1. Introduction
Urbanization has a significant effect on the ecosystem components and is a key factor in global environmental change [
1]. The expansion of urbanization is a response to world population growth and its consequences involve the transformation of natural forms of land cover into urban areas [
2]. The world population has rapidly increased from 244 million in 1900 to 7 billion in 2011 and is expected to exceed 9.3 billion by 2050 [
3]. Most of the population growth will occur in the urban areas [
4] and most of the net increase will be in the cities of developing countries [
4]. Human developments in urban areas have resulted in a serious modification of and threat to the landscape’s ecosystem and natural diversity [
5,
6], and cause changes in the ecological and environmental components [
7]. Measuring past spatiotemporal dynamics of urban cover and predicting patterns of future change can provide much needed information for planners and resource managers to enable sustainable development that takes into account the management of natural resources and environmental conservation.
Remote sensing data and methods provide the essential information regarding identifying, mapping, assessing, monitoring and modelling the spatial, temporal and thematic scales of various land cover features [
8,
9], including urban growth [
10,
11]. The spatial time-series data provided by Remote Sensing (RS) systems serve as an excellent source to analyse and quantify the changes over time in different urban cover and other land cover types. The repetitive coverage, cost effectiveness and accessibility of RS data offer great potential in terms of identifying and modelling long-term urban changes [
12,
13,
14]. A number of studies have utilized bi-temporal RS data to detect the spatial patterns and overall rate of urban cover change for selected periods of time. For instance, Rahman [
15] detected urban land use in eastern coastal city of Al-Khobar, Saudi Arabia between 1990 and 2013 using maximum likelihood classification (MLC) and ISODATA methods to classify Landsat TM, ETM+ and OLI data. Similarly, Pellikka and Alshaikh [
16] utilized Landsat TM and ETM+ to map LULC changes and built-up area in Al-Baha southwestern Saudi Arabia between 1984 and 2014 using MLC method. While considerable efforts were made to provide accurate information related to the rate and patterns of urban growth, understanding and quantifying the transition patterns are essential in order to determine the direction and magnitude of urban growth predicted to occur in the future. Given the availability of RS data and the capabilities of different land cover modelling techniques, accurate extraction of past urban cover information allows us to model the change trajectories of urban cover and other land cover types.
Modelling land cover changes requires accurate extraction of both historical and current land-use and land-cover (LULC) information [
17], which allow models to evaluate past scenarios and predict future changes. A wide variety of remote sensing methods have been developed and used to extract LULC change information from satellite data. Pixel-based image analysis methods are the most widely used to derive LULC maps [
18,
19,
20]. Recently, object-based image analysis (OBIA) has gained an acceptance among different RS applications and has received a great attention in image classification [
21,
22,
23]. The OBIA method has advantages of including contextual information into the classification process, which can effectively reduce the “salt and pepper” effect and improve the classification accuracy compared to pixel-based classification methods [
21,
23,
24,
25].
OBIA technique has been successfully implemented on Landsat images and provided accurate classification for LULC changes in the previous studies. For example, Taubenböck, et al. [
26] utilized OBIA technique to monitor urban expansion in 28 mega cities throughout the world using Landsat images. Yu, et al. [
23] used OBIA technique and Landsat TM data to classify LULC changes in Beijing, China. Platt, et al. [
27] concluded that OBIA classification yielded high average class accuracies compared to traditional pixel-based approaches. For this propose, OBIA and updated classification approaches are utilized to accurately classify LULC changes which are then used as input for the simulation model.
Urban expansion is a dynamic and complex process that involves a number of social, environmental, institutional and economic processes [
28] and, therefore, modelling urban dynamics with these driving factors is a challenging task [
29]. The role of these factors is defined and then included in the transition rules for the modelling of urban development [
30]. In the past, a wide variety of approaches and methods have been applied to model the dynamics of urban cover change and its driving factors [
31,
32,
33,
34,
35,
36,
37,
38]. Integrating the Markov chain (MC) and cellular automata (CA) techniques has been found to be a suitable approach through which to simulate the spatiotemporal changes in urban cover [
2,
39,
40,
41].
The basic assumption of MC model is that the LULC changes are stochastic processes in which different categories of LULC are states of a chain [
42,
43]. The definition of chain is as a stochastic process, where the value of the process at time
t,
Xt, only depends on its value at time
t − 1,
Xt−1 and is not dependent on the sequence of values
Xt−2,
Xt−3,…
X0, which the process passed through before arriving at
Xt−1. The expression of chain can be as:
The
is known as the one-step transitional probability, which gives the probability the process that makes the transition from state
Ai to
Aj in one time period. The
is called the
m-steps transition probability,
when
m-steps are required to implement this transition [
42]. The MC is said to be homogeneous if the
is independent of time and dependent only upon states
Ai,
Aj and
m. The use of MC treatment in this study will be limited to the first order homogenous and in this case:
where
Pij can be estimated from observed data by tabulating the number of times the observed data went from state
i to
j and summing the number of times that state
Ai occurred.
There are three issues arising where the observed changes violate the assumption of a first order Markov model. Non-stationarity, spatial dependencies and historical matters limit the success of the first order MC due to dynamics of LULC change (more information can be found in [
43]). The non-stationarity can be solved by limiting the time span of the historical LULC changes to be short between
t − 1 and
t − 2 [
42]. The use of MC model and CA can resolve the spatial dependencies by combining the concept of MC, CA, Multi-Criteria Evaluation (MCE) and Multi-Objective Land Allocation (MOLA) [
35,
43,
44]. The CA model, hence, controls the spatial patterns of LULC classes through the local rules that are determined by either the neighbourhood configuration or by the transition potential maps [
2,
45,
46]. Thus, integration of MC–CA models gives the opportunity to use the power of both methods to model the dynamics of urban growth. Although the simulation of urban cover using the MC–CA integrated model has been improved in previous research [
2,
39,
41], only a few studies have conducted a comparative study of the urban expansion patterns for different landscapes.
In this research, an integration of time-series satellite images and MC–CA models has been conducted to identify and analyse the patterns of urban expansion in the fast-growing cities of Saudi Arabia. The main aim of this study is to assess the amount and pattern of urban growth in the present and in the past, using RS data between 1985 and 2014 in five Saudi Arabian cities (Riyadh, Jeddah, Makkah, Al-Taif and the Eastern Area). The pattern of LULC in time-series is then used to predict urban growth change scenarios. The objectives of this research are: (1) Urban LULC classification of different change years (1985, 1990, 2000, 2007 and 2014) using OBIA technique for the selected cities; (2) analysis and comparison of the spatiotemporal patterns of LULC changes in relation to urban expansion; (3) determination of transition probabilities of other LULC classes changing to urban area and simulating of changes using MC-CA integrated modelling approach; and (4) based on time-series simulation accuracy, determining future urban expansions for two simulated years 2024 and 2034. The results from this study will provide an overview of past and present urban pattern trends that will help planners and decision makers assess the change pattern in the past and will allow them to prepare and manage the expected future expansion of urbanization to attain sustainability in these cities.
2. Study Areas
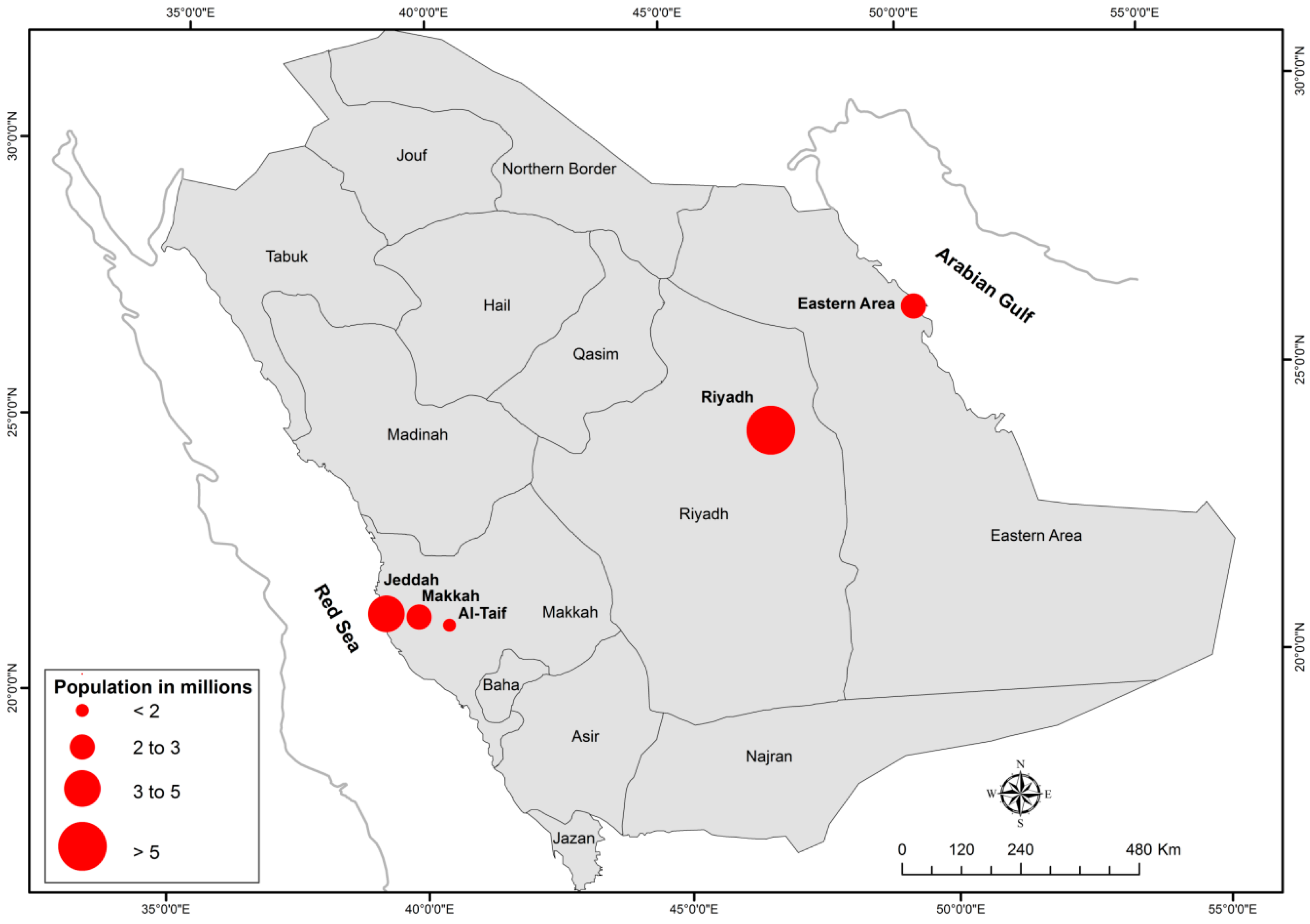
The study areas include five cities of Saudi Arabia: Riyadh, Jeddah, Makkah, Al-Taif and Eastern Area (
Figure 1). These cities are considered to be the most urbanized and populated in the country [
38]. Riyadh is the capital and largest city, situated in the central part of Saudi Arabia on the large Najd plateau. Al-Kharj city, which is 77 km south-east of Riyadh, is included in the study area. Jeddah is the largest sea port on the Red Sea coast, a major urban centre of western Saudi Arabia and an important commercial hub nationally. It is also the largest city in the western part and the second largest in the country. Makkah is the holy place of the Muslim community and is located in the central part of the region, approximately 70 km inland from Jeddah. Al-Taif, considered to be the most important tourist city of Saudi Arabia [
47], is the fourth study area in our analysis and is located in the south-east of Makkah. Eastern Area is located in eastern Saudi Arabia on the Arabian Gulf and is home to most of Saudi Arabia’s oil production. Eastern Area includes 11 towns spread across the region. Only the most populated six towns, which are Dammam, Dhahran, Al-Khobar, Al-Qatif, RasTanura and Al-Jubail, are considered for Eastern Area. Dammam city is in the central part and is the administrative city of the Eastern Area.
Table 1 lists the population of 2015 (Central Department Statistics & Information) and the importance of each city.
Most Saudi Arabian cities have faced massive urban growth recently due to an increase in national economics [
47,
48], which have been used to support the public and private sectors to increase development across the country. The government policy with the natural demographic growth has led to massive changes and increased complexity in the structure of the cities as well as unsystematic development in the last three decades. Migration from the rural to urban centres, for job opportunities, has led to a significant increase in population in these cities. For example, the populations in large cities, such as Riyadh and Jeddah, have increased by 4.6 and 3.0 million respectively between 1985 and 2014 (Central Department Statistics & Information 2015). With such rapid population growth, local authorities and planners face a significant challenge to meet the infrastructure demand and to understand the urban growth process and associated consequences [
49]. Therefore, it is important to understand the past and present spatial dimensions for management and for preparing for the future expansion in these cities. Understanding the urban growth process and its patterns is essential to secure sustainable development for future urban growth and to avoid unwanted and negative environmental and ecological consequences.
5. Discussion
Modelling LULC changes and urban growth is crucial for environmental and ecological management and for enabling a better understanding of future land use changes. Most Saudi Arabian cities have faced massive urban growth in the past. The five cities included in this research showed a highly urbanized growth rate between 1985 and 2014. This massive growth has resulted in complex structures and huge increases in the transportation networks across all five cities, leading to environmental changes and major modifications to the natural landscape [
15]. The rapid urbanization in Saudi Arabian cities has also led to an increase in natural hazards, such as increasing desertification and land degradation, water scarcity and habitat/species loss [
68]. More recently, flash flooding hazards have become a serious issue and have caused human death and damages to urban infrastructure in most of Saudi Arabian cities [
69,
70]. Past land cover patterns and the direction of future changes suggest that urban growth will increase in the same areas, which may add more pressure to the sensitive environments in the five cities in Saudi Arabia.
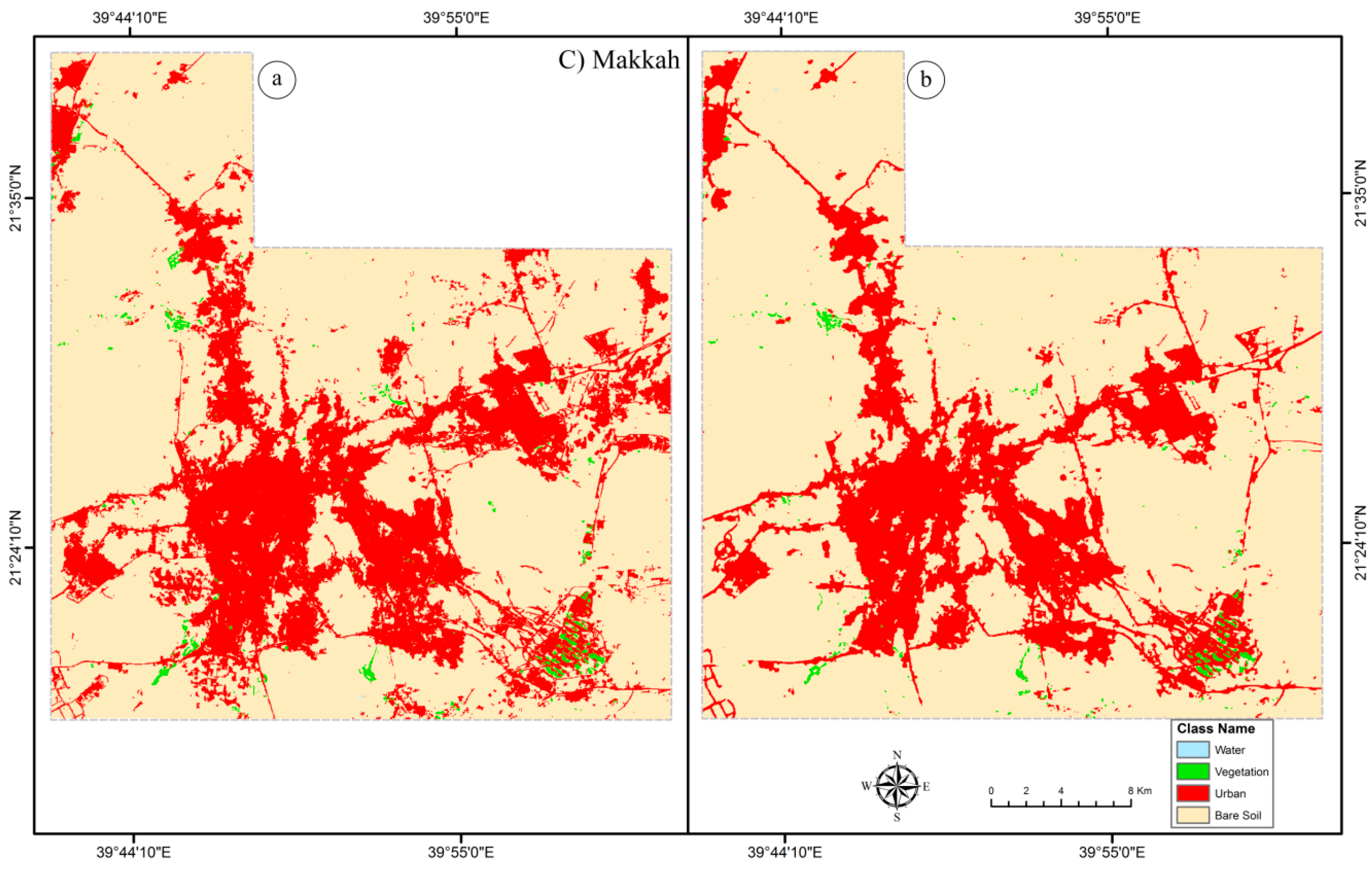
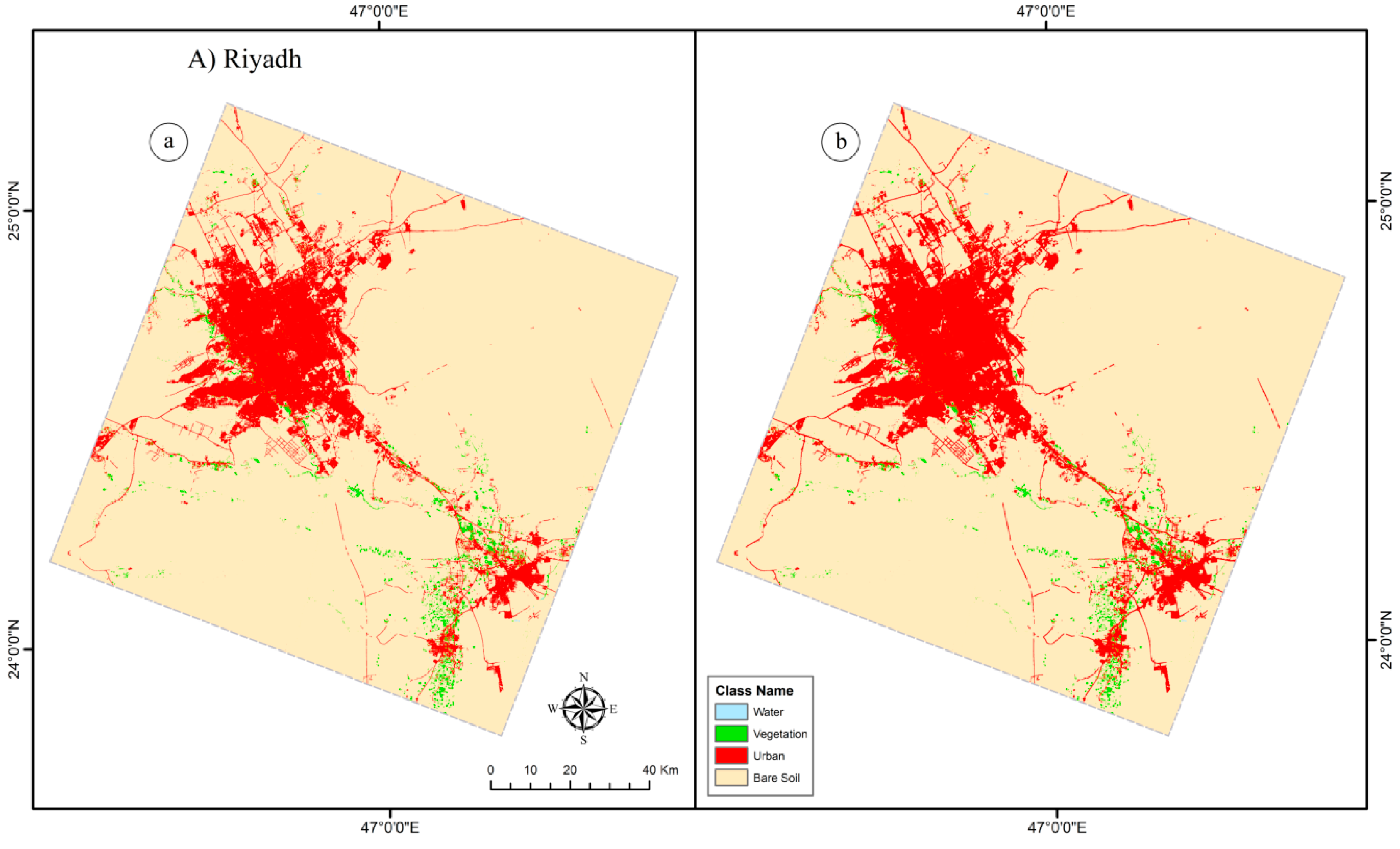
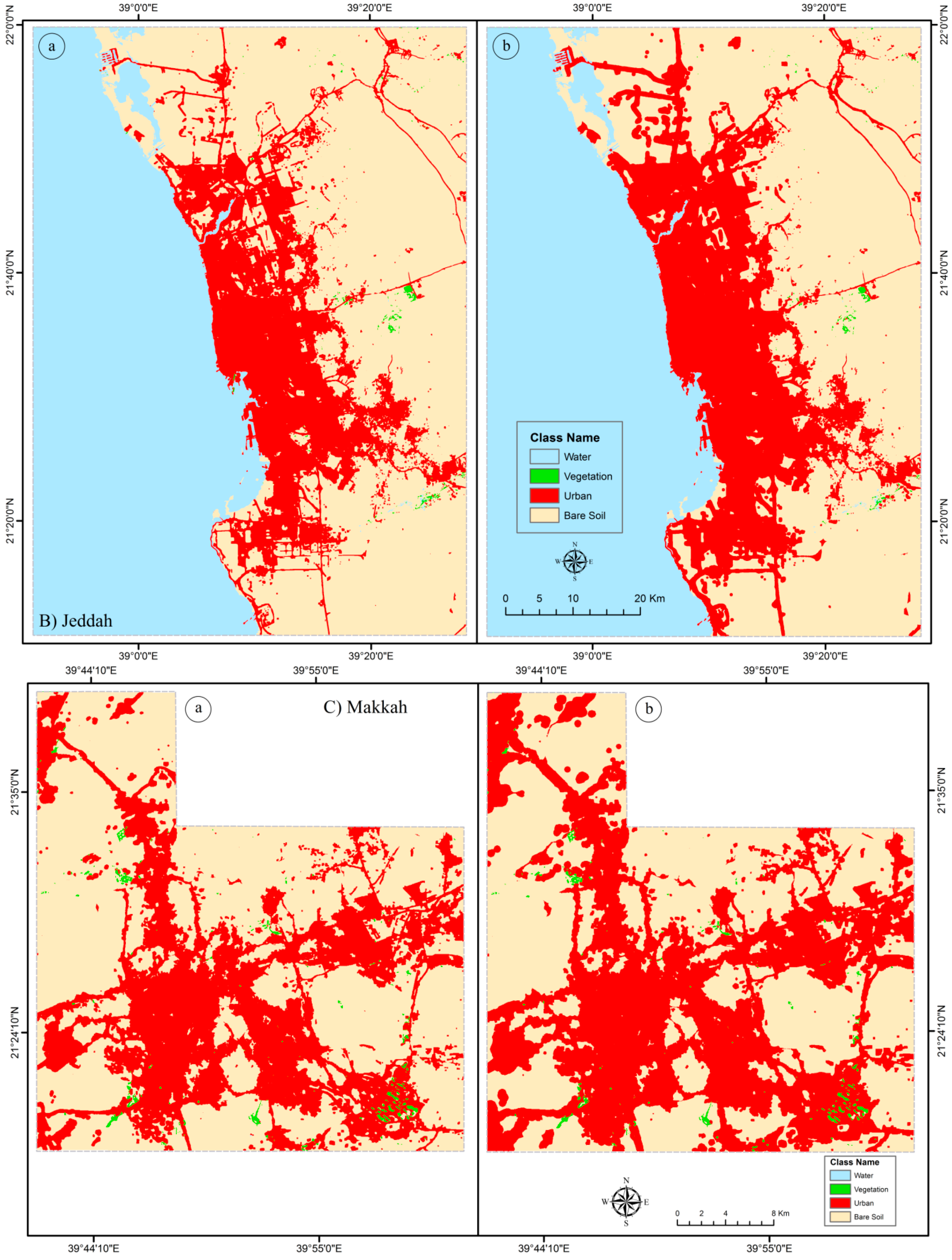
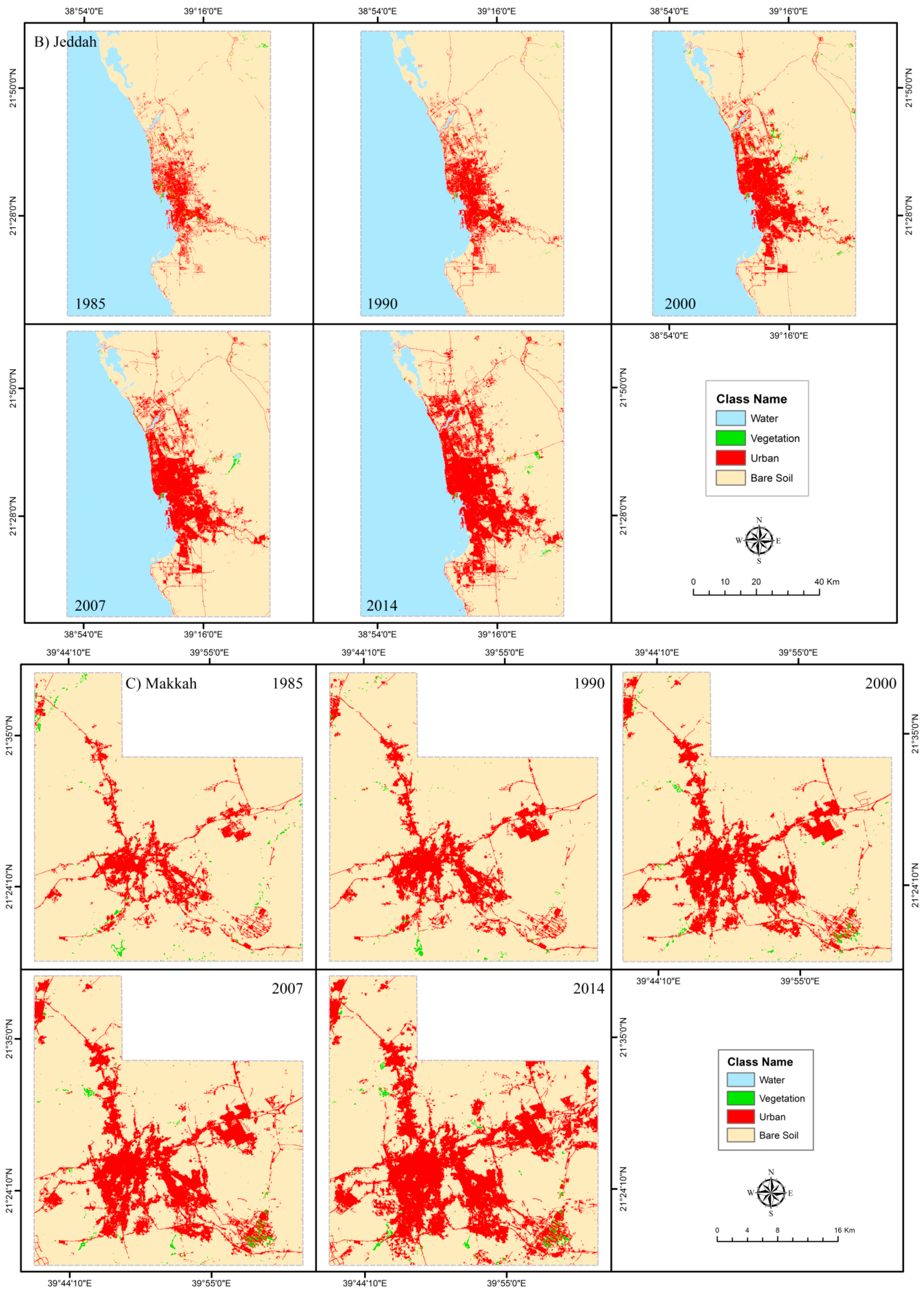
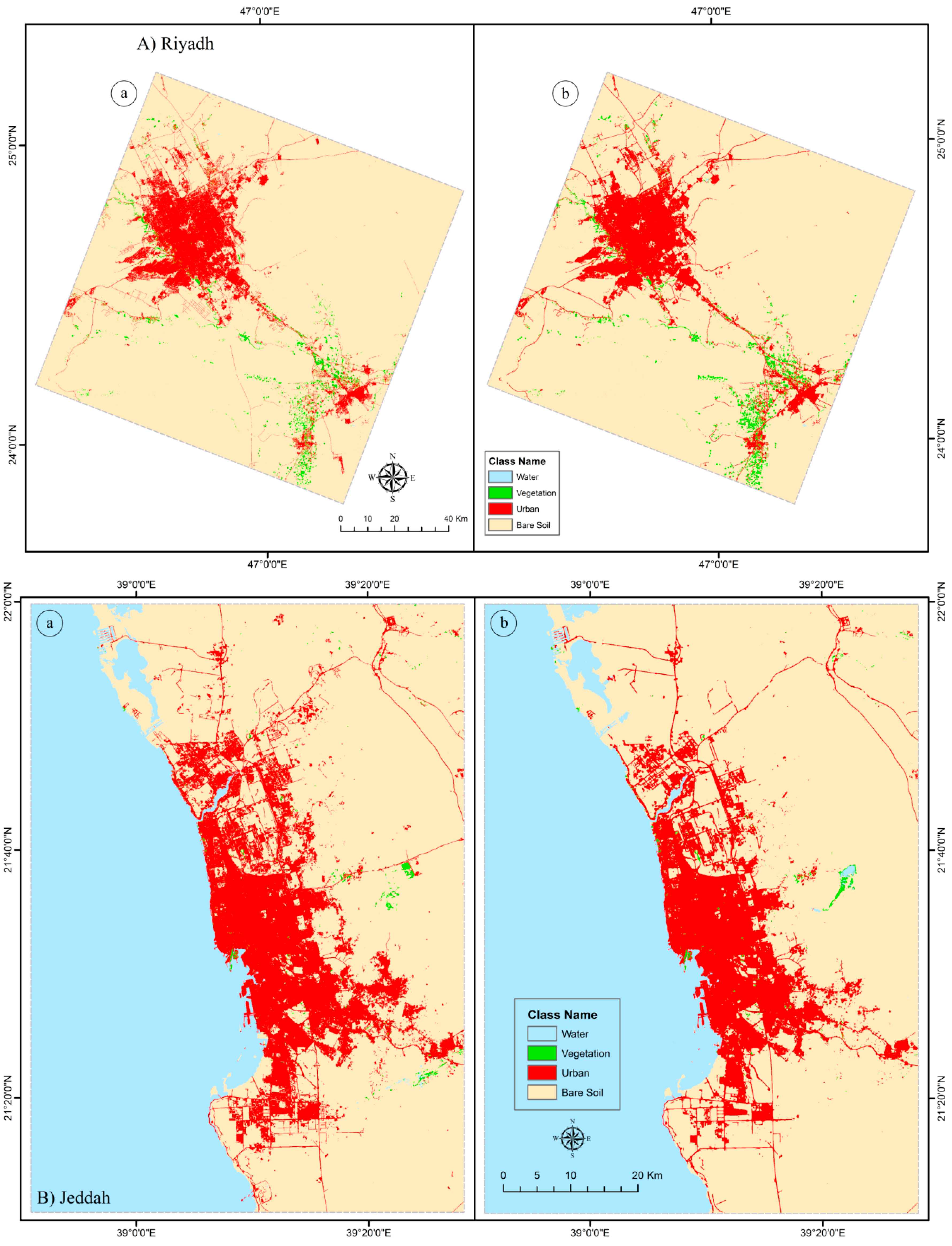
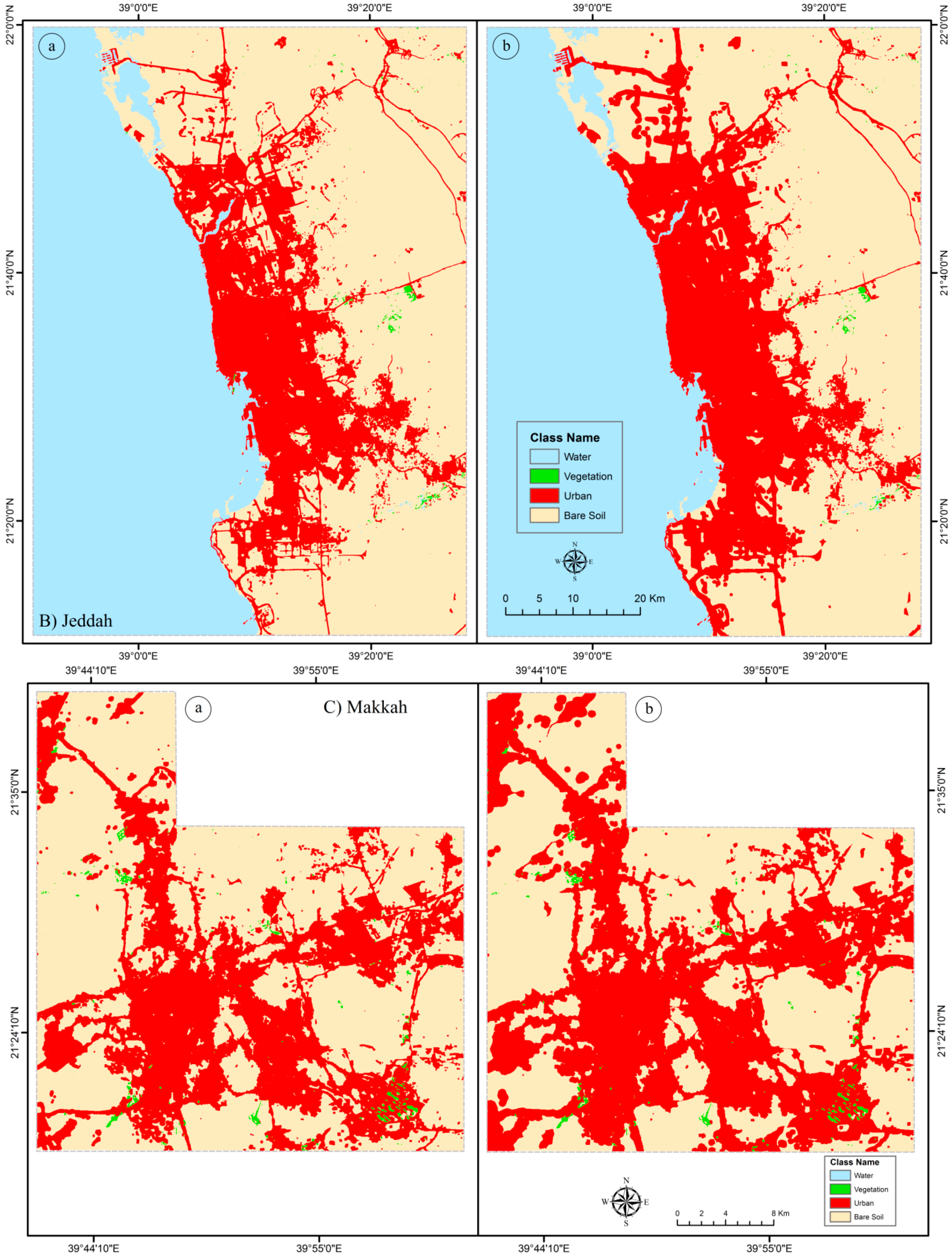
The transition matrix results showed a variation in the conversion from different land cover classes (W, VC and BS) to UA with BS being the most highly converted type of land. This is because BS is the most dominant land type in all the five cities. Although there has been a considerable transition (in terms of area) from VC into UA in almost all of the cities, the conversion of land from VC to BS was higher than the conversion to urbanization. For instance, the transition probability for VC to BS was 93% for the 2000 projection (1985–1990), while the percentage for the transition probability value in terms of UA was only 1%. Similarly, VC is likely to be converted to BS (62%) and to UA (6%) for the 2024 projection (2007–2014). For a desert environment, this is reasonable, as the variations in vegetation abundance is due to erratic rainfall and rising temperatures in these cities. A similar condition applies to W in Riyadh, Makkah and Al-Taif, which showed considerable transition into other land cover uses, except for the sea areas in Jeddah and the Eastern Area.
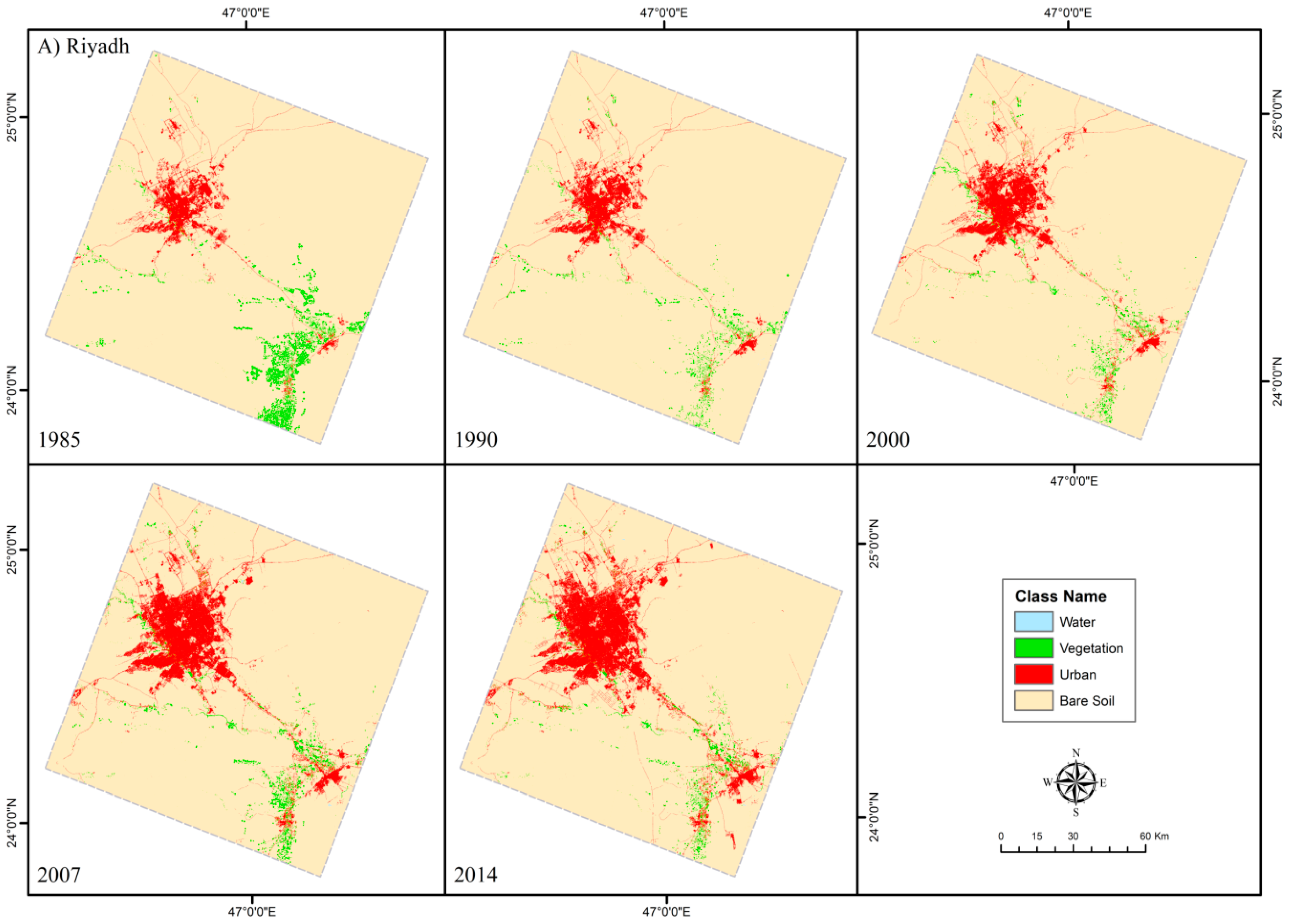
The results indicate that urban cover was the most developed type of land use among the other land cover features between 1985 and 2014. Similarly in other parts of the world, Dewan and Yamaguchi [
71] found that built-up area in Dhaka, Bangladesh was the most expandable land cover type between 1975 and 2003. In Saudi Arabia, Pellikka and Alshaikh [
16] showed that urban build-up area was the major changed land cover among other LULC areas between 1984 and 2014 in Al-Baha, Saudi Arabia. The major issue in most of Saudi Arabian cities is that the new development areas are developed wherever vacant lands are available and less expensive. This is due to limitation to apply a master plan that keeps the development within the urban boundaries. As this action may create problems for researchers and planners and lead the growth to be faster than the simulated results using historical data, the simulation results presented in this study should provide the essential information of the future development and provide an overview for the future scenarios in the selected cities.
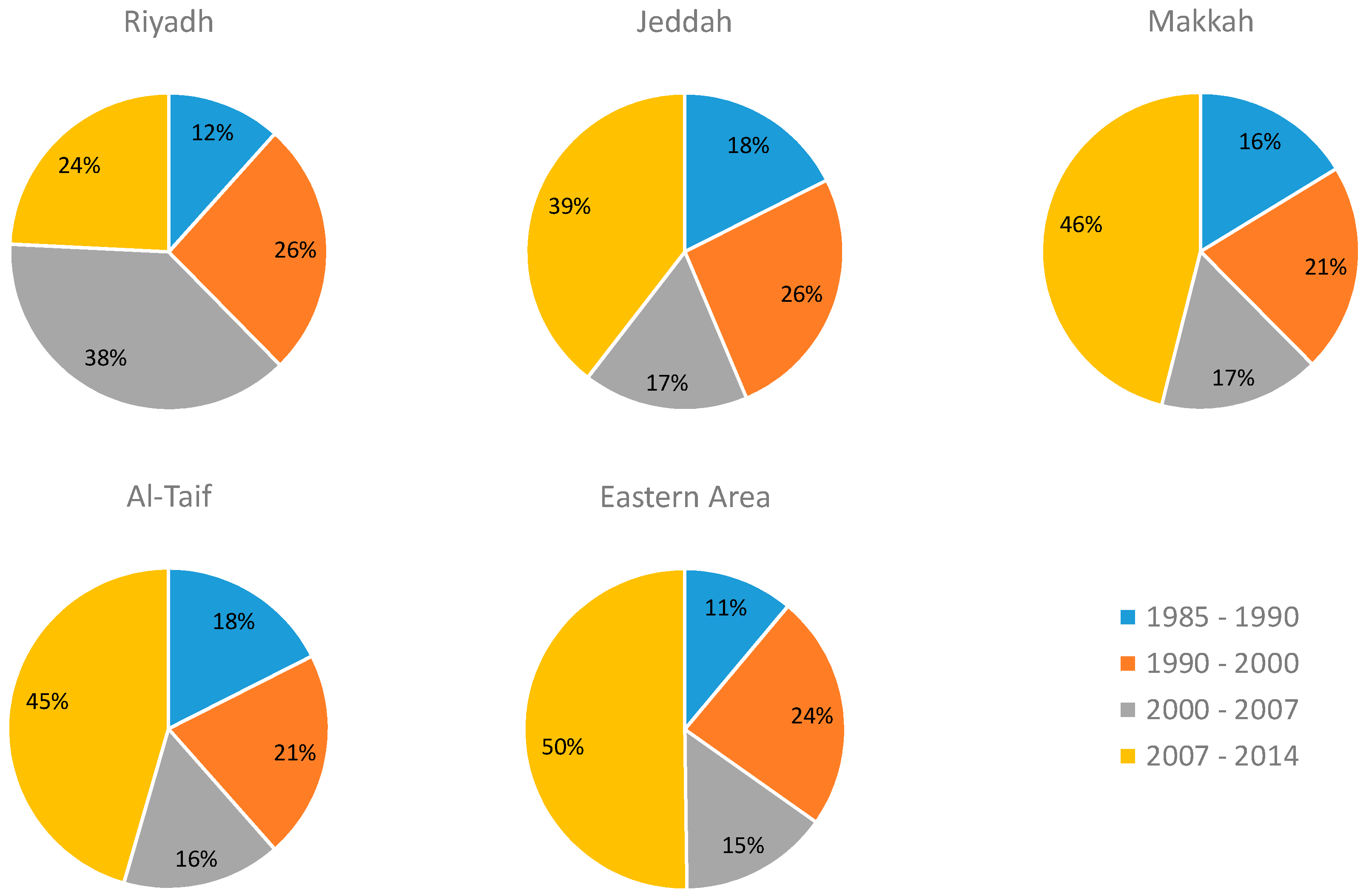
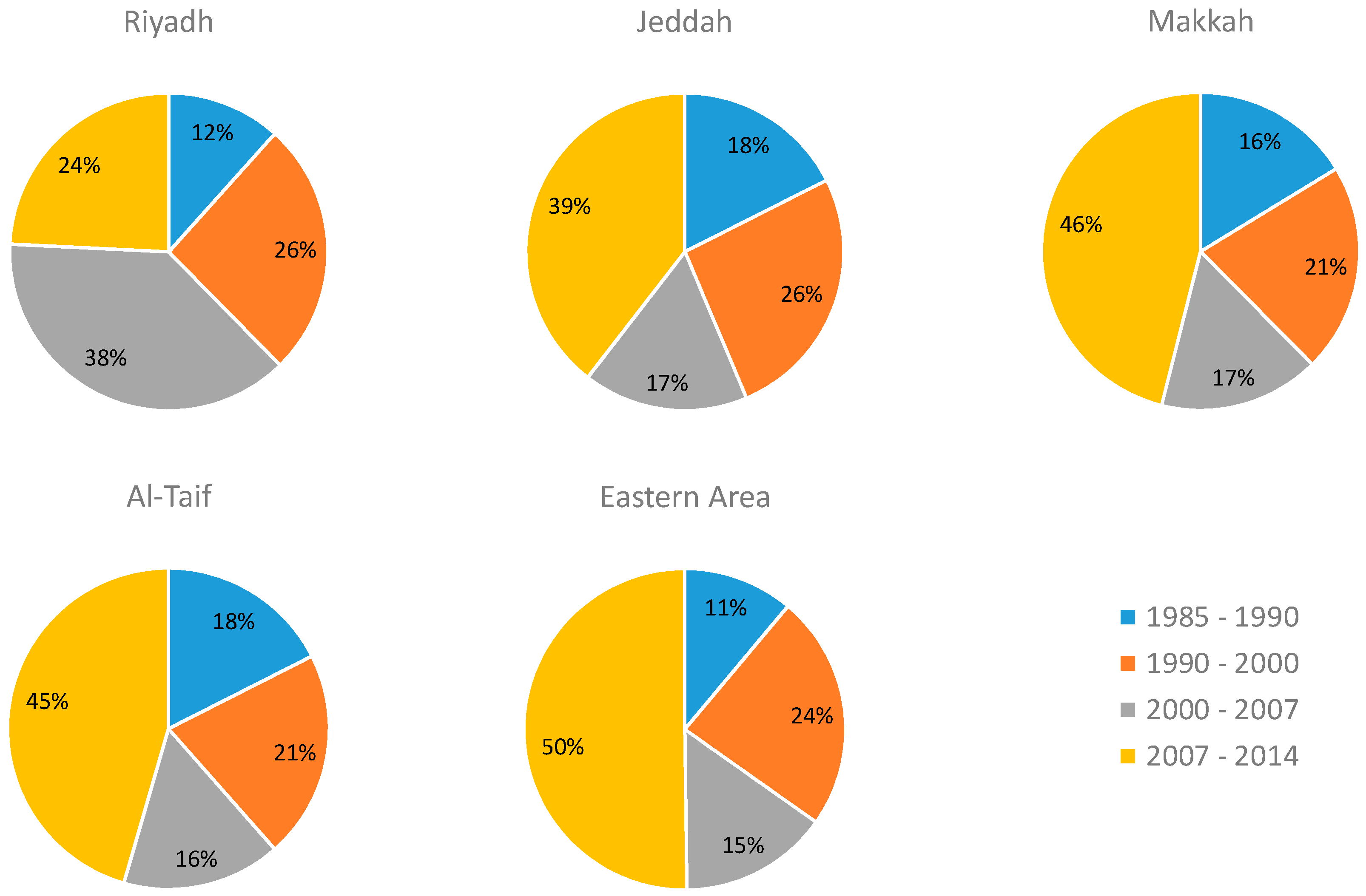
The analysis of urban growth showed variations from 1985 to 2014. For the capital city of Riyadh, high growth took place from 2000 to 2007, which then decreased from 2007 to 2014. In contrast, the growth in Jeddah was relatively similar for all change periods, while the highest increase was observed between 2007 and 2014. Makkah, Al-Taif and Eastern Area also showed massive growth between 2007 and 2014 periods (
Figure 8).
Figure 8 shows the size of urban growth in percentage for each period between 1985 and 2014. The massive urban growth, potentially in the later years, can be attributed to the increase in the oil price between 2005 and 2014 that allowed increases in the national budget of the country, which was then used for development across the country. The development during this period was directed more towards other cities than the developed cities such as Riyadh. As
Figure 8 indicates, 50% of the development of the Eastern Area from 1985 to 2014 was between 2007 and 2014. Just as urban planning has a significant role in past development, it will also contribute to future development. The government now intends to rely on the investment, tourism and industrial sectors by 2020 and into 2030, instead of on oil revenues [
72]. Such changes will expand the size of the cities and allow for more development in the near future. The predictions for 2024 and 2034 show an increase in urban growth in all five cities, when most of future development will tend to be close to existing urban areas due to economic benefits [
40,
73]. With such developments, the local authorities and related sectors will need to join together to provide sustainable development for future urban growth.
The classification of LULC maps was conducted using OBIA technique in this study. The overall accuracies ranged from 82% to 96% in all five cities, which indicates highly robust results to model LULC changes. However, previous studies in Saudi Arabia showed an improvement of the classification accuracy using pixel-based approaches. For example, Rahman [
15] used MLC and ISODATA methods to classify urban build-up changes in Al-Khobar, Saudi Arabia and concluded that ISODATA method provided overall accuracy greater than 85%. Similarly, Pellikka and Alshaikh [
16] detected LULC changes in Al-Baha, Saudi Arabia using MLC and achieved overall accuracies between 81% and 96%. Thus, compared to these results, both OBIA and traditional pixel-based approaches performed well. This may be due to the medium spatial resolution (e.g., Landsat), where both pixels and objects are nearly similar in scale, which provided approximately similar results.
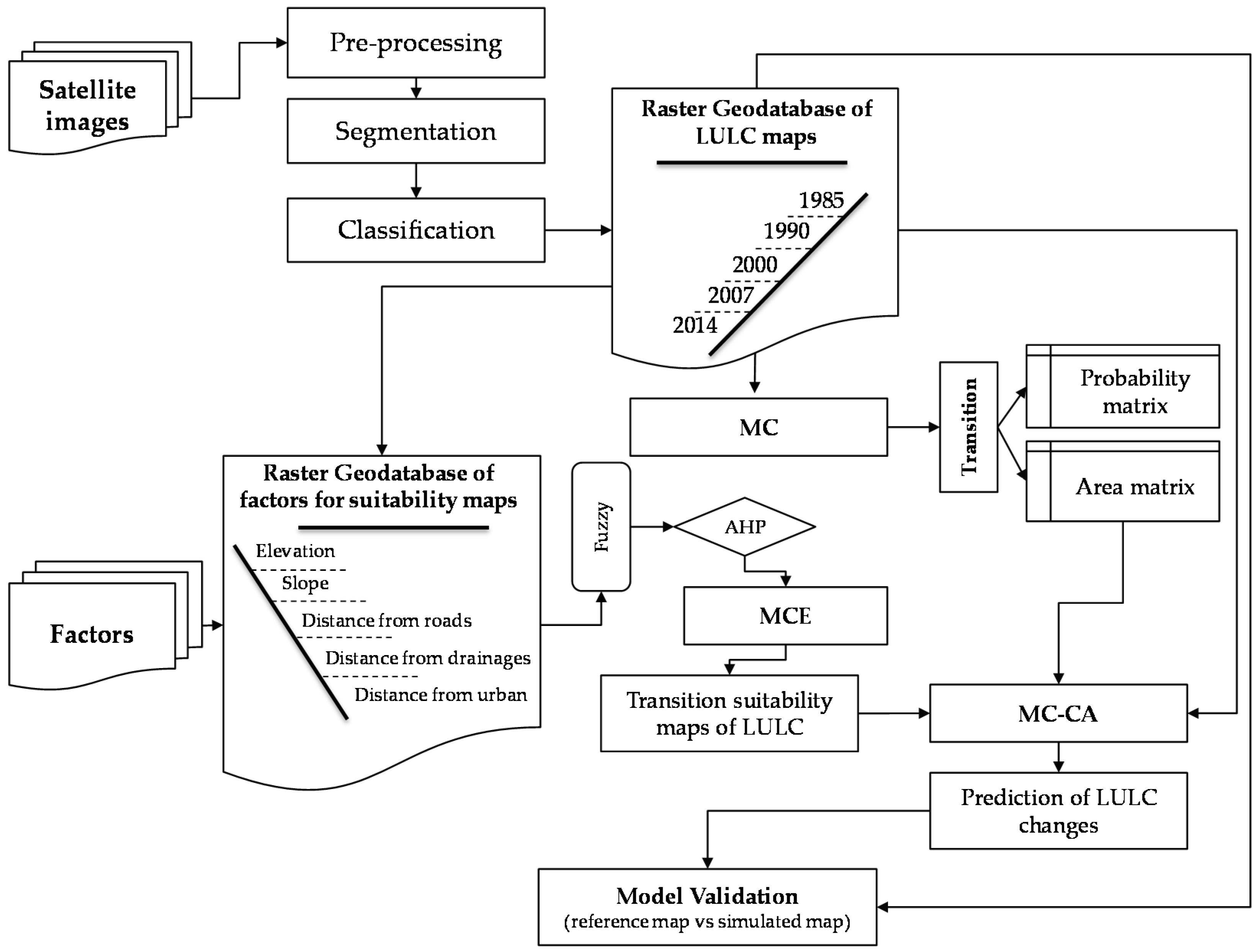
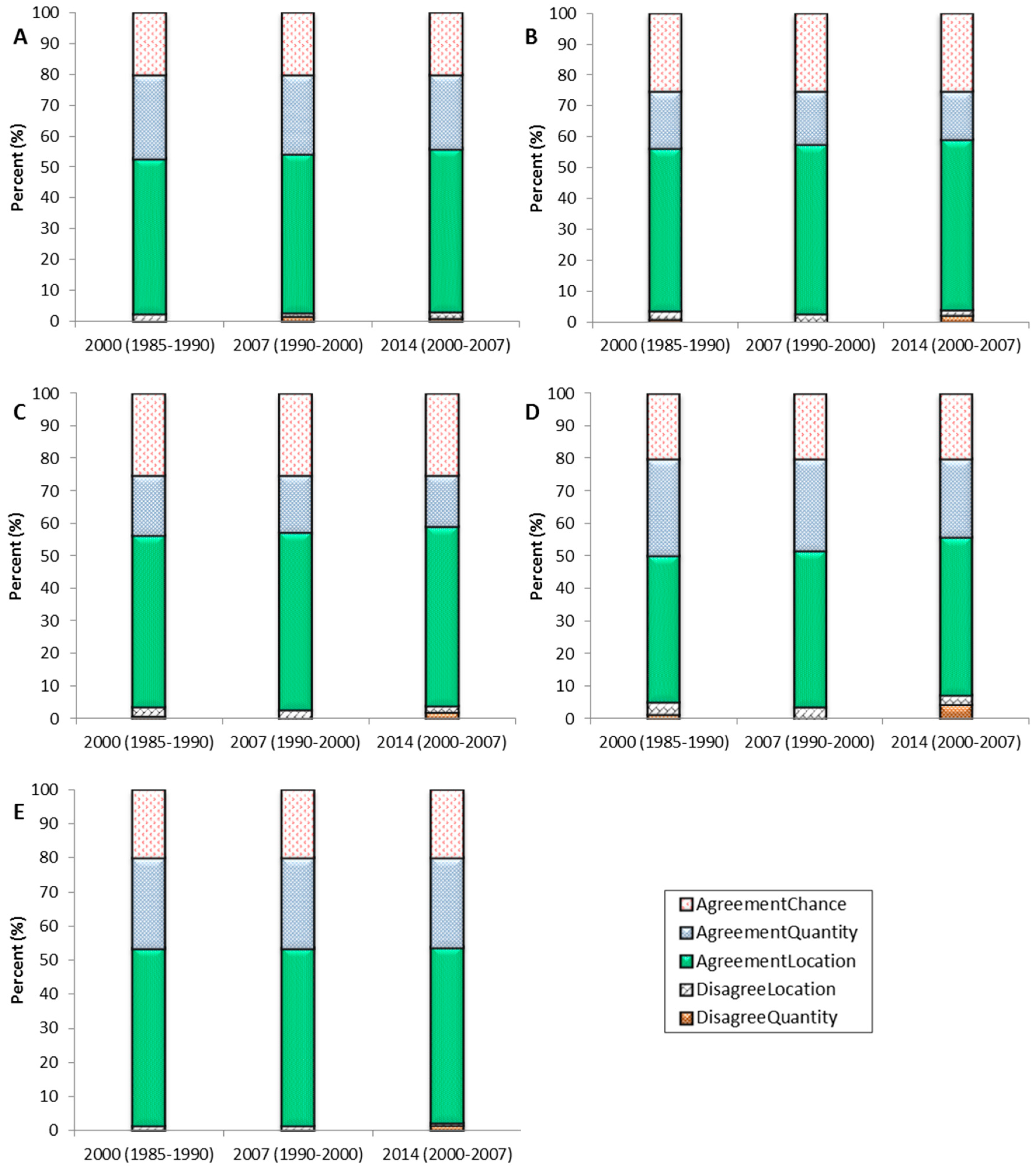
The methodology used in this research provided an opportunity to integrate time-series LULC classifications into MC–CA models. However, the assumptions of MC model that the amount of change observed during the calibration period will remain the same during the entire projection periods is not always true [
28] because there are other factors that influence the LULC changes and hence impact on the model outcomes. This difficulty is overcome to some extent through the use of CA model that allows us to incorporate other spatial variables to address the neighbourhood effect in the change process. The use of time-series classifications of different change periods has advantage in step-wise model prediction accuracy assessment in terms of urban expansion in the five cities. The MC model used the time-series data to quantify the transition amount and patterns of urban growth, which allowed us to predict urban expansion for the next change period. For example, the 1985 and 1990 LULC classifications were used to predict urban expansion for the year 2000. The simulated change for the year 2000 (predicted) was then compared with the year 2000 classification (reference) to assess the modelling accuracy. The processes were repeated for all the change years. These step-wise evaluations and validation of model outputs in a time series manner allowed achieving higher accuracy in prediction modelling and provided confidence in obtaining nearly accurate future simulations for the years 2024 and 2034. However, there is further scope to improve the model outputs through the inclusion of more variables such as socio-economic and environmental factors as they also contribute significantly towards changes. A subsequent study is planned to include these variables for more accurate predictions.
6. Conclusions
Saudi Arabian cities have faced massive urban growth during the last four decades. Government planning has contributed directly to this expansion and it will continue to support future development. Urban growth is recognized as a key factor that is altering the natural ecosystem and modifying the landscape of the Earth’s surface. Measuring past and present urban growth and modelling future urban growth is essential for understanding its patterns and enabling sustainable development. This study firstly used Landsat TM, ETM+ and OLI satellite images to analyse urban expansion between 1985 and 2014 in five Saudi Arabian cities: Riyadh, Jeddah, Makkah, Al-Taif and the Eastern Area. It then predicted the potential growth in the selected cities for 2024 and 2034 using the MC–CA integrated model based on past land cover classifications. The simulation results showed that urban growth is likely to increase in all five cities during the next 20 years in a similar manner to past growth. The cities are likely to expand near the current growth areas, which may result in complex structures and patterns of urban growth in these cities. Most of the other land cover classes have been converted in the past to urban land use and are likely to convert in a similar way in the future. However, bare soil is the most likely land cover class for conversion into urban areas.
While Remote Sensing data can be effectively used to model dynamic land-cover changes and provide the required information to sufficiently predict future changes, accurate classification of time-series satellite imagery is essential for modelling LULC changes. The simulation of future scenarios is highly dependent on accurate information of historical LULC changes. The error in the LULC classification that is used as a modelling input is a major source for uncertainty in the model’s projections [
43,
74,
75]. In this study, the overall accuracies of LULC change maps were sufficiently high to provide precise simulations for future changes. OBIA and the updating classification approach helped in providing accurate information and reduce the amount of classification time for past land cover changes, especially for large study areas. The future predictions assessed by comparing the simulated and reference maps provided confidence in the model results.
The use of spatial factors such as elevation, slope, distance from drainage, distance from roads and distance from urban determined the neighbourhood suitability for urban growth, which further strengthened the model prediction. However, incorporation of other variables, such as socio-economic and environmental factors, can improve the model predictions for a more detailed interpretation of the future patterns of urban LULC changes. Nevertheless, the prediction results for the future changes produced in this research provide essential information to support the decision-making processes for the planners and local authorities to ensure environmental sustainability and protection of the natural resources of the five cities.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}