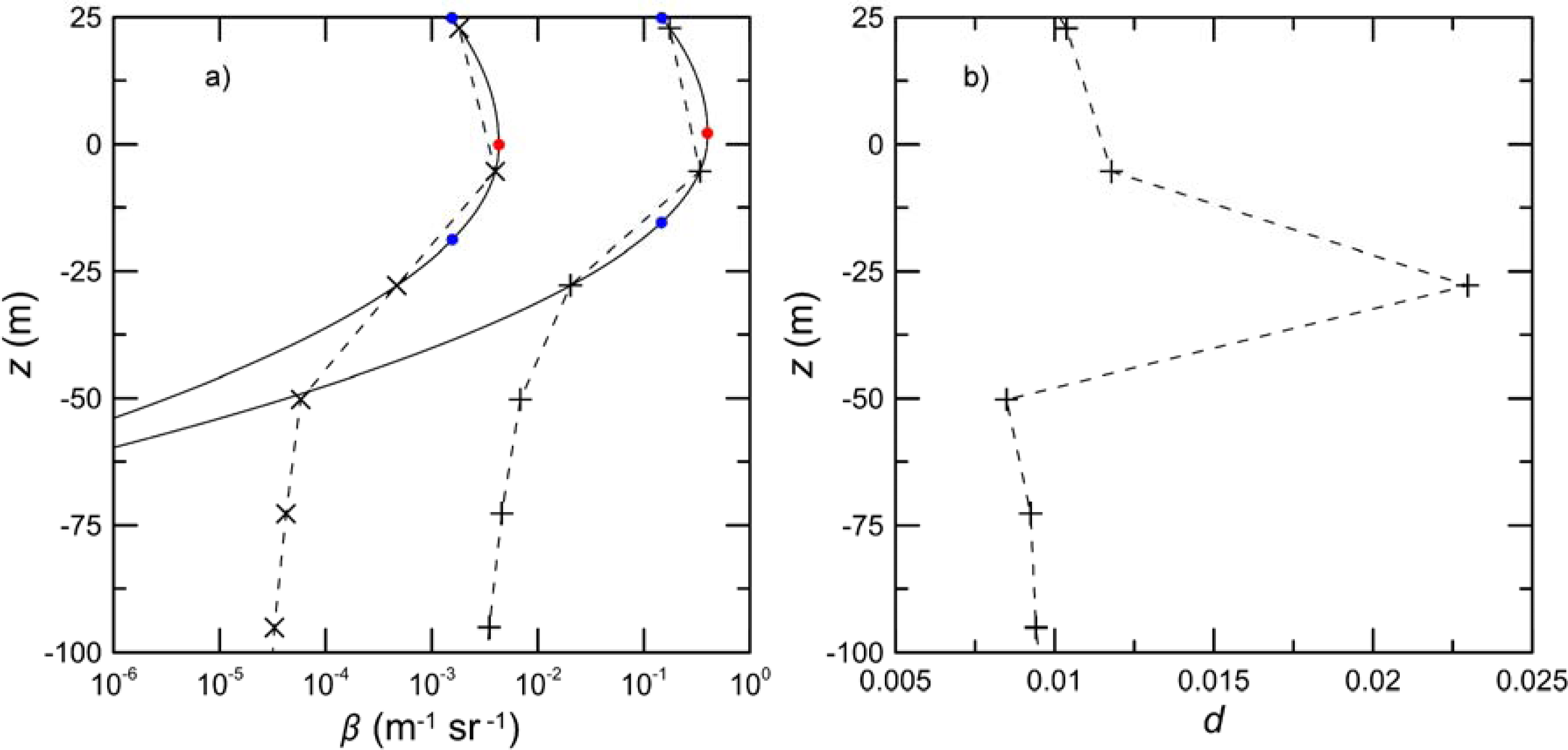
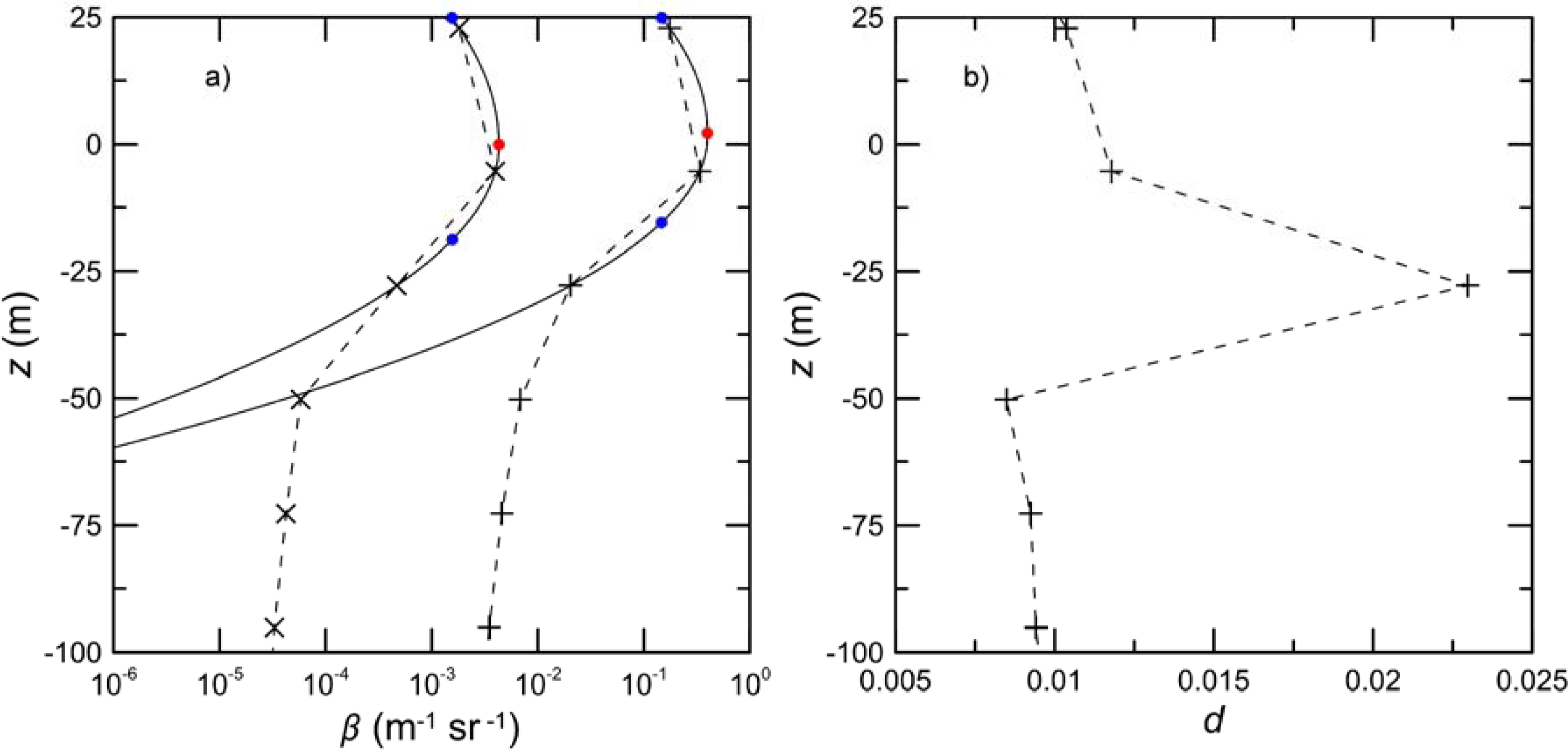
A typical profile (
Figure 1a) shows the delay and broadening of the cross-polarized return relative to the total return as described in the introduction. This example was averaged over 100 lidar shots to show the general features without noise. The standard deviations of the 100 values at each depth were around 20% of the corresponding means for the total return and almost 100% for the cross-polarized return. Much of this variability is probably a result of surface roughness variations, but a detailed investigation is beyond the scope of this paper. The amplitude,
AT, of the Gaussian fit to the total surface return peaks at 2.2 m above the surface, while the amplitude,
AX, of the fit to the cross-polarized return peaks at 0.2 m below the surface, so Δ
R = 2.4 ± 0.2 m. The width,
WT, of the total return is 22.8 m, while the width of the cross-polarized return,
WX, is 24.8 m, so Δ
W = 2.0 ± 0.4 m. The variability in the single-shot parameter values is also large, but the resulting uncertainties in average Δ
R and Δ
W for this example are 9% and 18%, respectively. The depolarization of the same averaged profile (
Figure 1b) shows a maximum in the depolarization at a depth of 28 m. This is consistent with subsurface scattering. This figure also shows the effects of the relatively slow transient response of the photomultiplier tubes for both channels.
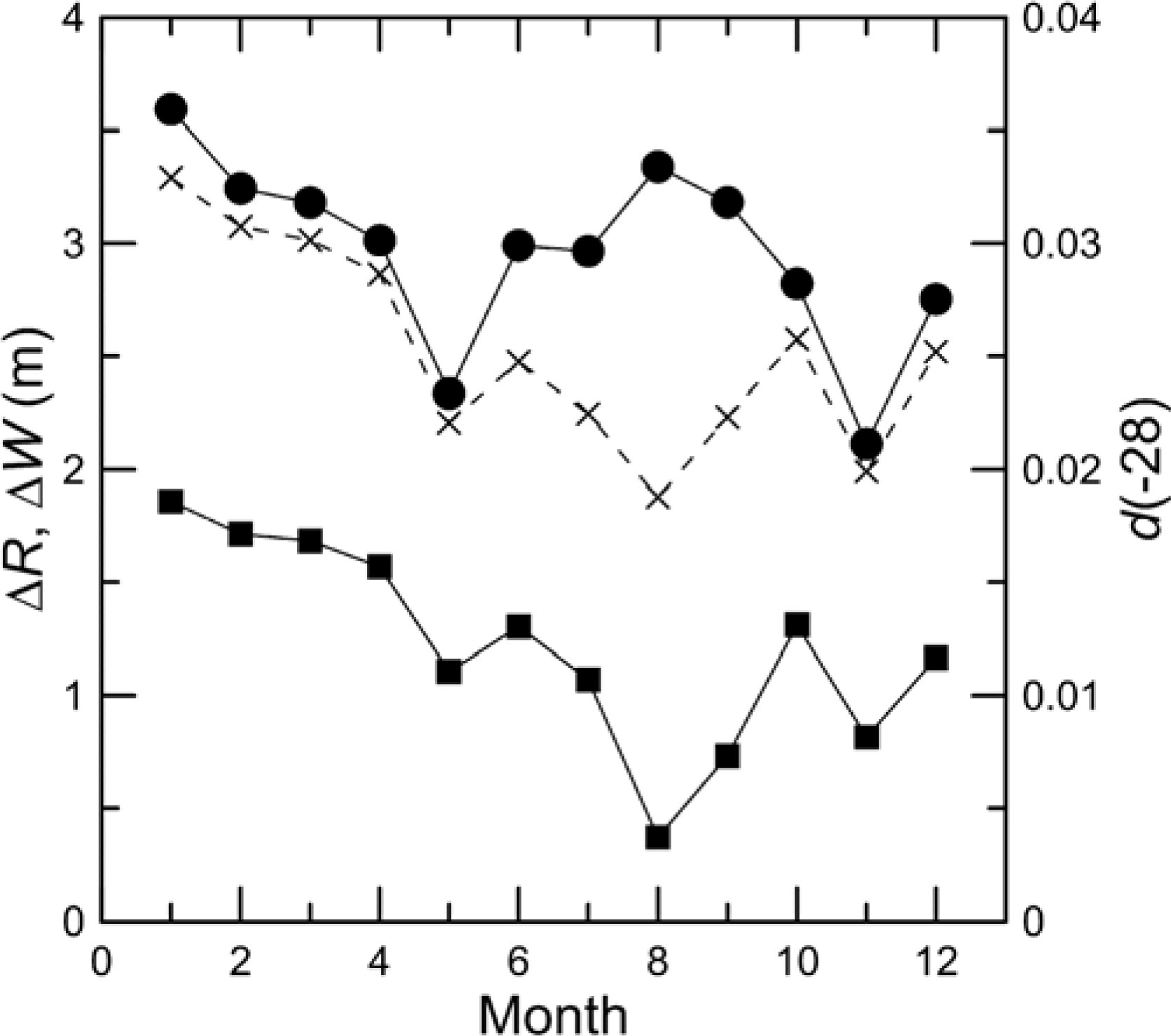
For all months of 2010, the global averages (60°S to 60°N) of both Δ
R and Δ
W (
Figure 2) were significantly greater than zero. The number of lidar shots contributing to those monthly averages ranged from 0.4 million in August to 1.6 million in March. Despite the shot-to-shot variability, the large number of shots in each average resulted in a standard deviation of each average that was less than 0.01 of the corresponding average value, and the averages were all significantly greater than zero. The subsurface depolarization is also shown in
Figure 2. The figure shows that the range difference, Δ
R, was always significantly greater than the increase in width, Δ
W. It is interesting that Δ
R and Δ
W track each other fairly well except for July, August, and September. In these months, data from the southern hemisphere were relatively sparse, and this may have been a factor. The northern hemisphere in these months has large regions with high chlorophyll concentration near the surface. In all months, however, the global average depolarization at 28 m depth tracks the increase in width.
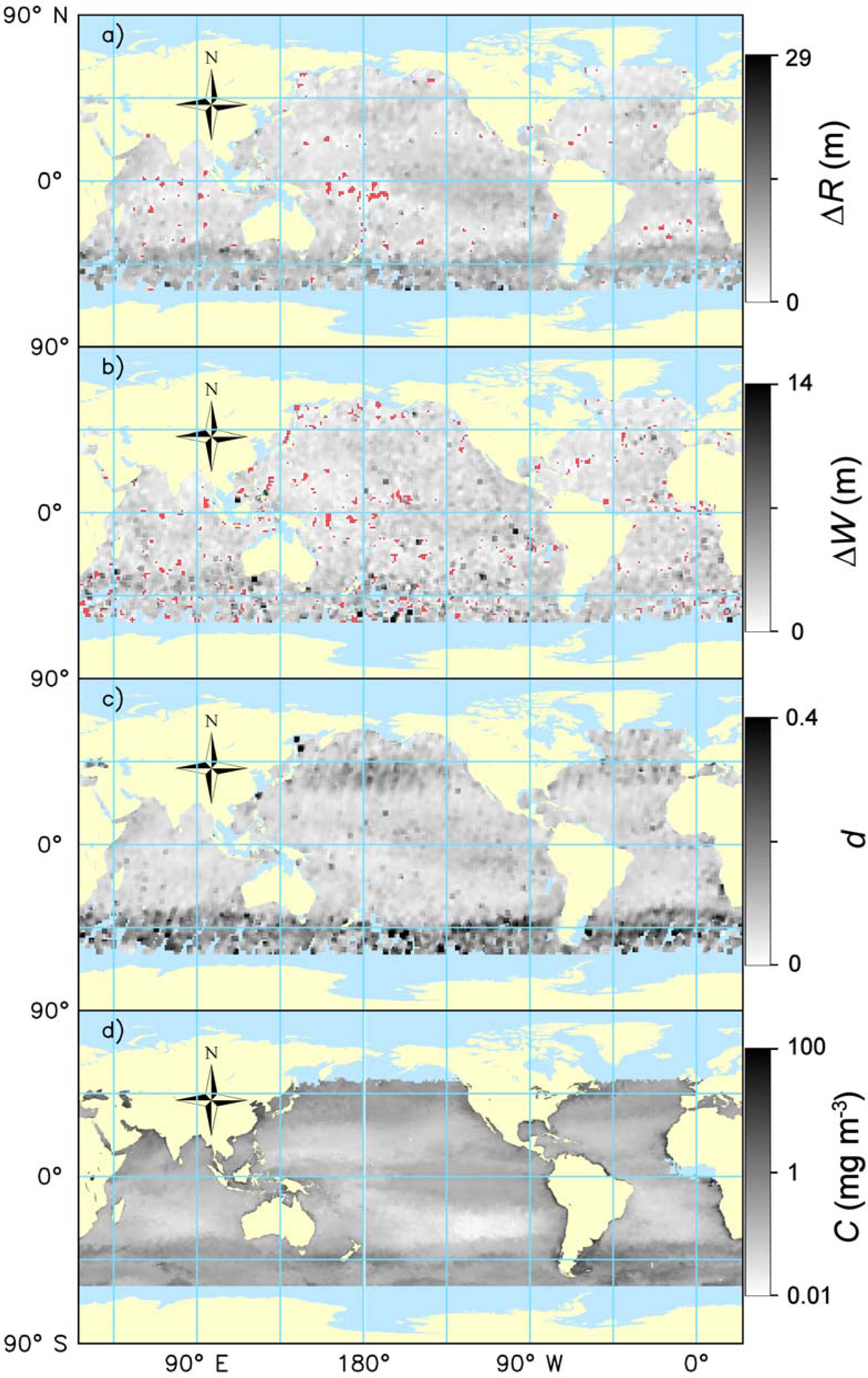
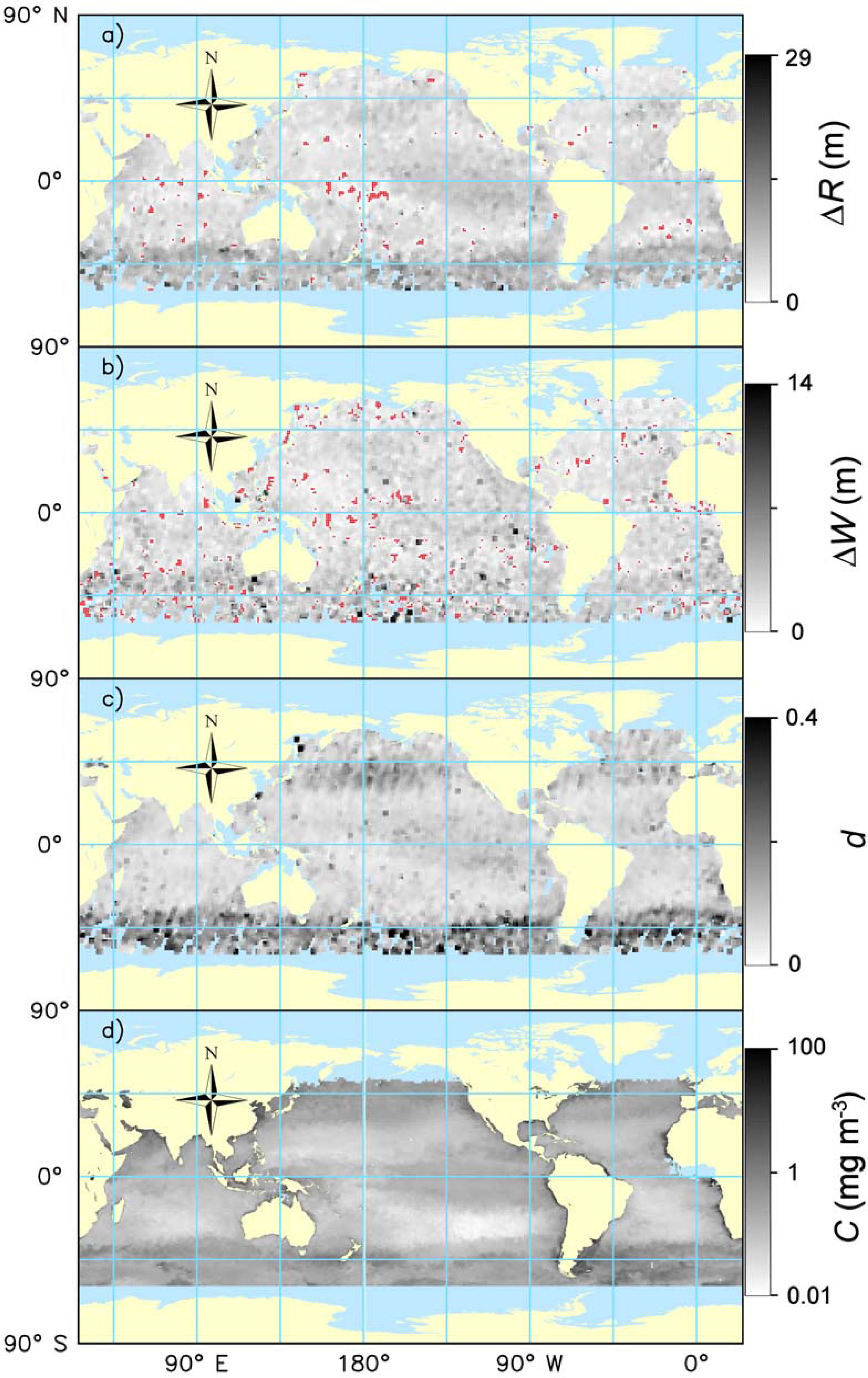
We were also interested in the spatial distribution of the three lidar parameters, Δ
R, Δ
W, and
d(−28). The example of January (
Figure 3) presents the parameters after averaging with a 3° filter to make the patterns more visible. There is a rough correspondence between the global patterns of all three of the fitted CALIOP parameters and surface-chlorophyll concentration derived from MODIS data. The highest chlorophyll concentration in January is below 40°S, and this region clearly shows higher values of all three lidar parameters. A region of high chlorophyll above 30°N is clearly seen in the depolarization, is less visible in the range difference, and even less visible in the width difference. The equatorial upwelling zones, which appear as regions of increased chlorophyll concentration, are also seen in the depolarization and range difference, but not it the width difference. There is also a correspondence on smaller scales. Note, for example, the region of higher chlorophyll in the northwest Indian Ocean that is matched by increased range difference and increased depolarization.
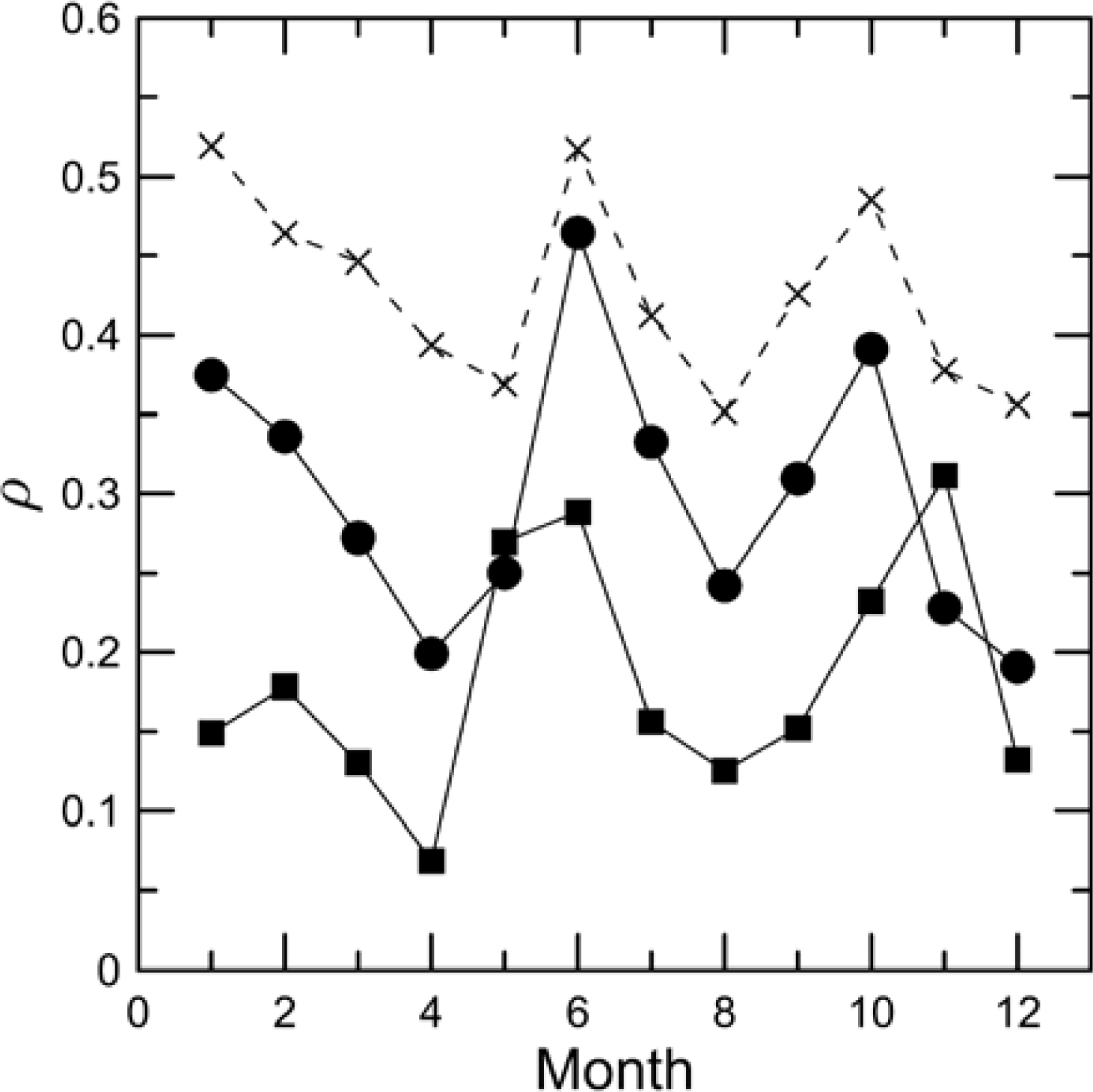
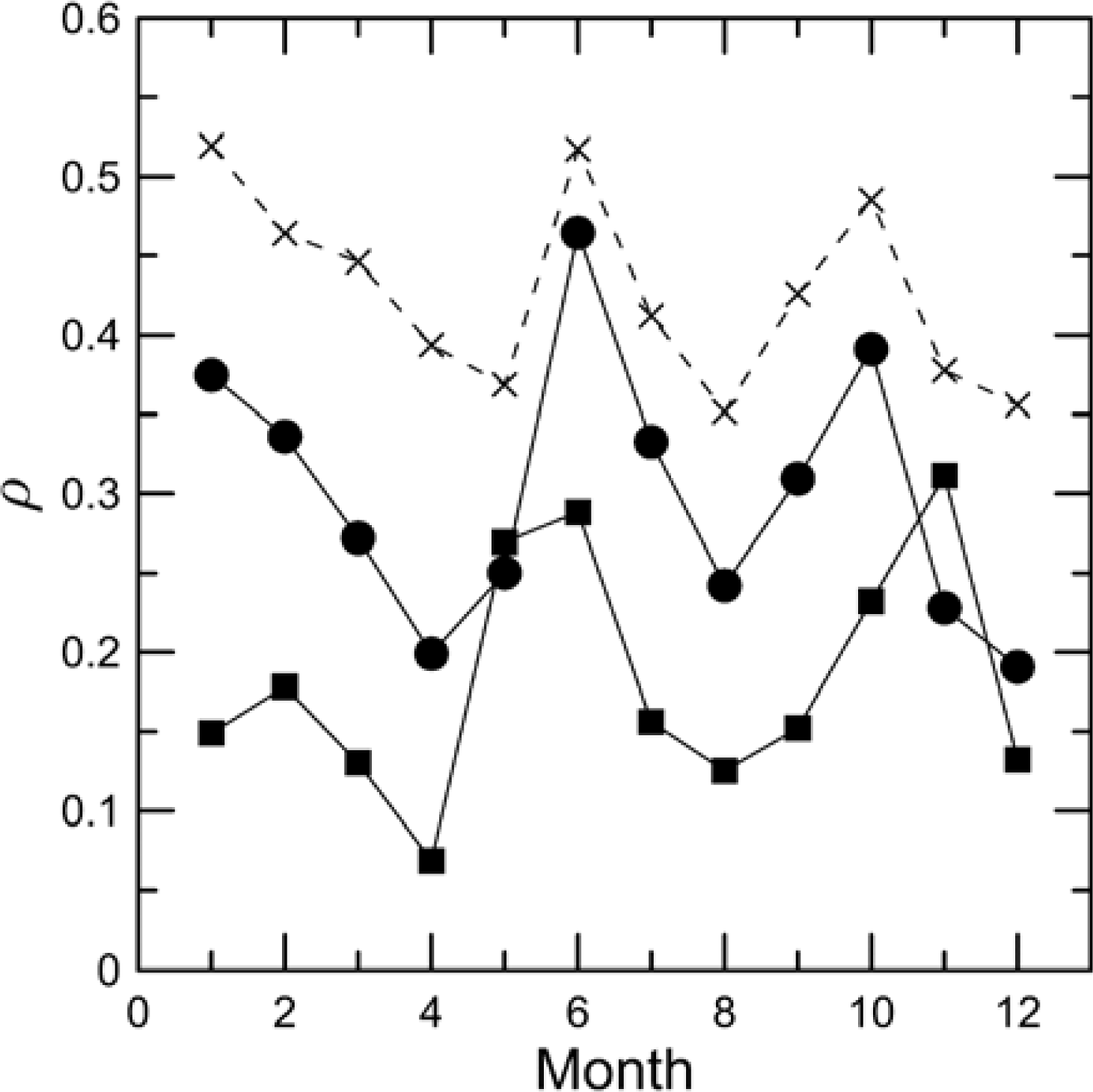
The correlations between monthly averages of all three of the lidar parameters and chlorophyll concentration (
Figure 4) are all significant, with statistical
p-values < 10
−6. The number of data pairs in each of these correlations varies between 6,500 (August) and 19,000 (March), with an average of 11,000. These correlations suggest that phytoplankton might be an important component of the subsurface returns. In restricting the analysis to deep-ocean CALIOP data, we expect that most, although not all, of the data would be from Case 1 waters where the optical properties, including depolarized backscatter, are largely determined by phytoplankton. Bubbles may be present, but would be concentrated near the surface and would not significantly depolarize the lidar return. Concentrations of suspended sediments are generally low away from the coasts. Zooplankton are likely to be present where there are phytoplankton, and these could contribute to the observed correlations. However, we would expect concentrations of zooplankton to be lower than the phytoplankton on which they feed. Particulate organic matter (POM) is also likely to be present where there are phytoplankton, and this could also contribute to the observed correlations. The success of ocean color measurements in measuring chlorophyll concentration in Case 1 waters would suggest that, even if POM is a significant source of backscatter, it can be used to infer chlorophyll.
On the other hand, the correlations are generally <0.5, so the lidar parameters are not completely determined by the near-surface chlorophyll concentration inferred from MODIS. Part of this difference may be related to differences in phytoplankton populations. The depolarization from a phytoplankton cell depends on its size and shape in ways that are unrelated to its chlorophyll content. Part may be related to non-uniform depth distributions of phytoplankton. The presence of subsurface layers will affect remote-sensing reflectance and cross-polarized lidar return differently.
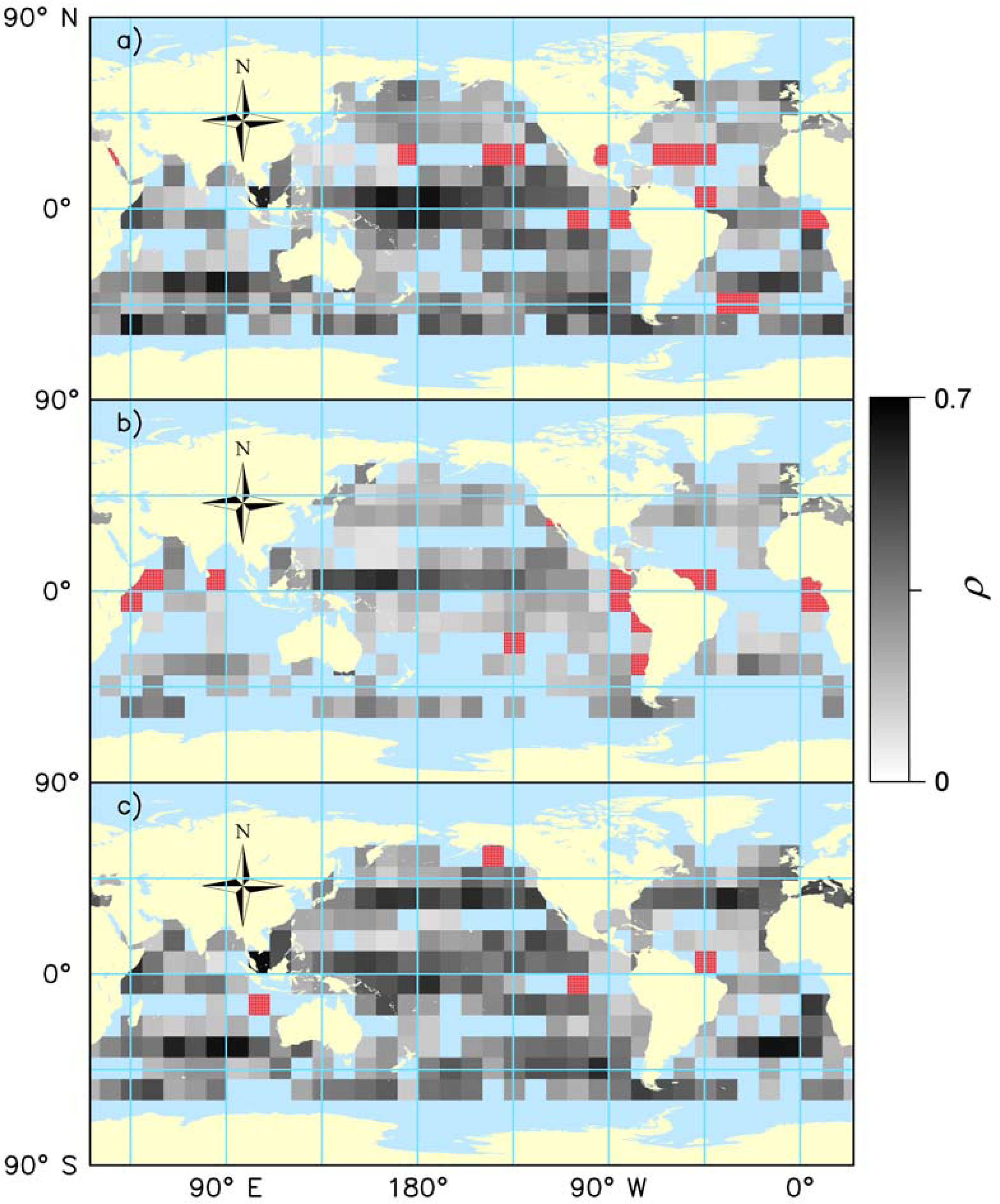
The spatial distribution of these correlations (
Figure 5) was calculated using sets of 10° by 10° by 12 month data. There are fewer data pairs used for each correlation in this analysis, ranging from 17 to 905 with an average of 420. The general features of these maps are consistent with the global averages. The depolarization has the highest correlations, with an average of 0.31, and the fewest regions with no significant correlation. Conversely, the width has the most regions with no significant correlation and the lowest average correlation at 0.20. A detailed analysis of the regional differences is beyond the scope of this paper, but there some interesting features. One region that deserves further study is the western tropical Pacific, which has relatively high correlation values. Another is the region from 0°–10°N and 40°–50°W, where all three of the lidar parameters are negatively correlated with chlorophyll concentration and which includes the mouth of the Amazon River. This is consistent with our argument that subsurface returns would not be detectable in waters with high attenuation like the Amazon River plume. Precise determination of how much attenuation could be accommodated is difficult, however, since detection also depends on the level of surface reflection, the amount of subsurface scattering, and the depolarization introduced by that scattering.
3.1. Atmospheric Interference
While the correlations between the lidar parameters and chlorophyll concentration suggest that subsurface scattering is present in the lidar return in addition to the specular surface reflection, it was necessary to rule out the possibility of interference by atmospheric aerosols. That is, depolarization by forward scattering in the atmosphere coupled with a correlation between chlorophyll concentration and AOD might produce correlations between depolarization and chlorophyll concentration that are not representative of subsurface scattering. Note that the question is of depolarization by narrow-angle forward scattering in the atmosphere before or after reflection from the sea surface. This is different from the issue of depolarization by backscattering from non-spherical aerosols, since the return from aerosol backscattering does not contribute to the subsurface signal.
For the small aerosol optical depths used in the analysis, this depolarization can be estimated assuming a single aerosol scattering event. This means that we will consider those photons that are scattered in the forward direction by an aerosol particle and specularly reflected from the sea surface back to the receiver or are specularly reflected from the sea surface and then scattered back to the receiver by an aerosol particle. From symmetry arguments, we can evaluate the aerosol-surface case and use the same result for the surface-aerosol case.
Consider a linearly-polarized beam scattered by an aerosol particle. The scattered field can be expressed in terms of the incident field by the matrix expression,
where
Es is the scattered field vector,
k is the optical wavenumber,
r is the distance to the observation plane,
Q is the rotation matrix between the initial plane of polarization and the scattering plane, and
S is the scattering matrix. For linearly polarized light, we can let
For scattering at an azimuthal angle of
φ with respect to the plane of polarization
The scattering matrix for a large, spherical aerosol particle is given by
where the scattering amplitudes,
S1 and
S2, depend on the characteristics of the particle and on the scattering angle. The off-diagonal elements in the scattering matrix are zero for spherical aerosols when the plane of polarization and the scattering plane coincide, and this is the reason for the rotation matrices in
Equation (3). The initial coordinate system is rotated into one in which the polarization and scattering planes coincide, the scattering matrix is applied, and then the inverse rotation matrix restores the original coordinate system.
For a distribution of large, spherical aerosol particles, we can assume that
S2 =
S1cos(
θ), where
θ is the scattering angle. We will also let cos(
θ) = 1 −
δ. Because of the receiver field of view (130 μrad),
δ will generally be small, but this condition is not required in the following development. Averaging over all azimuthal scattering angles, the cross-polarized irradiance can be expressed as
The scattered irradiance in the co-polarization is
The depolarization of the scattered light is
where the angle brackets denote the average over all scattering angles within the field of view of the lidar and over height. We will approximate the field of view by denoting a maximum
δ given by
where
z is altitude, and the value of 47 m was obtained from the product of the field of view half angle (65 μrad) and the average satellite altitude (720 km). While this maximum value goes to unity at the surface, it is less than 0.1 for
z > 100 m.
To illustrate, we can approximate the distribution of scattering angles by the Henyey-Greenstein function [
23]
where the asymmetry parameter
g is the average value of cos(
θ) at the optical wavelength of interest. Winter and Chýlek [
24] calculated a value for sea-salt aerosol of
g = 0.75. Fiebig and Ogren [
25] reported values for
g that were generally between 0.58 and 0.64 at one coastal monitoring site and between 0.62 and 0.67 at another. Andrews
et al. [
26] reported values between 0.59 and 0.72 for “wet” aerosols in Oklahoma. Moorthy
et al. [
27] reported values between 0.58 and 0.7 over the Indian Ocean. These are not exhaustive, but suggest that the value will generally be somewhere between 0.6 and 0.75 over the ocean.
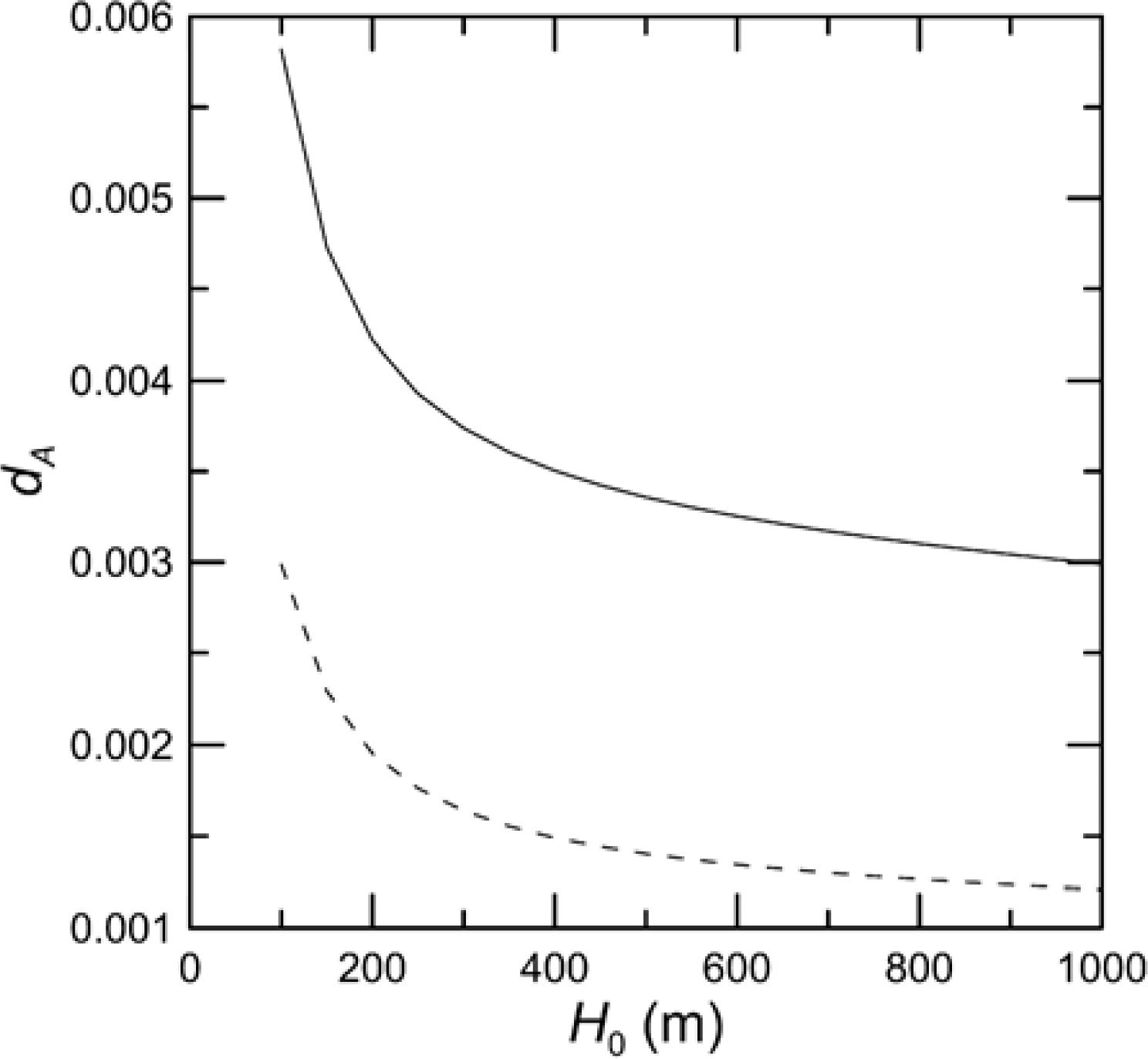
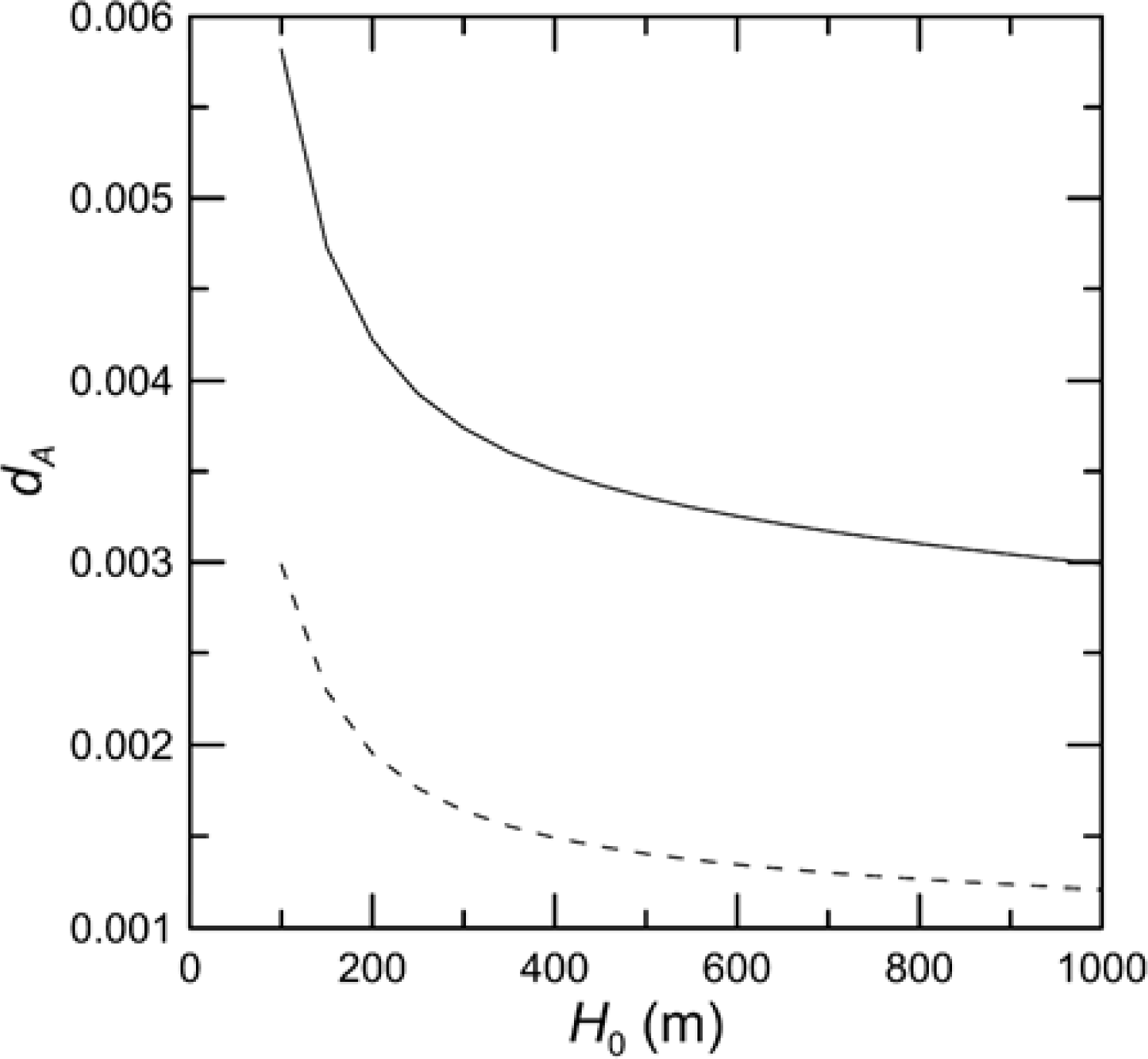
As a first approximation, we will assume that the aerosols are distributed uniformly in height from the surface to some height
H0.
Figure 6 presents the depolarization for the expected range of
g. We conclude that
dA is not very sensitive to the vertical distribution of aerosols for heights above 200 m, and that it will almost certainly be less than 0.005 under realistic conditions. Note that this is the depolarization of the scattered light. The aerosol optical depth of the data selected is clustered around 0.05, so only about 10% of the light backscattered from the ocean is also scattered by aerosols during the round trip path through the atmosphere. The actual measured depolarization would then be about a factor of ten less than that of the scattered light, or less than 5 × 10
−4. The average value of the measured depolarization values in the monthly one-degree bins, on the other hand, was 0.036 and only 1.8% of the values were less than ten times the maximum estimated aerosol-induced depolarization. Aerosol scattering, then, does not contribute significantly to the cross-polarized return from the CALIOP data used in this analysis.
As a further check, we recalculated the correlations using only cases with very low winds (<5 m·s−1) and very clear atmospheric conditions (AOD < 0.025). This reduced the number of data pairs in each of the correlation calculations drastically, with the average dropping from 11,000 in the full data set to 2000 in the reduce data set. The correlations between chlorophyll concentration and the three lidar parameters are reduced as a result, but the reductions are relatively small. For d, the change was ρ = 0.43 ± 0.06 to 0.32 ± 0.08 for the average, ± the standard deviation of the 12 monthly values. For ΔR, the change was ρ = 0.30 ± 0.08 to 0.26 ± 0.07 and for ΔW, it was ρ = 0.18 ± 0.08 to 0.13 ± 0.09.
3.2. Receiver Limitations
One limit on the depth to which the CALIOP signal may be attributed to subsurface scattering is the ability to distinguish it from the tail of the impulse response of the photomultipliers used in the 532 nm receivers, and is evident in
Figure 1a. The impulse response of each receiver was carefully measured from orbit for both polarizations using land-surface returns collected in 2006 and 2007 [
28], and these impulse response functions can be approximated by:
for the total and cross-polarized channels, respectively. Note that
z is negative below the surface as in
Figure 1a. These functions include both a Gaussian approximation to the effects of the Bessel filter and the exponentially-decaying contribution from signal-induced fluorescence in the photomultipliers [
29]. The photomultiplier decay depth of over 100 m is slower than the attenuation of the lidar return in even the clearest waters, since the round-trip attenuation depth would be only about 10 m for pure sea water, which has an attenuation coefficient of 0.05 m
−1 at the lidar wavelength. Thus, the temporal response of the photomultiplier will dominate the return at large depths.
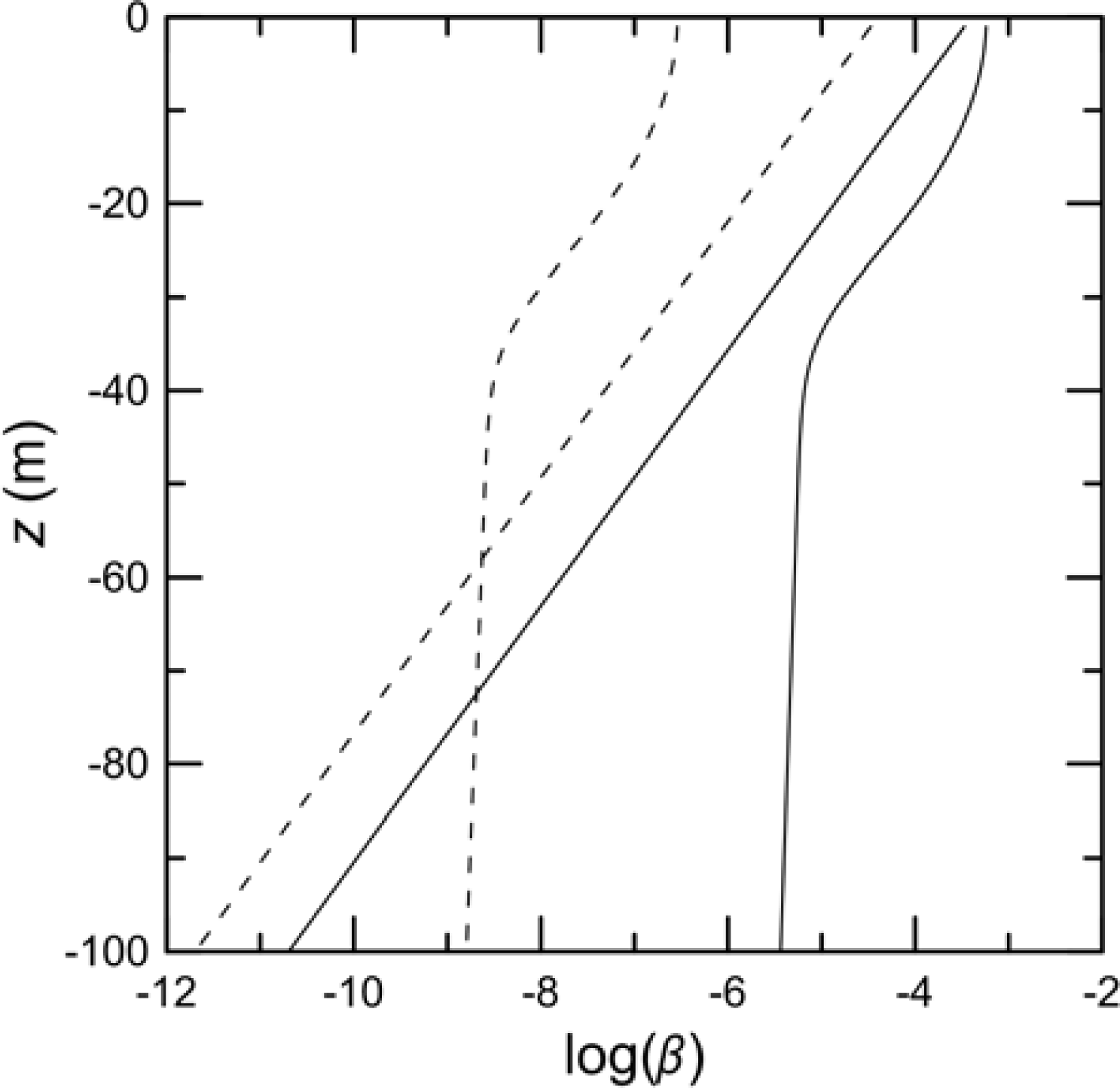
To investigate the limits imposed on depth penetration by the transient response, we considered the following scenario. The attenuated backscatter from the water column from an ideal detector was taken to be
where the water volume backscatter coefficient and attenuation are the average of reported values for pure sea water and clear ocean from the Petzold measurements [
30]. The attenuation was calculated from absorption and backscatter using the Lee formula [
31,
32] for diffuse attenuation coefficient. The corresponding cross-polarized return,
βWX, was taken to be 10% of the total return based on clear-ocean measurements with an airborne lidar [
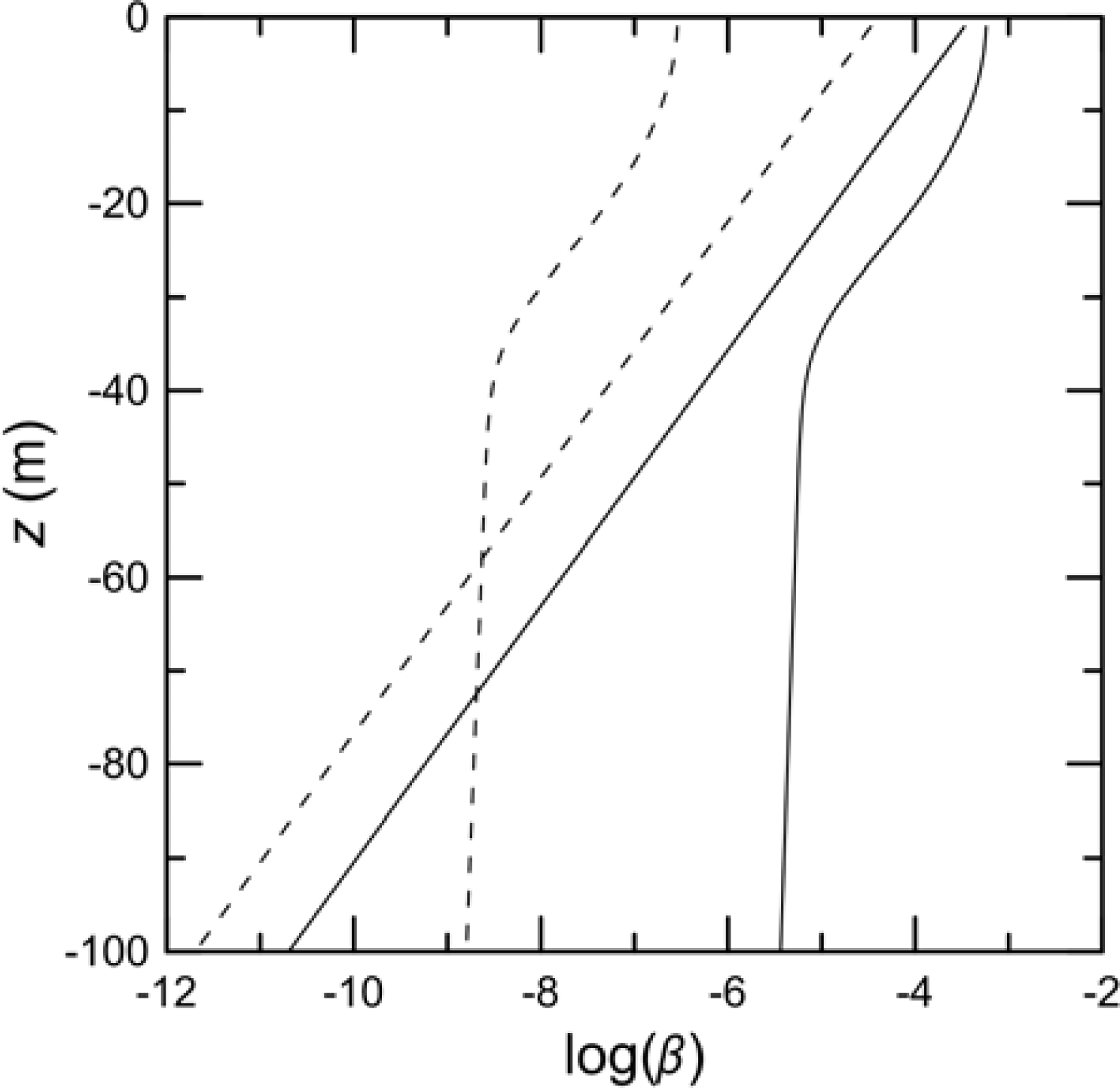
19]. The depth profile of the total surface return was taken as
where
γ is the integrated surface reflection coefficient from Ref. [
15]. Note that there is an error in [
15]. The expression for
γ in
Eqution (3) of that paper is too large by a factor of two. In the example (
Figure 7), a wind speed of 10 m·s
−1 was used. For the cross-polarized component,
βSX, we note that the surface return is a specular reflection that does not create depolarization. This implies that the cross-polarized surface reflection is the result of specular reflection of light that is depolarized by atmospheric aerosols. For this, we assumed a depolarization of 5 × 10
−4 as discussed in Section 3.1.
The water volume returns for ideal detectors and surface returns for the CALIOP detectors are plotted for this case in
Figure 7 with the assumption of an ideal receiver with unlimited range resolution. The surface reflection is greater than the volume scattering at all depths for the total return. Enough subsurface scattering to be greater than the surface reflection would require a volume backscattering coefficient typical of very turbid waters. Very turbid waters also have a high attenuation, and only the subsurface scattering very close to the surface could contribute. This would be indistinguishable from the specular surface reflection, so there is no information about subsurface scattering in the total channel. The situation for the cross-polarized return is very different. Here the subsurface scattering is greater than the surface return from the surface to a depth of 58 m. This is fairly robust. This depth decreases, but only to 54 m, if we make conditions much less favorable by halving wind speed, doubling surface depolarization, halving water volume depolarization, or halving water volume backscatter coefficient.
Another way of looking at this issue is to compare the total depth-integrated subsurface return with the surface reflection. For uniform water properties, the total depth-integrated subsurface return is given by
where
Ψ is the scattering phase function at a scattering angle of π radians,
b is the scattering coefficient, and
KD, the diffuse attenuation coefficient, describes the attenuation of the lidar signal for the CALIOP geometry [
32]. For the purposes of comparison, we will use simple models based on chlorophyll concentration [
33]. At 530 nm, we have
and
We can separate the scattering coefficient into sea water and particulate contributions and apply the appropriate phase-function values from Petzold [
30] to get
To get the corresponding cross-polarized signal, we will assume a constant depolarization of 0.1.
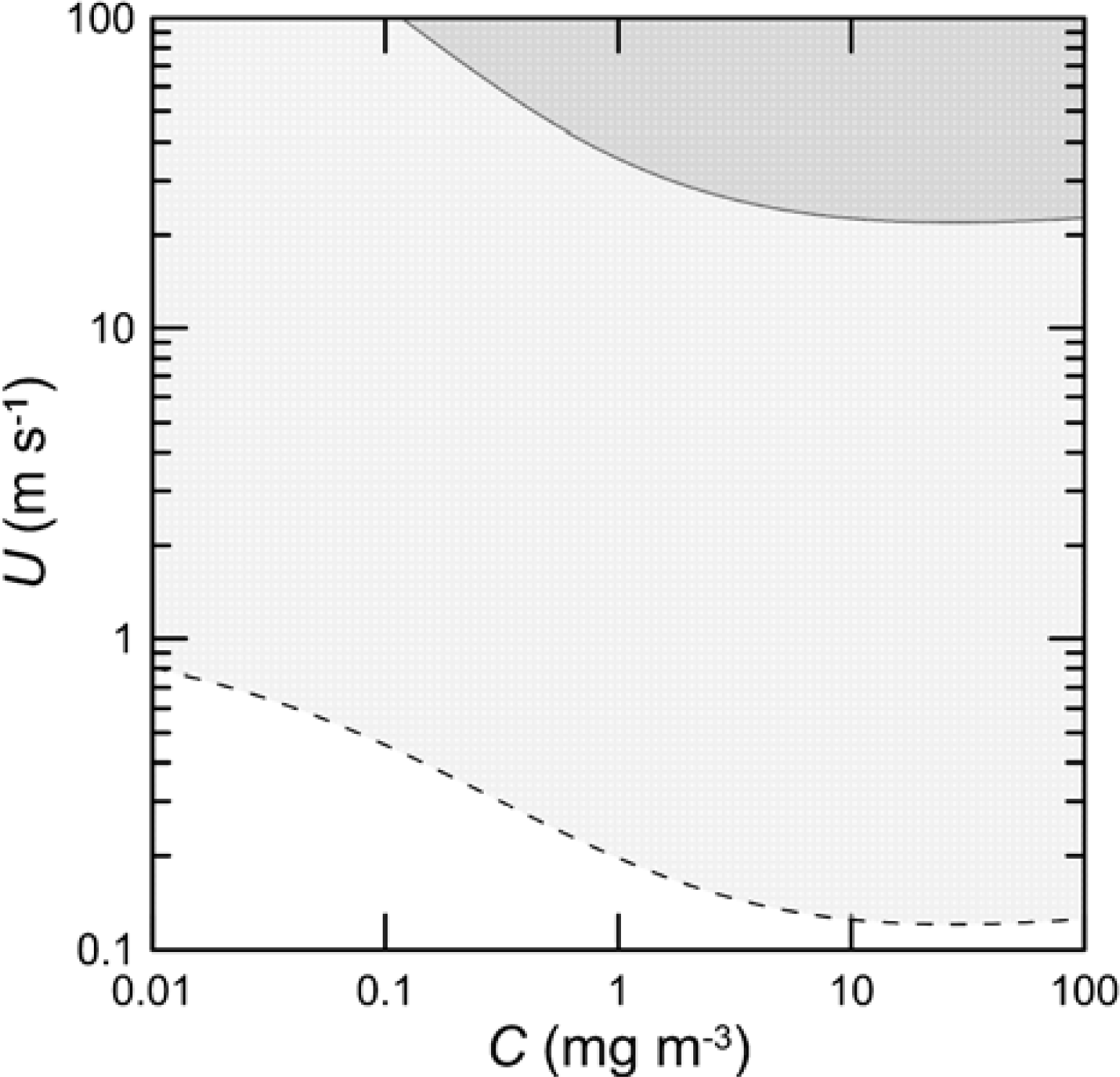
The relationship between the integrated surface reflection and wind from [
15] can be inverted to obtain the wind speed at which the surface and subsurface returns would be equal. At wind speeds above this value, we would expect to see a significant return from below the surface. At lower wind speeds, we would not.
Figure 8 shows these regimes for the total and cross-polarized signals, assuming a surface depolarization of 0.005. This figure clearly shows that, under most ocean conditions, the total return from the lidar will be dominated by the surface reflection and the cross-polarized return will be dominated by subsurface scattering.
3.3. Examples
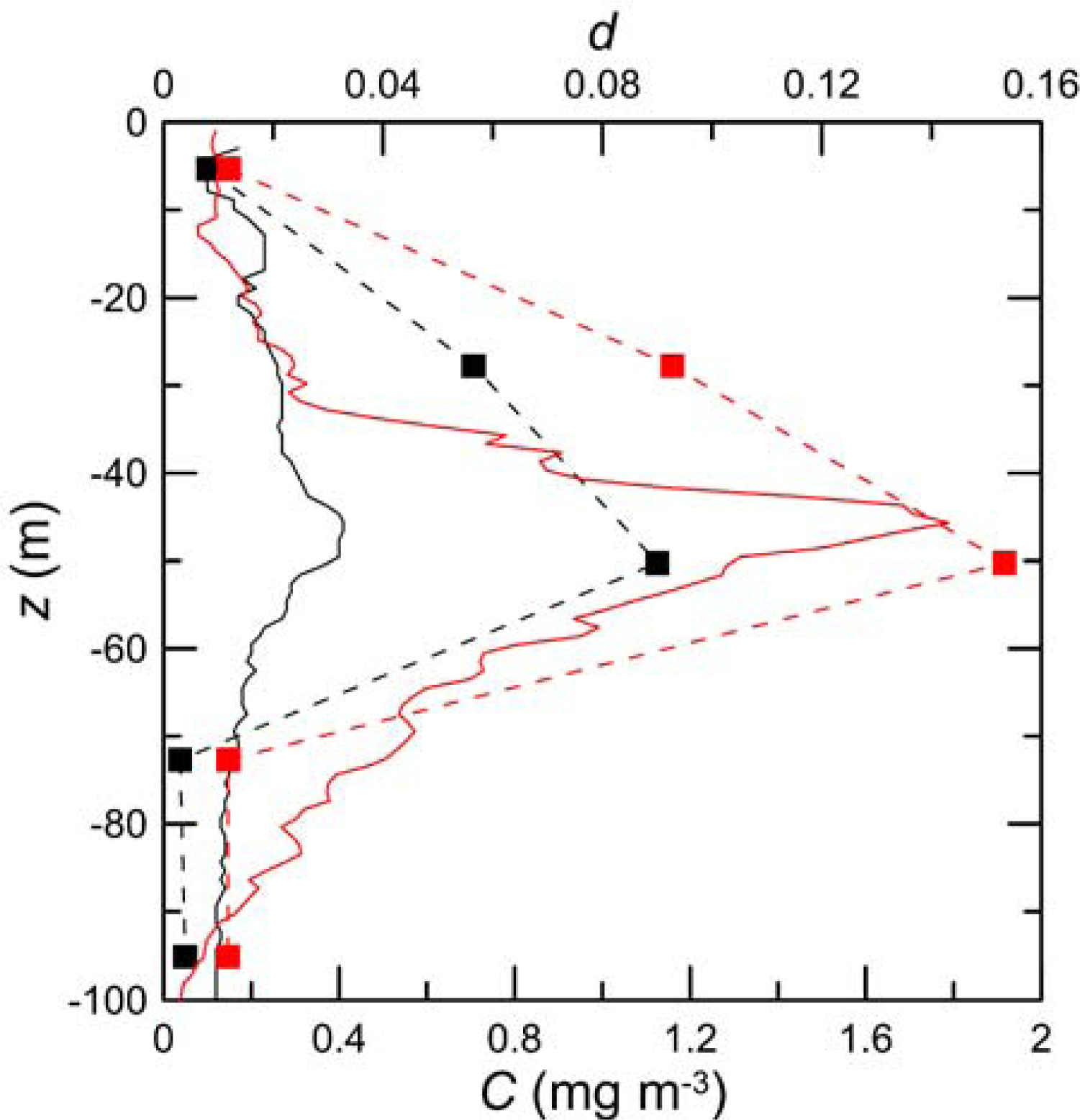
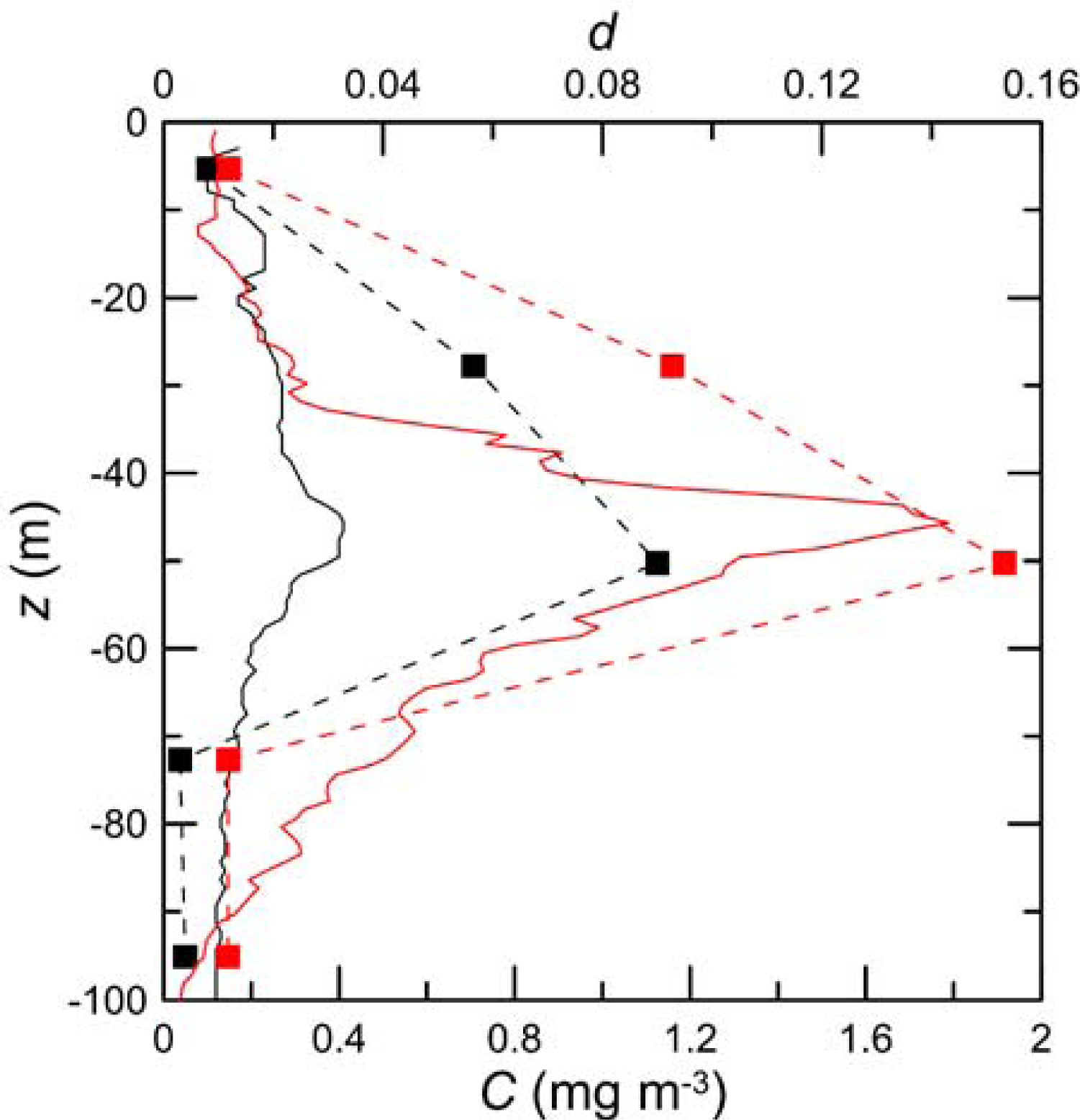
As an example of detection of subsurface scattering layers with CALIOP, we looked for single-shot lidar profiles that, in addition to our other selection criteria, had a depolarization greater than 0.1 at the depth of 50 m. At the lidar depth bin above this, a peak in depolarization can result from the delay and spreading of the near-surface return and does not necessarily imply a peak in scattering. At the depth bin below, the lidar returns can be contaminated by the photomultiplier response. This suggests that the 50 m depth bin is the one most likely to show a clear signature of a subsurface scattering layer. Therefore, we selected two of lidar profiles that were near hydrographic stations reported in the World Ocean Database [
34] which included profiles of chlorophyll inferred from fluorescence measurements. The first profile (
Figure 9) was taken on 15 July 2010 in the Pacific Ocean 275 km off the coast of California (35.553°N, 124.740°W) on the R/V
Point Sur by the US Navy Postgraduate School. The second profile was taken on 28 May 2010 in the Atlantic Ocean 150 km off the coast of Delaware (38.562°N, 73.207°W) on the R/V
Delaware II by the Woods Hole Oceanographic Institution under the Ecosystem Monitoring Program (ECOMON). In both cases, there is a maximum in the chlorophyll concentration between 40 and 50 m in depth, which roughly corresponds to the peak in the depolarization. It is interesting that the layer with higher chlorophyll concentration produced more depolarization, but techniques for quantitative retrieval of chlorophyll concentration have yet to be developed.
These examples also provide some insight into the water clarity required to detect layers at depths near 50 m. For the example in the Pacific, the average chlorophyll concentration in the top 30 m was 0.17 mg·m
−3. The integrated two-way transmission to this depth, using
Equation (17) to estimate the attenuation coefficient at each depth, was 0.019. The example in the Atlantic had an average chlorophyll concentration in the top 30 m of 0.19 mg·m
−3 and a two-way transmission of 0.017.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}