frison, P.L.; Rudant, J.P.; Garello, R. Detection of oil slick signatures in SAR images by fusion of hysteresis thresholding responses. Geosci. Remote Sens. Symp. 2003, 4, 2750–2752. [Google Scholar]
- Longbotham, N.; Pacifici, F.; Glenn, T.; Zare, A.; Volpi, M.; Tuia, D.; Christophe, E.; Michel, J.; Inglada, J.; Chanussot, J.; et al. Multi-modal change detection, application to the detection of flooded areas: Outcome of the 2009–2010 data fusion contest. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2012, 5, 331–342. [Google Scholar] [CrossRef]
- Murtagh, F.; Legendre, P. Ward’s hierarchical agglomerative clustering method: Which algorithms implement ward’s criterion? J. Classif. 2014, 31, 274–295. [Google Scholar] [CrossRef]
- Touzi, R.; Deschamps, A.; Rother, G. Wetland characterization using polarimetric RADARSAT-2 capability. Can. J. Remote Sens. 2007, 33, S56–S67. [Google Scholar] [CrossRef]
- Long, S.; Fatoyinbo, T.E.; Policelli, F. Flood extent mapping for Namibia using change detection and thresholding with SAR. Environ. Res. Lett. 2014. [Google Scholar] [CrossRef]
- Senthilnath, J.; Shenoy, H.V.; Rajendra, R.; Omkar, S.N.; Mani, V.; Diwakar, P.G. Integration of speckle de-noising and image segmentation using Synthetic Aperture Radar image for flood extent extraction. J. Earth Syst. Sci. 2013, 122, 559–572. [Google Scholar] [CrossRef]
- Merlin, A.; Bonis, A.; Damgaard, C.F.; Mesléard, F. Competition is a strong driving factor in wetlands, peaking during drying out periods. PLoS ONE 2015, 10, e0130152. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wassen, M.J.; Peeters, W.H.; Venterink, H.O. Patterns in vegetation, hydrology, and nutrient availability in an undisturbed river floodplain in Poland. Plant Ecol. 2003, 165, 27–43. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Polarization | VV/VH |
|---|---|
| Spatial resolution | 20 × 22 m2 (az. × gr. range) |
| Pixel size | 10 × 10 m2 (az. × gr. range) |
| Swath width | 250 km |
| Incidence angle | 36°–42° |
| Equivalent Number of Looks | 4.9 |
| Dates | 2014: 6, 18, 30 *,~December |
| 2015: 11 January | |
| 4 *, 16 ~, 28 February | |
| 12 *,~, 24 March | |
| 5 ~, 17 *, 29 ~April | |
| 11, 23 *,~June |
| Radar Classification | Omission Error (%) | |||
|---|---|---|---|---|
| Flooded | Non-Flooded | |||
| DTM estimate (reference data) | Flooded | 12,186 | 3463 | 22 |
| Non-flooded | 2246 | 13,403 | 14 | |
| Commission error (%) | 15 | 20 | ||
| Radar Classification | Omission Error (%) | |||
|---|---|---|---|---|
| Flooded | Non-Flooded | |||
| DTM estimate (reference data) | Flooded | 2053 | 2957 | 59 |
| Non-flooded | 547 | 49,823 | 1 | |
| Commission error (%) | 21 | 6 | ||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cazals, C.; Rapinel, S.; Frison, P.-L.; Bonis, A.; Mercier, G.; Mallet, C.; Corgne, S.; Rudant, J.-P. Mapping and Characterization of Hydrological Dynamics in a Coastal Marsh Using High Temporal Resolution Sentinel-1A Images. Remote Sens. 2016, 8, 570. https://doi.org/10.3390/rs8070570
Cazals C, Rapinel S, Frison P-L, Bonis A, Mercier G, Mallet C, Corgne S, Rudant J-P. Mapping and Characterization of Hydrological Dynamics in a Coastal Marsh Using High Temporal Resolution Sentinel-1A Images. Remote Sensing. 2016; 8(7):570. https://doi.org/10.3390/rs8070570
Chicago/Turabian StyleCazals, Cécile, Sébastien Rapinel, Pierre-Louis Frison, Anne Bonis, Grégoire Mercier, Clément Mallet, Samuel Corgne, and Jean-Paul Rudant. 2016. "Mapping and Characterization of Hydrological Dynamics in a Coastal Marsh Using High Temporal Resolution Sentinel-1A Images" Remote Sensing 8, no. 7: 570. https://doi.org/10.3390/rs8070570