
Geometric Quality Analysis of AVHRR Orthoimages


Abstract
:
1. Introduction
1.1. Motivation and Background
1.2. AVHRR Sensor and Data Characteristics

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band Number | Resolution at Nadir (km) | Wavelength (µm) | Typical Use |
|---|---|---|---|
| 1 | 1.09 | 0.58–0.68 | Daytime cloud and surface mapping |
| 2 | 1.09 | 0.725–1.00 | Land-water boundaries |
| 3A | 1.09 | 1.58–1.64 | Snow and ice detection |
| 3B | 1.09 | 3.55–3.93 | Night cloud mapping, sea surface temperature |
| 4 | 1.09 | 10.30–11.30 | Night cloud mapping, sea surface temperature |
| 5 | 1.09 | 11.50–12.50 | Sea surface temperature |
2. Methodology
- Load 16-bit images
- Linear stretching (the grey values usually cover <2% of the histogram)
- Conversion to 8-bit (due to software implementation issues, easier visualization and less data, without significant loss of information)
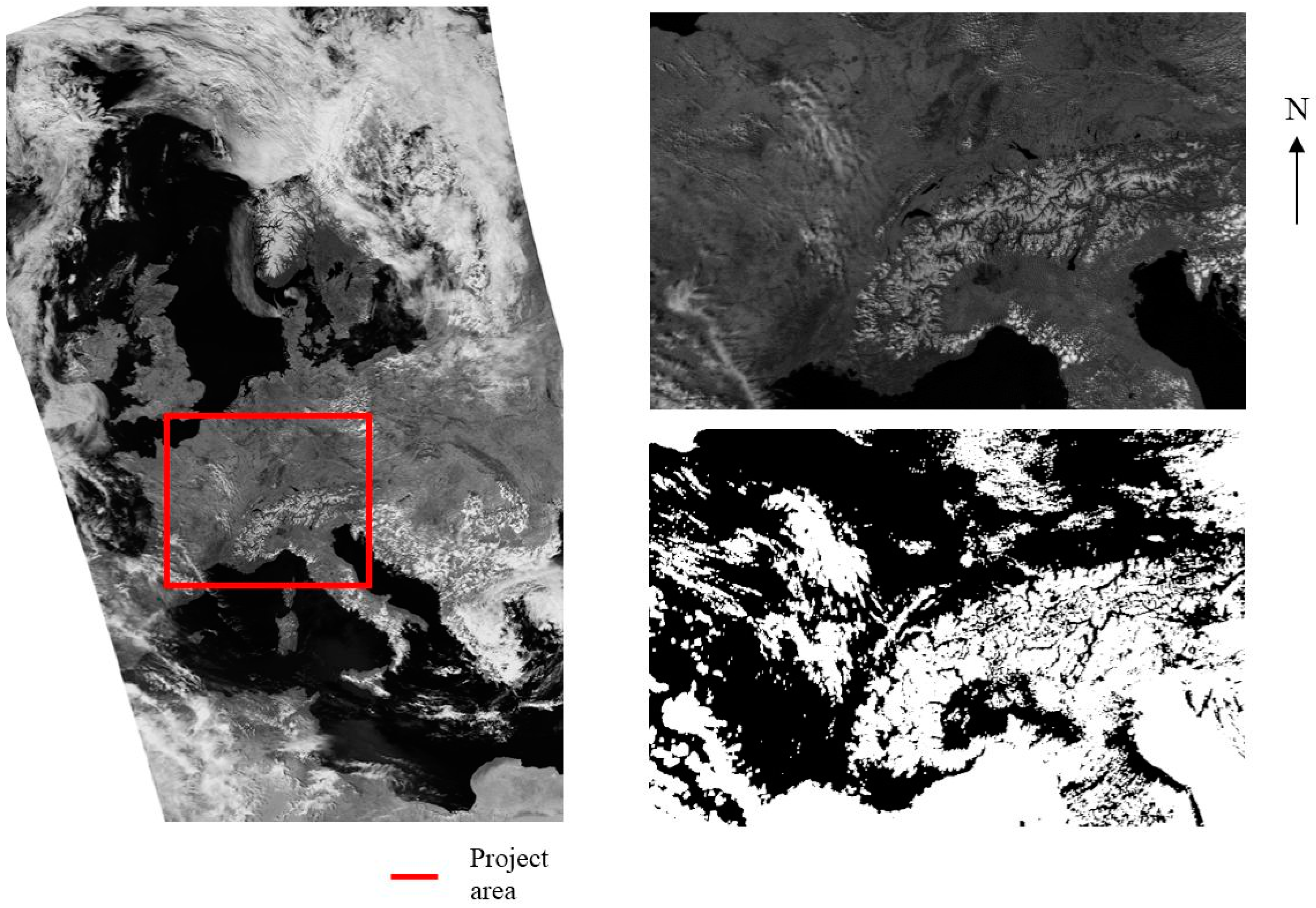
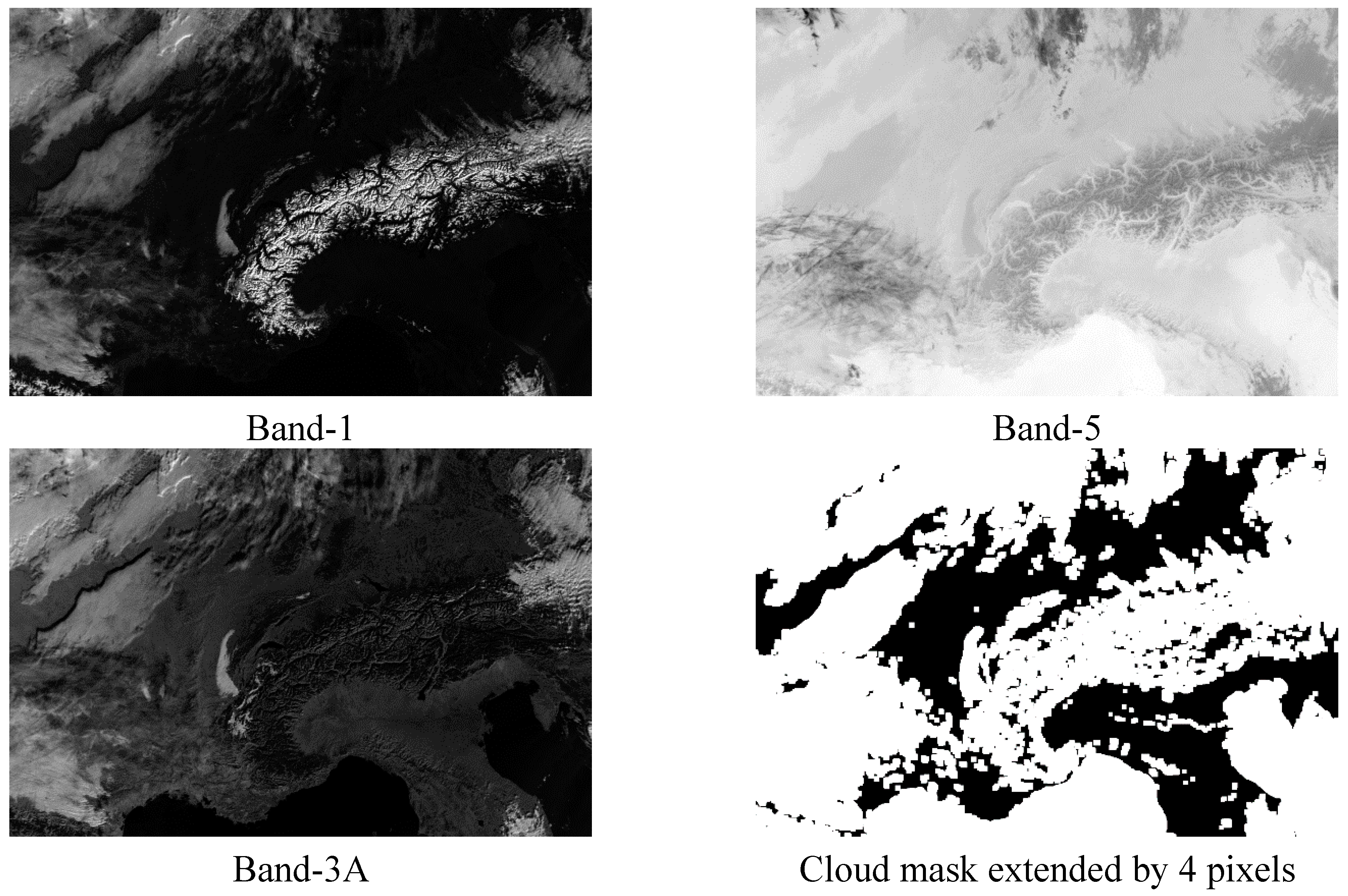
- Extract cloud mask data (different masks for KLT tracking method and lake matching)
- Crop both the image and the cloud mask data
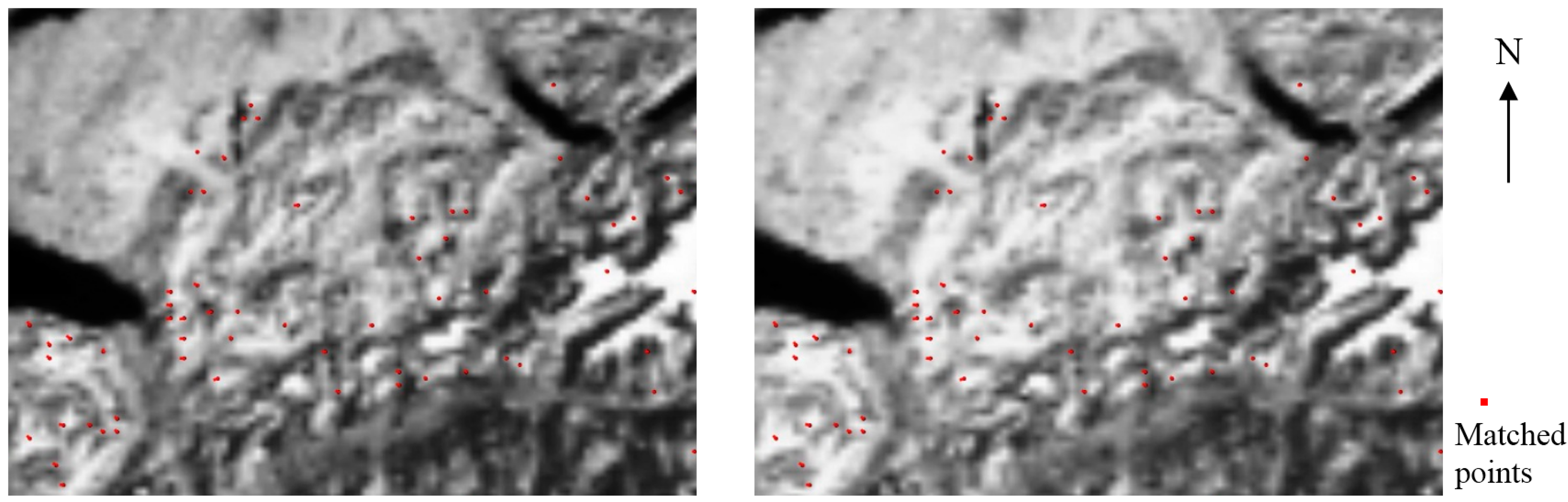
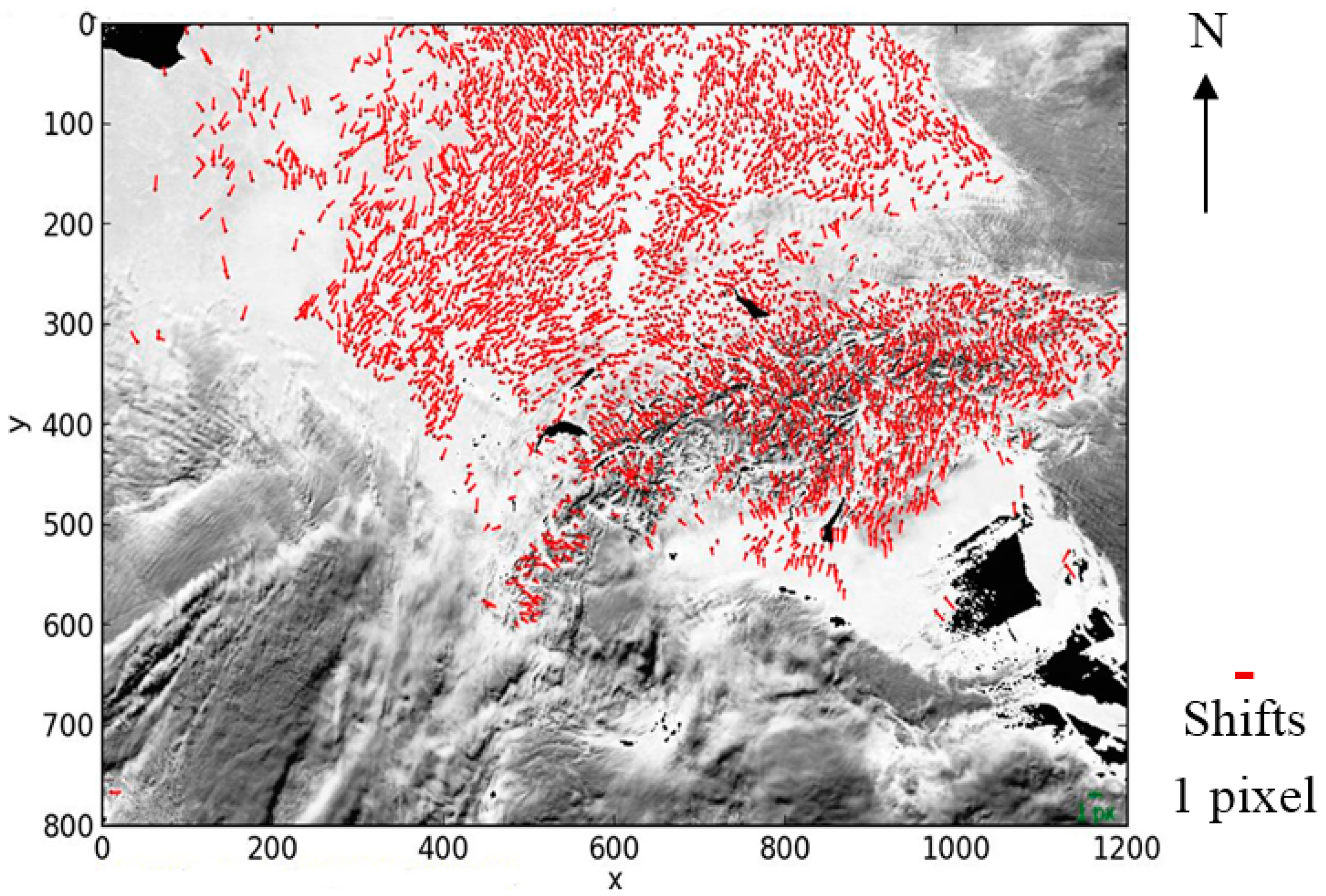
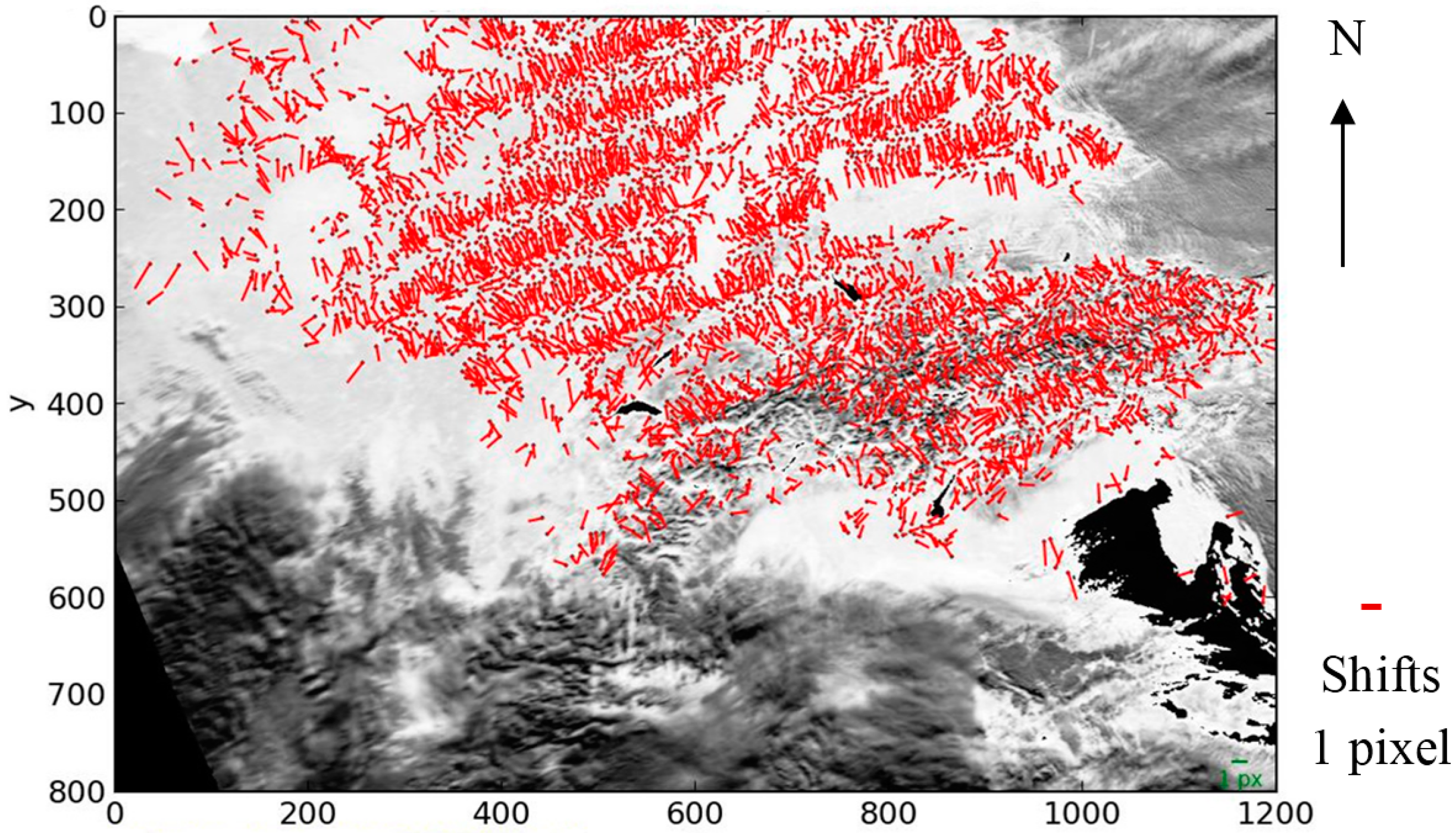
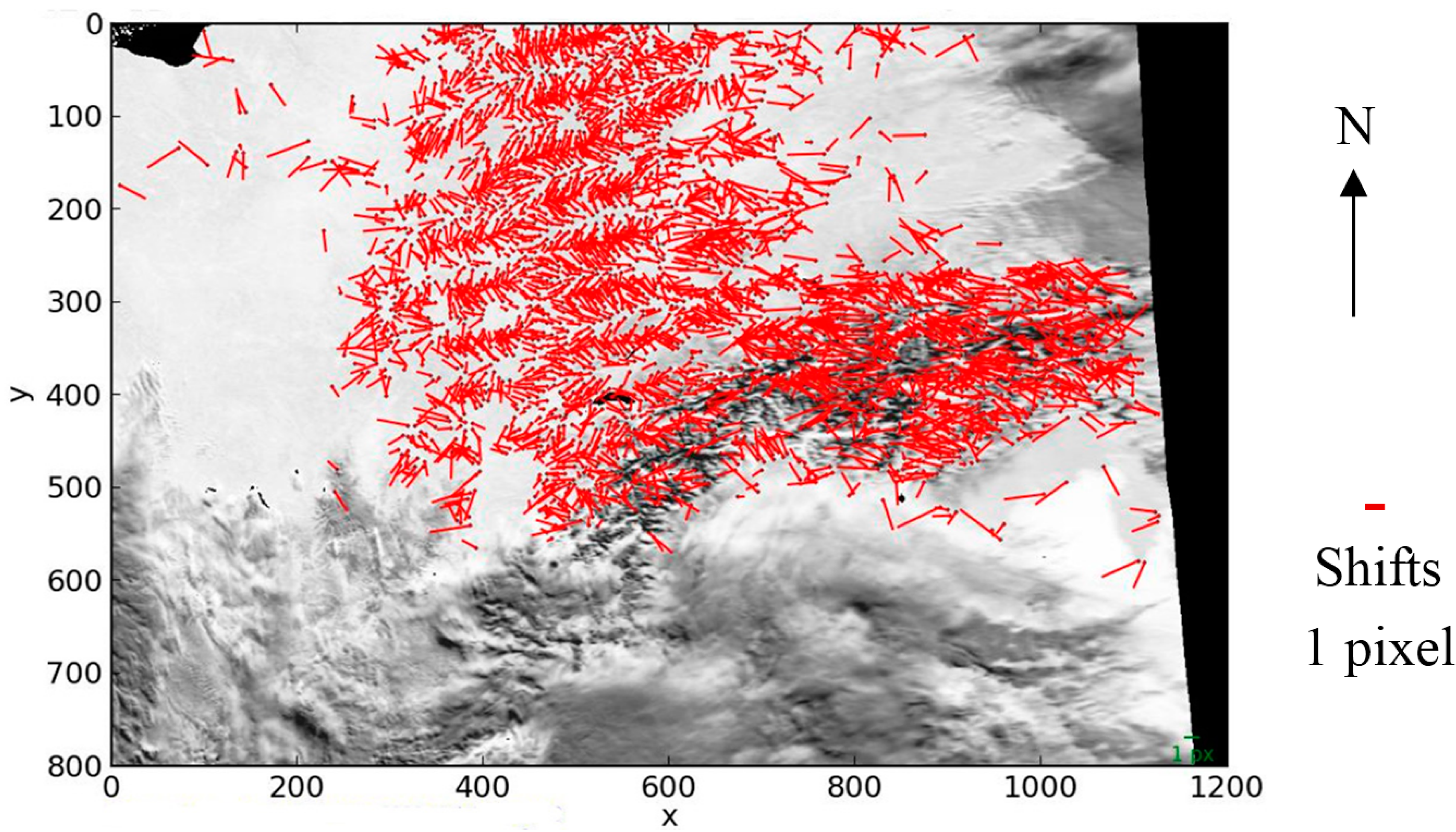
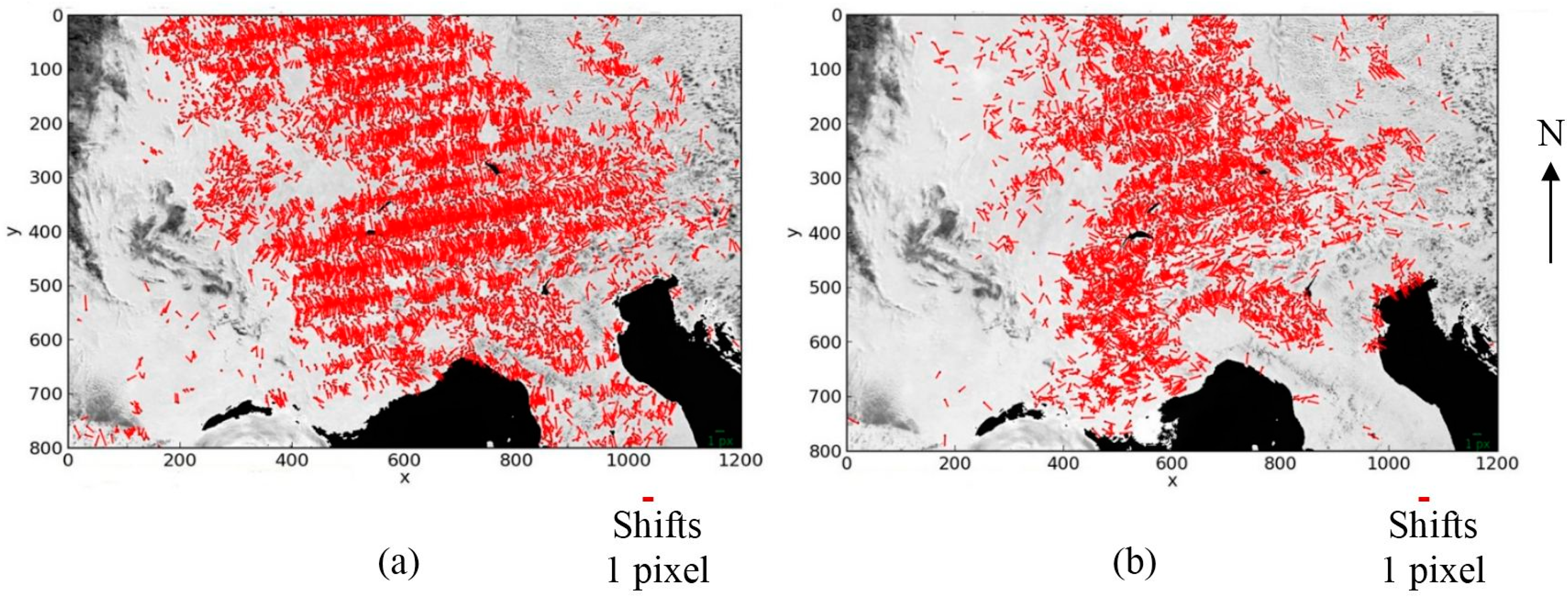
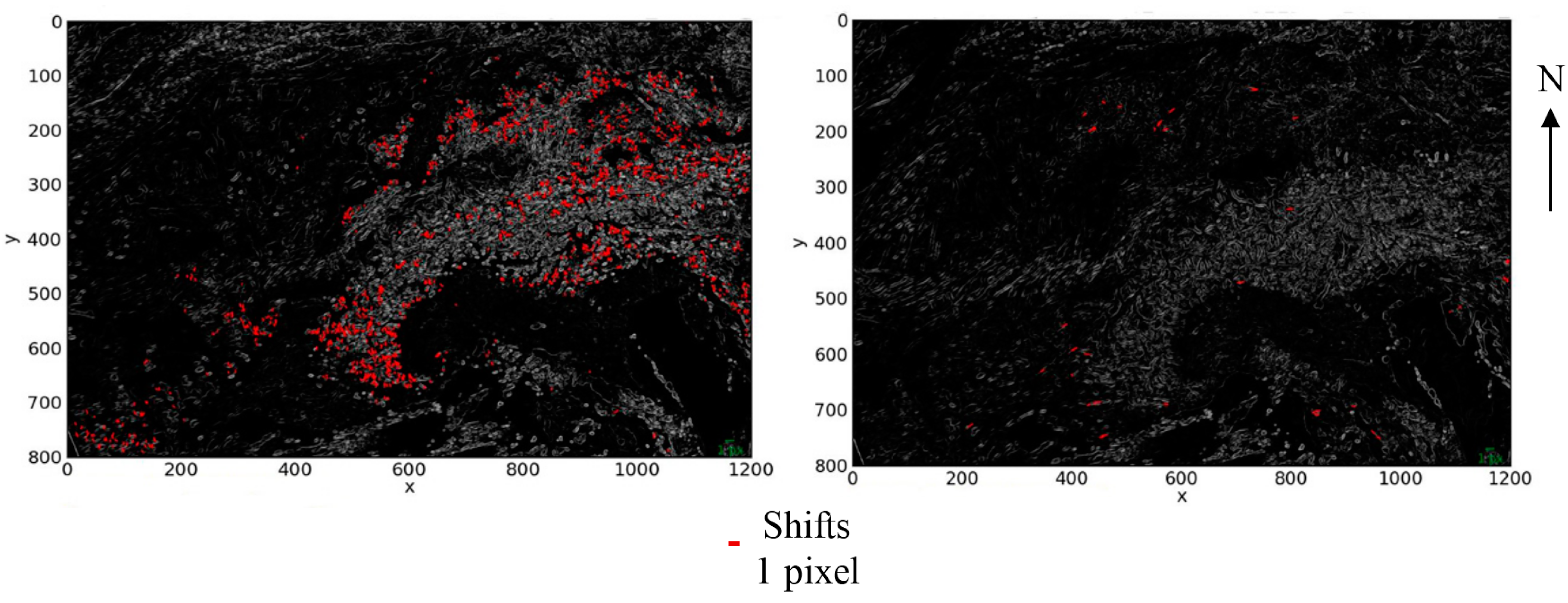
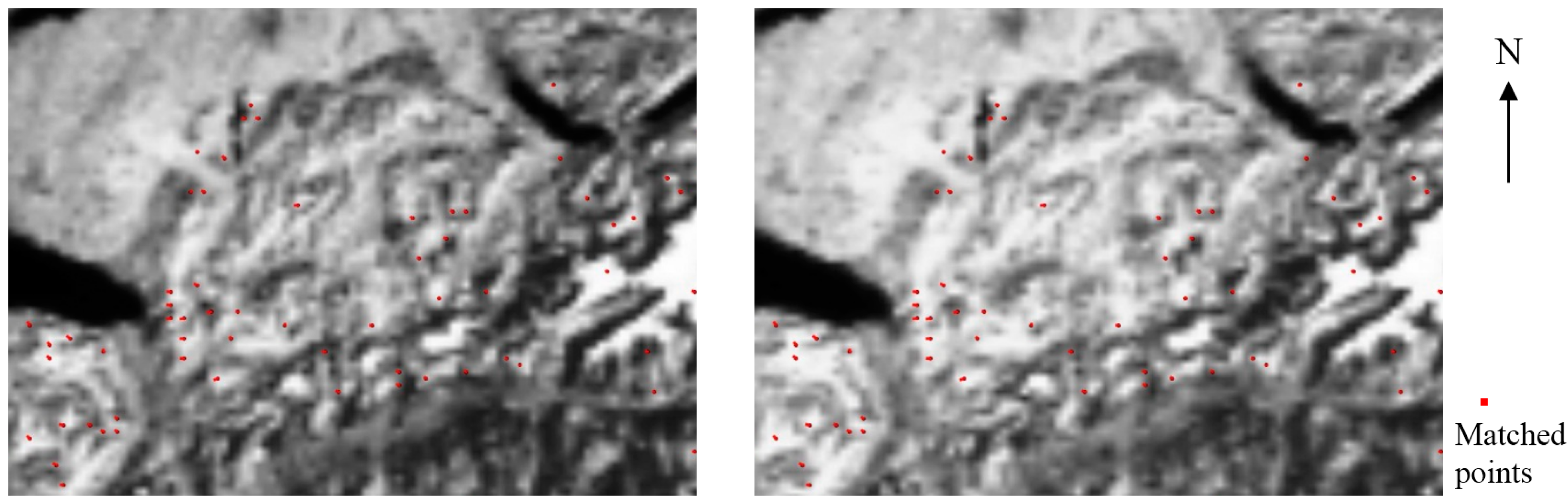
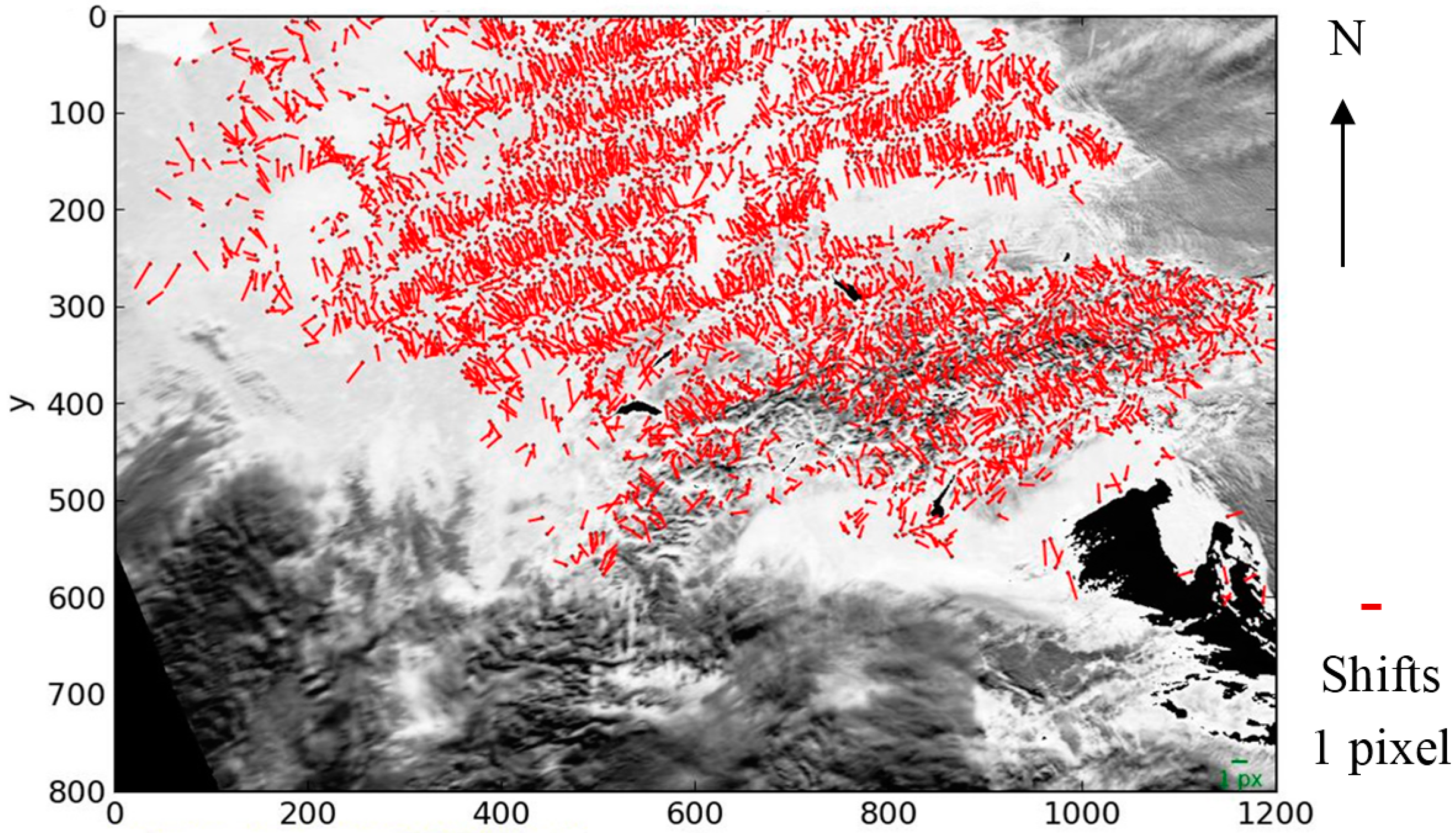
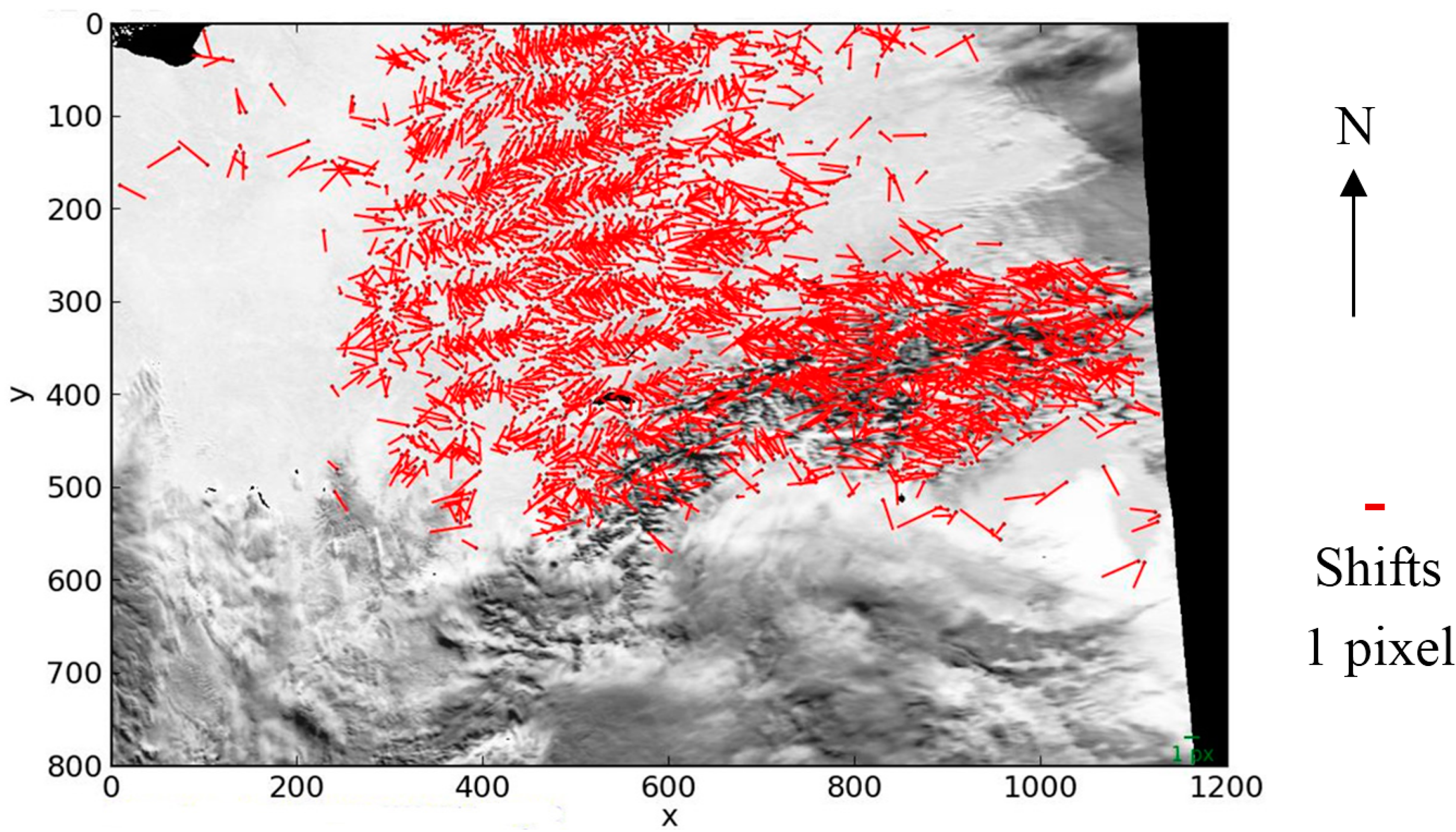
2.1. Relative Accuracy

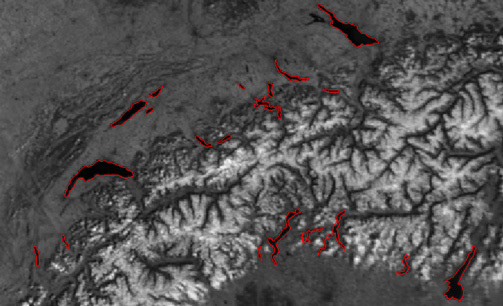
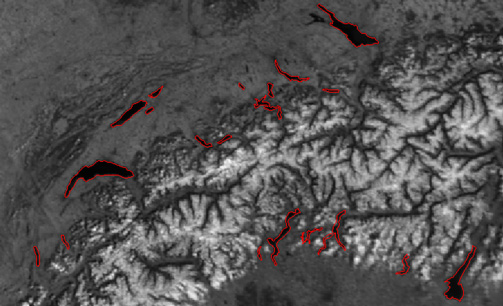
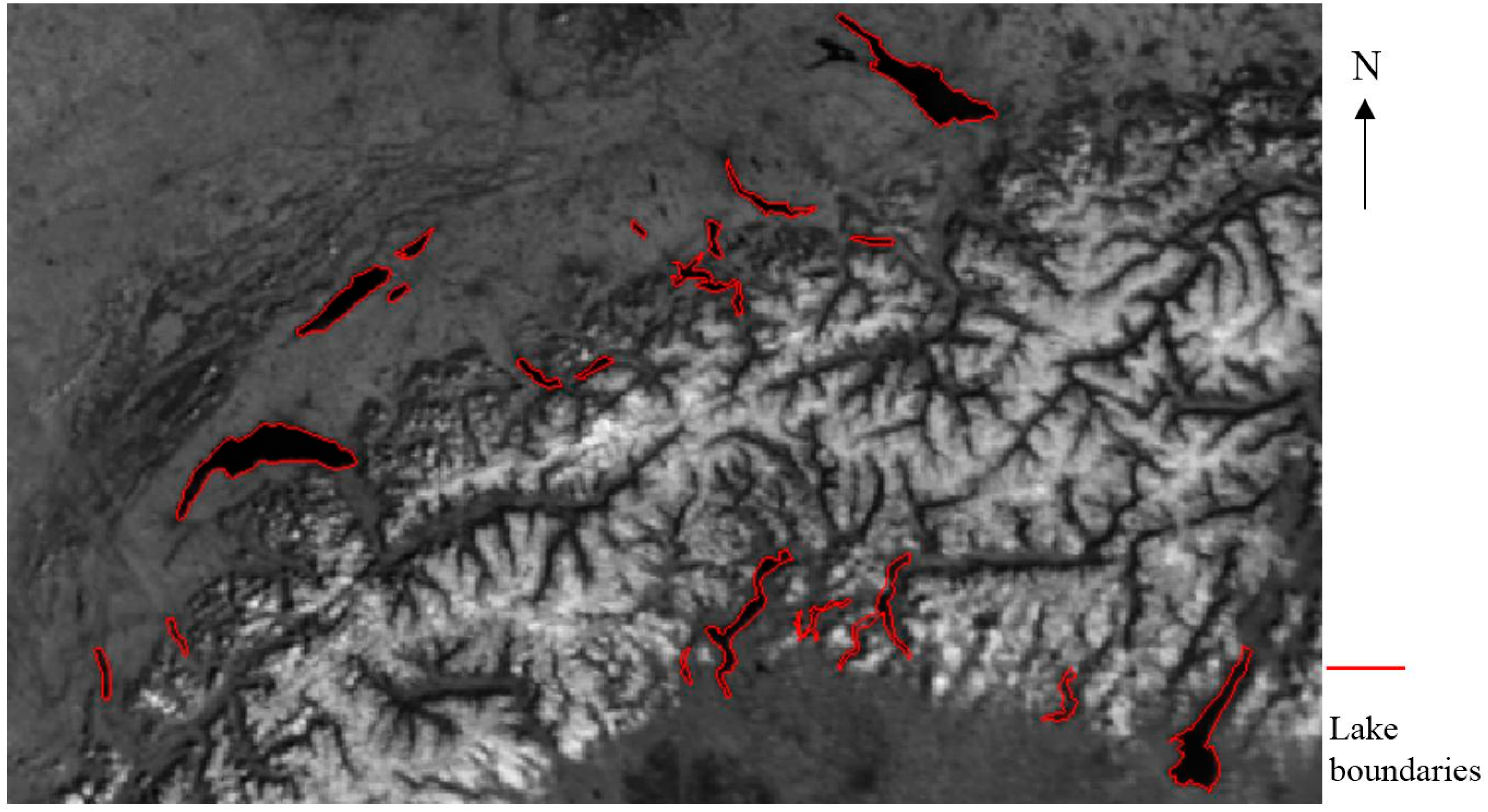
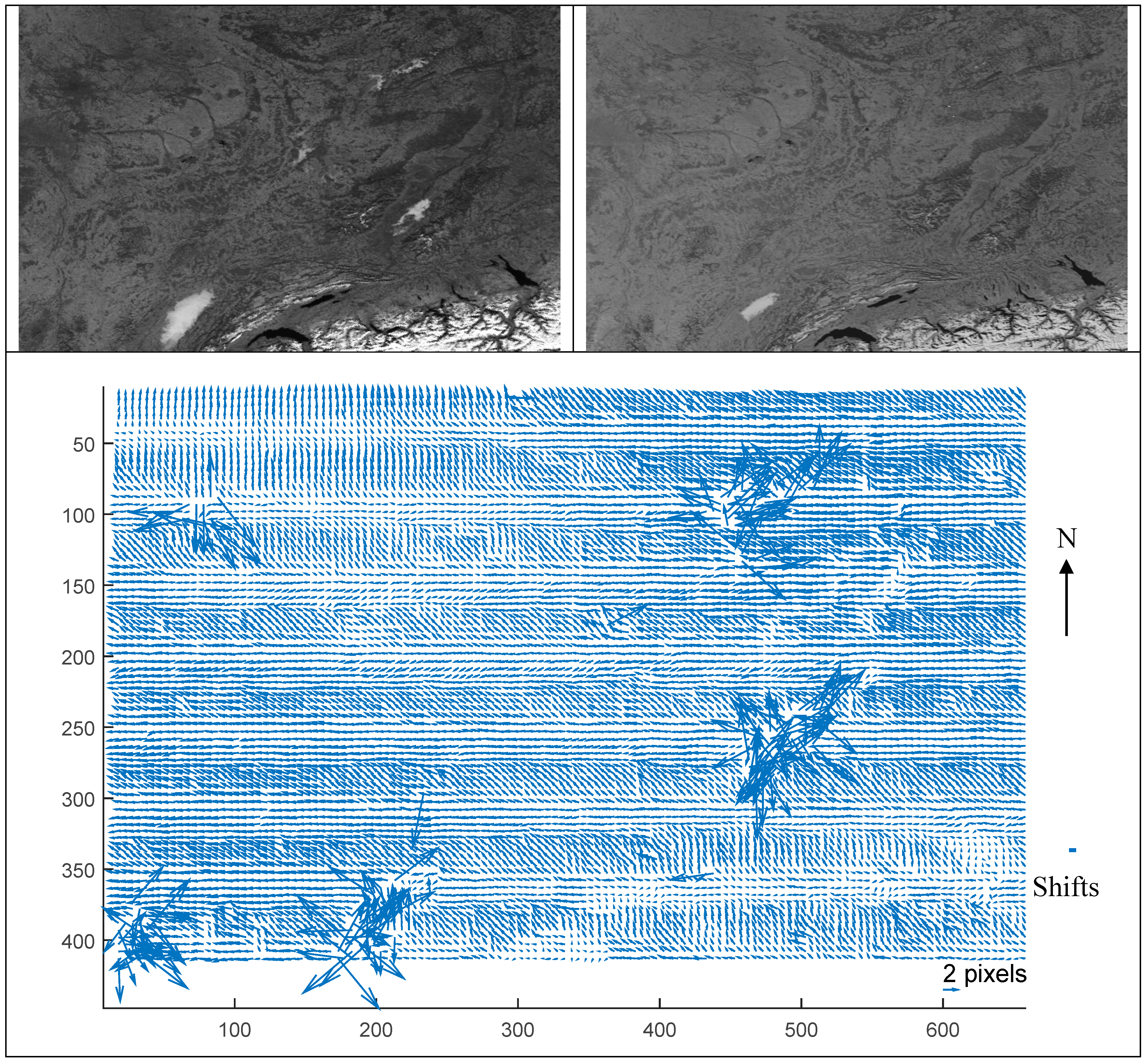
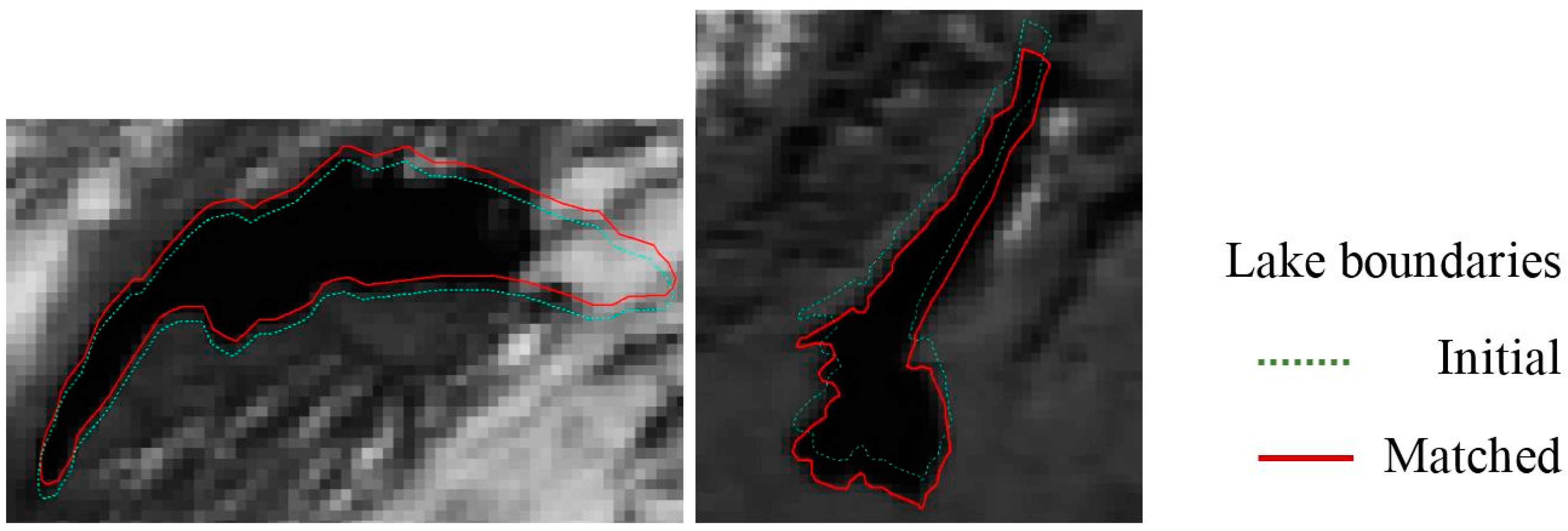
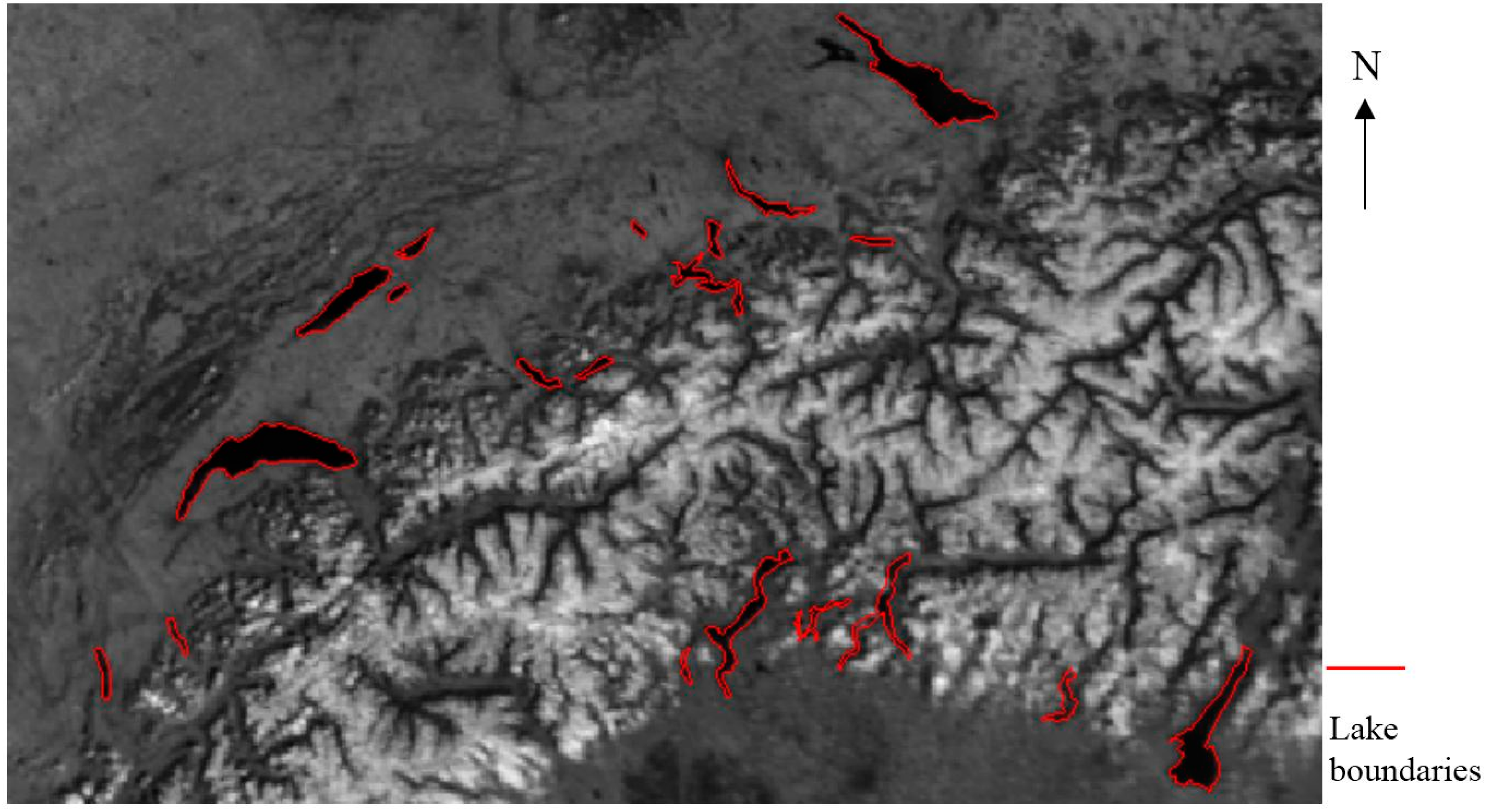
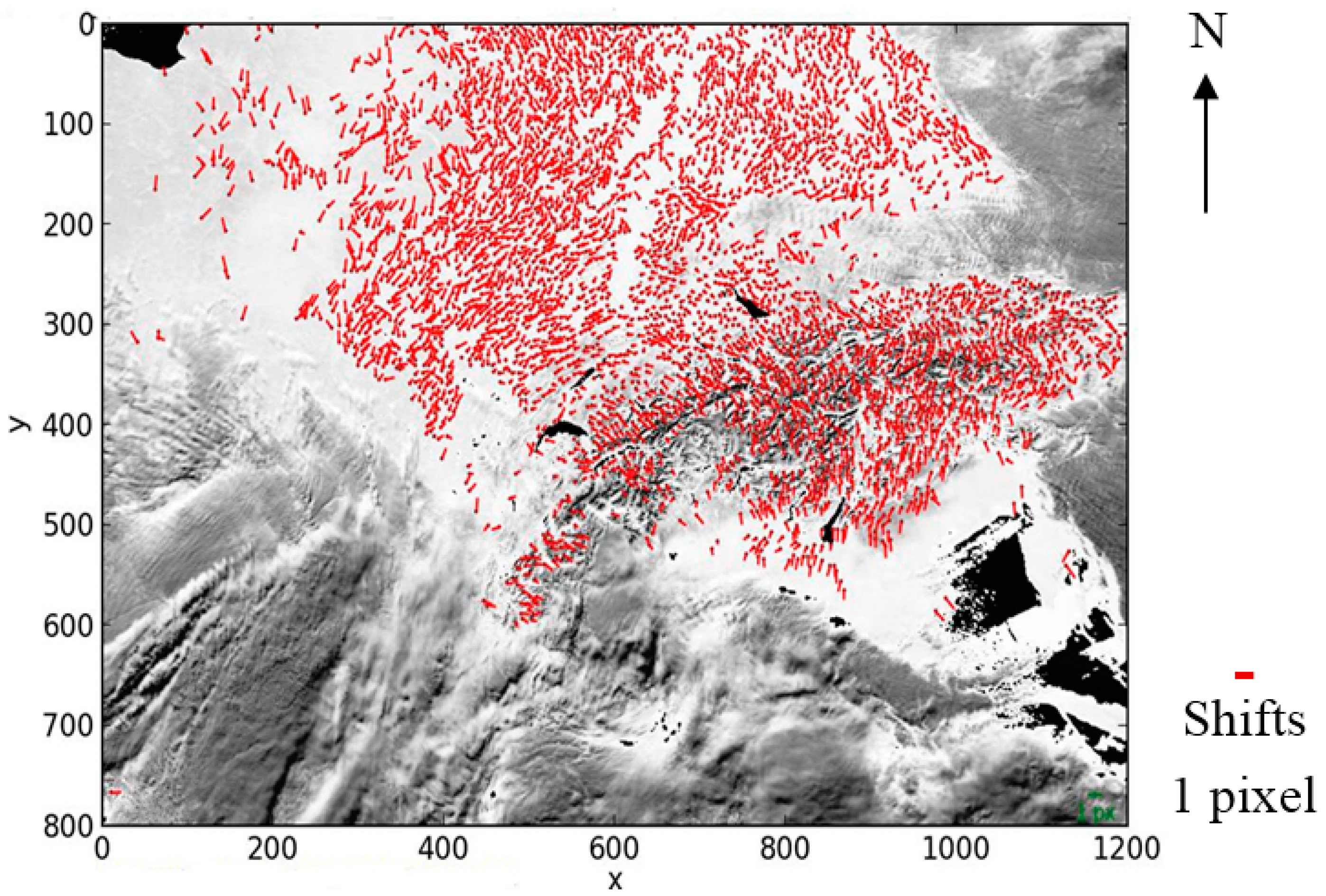
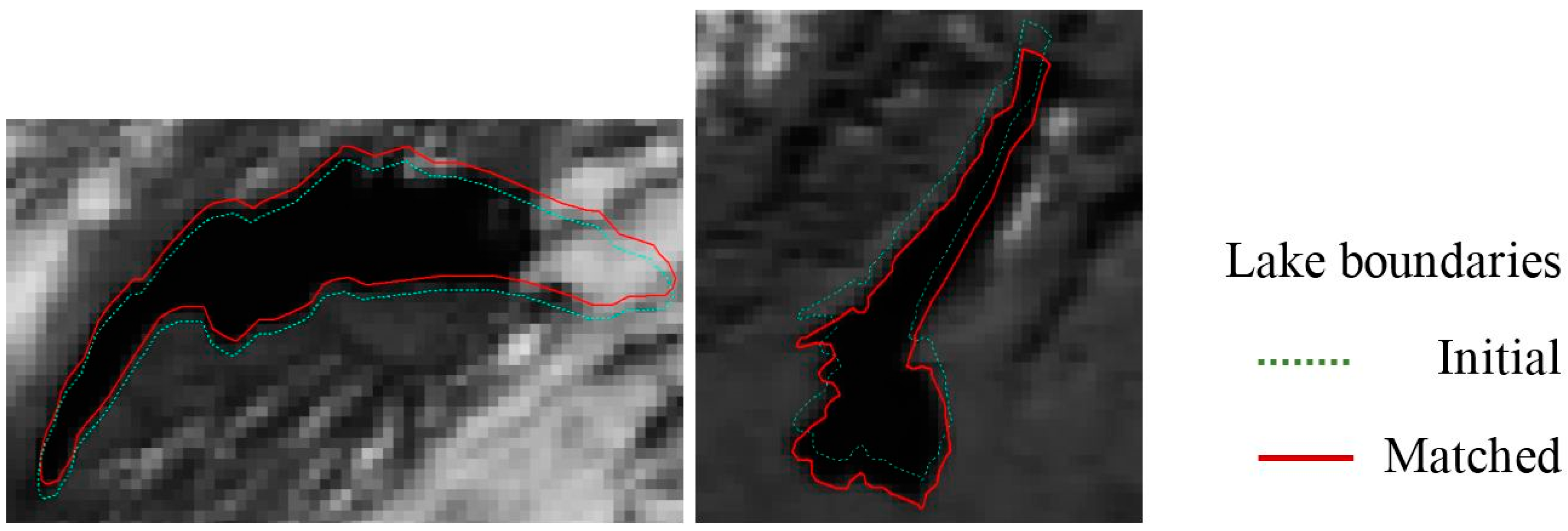
2.2. Absolute Accuracy
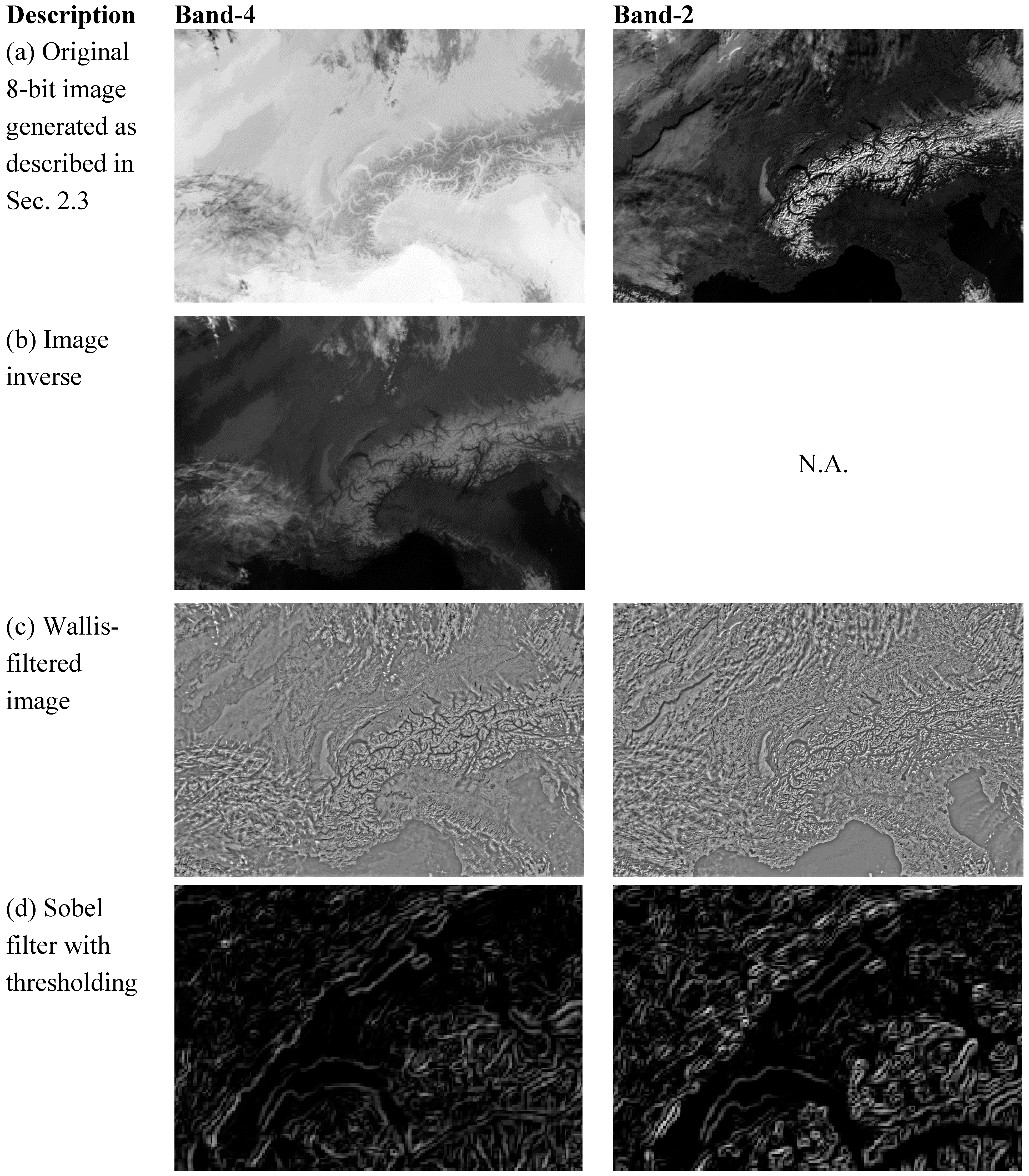
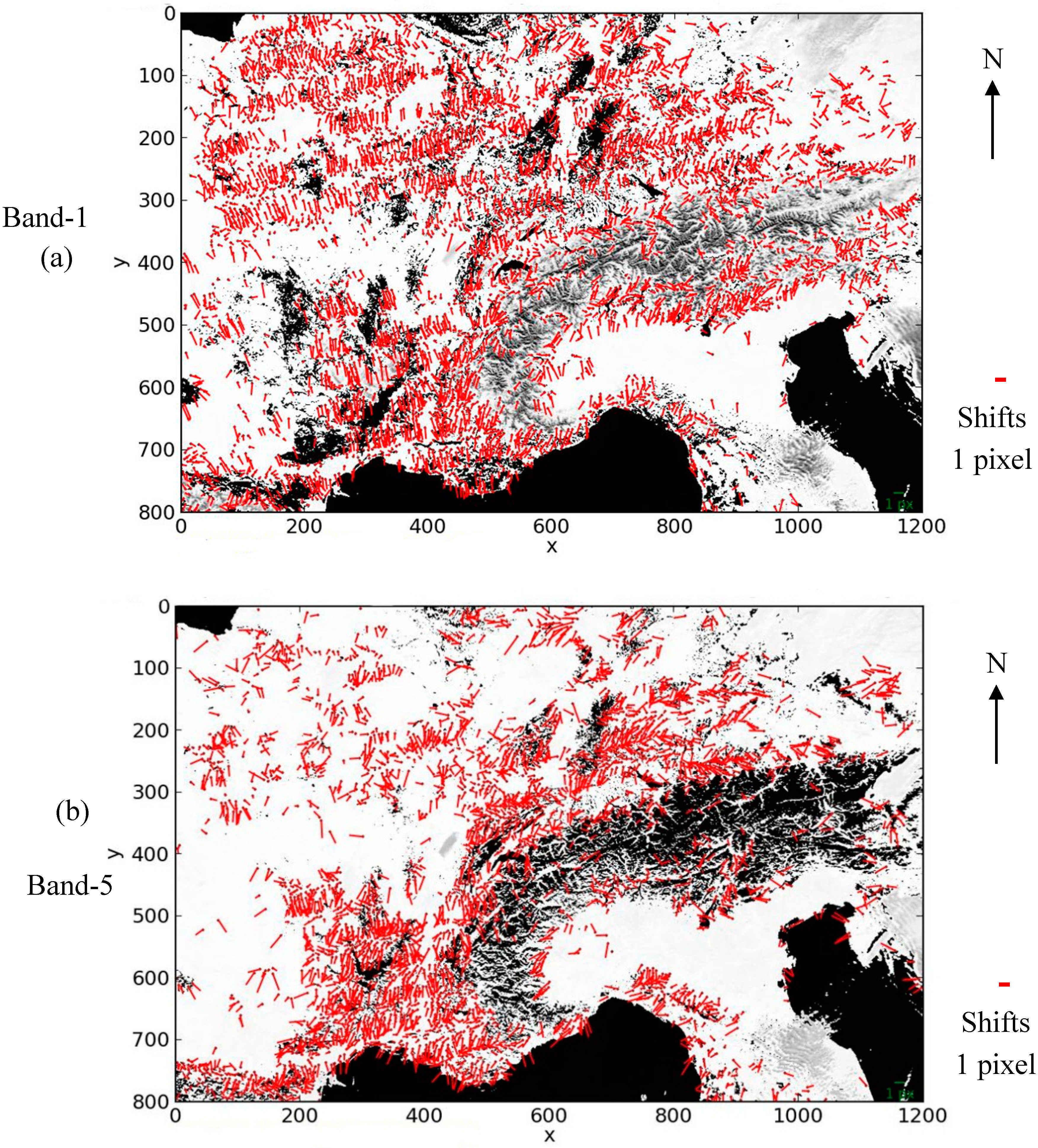
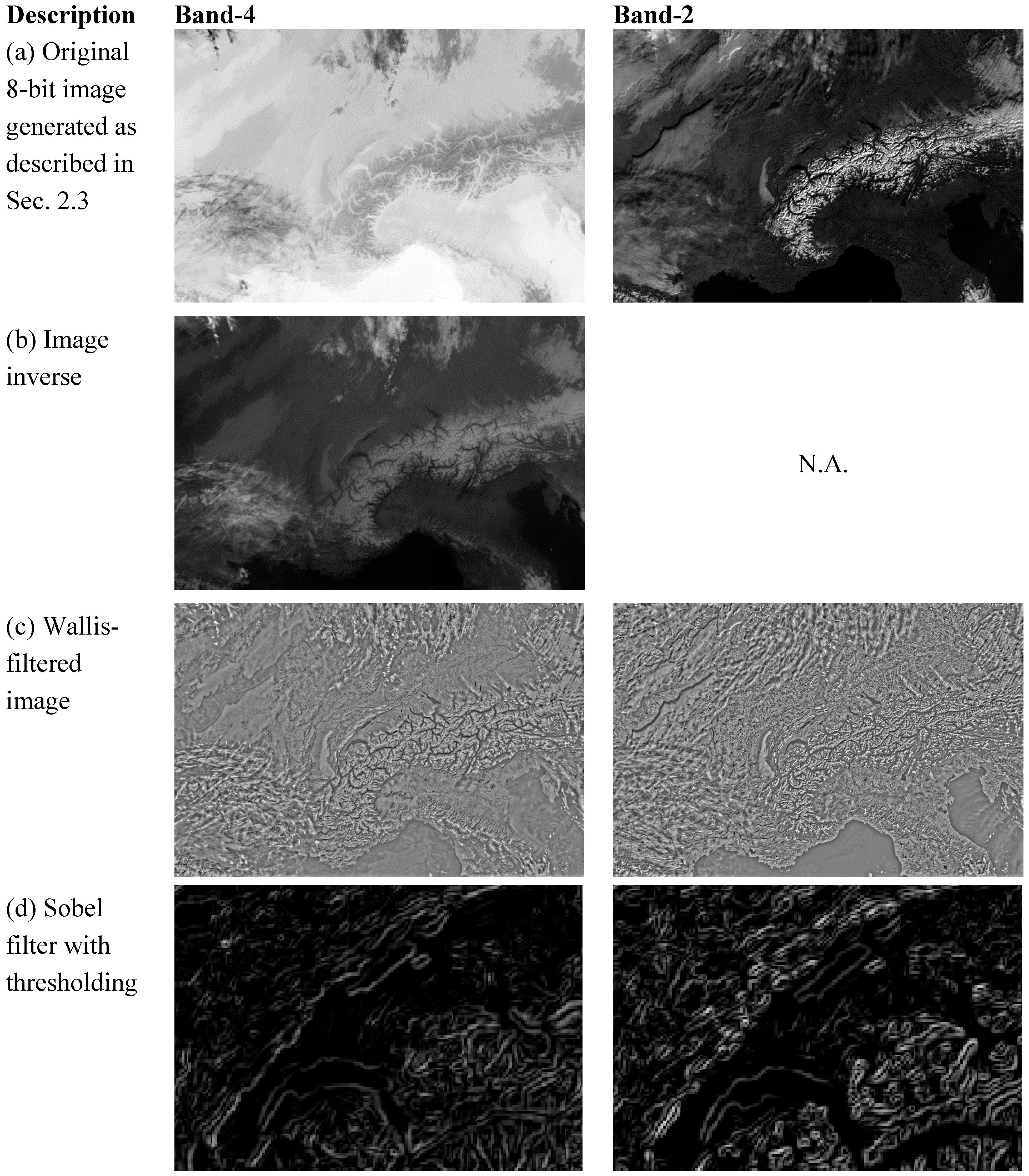
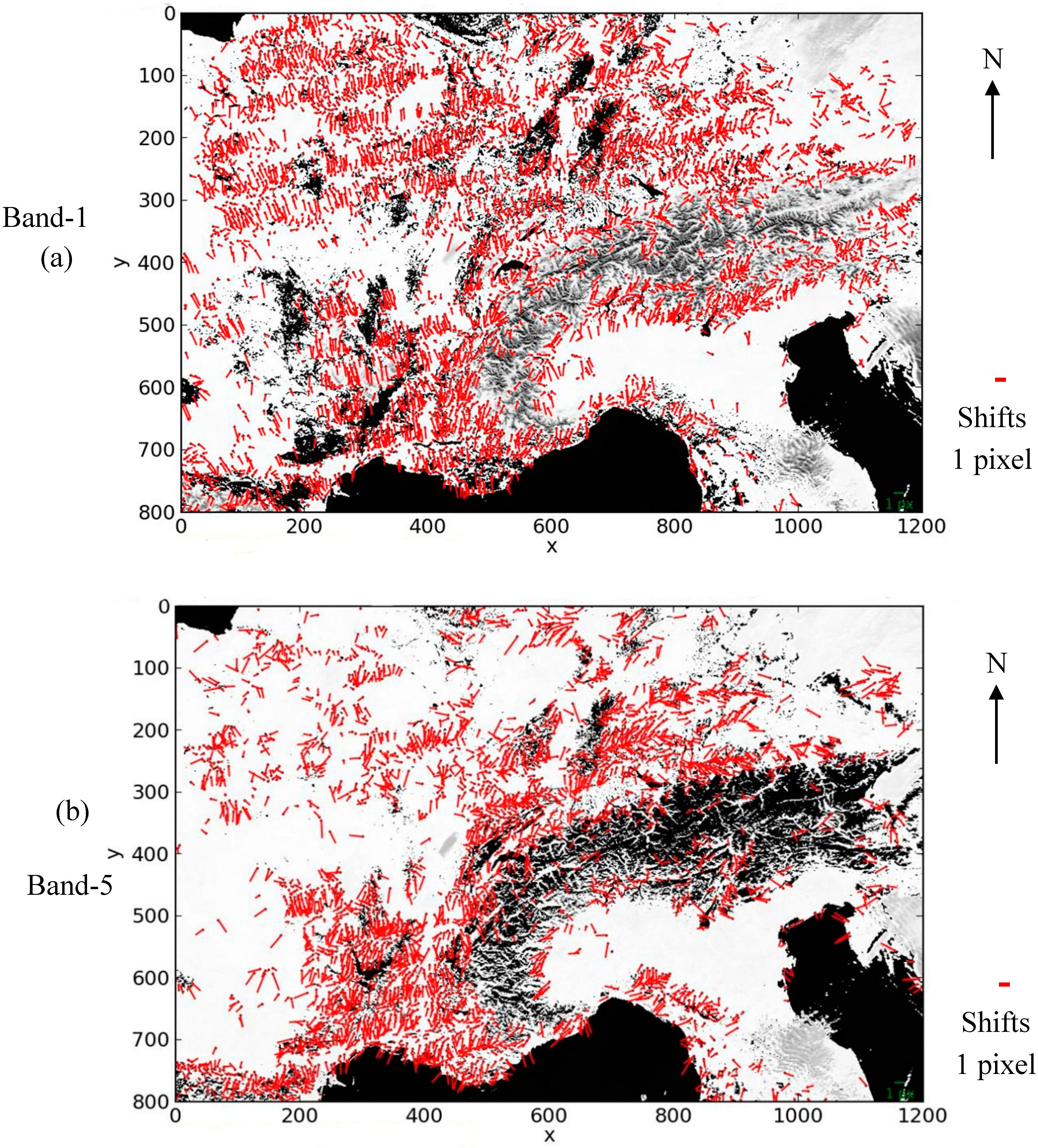
2.3. Band-to-Band Registration Accuracy
- Image inverse: Radiometric inverse has been applied to the Bands 3A, 3B, 4 and 5 since the appearance of the mountain areas are similar to those in Band-2 only after the inverse is taken. The functions in Python imaging library is used for this purpose [14].
- Wallis filtering: applied to the image inverses to increase the local contrast and the radiometric similarity of the images. The method has been described in [15] and the software implementation has been done by the Photogrammetry and Remote Sensing Group at ETH Zurich. The same filtering parameters are used for all images (i.e., block size (20 × 20), target mean (127), target standard deviation (50), brightness enforcing constant (1), contrast enforcing constant (0.95)).
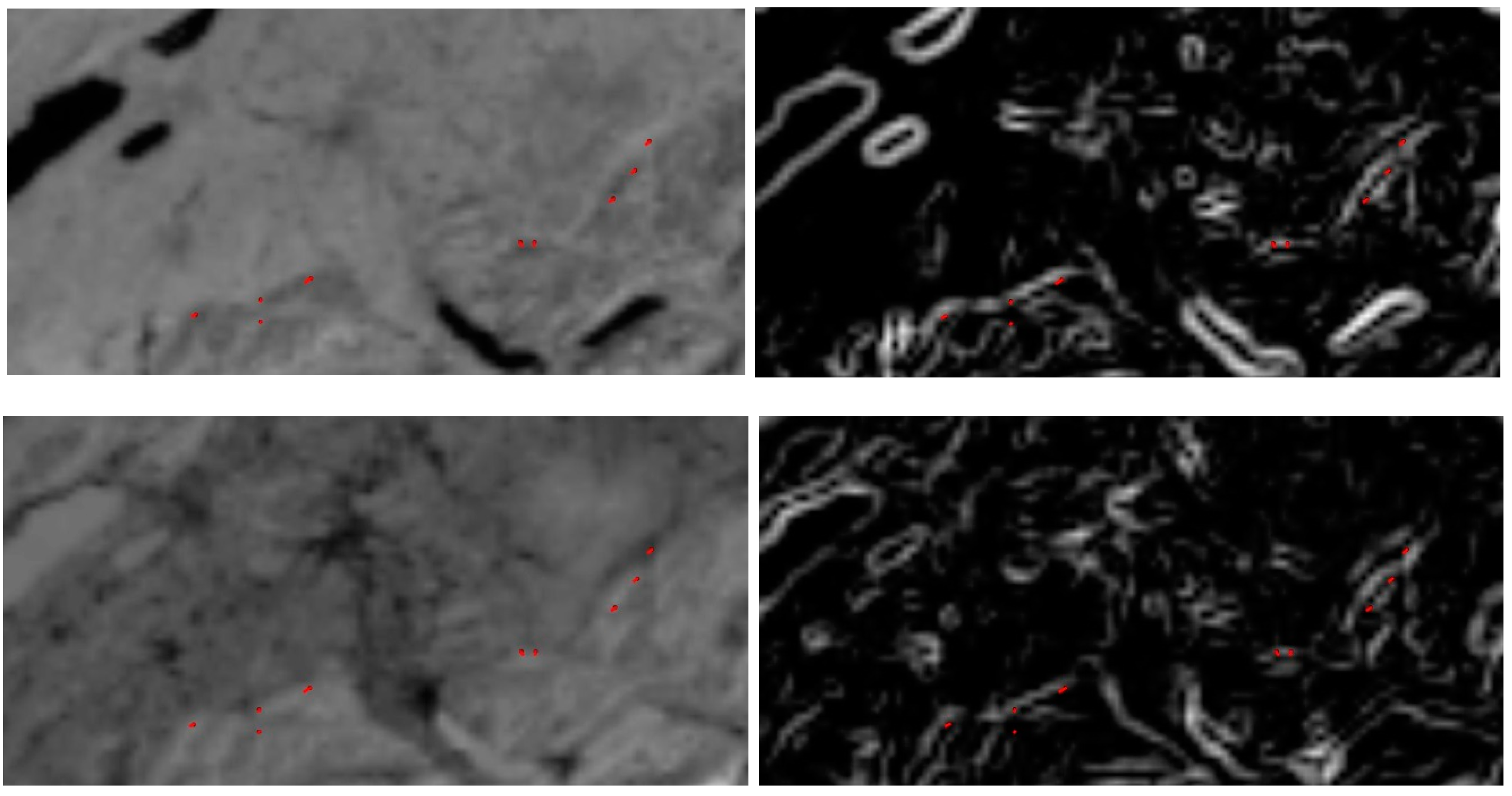
- Sobel filtering: applied to the Wallis-filtered images to detect edges in the images. The filter has been implemented here using Python programming language.
- Thresholding: reduces weak edges, often due to noise, from Sobel-filtered images. The threshold is selected as 50% of the cumulative histogram of edge gradients for all images.


3. Results and Discussion
3.1. Relative Accuracy Results
3.1.1. Results (Overall)
| Satellites | Parameter | P0 | P1 | Shift (x) | Shift (y) | σ (x) | σ (y) | MED (x) | MED (y) | MAD (x) | MAD (y) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Metop-A & NOAA-17 (25 pairs) | Min | 1490 | 1173 | 0.0 | 0.0 | 0.1 | 0.1 | 0.0 | 0.0 | 0.1 | 0.1 |
| Max | 5000 | 4455 | 1.8 | 2.9 | 1.0 | 1.2 | 1.7 | 2.9 | 0.6 | 0.9 | |
| Mean | 4623 | 3701 | 0.4 | 0.4 | 0.4 | 0.4 | 0.3 | 0.4 | 0.3 | 0.3 | |
| MED | 5000 | 3960 | 0.2 | 0.2 | 0.4 | 0.3 | 0.2 | 0.2 | 0.2 | 0.2 | |
| σ | 844 | 733 | 0.5 | 0.7 | 0.2 | 0.3 | 0.4 | 0.7 | 0.1 | 0.2 | |
| Metop-A & NOAA-18 (9 pairs) | Min | 2848 | 1979 | 0.0 | 0.0 | 0.3 | 0.5 | 0.1 | 0.1 | 0.2 | 0.4 |
| Max | 5000 | 4427 | 1.1 | 0.9 | 0.8 | 1.0 | 1.1 | 0.7 | 0.5 | 0.7 | |
| Mean | 4698 | 3632 | 0.2 | 0.3 | 0.5 | 0.6 | 0.2 | 0.2 | 0.3 | 0.5 | |
| MED | 5000 | 3814 | 0.1 | 0.2 | 0.4 | 0.5 | 0.1 | 0.2 | 0.3 | 0.4 | |
| σ | 718 | 834 | 0.3 | 0.2 | 0.2 | 0.2 | 0.3 | 0.2 | 0.1 | 0.1 | |
| NOAA-17 & NOAA-18 (15 pairs) | Min | 1535 | 372 | 0.0 | 0.0 | 0.3 | 0.5 | 0.0 | 0.0 | 0.2 | 0.3 |
| Max | 5000 | 4651 | 1.6 | 0.6 | 1.0 | 0.7 | 1.6 | 0.5 | 0.6 | 0.5 | |
| Mean | 4437 | 2938 | 0.3 | 0.2 | 0.5 | 0.5 | 0.3 | 0.2 | 0.3 | 0.4 | |
| MED | 5000 | 3093 | 0.1 | 0.2 | 0.5 | 0.5 | 0.2 | 0.2 | 0.3 | 0.4 | |
| σ | 1005 | 1097 | 0.4 | 0.1 | 0.2 | 0.1 | 0.4 | 0.1 | 0.1 | 0.0 | |
| NOAA-18 & NOAA-18 (2 pairs) | Min | 3989 | 2558 | 0.7 | 0.0 | 0.8 | 0.7 | 0.6 | 0.0 | 0.4 | 0.5 |
| Max | 5000 | 3179 | 1.1 | 0.1 | 1.4 | 0.9 | 1.1 | 0.1 | 0.7 | 0.6 | |
| Mean | 4495 | 2869 | 0.9 | 0.1 | 1.1 | 0.8 | 0.8 | 0.1 | 0.6 | 0.5 | |
| MED | 4495 | 2869 | 0.9 | 0.1 | 1.1 | 0.8 | 0.8 | 0.1 | 0.6 | 0.5 | |
| σ | 715 | 439 | 0.3 | 0.1 | 0.4 | 0.1 | 0.3 | 0.1 | 0.2 | 0.0 |
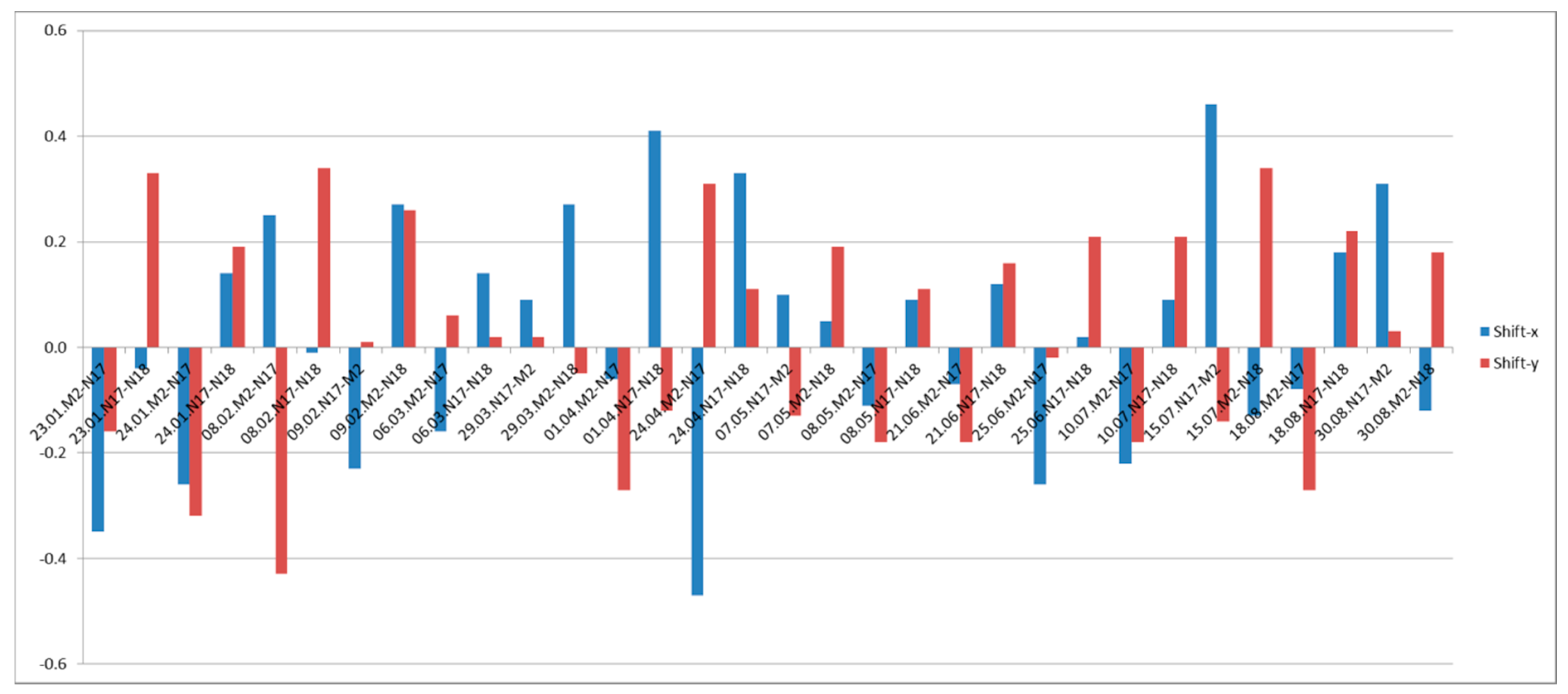
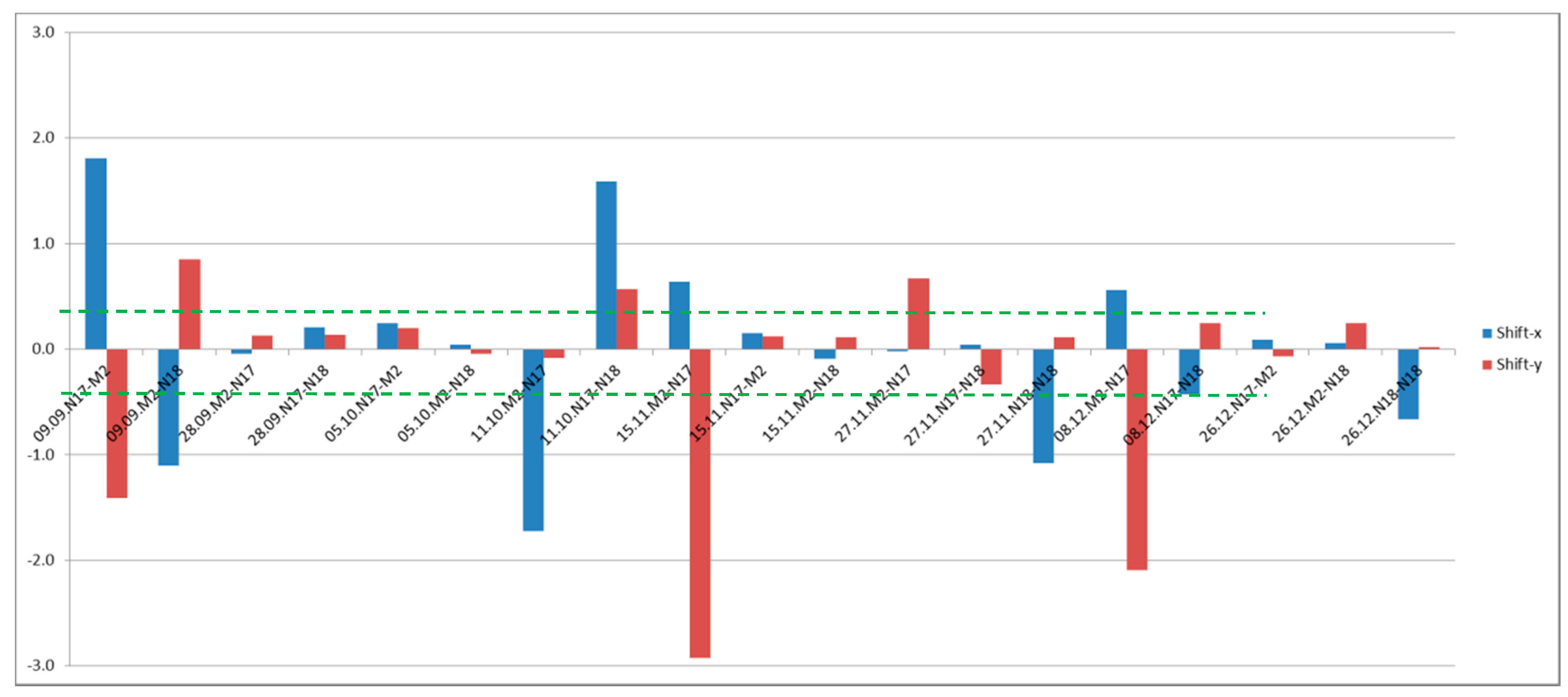
3.1.2. Systematic Errors


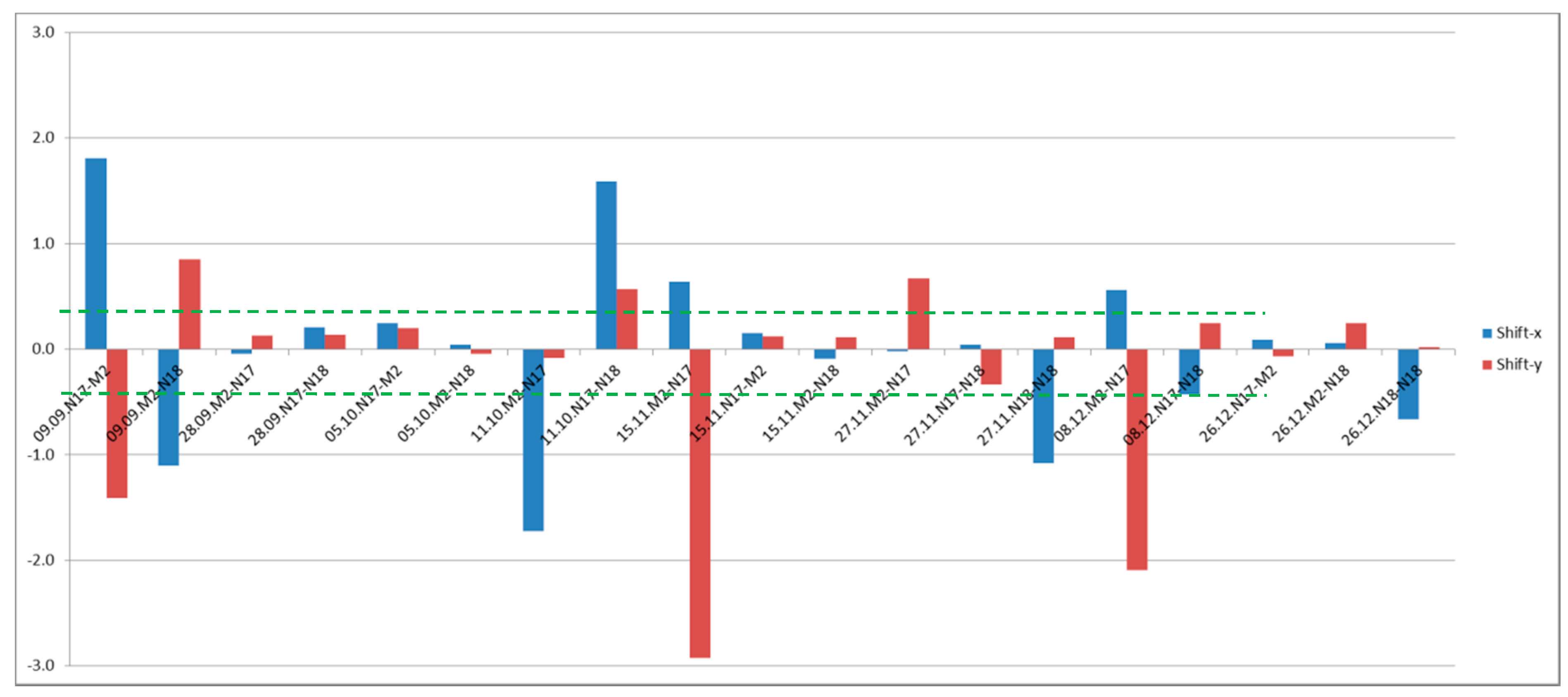
3.2. Absolute Accuracy Results
| Date | Shift (x) | Shift (y) | σ (x) | σ (y) | MED (x) | MED (y) | MAD (x) | MAD (y) | No. of Lakes |
|---|---|---|---|---|---|---|---|---|---|
| 23.01.2008 | −0.4 | −0.3 | 0.2 | 0.3 | −0.5 | −0.3 | 0.2 | 0.2 | 20 |
| 24.01.2008 | −0.1 | −0.8 | 0.3 | 0.3 | −0.2 | −0.8 | 0.2 | 0.2 | 20 |
| 08.02.2008 | −0.2 | −0.6 | 0.2 | 0.2 | −0.2 | −0.6 | 0.2 | 0.2 | 20 |
| 09.02.2008 | −0.4 | −1.5 | 0.3 | 0.3 | −0.4 | −1.6 | 0.3 | 0.2 | 20 |
| 09.02.2008 | 0.3 | −0.1 | 0.3 | 0.4 | 0.4 | −0.1 | 0.3 | 0.3 | 20 |
| 06.03.2008 | −0.1 | −0.2 | 0.2 | 0.3 | −0.1 | −0.2 | 0.2 | 0.2 | 20 |
| 29.03.2008 | 0.2 | −0.4 | 0.2 | 0.3 | 0.2 | −0.5 | 0.1 | 0.3 | 18 |
| 01.04.2008 | 0.0 | −0.4 | 0.1 | 0.1 | 0.0 | −0.4 | 0.1 | 0.1 | 7 |
| 07.05.2008 | 0.1 | 0.0 | 0.2 | 0.2 | 0.0 | 0.0 | 0.1 | 0.1 | 20 |
| 08.05.2008 | 0.0 | −0.3 | 0.1 | 0.1 | 0.0 | −0.3 | 0.1 | 0.1 | 19 |
| 21.06.2008 | 0.0 | −0.2 | 0.2 | 0.2 | 0.0 | −0.2 | 0.1 | 0.0 | 20 |
| 25.06.2008 | −0.1 | −0.1 | 0.1 | 0.1 | −0.1 | −0.1 | 0.1 | 0.1 | 19 |
| 10.07.2008 | 0.0 | −0.1 | 0.2 | 0.2 | 0.0 | −0.1 | 0.1 | 0.1 | 19 |
| 15.07.2008 | −0.2 | 0.4 | 0.1 | 0.3 | −0.2 | 0.4 | 0.1 | 0.2 | 20 |
| 18.08.2008 | 0.0 | −0.2 | 0.2 | 0.2 | 0.0 | −0.3 | 0.1 | 0.1 | 19 |
| 30.08.2008 | −0.1 | −0.1 | 0.4 | 0.3 | −0.1 | −0.1 | 0.2 | 0.2 | 16 |
| 09.09.2008 | −1.7 | 2.0 | 0.4 | 0.5 | −1.6 | 1.8 | 0.3 | 0.3 | 20 |
| 28.09.2008 | 0.1 | −0.1 | 0.4 | 0.4 | 0.2 | −0.1 | 0.2 | 0.3 | 14 |
| 05.10.2008 | 0.0 | −0.4 | 0.2 | 0.2 | 0.0 | −0.4 | 0.1 | 0.2 | 20 |
| 11.10.2008 | −0.3 | 0.0 | 0.2 | 0.3 | −0.3 | 0.0 | 0.1 | 0.2 | 11 |
| 15.11.2008 | 0.4 | −4.0 | 0.4 | 0.4 | 0.5 | −4.2 | 0.3 | 0.2 | 11 |
| 27.11.2008 | −0.4 | 0.1 | 0.2 | 0.4 | −0.4 | 0.1 | 0.2 | 0.3 | 14 |
| 08.12.2008 | 0.3 | −2.3 | 0.3 | 0.4 | 0.3 | −2.4 | 0.2 | 0.4 | 13 |
| 26.12.2008 | 0.0 | −0.4 | 0.3 | 0.3 | 0.0 | −0.5 | 0.2 | 0.3 | 18 |
| Min | −1.7 | −4.0 | 0.1 | 0.1 | −1.6 | −4.2 | 0.1 | 0.0 | 7 |
| Max | 0.4 | 2.0 | 0.4 | 0.5 | 0.5 | 1.8 | 0.3 | 0.4 | 20 |
| Mean | −0.1 | −0.4 | 0.2 | 0.3 | −0.1 | −0.5 | 0.2 | 0.2 | 17.4 |
| MED | 0.0 | −0.2 | 0.2 | 0.3 | 0.0 | −0.3 | 0.2 | 0.2 | 19.0 |
| σ | 0.4 | 1.1 | 0.1 | 0.1 | 0.4 | 1.1 | 0.1 | 0.1 | 3.7 |
| Date | Shift (x) | Shift (y) | σ (x) | σ (y) | MED (x) | MED (y) | MAD (x) | MAD (y) | No. of Lakes |
|---|---|---|---|---|---|---|---|---|---|
| 23.01.2008 | 0.0 | −0.2 | 0.2 | 0.3 | 0.0 | −0.2 | 0.2 | 0.3 | 20 |
| 24.01.2008 | 0.2 | −0.4 | 0.2 | 0.2 | 0.2 | −0.5 | 0.1 | 0.3 | 20 |
| 08.02.2008 | −0.3 | 0.0 | 0.2 | 0.3 | −0.3 | −0.1 | 0.1 | 0.3 | 20 |
| 09.02.2008 | 0.0 | −0.3 | 0.2 | 0.2 | 0.0 | −0.3 | 0.1 | 0.2 | 20 |
| 06.03.2008 | 0.1 | −0.2 | 0.2 | 0.2 | 0.1 | −0.2 | 0.1 | 0.2 | 19 |
| 29.03.2008 | 0.4 | −0.1 | 0.2 | 0.2 | 0.3 | −0.2 | 0.1 | 0.1 | 18 |
| 01.04.2008 | 0.0 | −0.2 | 0.1 | 0.2 | 0.0 | −0.3 | 0.1 | 0.1 | 9 |
| 07.05.2008 | 0.2 | −0.1 | 0.2 | 0.3 | 0.2 | −0.2 | 0.1 | 0.1 | 20 |
| 08.05.2008 | −0.1 | −0.2 | 0.4 | 0.4 | −0.3 | −0.3 | 0.3 | 0.2 | 19 |
| 08.05.2008 | 0.1 | −0.2 | 0.4 | 0.4 | 0.1 | −0.1 | 0.2 | 0.3 | 19 |
| 21.06.2008 | 0.2 | 0.1 | 0.3 | 0.2 | 0.2 | 0.0 | 0.2 | 0.1 | 17 |
| 25.06.2008 | 0.2 | 0.0 | 0.2 | 0.1 | 0.3 | 0.0 | 0.1 | 0.0 | 19 |
| 10.07.2008 | 0.1 | 0.0 | 0.2 | 0.2 | 0.1 | 0.0 | 0.1 | 0.2 | 20 |
| 15.07.2008 | 0.2 | 0.0 | 0.2 | 0.2 | 0.3 | 0.1 | 0.1 | 0.1 | 20 |
| 18.08.2008 | 0.0 | −0.1 | 0.2 | 0.1 | 0.1 | 0.0 | 0.1 | 0.1 | 20 |
| 30.08.2008 | 0.1 | −0.1 | 0.2 | 0.1 | 0.0 | 0.0 | 0.1 | 0.1 | 17 |
| 09.09.2008 | 0.0 | −0.2 | 0.1 | 0.2 | 0.0 | −0.2 | 0.1 | 0.1 | 20 |
| 28.09.2008 | 0.3 | −0.2 | 0.5 | 0.3 | 0.4 | −0.1 | 0.2 | 0.2 | 15 |
| 05.10.2008 | 0.3 | −0.2 | 0.2 | 0.2 | 0.2 | −0.2 | 0.1 | 0.2 | 19 |
| 11.10.2008 | 1.6 | 0.3 | 0.4 | 0.3 | 1.6 | 0.3 | 0.3 | 0.2 | 12 |
| 15.11.2008 | 0.2 | −0.6 | 0.3 | 0.4 | 0.2 | −0.6 | 0.2 | 0.3 | 13 |
| 27.11.2008 | −0.2 | −0.6 | 0.3 | 0.3 | −0.2 | −0.6 | 0.2 | 0.4 | 12 |
| 08.12.2008 | 0.0 | −0.3 | 0.3 | 0.3 | −0.1 | −0.3 | 0.1 | 0.3 | 13 |
| 26.12.2008 | 0.1 | −0.4 | 0.3 | 0.3 | 0.1 | −0.4 | 0.1 | 0.3 | 18 |
| Min | −0.3 | −0.6 | 0.1 | 0.1 | −0.3 | −0.6 | 0.1 | 0.0 | 9 |
| Max | 1.6 | 0.3 | 0.5 | 0.4 | 1.6 | 0.3 | 0.3 | 0.4 | 20 |
| Mean | 0.2 | −0.2 | 0.3 | 0.2 | 0.1 | −0.2 | 0.1 | 0.2 | 17.5 |
| MED | 0.1 | −0.2 | 0.2 | 0.2 | 0.1 | −0.2 | 0.1 | 0.2 | 19.0 |
| σ | 0.3 | 0.2 | 0.1 | 0.1 | 0.4 | 0.2 | 0.1 | 0.1 | 3.3 |
| Date | Shift (x) | Shift (y) | σ (x) | σ (y) | MED (x) | MED (y) | MAD (x) | MAD (y) | No. of Lakes |
|---|---|---|---|---|---|---|---|---|---|
| 23.01.2008 | 0.1 | −0.6 | 0.2 | 0.5 | 0.2 | −0.6 | 0.2 | 0.5 | 17 |
| 24.01.2008 | 0.2 | −0.5 | 0.3 | 0.5 | 0.3 | −0.8 | 0.2 | 0.1 | 16 |
| 08.02.2008 | −0.2 | −0.5 | 0.2 | 0.3 | −0.2 | −0.5 | 0.2 | 0.2 | 20 |
| 09.02.2008 | 0.0 | −0.6 | 0.2 | 0.3 | 0.1 | −0.6 | 0.1 | 0.3 | 20 |
| 06.03.2008 | 0.1 | −0.2 | 0.2 | 0.4 | 0.1 | −0.1 | 0.2 | 0.2 | 18 |
| 29.03.2008 | 0.1 | −0.4 | 0.2 | 0.3 | 0.1 | −0.4 | 0.1 | 0.2 | 20 |
| 01.04.2008 | −0.1 | 0.1 | 0.4 | 0.3 | 0.0 | 0.1 | 0.2 | 0.3 | 9 |
| 07.05.2008 | 0.0 | −0.1 | 0.2 | 0.3 | 0.0 | −0.1 | 0.2 | 0.2 | 17 |
| 08.05.2008 | 0.1 | −0.2 | 0.3 | 0.2 | 0.2 | −0.2 | 0.1 | 0.1 | 19 |
| 21.06.2008 | 0.2 | −0.1 | 0.2 | 0.3 | 0.2 | −0.1 | 0.1 | 0.2 | 18 |
| 25.06.2008 | 0.2 | −0.2 | 0.2 | 0.3 | 0.3 | −0.3 | 0.2 | 0.3 | 12 |
| 10.07.2008 | 0.2 | −0.1 | 0.2 | 0.3 | 0.3 | 0.0 | 0.1 | 0.2 | 20 |
| 15.07.2008 | 0.0 | −0.4 | 0.3 | 0.5 | −0.1 | −0.7 | 0.2 | 0.2 | 20 |
| 18.08.2008 | 0.1 | −0.1 | 0.2 | 0.4 | 0.1 | −0.1 | 0.1 | 0.4 | 19 |
| 30.08.2008 | 0.2 | −0.2 | 0.2 | 0.4 | 0.2 | −0.2 | 0.1 | 0.3 | 19 |
| 09.09.2008 | 0.2 | −0.2 | 0.2 | 0.3 | 0.2 | −0.1 | 0.1 | 0.2 | 17 |
| 28.09.2008 | 0.1 | −0.2 | 0.1 | 0.3 | 0.1 | −0.2 | 0.1 | 0.2 | 17 |
| 05.10.2008 | 0.3 | −0.2 | 0.2 | 0.3 | 0.3 | −0.3 | 0.1 | 0.2 | 8 |
| 11.10.2008 | 0.3 | −0.6 | 0.3 | 0.4 | 0.4 | −0.6 | 0.2 | 0.1 | 12 |
| 15.11.2008 | 0.0 | −1.0 | 0.3 | 0.4 | 0.0 | −1.1 | 0.2 | 0.3 | 14 |
| 27.11.2008 | 0.0 | −0.3 | 0.4 | 0.3 | 0.0 | −0.3 | 0.2 | 0.3 | 17 |
| 08.12.2008 | 0.1 | −0.4 | 0.2 | 0.5 | 0.0 | −0.5 | 0.1 | 0.3 | 13 |
| 08.12.2008 | 0.7 | −0.7 | 0.3 | 0.3 | 0.6 | −0.7 | 0.2 | 0.3 | 16 |
| 26.12.2008 | 0.0 | −0.5 | 0.4 | 0.5 | −0.1 | −0.7 | 0.3 | 0.1 | 20 |
| Min | −0.2 | −1.0 | 0.1 | 0.2 | −0.2 | −1.1 | 0.1 | 0.1 | 8 |
| Max | 0.7 | 0.1 | 0.4 | 0.5 | 0.6 | 0.1 | 0.3 | 0.5 | 20 |
| Mean | 0.1 | −0.3 | 0.2 | 0.4 | 0.1 | −0.4 | 0.1 | 0.2 | 16.6 |
| MED | 0.1 | −0.3 | 0.2 | 0.3 | 0.1 | −0.3 | 0.2 | 0.2 | 17.0 |
| σ | 0.2 | 0.2 | 0.1 | 0.1 | 0.2 | 0.3 | 0.1 | 0.1 | 3.5 |
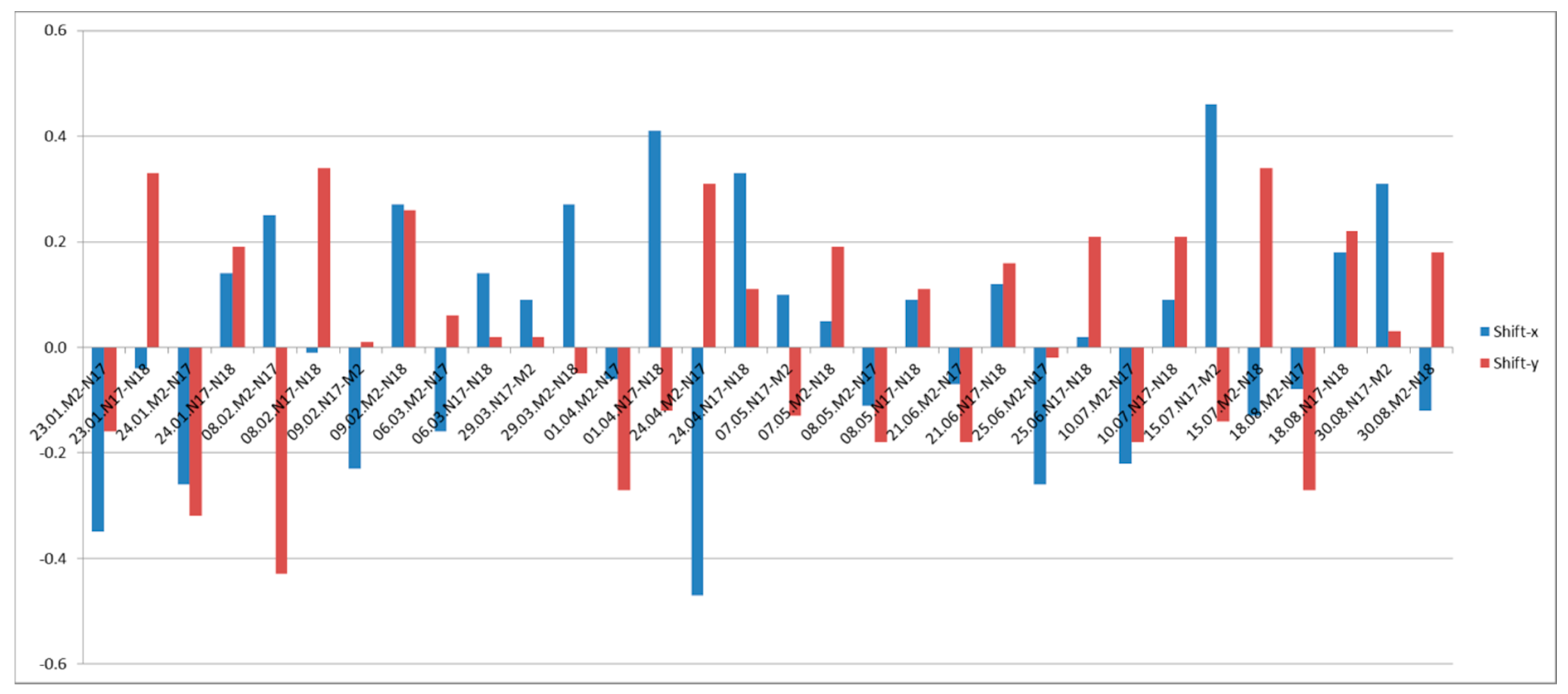
3.3. BBR Accuracy Results
| Satellite | Parameter | P0 | P1 | Shift (x) | Shift (y) | σ (x) | σ (y) | MED (x) | MED (y) | MAD (x) | MAD (y) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Metop-A (21 image pairs) | Min | 5763 | 38 | 0.03 | 0.00 | 0.04 | 0.04 | 0.03 | 0.00 | 0.03 | 0.03 |
| Max | 10,000 | 1419 | 0.12 | 0.08 | 0.22 | 0.23 | 0.12 | 0.10 | 0.17 | 0.18 | |
| Mean | 8503 | 321 | 0.07 | 0.03 | 0.12 | 0.11 | 0.07 | 0.04 | 0.09 | 0.08 | |
| MED | 9223 | 209 | 0.07 | 0.03 | 0.11 | 0.10 | 0.07 | 0.03 | 0.09 | 0.07 | |
| σ | 1650 | 363 | 0.02 | 0.02 | 0.06 | 0.05 | 0.03 | 0.03 | 0.05 | 0.04 | |
| NOAA-17 (22 image pairs) | Min | 4267 | 25 | 0.00 | 0.00 | 0.04 | 0.04 | 0.00 | 0.00 | 0.03 | 0.03 |
| Max | 10,000 | 1323 | 0.11 | 0.12 | 0.26 | 0.24 | 0.12 | 0.11 | 0.20 | 0.19 | |
| Mean | 8080 | 383 | 0.04 | 0.03 | 0.12 | 0.11 | 0.04 | 0.04 | 0.10 | 0.09 | |
| MED | 8881 | 184 | 0.03 | 0.03 | 0.12 | 0.10 | 0.03 | 0.03 | 0.08 | 0.08 | |
| σ | 2076 | 435 | 0.03 | 0.03 | 0.07 | 0.06 | 0.04 | 0.03 | 0.06 | 0.05 | |
| NOAA-18 (20 image pairs) | Min | 3594 | 21 | 0.00 | 0.00 | 0.06 | 0.05 | 0.00 | 0.00 | 0.00 | 0.03 |
| Max | 10,000 | 1436 | 0.15 | 0.21 | 0.27 | 0.22 | 0.15 | 0.21 | 0.18 | 0.21 | |
| Mean | 7421 | 364 | 0.08 | 0.09 | 0.14 | 0.13 | 0.08 | 0.09 | 0.08 | 0.10 | |
| MED | 7416 | 152 | 0.08 | 0.06 | 0.13 | 0.13 | 0.08 | 0.06 | 0.09 | 0.07 | |
| σ | 2326 | 457 | 0.05 | 0.06 | 0.07 | 0.05 | 0.05 | 0.06 | 0.05 | 0.06 |
| Satellite | Parameter | P0 | P1 | Shift (x) | Shift (y) | σ (x) | σ (y) | MED (x) | MED (y) | MAD (x) | MAD (y) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Metop-A (21 image pairs) | Min | 5763 | 45 | 0.11 | 0.00 | 0.06 | 0.04 | 0.11 | 0.00 | 0.05 | 0.03 |
| Max | 10,000 | 1692 | 0.28 | 0.14 | 0.17 | 0.21 | 0.28 | 0.14 | 0.13 | 0.14 | |
| Mean | 8503 | 781 | 0.17 | 0.05 | 0.11 | 0.13 | 0.17 | 0.05 | 0.09 | 0.10 | |
| MED | 9223 | 727 | 0.17 | 0.05 | 0.11 | 0.13 | 0.17 | 0.05 | 0.08 | 0.10 | |
| σ | 1650 | 510 | 0.04 | 0.04 | 0.02 | 0.03 | 0.04 | 0.04 | 0.02 | 0.02 | |
| NOAA-17 (22 image pairs) | Min | 4267 | 34 | 0.01 | 0.01 | 0.05 | 0.10 | 0.03 | 0.01 | 0.04 | 0.07 |
| Max | 10,000 | 1854 | 0.35 | 0.10 | 0.20 | 0.17 | 0.35 | 0.10 | 0.17 | 0.14 | |
| Mean | 8080 | 891 | 0.16 | 0.04 | 0.12 | 0.13 | 0.16 | 0.05 | 0.10 | 0.10 | |
| MED | 8881 | 980 | 0.15 | 0.04 | 0.12 | 0.13 | 0.15 | 0.05 | 0.09 | 0.10 | |
| σ | 2076 | 562 | 0.08 | 0.03 | 0.03 | 0.02 | 0.07 | 0.03 | 0.03 | 0.02 |
| Satellite | Parameter | P0 | P1 | Shift (x) | Shift (y) | σ (x) | σ (y) | MED (x) | MED (y) | MAD (x) | MAD (y) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| NOAA-18 (15 image pairs) | Min | 4301 | 12 | 0.00 | 0.01 | 0.11 | 0.08 | 0.01 | 0.01 | 0.09 | 0.06 |
| Max | 10000 | 153 | 0.42 | 0.24 | 0.42 | 0.19 | 0.42 | 0.25 | 0.35 | 0.17 | |
| Mean | 7945 | 59 | 0.16 | 0.13 | 0.24 | 0.15 | 0.18 | 0.14 | 0.19 | 0.11 | |
| MED | 8712 | 47 | 0.16 | 0.14 | 0.25 | 0.15 | 0.18 | 0.16 | 0.18 | 0.12 | |
| σ | 2131 | 45 | 0.13 | 0.07 | 0.09 | 0.04 | 0.12 | 0.07 | 0.08 | 0.03 |
| Satellite | Parameter | P0 | P1 | Shift (x) | Shift (y) | σ (x) | σ (y) | MED (x) | MED (y) | MAD (x) | MAD (y) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Metop-A (20 image pairs) | Min | 5763 | 11 | 0.18 | 0.00 | 0.07 | 0.10 | 0.18 | 0.00 | 0.04 | 0.08 |
| Max | 10,000 | 183 | 0.41 | 0.20 | 0.30 | 0.24 | 0.40 | 0.21 | 0.29 | 0.19 | |
| Mean | 8499 | 60 | 0.30 | 0.07 | 0.15 | 0.15 | 0.30 | 0.08 | 0.12 | 0.12 | |
| MED | 9330 | 50 | 0.31 | 0.05 | 0.14 | 0.16 | 0.31 | 0.08 | 0.11 | 0.12 | |
| σ | 1692 | 42 | 0.05 | 0.06 | 0.06 | 0.04 | 0.05 | 0.06 | 0.06 | 0.03 | |
| NOAA-17 (21 image pairs) | Min | 4267 | 10 | 0.02 | 0.02 | 0.08 | 0.09 | 0.10 | 0.00 | 0.06 | 0.06 |
| Max | 10,000 | 252 | 0.40 | 0.21 | 0.45 | 0.34 | 0.42 | 0.21 | 0.27 | 0.35 | |
| Mean | 8097 | 80 | 0.26 | 0.09 | 0.16 | 0.17 | 0.28 | 0.10 | 0.12 | 0.13 | |
| MED | 8948 | 68 | 0.26 | 0.09 | 0.14 | 0.16 | 0.28 | 0.11 | 0.10 | 0.11 | |
| σ | 2126 | 66 | 0.08 | 0.06 | 0.09 | 0.06 | 0.06 | 0.06 | 0.05 | 0.07 | |
| NOAA-18 (22 image pairs) | Min | 3339 | 10 | 0.02 | 0.00 | 0.12 | 0.06 | 0.01 | 0.00 | 0.05 | 0.05 |
| Max | 10,000 | 235 | 0.31 | 0.27 | 0.41 | 0.33 | 0.34 | 0.26 | 0.29 | 0.27 | |
| Mean | 7052 | 89 | 0.17 | 0.11 | 0.20 | 0.16 | 0.18 | 0.12 | 0.15 | 0.13 | |
| MED | 6532 | 88 | 0.17 | 0.09 | 0.19 | 0.16 | 0.17 | 0.11 | 0.15 | 0.13 | |
| σ | 2515 | 70 | 0.07 | 0.07 | 0.07 | 0.06 | 0.08 | 0.07 | 0.05 | 0.05 |
| Satellite | Parameter | P0 | P1 | Shift (x) | Shift (y) | σ (x) | σ (y) | MED (x) | MED (y) | MAD (x) | MAD (y) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Metop-A (20 image pairs) | Min | 5763 | 13 | 0.13 | 0.01 | 0.04 | 0.12 | 0.10 | 0.01 | 0.04 | 0.08 |
| Max | 10,000 | 144 | 0.46 | 0.24 | 0.32 | 0.22 | 0.44 | 0.25 | 0.30 | 0.16 | |
| Mean | 8499 | 54 | 0.29 | 0.09 | 0.15 | 0.16 | 0.30 | 0.10 | 0.12 | 0.12 | |
| MED | 9330 | 42 | 0.30 | 0.08 | 0.15 | 0.16 | 0.31 | 0.09 | 0.11 | 0.13 | |
| σ | 1692 | 35 | 0.08 | 0.07 | 0.06 | 0.03 | 0.08 | 0.07 | 0.05 | 0.02 | |
| NOAA-17 (19 image pairs) | Min | 4267 | 13 | 0.12 | 0.00 | 0.07 | 0.06 | 0.12 | 0.01 | 0.05 | 0.05 |
| Max | 10,000 | 217 | 0.39 | 0.26 | 0.25 | 0.26 | 0.40 | 0.25 | 0.16 | 0.20 | |
| Mean | 8400 | 86 | 0.27 | 0.09 | 0.15 | 0.15 | 0.26 | 0.11 | 0.11 | 0.12 | |
| MED | 9211 | 76 | 0.26 | 0.09 | 0.14 | 0.16 | 0.26 | 0.10 | 0.10 | 0.13 | |
| σ | 1992 | 58 | 0.06 | 0.07 | 0.05 | 0.05 | 0.06 | 0.07 | 0.03 | 0.04 | |
| NOAA-18 (20 image pairs) | Min | 3370 | 10 | 0.03 | 0.01 | 0.12 | 0.05 | 0.04 | 0.00 | 0.09 | 0.04 |
| Max | 10,000 | 200 | 0.27 | 0.29 | 0.30 | 0.21 | 0.29 | 0.31 | 0.25 | 0.17 | |
| Mean | 7410 | 94 | 0.13 | 0.13 | 0.20 | 0.15 | 0.13 | 0.14 | 0.15 | 0.12 | |
| MED | 7416 | 96 | 0.13 | 0.12 | 0.20 | 0.15 | 0.13 | 0.13 | 0.15 | 0.12 | |
| σ | 2346 | 69 | 0.06 | 0.07 | 0.05 | 0.03 | 0.07 | 0.08 | 0.04 | 0.04 |
4. Conclusions
| Accuracy Type | Specification EUMETSAT/GCOS | Achieved | Achieved | Achieved |
|---|---|---|---|---|
| Metop-A (km) | NOAA-17 (km) | NOAA-18 (km) | ||
| Absolute accuracy | < 1.0 km / < 1/3 pixel | Max(x): 1.7 | Max(x): 1.6 | Max(x): 0.7 |
| Max(y): 4.0 | Max(y): 0.6 | Max(y): 1.0 | ||
| Mean(x): 0.1 | Mean(x): 0.2 | Mean(x): 0.1 | ||
| Mean(y): 0.4 | Mean(y): 0.2 | Mean(y): 0.3 | ||
| σ(x): 0.4 | σ(x): 0.3 | σ(x): 0.2 | ||
| σ(y): 1.1 | σ(y): 0.2 | σ(y): 0.2 | ||
| BBR accuracy | 0.1mrad (~0.1 km) / - | 2&1: Mean(x): 0.07 Mean(y): 0.03 2&3A: Mean(x): 0.17 Mean(y): 0.05 2&4: Mean(x): 0.30 Mean(y): 0.07 2&5: Mean(x): 0.29 Mean(y): 0.09 | 2&1: Mean(x): 0.04 Mean(y): 0.03 2&3A: Mean(x): 0.16 Mean(y): 0.05 2&4: Mean(x): 0.36 Mean(y): 0.09 2&5: Mean(x): 0.27 Mean(y): 0.09 | 2&1: Mean(x): 0.08 Mean(y): 0.09 2&3B: Mean(x): 0.16 Mean(y): 0.13 2&4: Mean(x): 0.17 Mean(y): 0.11 2&5: Mean(x): 0.13 Mean(y): 0.13 |
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Seiz, G.; Foppa, N. National Climate Observing System (GCOS Switzerland). Available online: http://www.gcos.ch (accessed on 15 September 2014).
- Seiz, G.; Foppa, N.; Meier, M.; Paul, F. The role of satellite data within GCOS Switzerland. Remote Sens. 2011, 3, 767–780. [Google Scholar] [CrossRef] [Green Version]
- Global Climate Observing System (GCOS). Available online: http://www.wmo.int/pages/prog/gcos/ (accessed on 14 September 2014).
- World Meteorological Organization (WMO). Systematic Observation Requirements for Satellite-based Products for Climate. Available online: http://www.wmo.int/pages/prog/gcos/Publications/gcos-107.pdf (accessed on 15 September 2014).
- Arnold, G.T; Hubanks, P.A.; Platnick, S.; King, M.D.; Bennartz, R. Impact of Aqua misregistration on MYD06 cloud retrieval properties. In Proceeding of MODIS Science Team Meeting, Washington, DC, USA, 26–28 January 2010.
- EUMETSAT. AVHRR Level 1b Product Guide. Available online: http://oiswww.eumetsat.org/WEBOPS/eps-pg/AVHRR/AVHRR-PG-0TOC.htm (accessed on 21 January 2011).
- Kocaman Aksakal, S. Geometric accuracy investigations of SEVIRI HRV Level 1.5 imagery. Remote Sens. 2013, 5, 2475–2491. [Google Scholar]
- Kocaman Aksakal, S.; Baltsavias, E.; Schindler, K. Analysis of the geometric accuracy of MSG-SEVIRI imagery with focus on estimation of climate variables. In Proceeding of 34th Asian Conference on Remote Sensing, Bali, Indonesia, 20–24 October 2013.
- Kocaman Aksakal, S.; Baltsavias, E.; Schindler, K. Geometric Accuracy Assessment of MSG-SEVIRI Level 1.5 Imagery. Available online: http://www.igp.ethz.ch/photogrammetry/publications/pdf_folder/KocamanEUMETSAT-AMS_13.pdf (accessed on 15 September 2014).
- Khlopenkov, K.; Trishchenko, A.P.; Luo, Y. Achieving subpixel georeferencing accuracy in the Canadian AVHRR processing system. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2150–2161. [Google Scholar] [CrossRef]
- NOAA. Advanced Very High Resolution Radiometer—AVHRR. Available online: http://noaasis.noaa.gov/NOAASIS/ml/avhrr.html (accessed on 15 September 2014).
- Lucas, B.; Kanade, T. An iterative image registration technique with an application to stereo vision. In Proceedings of 7th International Joint Conference on Artificial Intelligence (IJCAI), Vancouver, BC, Canada, 24–28 August 1981; pp. 674–679.
- OpenCV. Available online: http://opencv.org/ (accessed on 30 November 2014).
- Python Imaging Library. Available online: https://pypi.python.org/pypi/PIL (accessed on 30 November 2014).
- Wallis, R. An approach to the space variant restoration and enhancement of images. In Proceedings of Symp. on Current Mathematical Problems in Image Science, Naval Postgraduate School, Monterey, CA, USA, 10–12 November 1976.
- Lanaras, C.; Baltsavias, E.; Schindler, K. A comparison and combination of methods for co-registration of multi-modal images. In Proceedings of 35th Asian Conference on Remote Sensing, Nay Pyi Taw, Myanmar, 27–31 October 2014.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aksakal, S.K.; Neuhaus, C.; Baltsavias, E.; Schindler, K. Geometric Quality Analysis of AVHRR Orthoimages. Remote Sens. 2015, 7, 3293-3319. https://doi.org/10.3390/rs70303293
Aksakal SK, Neuhaus C, Baltsavias E, Schindler K. Geometric Quality Analysis of AVHRR Orthoimages. Remote Sensing. 2015; 7(3):3293-3319. https://doi.org/10.3390/rs70303293
Chicago/Turabian StyleAksakal, Sultan Kocaman, Christoph Neuhaus, Emmanuel Baltsavias, and Konrad Schindler. 2015. "Geometric Quality Analysis of AVHRR Orthoimages" Remote Sensing 7, no. 3: 3293-3319. https://doi.org/10.3390/rs70303293