
Adjusted Spectral Matched Filter for Target Detection in Hyperspectral Imagery



Abstract
:
1. Introduction
2. CEM and RX Algorithms
2.1. CEM Algorithm
2.2. RX Algorithm
3. Adjusted Spectral Matched Filter
3.1. The Relationship between CEM and RX

3.2. Adjusted Spectral Matched Filter



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | CEM | RX Using Covariance Matrix | RX Using Correlation Matrix | ASMF n = 1 | AMSF n = 2 |
|---|---|---|---|---|---|
| Computing time | 3.90 s | 4.06 s | 3.80 s | 6.75 s | 6.86 s |
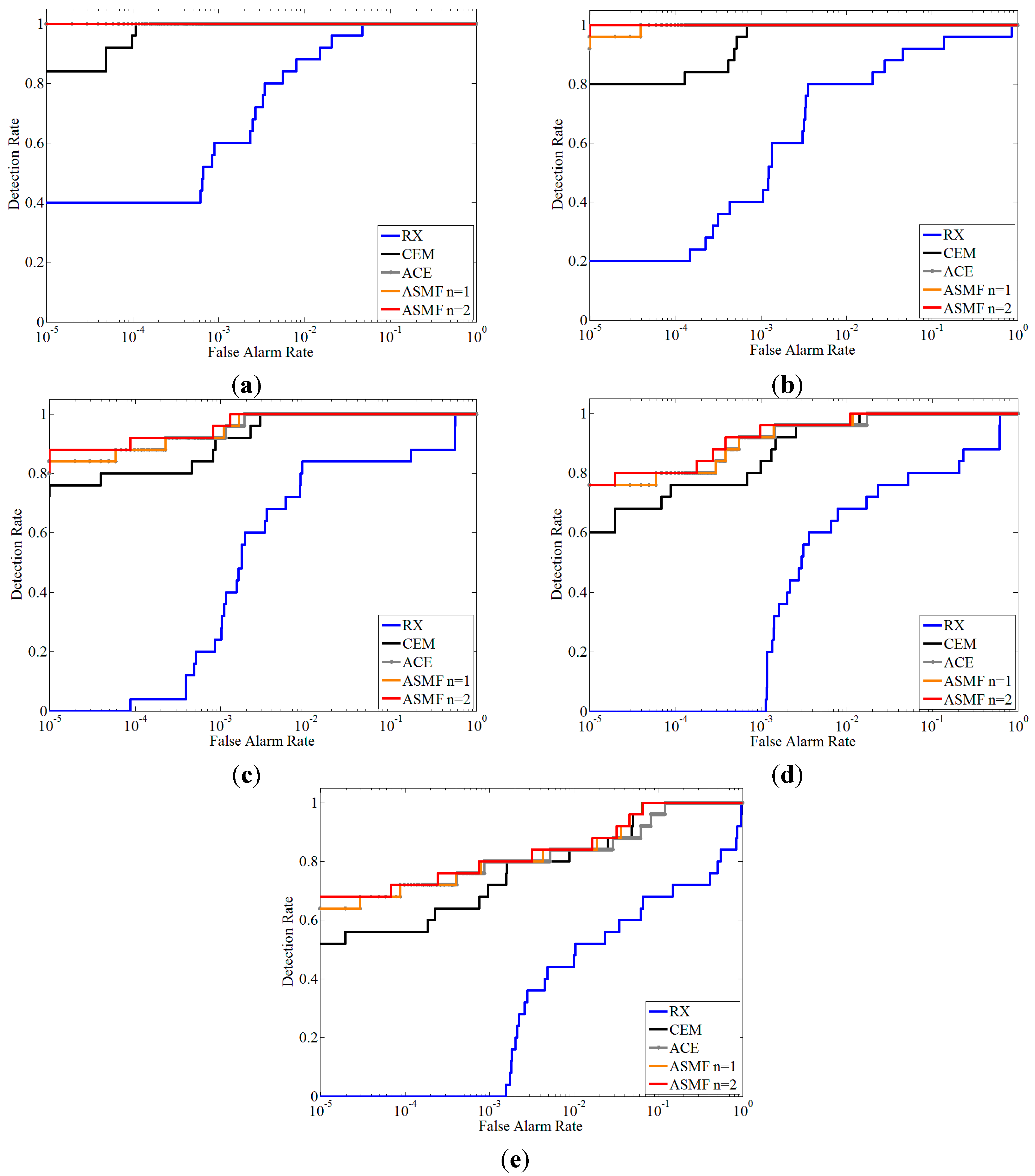
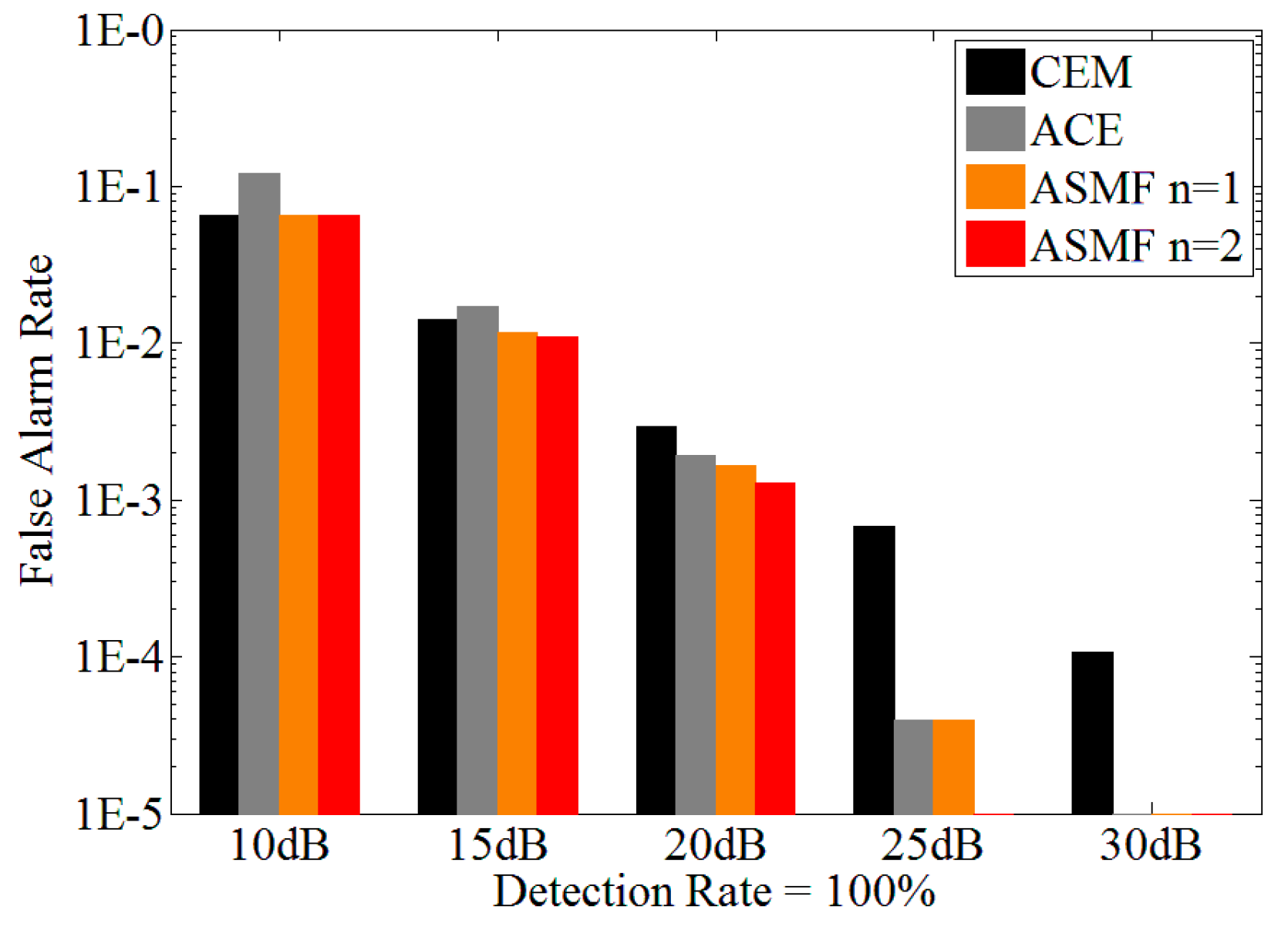
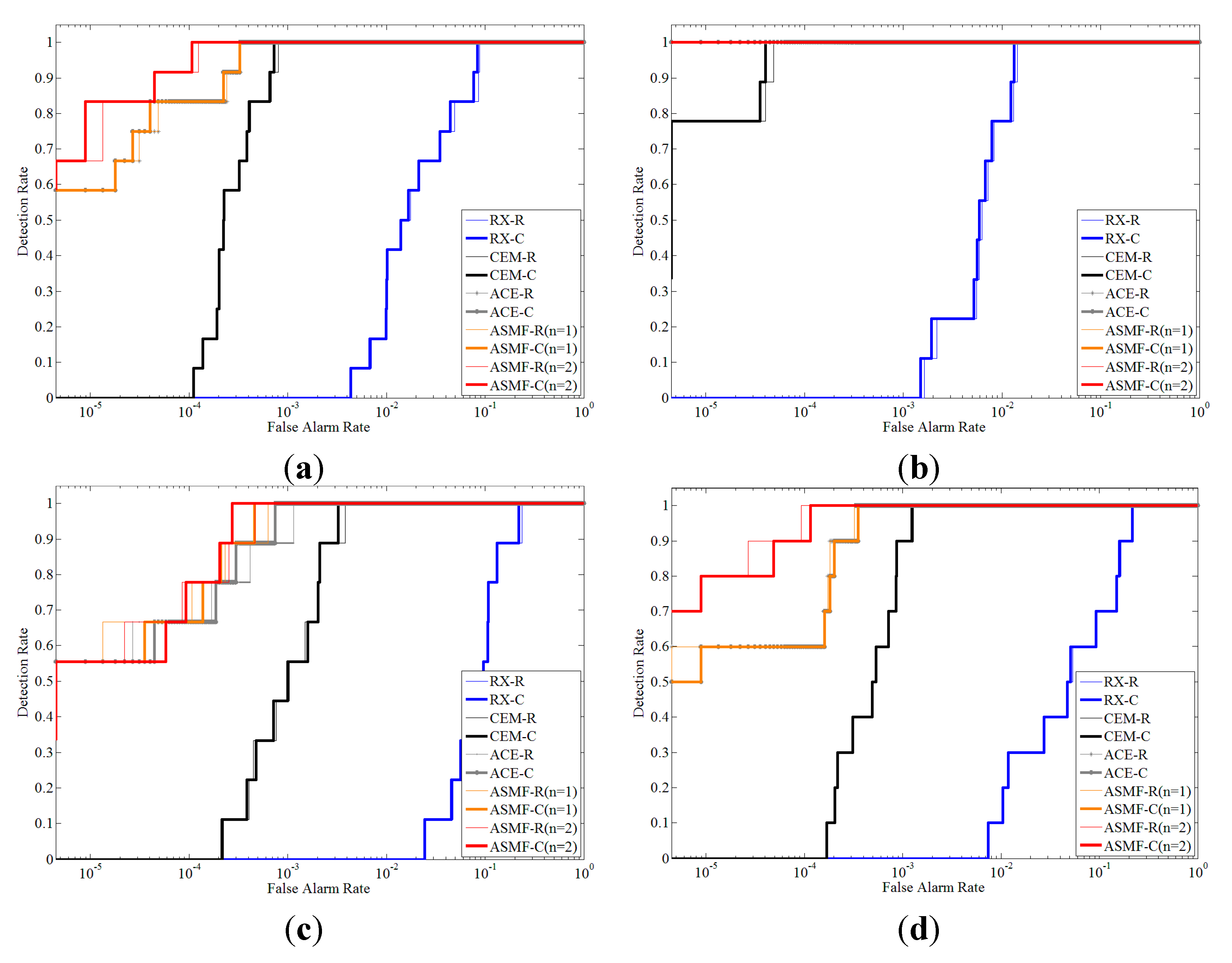
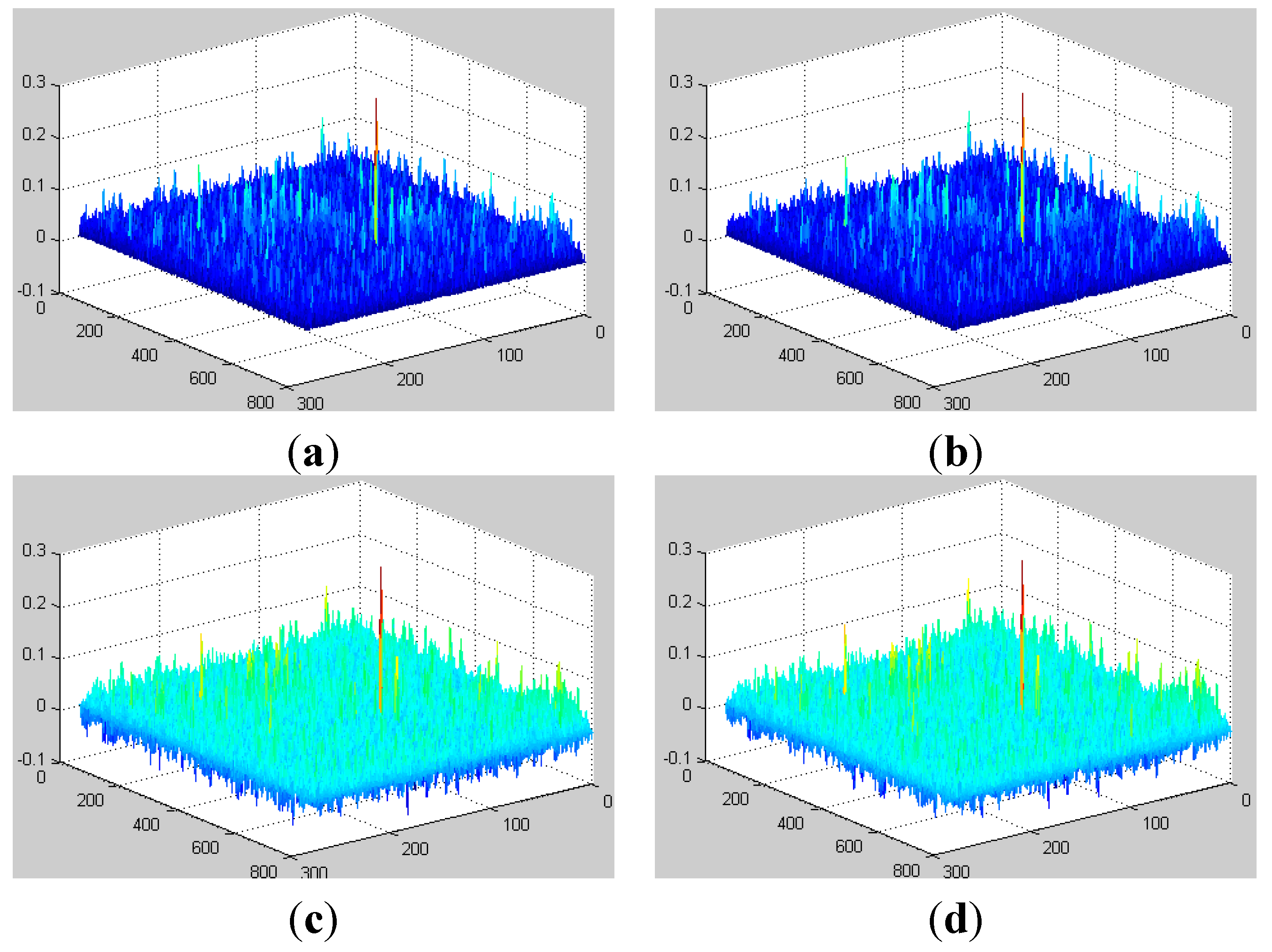
4. Experiments with Synthetic Data
4.1. Experiment Using Data without Strong Non-Target Anomalies
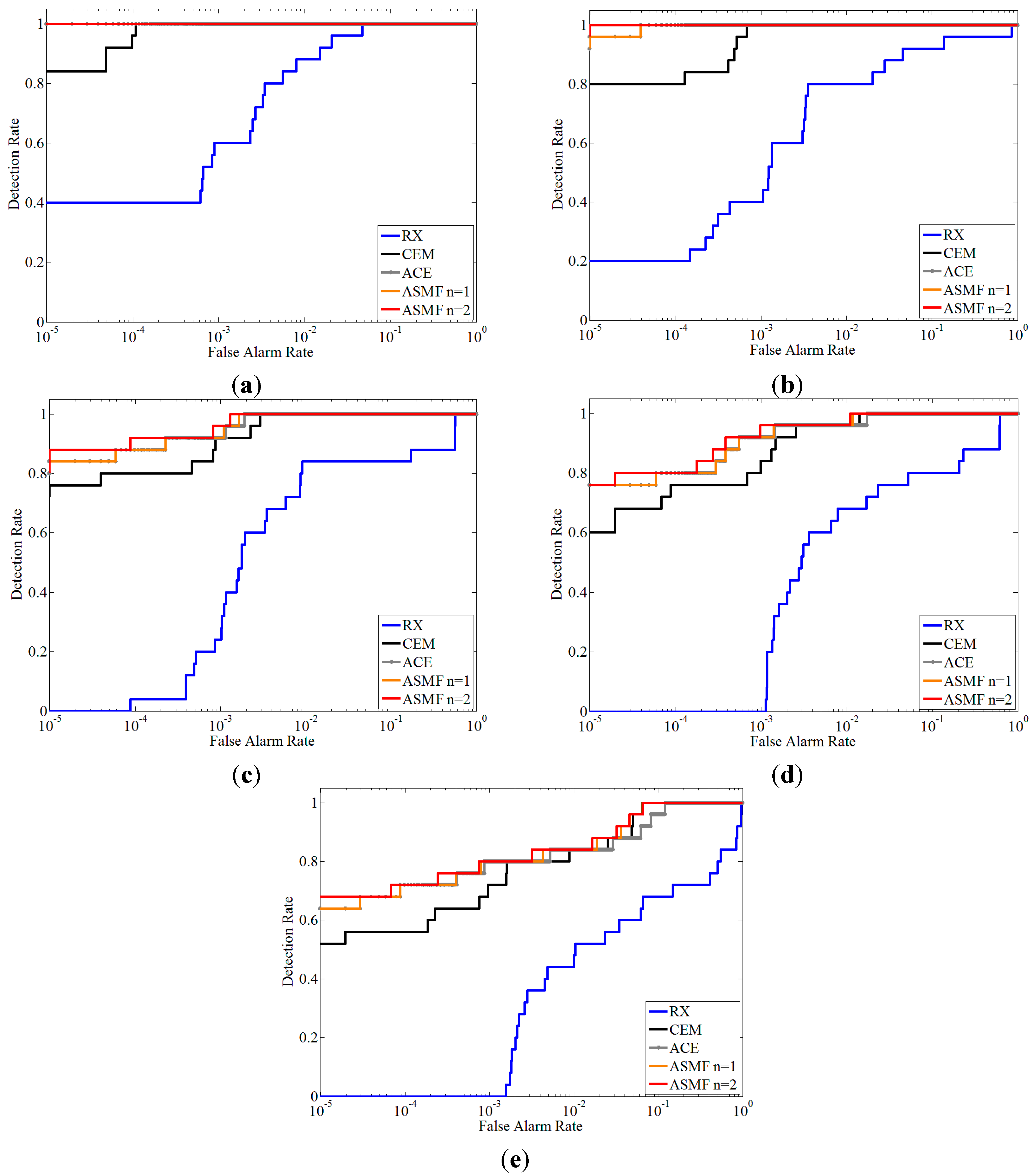


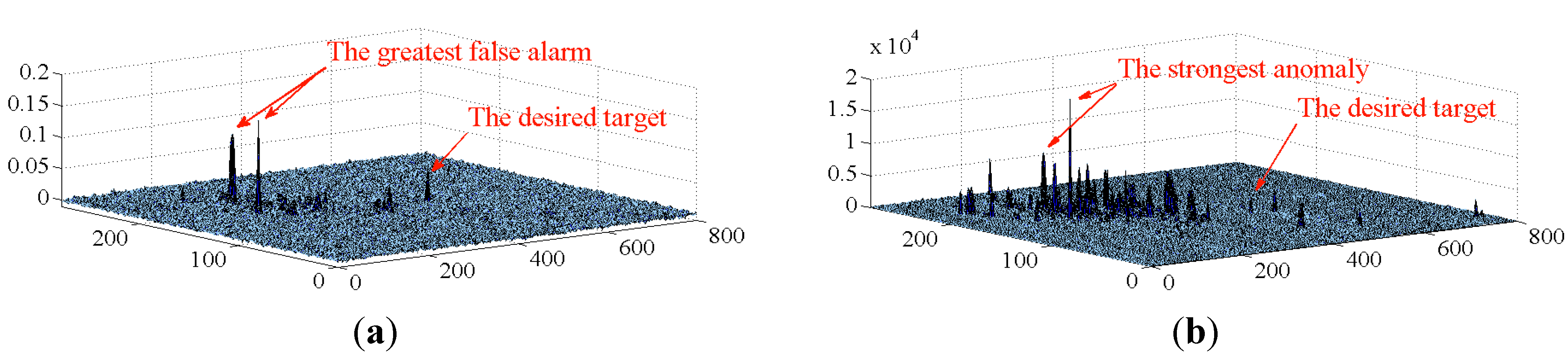
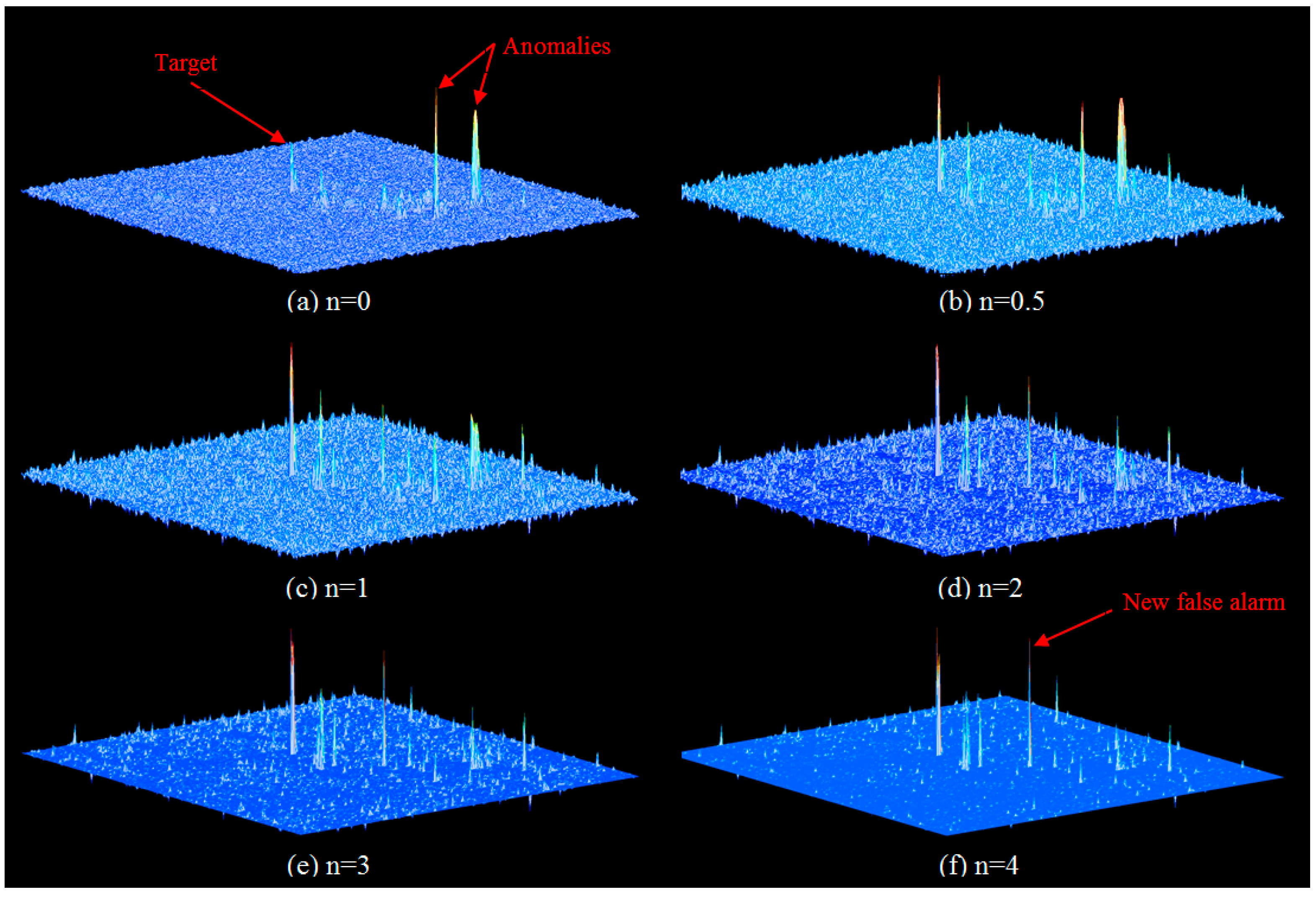
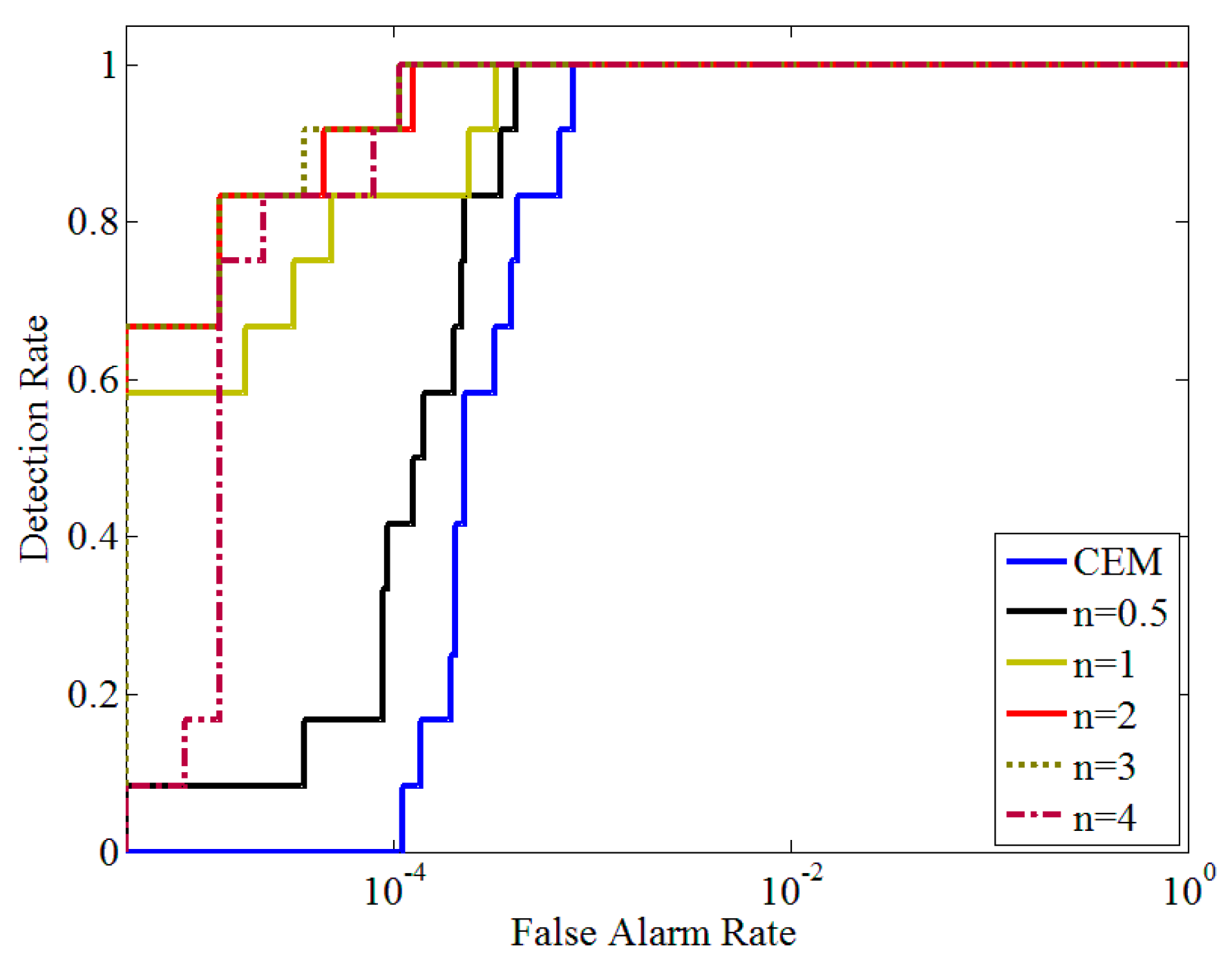
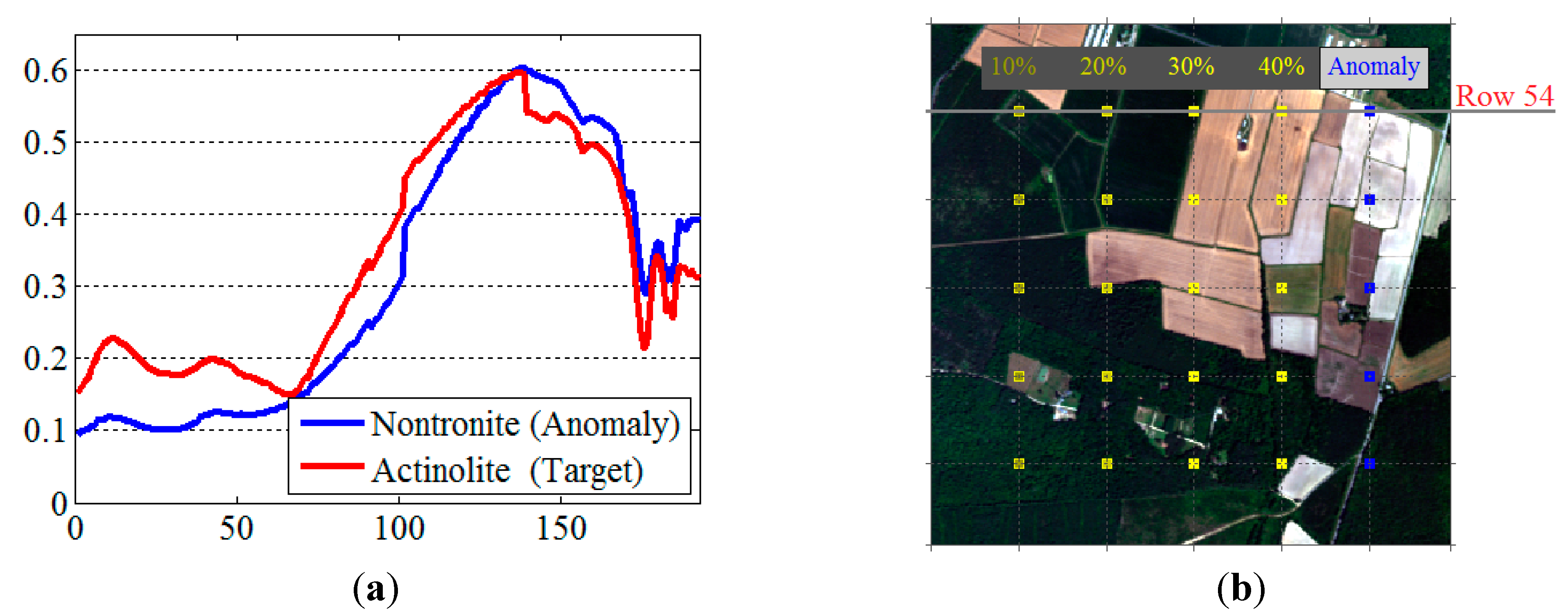
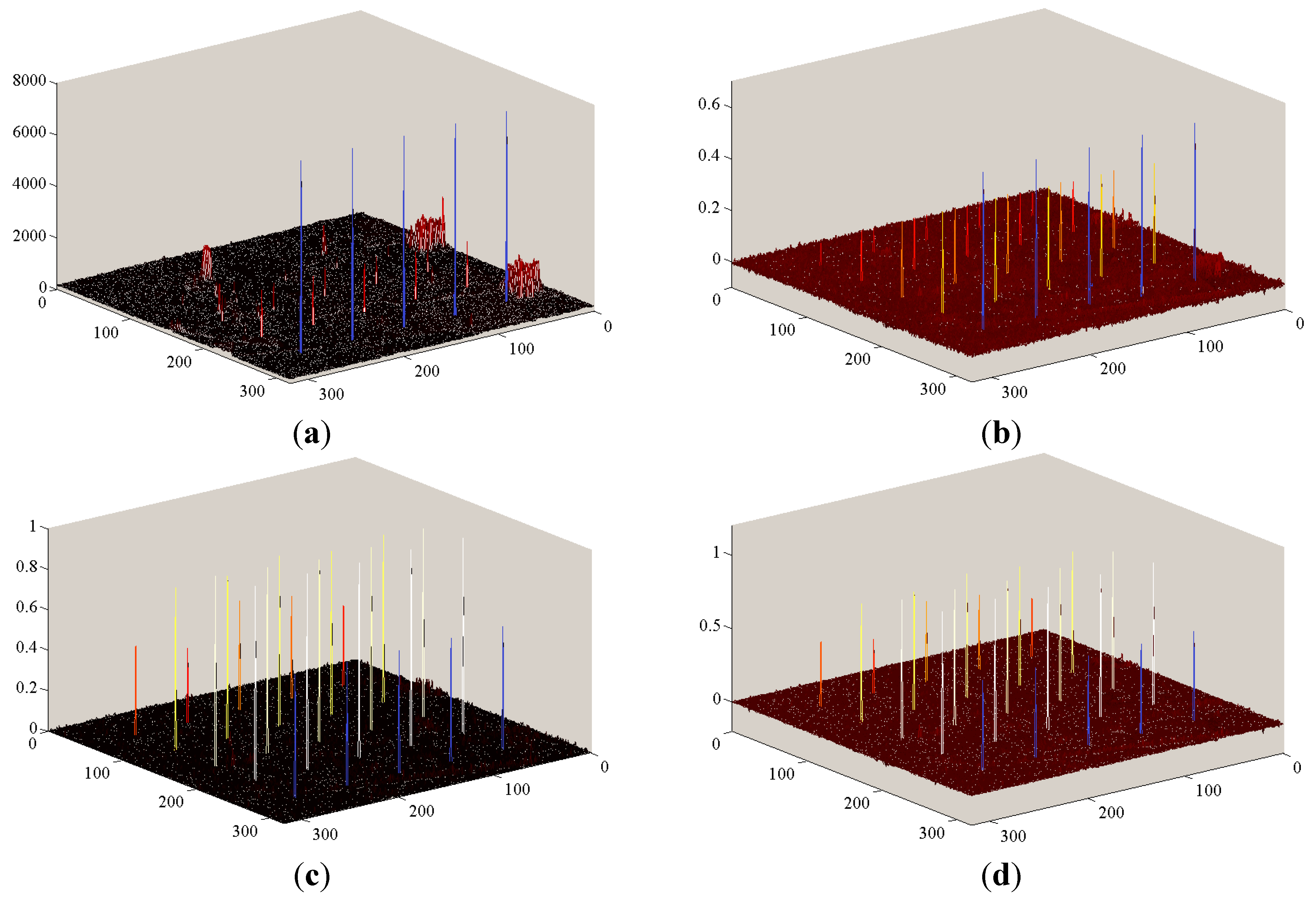
4.2. Experiment Using Data with Strong Non-Target Anomalies

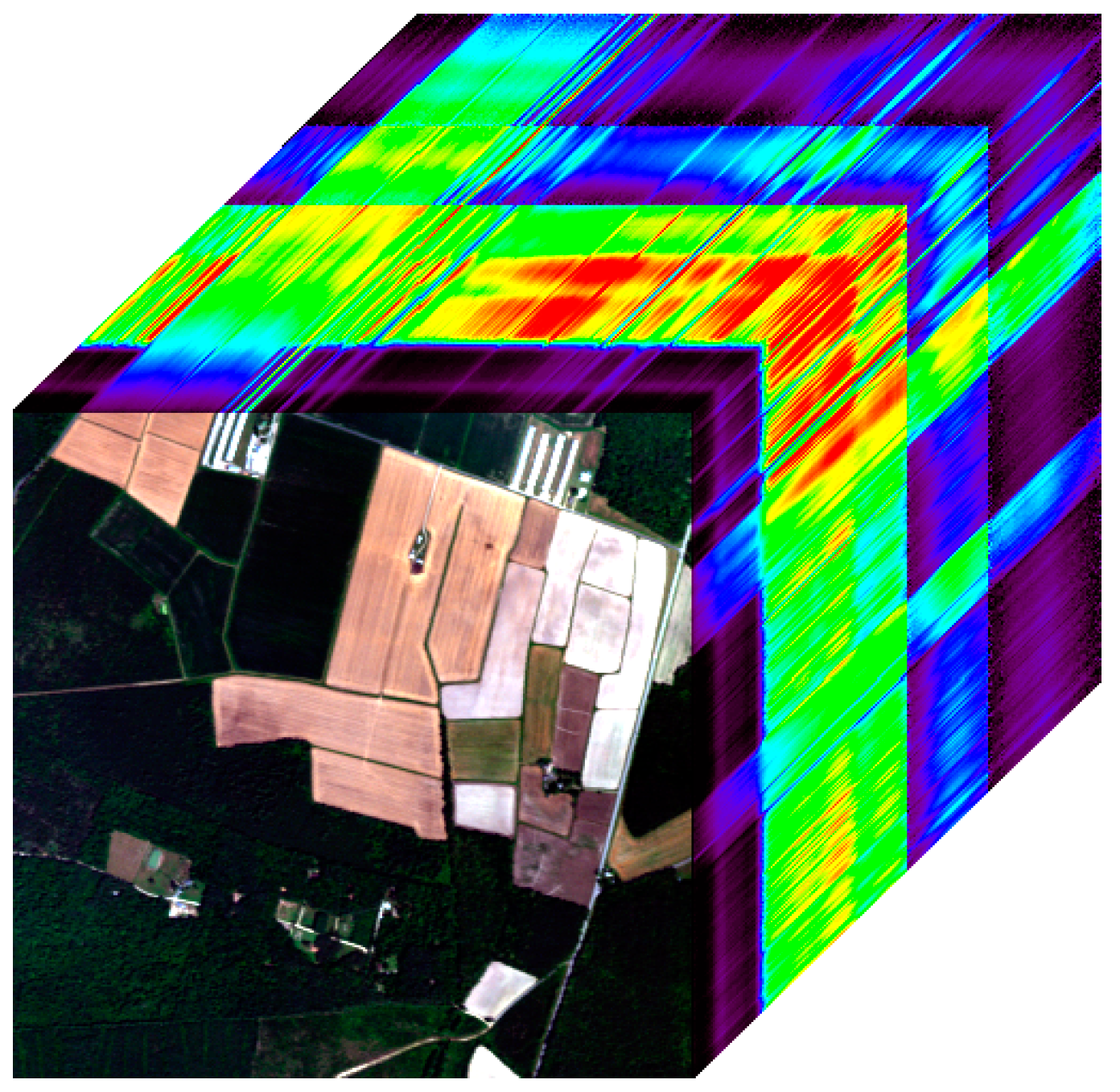
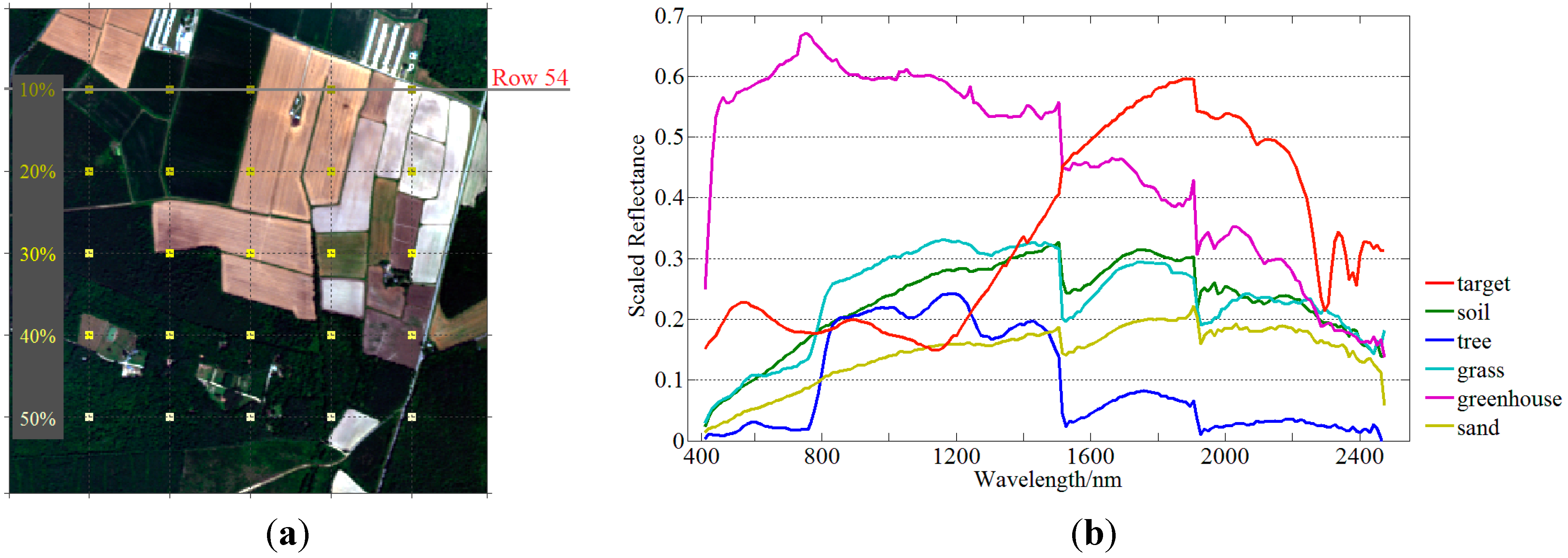
5. Experiments with Real Data
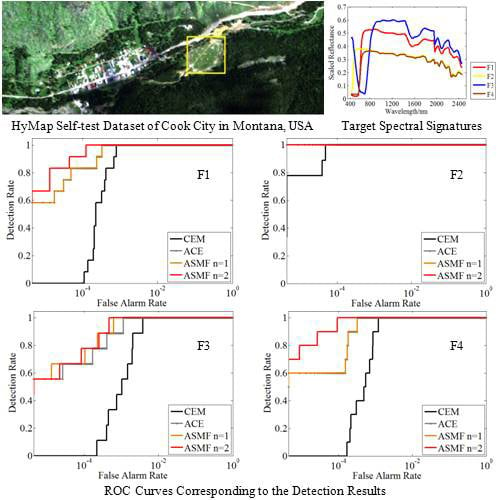
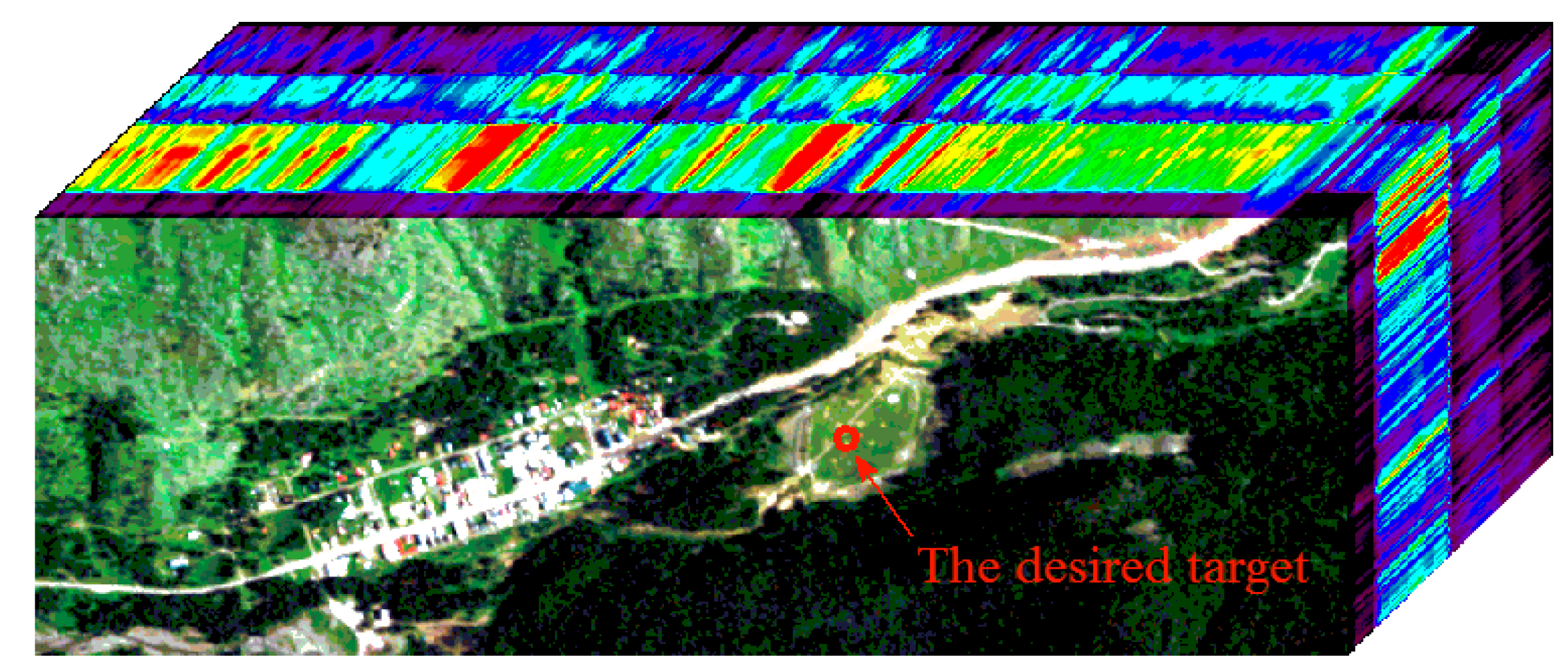
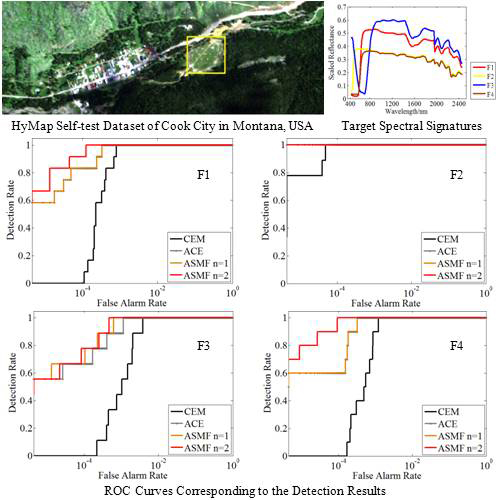
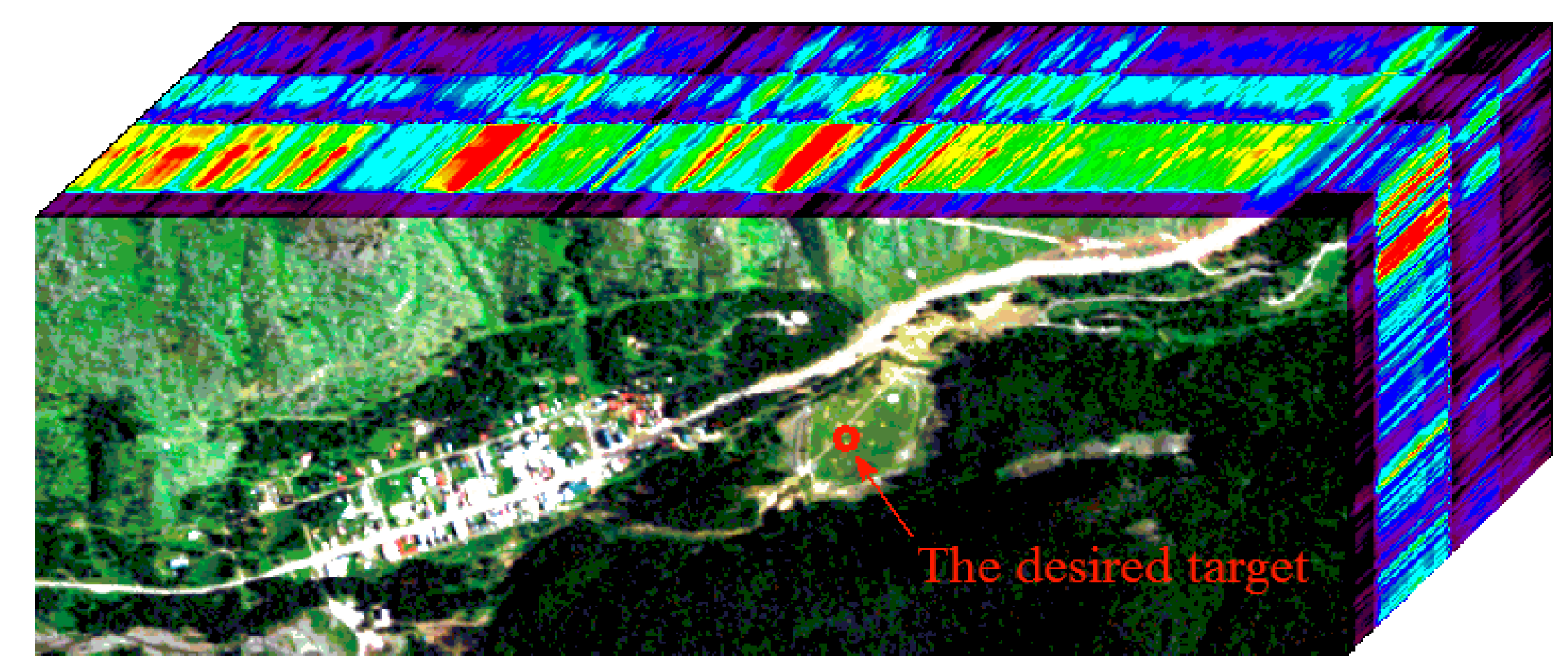
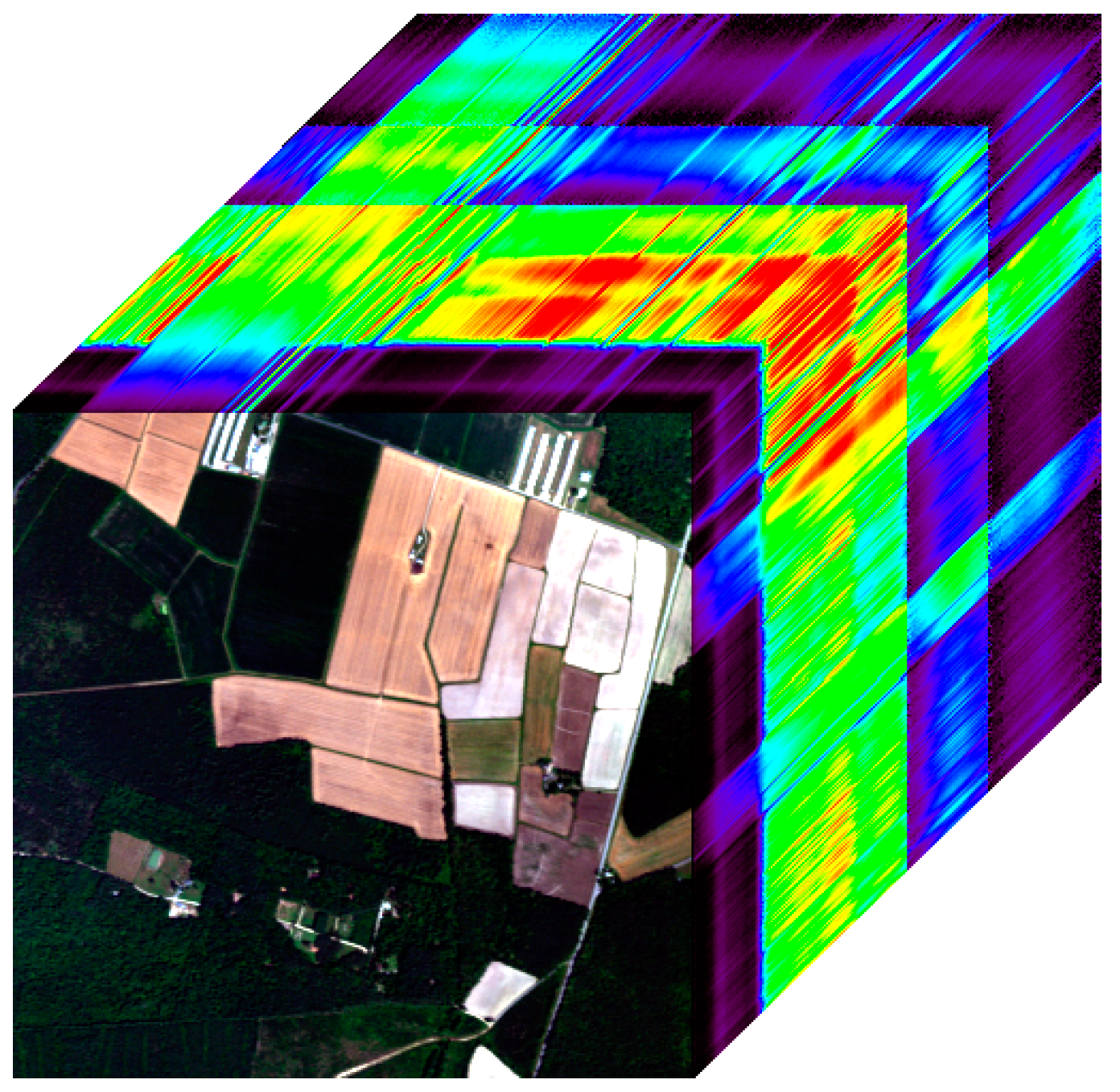
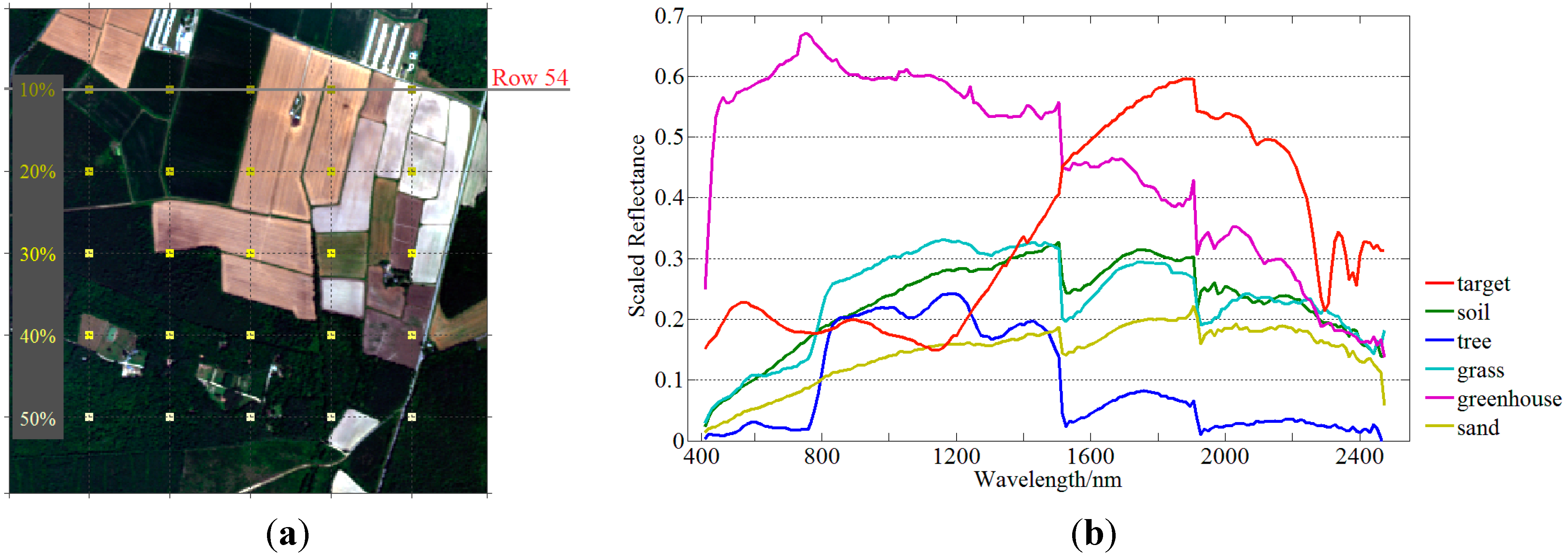
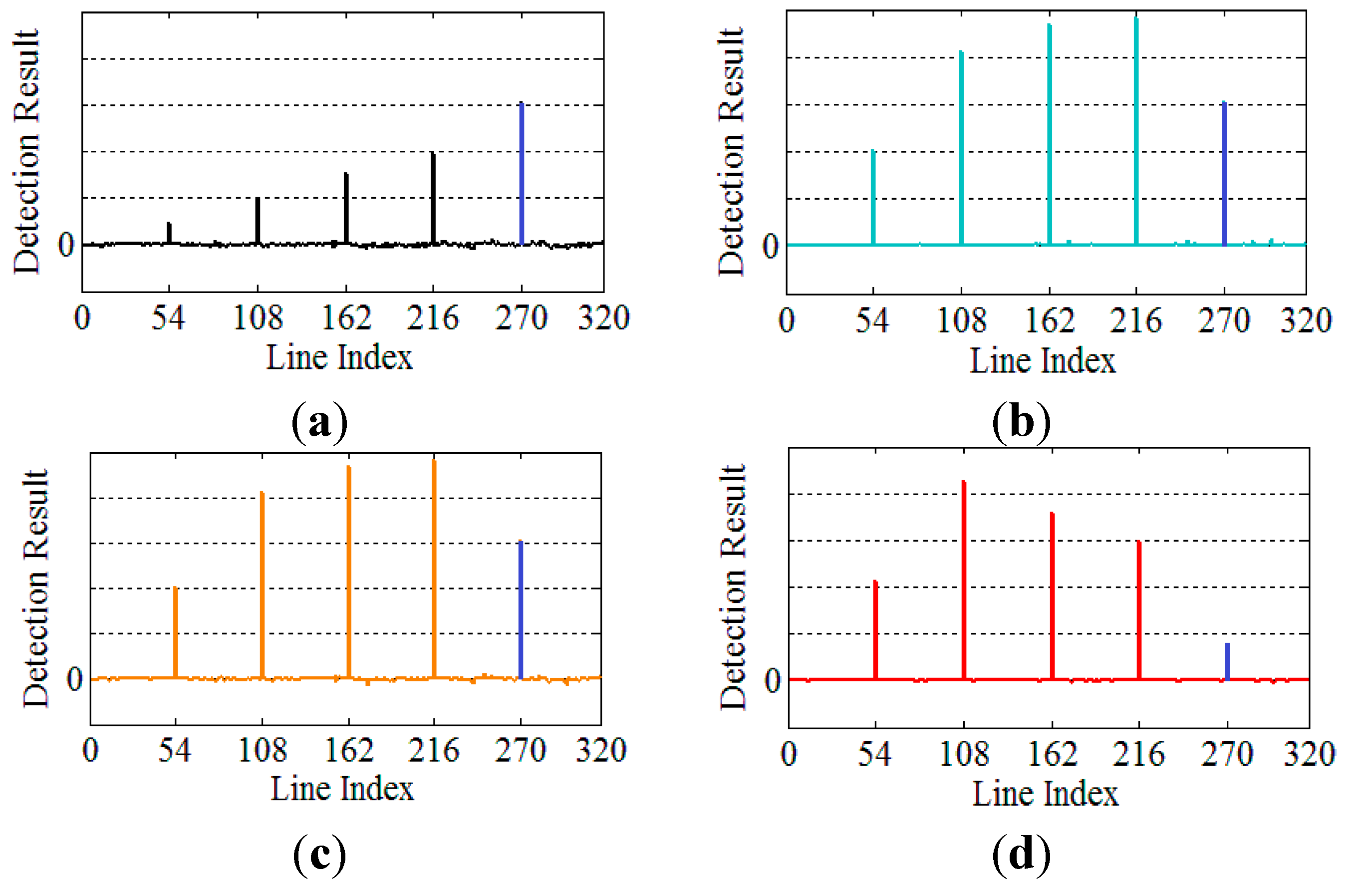
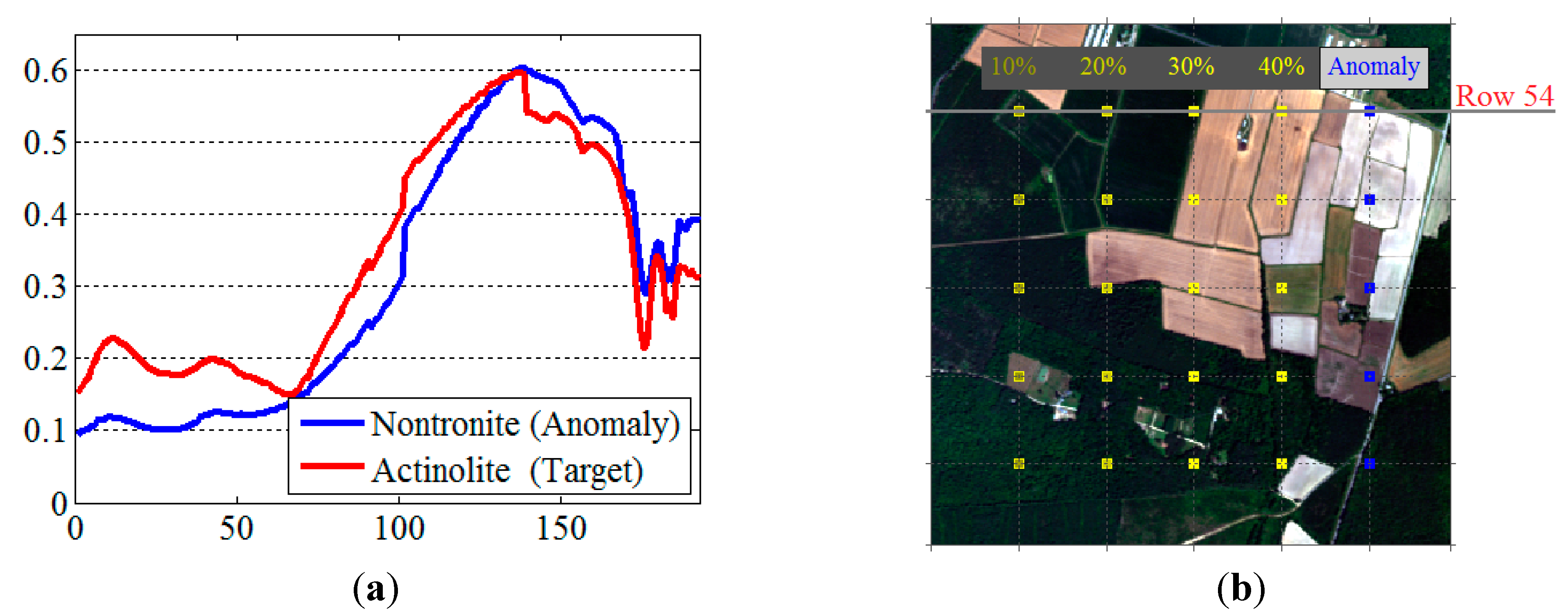
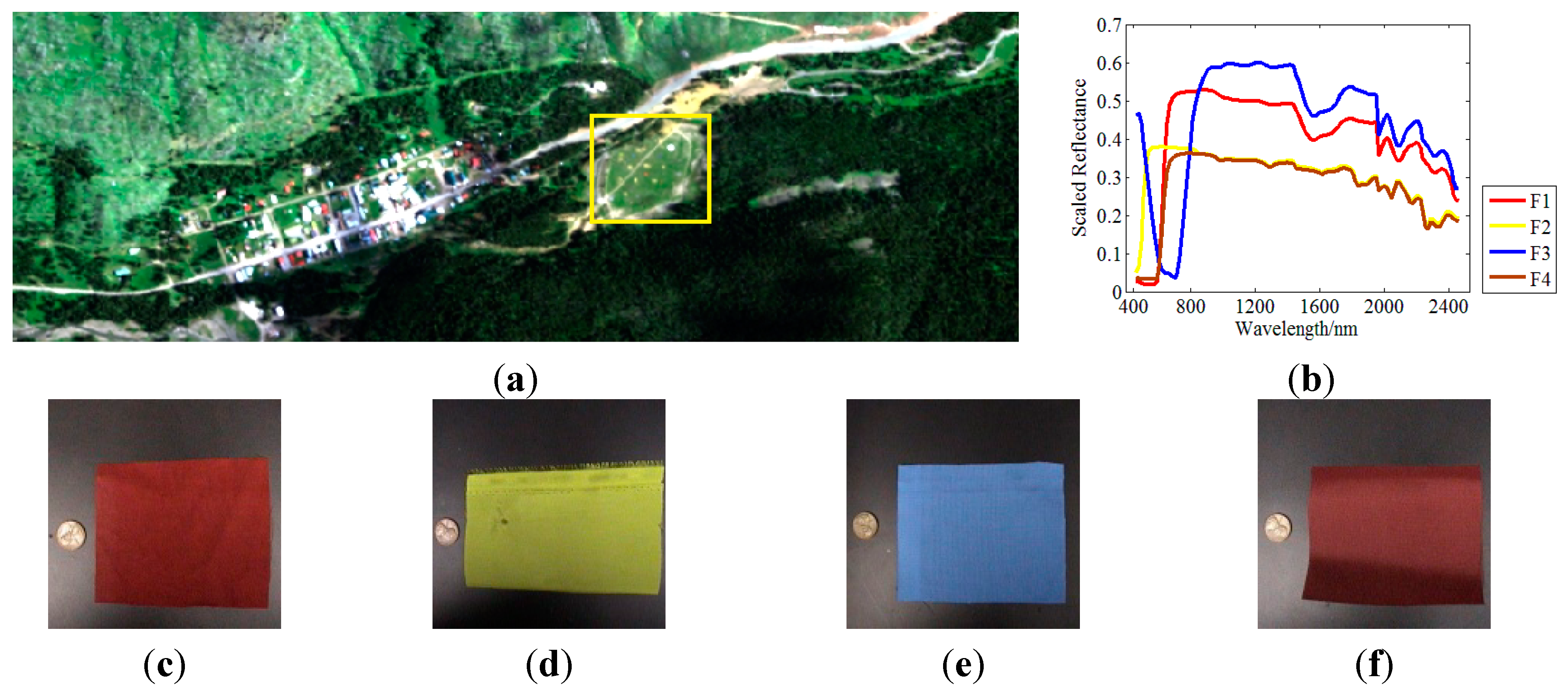
5.1. Experimental Design and Dataset
| Name | Size | Type |
|---|---|---|
| F1 | 3 × 3 m | Red Cotton |
| F2 | 3 × 3 m | Yellow Nylon |
| F3a | 2 × 2 m | Blue Cotton |
| F3b | 1 × 1 m | Blue Cotton |
| F4a | 2 × 2 m | Red Nylon |
| F4b | 1 × 1 m | Red Nylon |
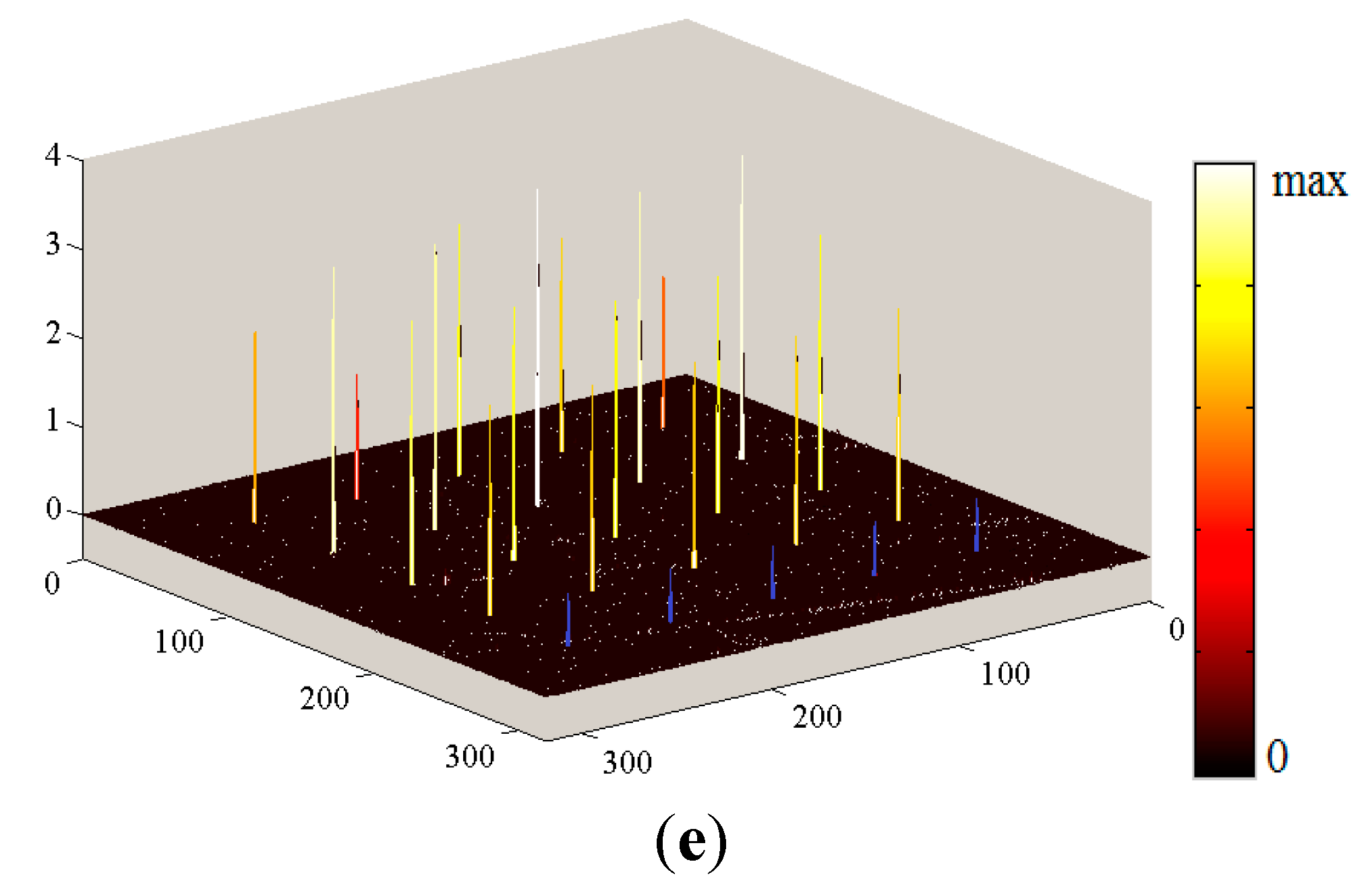
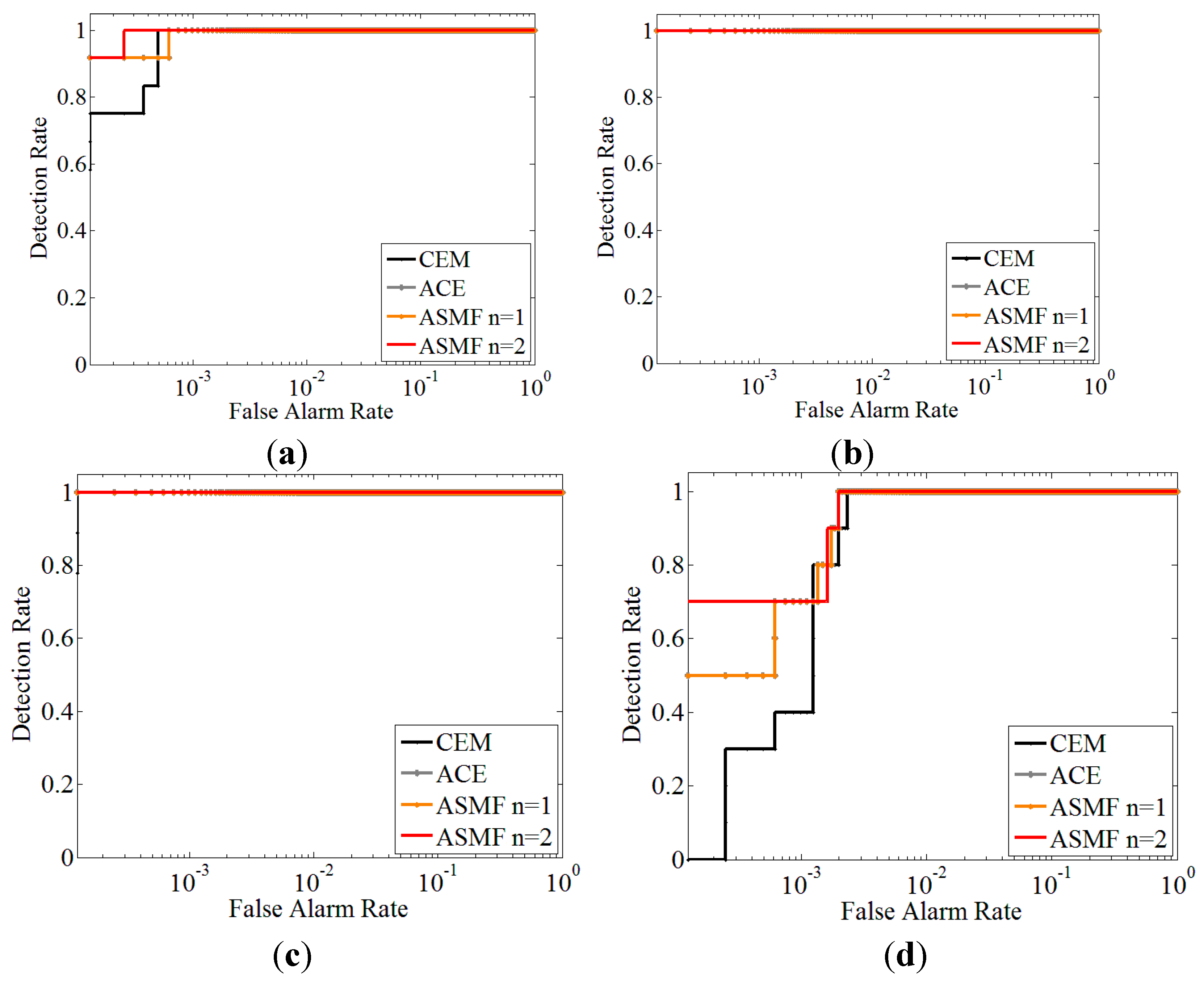
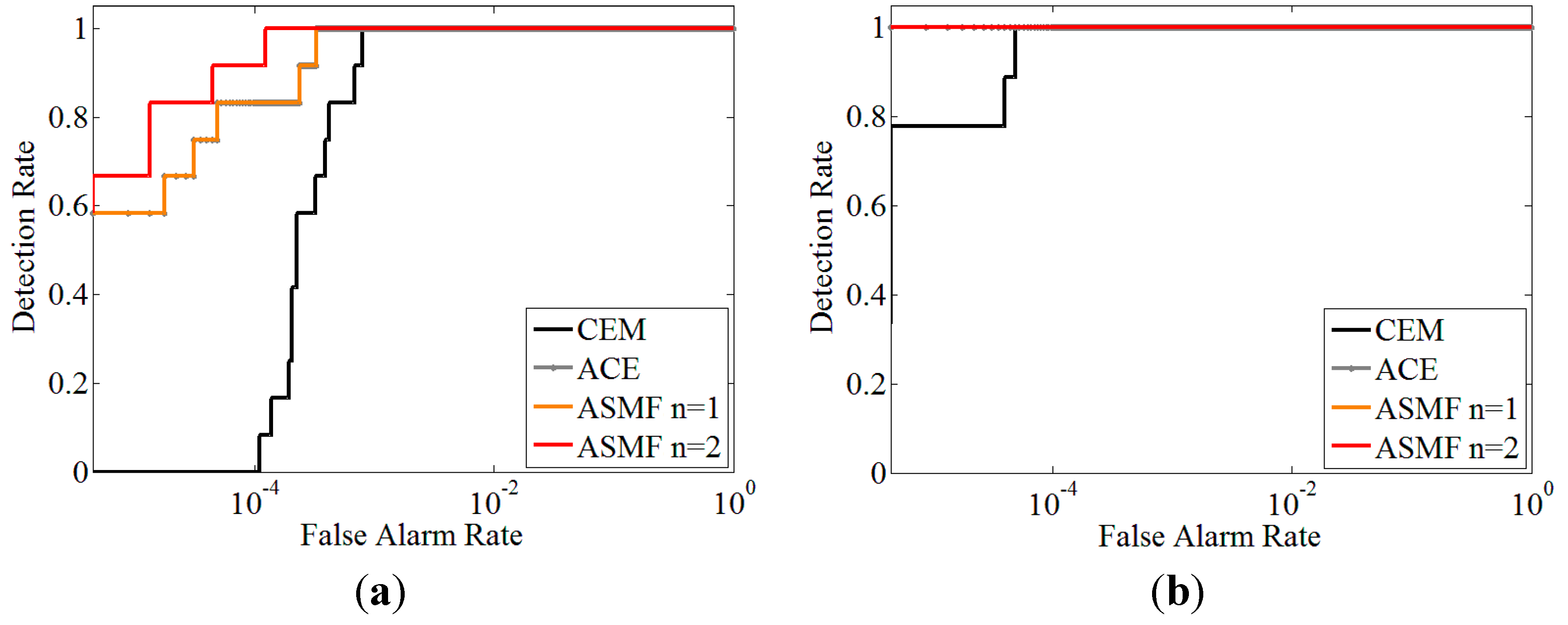
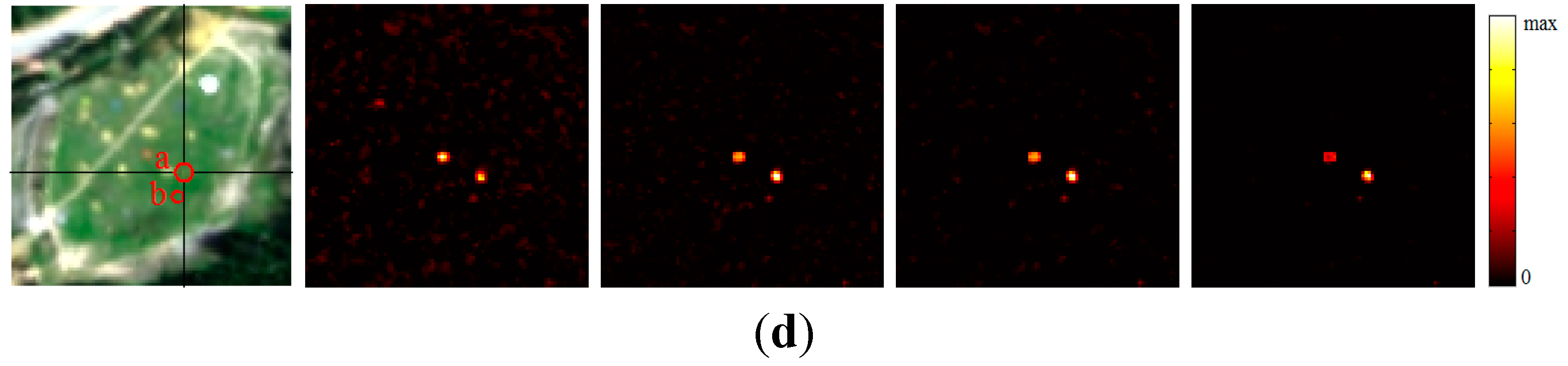
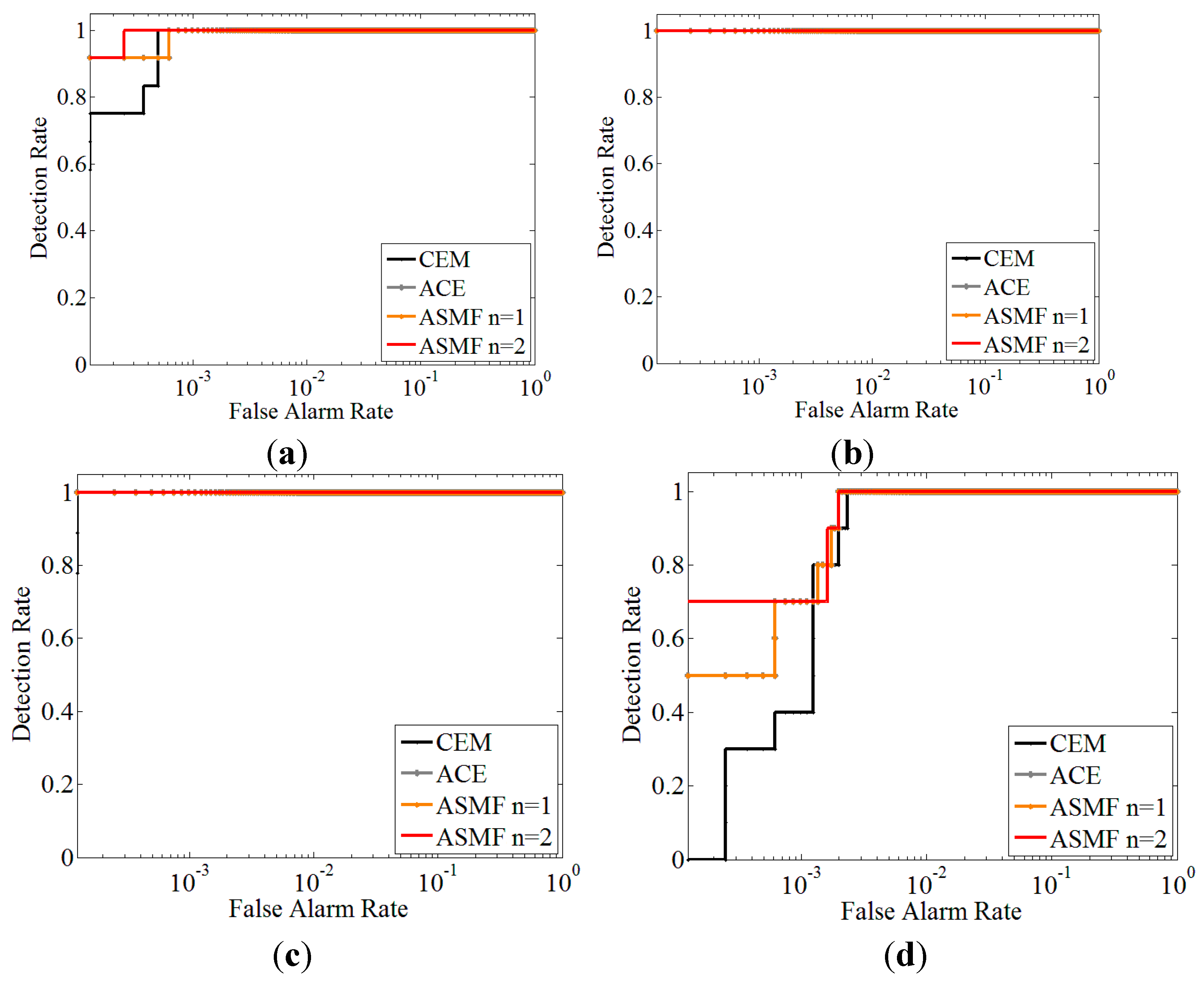
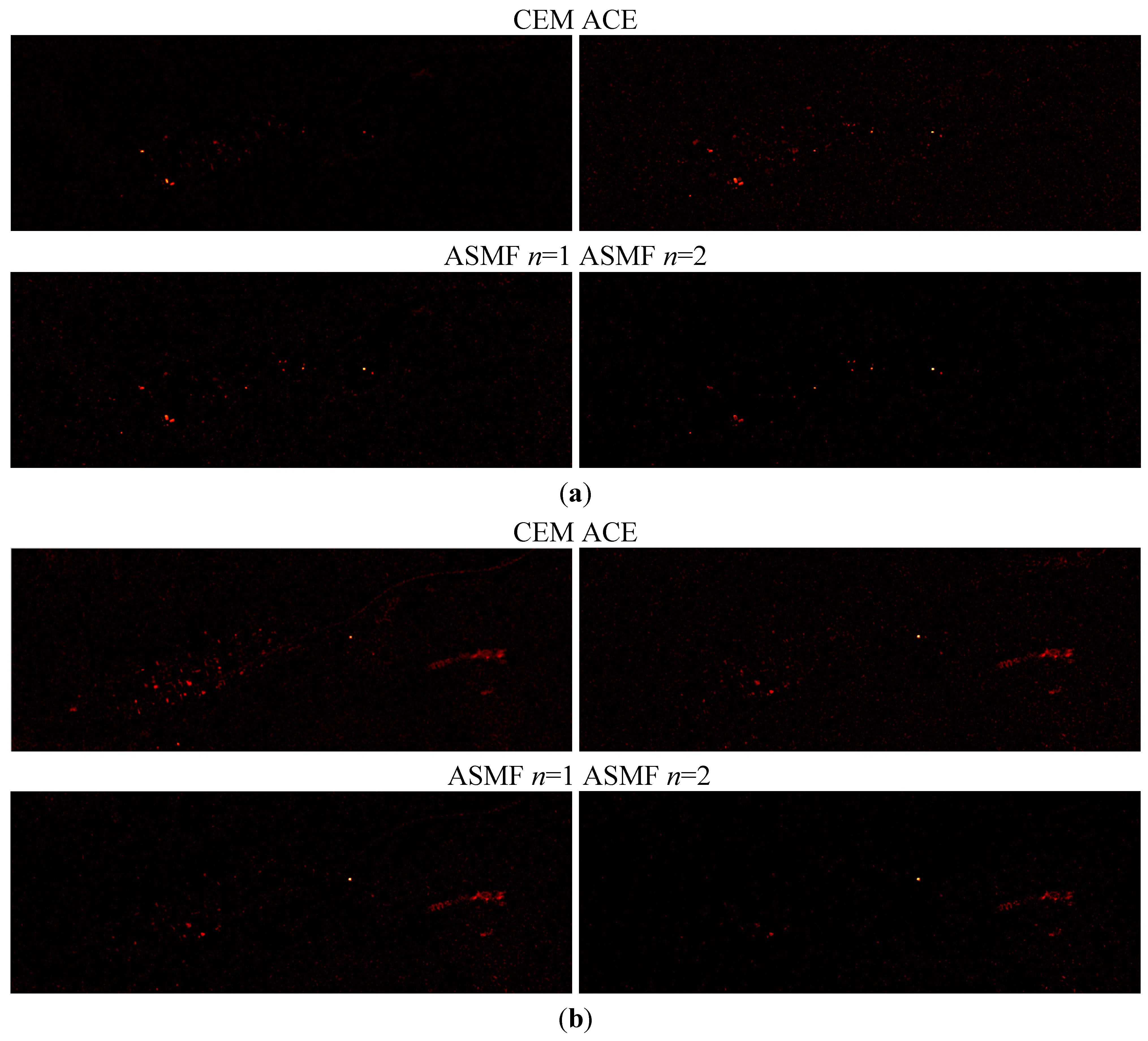
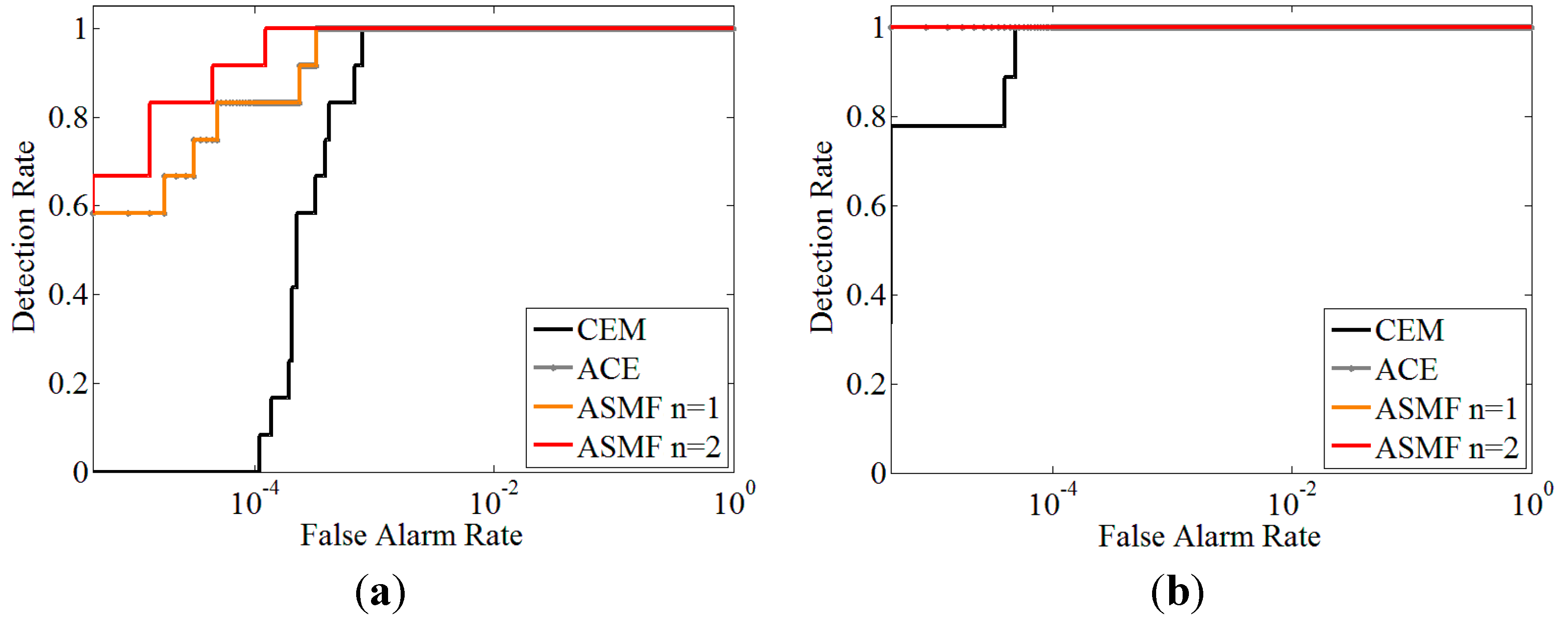
5.2. Experiment Using a Local Image with Homogeneous Background

| Algorithms | CEM | ACE | ASMF n = 1 | ASMF n = 2 |
|---|---|---|---|---|
| F1 | 4.95 × 10−4 | 6.18 × 10−4 | 6.18 × 10−4 | 2.47 × 10−4 |
| F2 | 0 | 0 | 0 | 0 |
| F3 | 1.24 × 10−4 | 0 | 0 | 0 |
| F4 | 2.30 × 10−3 | 2.00 × 10−3 | 2.00 × 10−3 | 2.00 × 10−3 |
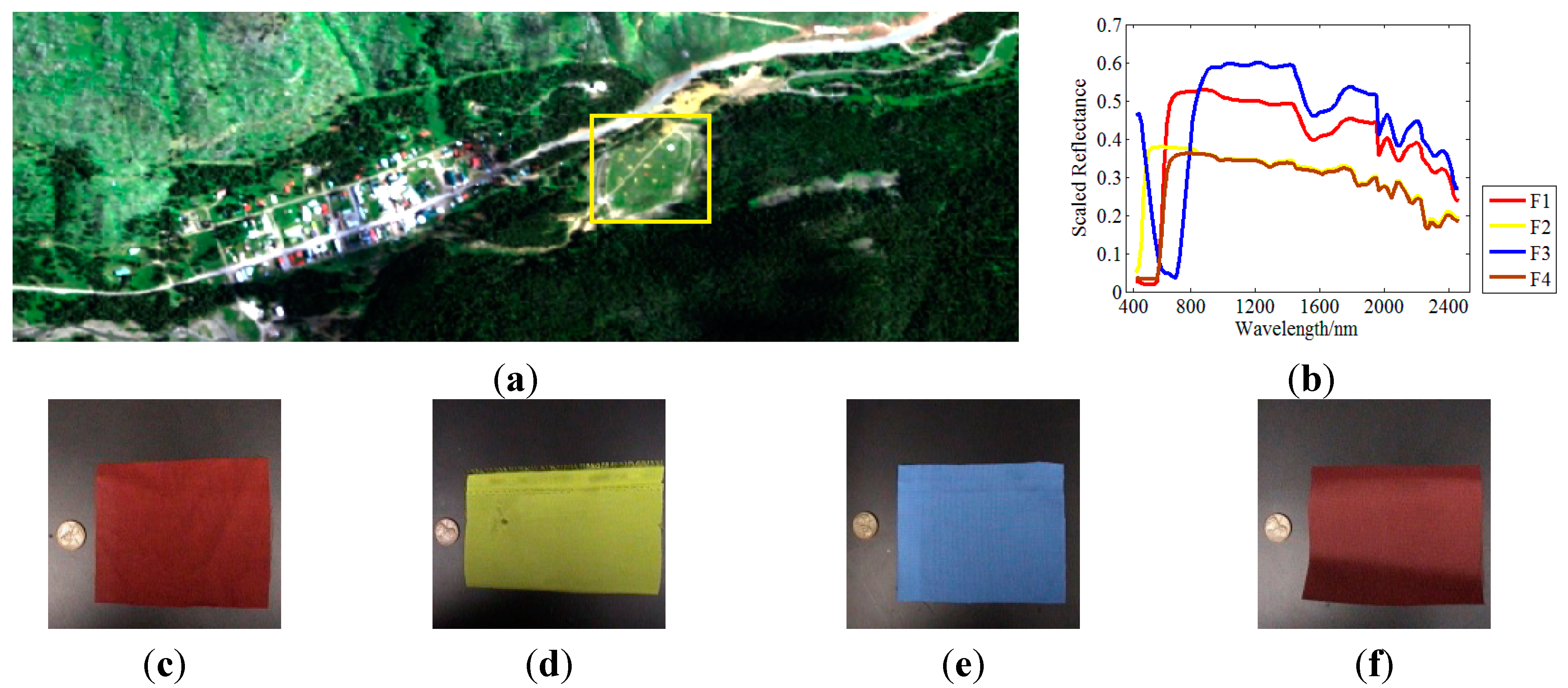
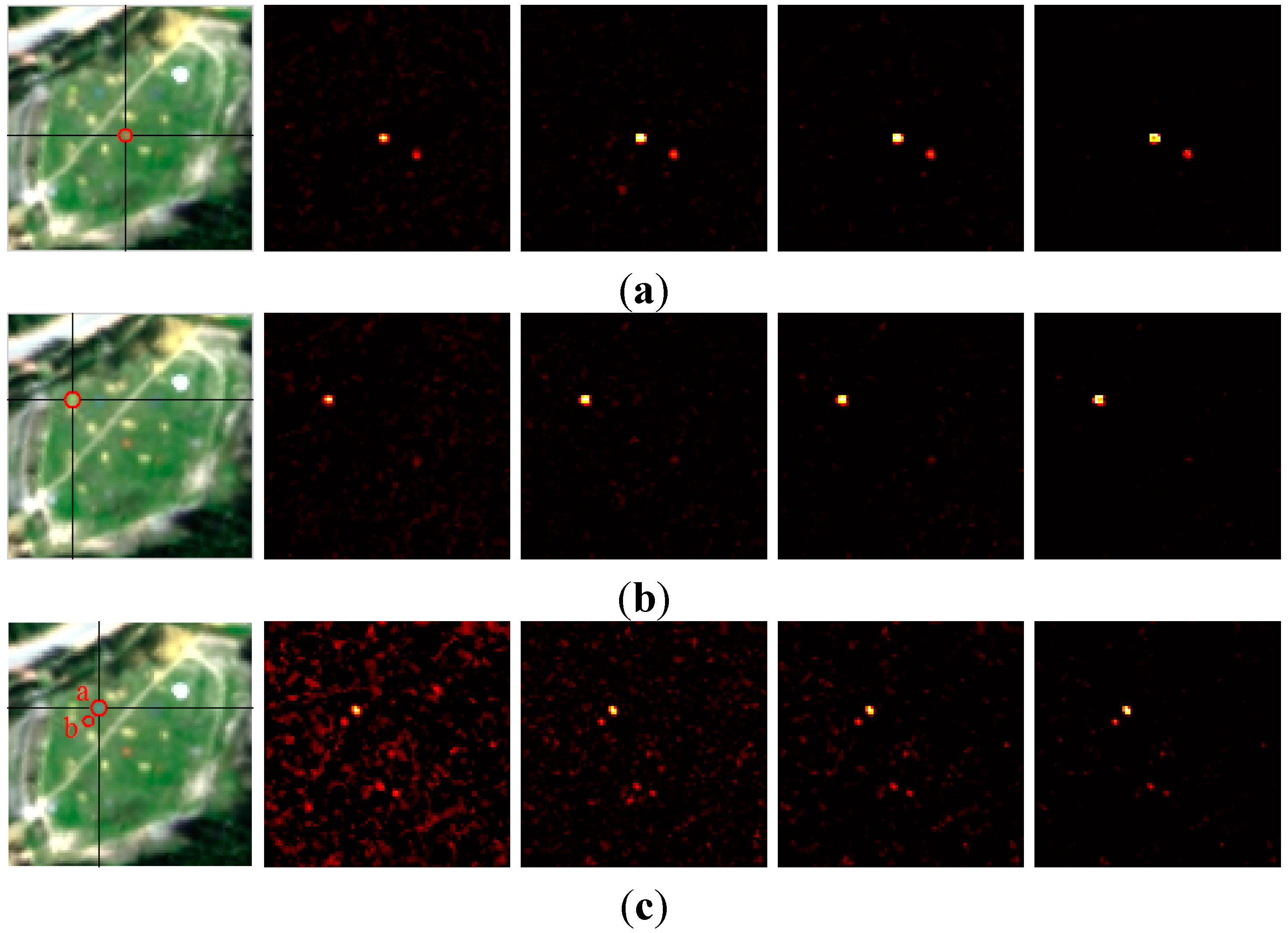
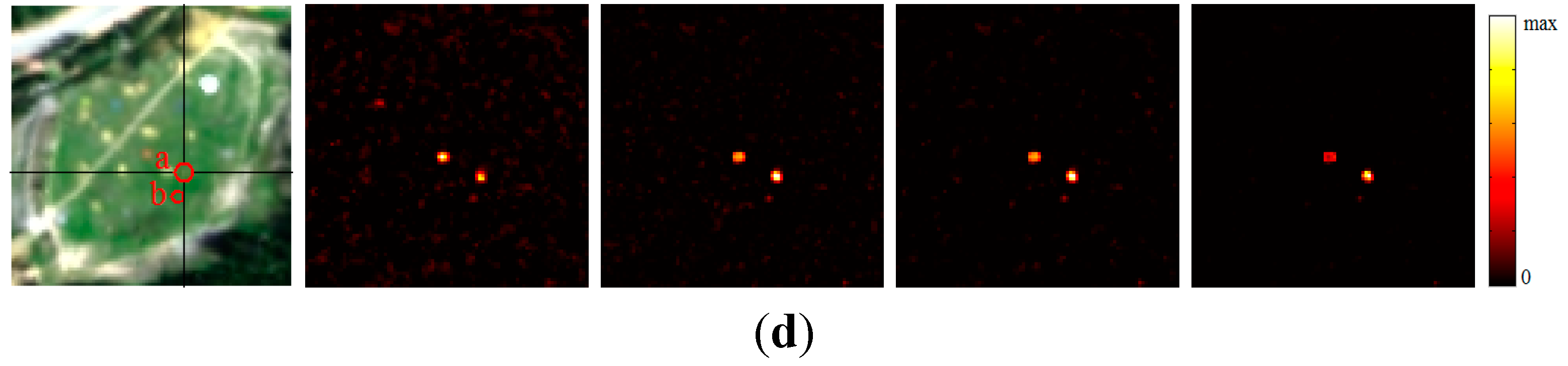
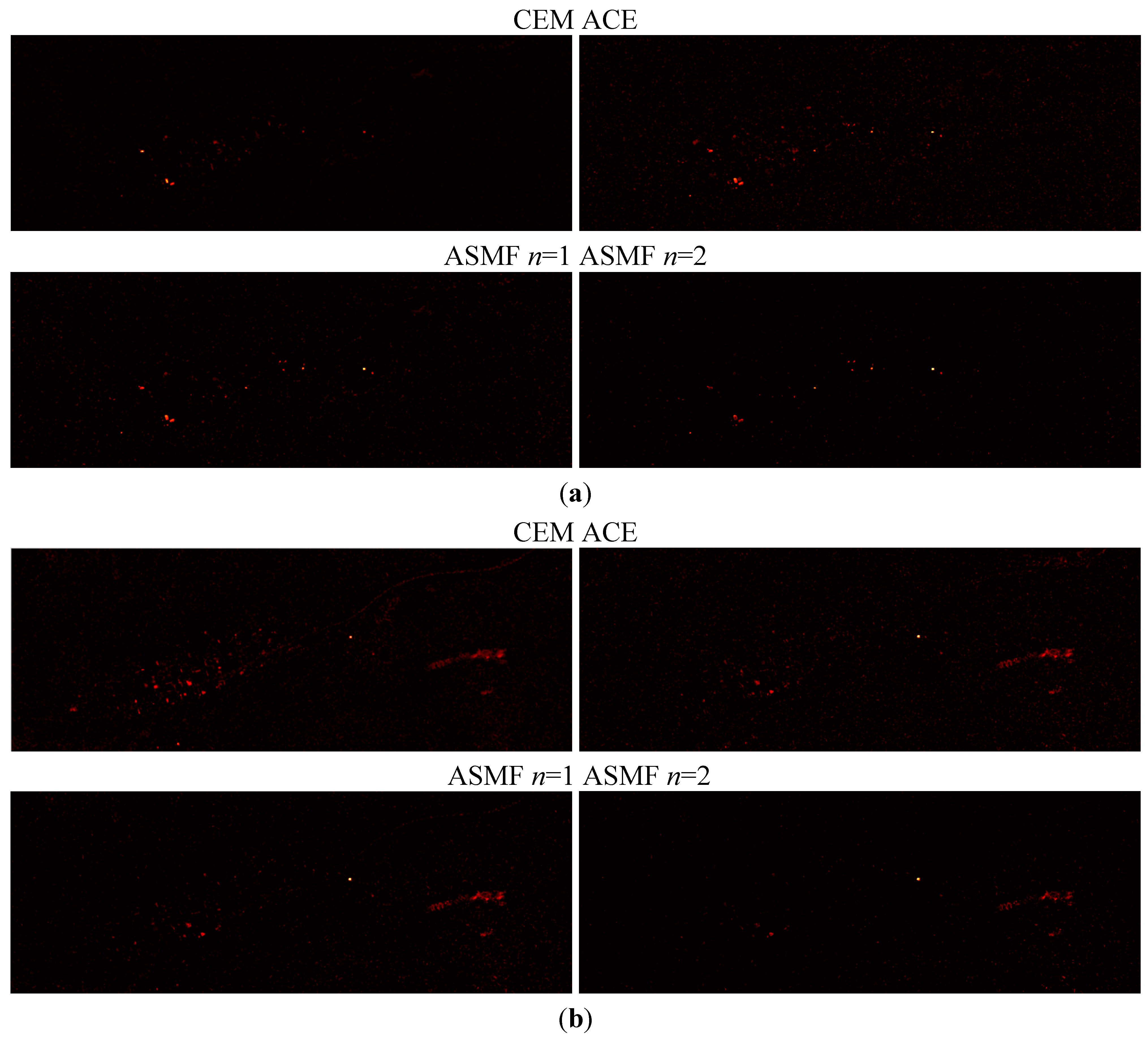
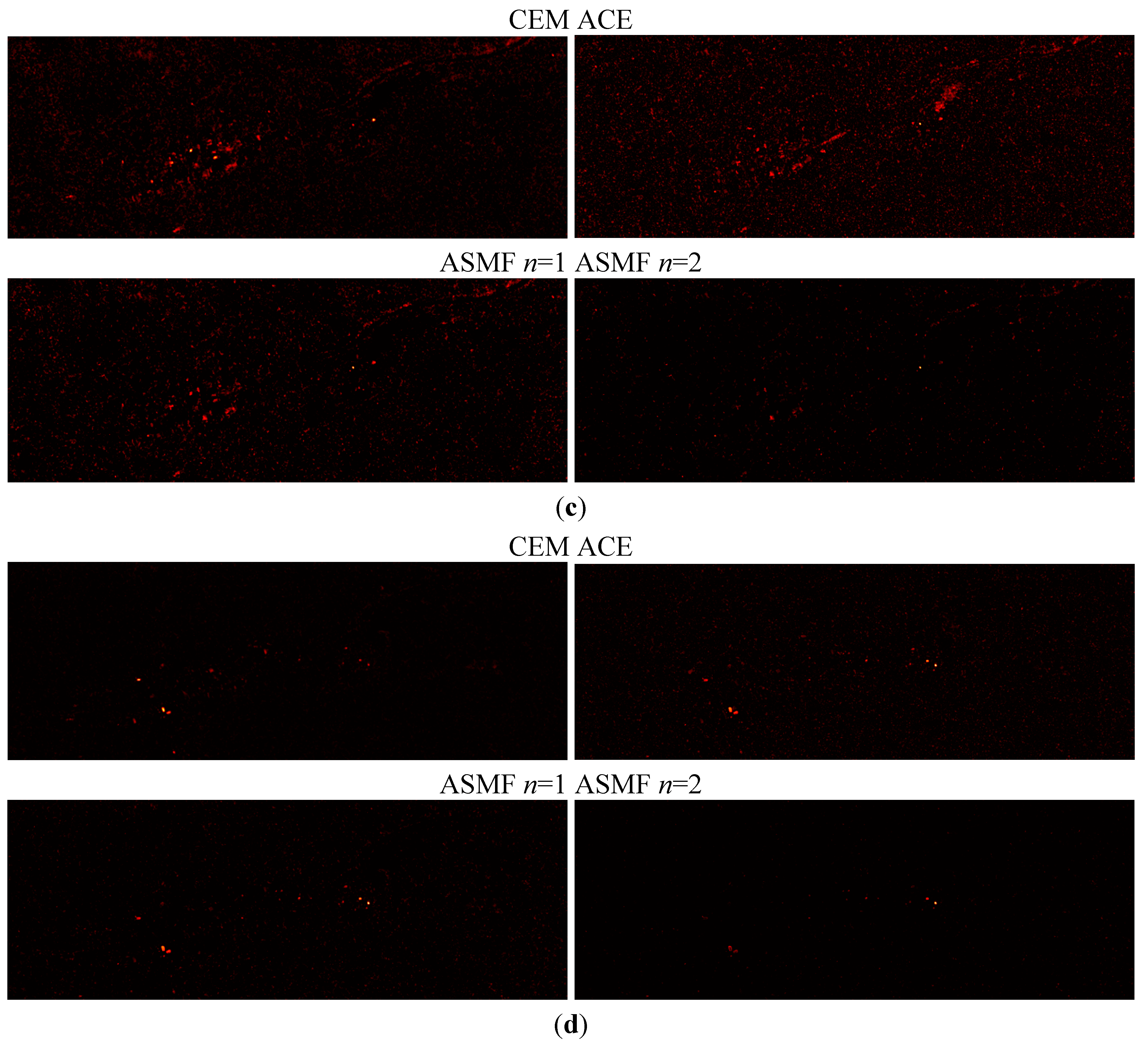
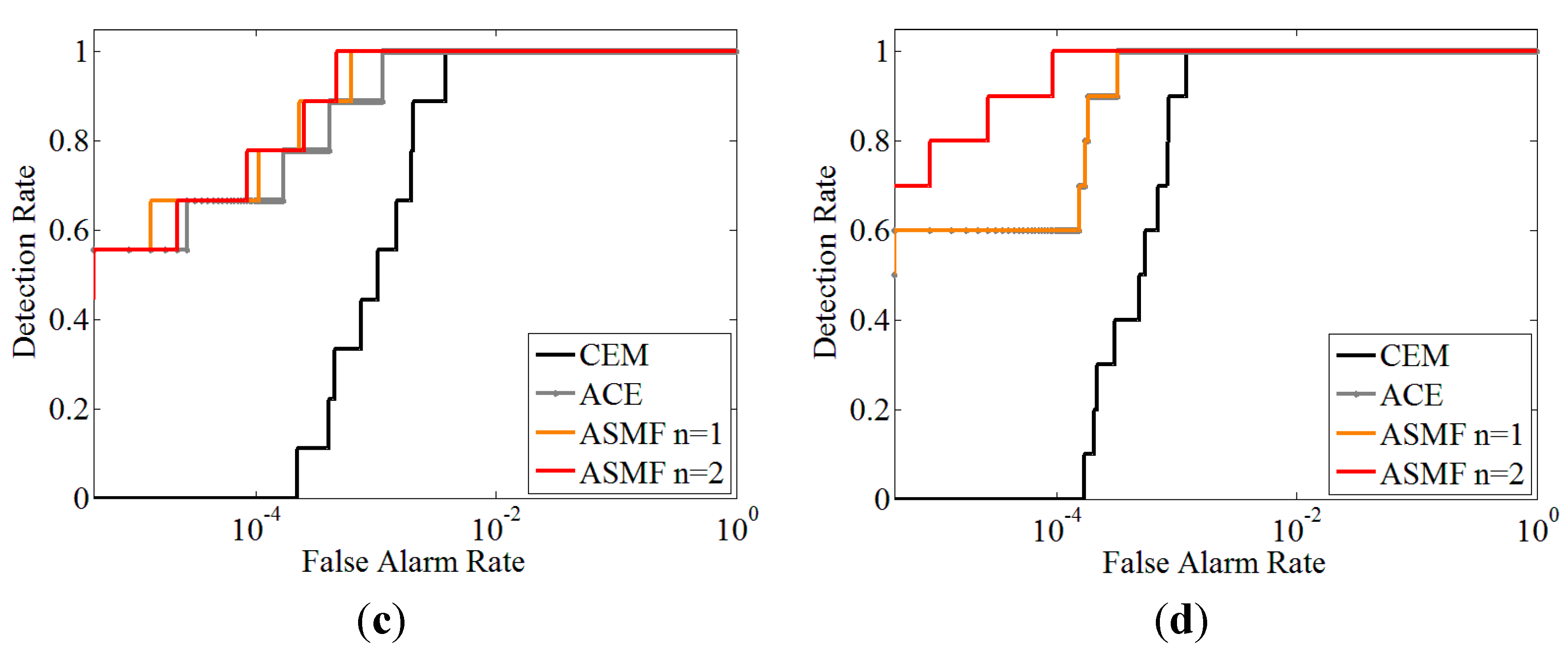
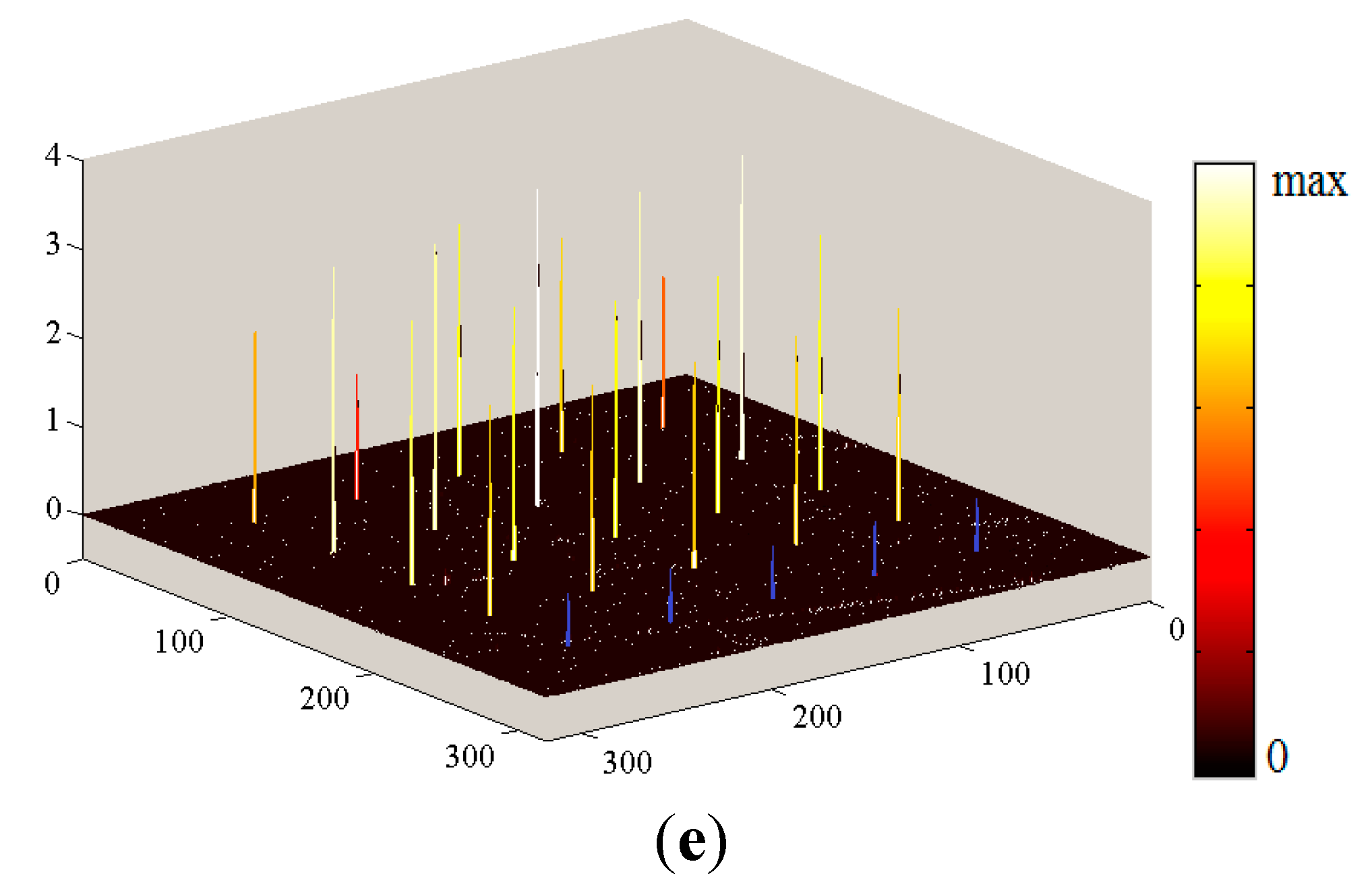
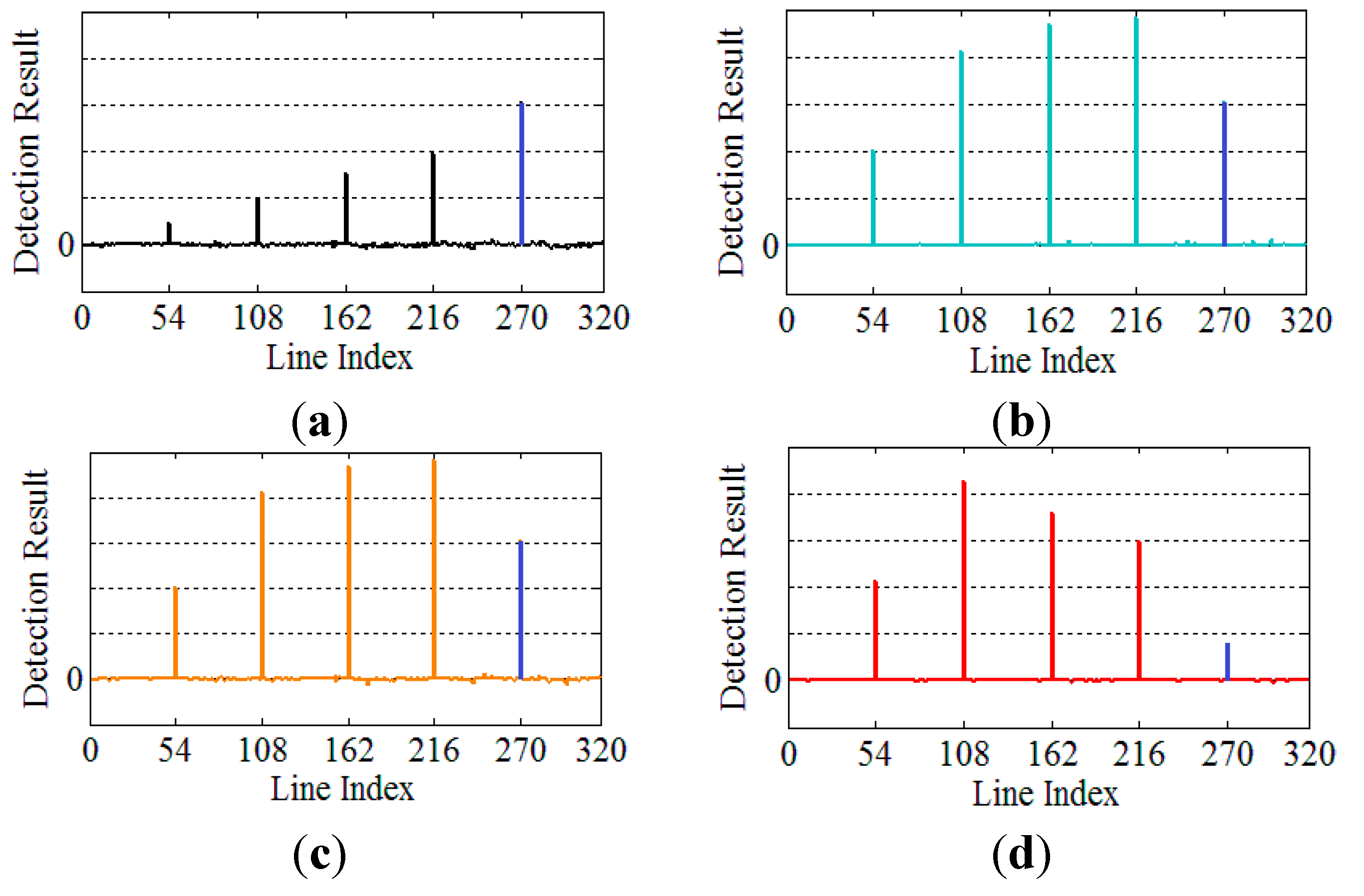
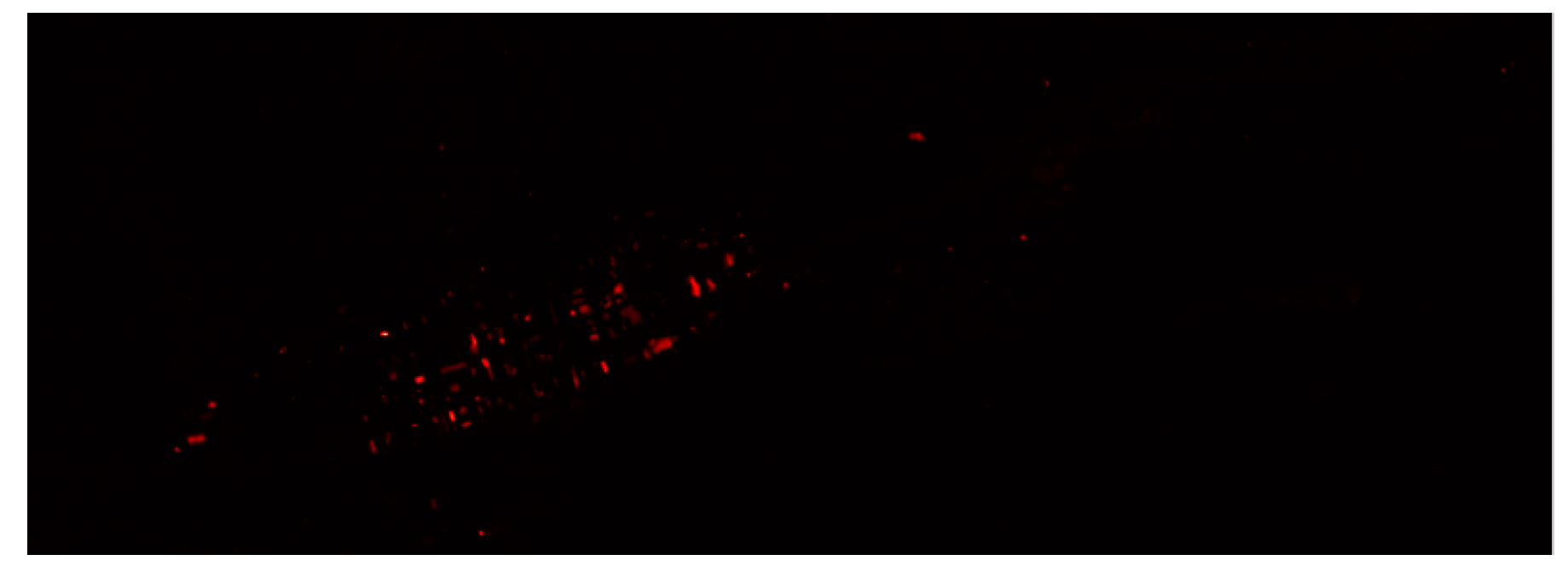
5.3. Experiment Using the Entire Image with Heterogeneous Background

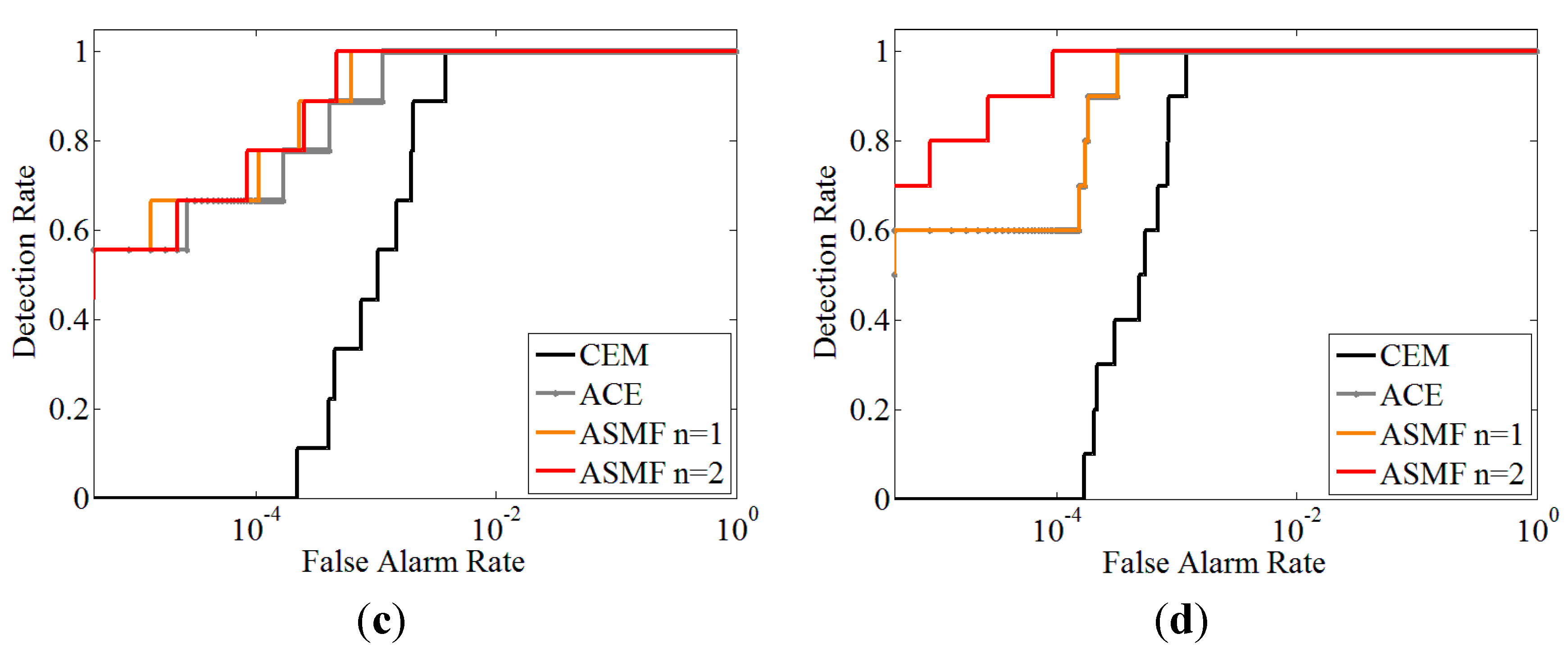
| Algorithms | CEM | ACE | ASMF n = 1 | ASMF n = 2 |
|---|---|---|---|---|
| F1 | 8.08 × 10−4 | 3.3 × 10−4 | 3.3 × 10−4 | 1.25 × 10−4 |
| F2 | 4.91 × 10−5 | 0 | 0 | 0 |
| F3 | 3.83 × 10−3 | 1.14 × 10−3 | 6.29 × 10−4 | 4.69 × 10−4 |
| F4 | 1.20 × 10−3 | 3.21 × 10−4 | 3.21 × 10−4 | 9.38 × 10−5 |
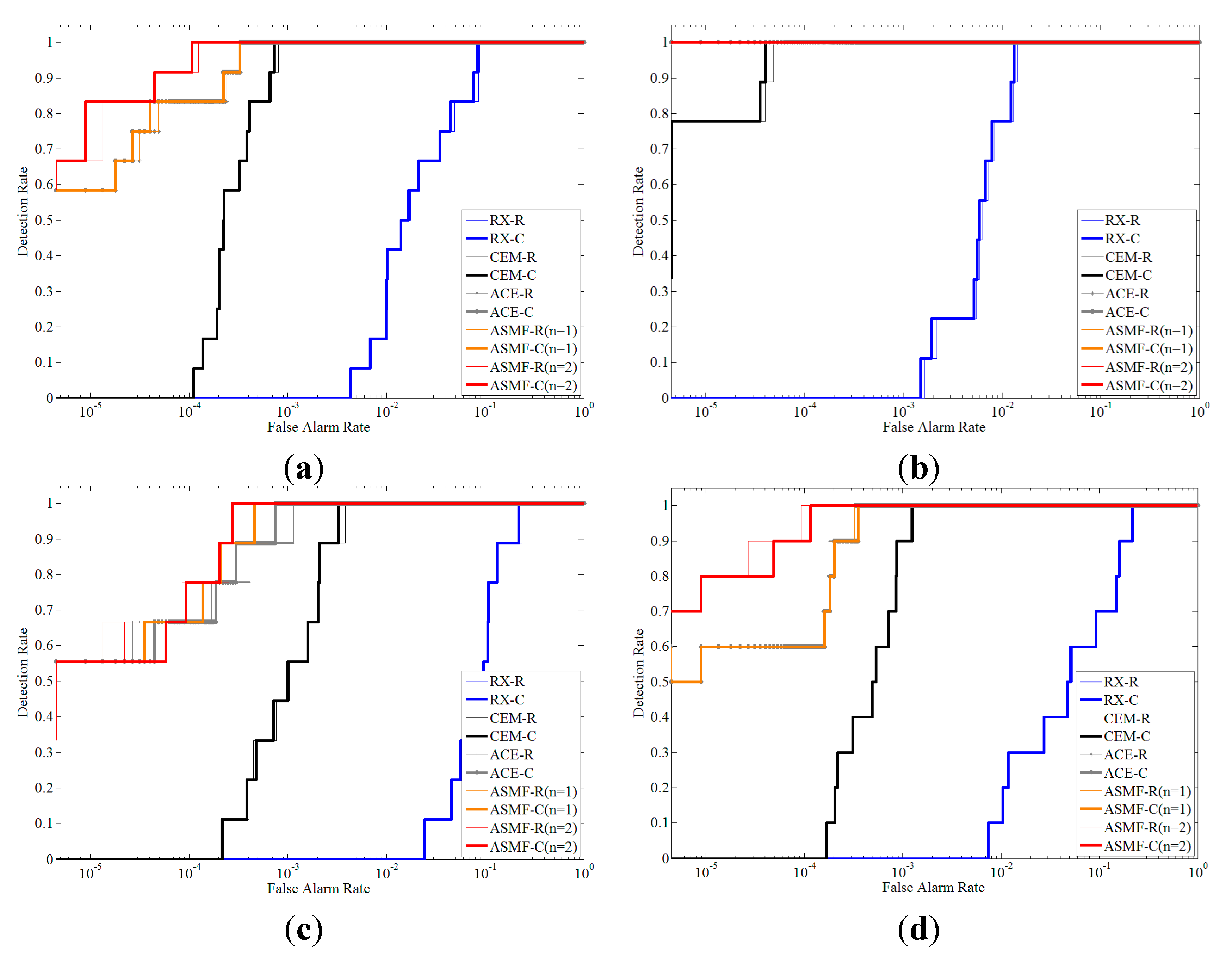
5.4. Analysis of Using Covariance Matrix
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Goetz, A.F.; Vane, G.; Solomon, J.E.; Rock, B.N. Imaging spectrometry for Earth remote sensing. Science 1985, 228, 1147–1153. [Google Scholar] [CrossRef] [PubMed]
- Manolakis, D.; Shaw, G. Detection algorithms for hyperspectral imaging applications. IEEE Signal. Proc. Mag. 2002, 19, 29–43. [Google Scholar] [CrossRef]
- Kerekes, J.P.; Baum, J.E. Spectral imaging system analytical model for subpixel object detection. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1088–1101. [Google Scholar] [CrossRef]
- Plaza, A.; Benediktsson, J.A.; Boardman, J.; Brazile, J.; Bruzzone, L.; Camps-Valls, G.; Chanussot, J.; Fauvel, M.; Gamba, P.; Gualtieri, J.; et al. Recent advances in techniques for hyperspectral image processing. Remote Sens. Environ. 2009, 113, 110–122. [Google Scholar] [CrossRef]
- Fauvel, M.; Tarabalka, Y.; Benediktsson, J.A.; Chanussot, J.; Tilton, J.C. Advances in spectral-spatial classification of hyperspectral images. Proc. IEEE 2013, 101, 652–675. [Google Scholar] [CrossRef]
- Bioucas-Dias, J.M.; Plaza, A.; Camps-Valls, G.; Scheunders, P.; Nasrabadi, N.M.; Chanussot, J. Hyperspectral remote sensing data analysis and future challenges. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–36. [Google Scholar] [CrossRef]
- Nasrabadi, N.M. Hyperspectral target detection: An overview of current and future challenges. IEEE Signal Process. Mag. 2014, 31, 34–44. [Google Scholar] [CrossRef]
- Eismann, M.T.; Stocker, A.D.; Nasrabadi, N.M. Automated hyperspectral cueing for civilian search and rescue. Proc. IEEE 2009, 97, 1031–1055. [Google Scholar] [CrossRef]
- Averbuch, A.; Zheludev, M. Two linear unmixing algorithms to recognize targets using supervised classification and orthogonal rotation in airborne hyperspectral images. Remote Sens. 2012, 4, 532–560. [Google Scholar] [CrossRef]
- Scharf, L.L.; Friedlander, B. Matched subspace detectors. IEEE Trans. Signal Process. 1994, 42, 2146–2157. [Google Scholar] [CrossRef]
- Robey, F.C.; Fuhrmann, D.R.; Kelly, E.J. A CFAR adaptive matchedfilter detector. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 208–216. [Google Scholar] [CrossRef]
- Chang, C.I.; Ren, H.; Chiang, S.S. Real-time processing algorithms for target detection and classification in hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2001, 39, 760–768. [Google Scholar] [CrossRef]
- Du, Q.; Nekovei, R. Fast real-time onboard processing of hyperspectral imagery for detection and classification. J. Real-Time Image Process. 2009, 4, 273–286. [Google Scholar] [CrossRef]
- Harsanyi, J.C.; Chang, C.I. Hyperspectral image classification and dimensionality reduction: An orthogonal subspace projection approach. IEEE Trans. Geosci. Remote Sens. 1994, 32, 779–785. [Google Scholar] [CrossRef]
- Chang, C.I. Orthogonal subspace projection (OSP) revisited: A comprehensive study and analysis. IEEE Trans. Geosci. Remote Sens. 2005, 43, 502–518. [Google Scholar] [CrossRef]
- Kelly, E.J. An adaptive detection algorithm. IEEE Trans. Aerosp. Electron. Syst. 1986, AES-22, 115–127. [Google Scholar] [CrossRef]
- Chen, Y.; Nasrabadi, N.M.; Tran, T.D. Effects of linear projections on the performance of target detection and classification in hyperspectral imagery. J. Appl. Remote Sens. 2011, 5. [Google Scholar] [CrossRef]
- Du, Q.; Chang, C.-I. A signal-decomposed and interference-annihilated approach to hyperspectral target detection. IEEE Trans. Geosci. Remote Sens. 2004, 42, 892–906. [Google Scholar]
- Banerjee, A.; Burlina, P.; Diehl, C. A support vector method for anomaly detection in hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2282–2291. [Google Scholar] [CrossRef]
- Kwon, H.; Nasrabadi, N.M. A comparative analysis of kernel subspace target detectors for hyperspectral imagery. EURASIP J. Adv. Signal Process. 2007, 2007. [Google Scholar] [CrossRef]
- Reed, S.; Yu, X. Adaptive multiple-band CFAR detection of an optical pattern with unknown spectral distribution. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1760–1770. [Google Scholar] [CrossRef]
- Matteoli, S.; Diani, M.; Corsini, G. A tutorial overview of anomaly detection in hyperspectral images. IEEE Aerosp. Electron. Syst. Mag. 2010, 25, 5–27. [Google Scholar] [CrossRef]
- Stein, D.W.J.; Beaven, S.G.; Hoff, L.E.; Winter, E.M.; Schaum, A.P.; Stocker, A.D. Anomaly detection from hyperspectral imagery. IEEE Signal Process. Mag. 2002, 19, 58–69. [Google Scholar] [CrossRef]
- Schaum, A. Joint subspace detection of hyperspectral targets. In Proceeding of 2004 IEEE Aerospace Conference Proceedings, Big Sky, MT, USA, 6–13 March 2004; Volume 3, pp. 1818–1824.
- Schaum, A. Hyperspectral anomaly detection beyond RX. Proc. SPIE 2007, 6565. [Google Scholar] [CrossRef]
- Matteoli, S.; Diani, M.; Corsini, G. Different approaches for improved covariance matrix estimation in hyperspectral anomaly detection. In Proceedings of the Annual Meeting of the Italian National Telecommunications and Information Theory Group (GTTI’09), Parma, Italy, 23–25 June 2009; pp. 1–8.
- Hansen, P.C. Rank-Deficient and Discrete III-Posed Problems: Numerical Aspects of Linear Inversion; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1998. [Google Scholar]
- Goldberg, H.; Nasrabadi, N.M. A comparative study of linear and nonlinear anomaly detectors for hyperspectral imagery. Proc. SPIE 2007, 6565. [Google Scholar] [CrossRef]
- Kwon, H.; Nasrabadi, N.M. Kernel RX-algorithm: A nonlinear anomaly detector for hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2005, 43, 388–397. [Google Scholar] [CrossRef]
- Manolakis, D.; Siracusa, C.; Shaw, G. Hyperspectral subpixel target detection using the linear mixing model. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1392–1409. [Google Scholar] [CrossRef]
- Du, Q.; Kopriva, I. Automated target detection and discrimination using constrained kurtosis maximization. IEEE Geosci. Remote Sens. Lett. 2008, 5, 38–42. [Google Scholar] [CrossRef]
- Chang, C.I.; Chiang, S.S. Anomaly detection and classification for hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1314–1325. [Google Scholar] [CrossRef]
- Scharf, L.L.; McWhorter, L.T. Adaptive matched subspace detectors and adaptive coherence estimators. In Proceedings of the Thirtieth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 3–6 November 1996; Volume 2, pp. 1114–1117.
- Zhang, L.; Du, B.; Zhong, Y. Hybrid detectors based on selective endmembers. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2633–2646. [Google Scholar] [CrossRef]
- Matteoli, S.; Acito, N.; Diani, M.; Corsini, G. An automatic approach to adaptive local background estimation and suppression in hyperspectral target detection. IEEE Trans. Geosci. Remote Sens. 2011, 49, 790–899. [Google Scholar]
- Snyder, D.; Kerekes, J.; Fairweather, I.; Crabtree, R.; Shive, J.; Hager, S. Development of a web-based application to evaluate target finding algorithms. In Proceedings of IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Boston, MA, USA, 7–11 July 2008; Volume 2, pp. 915–918.
- Eismann, M.T. Hyperspectral Remote Sensing; SPIE Press: Washington, DC, USA, 2012; pp. 620–624. [Google Scholar]
- Green, R.O.; Eastwood, M.L.; Sarture, C.M.; Chrien, T.G.; Aronsson, M.; Chippendale, B.J.; Faust, J.A.; Pavri, B.E.; Chovit, C.J.; Solis, M.; Olah, M.R.; Williams, O. Imaging spectroscopy and the Airborne Visible/Infrared Imaging Spectrometer (AVIRIS). Remote Sens. Environ. 1998, 65, 227–248. [Google Scholar] [CrossRef]
- Stefanou, M.S.; Kerekes, J.P. A method for assessing spectral image utility. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1698–1706. [Google Scholar] [CrossRef]
- Chen, G.; Qian, S.E. Denoising of hyperspectral imagery using principal component analysis and wavelet shrinkage. IEEE Trans. Geosci. Remote Sens. 2011, 49, 973–980. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L.; Tao, D.; Huang, X. Sparse transfer manifold embedding for hyperspectral target detection. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1030–1043. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L.; Tao, D.; Huang, X.; Du, B. Hyperspectral remote sensing image subpixel target detection based on supervised metric learning. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4955–4965. [Google Scholar] [CrossRef]
- Khazai, S.; Homayouni, S.; Safari, A.; Mojaradi, B. Anomaly detection in hyperspectral images based on an adaptive support vector method. IEEE Geosci. Remote Sens. Lett. 2011, 8, 646–650. [Google Scholar] [CrossRef]
- Khazai, S.; Safari, A.; mojaradi, B.; Homayouni, S. An approach for subpixel anomaly detection in hyperspectral images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 769–778. [Google Scholar] [CrossRef]
- Cocks, T.; Jenssen, R.; Stewart, A.; Wilson, I.; Shields, T. The HyMap airborne hyperspectral sensor: The system, calibration and performance. In Proceedings of 1st EARSEL Workshop on Imaging Spectroscopy, Zurich, Switzerland, October 1998; pp. 37–42.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, L.; Yang, B.; Du, Q.; Zhang, B. Adjusted Spectral Matched Filter for Target Detection in Hyperspectral Imagery. Remote Sens. 2015, 7, 6611-6634. https://doi.org/10.3390/rs70606611
Gao L, Yang B, Du Q, Zhang B. Adjusted Spectral Matched Filter for Target Detection in Hyperspectral Imagery. Remote Sensing. 2015; 7(6):6611-6634. https://doi.org/10.3390/rs70606611
Chicago/Turabian StyleGao, Lianru, Bin Yang, Qian Du, and Bing Zhang. 2015. "Adjusted Spectral Matched Filter for Target Detection in Hyperspectral Imagery" Remote Sensing 7, no. 6: 6611-6634. https://doi.org/10.3390/rs70606611