DEnKF–Variational Hybrid Snow Cover Fraction Data Assimilation for Improving Snow Simulations with the Common Land Model


Abstract
:
1. Introduction
2. Methods
2.1. Common Land Model
2.2. Variational Method


2.3. Deterministic Ensemble Kalman Filter

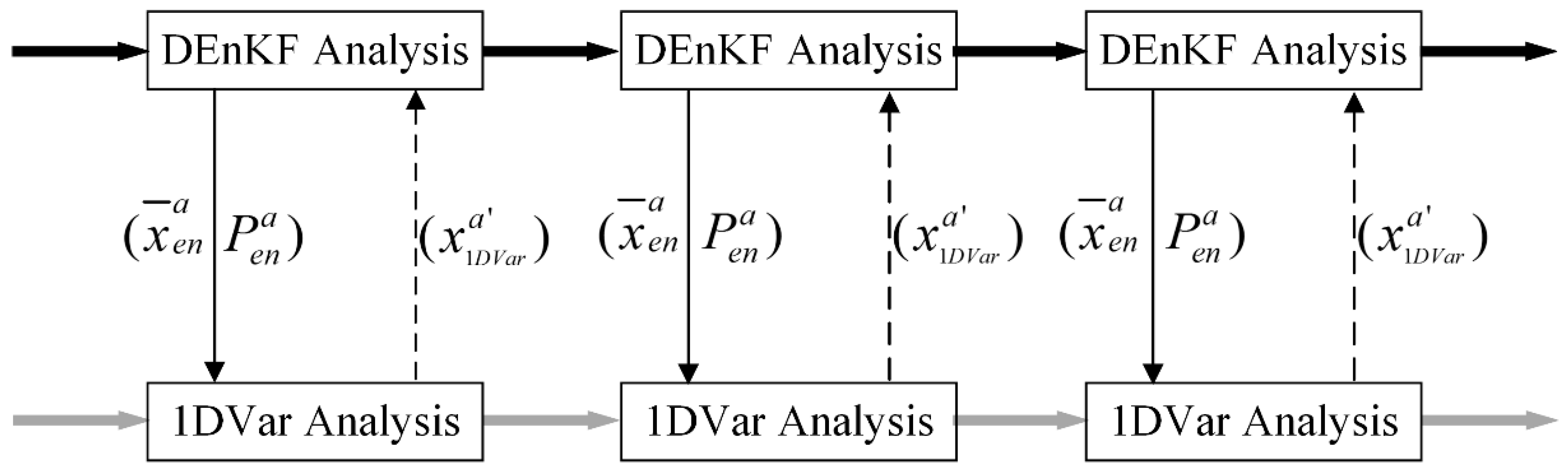
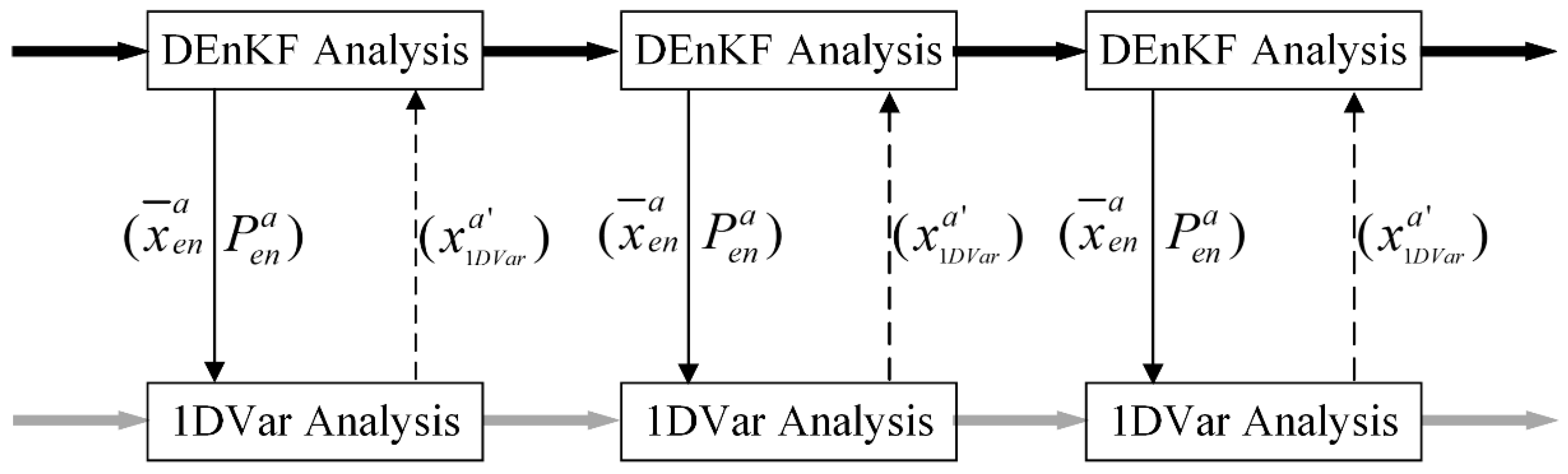
2.4. Coupled Method

2.5. Error Evaluation Methods
3. Experimental Design and Data Sets
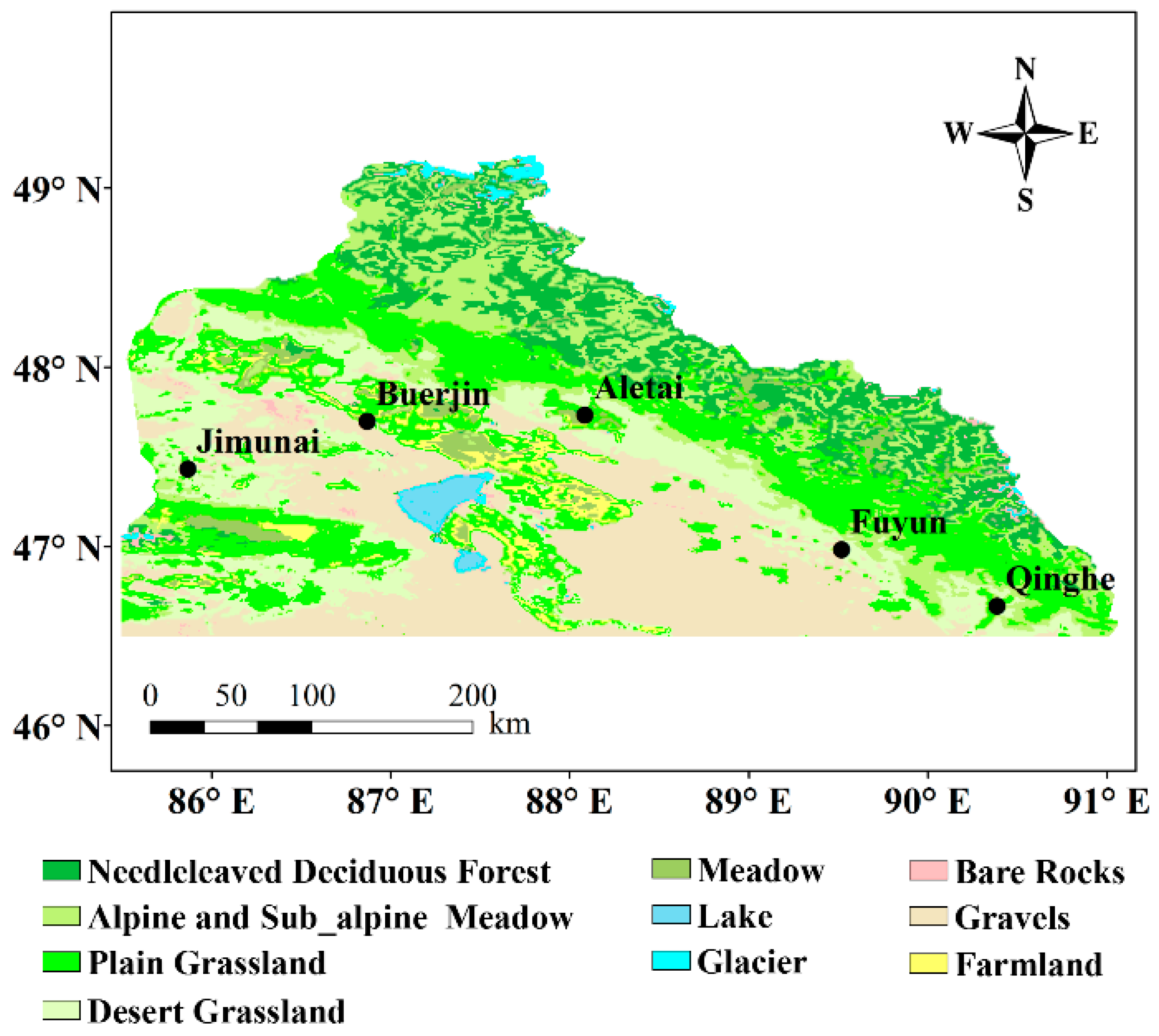
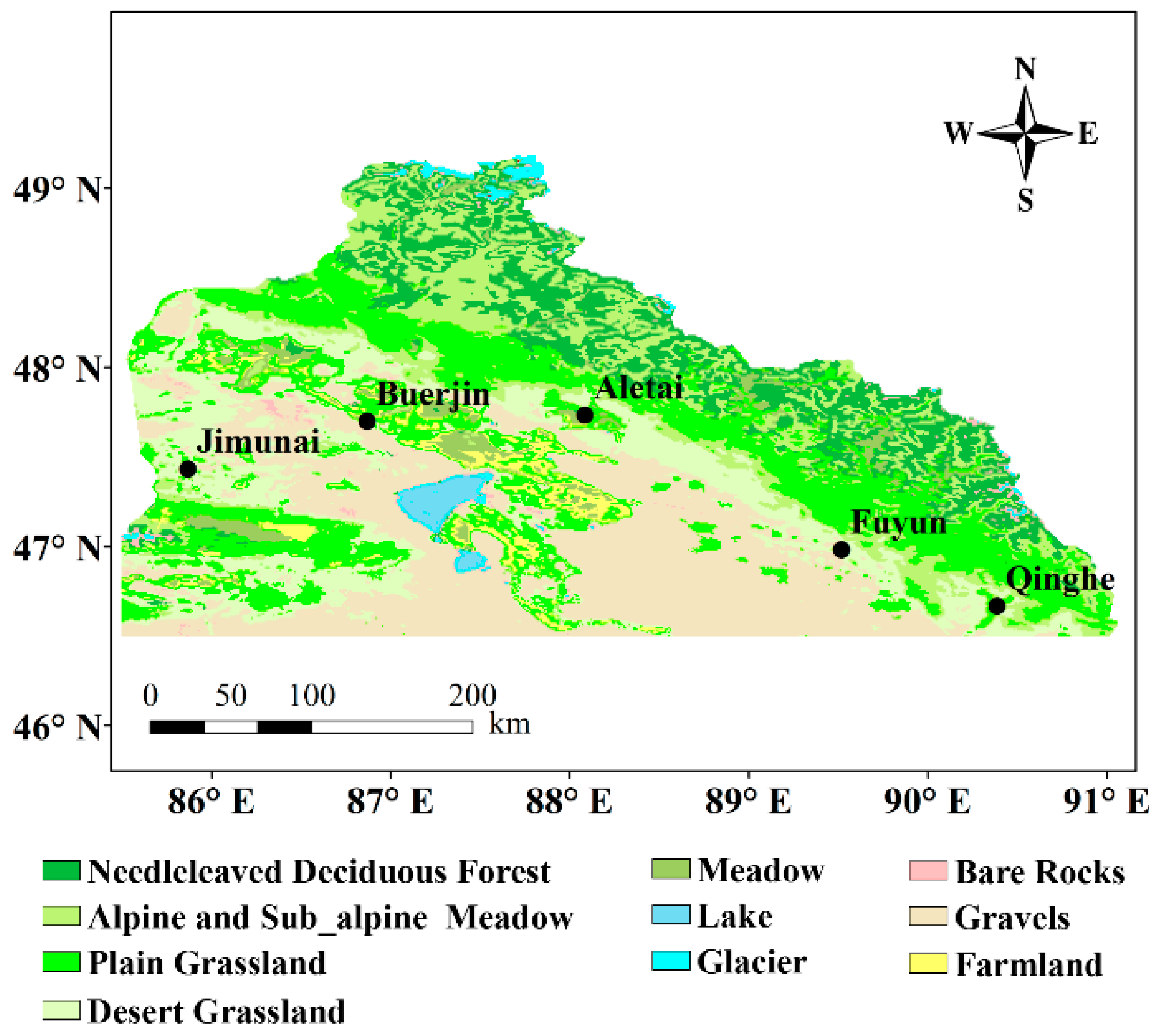
3.1. Experimental Sites

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | Lon | Lat | Elevation (m) | Mean SD (cm) | Mean SWE (mm) | Pairs | Num | σobs (%) |
|---|---|---|---|---|---|---|---|---|
| Aletai | 88.083 | 47.733 | 737 | 32.71 | 88.53 | 86 | 253 | 27.75 |
| Buerjin | 86.867 | 47.400 | 456 | 15.41 | 26.84 | 80 | 125 | 27.78 |
| Fuyun | 89.517 | 46.983 | 826 | 15.99 | 69.77 | 91 | 206 | 22.85 |
| Jimunai | 85.867 | 47.433 | 984 | 22.80 | 36.68 | 83 | 248 | 28.56 |
| Qinghe | 90.383 | 46.667 | 1 200 | 14.35 | 61.37 | 96 | 175 | 29.70 |
3.2. MODIS Snow Cover Fraction
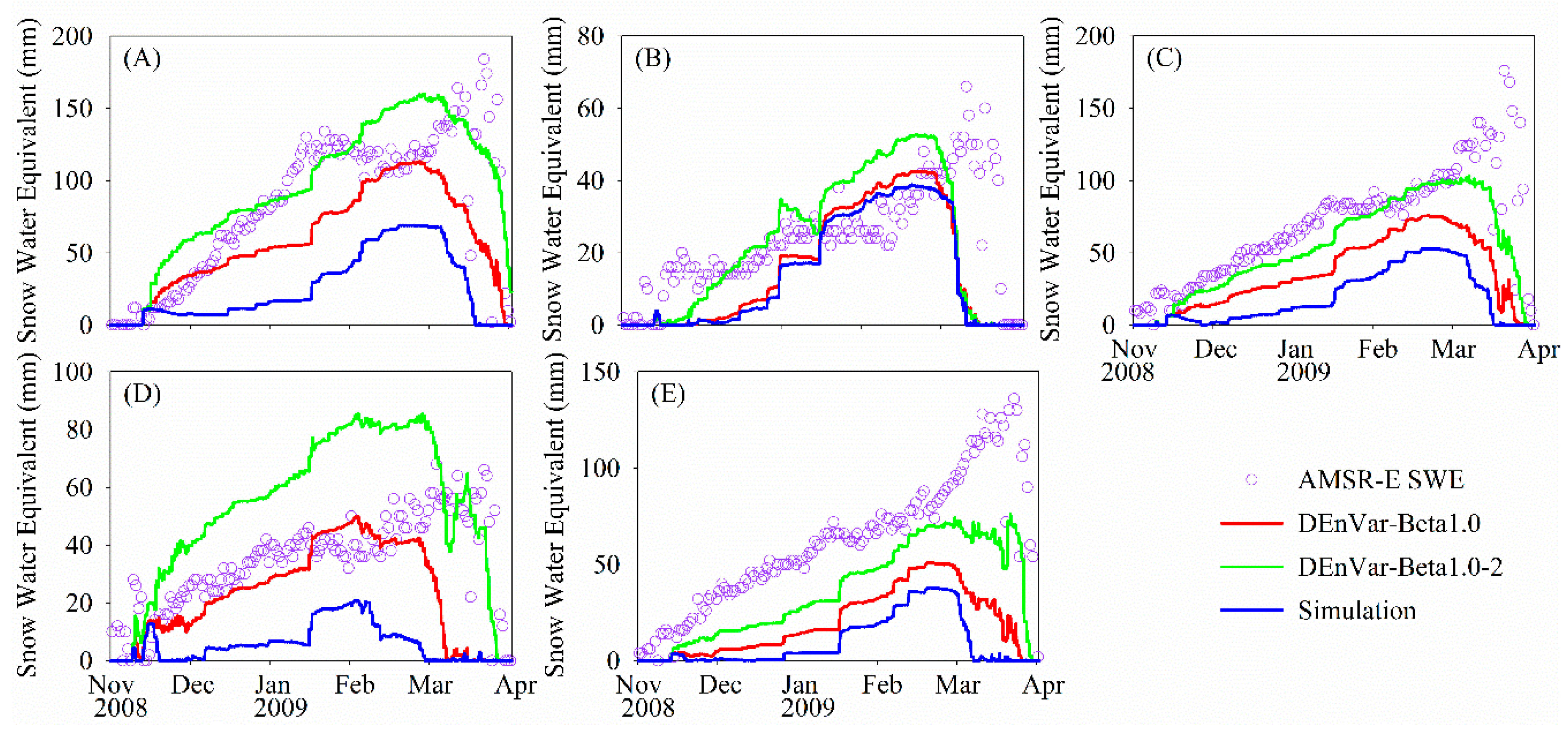
3.3. AMSR-E Snow Water Equivalent
3.4. Experimental Design

| Experiments | Description |
|---|---|
| Simulation | No snow DA |
| 1DVar | Snow DA using 1DVar with static covariance from NMC method |
| DEnKF | Snow DA using DEnKF with ensemble size of 25 |
| EnVar-Beta 0.5 | Snow DA using a hybrid method like Zhang, Zhang and Poterjoy [36] with ensemble size of 25, weighting coefficient of 0.5 |
| DEnVar-Beta 0.5 | Snow DA using the proposed hybrid method with ensemble size of 25, weighting coefficient of 0.5 in Equation (11) |
| DEnVar-Beta 0.8 | Sensitivity DEnVar with ensemble size of 25, weighting coefficient of 0.8 in Equation (11) |
| DEnVar-Beta 1.0 | Sensitivity DEnVar with ensemble size of 25, weighting coefficient of 1.0 in Equation (11) |
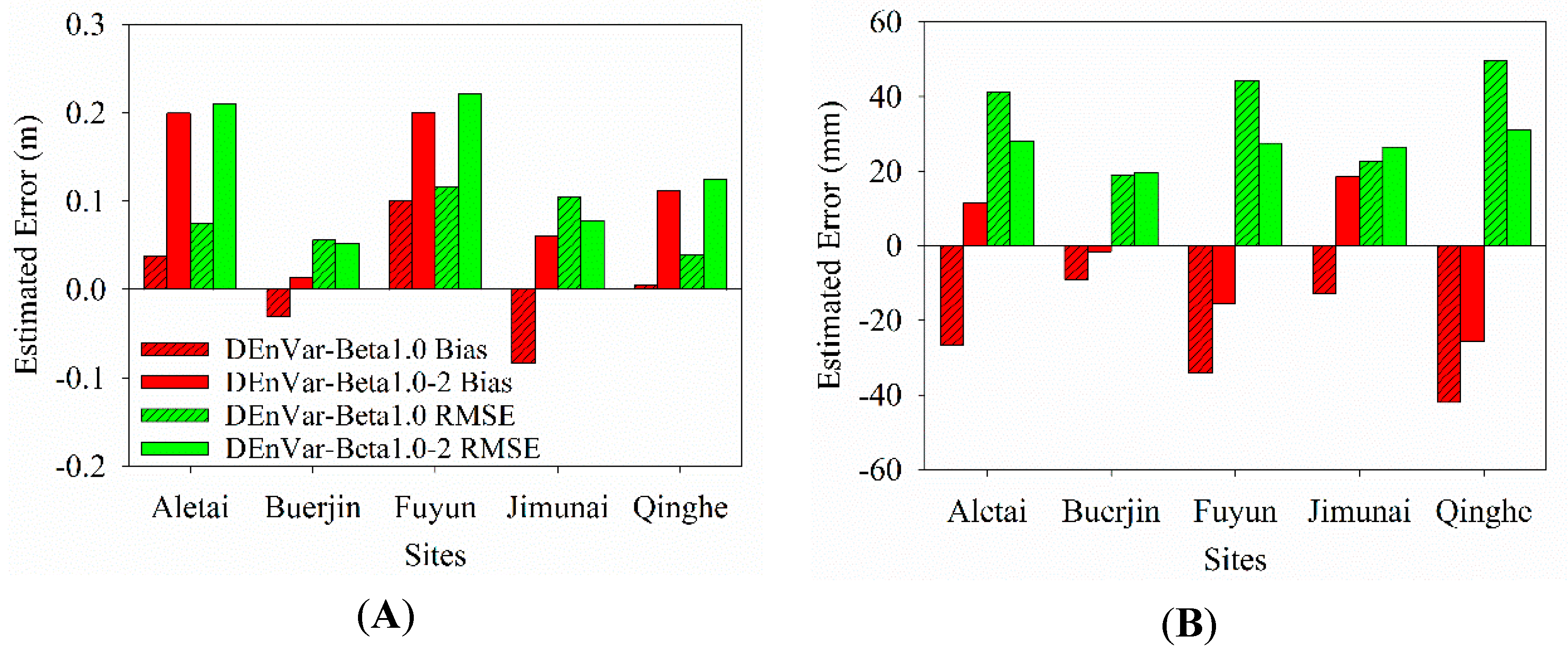
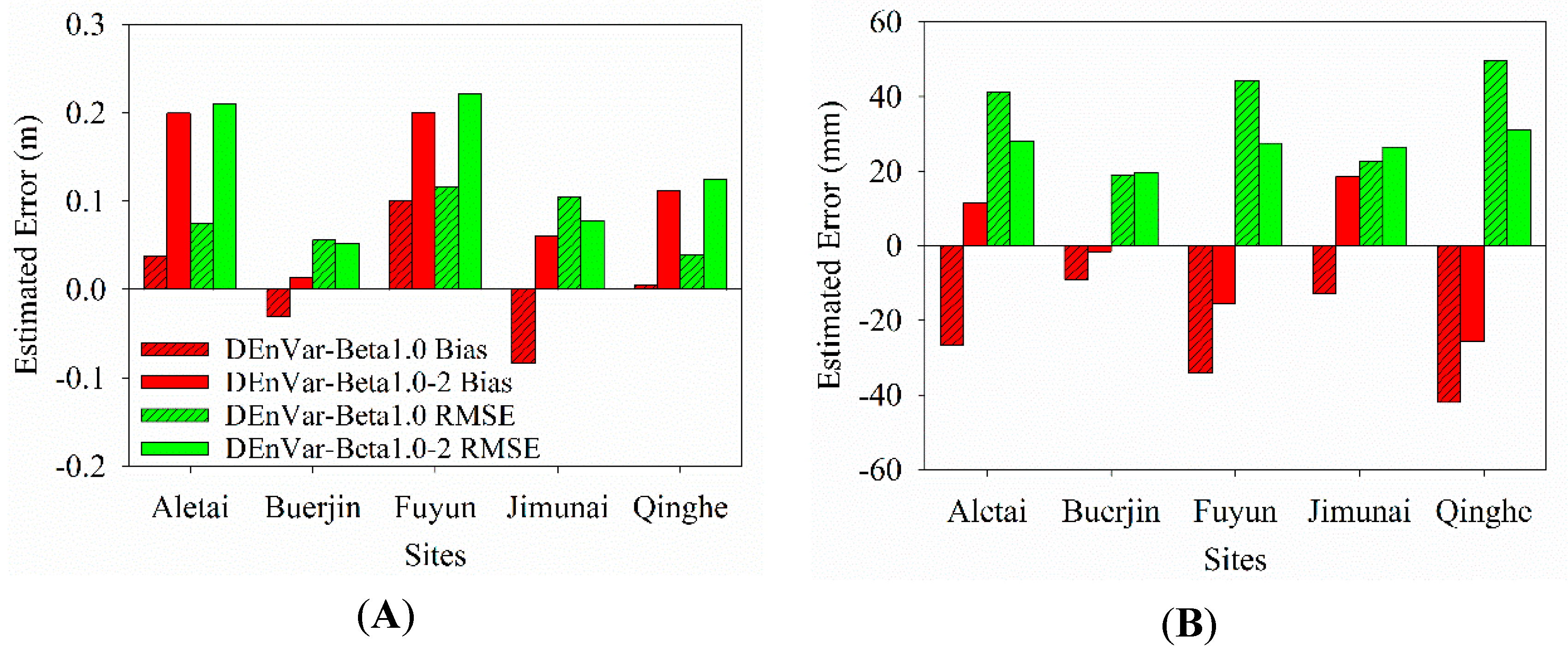
| DEnVar-Beta 1.0–2 | Same as DEnVar-Beta1.0 with MODIS SCF observation error of 10% |
4. Results
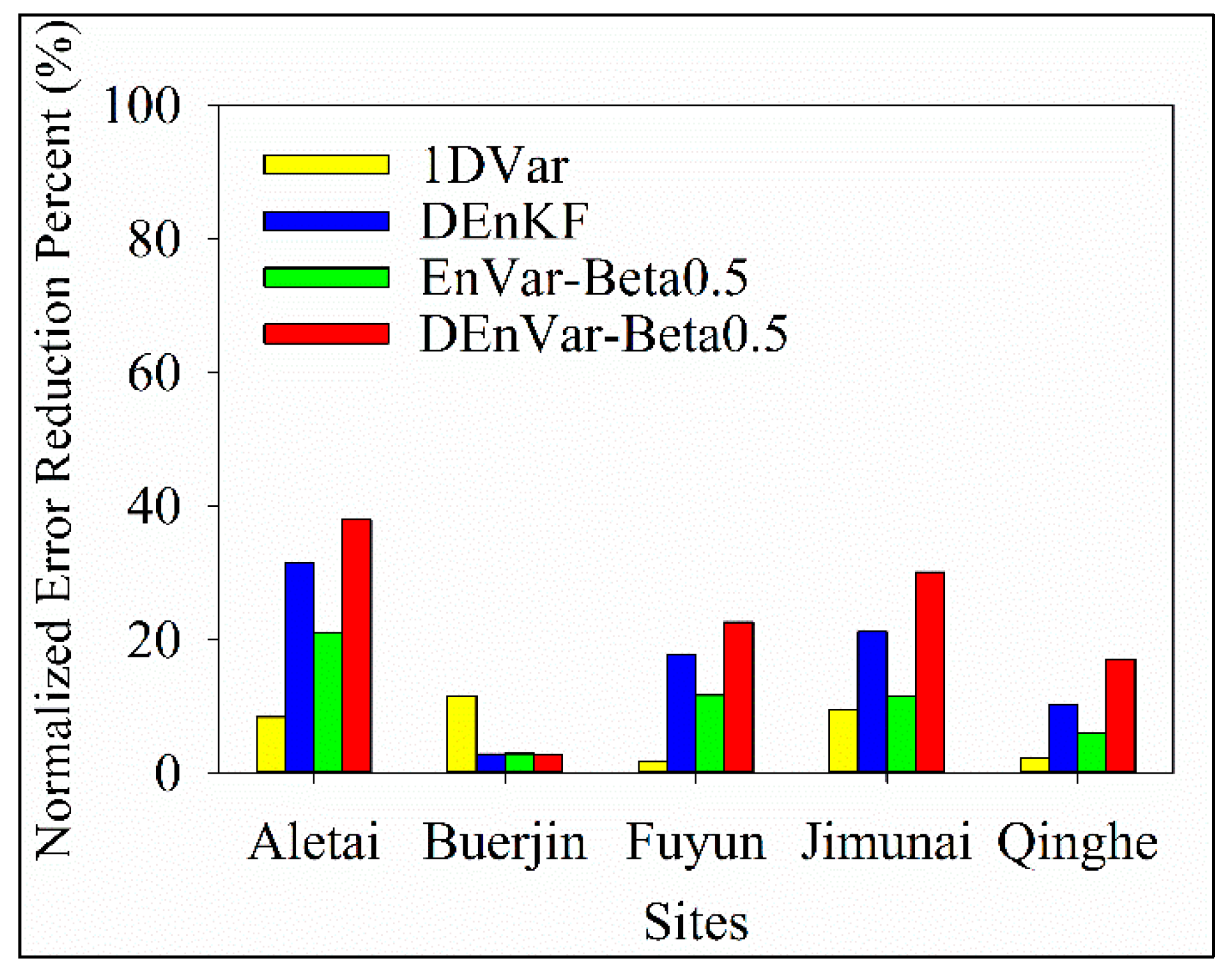
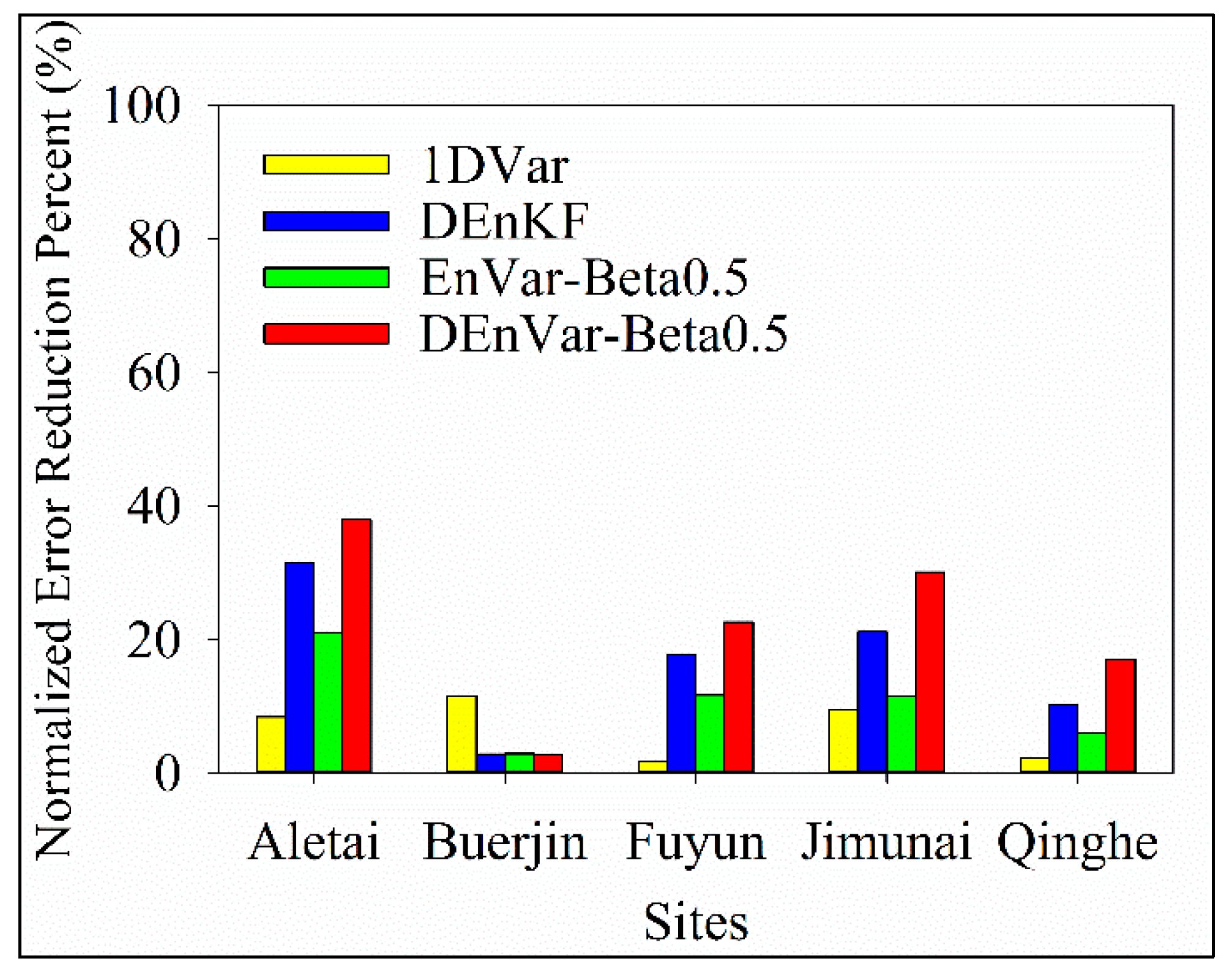
4.1. Snow Data Assimilation Using Different Methods
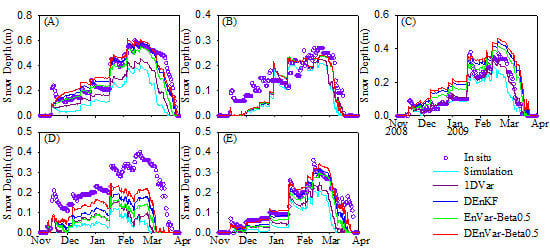
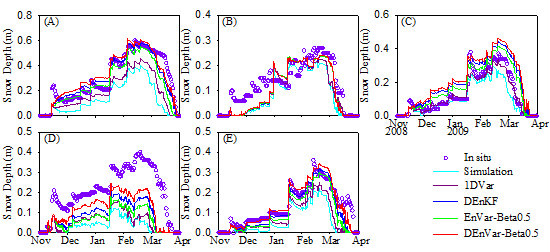
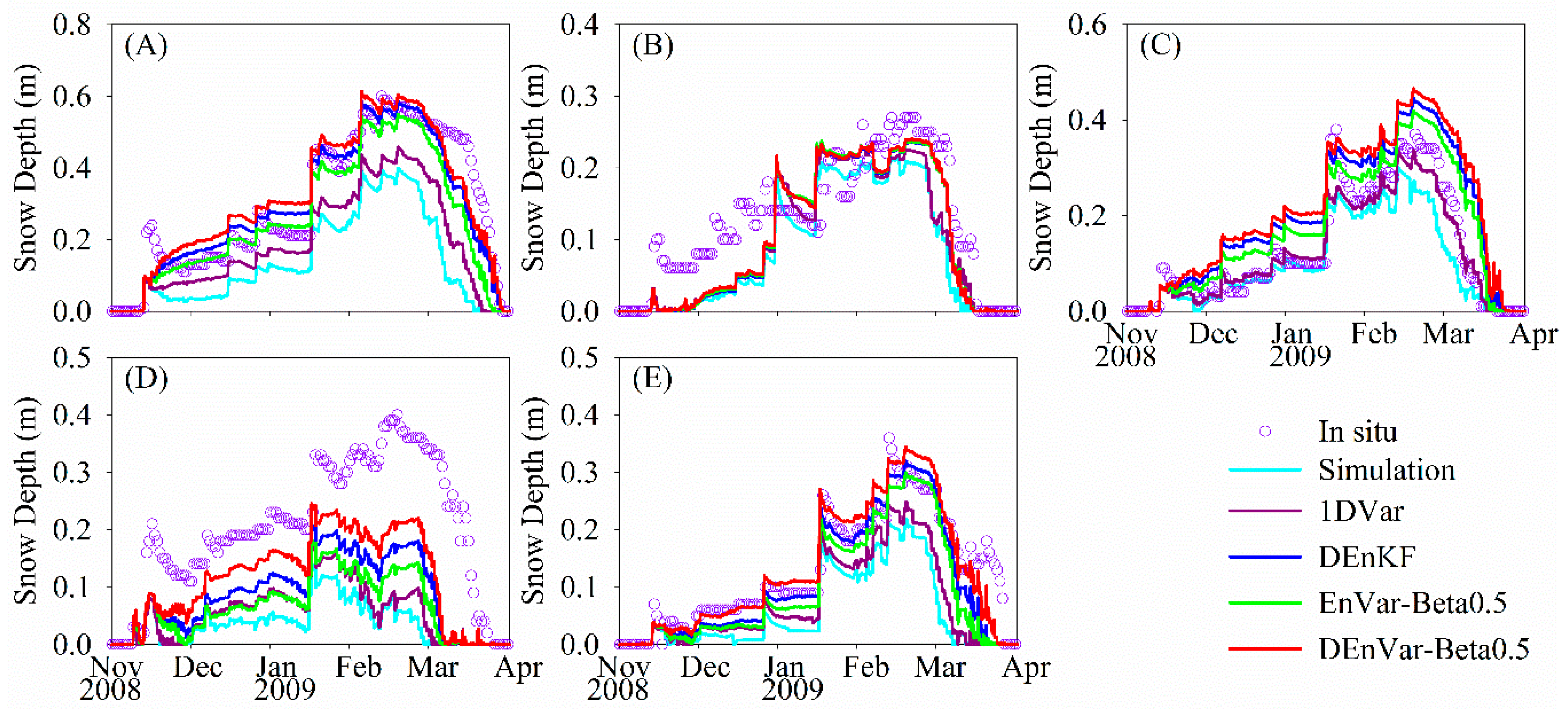
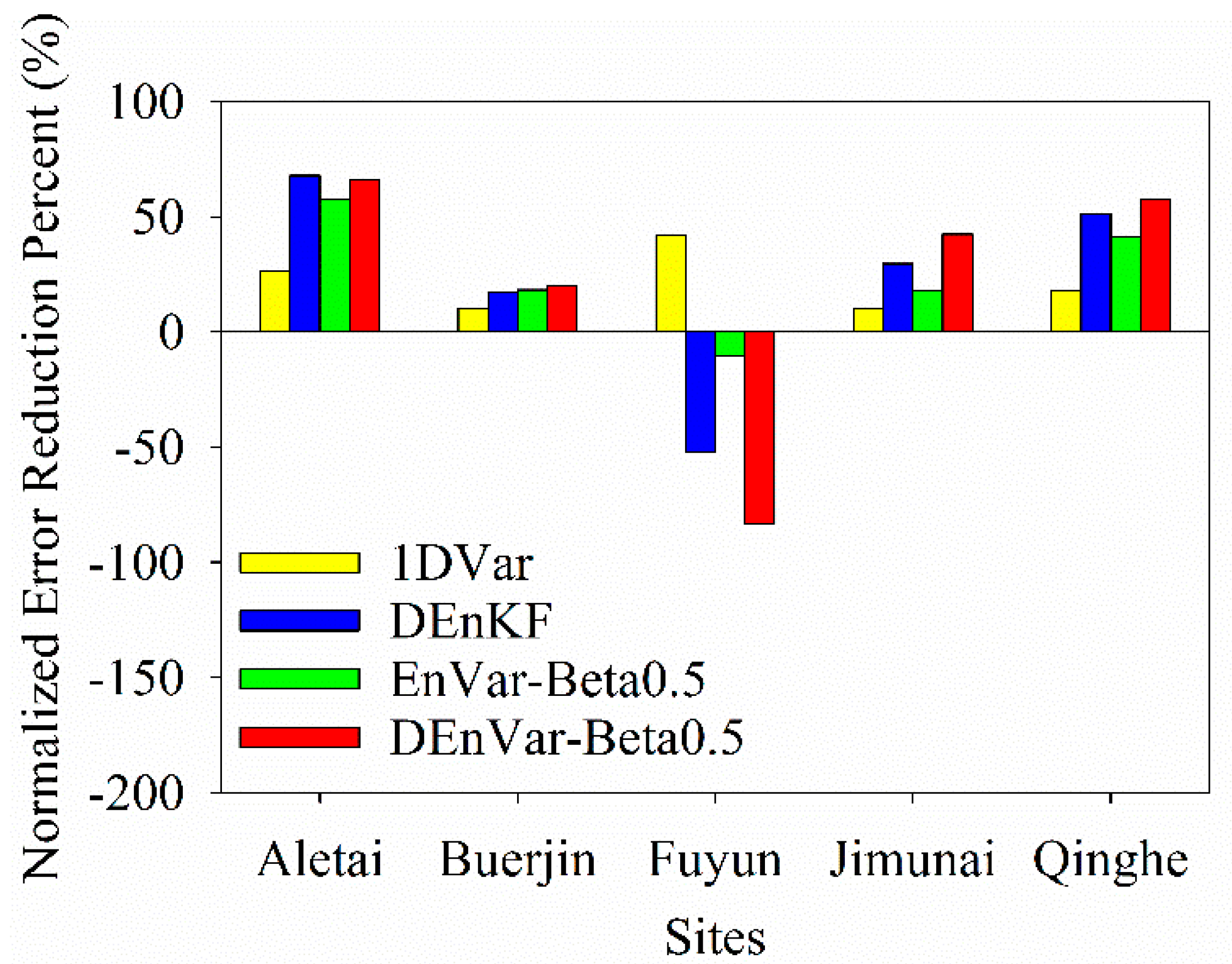
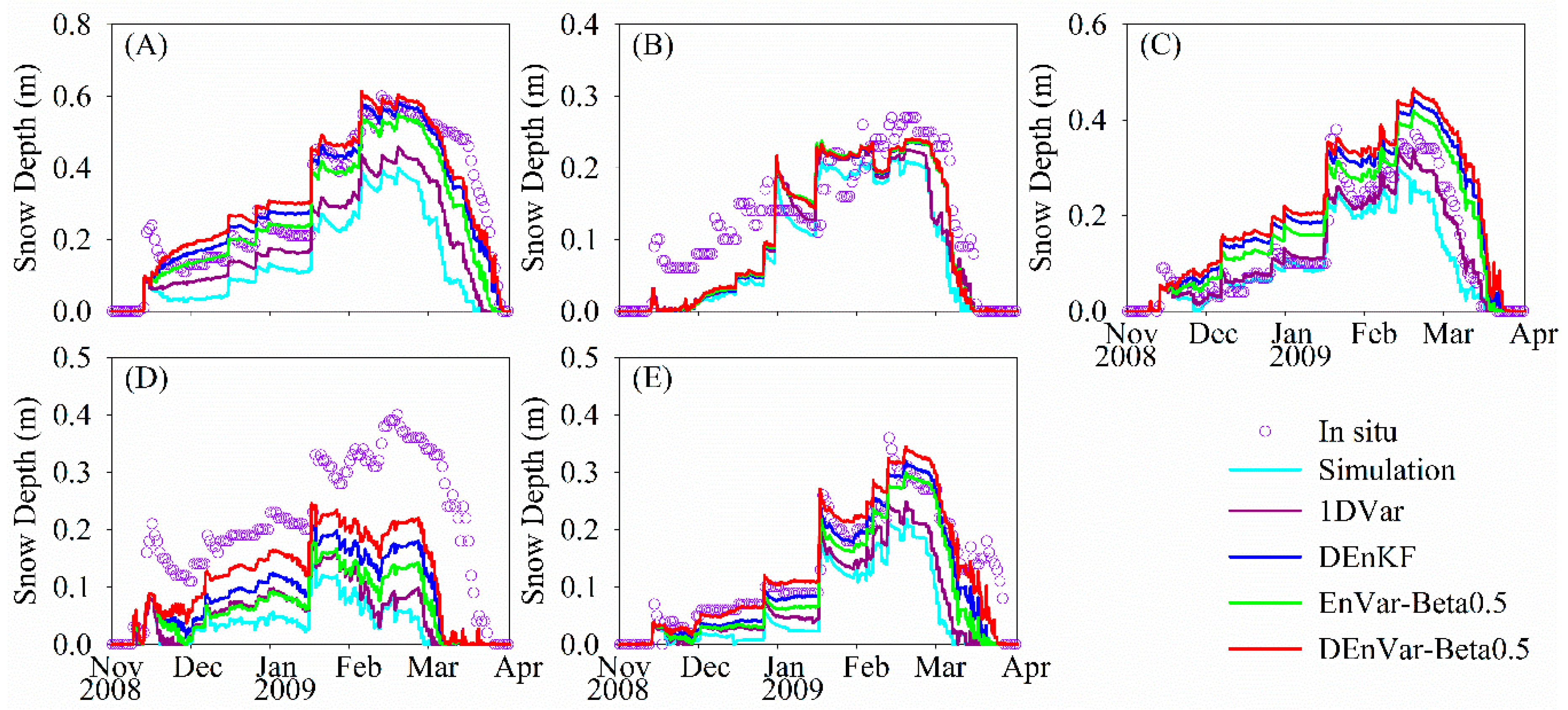
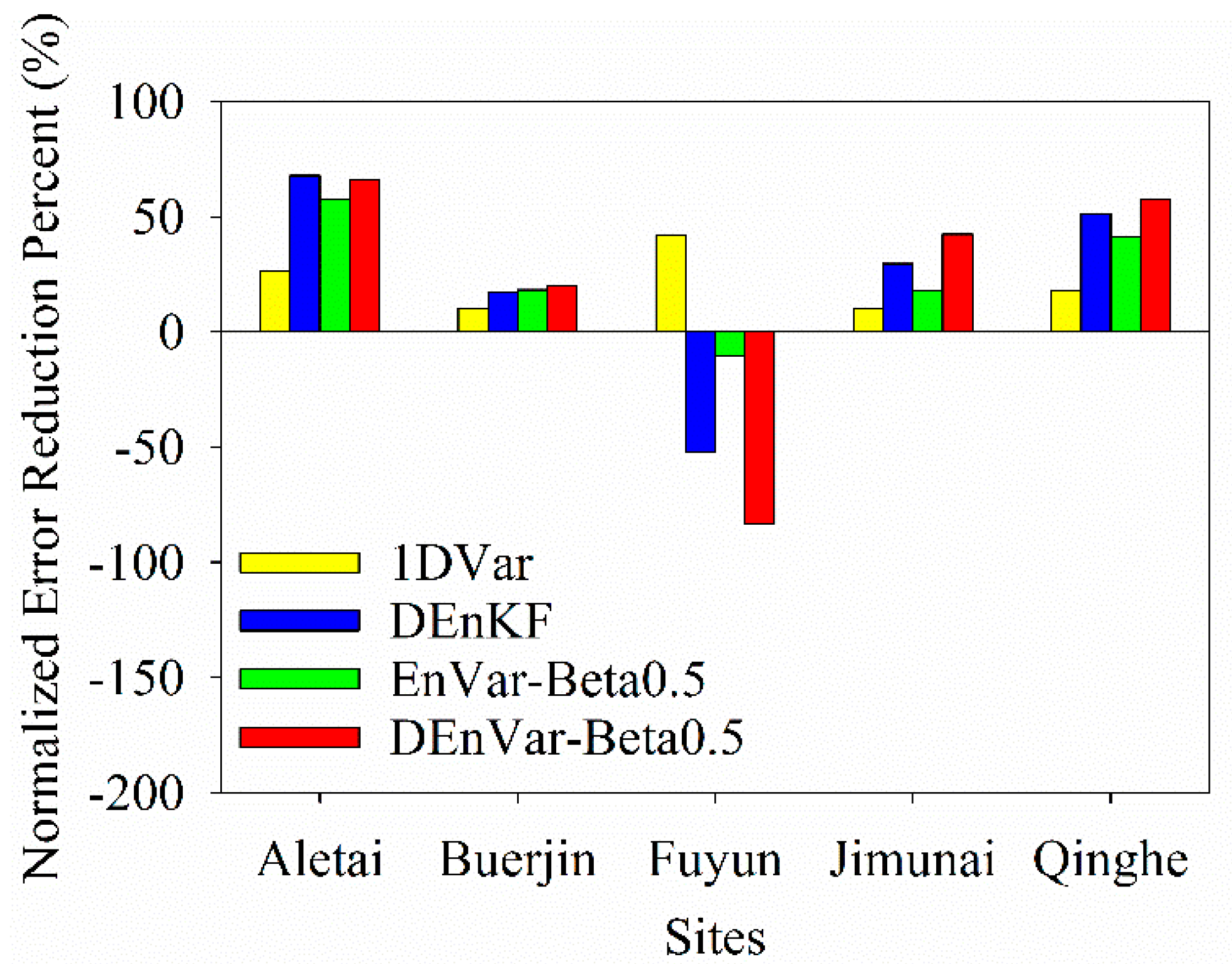
4.1.1. Comparison with In situ SD Observations
| Index | Experiment | Aletai | Buerjin | Fuyun | Jimunai | Qinghe |
|---|---|---|---|---|---|---|
| Bias (m) | Simulation | −0.1759 | −0.0529 | −0.0398 | −0.1887 | −0.0811 |
| 1DVar | −0.1221 | −0.0385 | −0.0141 | −0.1670 | −0.0630 | |
| DEnKF | −0.0071 | −0.0301 | 0.0714 | −0.1311 | −0.0218 | |
| EnVar-Beta 0.5 | −0.0453 | −0.0295 | 0.0459 | −0.1549 | −0.0369 | |
| DEnVar-Beta 0.5 | 0.0185 | −0.0290 | 0.0897 | −0.1011 | 0.0028 | |
| RMSE (m) | Simulation | 0.2011 | 0.0689 | 0.0577 | 0.2070 | 0.0927 |
| 1DVar | 0.1476 | 0.0618 | 0.0336 | 0.1860 | 0.0759 | |
| DEnKF | 0.0645 | 0.0569 | 0.0878 | 0.1456 | 0.0453 | |
| EnVar-Beta 0.5 | 0.0851 | 0.0563 | 0.0637 | 0.1696 | 0.0543 | |
| DEnVar-Beta 0.5 | 0.0678 | 0.0550 | 0.1058 | 0.1192 | 0.0391 | |
| Correlation | Simulation | 0.8391 | 0.8582 | 0.9617 | 0.5808 | 0.8560 |
| 1DVar | 0.8966 | 0.8599 | 0.9782 | 0.6281 | 0.8809 | |
| DEnKF | 0.9450 | 0.8820 | 0.9259 | 0.8162 | 0.9304 | |
| EnVar-Beta 0.5 | 0.9273 | 0.8828 | 0.9422 | 0.7807 | 0.9169 | |
| DEnVar-Beta 0.5 | 0.9434 | 0.8885 | 0.9146 | 0.8183 | 0.9463 |
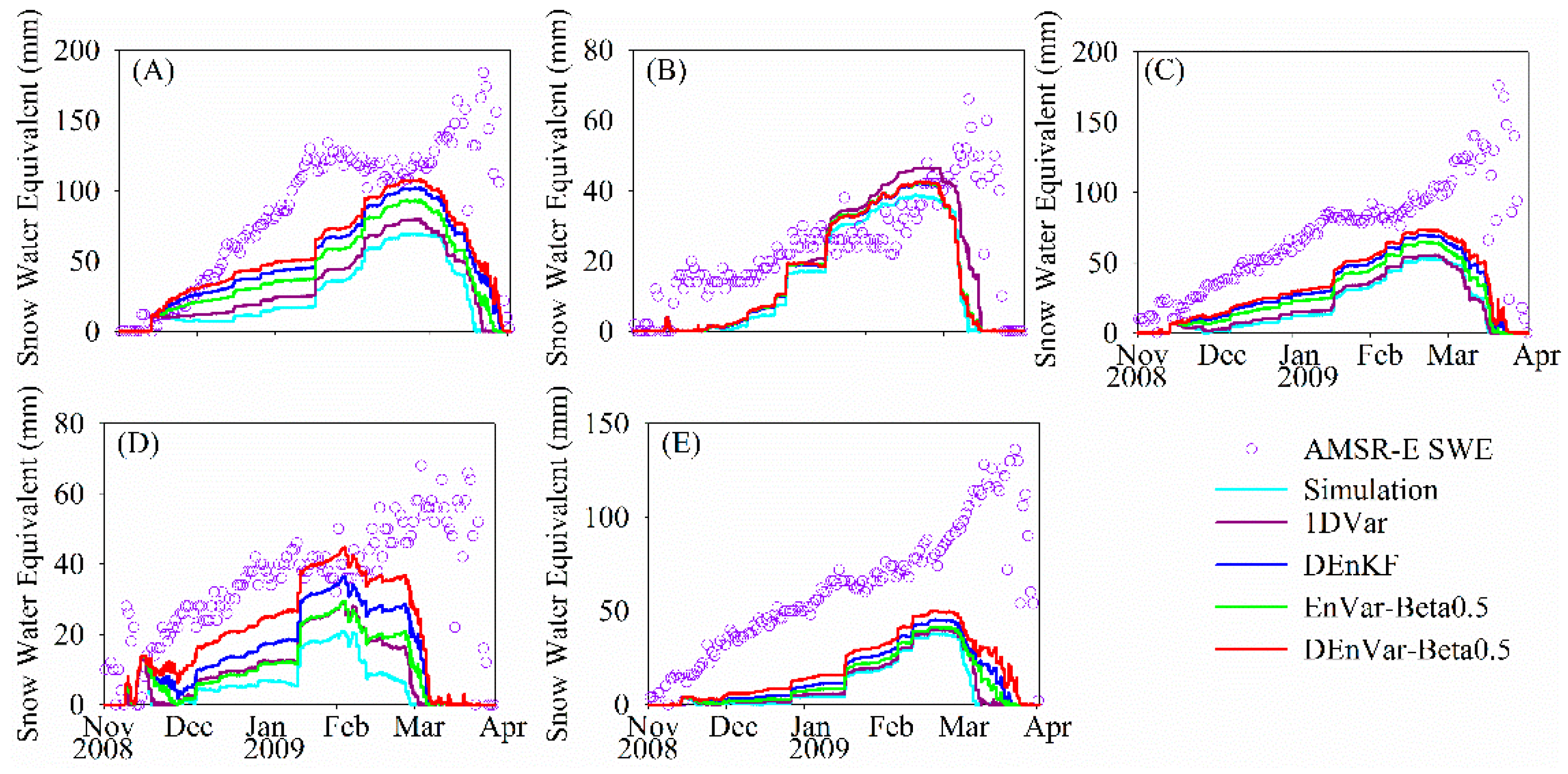
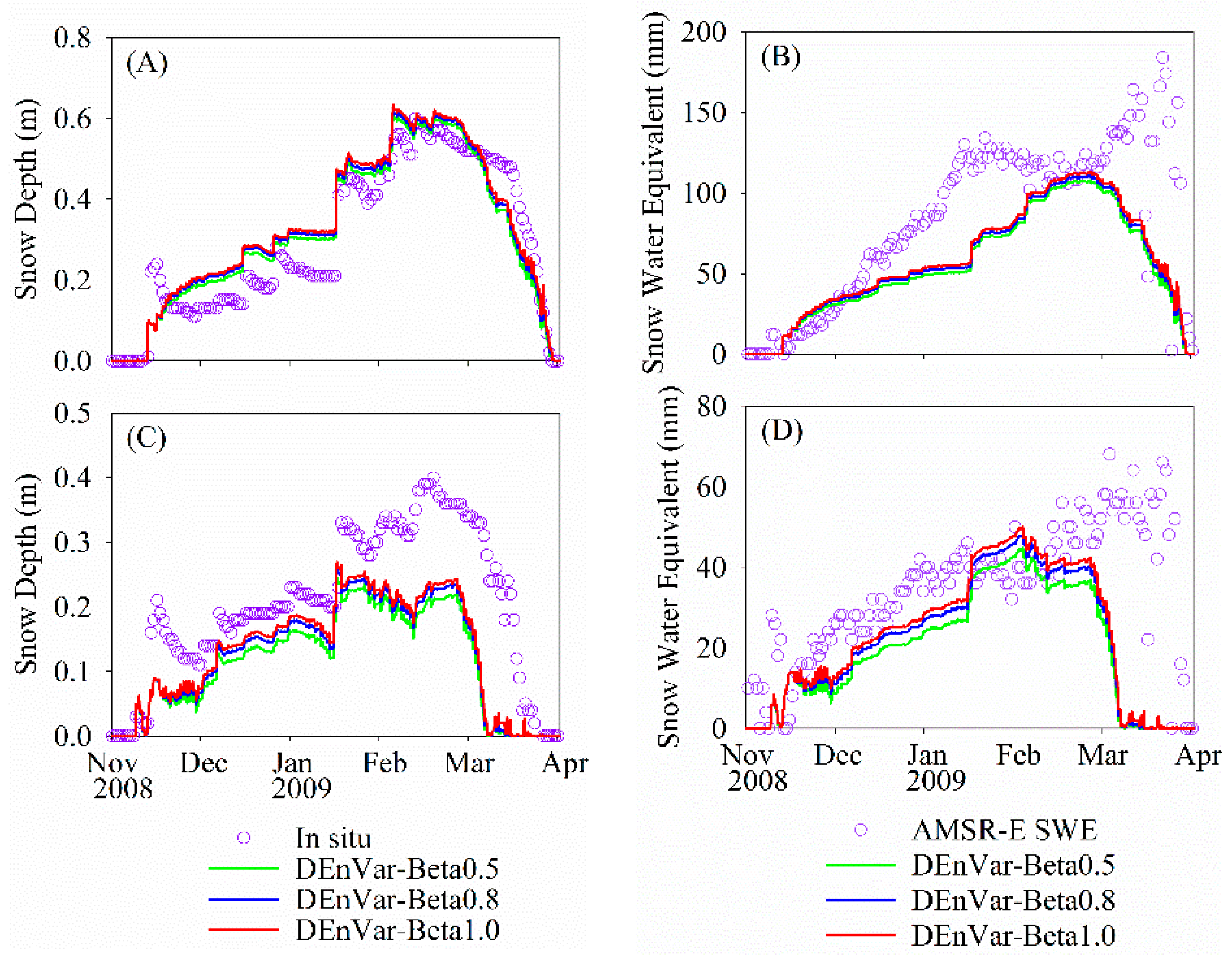
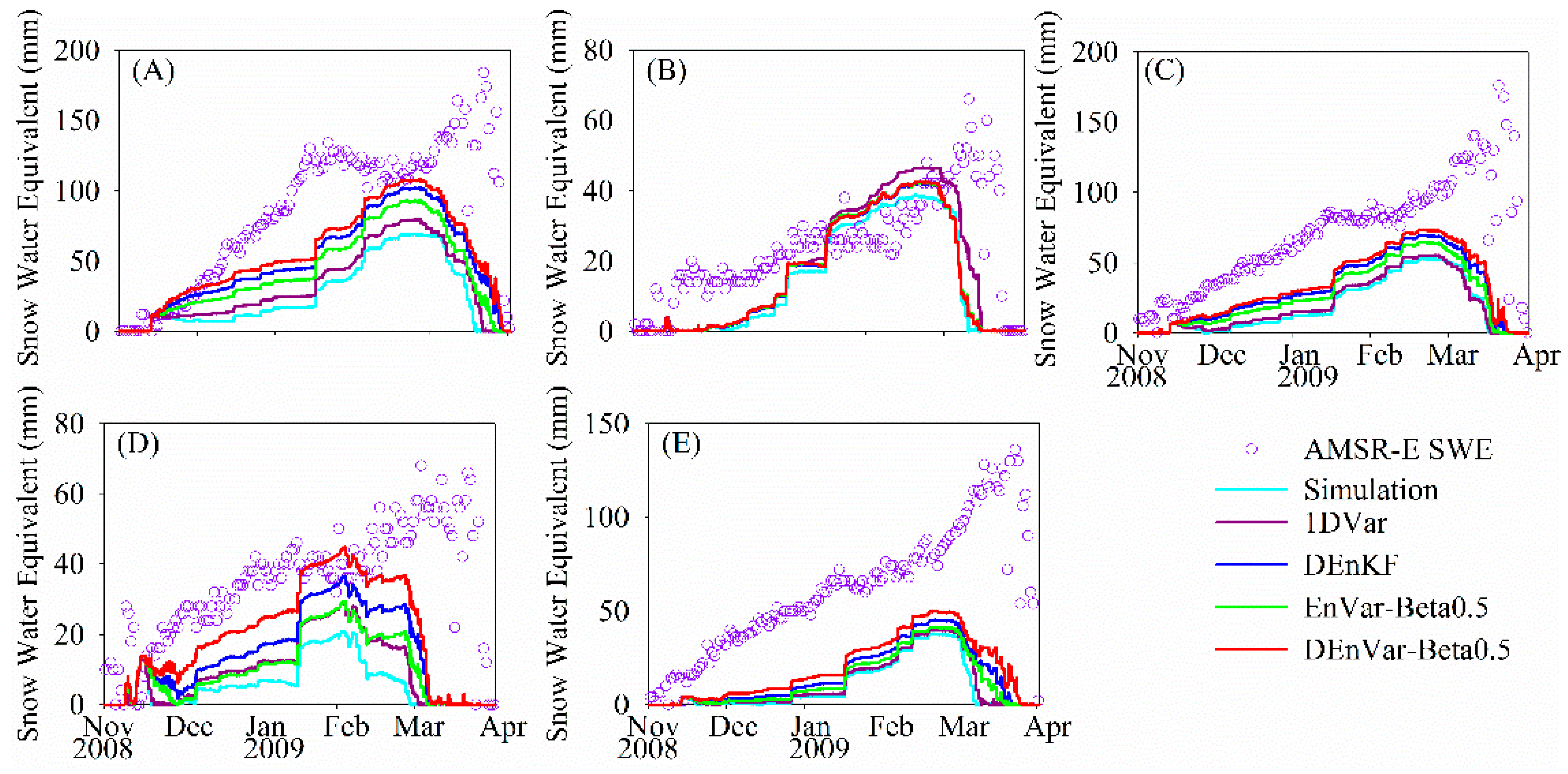
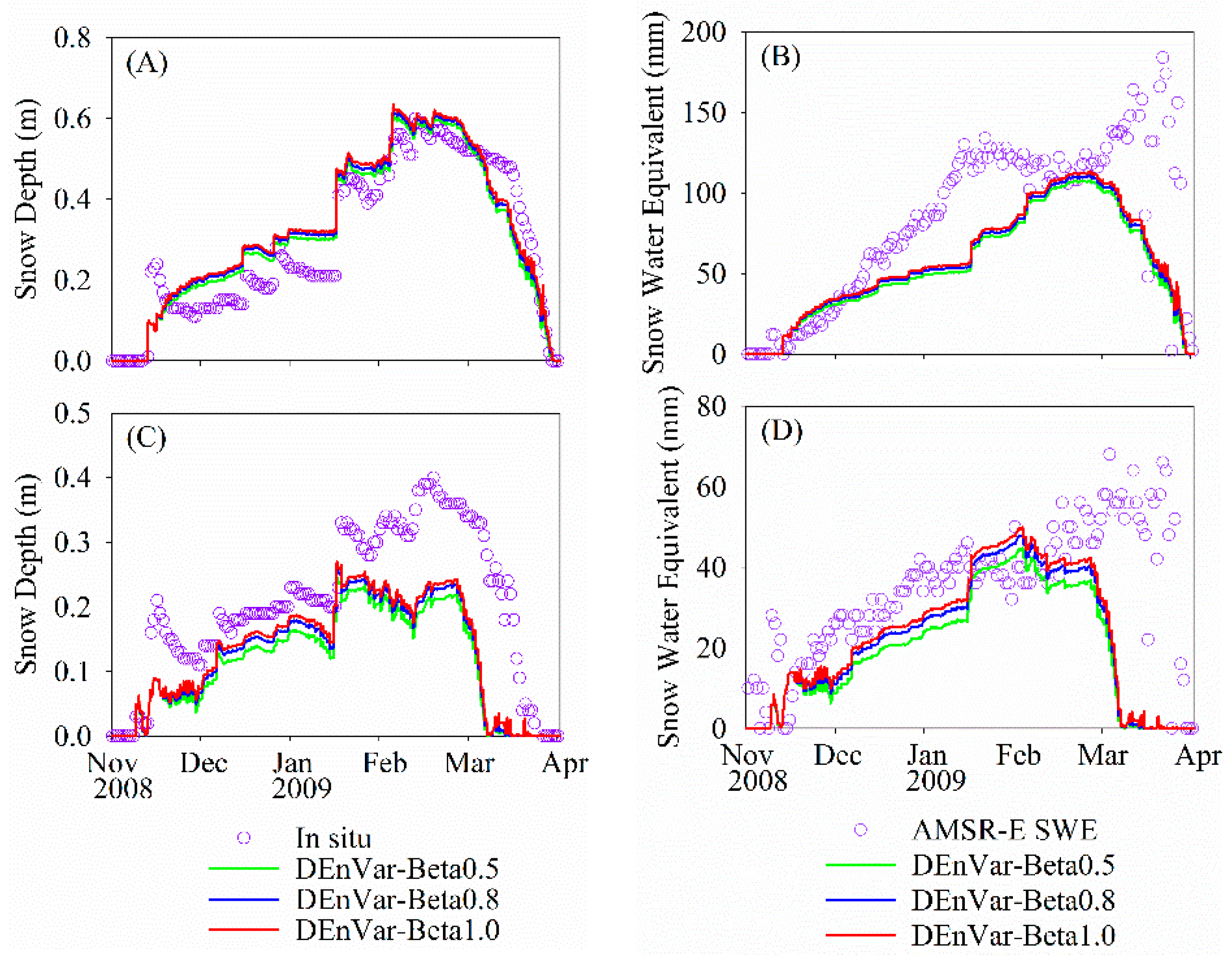
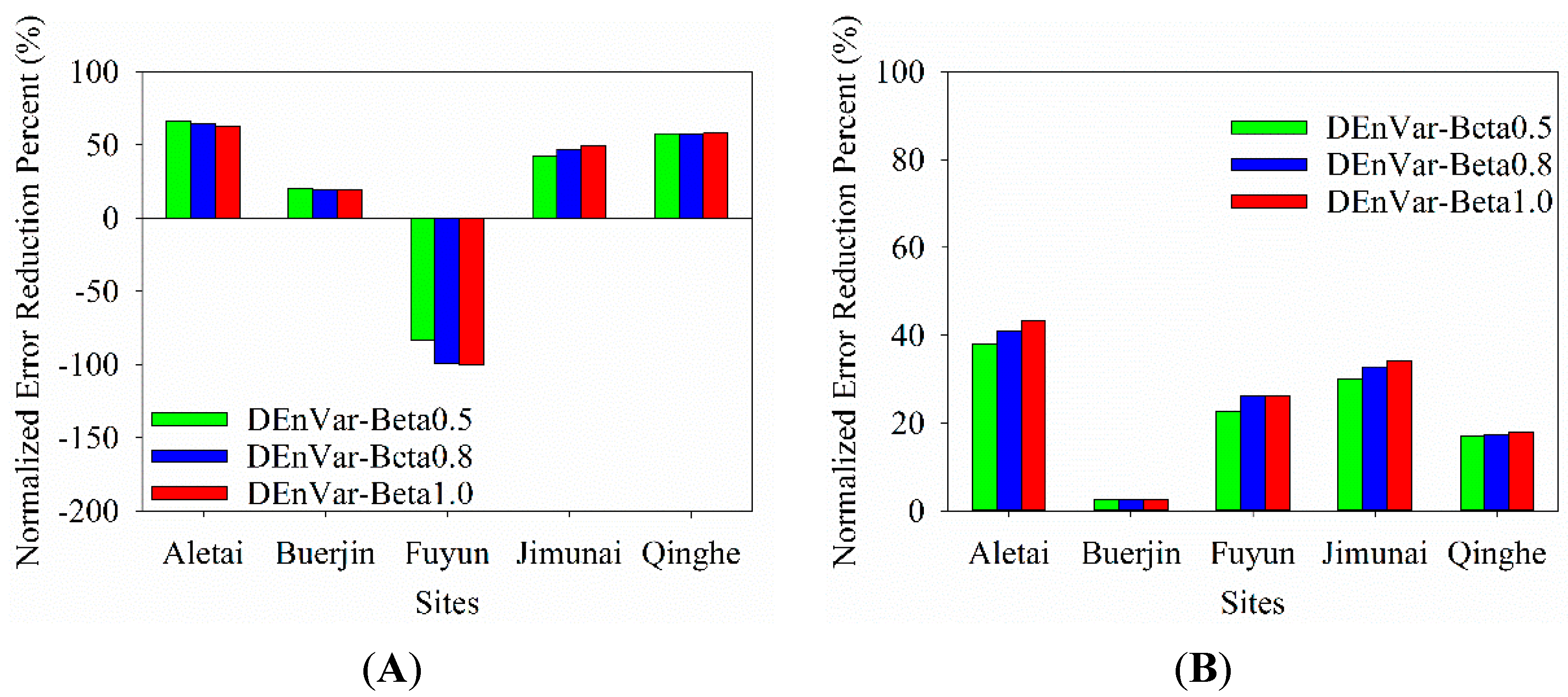
4.1.2. Comparison with AMSR-E SWE Observations
| Index | Experiment | Aletai | Buerjin | Fuyun | Jimunai | Qinghe |
|---|---|---|---|---|---|---|
| Bias (mm) | Simulation | −60.6890 | −10.7972 | −51.1207 | −30.8255 | −51.9142 |
| 1DVar | −54.1836 | −6.5794 | −49.6650 | −26.8484 | −50.5498 | |
| DEnKF | −36.1520 | −9.1861 | −38.9930 | −21.8406 | −46.2824 | |
| EnVar-Beta 0.5 | −43.9760 | −8.9642 | −43.0146 | −26.2549 | −48.6462 | |
| DEnVar-Beta 0.5 | −30.7429 | −8.9699 | −36.0278 | −16.3484 | −42.4852 | |
| Simulation | 72.1651 | 19.5319 | 59.9968 | 34.2670 | 60.4474 | |
| RMSE (mm) | 1DVar | 66.0648 | 17.2661 | 58.9658 | 30.9795 | 59.0669 |
| DEnKF | 49.4169 | 18.9730 | 49.2967 | 27.0125 | 54.2969 | |
| EnVar-Beta 0.5 | 57.0112 | 18.9613 | 52.9896 | 30.3120 | 56.7938 | |
| DEnVar-Beta 0.5 | 44.7758 | 18.9999 | 46.4075 | 23.9441 | 50.1661 | |
| Correlation | Simulation | 0.5940 | 0.4602 | 0.5499 | 0.1439 | 0.3393 |
| 1DVar | 0.6361 | 0.5819 | 0.5339 | 0.2447 | 0.3715 | |
| DEnKF | 0.7420 | 0.4782 | 0.6021 | 0.3305 | 0.5072 | |
| EnVar-Beta 0.5 | 0.6809 | 0.4769 | 0.5712 | 0.2767 | 0.4538 | |
| DEnVar-Beta 0.5 | 0.7657 | 0.4740 | 0.6339 | 0.3495 | 0.5936 |
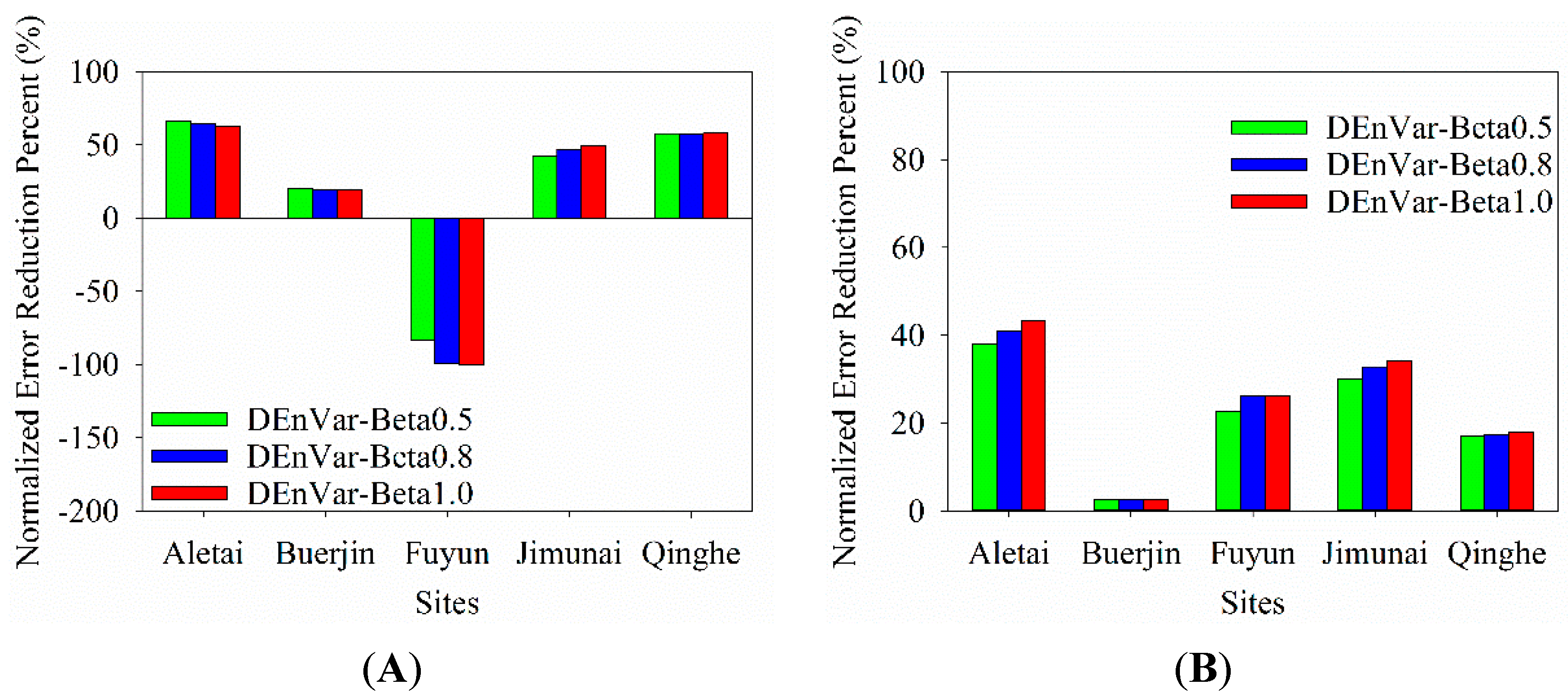
4.2. Sensitivity to Weighting Coefficients
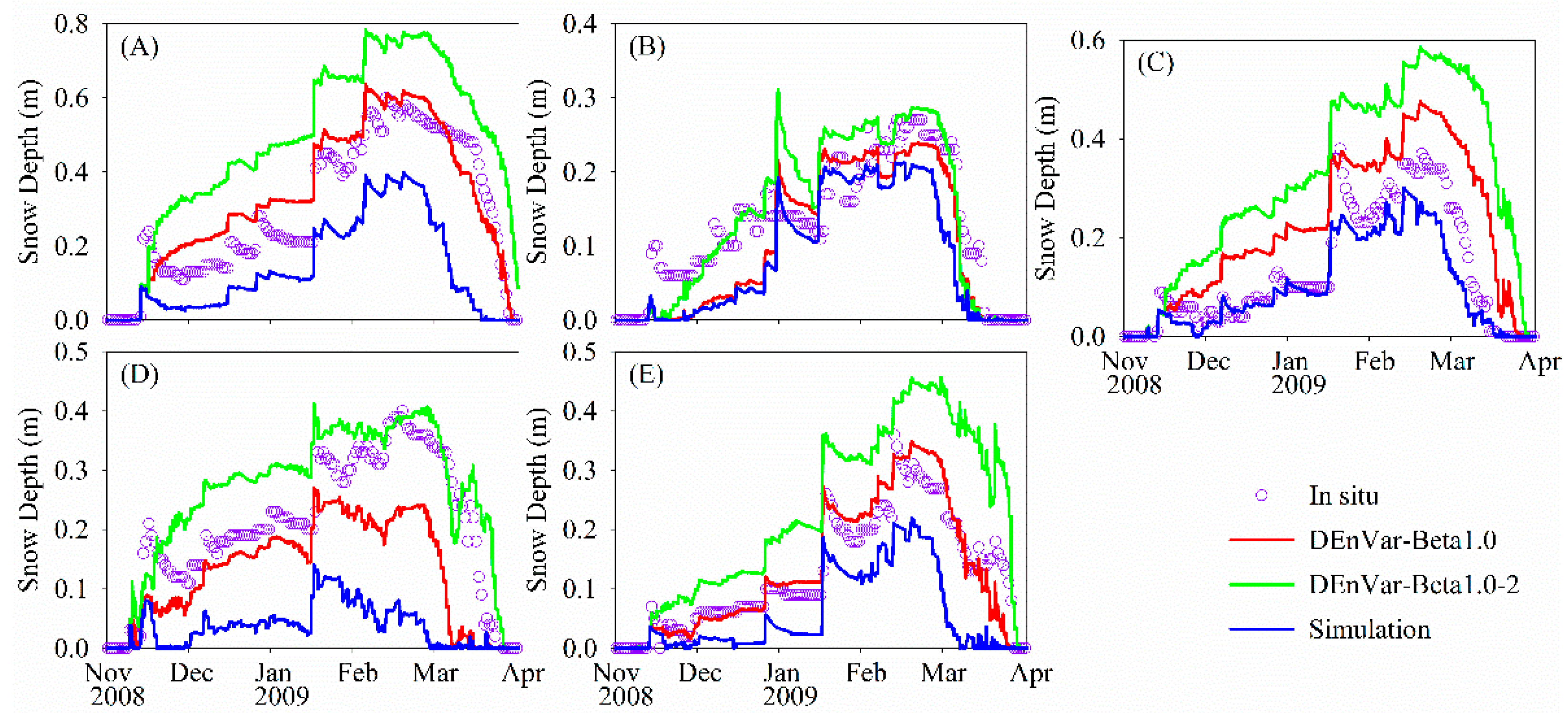
4.3. Sensitivity to Observation Error
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Simic, A.; Fernandes, R.; Brown, R.; Romanov, P.; Park, W. Validation of vegetation, MODIS, and GOES+ SSM/I snow-cover products over canada based on surface snow depth observations. Hydrol. Process. 2004, 18, 1089–1104. [Google Scholar] [CrossRef]
- Evaluation of Surface Albedo and Snow Cover in AR4 Coupled Climate Models. Available online: http://onlinelibrary.wiley.com/doi/10.1029/2005JD006473/citedby (accessed on 16 August 2006).
- Frei, A.; Tedesco, M.; Lee, S.; Foster, J.; Hall, D.K.; Kelly, R.; Robinson, D.A. A review of global satellite-derived snow products. Adv. Space Resour. 2012, 50, 1007–1029. [Google Scholar] [CrossRef]
- Evaluation of an Improved Intermediate Complexity Snow Scheme in the Orchidee Land Surface Model. Available online: http://onlinelibrary.wiley.com/doi/10.1002/jgrd.50395/abstract (accessed on 27 June 2013).
- Scanning Multichannel Microwave Radiometer Snow Water equivalent Assimilation. Available online: http://onlinelibrary.wiley.com/doi/10.1029/2006JD007209/abstract (accessed on 16 April 2007).
- Liang, T.G.; Zhang, X.T.; Xie, H.J.; Wu, C.X.; Feng, Q.S.; Huang, X.D.; Chen, Q.G. Toward improved daily snow cover mapping with advanced combination of MODIS and AMSR-E measurements. Remote Sens. Environ. 2008, 112, 3750–3761. [Google Scholar] [CrossRef]
- Dai, L.; Che, T.; Wang, J.; Zhang, P. Snow depth and snow water equivalent estimation from AMSR-E data based on a priori snow characteristics in Xinjiang, China. Remote Sens. Environ. 2012, 127, 14–29. [Google Scholar] [CrossRef]
- Liang, T.G.; Liu, X.Y.; Wu, C.X.; Guo, Z.G.; Huang, X.D. An evaluation approach for snow disasters in the pastoral areas of northern Xinjiang, China. New Zeal. J. Agr. Res. 2007, 50, 369–380. [Google Scholar] [CrossRef]
- Liang, T.G.; Wu, C.X.; Chen, Q.G.; Xu, Z.B. Snow classification and monitoring models in the pastoral areas of the northern Xinjiang. J. Glaciol. Geocryol. 2004, 26, 160–165. [Google Scholar]
- Zaitchik, B.F.; Rodell, M. Forward-looking assimilation of MODIS-derived snow-covered area into a land surface model. J. Hydrometeorol. 2009, 10, 130–148. [Google Scholar] [CrossRef]
- Rodell, M.; Houser, P.R. Updating a land surface model with MODIS-derived snow cover. J. Hydrometeorol. 2004, 5, 1064–1075. [Google Scholar] [CrossRef]
- Liu, Y.; Peters-Lidard, C.D.; Kumar, S.; Foster, J.L.; Shaw, M.; Tian, Y.; Fall, G.M. Assimilating satellite-based snow depth and snow cover products for improving snow predictions in Alaska. Adv. Water Resour. 2013, 54, 208–227. [Google Scholar] [CrossRef]
- Fletcher, S.J.; Liston, G.E.; Hiemstra, C.A.; Miller, S.D. Assimilating MODIS and AMSR-E snow observations in a snow evolution model. J. Hydrometeorol. 2012, 13, 1475–1492. [Google Scholar] [CrossRef]
- Kumar, S.V.; Reichle, R.H.; Peters-Lidard, C.D.; Koster, R.D.; Zhan, X.W.; Crow, W.T.; Eylander, J.B.; Houser, P.R. A land surface data assimilation framework using the land information system: Description and applications. Adv. Water Resour. 2008, 31, 1419–1432. [Google Scholar] [CrossRef]
- De Lannoy, G.J.M.; Reichle, R.H.; Arsenault, K.R.; Houser, P.R.; Kumar, S.; Verhoest, N.E.C.; Pauwels, V.R.N. Multiscale assimilation of Advanced Microwave Scanning Radiometer-EOS snow water equivalent and Moderate Resolution Imaging Spectroradiometer snow cover fraction observations in northern Colorado. Water Resour. Res. 2012, 48. [Google Scholar] [CrossRef] [Green Version]
- Andreadis, K.M.; Lettenmaier, D.P. Assimilating remotely sensed snow observations into a macroscale hydrology model. Adv. Water Resour. 2006, 29, 872–886. [Google Scholar]
- Su, H.; Yang, Z.-L.; Niu, G.-Y.; Dickinson, R.E. Enhancing the estimation of continental-scale snow water equivalent by assimilating MODIS snow cover with the ensemble kalman filter. J. Geophys. Res. 2008, 113. [Google Scholar] [CrossRef]
- Slater, A.G.; Clark, M.P. Snow data assimilation via an ensemble Kalman filter. J. Hydrometeorol. 2006, 7, 478–493. [Google Scholar] [CrossRef]
- Zhang, Y.F.; Hoar, T.J.; Yang, Z.L.; Anderson, J.L.; Toure, A.M.; Rodell, M. Assimilation of MODIS snow cover through the data assimilation research testbed and the community land model version 4. J. Geophys. Res. Atmos. 2014, 119, 7091–7103. [Google Scholar]
- Assimilating MODIS-Based Albedo and Snow Cover Fraction into the Common Land Model to Improve Snow Depth Simulation with Direct Insertion and Deterministic Ensemble Kalman Filter Methods. Available online: http://www.readcube.com/articles/10.1002/2014JD022012 (accessed on 27 September 2014).
- Kolberg, S.; Rue, H.; Gottschalk, L. A bayesian spatial assimilation scheme for snow coverage observations in a gridded snow model. Hydrol. Earth Syst. Sci. 2006, 10, 369–381. [Google Scholar] [CrossRef] [Green Version]
- Leisenring, M.; Moradkhani, H. Snow water equivalent prediction using bayesian data assimilation methods. Stoch. Environ. Res. Risk Assess. 2010, 25, 253–270. [Google Scholar] [CrossRef]
- Thirel, G.; Salamon, P.; Burek, P.; Kalas, M. Assimilation of MODIS snow cover area data in a distributed hydrological model using the particle filter. Remote Sens. 2013, 5, 5825–5850. [Google Scholar] [CrossRef]
- Clark, M.P.; Slater, A.G.; Barrett, A.P.; Hay, L.E.; McCabe, G.J.; Rajagopalan, B.; Leavesley, G.H. Assimilation of snow covered area information into hydrologic and land-surface models. Adv. Water Resour. 2006, 29, 1209–1221. [Google Scholar] [CrossRef]
- Impacts of Snow Cover Fraction Data Assimilation on Modeled Energy and Moisture Budgets. Available online: http://www.prhouser.com/houser_files/jgrd50542.pdf (accessed on 27 July 2013).
- Forman, B.A.; Reichle, R.H.; Rodell, M. Assimilation of terrestrial water storage from grace in a snow-dominated basin. Water Resour. Res. 2012, 48. [Google Scholar] [CrossRef]
- Che, T.; Li, X.; Jin, R.; Huang, C. Assimilating passive microwave remote sensing data into a land surface model to improve the estimation of snow depth. Remote Sens. Environ. 2014, 143, 54–63. [Google Scholar] [CrossRef]
- Hamill, T.M.; Snyder, C. A hybrid ensemble kalman filter-3D variational analysis scheme. Mon. Weather Rev. 2000, 128, 2905–2919. [Google Scholar] [CrossRef]
- Lorenc, A.C. The potential of the ensemble Kalman filter for NWP—A comparison with 4D-Var. Q. J. Roy. Meteor. Soc. 2003, 129, 3183–3203. [Google Scholar] [CrossRef]
- Wang, X.; Barker, D.M.; Snyder, C.; Hamill, T.M. A hybrid ETKF–3DVAR data assimilation scheme for the WRF model. Part I: Observing System Simulation Experiment. Mon. Weather Rev. 2008, 136, 5116–5131. [Google Scholar] [CrossRef]
- Buehner, M.; Houtekamer, P.L.; Charette, C.; Mitchell, H.L.; He, B. Intercomparison of variational data assimilation and the ensemble Kalman filter for global deterministic NWP. Part I: Description and single-observation experiments. Mon. Weather Rev. 2010, 138, 1550–1566. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, F. E4DVAR: Coupling an ensemble Kalman filter with four-dimensional variational data assimilation in a limited-area weather prediction model. Mon. Weather Rev. 2012, 140, 587–600. [Google Scholar] [CrossRef]
- Wang, X.; Barker, D.M.; Snyder, C.; Hamill, T.M. A hybrid ETKF–3DVAR data assimilation scheme for the WRF model. . Part II: Real observation experiments. Mon. Weather Rev. 2008, 136, 5132–5147. [Google Scholar] [CrossRef]
- Wang, X.; Parrish, D.; Kleist, D.; Whitaker, J. GSI 3DVar-based ensemble–variational hybrid data assimilation for ncep global forecast system: Single-resolution experiments. Mon. Weather Rev. 2013, 141, 4098–4117. [Google Scholar] [CrossRef]
- Buehner, M.; Houtekamer, P.L.; Charette, C.; Mitchell, H.L.; He, B. Intercomparison of variational data assimilation and the ensemble Kalman filter for global deterministic NWP. Part II: One-month experiments with real observations. Mon. Weather Rev. 2010, 138, 1567–1586. [Google Scholar] [CrossRef]
- Zhang, F.; Zhang, M.; Poterjoy, J. E3DVAR: Coupling an ensemble kalman filter with three-dimensional variational data assimilation in a limited-area weather prediction model and comparison to E4DVar. Mon. Weather Rev. 2013, 141, 900–917. [Google Scholar] [CrossRef]
- Wang, X. Incorporating ensemble covariance in the gridpoint statistical interpolation variational minimization: A mathematical framework. Mon. Weather Rev. 2010, 138, 2990–2995. [Google Scholar] [CrossRef]
- Schwartz, C.S.; Liu, Z. Convection-permitting forecasts initialized with continuously cycling limited-area 3DVar, ensemble Kalman filter, and “hybrid” variational-ensemble data assimilation systems. Mon. Weather Rev. 2014, 142, 716–738. [Google Scholar] [CrossRef]
- Evensen, G. The ensemble Kalman filter: Theoretical formulation and practical implementation. Ocean Dynam. 2003, 53, 343–367. [Google Scholar] [CrossRef]
- Whitaker, J.S.; Hamill, T.M. Ensemble data assimilation without perturbed observations. Mon. Weather Rev. 2002, 130, 1913–1924. [Google Scholar] [CrossRef]
- A Deterministic Formulation of the Ensemble Kalman Filter: An Alternative to Ensemble Square Root Filters. Available online: http://www.cmar.csiro.au/staff/oke/pubs/Sakov_and_Oke_2008a.pdf (accessed on 10 September 2014).
- Sun, A.Y.; Morris, A.; Mohanty, S. Comparison of deterministic ensemble kalman filters for assimilating hydrogeological data. Adv. Water Resour. 2009, 32, 280–292. [Google Scholar] [CrossRef]
- Dai, Y.J.; Zeng, X.B.; Dickinson, R.E.; Baker, I.; Bonan, G.B.; Bosilovich, M.G.; Denning, A.S.; Dirmeyer, P.A.; Houser, P.R.; Niu, G.Y.; et al. The common land model. B. Am. Meteorol. Soc. 2003, 84, 1013–1023. [Google Scholar] [CrossRef]
- A Land Surface Model (LSM Version 1.0) for Ecological, Hydrological, and Atmospheric Studies: Technical Description and User’s Guide. Available online: http://opensky.library.ucar.edu/collections/TECH-NOTE-000-000-000-229 (accessed on 1 September 2014).
- Biosphere-Atmosphere Transfer Scheme (BATS) Version le as Coupled to the Ncar Community Climate Model. Available online: http://opensky.library.ucar.edu/collections/TECH-NOTE-000-000-000-198 (accessed on 1 September 2014).
- Dai, Y.; Zeng, Q. A land surface model (IAP94) for climate studies part I: Formulation and validation in off-line experiments. Adv. Atmos. Sci. 1997, 14, 433–460. [Google Scholar] [CrossRef]
- Common Land Model (CLM): Technical Documentation and User’s Guide. Available online: http://igwmc.mines.edu/short-course/ParFlow/clm_user_guide.pdf (accessed on 1 September 2014).
- Courtier, P.; Thépaut, J.N.; Hollingsworth, A. A strategy for operational implementation of 4D-Var, using an incremental approach. Q. J. Roy. Meteorol. Soc. 1994, 120, 1367–1387. [Google Scholar] [CrossRef]
- Zhang, F.Q.; Snyder, C.; Sun, J.Z. Impacts of initial estimate and observation availability on convective-scale data assimilation with an ensemble Kalman filter. Mon. Weather Rev. 2004, 132, 1238–1253. [Google Scholar] [CrossRef]
- Bowler, N.E.; Flowerdew, J.; Pring, S.R. Tests of different flavours of EnKF on a simple model. Q. J. Roy. Meteorol. Soc. 2013, 139, 1505–1519. [Google Scholar] [CrossRef]
- Wang, X.; Snyder, C.; Hamill, T.M. On the theoretical equivalence of differently proposed ensemble-3DVar hybrid analysis schemes. Mon. Weather Rev. 2007, 135, 222–227. [Google Scholar] [CrossRef]
- Parrish, D.F.; Derber, J.C. The national meteorological center’s spectral statistical-interpolation analysis system. Mon. Weather Rev. 1992, 120, 1747–1763. [Google Scholar] [CrossRef]
- Chen, F.; Crow, W.T.; Starks, P.J.; Moriasi, D.N. Improving hydrologic predictions of a catchment model via assimilation of surface soil moisture. Adv. Water Resour. 2011, 34, 526–536. [Google Scholar] [CrossRef]
- Huang, X.; Liang, T.; Zhang, X.; Guo, Z. Validation of MODIS snow cover products using landsat and ground measurements during the 2001–2005 snow seasons over northern Xinjiang, China. Int. J. Remote Sens. 2011, 32, 133–152. [Google Scholar] [CrossRef]
- MODIS/Terra Snow Cover Daily L3 Global 500 m SIN Grid V005. Available online: http://nsidc.org/data/docs/daac/MODIS_v5/mod10a1_MODIS_terra_snow_daily_global_500m_grid.gd.html (accessed on 8 October 2014).
- Salomonson, V.V.; Appel, I. Estimating fractional snow cover from MODIS using the normalized difference snow index. Remote Sens. Environ. 2004, 89, 351–360. [Google Scholar] [CrossRef]
- Notarnicola, C.; Duguay, M.; Moelg, N.; Schellenberger, T.; Tetzlaff, A.; Monsorno, R.; Costa, A.; Steurer, C.; Zebisch, M. Snow cover maps from MODIS images at 250 m resolution, part 2: Validation. Remote Sens. 2013, 5, 1568–1587. [Google Scholar] [CrossRef]
- AMSR-E/Aqua L3 Global Snow Water Equivalent EASE-Grids, Version 2. Available online: http://nsidc.org/data/docs/daac/ae_swe_ease-grids.gd.html (accessed on 10 September 2014).
- Assessment of the NASA AMSR-E SWE Product. Available online: http://ieeexplore.ieee.org/xpl/login.jsp?tp=&arnumber=5416328&url=http%3A%2F%2Fieeexplore.ieee.org%2Fxpls%2Fabs_all.jsp%3Farnumber%3D5416328 (accessed on 18 February 2010).
- Reichle, R.H.; Koster, R.D.; Liu, P.; Mahanama, S.P.P.; Njoku, E.G.; Owe, M. Comparison and assimilation of global soil moisture retrievals from the Advanced Microwave Scanning Radiometer for the Earth Observing System (AMSR-E) and the Scanning Multichannel Microwave Radiometer (SMMR). J. Geophys. Res. 2007, 112. [Google Scholar] [CrossRef]
- An Observation-Based Formulation of Snow Cover Fraction and Its Evaluation over Large North American River Basins. Available online: http://onlinelibrary.wiley.com/doi/10.1029/2007JD008674/full (accessed on 16 November 2007).
- Tedesco, M.; Kim, E.J.; England, A.W.; De Roo, R.D.; Hardy, J.P. Brightness temperatures of snow melting/refreezing cycles: Observations and modeling using a multilayer dense medium theory-based model. Geosci. Remote Sens. 2006, 44, 3563–3573. [Google Scholar] [CrossRef]
- Hall, D.K.; Riggs, G.A. Accuracy assessment of the MODIS snow products. Hydrol. Process. 2007, 21, 1534–1547. [Google Scholar] [CrossRef]
- Scipal, K.; Holmes, T.; de Jeu, R.; Naeimi, V.; Wagner, W. A possible solution for the problem of estimating the error structure of global soil moisture data sets. Geophys. Res. Letters 2008, 35. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Shu, H.; Dong, L. DEnKF–Variational Hybrid Snow Cover Fraction Data Assimilation for Improving Snow Simulations with the Common Land Model. Remote Sens. 2014, 6, 10612-10635. https://doi.org/10.3390/rs61110612
Xu J, Shu H, Dong L. DEnKF–Variational Hybrid Snow Cover Fraction Data Assimilation for Improving Snow Simulations with the Common Land Model. Remote Sensing. 2014; 6(11):10612-10635. https://doi.org/10.3390/rs61110612
Chicago/Turabian StyleXu, Jianhui, Hong Shu, and Lin Dong. 2014. "DEnKF–Variational Hybrid Snow Cover Fraction Data Assimilation for Improving Snow Simulations with the Common Land Model" Remote Sensing 6, no. 11: 10612-10635. https://doi.org/10.3390/rs61110612