1. Introduction
The modeling of Earth’s gravity field is an essential task in the physical geodesy, and the constructed gravity information can be used for the fields of soild geophysics, oceanography, geodesy, and glaciology [
1]. Beginning in the year 2000, several dedicated satellite gravimetry missions, such as the CHAllenging Minisatellite Payload (CHAMP), Gravity Recovery And Climate Experiment (GRACE), and Gravity field and steady-state Ocean Circulation Explorer (GOCE), have significantly improved the accuracy of the static gravity field and its temporal variations by several orders of magnitude [
2,
3,
4]. Although these missions were carried out with different measurement principles, they had a common feature: all were equipped with global positioning system (GPS) receivers to realize the concept known as satellite-to-satellite tracking in high-low mode (SST-hl). SST-hl is a highly sophisticated technique to map the long-wavelength spectrum of the gravity field [
5,
6,
7].
There are four methods for gravity field recovery that use SST-hl observations: celestial mechanics, energy balance, short-arc, and acceleration methods [
8]. According to the types of differentiated acceleration, two acceleration methods exist: the average acceleration method and point-wise acceleration method [
9]. Baur et al. [
8] and Pail et al. [
10] compared the different methods for modeling gravity field models with the GOCE SST-hl data and pointed out that, with the exception of the energy balance method, the other three methods had a comparable performance. The celestial mechanics approach is confronted with a large computational effort due to the integration of the variation equations and a nonlinear system of equations; in the case of the energy balance method, space gravity spectroscopy information is exclusively scalar and not available in all three directions [
11,
12,
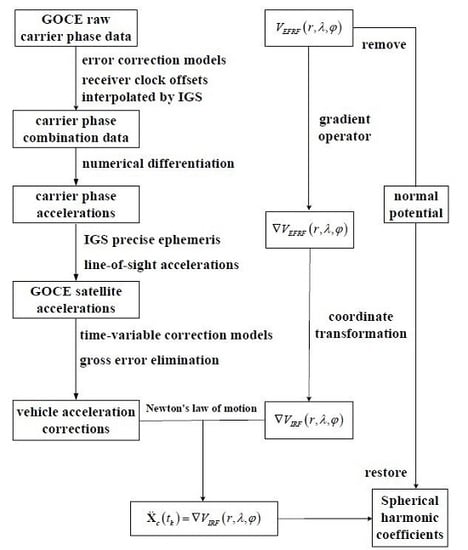
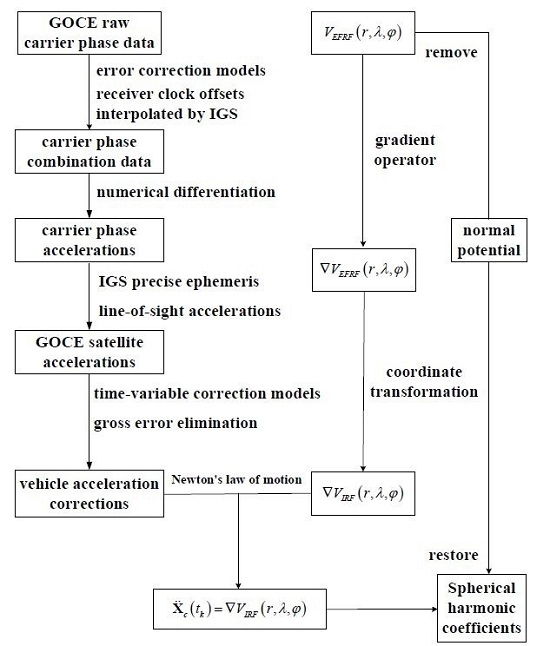
13]. The acceleration method is based on Newton’s equation of motion, which balances the gravitational vector with satellite accelerations in the inertial reference frame [
14,
15]. The principle of acceleration approach is simple and has been successfully applied to CHAMP, GRACE, and GOCE SST-hl data analysis [
14,
15,
16,
17,
18,
19].
The key to recovering the gravity model by the acceleration method is to estimate the satellite accelerations with a high degree of precision. Several approaches have been used to estimate the GPS-based acceleration including orbit differentiation, Doppler differentiation, and carrier phase differentiation approaches [
20]. The most commonly used method is performed by double time-differentiating successive trajectories of the moving satellite, also known as the orbit differentiation algorithm. A major drawback to this method is that the accuracy of the differentiated accelerations is strongly dependent on the position precision; an increase or decrease in the number of visible satellites can lead to discontinuities [
21]. Another method is the Doppler measurement, which can be used afterward to obtain the satellite’s velocity before the satellite accelerations are computed by the first-order derivative of the satellite’s velocity. One shortcoming is that the raw Doppler observables may be heavily contaminated by measurement noises [
22]. An alternative method is to numerically differentiate the GPS carrier phase observations then obtain both the range rate and range acceleration, which is called the carrier phase differentiation method. This method has been successfully applied in airborne gravimetry [
23,
24] and satellite gravimetry [
25]. The most prominent advantage of this approach is the avoidance of the cycle ambiguity problem and the elimination of systematic errors (e.g., hardware delays from the receiver and GPS satellites) that are common to adjacent epochs [
23,
25].
Guo et al. [
25] adopted the average acceleration approach to recover the gravity field model from satellite accelerations derived from onboard GPS phase measurements. It was shown that the noise of the accelerations derived by the carrier phase differentiation method was lower than that derived by the orbit differentiation method in all three components, especially in the cross-track component, which showed an improvement of about 20%. Thus, the recovered gravity field based on the carrier phase differentiation accelerations had a slightly higher accuracy when compared with the solution based on the orbit differentiation method. It should be noted that Guo et al. [
25] estimated the average satellite accelerations in two steps: first, the position differences epoch by epoch were derived directly from the GPS carrier phase measurements; the average satellite accelerations were then obtained with the position differences.
In this study, we proposed to recover the gravity field model based on the point-wise accelerations of the GOCE satellite estimated by the carrier phase differentiation method from the onboard carrier phase observations. This idea has not yet been addressed and differs from the average acceleration approach used for gravity field modeling and the approach of estimating the satellite accelerations in Guo et al. [
25]. The paper is organized as follows.
Section 2 describes the functional models of satellite acceleration and gravity field determination.
Section 3 shows the experimental results.
Section 4 discusses the findings of this research, and
Section 5 presents our conclusions.
4. Discussion
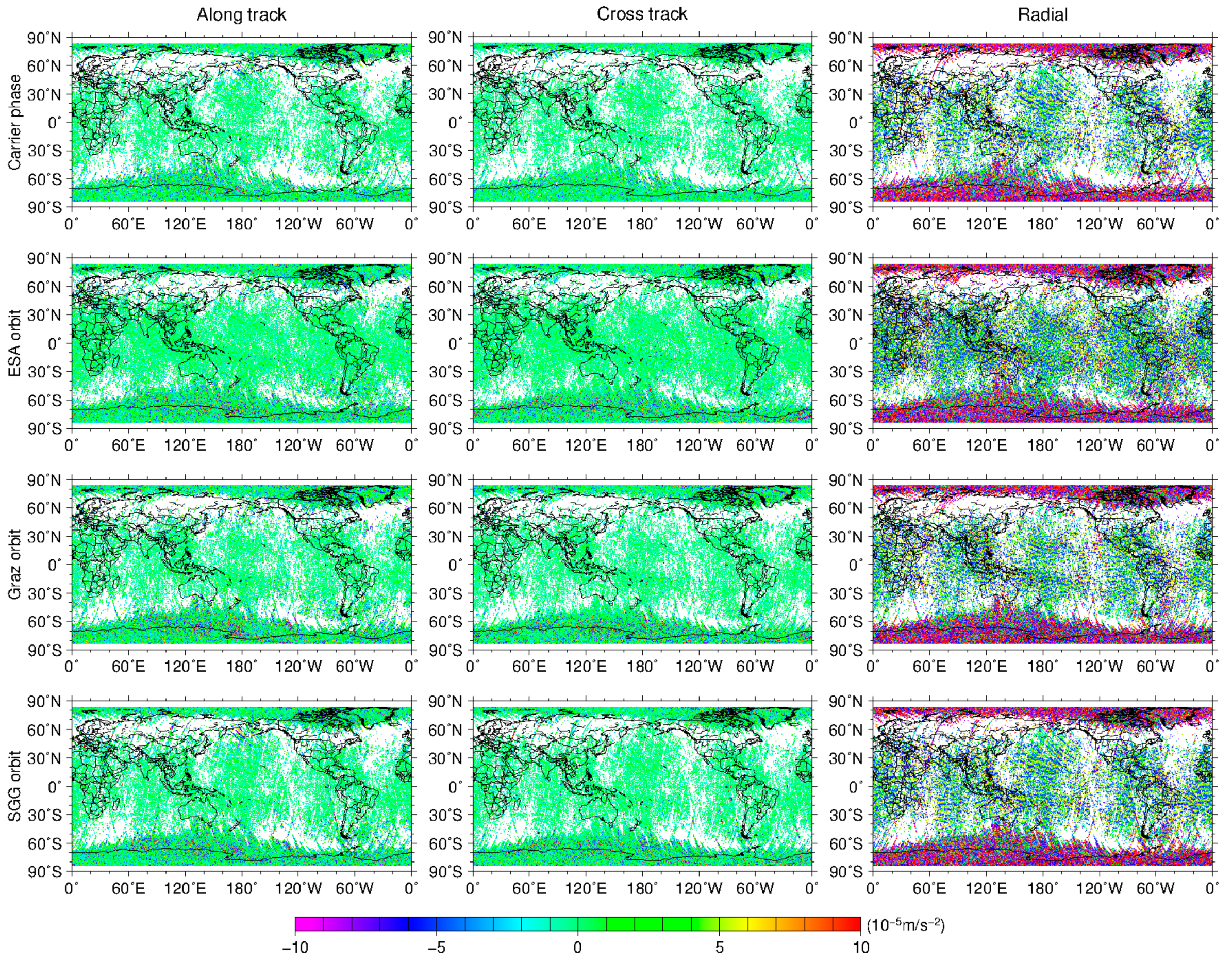
According to
Figure 1 and
Figure 2 as well as
Table 4, the derived radial accelerations were noisier than the other two components. This can be explained by a relatively low accuracy of the GPS positioning in the radial direction, which is caused by the geometric configuration of the satellite constellation [
44,
45,
46]. Additionally, the along-track accelerations performed weaker than the cross-track component, which was caused by an increase or decrease in the number of visible satellites because geometry changes can inevitably degrade the position solution and create large acceleration errors [
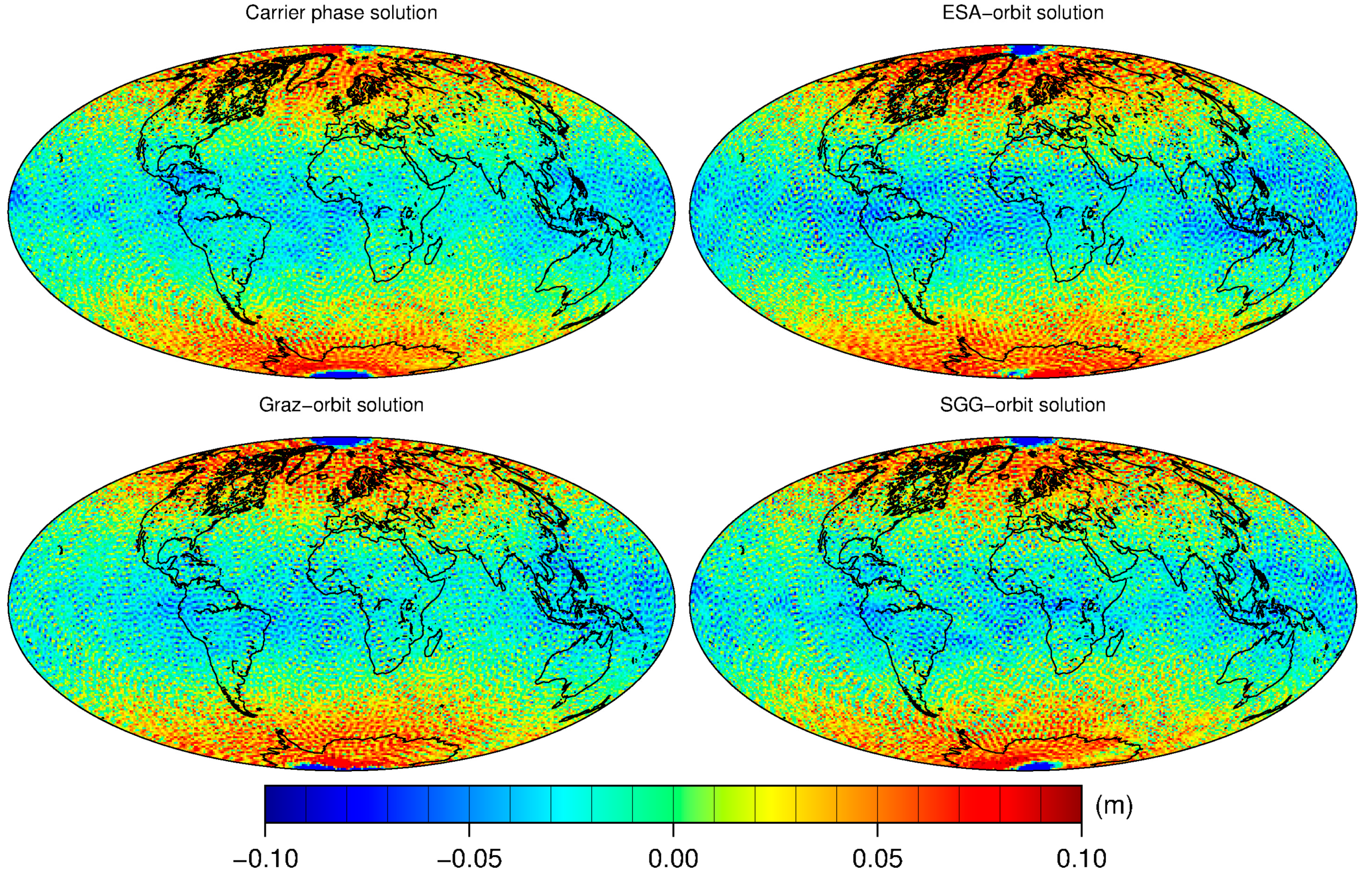
46]. Therefore, stringent position accuracies and poor tolerance of geometry changes are the main drawbacks of the orbit differentiation method. However, the carrier phase differentiation method is more robust because no ambiguity resolution is required. In addition, the distribution of gross errors in
Figure 1 and geoidal errors in
Figure 5 and
Figure 7 were geographically correlated and highly inhomogeneous; large errors were mainly located close to the geomagnetic poles. There are two reasons for this situation: the poor observation geometry in geographical polar region, which is very close to the geomagnetic polar region; and the ionospheric scintillation effects, which cause short-period irregular changes in the phase and amplitude of signal [
44].
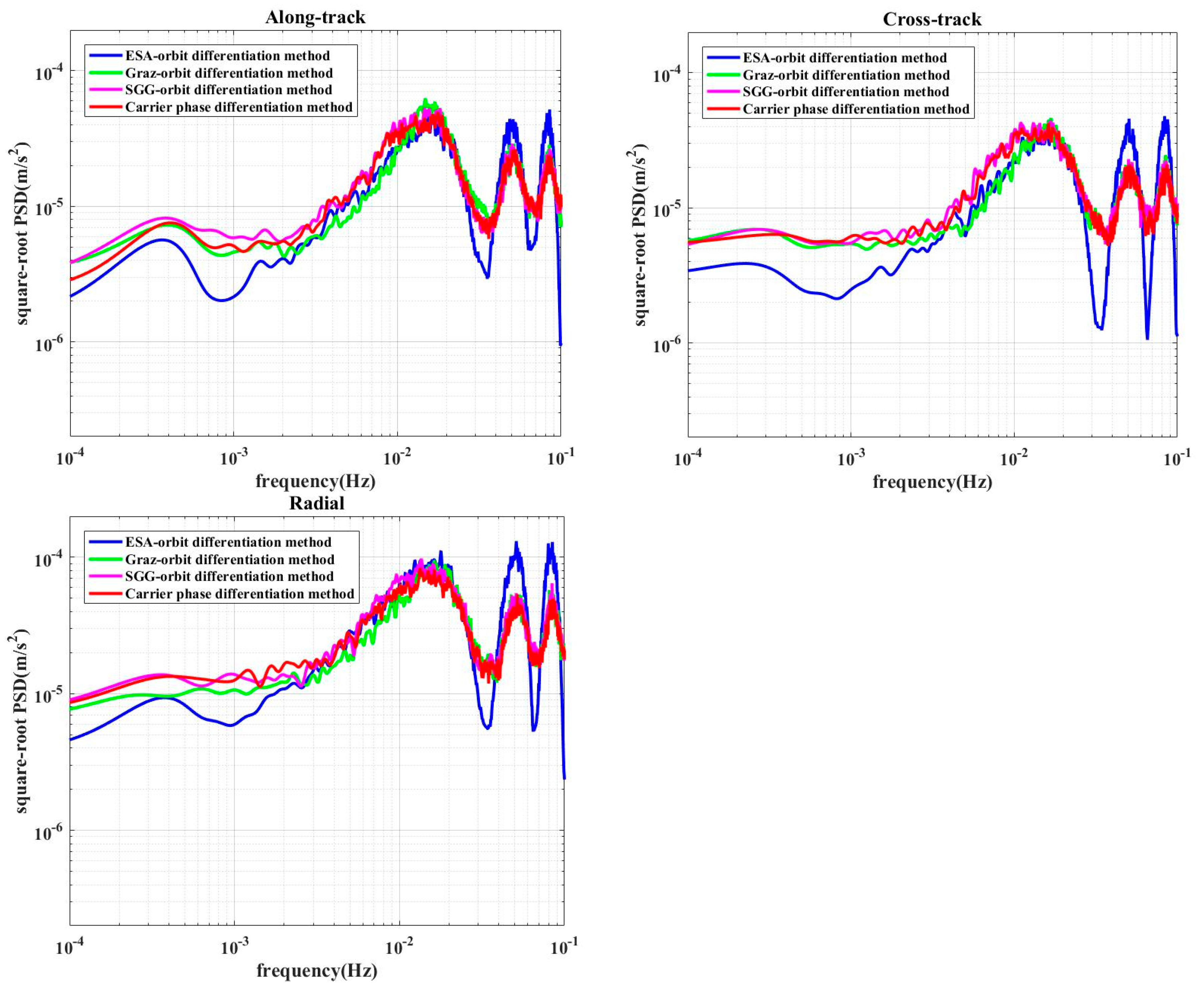
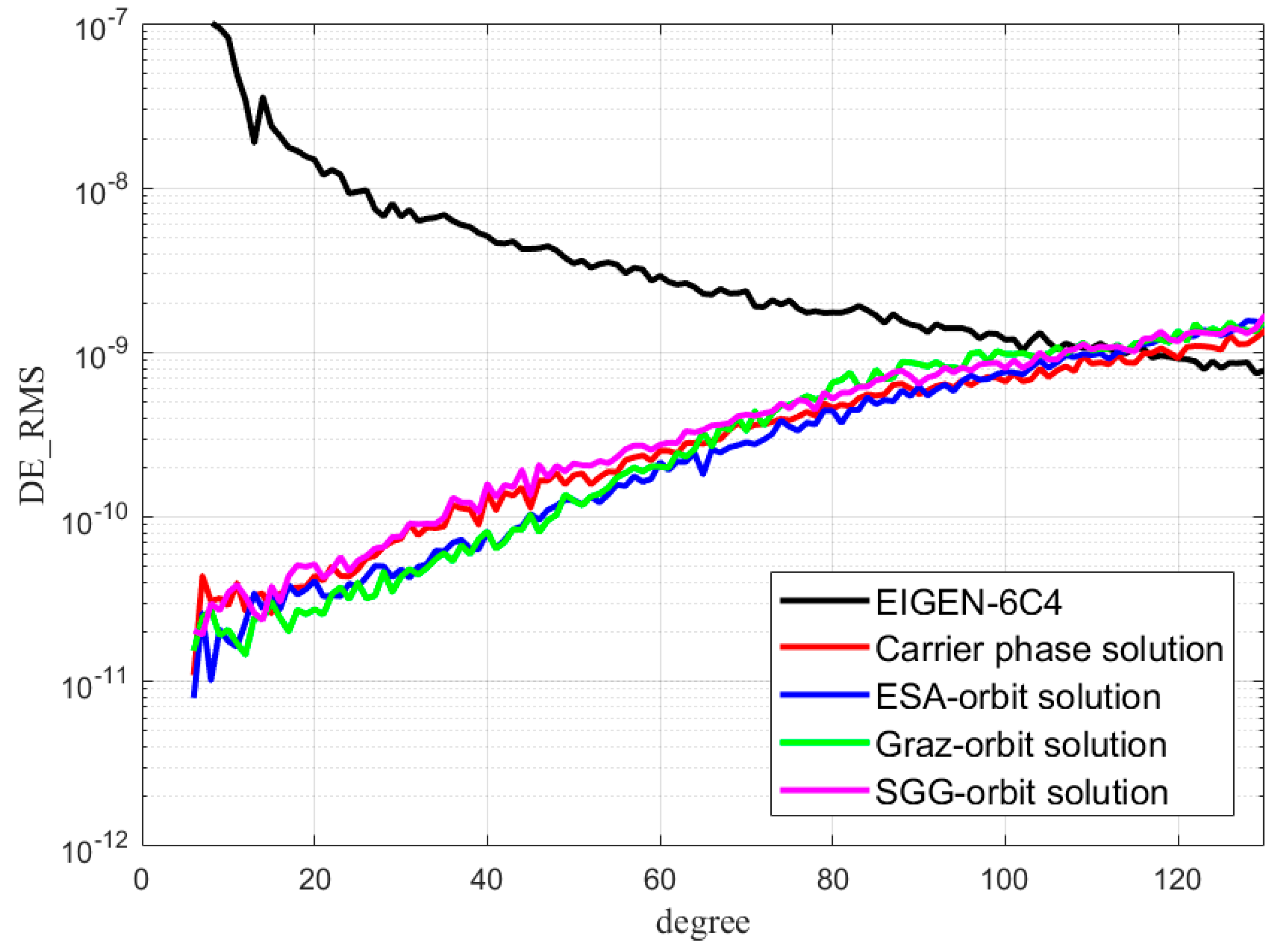
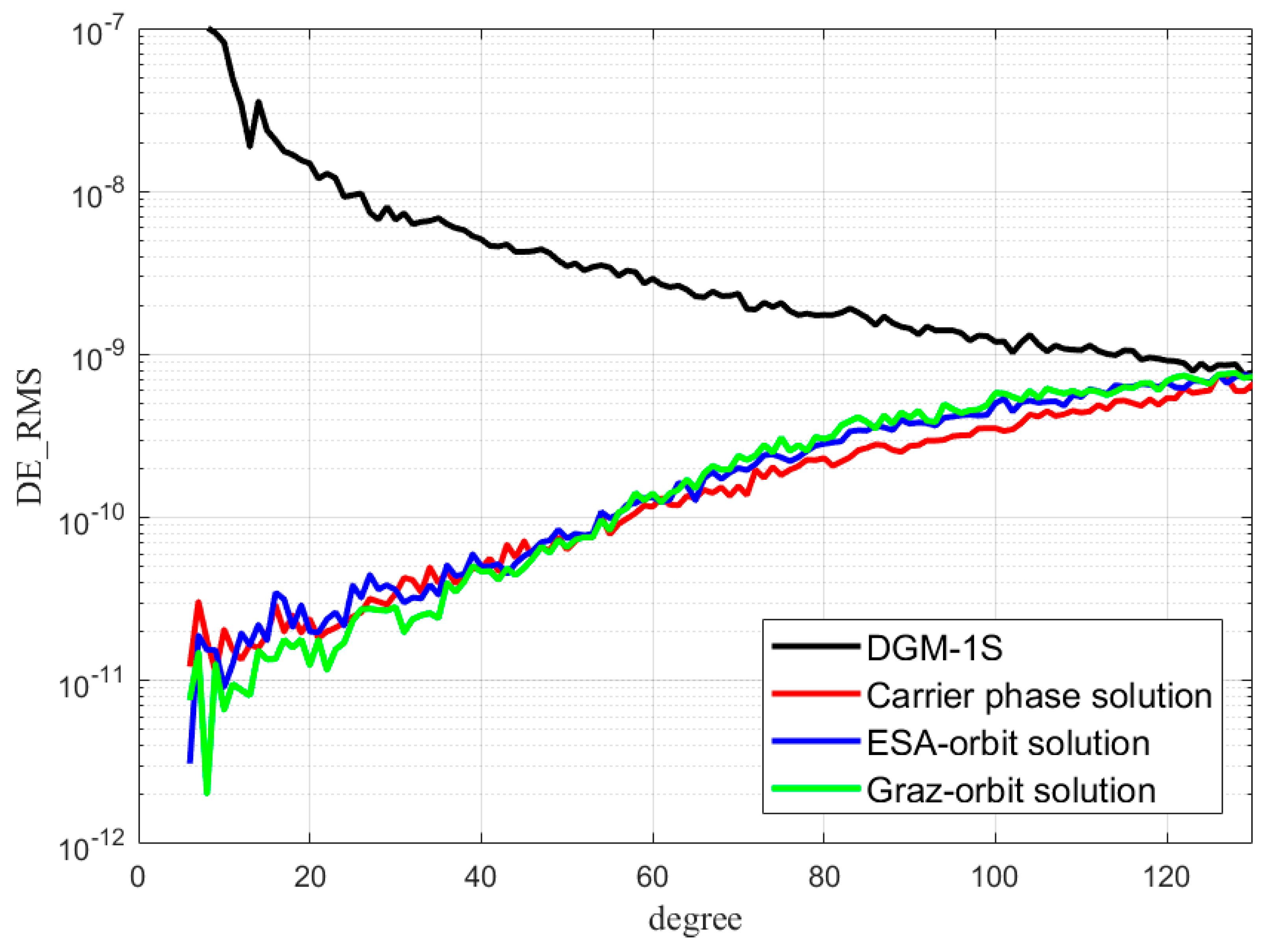
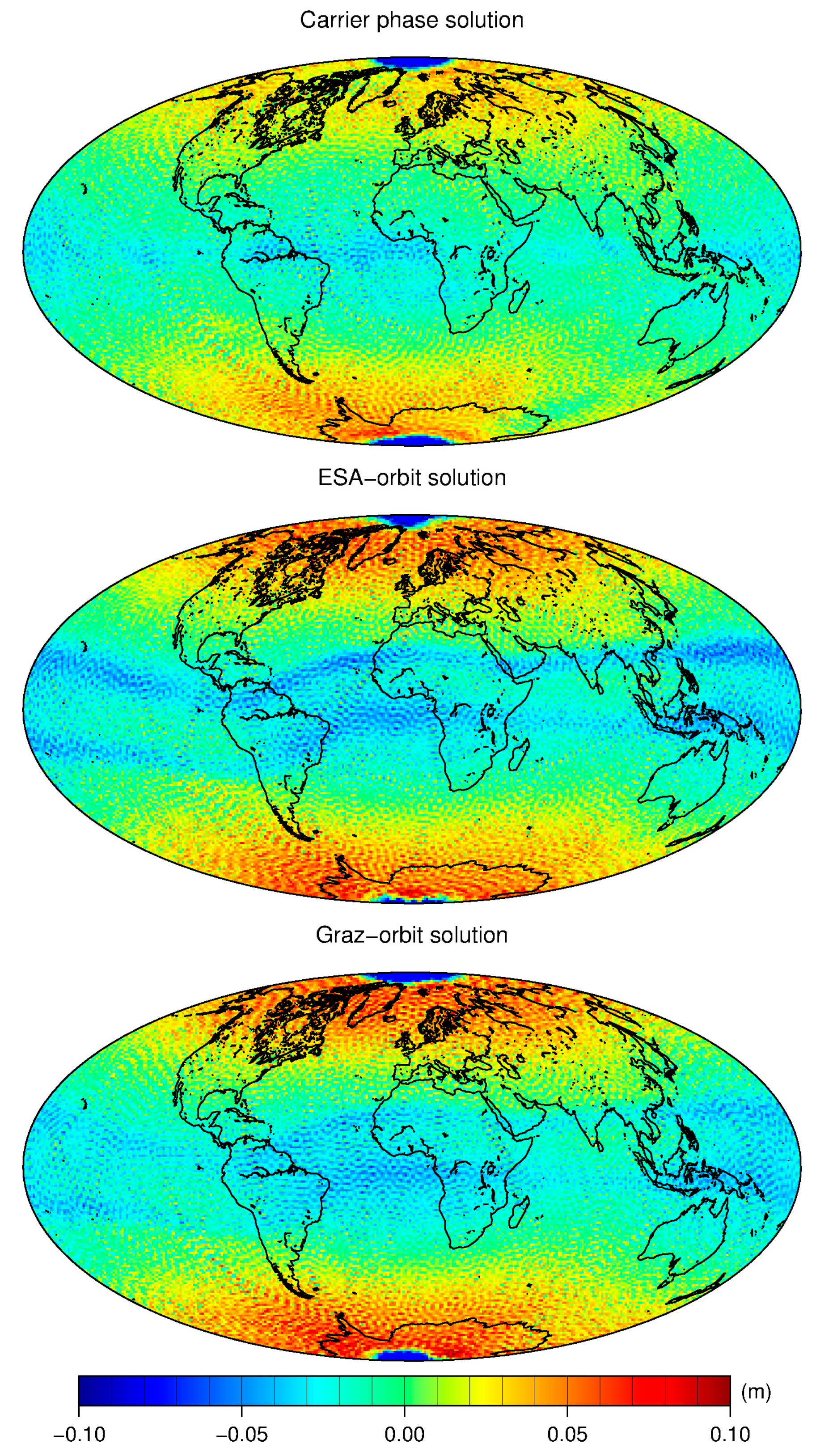
According to
Figure 4 and
Figure 6 as well as
Table 5 and
Table 7, the carrier phase solution showed a slightly better performance than the other solutions derived from the orbits only in the high-frequency portion; the 71-day solution corresponds to degree
n > 100 and 2.5-year solution corresponds to degree
n > 70. In this frequency band, the acceleration noise of the carrier phase solution was lower than the others, as shown in
Figure 2. The degrees 100 and 70 approximately correspond to the frequency 0.019 and 0.013 Hz. In comparison with the Graz-orbit solution, the carrier phase solution had a lower accuracy for the degree
n < 70 and a higher accuracy for
n > 70, which is consistent with frequencies less than 0.013 Hz (approximately corresponding to the degree 70). Moreover, the cumulative geoid height differences of the Graz-orbit, ESA-orbit, and carrier phase solutions up to degree 50 were 0.97, 1.01, and 1.08 cm, respectively, as seen in in
Table 7, which shows that the Graz-orbit solution had the highest precision for the degrees lower than 50. In
Table 5, the carrier phase solution was better than the SGG-orbit solution for almost all degrees (n > 30), and the accuracy improvement of geoid height up to d/o 130 was 21%, which is similar to that in Guo et al. [
25]. A comparison of
Figure 4 and
Figure 6 as well as
Table 5 and
Table 7 indicates that the longer data period has improved the solutions significantly along the entire frequency band. In addition, as depicted in
Figure 5 and
Figure 7, the pronounced errors along the geomagnetic equator were observed in all solutions. This is a result of the high electron density in addition to large short-term variations in the ionosphere near the geomagnetic equator [
47,
48].
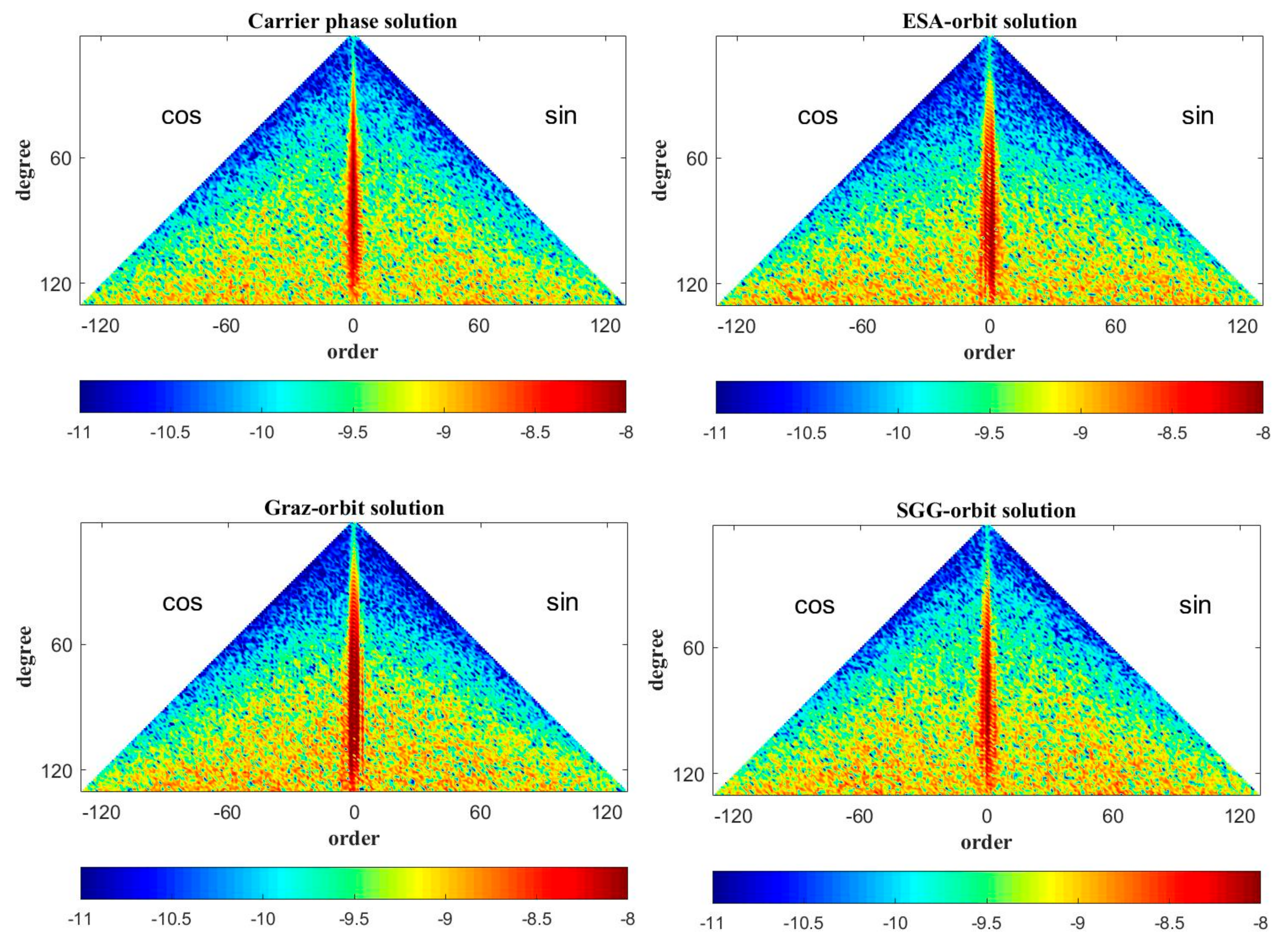
As shown in
Figure 3, the zonal and near-zonal spherical harmonics coefficients of the recovered models were worse than the other coefficients due to the fact that the GOCE satellite flies in a sun synchronous orbit with an inclination of 96.7°, which causes the ill-posed problem of the least squares used for recovering the gravity field model [
49,
50]. However, zonal harmonic coefficients estimated by the carrier phase differentiation method were slightly better than those from the orbit differentiation method.
5. Conclusions
The point-wise acceleration approach was proposed to recover the gravity field model based on satellite accelerations directly estimated from the GOCE’s onboard carrier phase observations. The satellite accelerations derived by the carrier phase differentiation method had a slightly better quality in terms of time-domain than those derived by the kinematic orbit differentiation method, respectively. A static gravity field model up to degree and order 130 was compiled from 71 days and 2.5 years of GOCE SST-hl data by the carrier phase differentiation method. Additionally, the gravity models were estimated based on the conventional orbit differentiation method from the ESA’s, Graz’s, and SGG’s PKI orbits. In comparison with the reference models (EIGEN-6C4 and DGM-1S) in accordance with DE-RMS, the 71-day carrier phase solution was slightly better than the SGG-orbit solution in the entire frequency band; however, it showed a worse performance in the low frequency part than the ESA-orbit solution and Graz-orbit solution. Furthermore, the 2.5-year carrier phase solution had the best accuracy for the degrees greater than 70, and its cumulative geoid height error up to d/o 130 was the lowest, which indicates that the proposed approach in this paper shows very good performance for gravity field modeling from the SST-hl observations.
The empirical variance-covariance matrices used in this paper were constructed directly by using the residual accelerations. In the future, the variance-covariance matrix can be derived by using the error propagation method from the prior carrier phase and orbital variance-covariance information.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}