Hierarchical Model Predictive Control for Sustainable Building Automation

Abstract
:1. Introduction
2. MPC in Building Automation
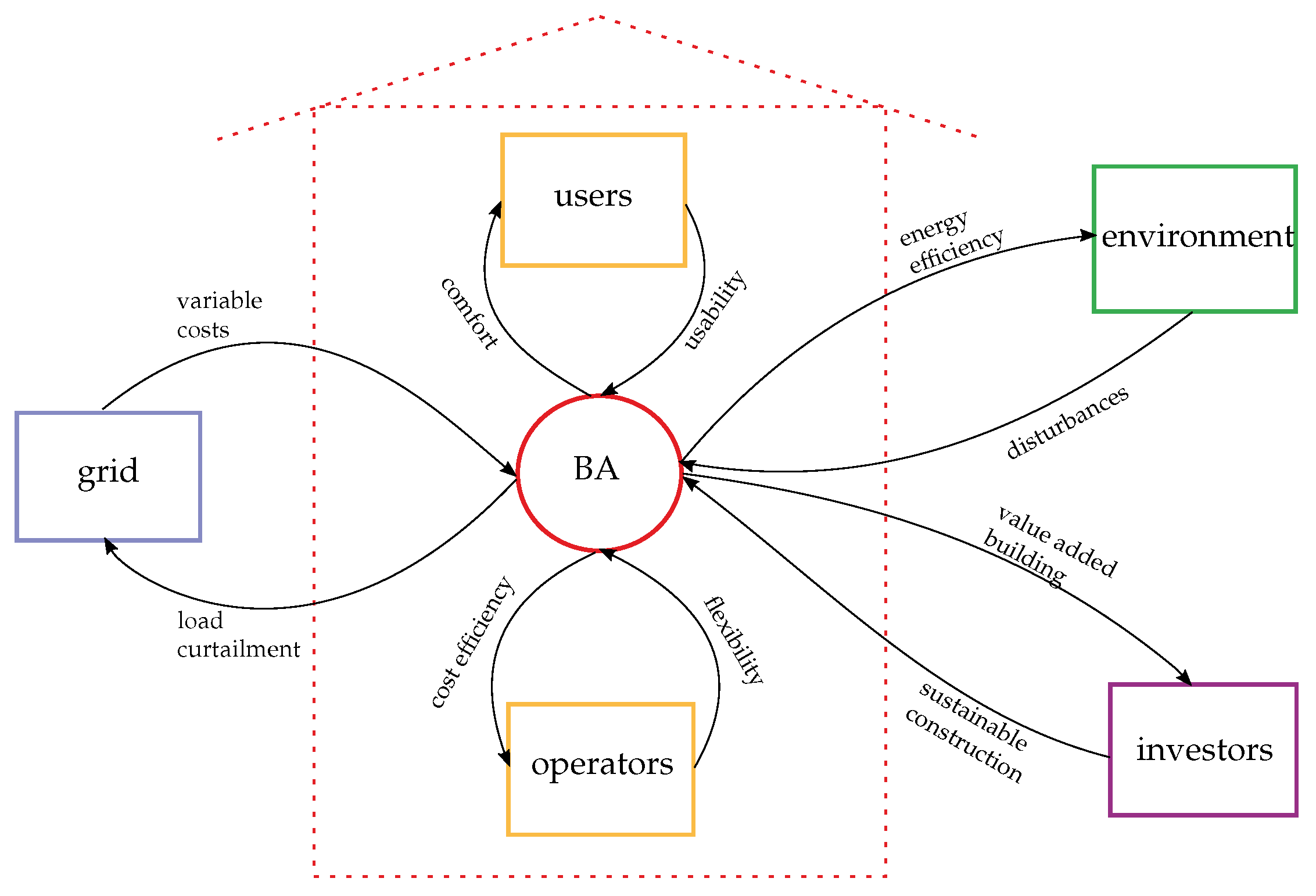
2.1. Building Automation and Sustainability
- sustainable user satisfaction, including thermal comfort and usability.
- energy efficiency, including a maximal usage of renewable energy sources.
- minimization of costs, including life cycle costs arising due to the minimization of aggregates’ wear.
- flexibility towards smart grids by taking advantage of varying prices and fulfilling load curtailment.
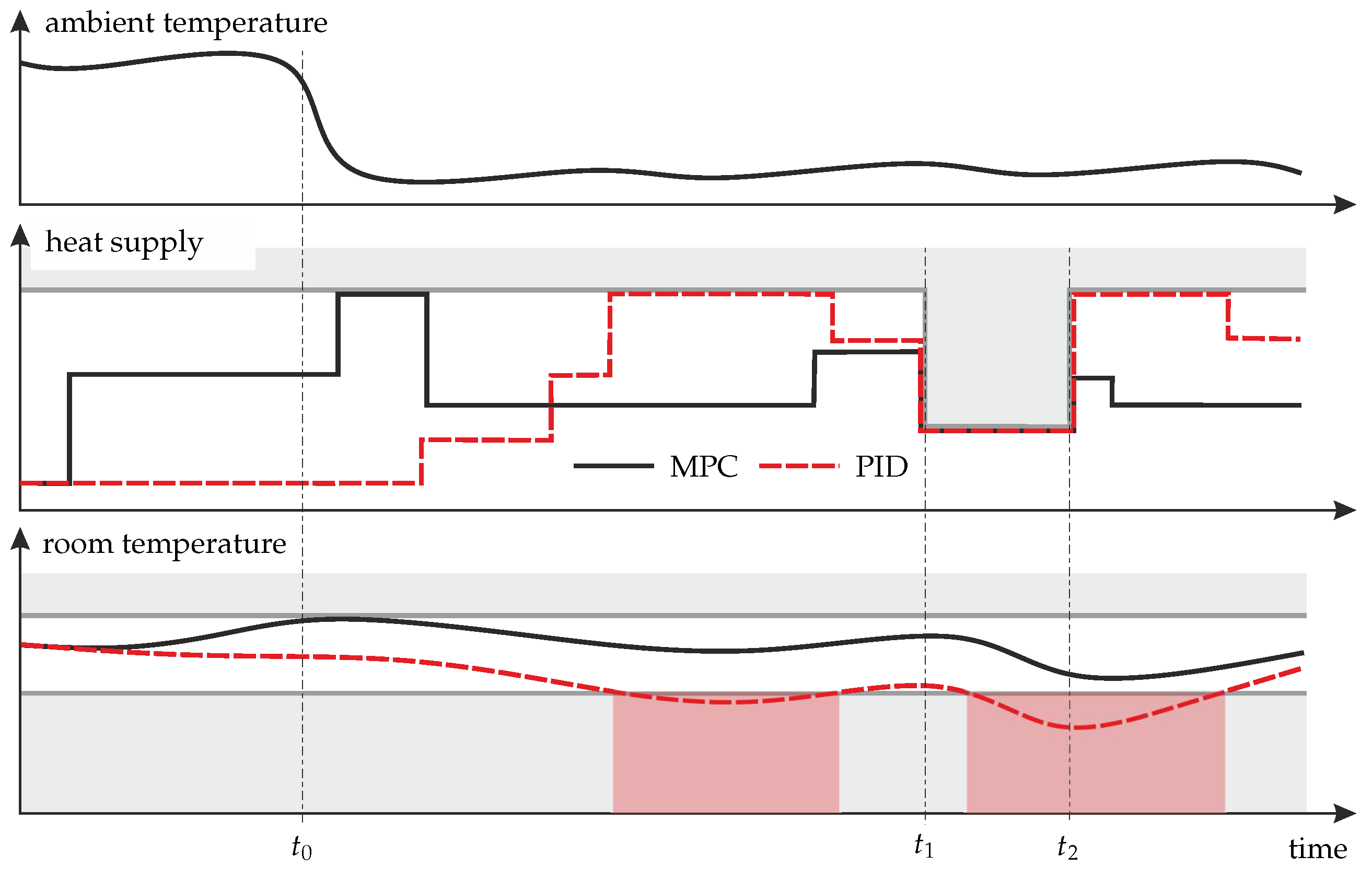
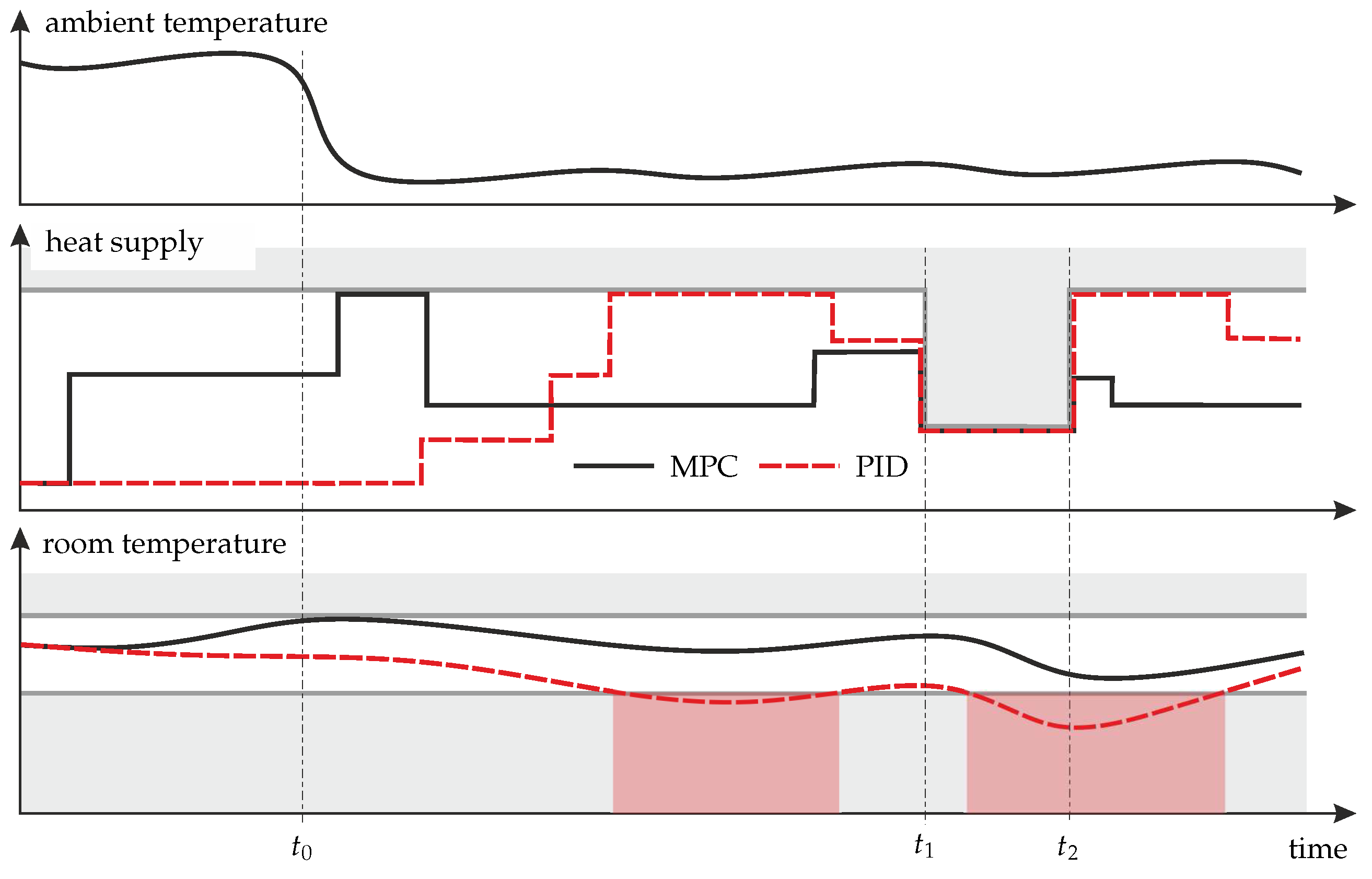
2.2. MPC versus PID
2.3. MPC Approaches in Building Automation
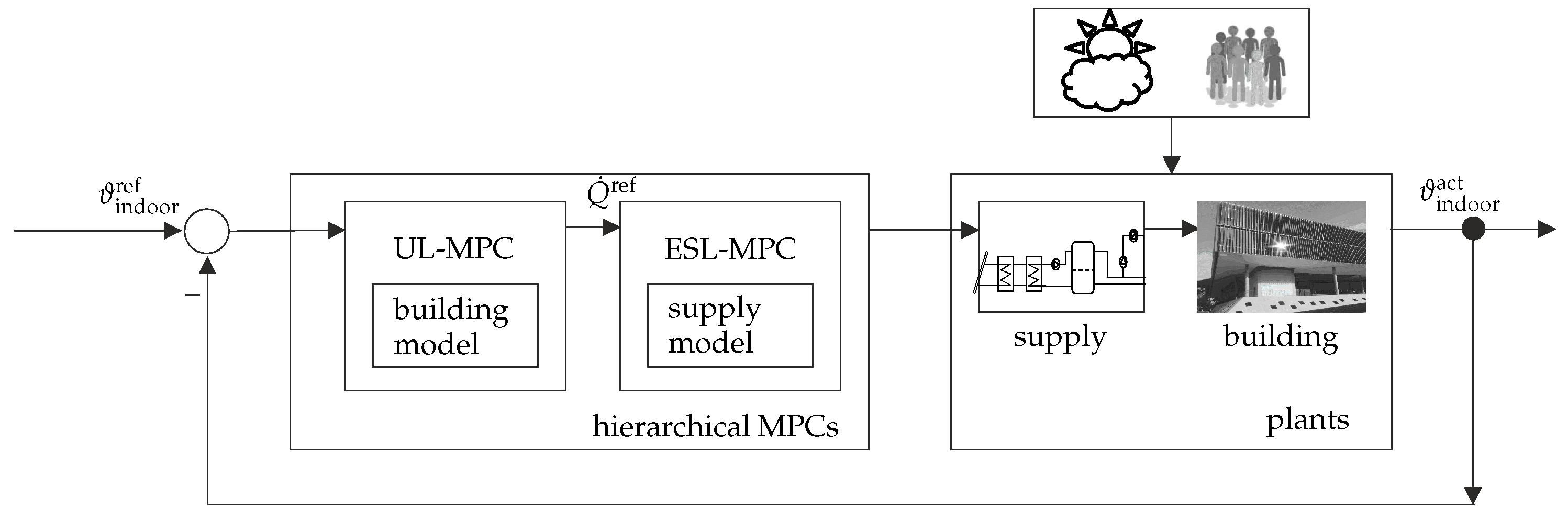
3. Hierarchical Model Predictive Control
3.1. Hierarchical MPC Concept
3.2. User Level MPC
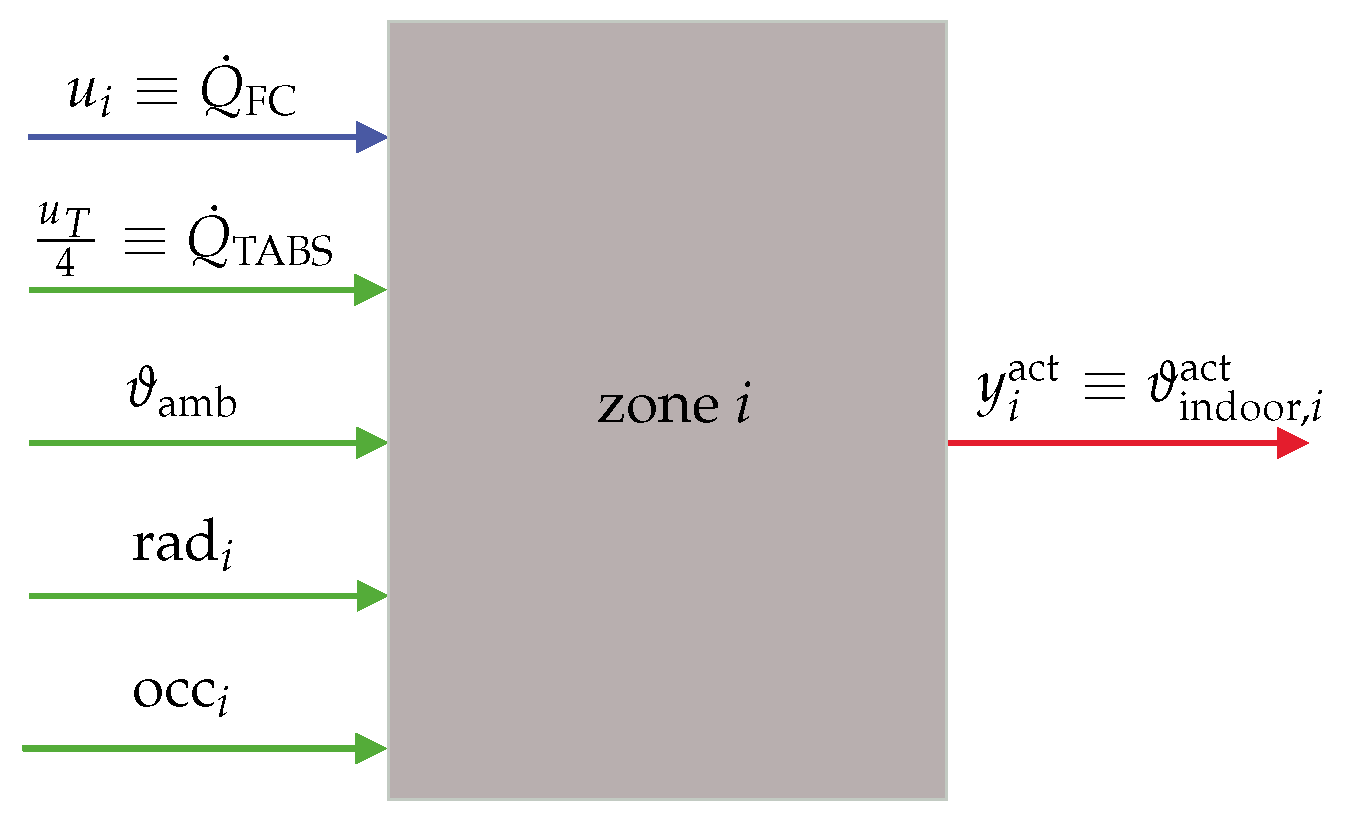
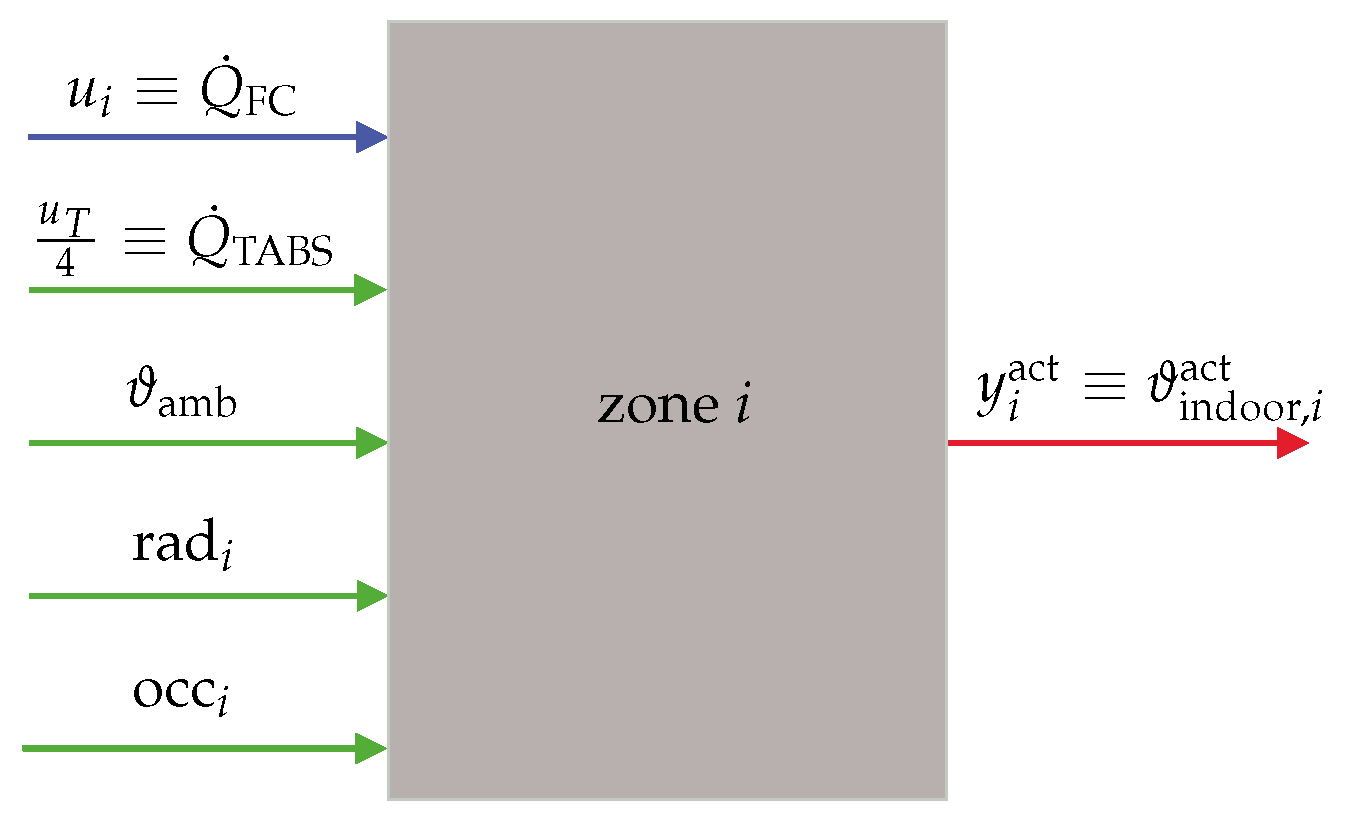
3.2.1. Building Model
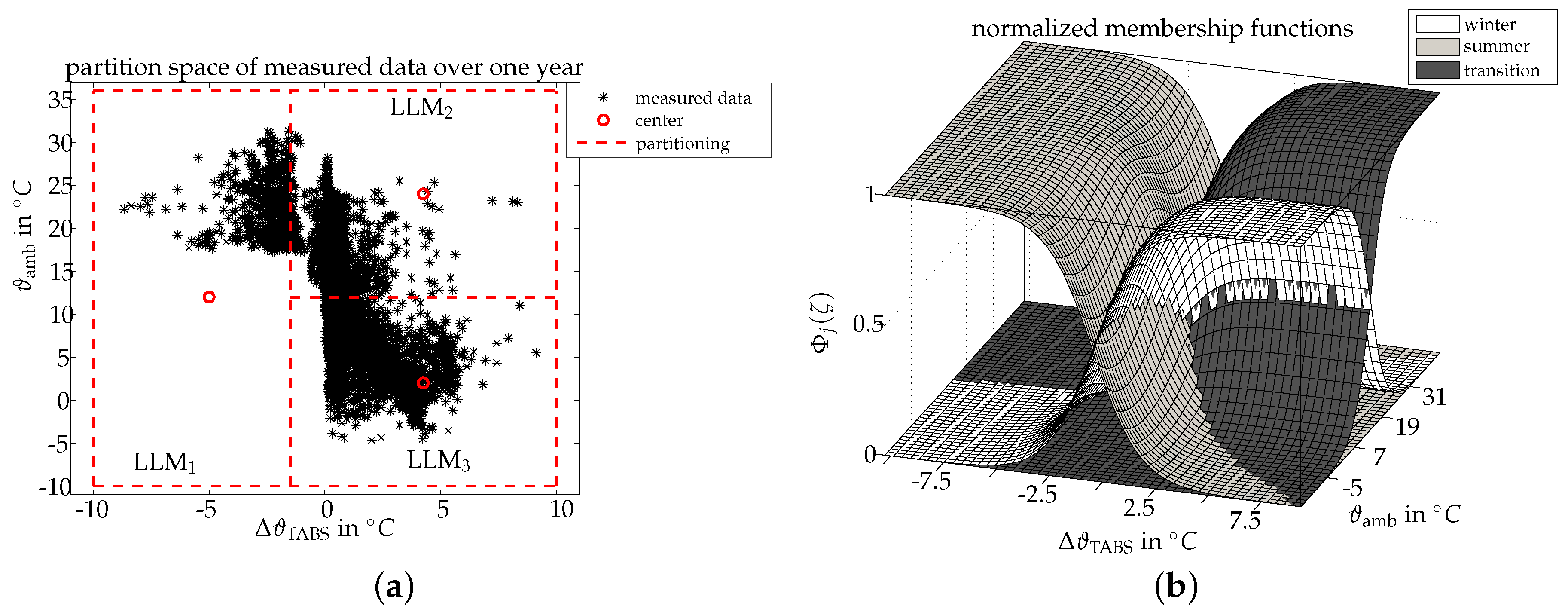
TS-Fuzzy Building Model
Specific Building Model
3.2.2. Objective
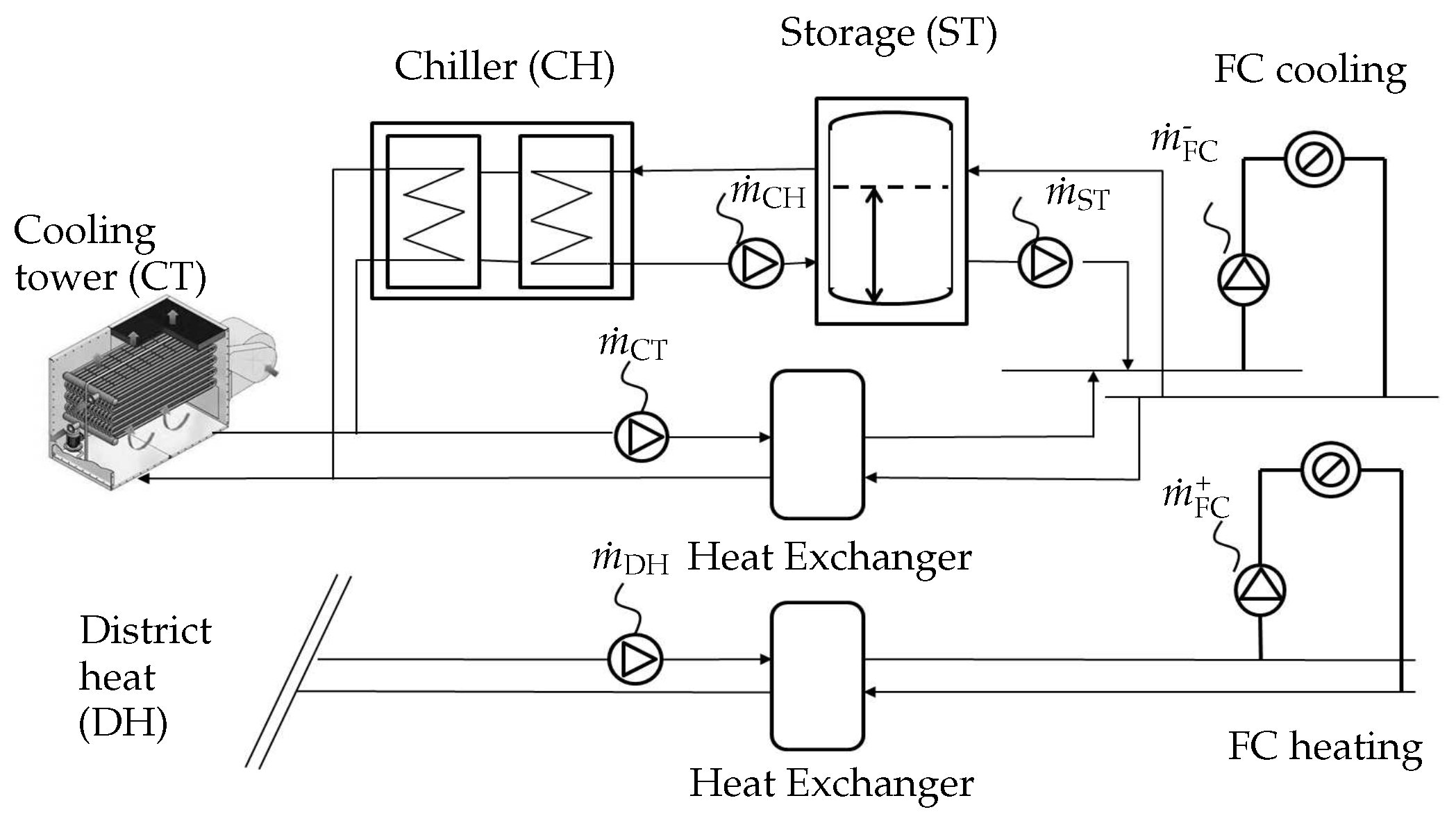
3.3. Energy Supply Level MPC
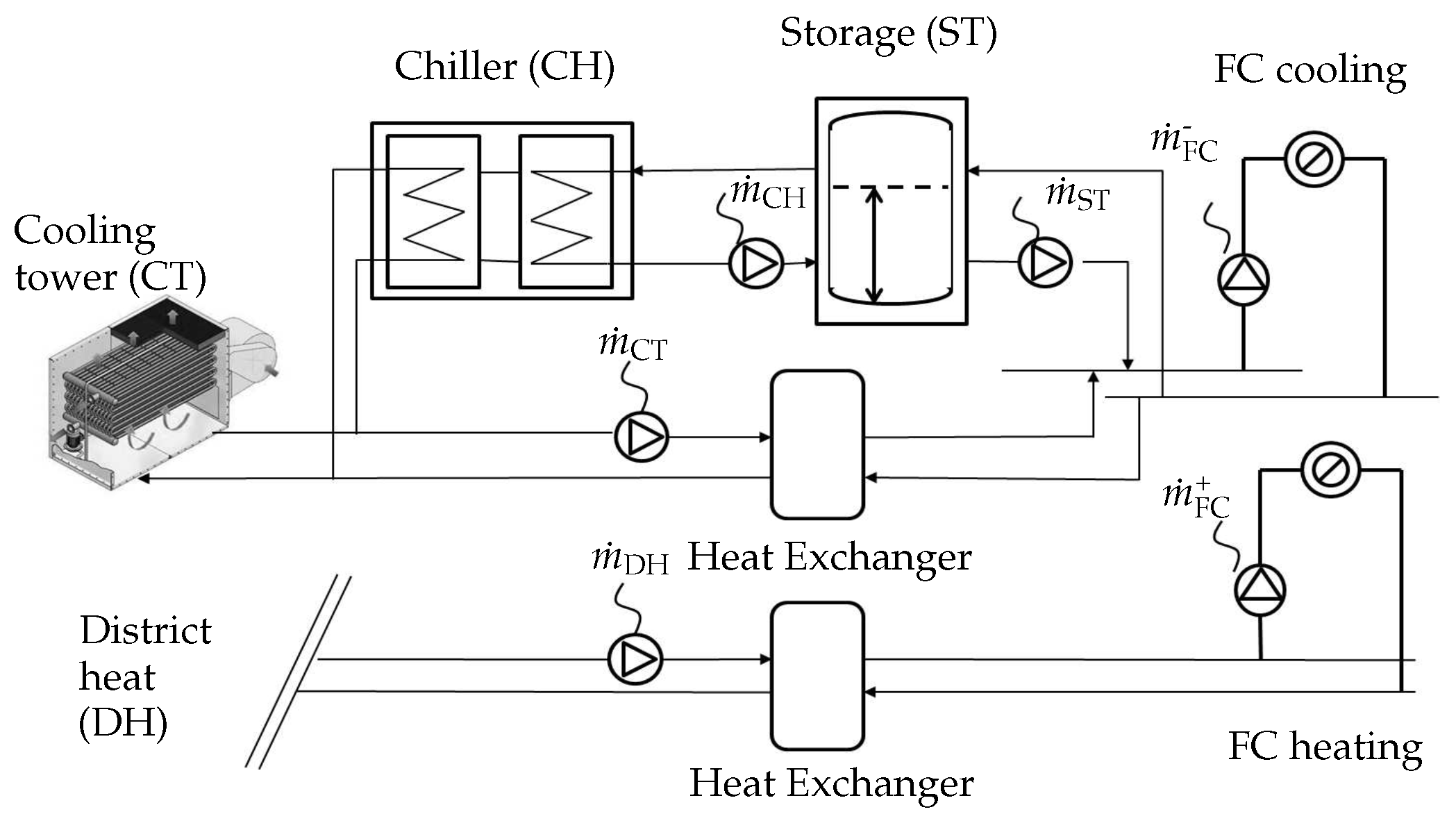
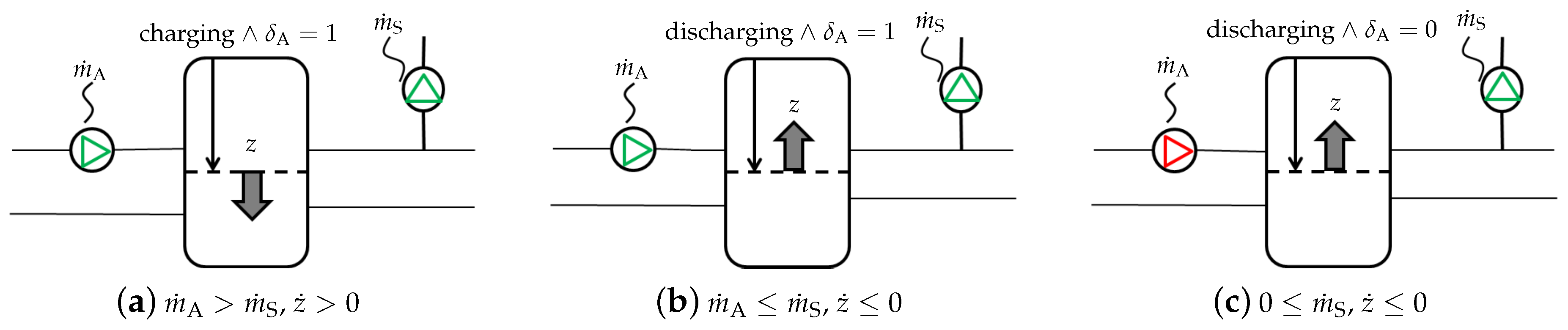
3.3.1. Energy Supply Model
3.3.2. Objective
4. Simulation Results
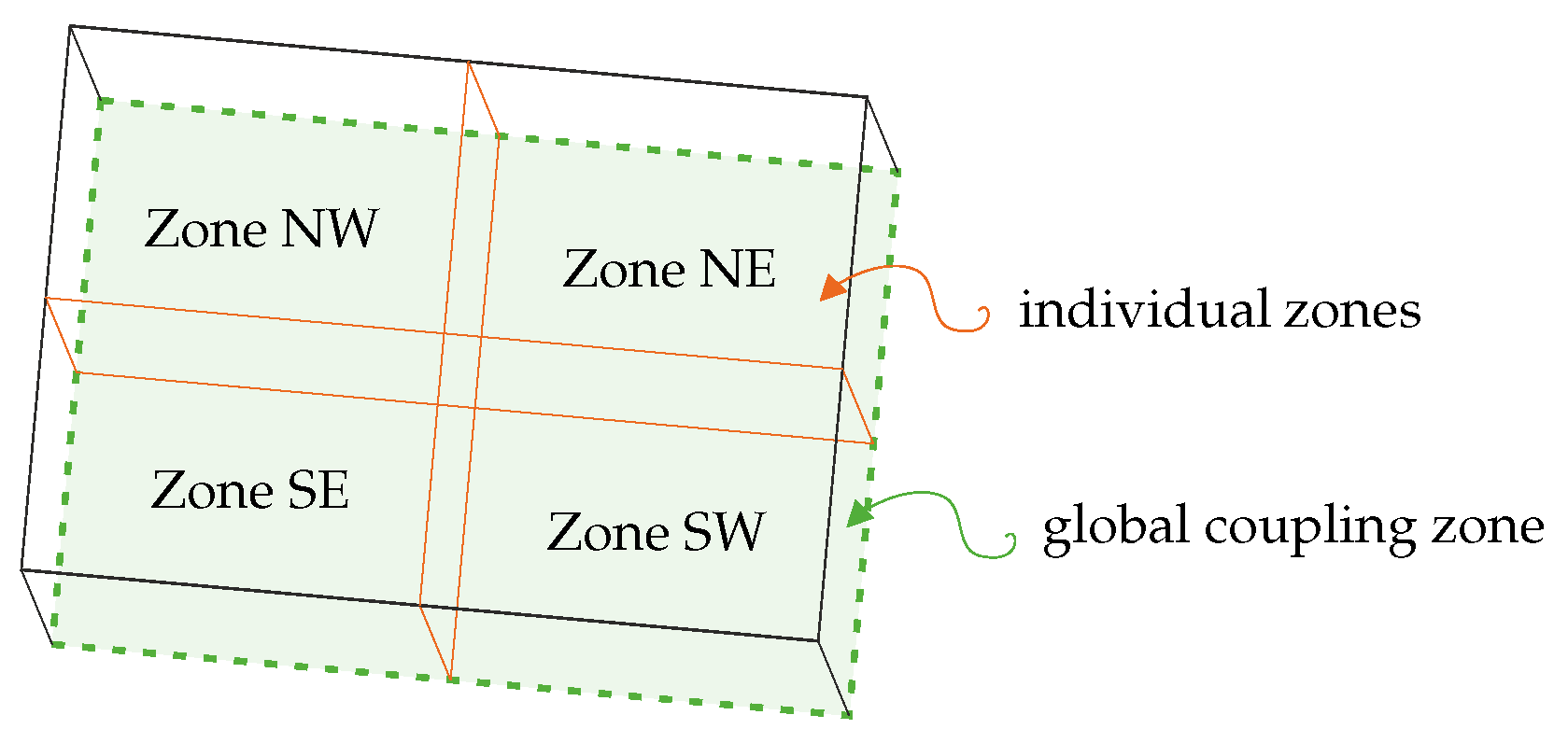
4.1. Demonstration Building
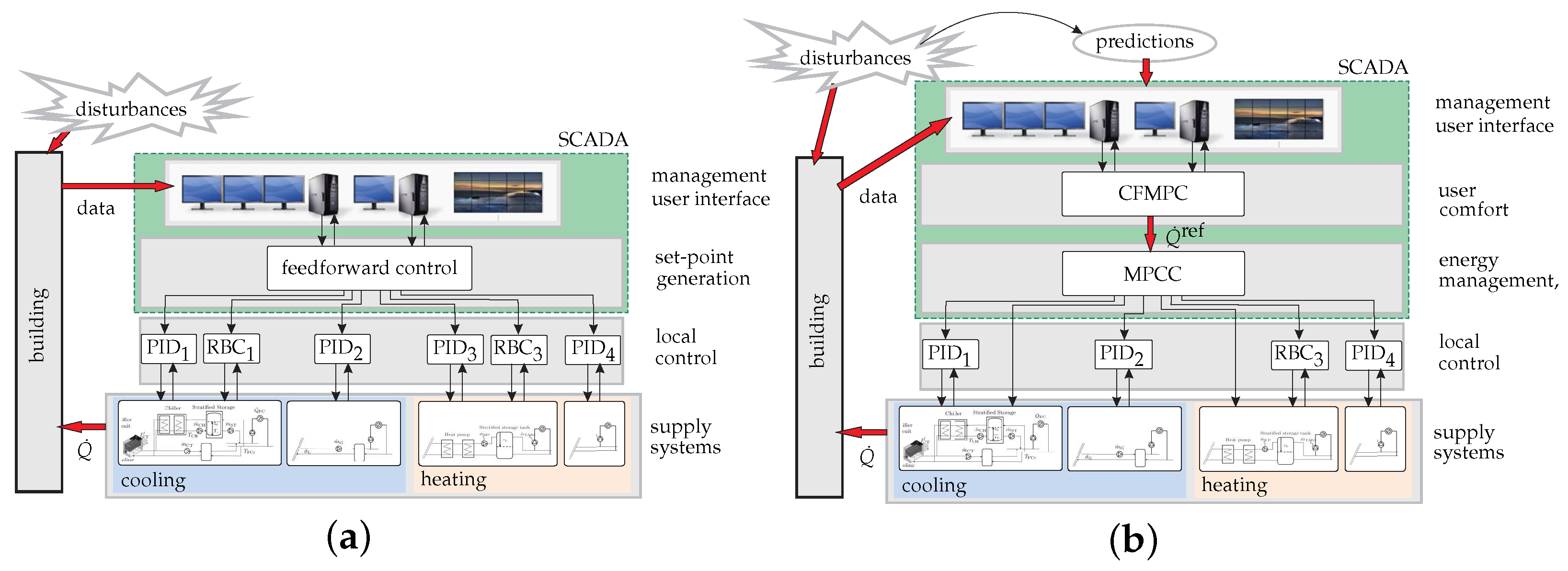
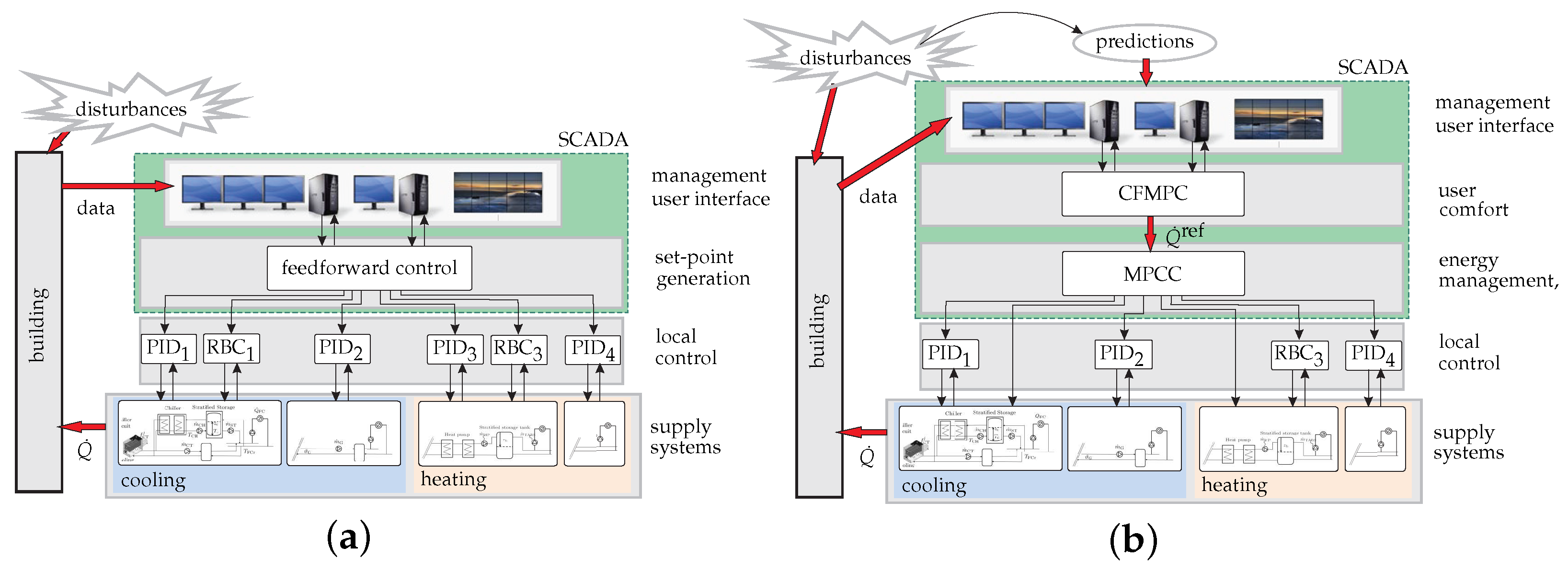
4.1.1. State-Of-The-Art PID Control Structure
4.1.2. HMPC Integration in the Building Automation System
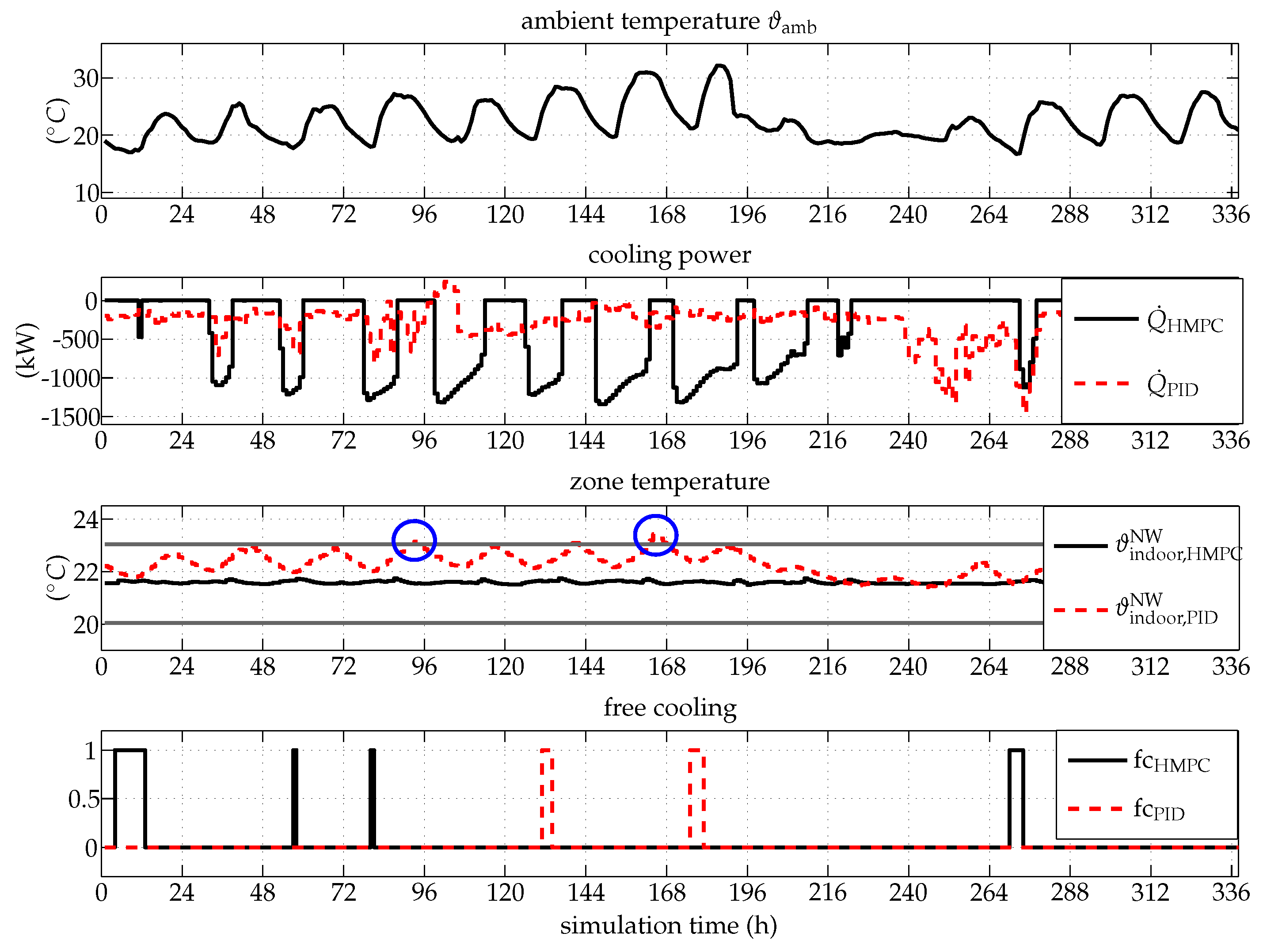
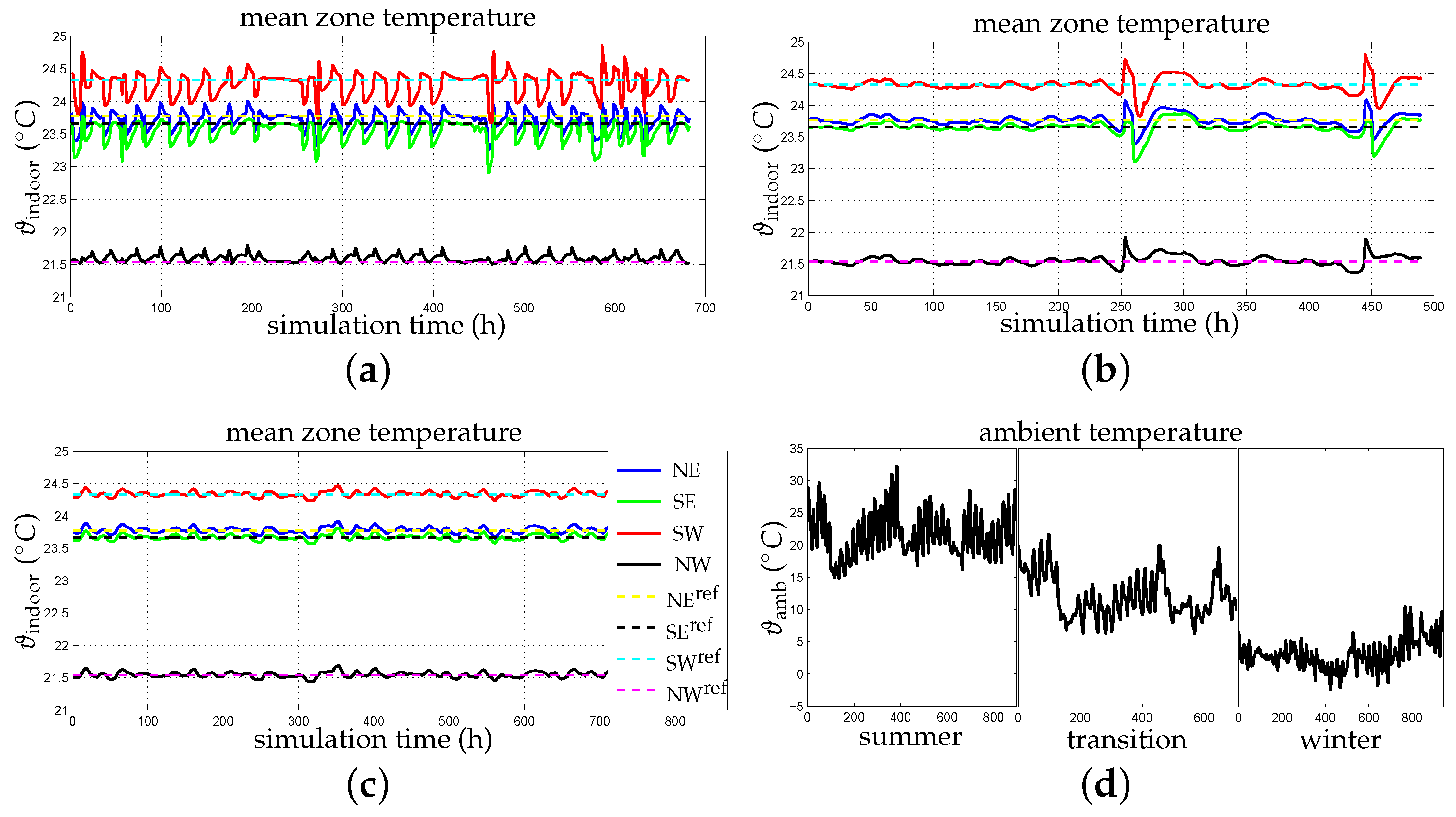
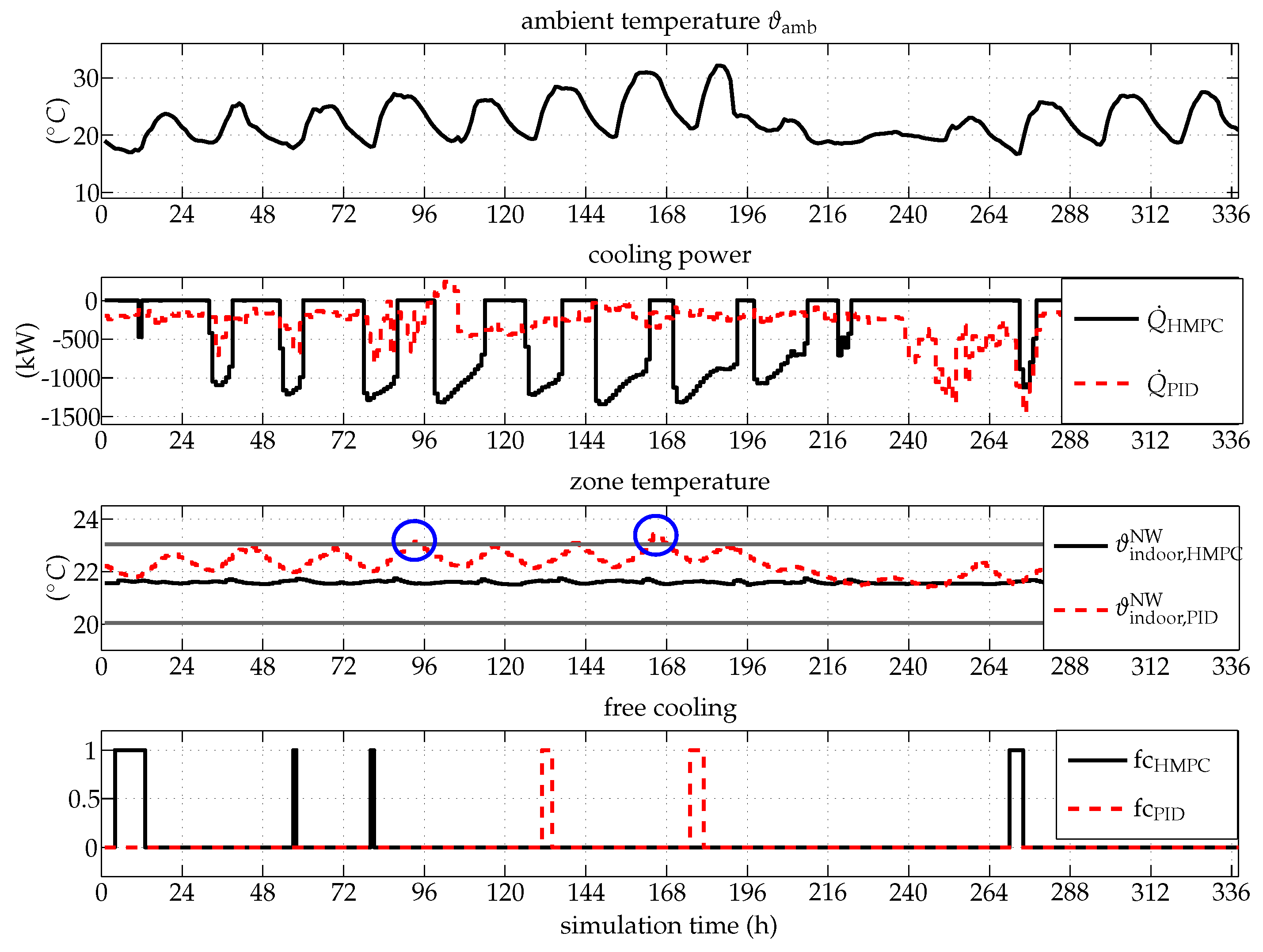
4.2. User Satisfaction
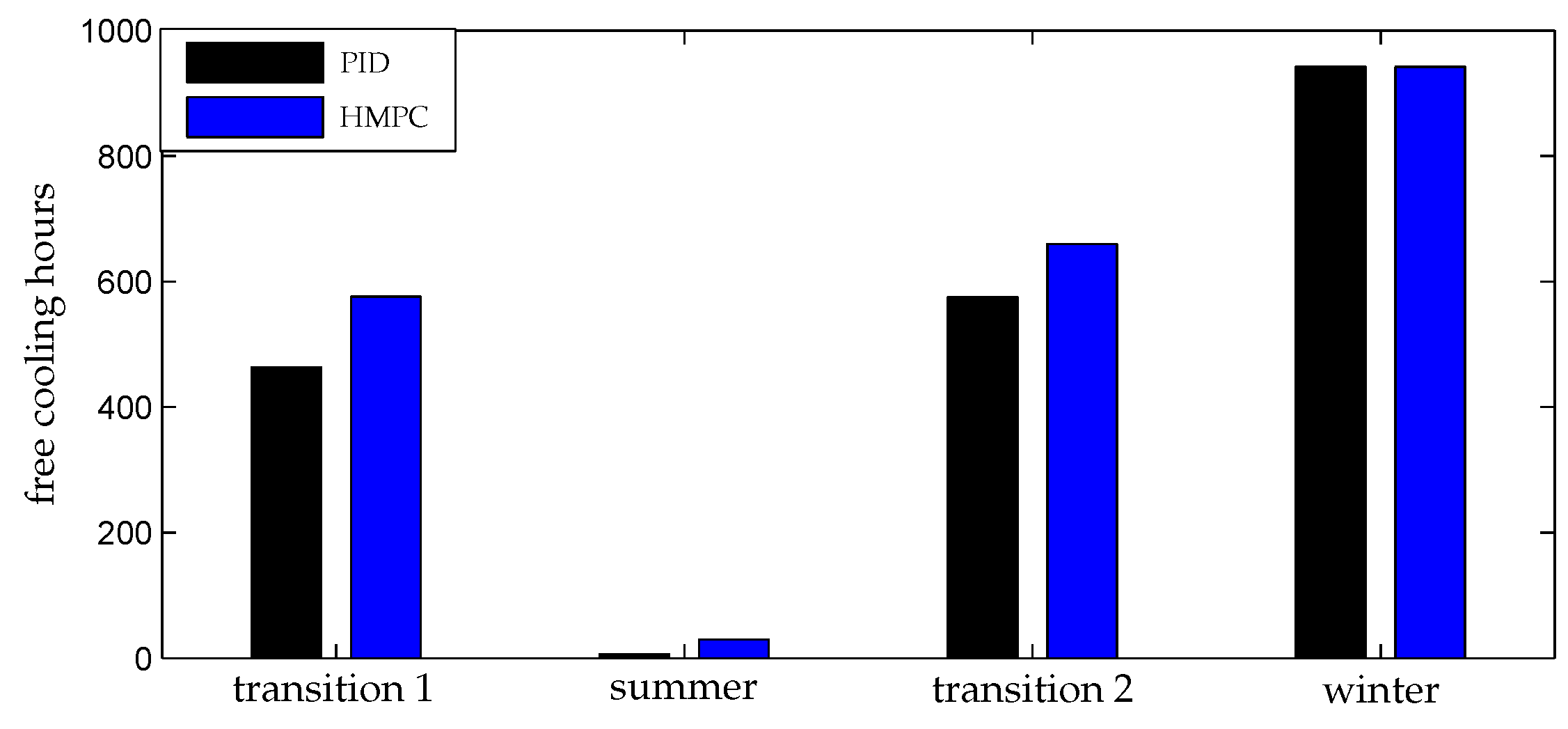
4.3. Energy Efficiency
4.4. Life Cycle Costs
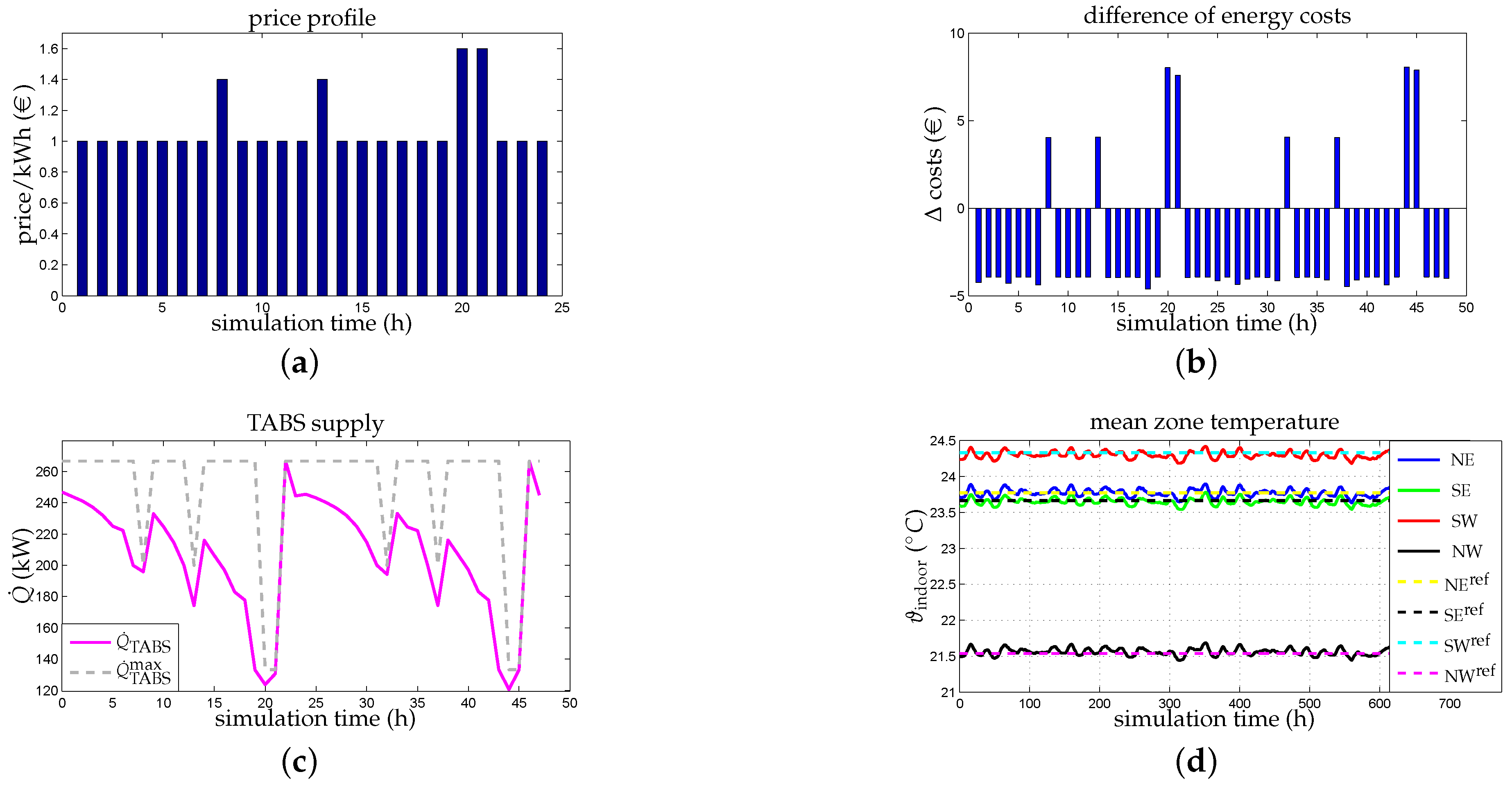
4.5. Flexibility towards the Smart Grid
5. Discussion
5.1. Perspectives
5.1.1. User Perspective
5.1.2. Operator Perspective
5.1.3. Smart Grid Perspective
5.1.4. Investor Perspective
5.2. Possible Obstacles and Necessary Measures
5.2.1. Trained Personnel
5.2.2. Data Acquisition
5.2.3. Hardware Requirements
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- European Commission. “Buildings”. Available online: https://ec.europa.eu/energy/en/topics/energy-efficiency/buildings (accessed on 14 May 2016).
- Khasreen, M.M.; Banfill, P.F.G.; Menzies, G.F. Life-Cycle Assessment and the Environmental Impact of Buildings: A Review. Sustainability 2009, 1, 674–701. [Google Scholar] [CrossRef] [Green Version]
- Waddicor, D.A.; Fuentes, E.; Sisó, L.; Salom, J.; Favre, B.; Jiménez, C.; Azar, M. Climate change and building ageing impact on building energy performance and mitigation measures application: A case study in Turin, northern Italy. Build. Environ. 2016, 102, 13–25. [Google Scholar] [CrossRef]
- Siano, P. Demand response and smart grids—A survey. Renew. Sustain. Energy Rev. 2014, 30, 461–478. [Google Scholar] [CrossRef]
- Bragança, L.; Mateus, R.; Koukkari, H. Building Sustainability Assessment. Sustainability 2010, 2, 2010–2023. [Google Scholar] [CrossRef]
- Dounis, A.I.; Caraiscos, C. Advanced control systems engineering for energy and comfort management in a building environment—A review. Renew. Sustain. Energy Rev. 2009, 13, 1246–1261. [Google Scholar] [CrossRef]
- Maciejowski, J.M. Predictive Control: With Constraints; Pearson Education: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Camacho, E.F.; Alba, C.B. Model Predictive Control; Springer Science & Business Media: Berlin, Germany, 2013. [Google Scholar]
- Oldewurtel, F.; Parisio, A.; Jones, C.N.; Gyalistras, D.; Gwerder, M.; Stauch, V.; Lehmann, B.; Morari, M. Use of model predictive control and weather forecasts for energy efficient building climate control. Energy Build. 2012, 45, 15–27. [Google Scholar] [CrossRef]
- Širokỳ, J.; Oldewurtel, F.; Cigler, J.; Prívara, S. Experimental analysis of model predictive control for an energy efficient building heating system. Appl. Energy 2011, 88, 3079–3087. [Google Scholar] [CrossRef]
- Shahzad, S.S.; Brennan, J.; Theodossopoulos, D.; Hughes, B.; Calautit, J.K. Building-Related Symptoms, Energy, and Thermal Control in the Workplace: Personal and Open Plan Offices. Sustainability 2016, 8, 331. [Google Scholar] [CrossRef]
- Miletic, M.; Schirrer, A.; Kozek, M. Load management in smart grids with utilization of load-shifting potential in building climate control. In Proceedings of the 2015 International Symposium on Smart Electric Distribution Systems and Technologies (EDST), Vienna, Austria, 8–11 September 2015; pp. 468–474.
- Afram, A.; Janabi-Sharifi, F. Theory and applications of HVAC control systems—A review of model predictive control (MPC). Build. Environ. 2014, 72, 343–355. [Google Scholar] [CrossRef]
- Moroşan, P.D.; Bourdais, R.; Dumur, D.; Buisson, J. Building temperature regulation using a distributed model predictive control. Energy Build. 2010, 42, 1445–1452. [Google Scholar] [CrossRef]
- Killian, M.; Mayer, B.; Kozek, M. Cooperative fuzzy model predictive control for heating and cooling of buildings. Energy Build. 2016, 112, 130–140. [Google Scholar] [CrossRef]
- Privara, S.; Cigler, J.; Váňa, Z.; Oldewurtel, F.; Sagerschnig, C.; Žáčeková, E. Building modeling as a crucial part for building predictive control. Energy Build. 2013, 56, 8–22. [Google Scholar] [CrossRef]
- Nelles, O. Nonlinear System Identification: From Classical Approaches to Neural Networks and fuzzy Models; Springer Science & Business Media: Berlin, Germany, 2001. [Google Scholar]
- Ma, Y.; Kelman, A.; Daly, A.; Borrelli, F. Predictive control for energy efficient buildings with thermal storage. IEEE Control Syst. Mag. 2012, 32, 44–64. [Google Scholar] [CrossRef]
- Berkenkamp, F.; Gwerder, M. Hybrid model predictive control of stratified thermal storages in buildings. Energy Build. 2014, 84, 233–240. [Google Scholar] [CrossRef]
- Mayer, B.; Killian, M.; Kozek, M. Management of hybrid energy supply systems in buildings using mixed-integer model predictive control. Energy Convers. Manag. 2015, 98, 470–483. [Google Scholar] [CrossRef]
- Oldewurtel, F.; Jones, C.N.; Parisio, A.; Morari, M. Stochastic model predictive control for building climate control. IEEE Trans. Control Syst. Technol. 2014, 22, 1198–1205. [Google Scholar] [CrossRef]
- Schirrer, A.; Konig, O.; Ghaemi, S.; Kupzog, F.; Kozek, M. Hierarchical application of model-predictive control for efficient integration of active buildings into low voltage grids. In Proceedings of the 2013 Workshop on Modeling and Simulation of Cyber-Physical Energy Systems (MSCPES), Berkeley, CA, USA, 20 May 2013.
- Parisio, A.; Rikos, E.; Tzamalis, G.; Glielmo, L. Use of model predictive control for experimental microgrid optimization. Appl. Energy 2014, 115, 37–46. [Google Scholar] [CrossRef]
- Abonyi, J. Fuzzy Model Identification for Control; Birkhauser Boston: Cambridge, MA, USA, 2002. [Google Scholar]
- Takagi, T.; Sugeno, M. Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Syst. Man Cybern. 1985, SMC-15, 116–132. [Google Scholar] [CrossRef]
- Killian, M.; Mayer, B.; Kozek, M. Effective fuzzy black-box modeling for building heating dynamics. Energy Build. 2015, 96, 175–186. [Google Scholar] [CrossRef]
- Mayer, B.; Killian, M.; Kozek, M. Modular Model Predictive Control Concept for Building Energy Supply Systems: Simulation Results for a Large Office Building. In Proceedings of the EUROSIM, Oulu, Finland, 12–16 September 2016.
- Mayer, B.; Killian, M.; Kozek, M. A branch and bound approach for building cooling supply control with hybrid model predictive control. Energy Build. 2016, 128, 553–566. [Google Scholar] [CrossRef]
- Gurobi Optimization. Gurobi Optimizer Reference Manual; Gurobi Optimization, Inc.: Houston, TX, USA, 2016. [Google Scholar]
- Chang, W.K.; Hong, T. Statistical analysis and modeling of occupancy patterns in open-plan offices using measured lighting-switch data. Build. Simul. 2013, 6, 23–32. [Google Scholar] [CrossRef]
- Oldewurtel, F.; Sturzenegger, D.; Morari, M. Importance of occupancy information for building climate control. Appl. Energy 2013, 101, 521–532. [Google Scholar] [CrossRef]
- Sturzenegger, D.; Gyalistras, D.; Morari, M.; Smith, R. Model predictive climate control of a swiss office building: Implementation, results, and cost-benefit analysis. Control Systems Technology. IEEE Trans. Control Syst. Technol. 2015, 24, 1–12. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Summer | Transition | Winter | ||||
|---|---|---|---|---|---|---|
| Costs | MAE | Costs | MAE | Costs | MAE | |
| 0.1 | 4.4253 | 2.28 | 1.63540 | 0.26 | 2.0305 | 0.014 |
| 0.5 | 4.4266 | 2.27 | 1.63542 | 0.25 | 2.0302 | 0.002 |
| 0.9 | 4.4267 | 2.26 | 1.63929 | 0.22 | 2.0340 | 0.000 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mayer, B.; Killian, M.; Kozek, M. Hierarchical Model Predictive Control for Sustainable Building Automation. Sustainability 2017, 9, 264. https://doi.org/10.3390/su9020264
Mayer B, Killian M, Kozek M. Hierarchical Model Predictive Control for Sustainable Building Automation. Sustainability. 2017; 9(2):264. https://doi.org/10.3390/su9020264
Chicago/Turabian StyleMayer, Barbara, Michaela Killian, and Martin Kozek. 2017. "Hierarchical Model Predictive Control for Sustainable Building Automation" Sustainability 9, no. 2: 264. https://doi.org/10.3390/su9020264