1. Introduction
Soil is an important natural resource that provides food and fiber for the survival of earth organisms, as well as the sustainable development of ecosystems [
1,
2,
3,
4]. Soil provides a physical basis for human survival, activity, development, and agricultural production, and it serves as an important carrier. However, natural primary salinization and secondary salinization caused by unreasonable human activities are the most common cause of soil degradation in arid and semi-arid areas, and this is an important global ecological problem. Soil hardening, a decrease in fertility, and pH changes caused by soil salinization [
5,
6,
7,
8,
9] can seriously restrict agricultural production, upset economic sustainability and development, and cause ecological imbalance. Because soil salinization represents a severe threat to human survival and development, it has attracted worldwide attention. Several statistical investigations have shown that 9.55 × 10
8 hm
2 of soil is under threat of salinization across the globe [
10,
11]. This amounts to approximately 20% of the global total of arable land spread over more than 100 different countries. The area affected by secondary salinization is about 0.77 × 10
8 hm
2 and is growing at a rapid rate [
10,
11]. Traditional laboratory chemical analysis requires the excavation and collection of soil samples as well as transportation to a laboratory for analysis, which damages the soil, Moreover, this method is time consuming, labor intensive, and has a high testing cost [
12,
13,
14,
15]. However, visible and near-infrared hyperspectral technology is fast, very efficient, non-polluting, economical, and harmless. Hyperspectral remote sensing can quickly gather soil surface spectral reflectance data and produce a continuous, complete, detailed and accurate ground spectrum record [
16,
17,
18,
19,
20]. Hyperspectral remote sensing can even reflect the physical and chemical characteristics of soil, making the quantitative determination of soil salt content, as well as other key soil indicators, possible. This can satisfy farmers’ needs for more accurate information as well as scientific evaluation.
Human activities have a serious effect on the physical properties of the soil. The type of activity, level, and its duration will determine the degree of impact on soil characteristics and heterogeneity. In recent years, domestic and international scholars have been paying considerable attention to human activities relating to soil, and this has become an important subject of study [
21,
22,
23]. However, there have been very few studies on the relationship between different levels of human activities and salinity. For example, Ding et al. [
24] measured the spectral reflectance of salinized soil and vegetation in the Weigan-Kuqa River Delta Oasis on the northern edge of the Xinjiang Tarim Basin. They conducted a spectrum transformation of the hyperspectral data obtained from soil and vegetation samples and determined the most sensitive wave band, indicative of the salinization level. Viscarra et al. [
25] used different wavelength spectra and a partial least squares regression (PLSR) to estimate multiple soil attributes. Their results showed that the near-infrared spectrum provided fairly precise measurements of exchangeable potassium, but the accuracy was far lower than that achieved for soil organic carbon and pH. Debaene et al. [
26] used visible and near-infrared spectra to predict attributes, such as available potassium and phosphorus, Mg, and soil organic carbon (SOC) in soil. However, their results for available potassium and phosphorus were less than ideal. Ben-Dor et al. [
27] used a DAIS-7915 sensor to conduct a quantitative inversion and obtain soil moisture data. The soil moisture parameters were used for an indirect inverse soil salt content determination. Qu et al. [
28] utilized raw reflectance data and the PLSR method to build a soil salt content quantitative inversion model for the Inner Mongolia Hetao irrigation area. Liu et al. [
29] utilized a visible and near-infrared spectrum method in a feasibility study for the assessment of soil potassium content in Qian County yellow soil, Shaanxi. They built a soil potassium content calculation model using laboratory spectral reflectance, total soil potassium, available potassium content, multiple linear regression (MLR), and PLSR. Liu et al. [
30] utilized visible/short wave near infrared spectroscopy (Vis/SW-NIRS) to determine the available nitrogen and potassium in soil. In their study, they used the standard normal variation (SNV) method, multiple scattering correction (MSC) method, and Savitzky-Golay smoothing and combined them in a first-order differential algorithm for impellent spectrum pre-processing analysis. The simulation showed that the least squares-support vector machine (LS-SVM) model was more precise.
The construction of a good soil salt content hyperspectral quantitative inversion model is very important for soil salinization hyperspectral monitoring. Farifteh et al. [
31] employed PLSR and artificial neural network (ANN) methods to analyze the correlation between different sized soil spectra and soil salt content in the Netherlands, Hungary, and Australia. Weng et al. [
32] employed PLSR to build a soil salt content model for the Yellow River Delta. Sidike et al. [
33] employed multiple regression and PLSR to build a soil salt content prediction model for Pingluo County in the Ningxia Hui Autonomous Region. Zhang et al. [
34] employed a PLSR model for the quantitative inversion of salt content in northeast soda saline soil and then used an inverse logarithmic transform, after spectral signal smoothing, to build the model. The ratio of performance to deviation (RPD) for this model was 1.61, and the coefficient of determination was 0.6677. All these studies used spectral reflectance as the input signal and used the model to determine the output relationship. Linear regression is frequently used for model comparison, and the root mean square error (RMSE), coefficient of determination (R
2), and RPD are used to verify predictive ability. However, these models only use linear fitting in the spectral system for expression, which does not provide a very good prediction. While the input can have multiple variables, the corresponding output can have only one variable. If multiple output variables are required, multiple models must be used simultaneously.
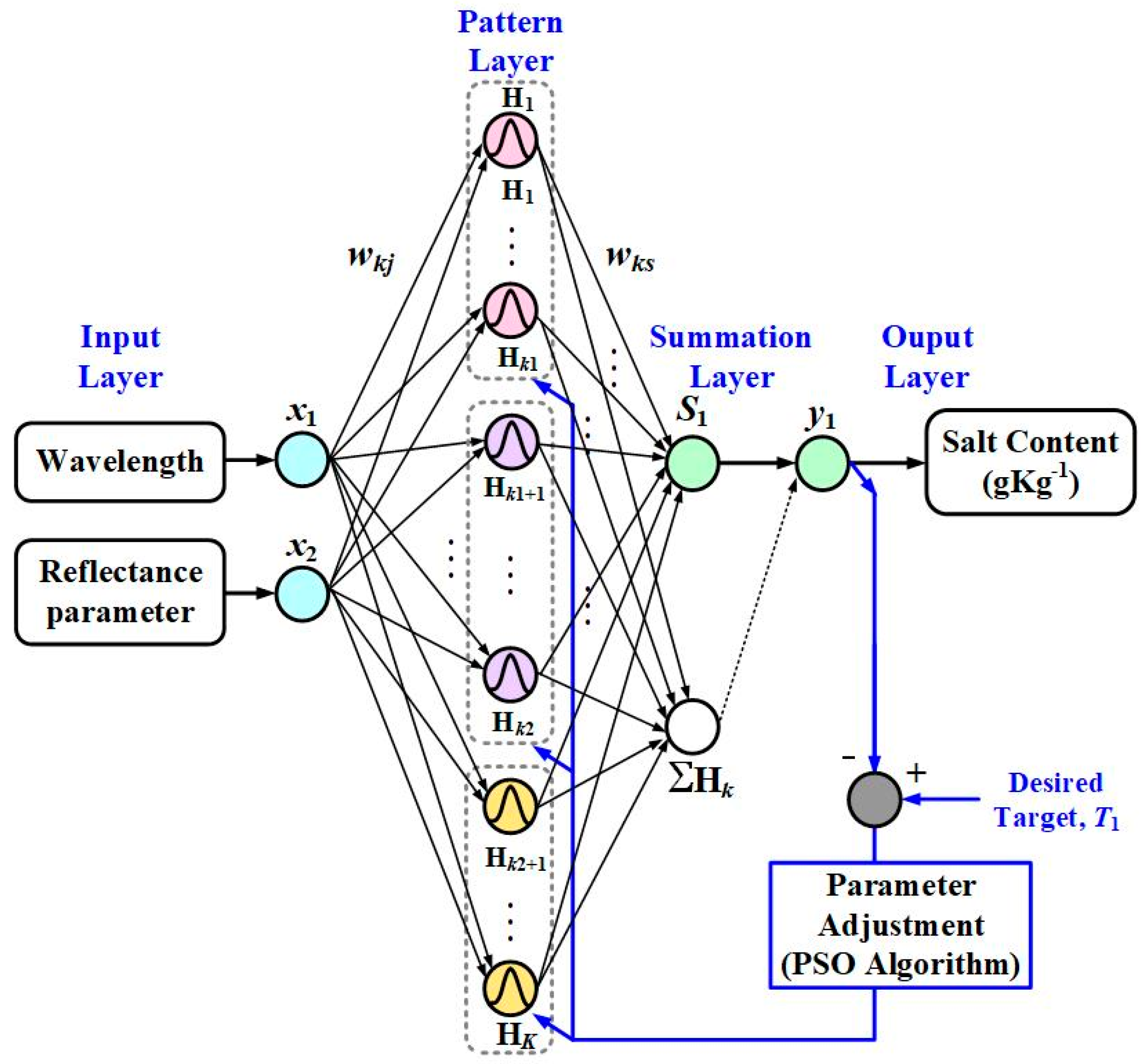
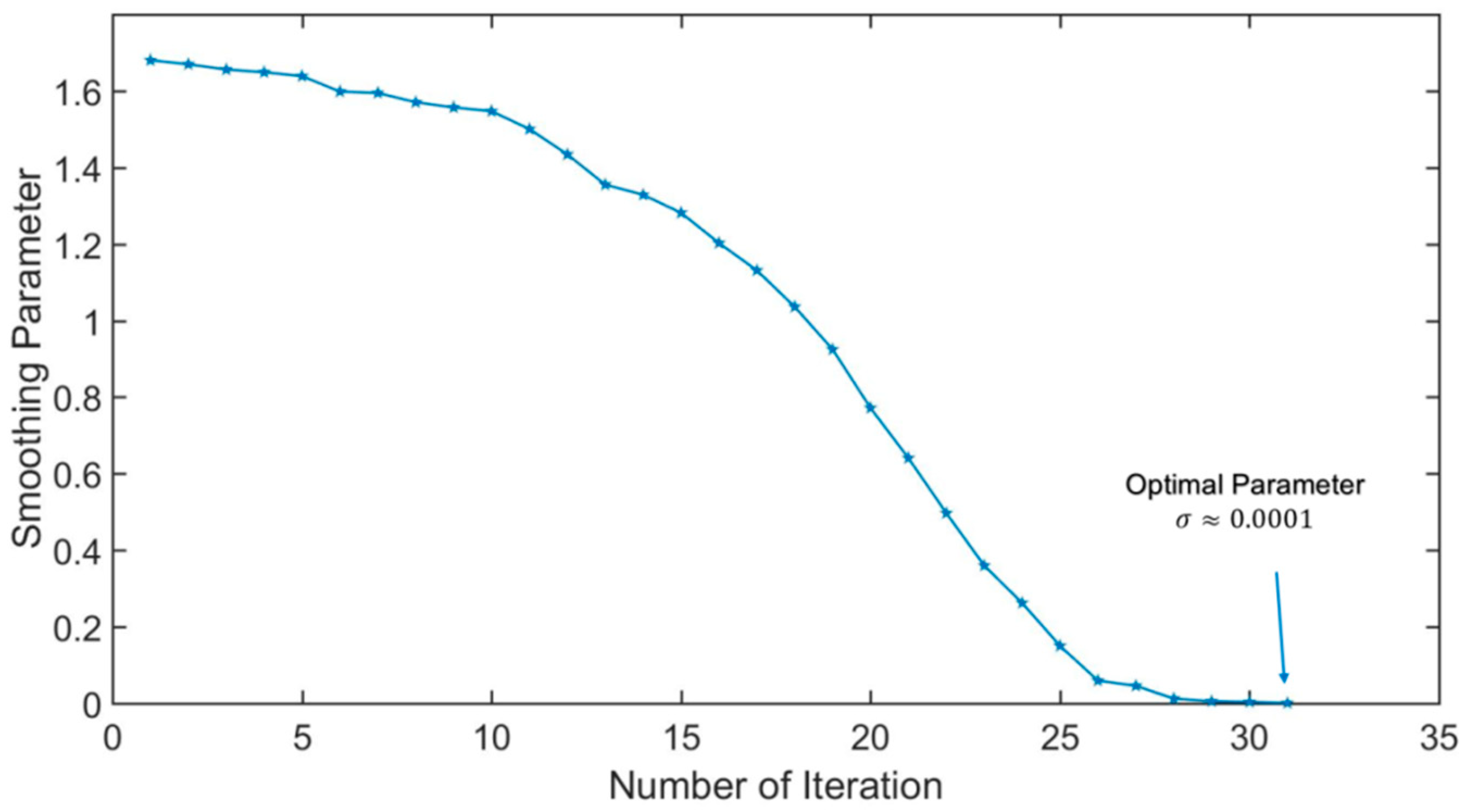
To overcome the poor prediction of linear PLSR models and to avoid the heavy calculation load of non-linear ANN models, a probability neural network (PNN) model was proposed in this paper. Particle swarm optimization was used to adjust the optimal smoothing parameter of the PNN model and to avoid the long training process required by a traditional neural network. In order to show the effects of human activities, the optimized wave band regions with and without human activities are also discussed in this study.
6. Discussion
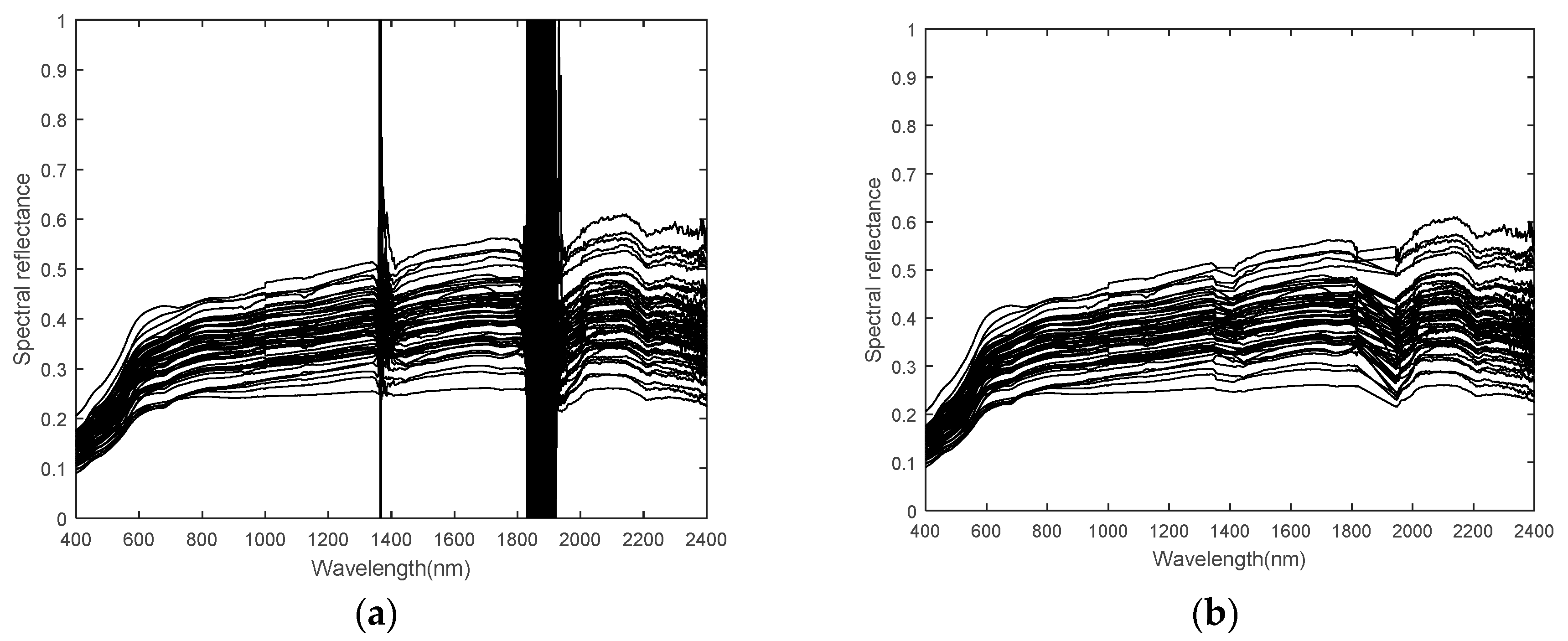
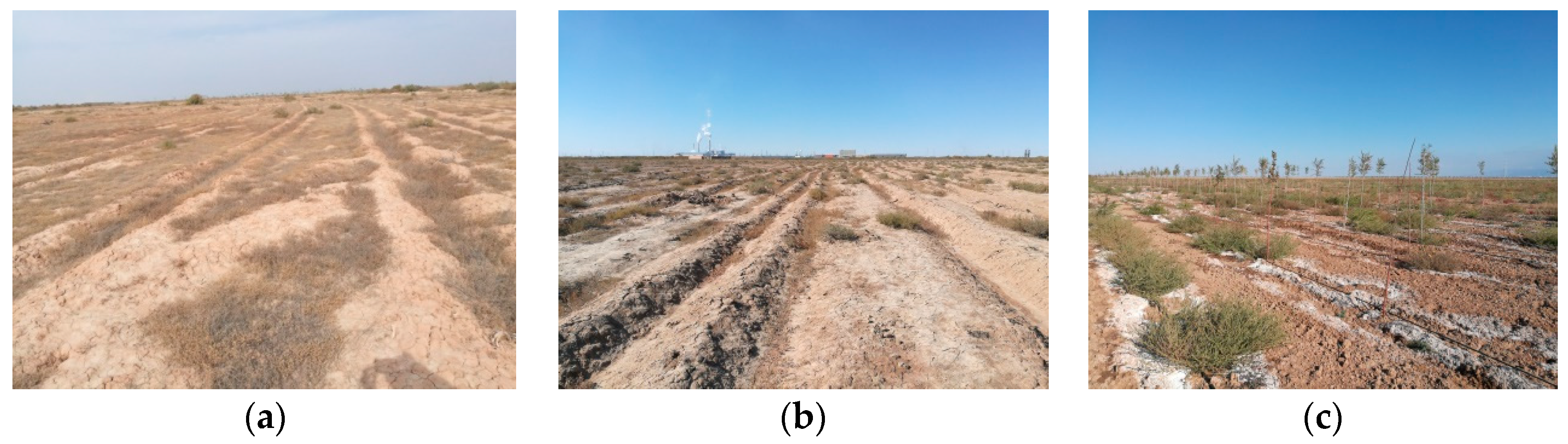
The PNN model had a better performance in Area A than in Area B with respect to prediction. The main reason for this was that Area B had been disturbed by plowing, as shown in
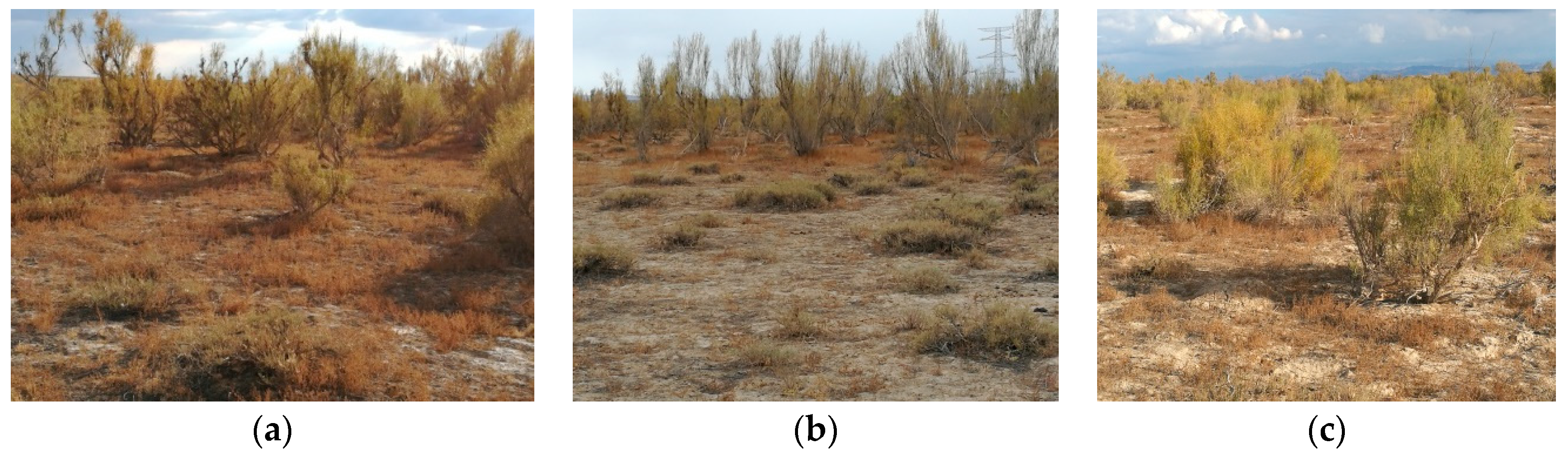
Figure 10. The soil surface had undergone different degrees of damage, and the soil moisture and salt content shifts were more complex. These factors interfered with the features of the soil spectrum. Area A had remained more or less in its natural state, as shown in
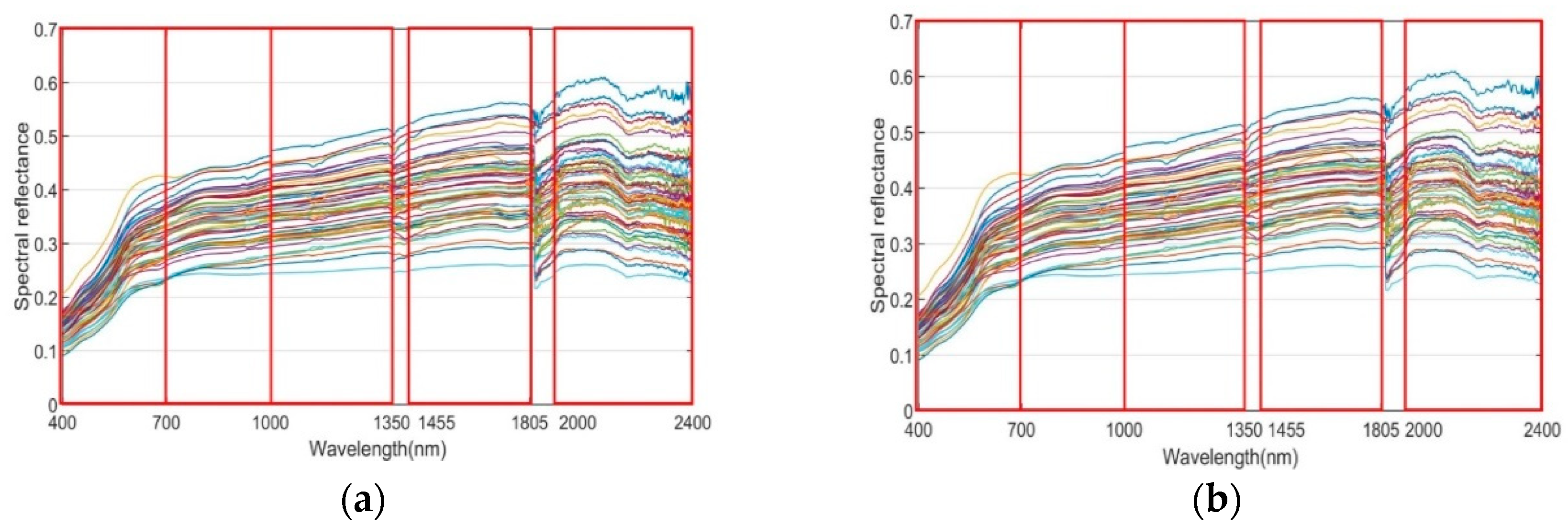
Figure 11, and the prediction ability of the PNN model was better. The results also showed that the optimal band interval in the PNN model was 1000–1350 nm, under near-infrared short-wave bands, and 400–700 nm, under visible light bands, for Area A and Area B, respectively. The results obtained in this study were consistent with the similar band intervals of previous studies [
47,
48,
49,
50]. Previous researchers used spectroscopy to predict salt content and found that the optimal band was also in the visible light and near-infrared short-wave bands.
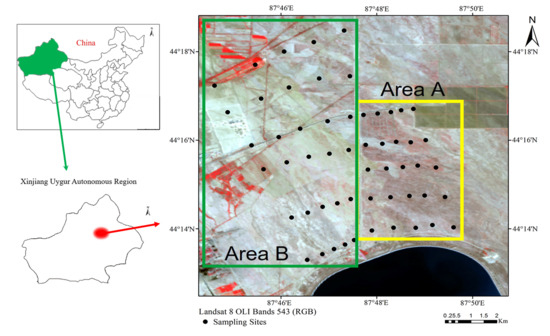
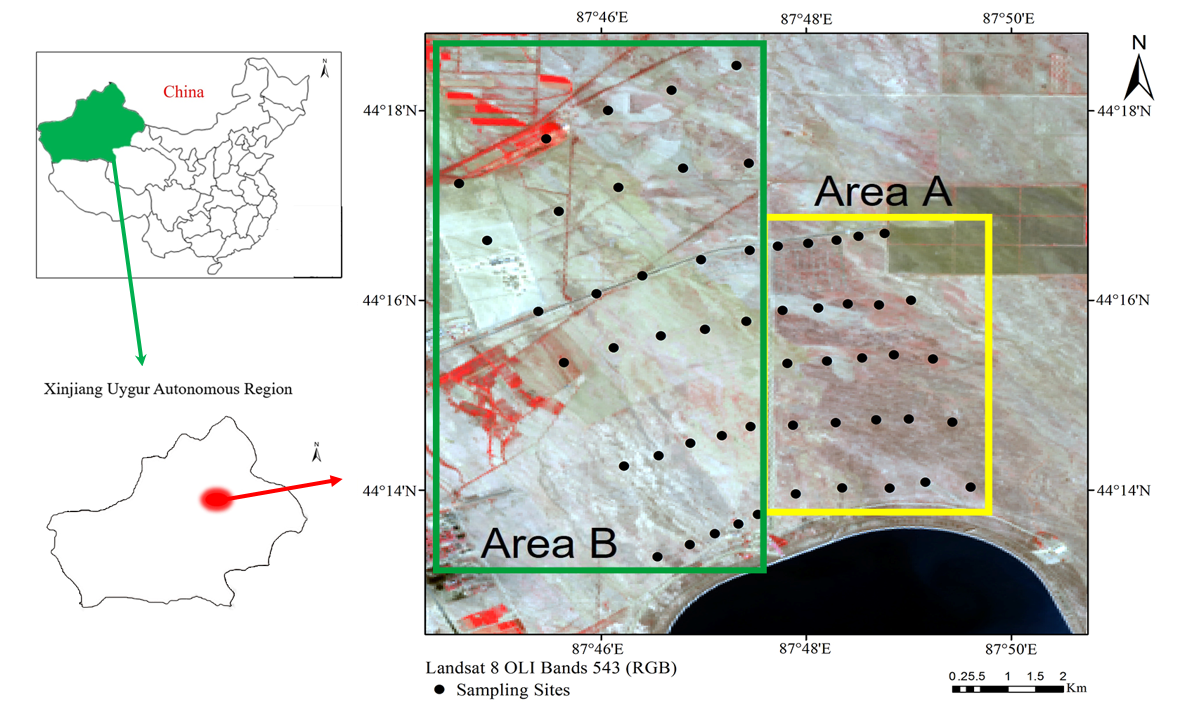
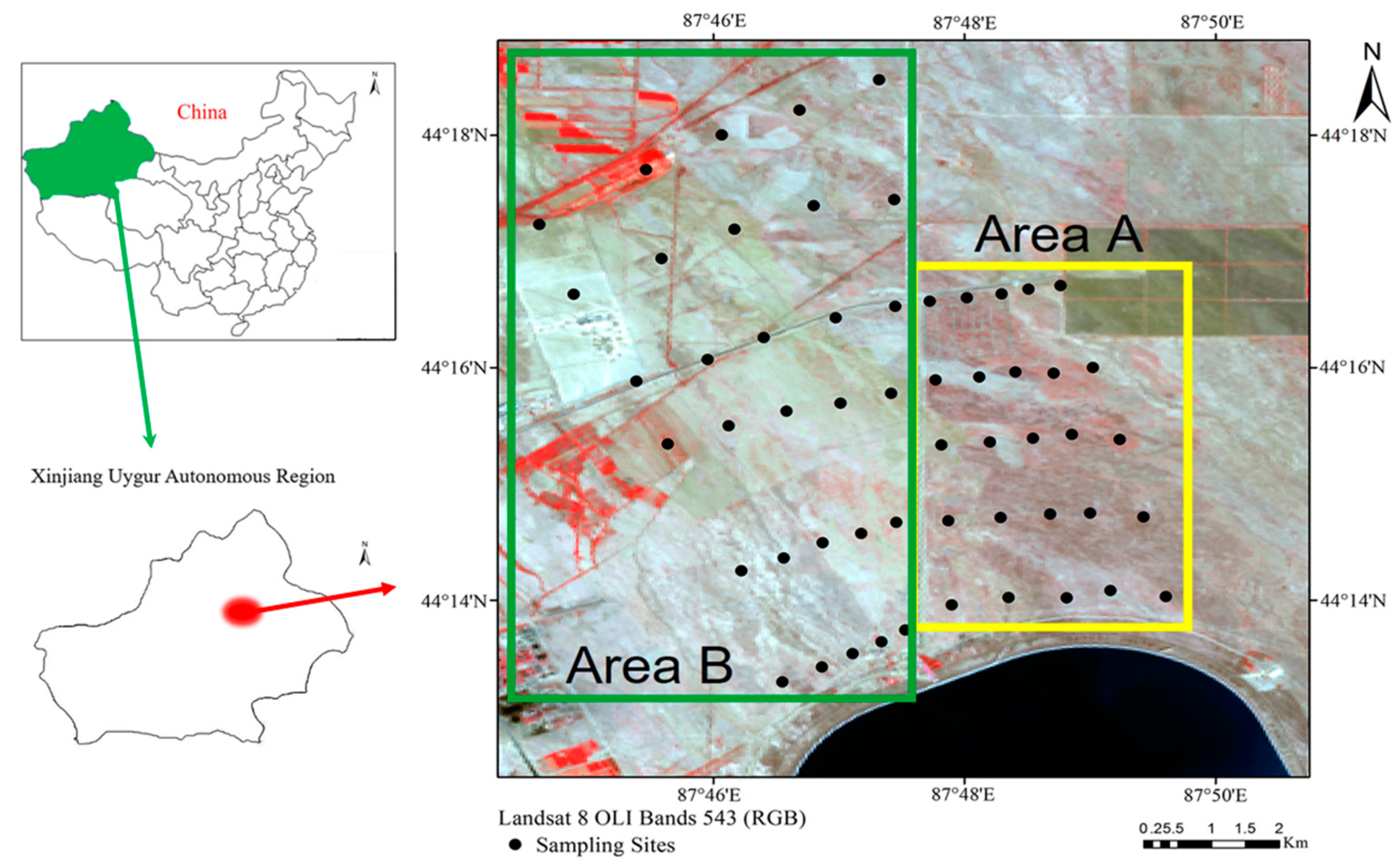
We conducted a field investigation of the study areas in 2016. The study areas are located near the Xinjiang 102 Construction Army Corp. It was found that there is a huge canal between Area A and Area B, which is 24 m wide at the highest point, 6 m wide at the lowest point, 5 m deep, and 15.3 km long. We divided the two different regions using the canal as a boundary.
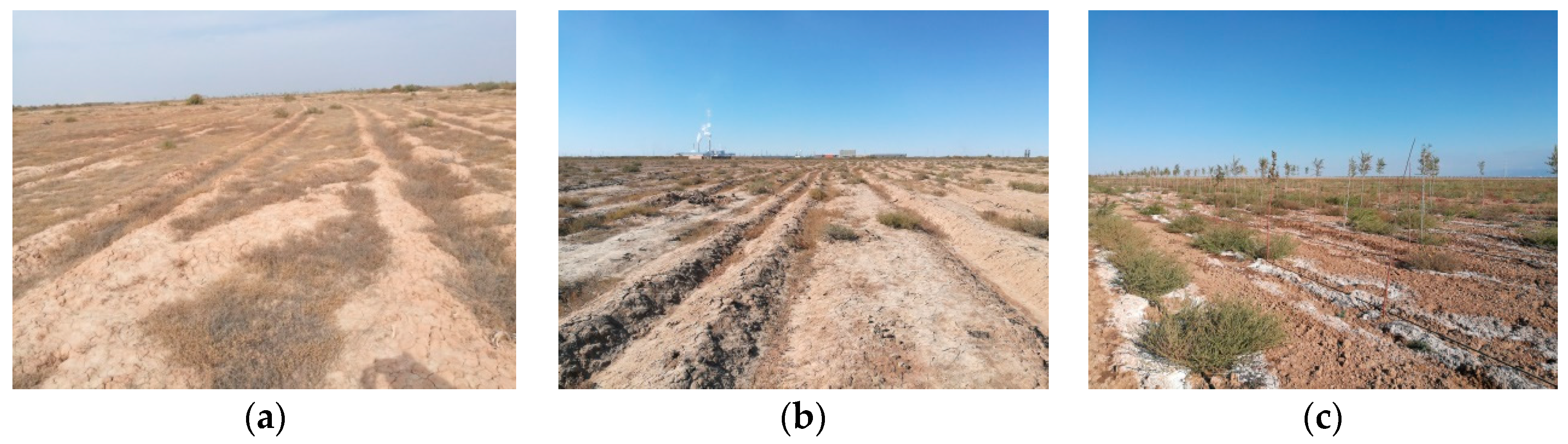
From an analysis of different soil properties caused by human activities, it can be seen that Area A is far from human settlement, and is rarely affected by human activities due to the area’s isolation caused by the huge canal. This area basically has maintained its original ecological environment. However, Area B is very close to the location of 102 Construction Army Corp, and some houses in human settlements can be seen in
Figure 10b, indicating that the human activities in this area are very intensive. Therefore, the soil properties caused by human activities in the two areas are significantly different.
From an analysis of the soil cover environment, it can be seen that there are some haloxylon, red willow, and salt claw in the soil surface of Area A. Due to the small range of soil spectral tests, we chose to perform spectral measurements at locations where the soil surface is covered by less vegetation. However, most of the land in Area B has been developed, and some soils have been leveled, as shown in
Figure 10a,b. At the same time, some soils in Area B have been cultivated into tree seedlings, as shown in
Figure 10c. Particularly in
Figure 10c, we can see that there are some white salts on the surface of the soil, indicating that the salinization of this area is very extensive. Therefore, the soil cover environment in the two areas is differs significantly.
Moreover, in the process of land use and development in arid and semi-arid regions, the oasis ecological environment is under different degrees of human activity. The differences in the stress of human activities on the oasis ecological environment are mainly manifested in two aspects. The first is the difference in land use patterns and intensity. Second, there is a big difference in the duration of land use. Therefore, during the development and utilization of land, regular and irregular irrigation and the construction of ditches and networks will lead to a spatial imbalance of regional water. At the same time, the consolidation and development of land will directly change the local soil structure and type, causing changes in salt transport channels and transfer rates, which in turn exacerbate the complexity of salt spatial variability.
Finally, human activities refer to people controlling the development direction of the soil by changing a certain soil-forming factor or changing the contrast between various factors. For example, eliminating the original natural vegetation and replacing it with artificially cultivated crops or artificial vegetation can directly and indirectly affect the direction and intensity of the biological cycle of the soil. Irrigation and drainage can change the hydrothermal conditions of natural soils, thus changing the migration and transformation process of substances in the soil. Agricultural practices, such as farming and fertilization, can directly affect soil development, soil material composition and shape changes.
7. Conclusions
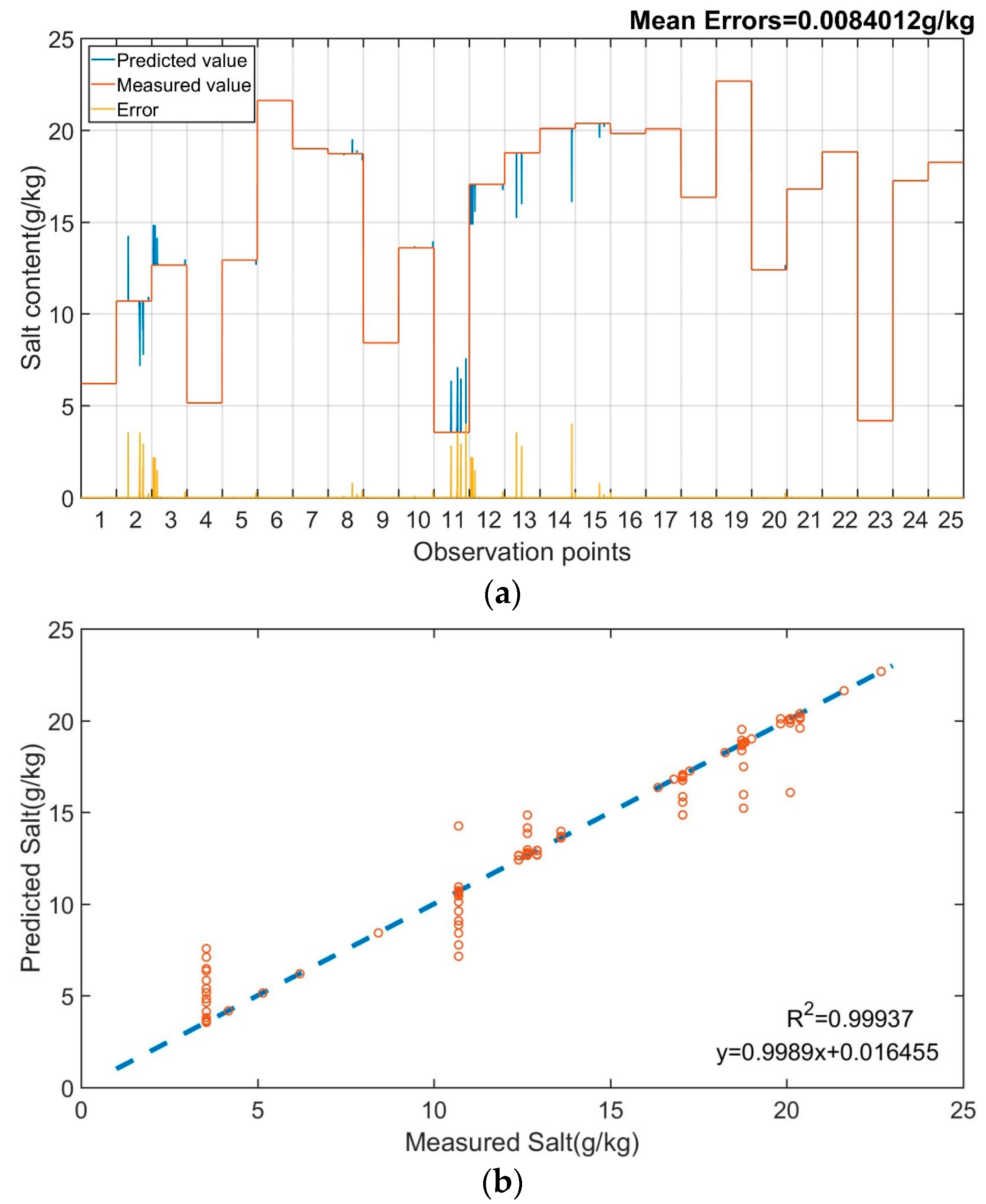
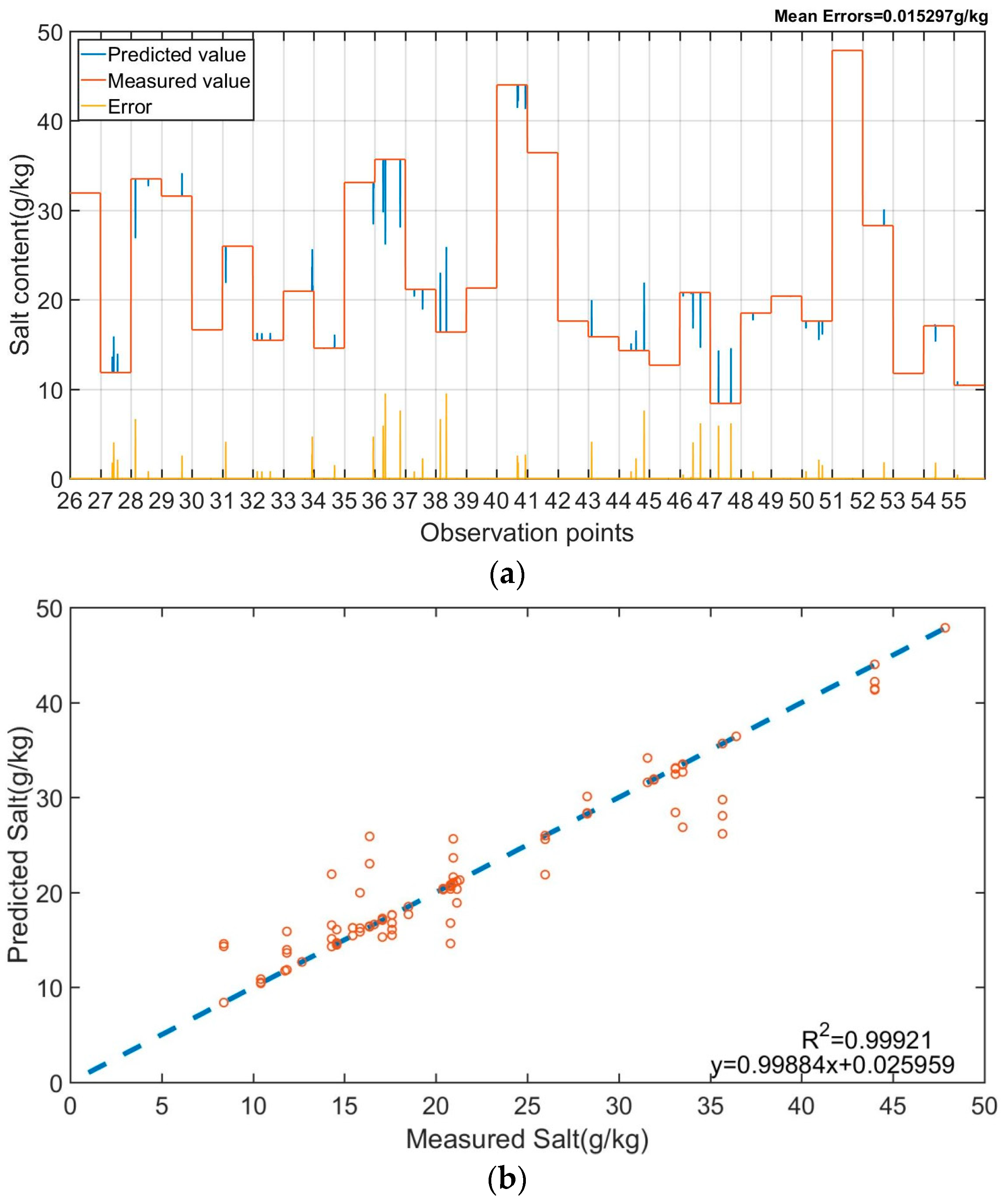
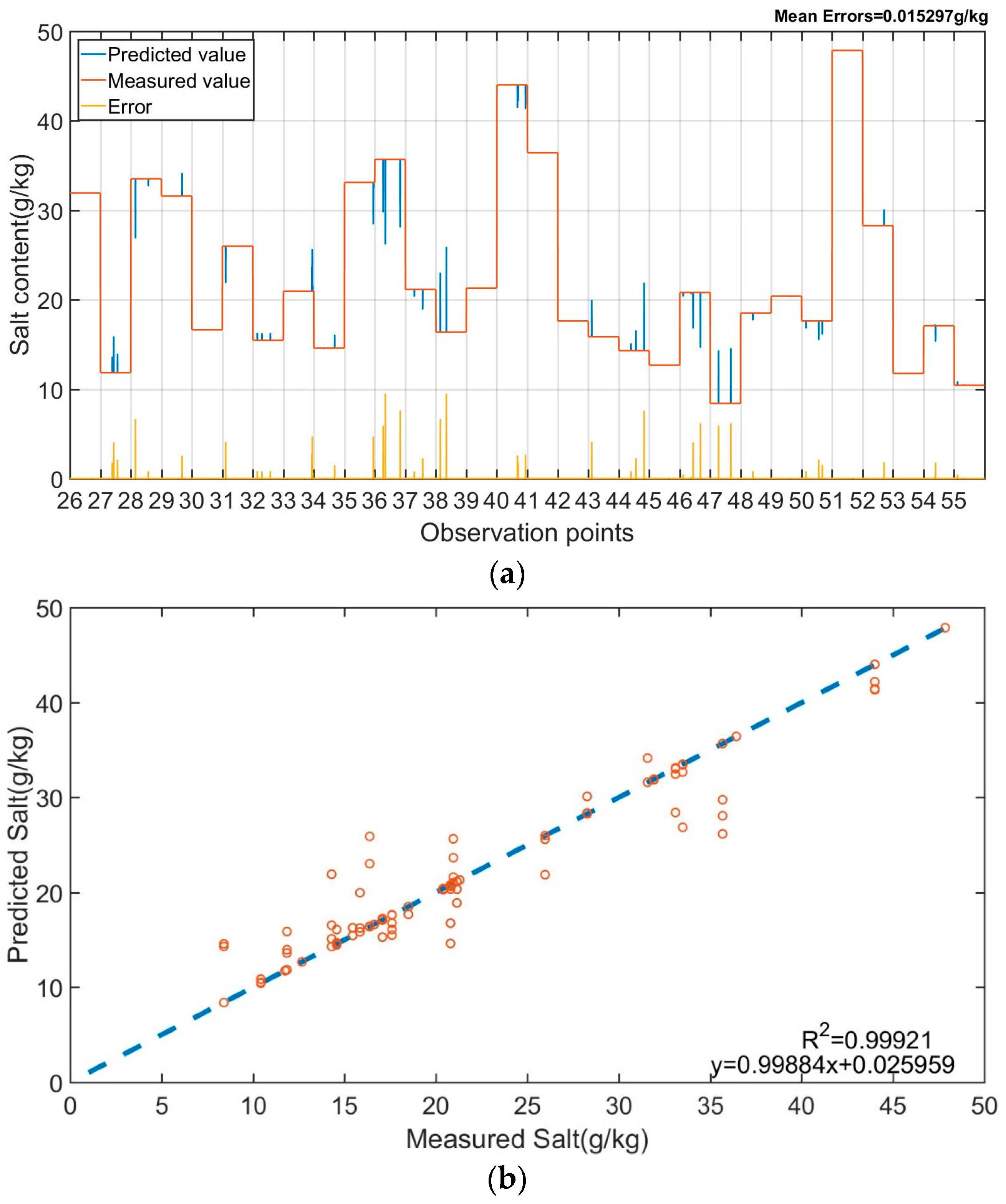
The results of this study show that after signal pre-processing was complete and the band had been selected, the mathematical introduction of PSO optimization into the PNN model using the method produced optimal results. The predictive ability indicator RPD for the PNN model with PSO optimization was greater than 30 in both Areas A and B, providing a clear indication of an excellent predictive ability. The results indicated that the optimal wave band intervals for PNN modeling differed in areas affected and non-affected by human activities. The optimal interval of the artificial activities region falls in the visible light band, and the optimized wave band region without human activities falls outside the visible light band. It was shown that the near-infrared short-wave bands in the range of 1000–1350 nm can be used to analyze undisturbed areas, and the visible light bands in the range of 400–700 nm are more suitable for analyzing areas that have been disturbed by human activities in Xinjiang, China. The of the PNN model for Area A was 0.999374, and the RPD was 39.99251. The of the PNN model for Area B was 0.999208, and RPD was 35.55161. The results of this study could provide a reference point for aircraft or satellite-carried remote sensing technology, large-scale soil salinization monitoring, salinization data extraction, and remote sensing topic mapping. The results can also be used as a reference point for the monitoring of other soil surface parameters, such as organic matter, pH value, and nitrogen, phosphorus, potassium, cation, and anion content. Lastly, the results of this study provide a new perspective in the hyperspectral technology monitoring of soil salinization in areas with different levels of human activities.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}