
An Imaging Compensation Algorithm for Spaceborne High-Resolution SAR Based on a Continuous Tangent Motion Model

Abstract
:
1. Introduction
2. Continuous Tangent Model and Two-Way Distance
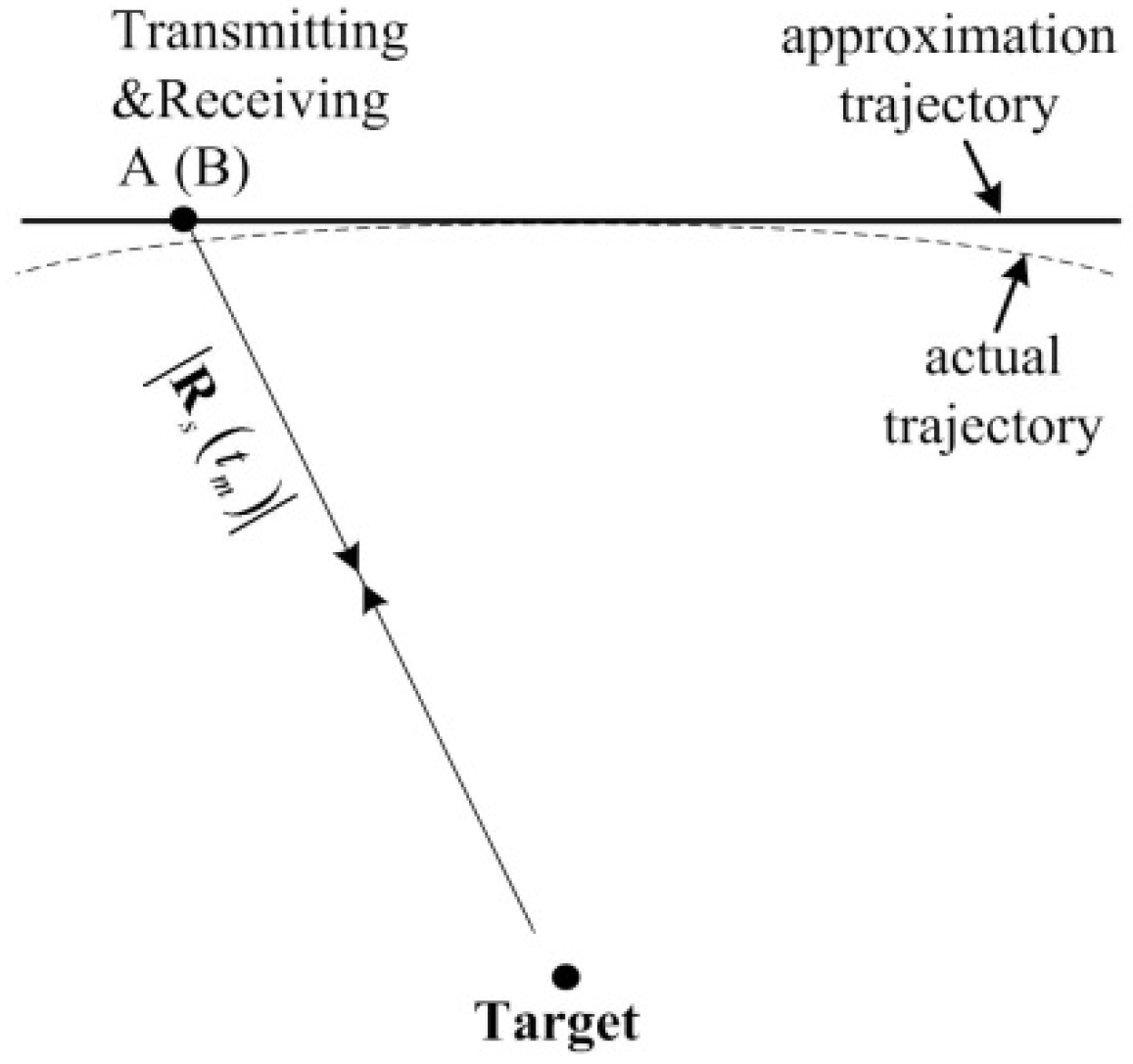
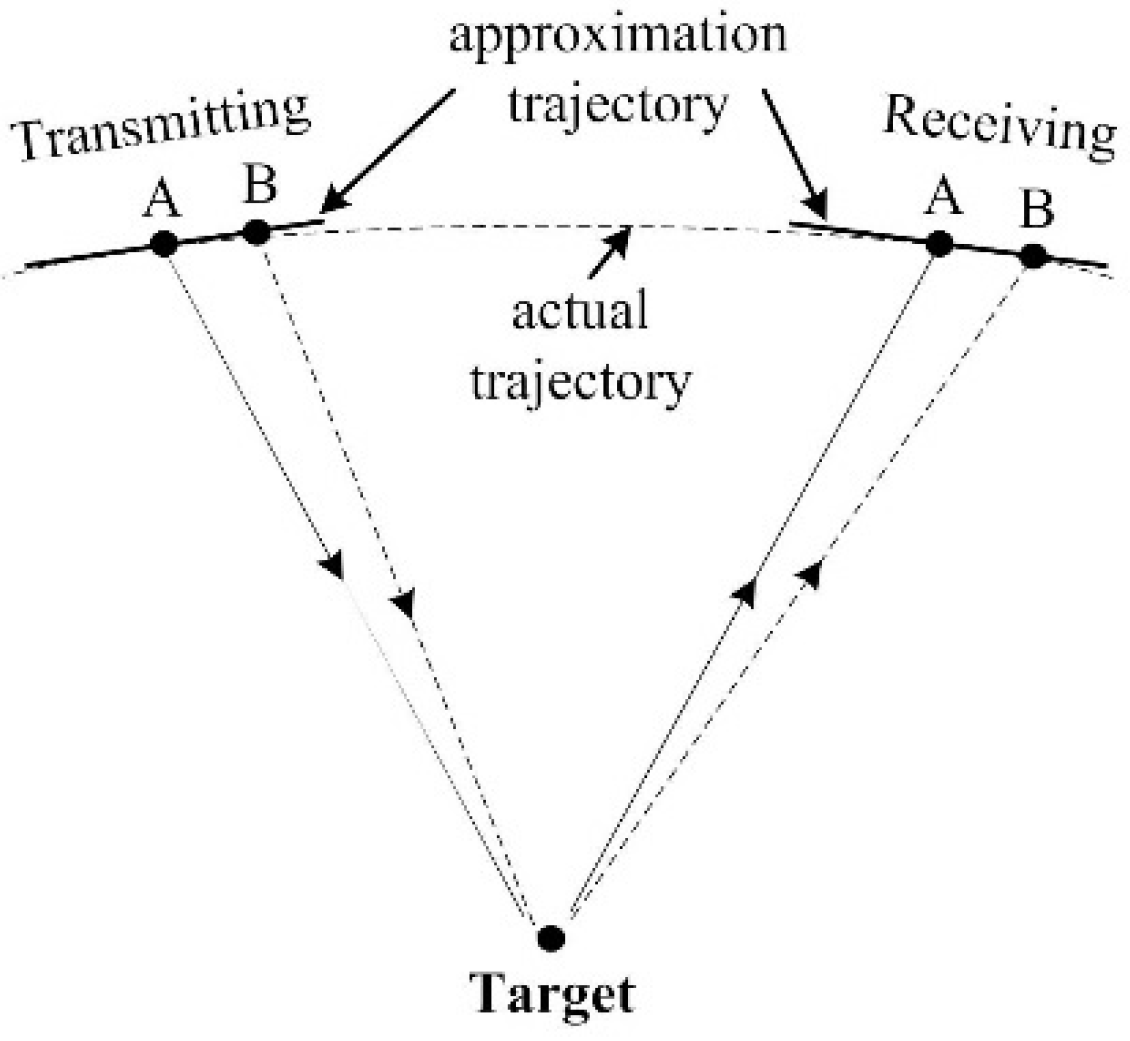
2.1. Continuous Tangent Model
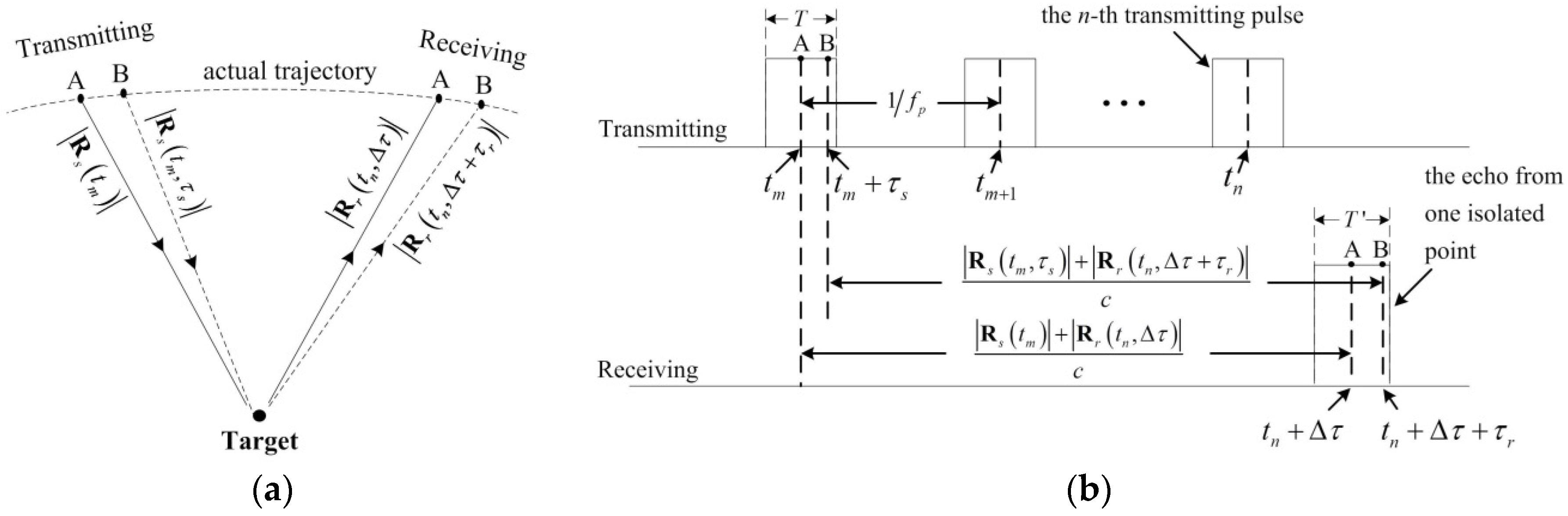
2.2. Two-Way Distance
3. Echo Expression of Spaceborne SAR Based on the Continuous Tangent Model
3.1. Time-Scaling Factor
3.2. Transmitting–Receiving Rate
3.3. Transmitting–Receiving Constant
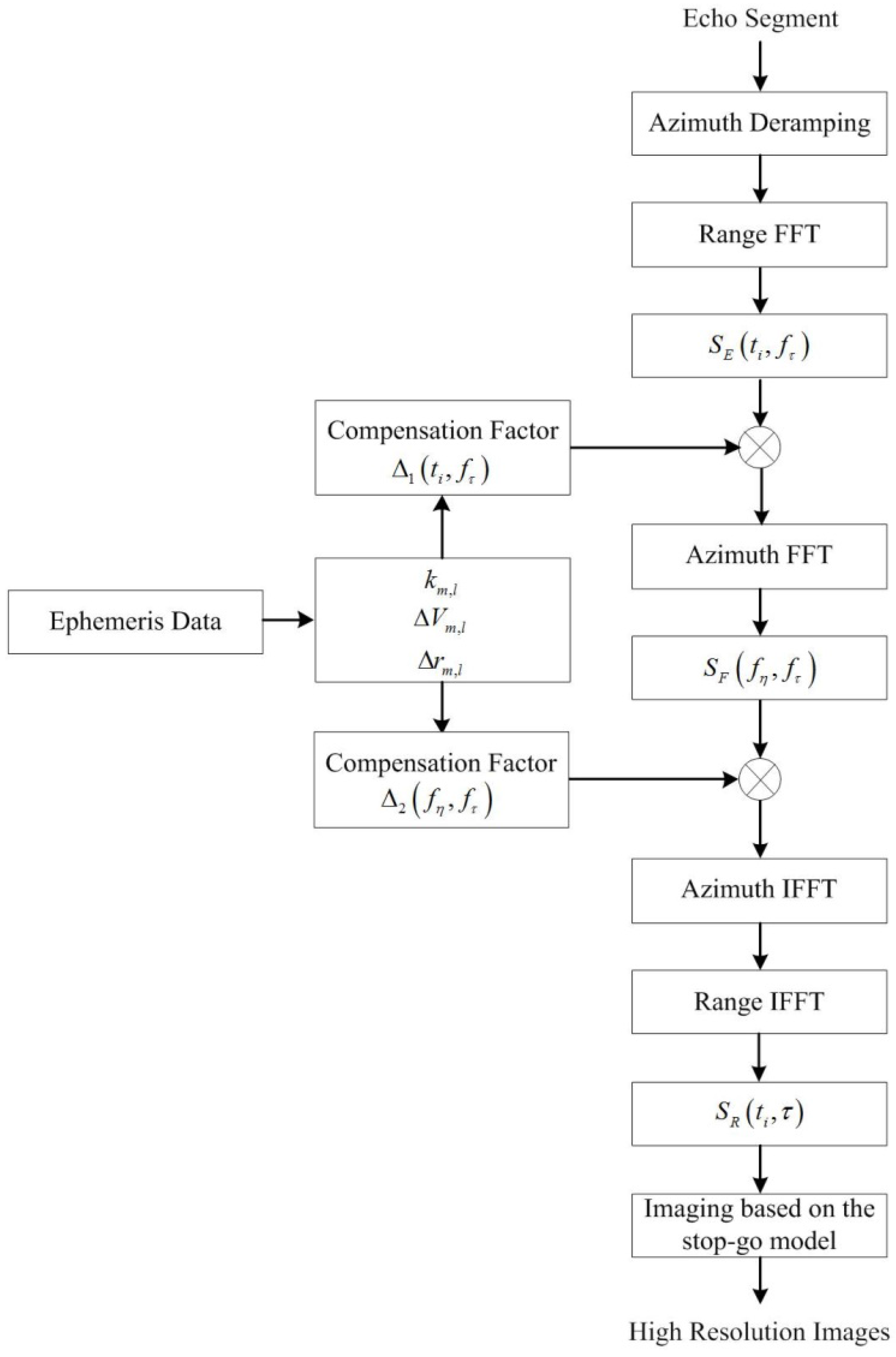
4. Imaging Compensation Algorithm
5. Simulation and Validation
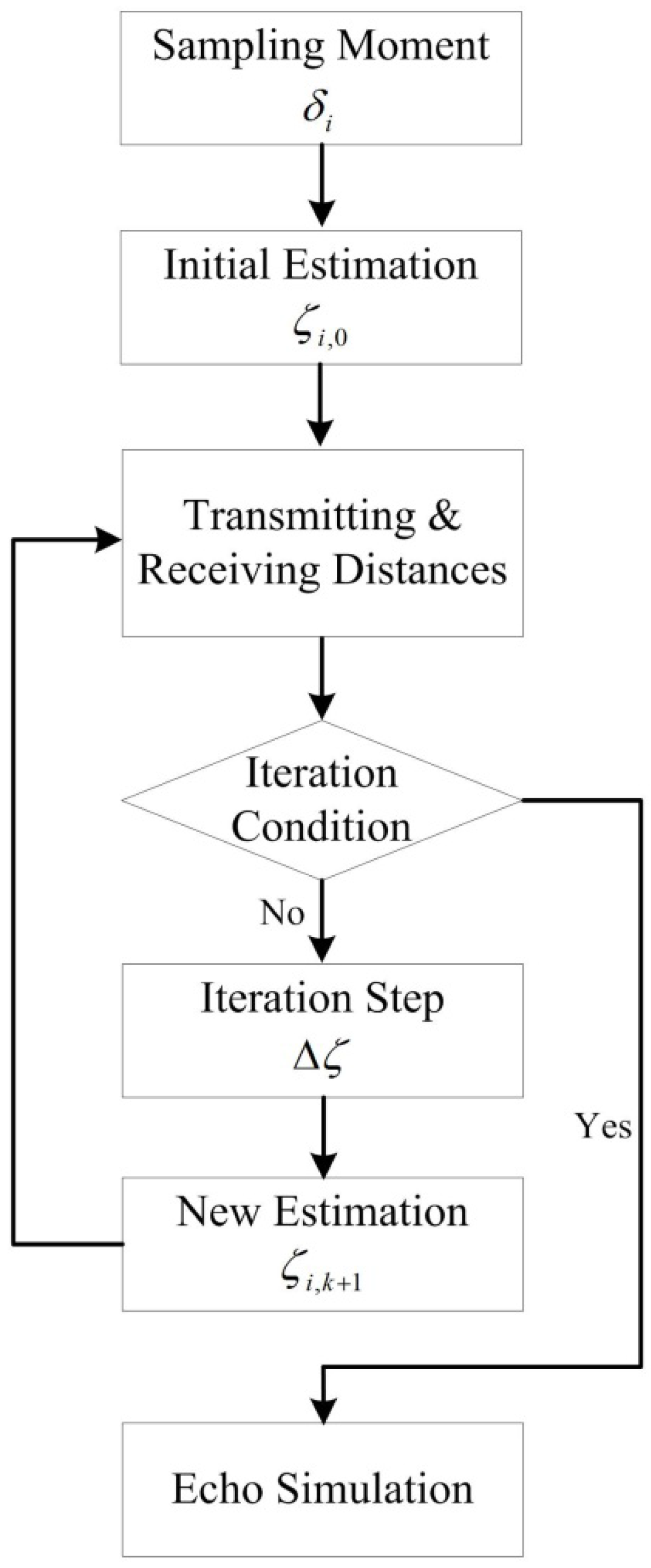
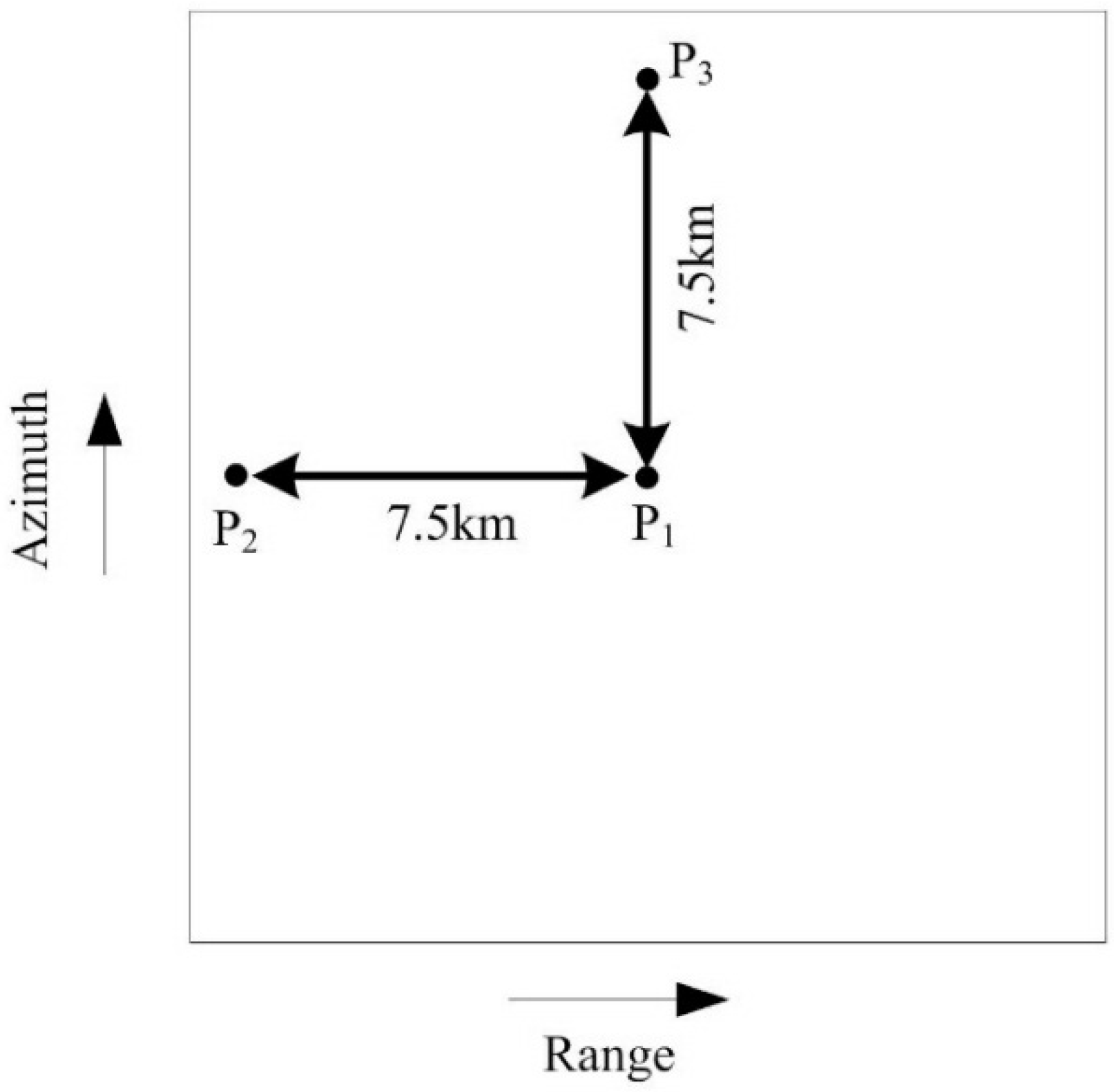
5.1. Simulation Method and Parameters
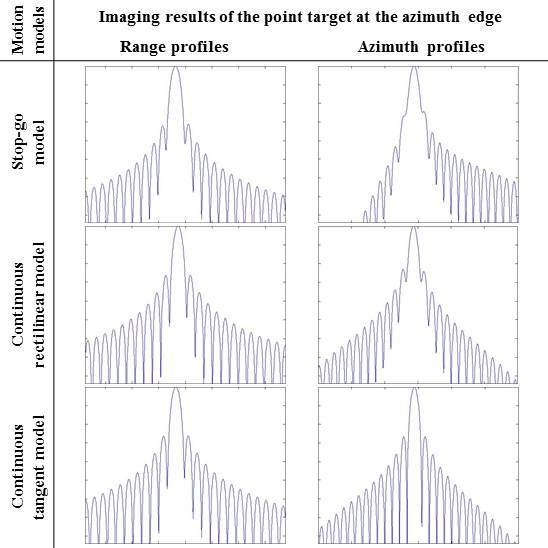
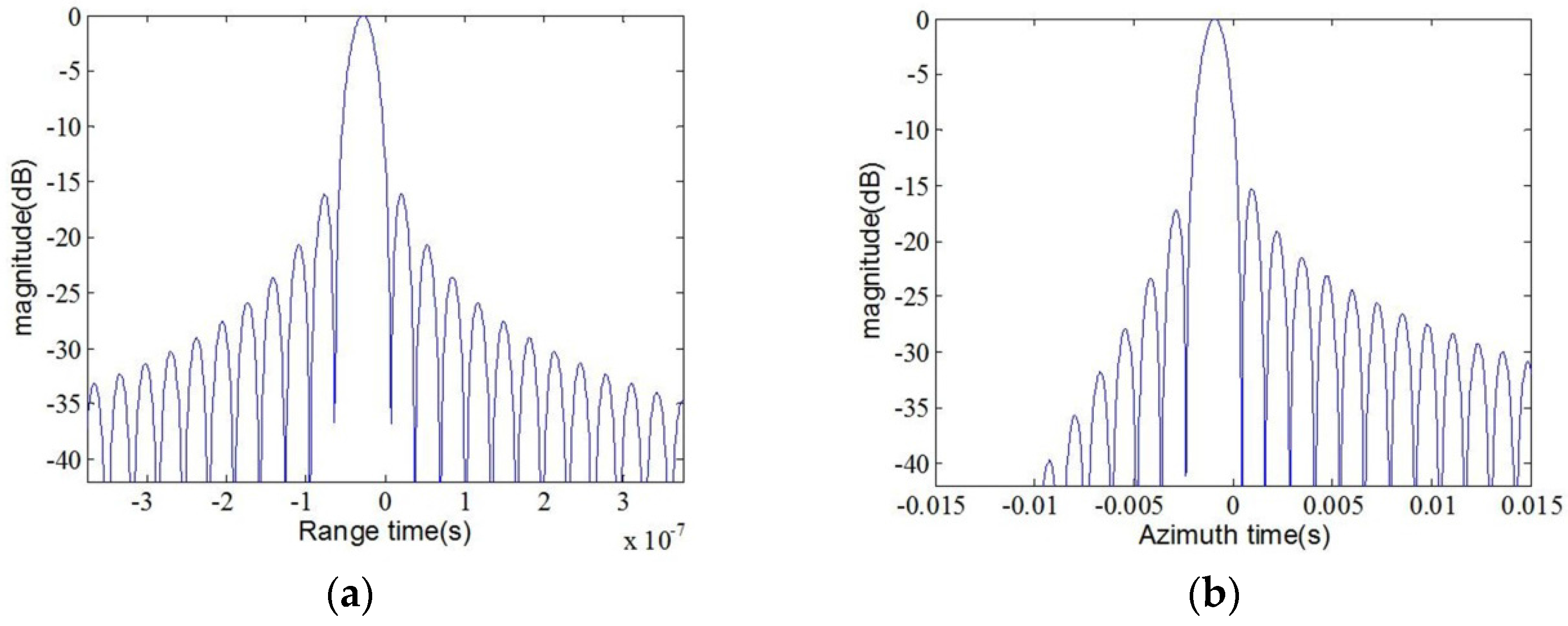
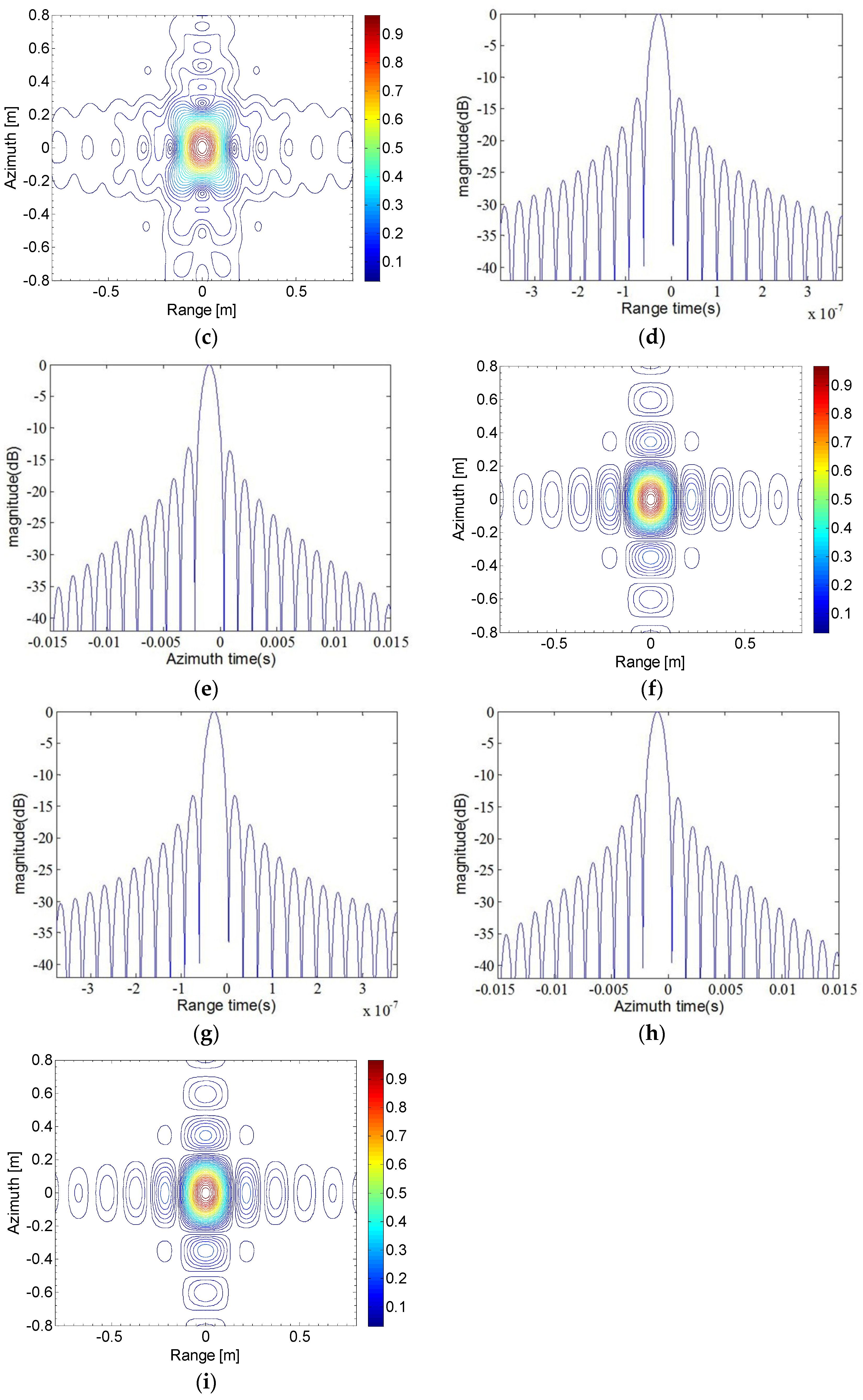
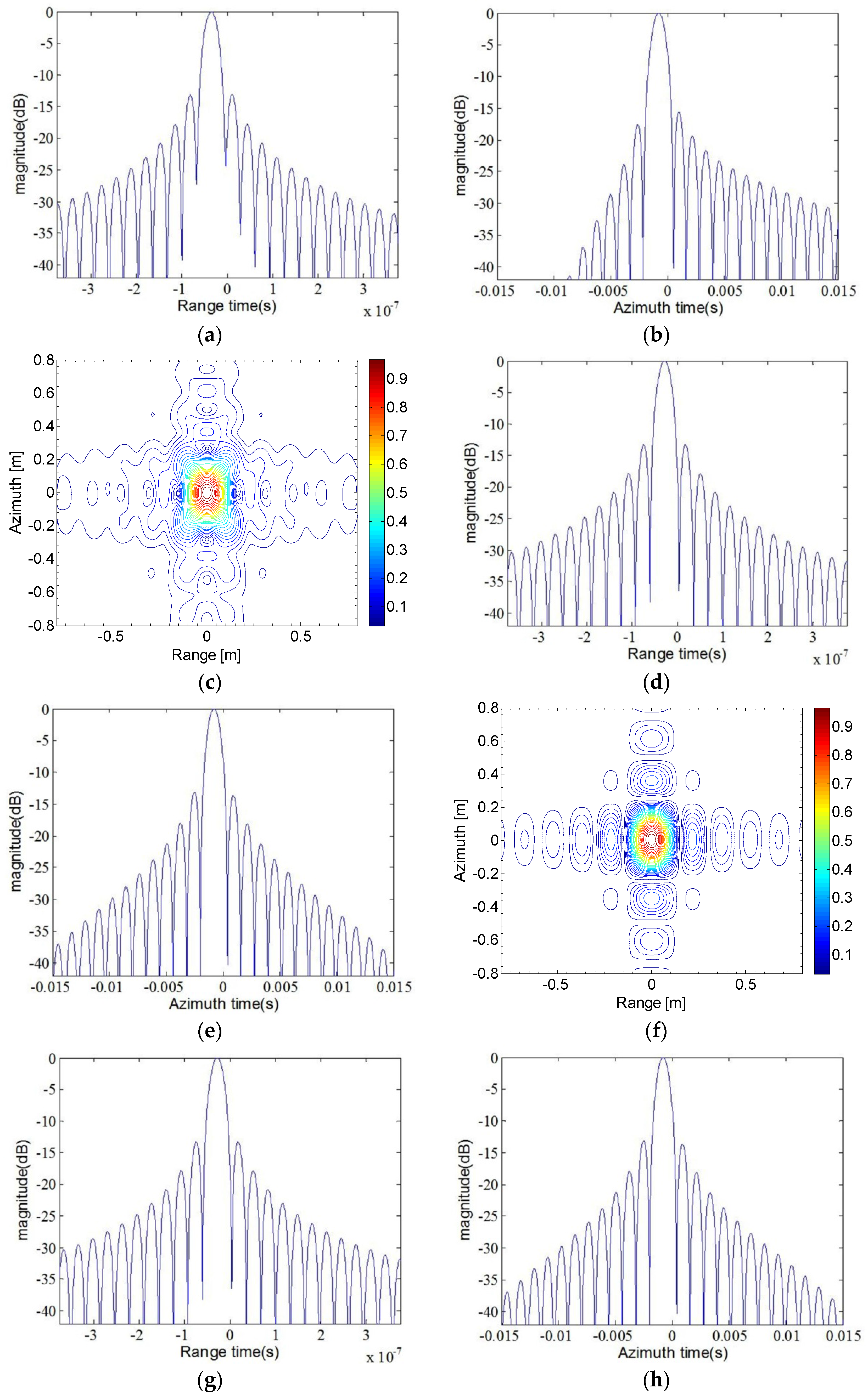
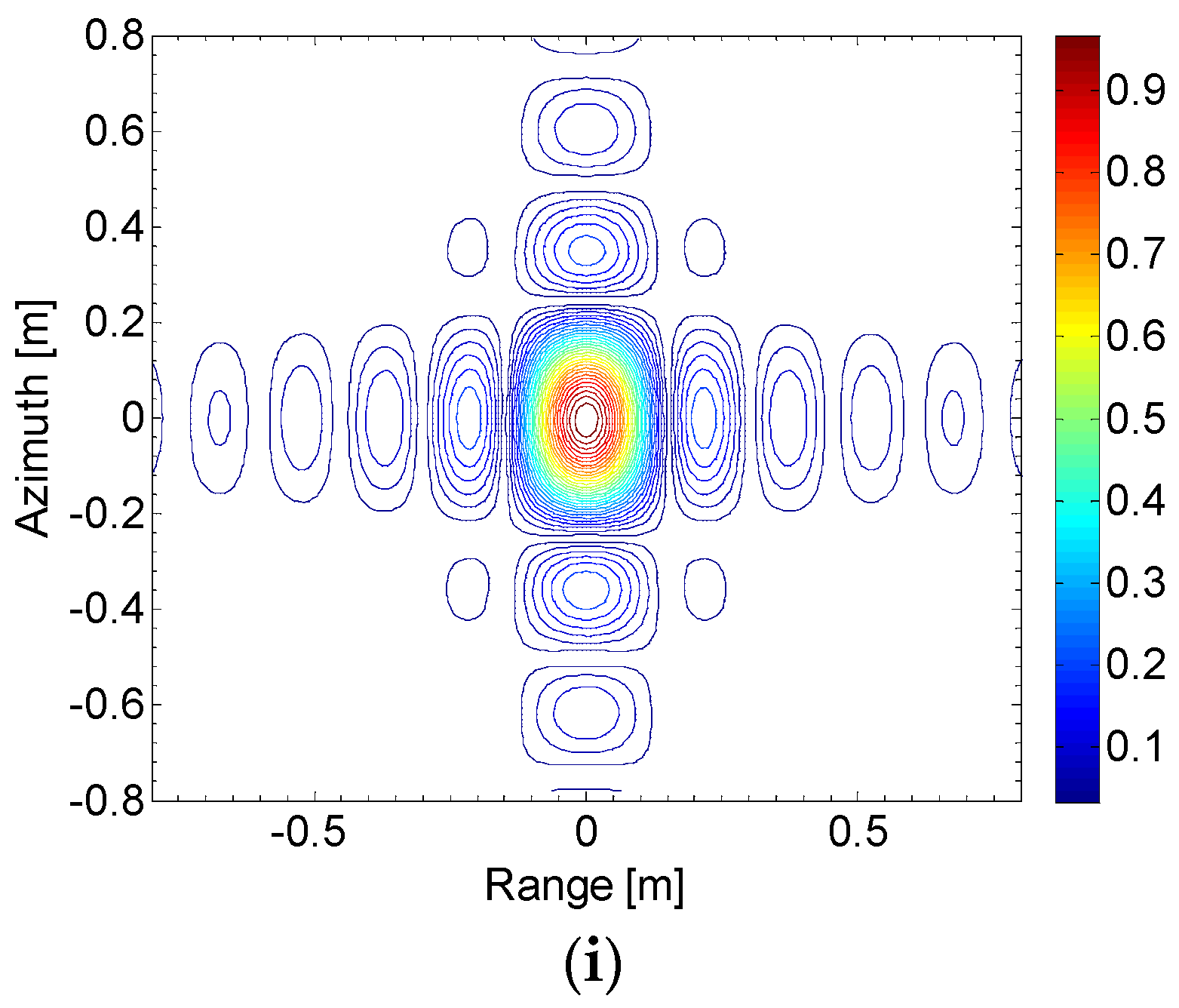
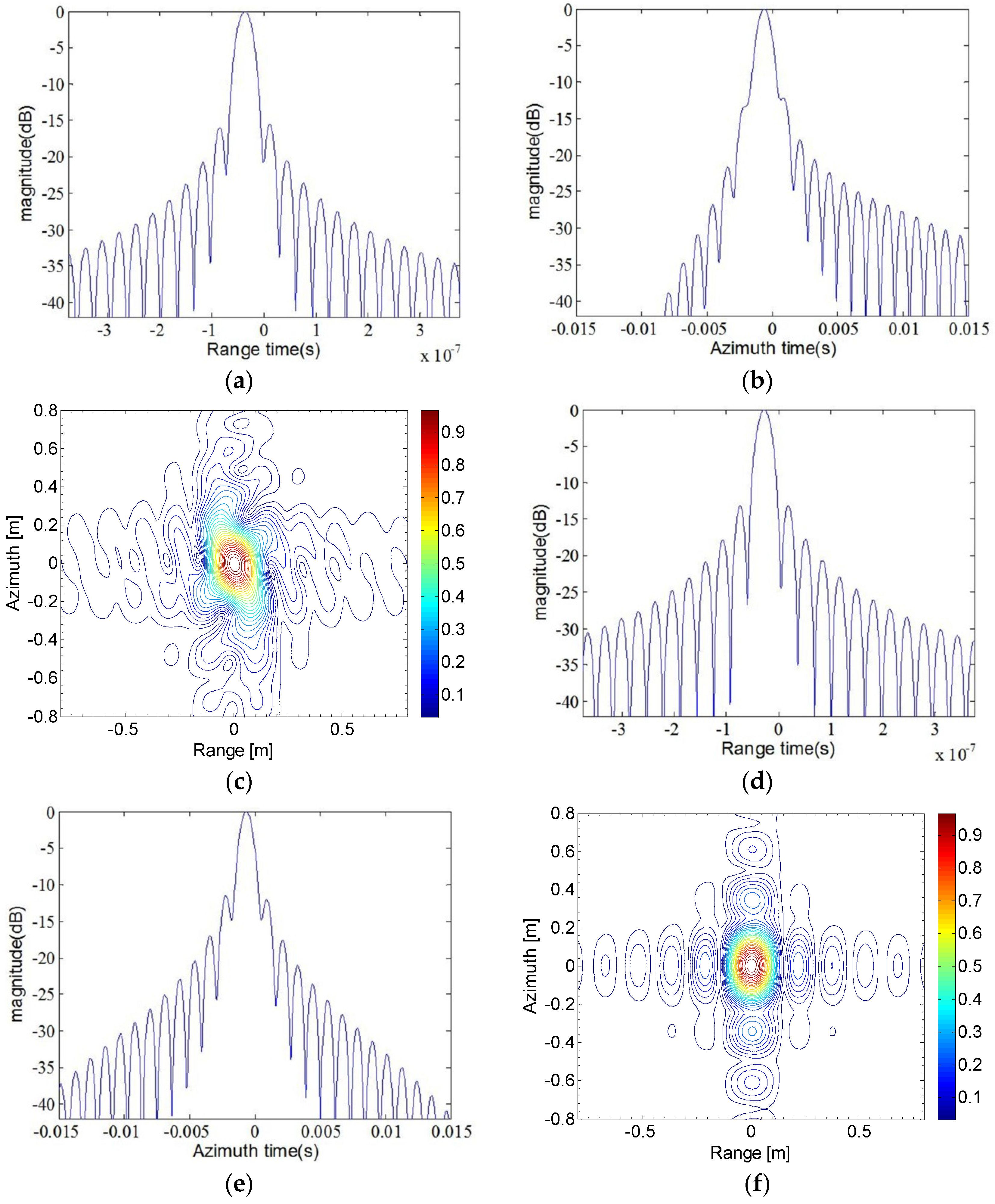
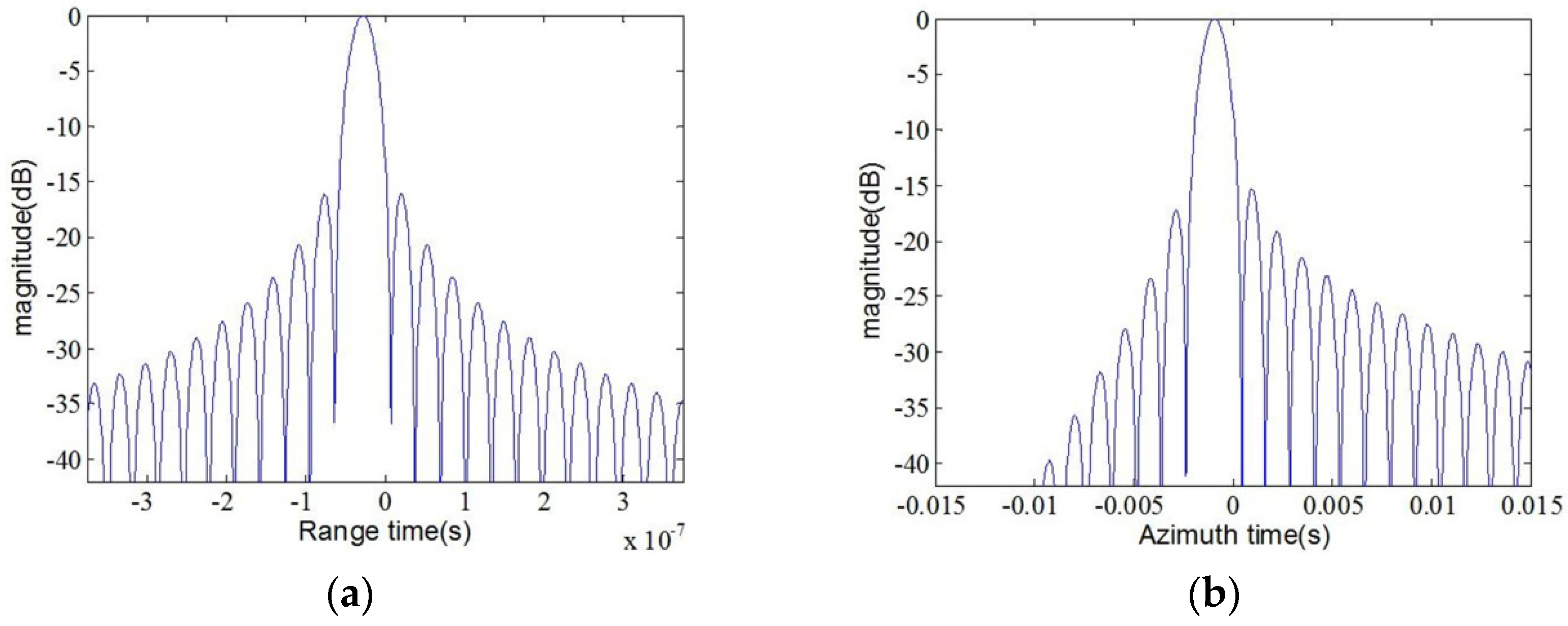
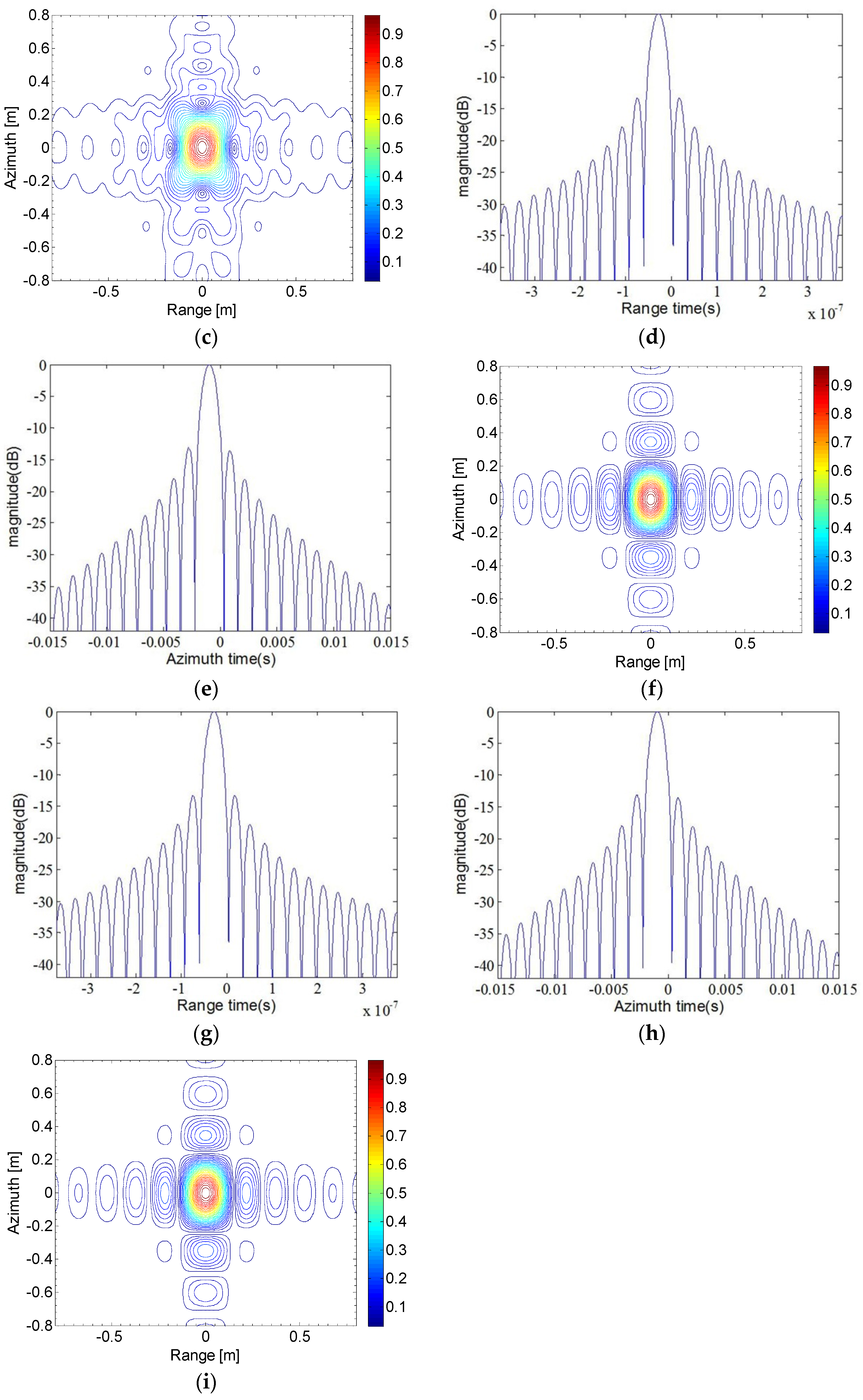
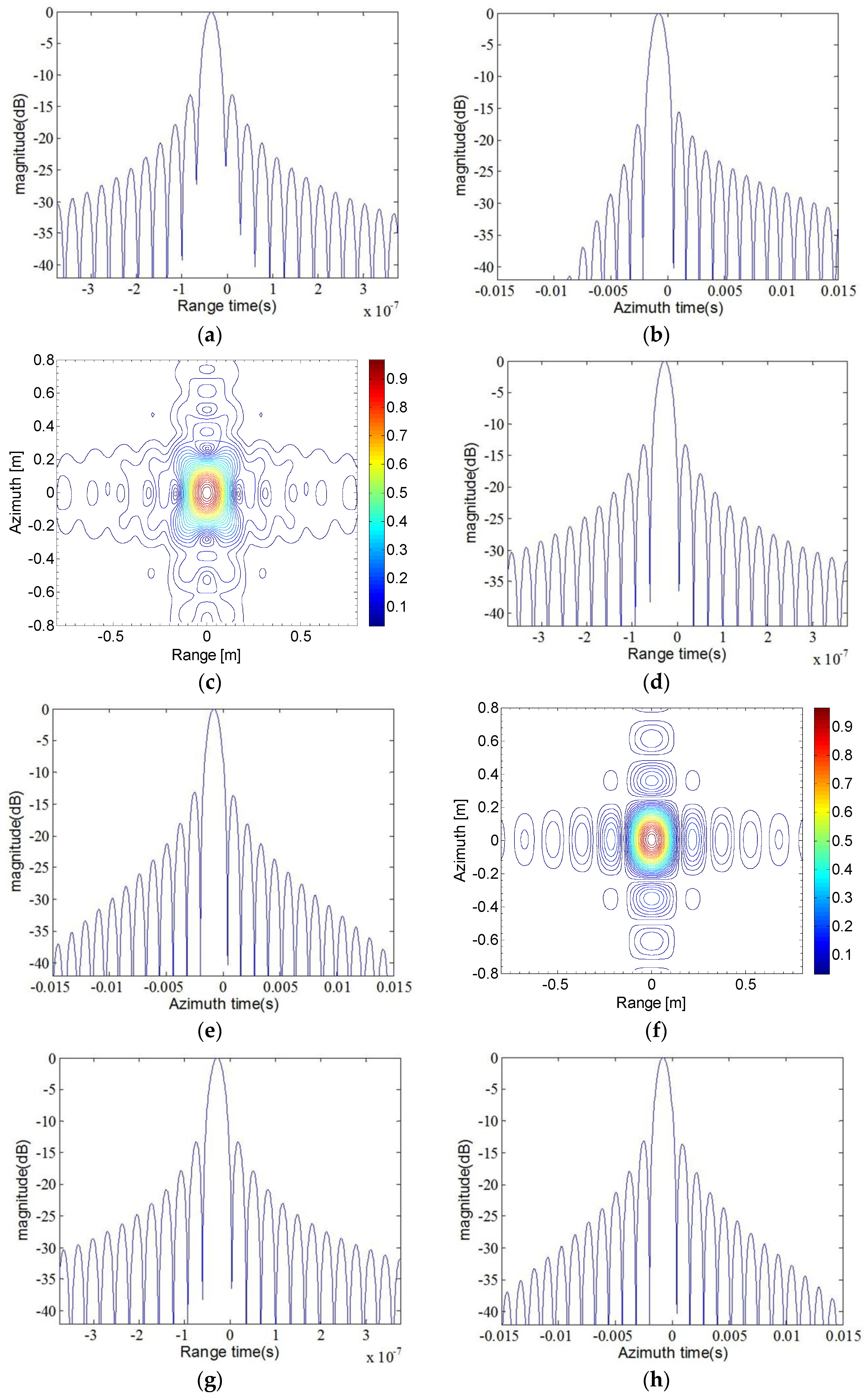
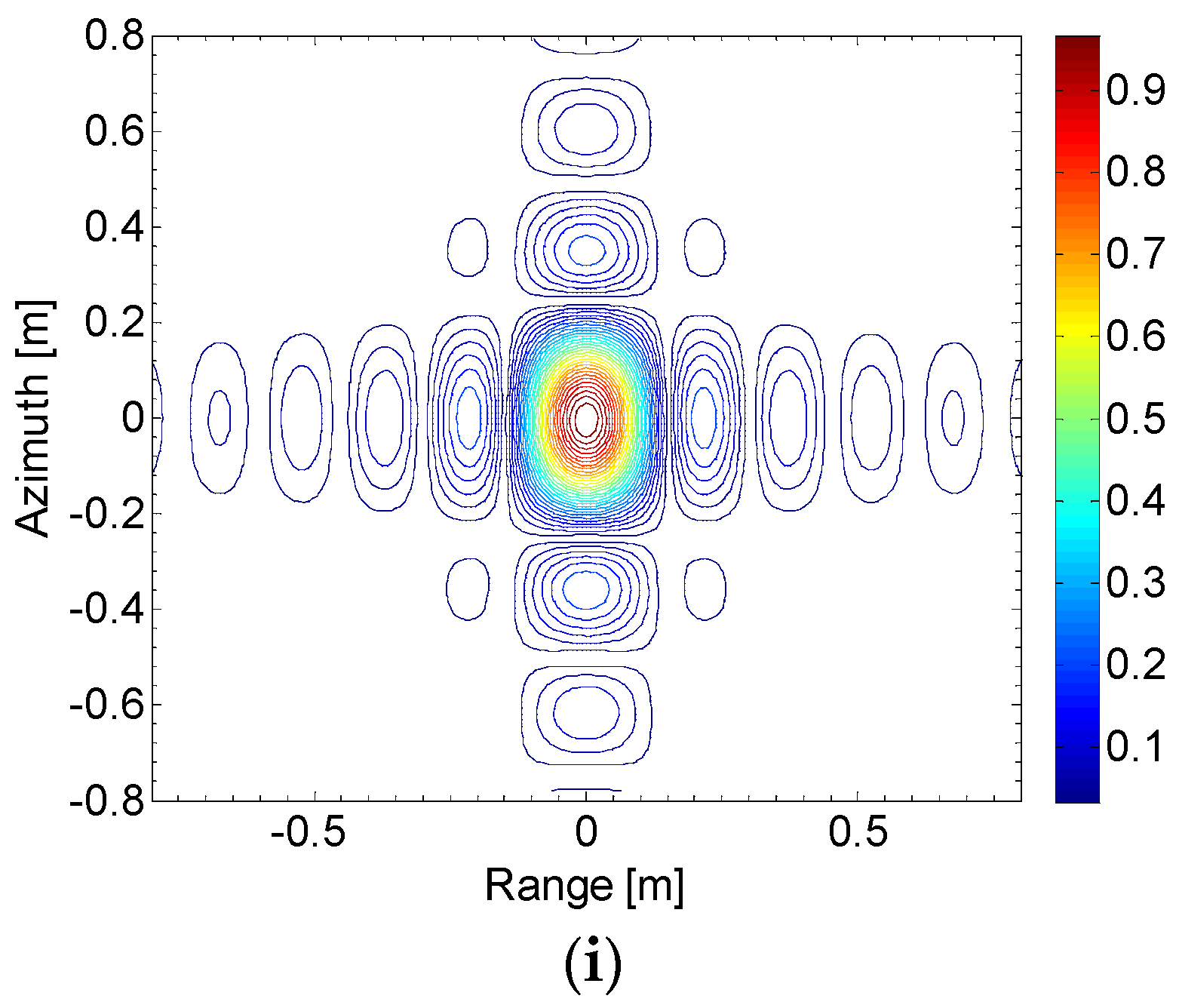
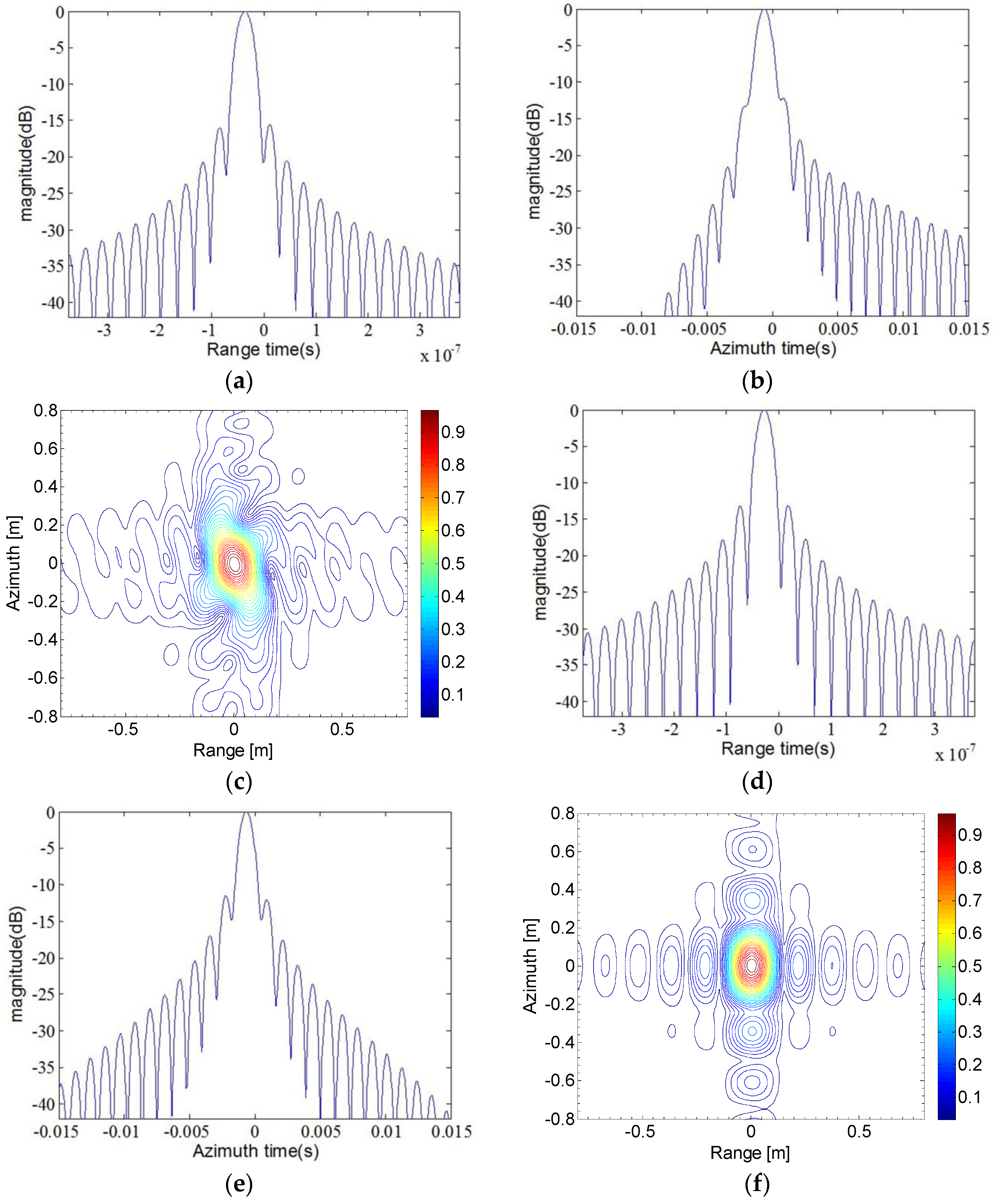
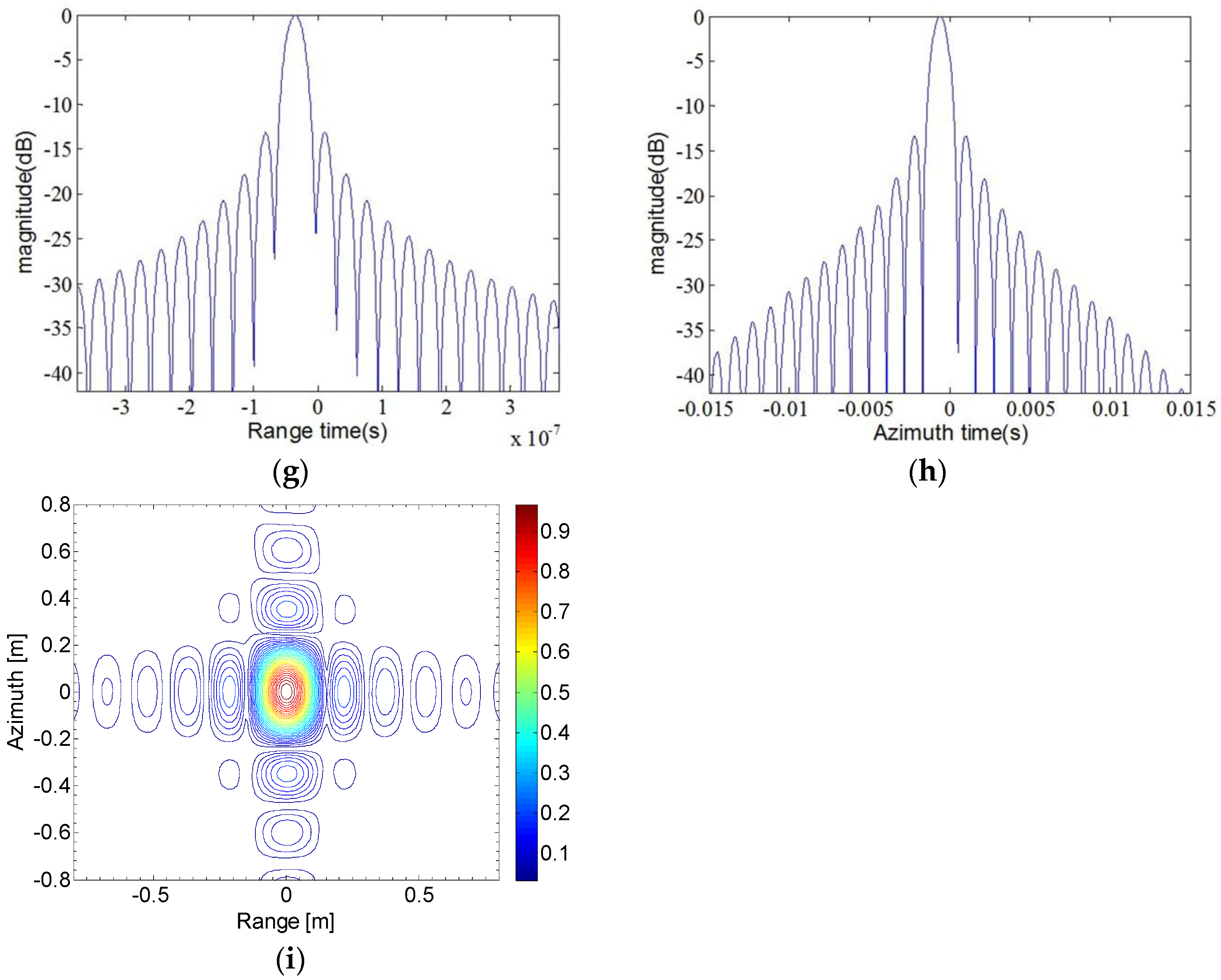
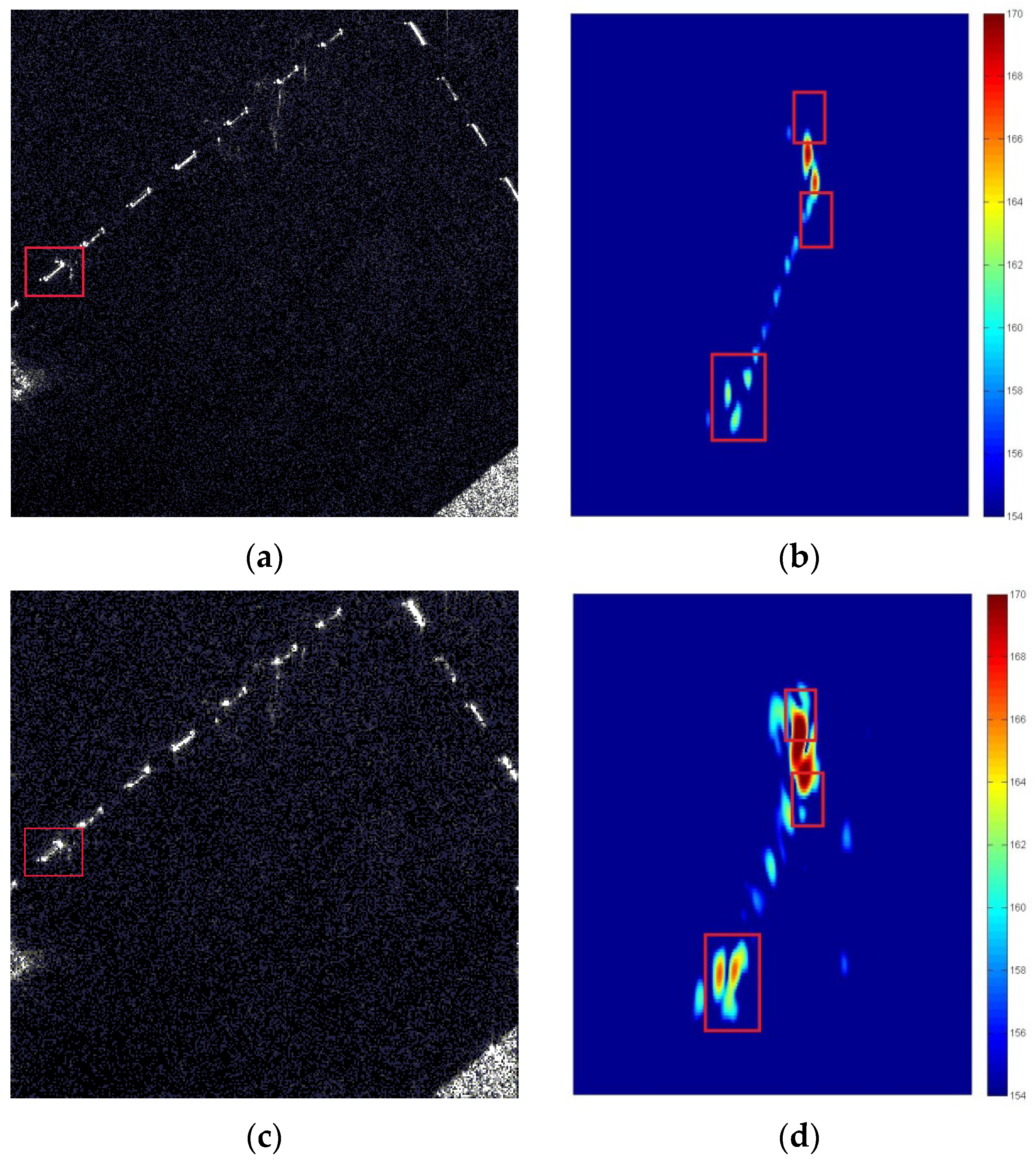
5.2. Simulation Results
5.3. Computational Load
6. Conclusions
Author Contributions
Conflicts of Interest
Appendix A
Appendix B
References
- Sadjadi, F. New comparative experiments in range migration mitigation methods using polarimetric inverse synthetic aperture radar signatures of small boats. In Proceedings of the 2014 IEEE Radar Conference, Cincinnati, OH, USA, 19–23 May 2014; pp. 613–616.
- Sadjadi, F.A. New Experiments in Inverse synthetic aperture radar image exploitation for maritime surveillance. In Proceedings of the SPIE Defense+ Security, 2014 International Society for Optics and Photonics, Baltimore, MD, USA, 5–9 May 2014; pp. 909009:1–909009:09.
- Wang, W.Q.; Jiang, D. Integrated wireless sensor systems via near-space and satellite platforms: A review. IEEE Sens. J. 2014, 14, 3903–3914. [Google Scholar] [CrossRef]
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House: Norwood, MA, USA, 2005. [Google Scholar]
- Curlander, J.; McDonough, R. Synthetic Aperture Radar: Systems and Signal Processing; John Wiley & Sons: New York, NY, USA, 1991. [Google Scholar]
- Lim, B.G.; Woo, J.C.; Lee, H.Y.; Kim, Y.S. A Modified subpulse SAR processing procedure based on the range-doppler algorithm for synthetic wideband waveforms. Sensors 2008, 8, 8224–8236. [Google Scholar] [CrossRef]
- Bamler, R.; Breit, H.; Steinbrecher, U.; Just, D. Algorithms for X-SAR processing. In Proceedings of the International Geoscience and Remote Sensing Symposium, Tokyo, Japan, 18–21 August 1993; pp. 1589–1592.
- Wang, W.Q.; Shao, H. Azimuth-variant signal processing in high-altitude platform passive SAR with spaceborne/airborne transmitter. Remote Sens. 2013, 5, 1292–1310. [Google Scholar] [CrossRef]
- Davidson, G.W.; Cumming, I.; Ito, M.R. A chirp scaling approach for processing squint mode SAR data. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 121–133. [Google Scholar] [CrossRef]
- Janoth, J.; Gantert, S.; Schrage, T.; Kaptein, A. From TerraSAR-X towards TerraSAR next generation. In Proceedings of the 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 3–5 June 2014; pp. 1–4.
- Novak, L.M.; Benitz, G.R.; Owirka, G.J.; Bessette, L.A. ATR performance using enhanced resolution SAR, aerospace/defense sensing and controls. In Proceedings of the International Society for Optics and Photonics, Orlando, FL, USA, 10 June 1996; pp. 332–337.
- Novak, L.M.; Owirka, G.J.; Netishen, C.M. Performance of a high-resolution polarimetric SAR automatic target recognition system. Lincoln Lab. J. 1993, 6, 11–24. [Google Scholar]
- Prats-Iraola, P.; Scheiber, R.; Rodriguez-Cassola, M.; Mittermayer, J.; Wollstadt, S.; De Zan, F.; Brautigam, B.; Schwerdt, M.; Reigber, A.; Moreira, A. On the processing of very high resolution spaceborne SAR data. IEEE Trans. Geosci. Remote Sen. 2014, 52, 6003–6016. [Google Scholar] [CrossRef]
- Mittermayer, J.; Wollstadt, S.; Prats-Iraola, P.; Scheiber, R. The TerraSAR-X staring spotlight mode concept. IEEE Trans. Geosci. Remote Sen. 2014, 52, 3695–3706. [Google Scholar] [CrossRef]
- Liu, Y.; Xing, M.; Sun, G.; Lv, X.; Bao, Z.; Hong, W.; Wu, Y. Echo model analyses and imaging algorithm for high-resolution SAR on high-speed platform. IEEE Trans. Geosci. Remote Sens. 2012, 50, 933–950. [Google Scholar] [CrossRef]
- Meta, A.; Hoogeboom, P.; Ligthart, L.P. Signal processing for FMCW SAR. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3519–3532. [Google Scholar] [CrossRef]
- Ribalta, A. Time-domain reconstruction algorithms for FMCW-SAR. IEEE Geosci. Remote Sens. Lett. 2011, 8, 396–400. [Google Scholar] [CrossRef]
- Teng, L.; Wu, J.; Huang, Y.; Yang, J. A deramping based Omega-k algorithm for wide scene spotlight SAR. In Proceedings of the International Conference on Systems and Informatics, Yantai, China, 18–20 May 2012; pp. 2089–2092.
- Carrara, W.G.; Goodman, R.S.; Majewski, R.M. Spotlight Synthetic Aperture Radar: Signal Processing Algorithms; Artech House: Norwood, MA, USA, 1995. [Google Scholar]
- Mittermayer, J.; Moreira, A.; Loffeld, O. Spotlight SAR data processing using the frequency scaling algorithm. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2198–2214. [Google Scholar] [CrossRef]
- Wang, G.D. A deramp chirp scaling algorithm for processing spaceborne spotlight SAR data. In Proceedings of the ICMMT 4th International Conference on Microwave and Millimeter Wave Technology, Beijing, China, 18–21 August 2004; pp. 659–663.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Orbital inclination | 98.06° |
| Orbital height | 680 km |
| Eccentricity | 0.001 |
| Elevation angle | 35 ° |
| Squint angle | ±6.21 ° |
| Beam rotation velocity | 0.42 °/s |
| Bandwidth | 1.0 GHz |
| Wavelength | 0.03 m |
| Parameters | Value |
|---|---|
| Orbital inclination | 98.06° |
| Orbital height | 680 km |
| Eccentricity | 0.001 |
| Elevation angle | 35° |
| Wavelength | 0.03 m |
| Beam width (Azimuth) | 0.305° |
| Squint angle | ±6.21° |
| Beam rotation velocity | 0.42°/s |
| Signal bandwidth | 1.0 GHz |
| Pulse width | 40 μs |
| Pulse repetition frequency | 4000 Hz |
| Motion Model | Target | Resolution (m) | PSLR (dB) | ISLR (dB) |
|---|---|---|---|---|
| Stop-go model | P1 | 0.1444 | −16.49 | −13.54 |
| P2 | 0.1433 | −16.10 | −13.10 | |
| P3 | 0.1444 | −15.42 | −12.51 | |
| Continuous rectilinear model | P1 | 0.1342 | −13.25 | −9.96 |
| P2 | 0.1342 | −13.26 | −9.96 | |
| P3 | 0.1342 | −13.05 | −9.77 | |
| Continuous tangent model | P1 | 0.1342 | −13.25 | −9.96 |
| P2 | 0.1342 | −13.25 | −9.95 | |
| P3 | 0.1342 | −13.13 | −9.80 |
| Motion Model | Target | Resolution (m) | PSLR (dB) | ISLR (dB) |
|---|---|---|---|---|
| Stop-go model | P1 | 0.2333 | −15.64 | −13.35 |
| P2 | 0.2350 | −15.29 | −13.05 | |
| P3 | 0.2420 | −11.98 | −9.79 | |
| Continuous rectilinear model | P1 | 0.2156 | −13.07 | −10.39 |
| P2 | 0.2203 | −13.11 | −10.40 | |
| P3 | 0.2250 | −11.53 | −8.63 | |
| Continuous tangent model | P1 | 0.2156 | −13.08 | −10.39 |
| P2 | 0.2203 | −13.11 | −10.41 | |
| P3 | 0.2170 | −13.32 | −10.41 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Z.; Wang, S.; Li, Z. An Imaging Compensation Algorithm for Spaceborne High-Resolution SAR Based on a Continuous Tangent Motion Model. Remote Sens. 2016, 8, 223. https://doi.org/10.3390/rs8030223
Yu Z, Wang S, Li Z. An Imaging Compensation Algorithm for Spaceborne High-Resolution SAR Based on a Continuous Tangent Motion Model. Remote Sensing. 2016; 8(3):223. https://doi.org/10.3390/rs8030223
Chicago/Turabian StyleYu, Ze, Shusen Wang, and Zhou Li. 2016. "An Imaging Compensation Algorithm for Spaceborne High-Resolution SAR Based on a Continuous Tangent Motion Model" Remote Sensing 8, no. 3: 223. https://doi.org/10.3390/rs8030223