1. Introduction
Recent research and demos have demonstrated that driverless vehicles are able to drive safely in the majority of common road scenarios worldwide. This trend is encouraging further investments from industry and public administrations in order to make autonomous driving technologies available to everyone. However, more efforts are required to meet the demand for higher performance and safety; for example, in a recent report [
1], Google claimed that in 2015, their cars experienced 272 failures and would have crashed at least 13 times if their human test drivers had not intervened, driving between 30,000 and 40,000 miles per month. Further failures are documented by all the other manufacturers working in this sector, including a casualty during an Uber test in Arizona in March 2018 [
2].
Public transportation can strongly benefit from the introduction of intelligent vehicles as they can improve safety in urban areas, reduce the cost for the last-mile transportation, decrease congestion and improve the global service for the user. Although autonomous vehicle technology is not completely mature yet, it has been attracting economic and industrial interests for years, to such an extent that commercial cars include increasing levels of advanced driver-assisting systems year after year. On the one hand, the social implications of such a huge revolution will change our way of seeing the transportation systems, hence increasing the quality of our lives. On the other hand, vehicles will have to be equipped with a large number of sensors that are still expensive, and most importantly, safety and reliability are mandatory, but still open requirements. Moreover, the impact of driverless vehicles on cities could result in both positive consequences and negative side effects [
3]. The automated mobility will be safer and more accessible for those who cannot drive themselves or do not own a car, following the Mobility as a Service (MaaS) paradigm (no need for vehicle ownership). Under the upright policy, the vehicle automation will support public transit, as well as decrease housing development costs, especially due to the elimination of expensive underground garages and space-wasting on-ground parking. Therefore, there will be higher chances for building affordable urban housing. However, if regulations are depraved, the ubiquitous automated mobility could lead to numerous side effects, i.e., the growth of traffic congestion, obesity, urban sprawl or reduced mass public transit use.
Following these objectives, research and industry are working on improving the global performance of vehicles more and more, and today, fully-autonomous cars are just one step away from market and worldwide diffusion. In the event of their imminent market entry, many countries in the world are preparing their legislation for the road circulation of autonomous cars. Moreover, public authorities have to deal with the transition to new modes of transportation and shared mobility, improving regional planning and modelling, roads’ management and operations, automated vehicle human factors, near-term deployment opportunities, automation systems’ operational requirements and the street infrastructure needs of connected-automated vehicles. Once autonomous buses become legally standardized and commercially available, they could serve locations currently served by privately-owned vehicles only, but the majority of these issues are still not completely solved. As long as these and other crucial questions remain unanswered, the public administration will be hampered in its ability to successfully plan for and introduce automated buses into the transportation system.
The report first describes the motivation to implement automated vehicles in the public transport system (
Section 2). Then, in
Section 3, it shows that there are different models of automated mobility. Further, in
Section 4, an overview of ongoing and future automated mobility pilots is given. After that, it goes into further detail discussing the technological background of automated driving, in
Section 5, outlining the necessary specifications of the routes and vehicles involved in automated mobility pilots, reported in
Section 6. The study is concluded with a thorough discussion on the regulatory framework of automated mobility,
Section 7, with a special focus on civil liability,
Section 8, and important safety and standardization issues addressed in
Section 9.
2. Motivation
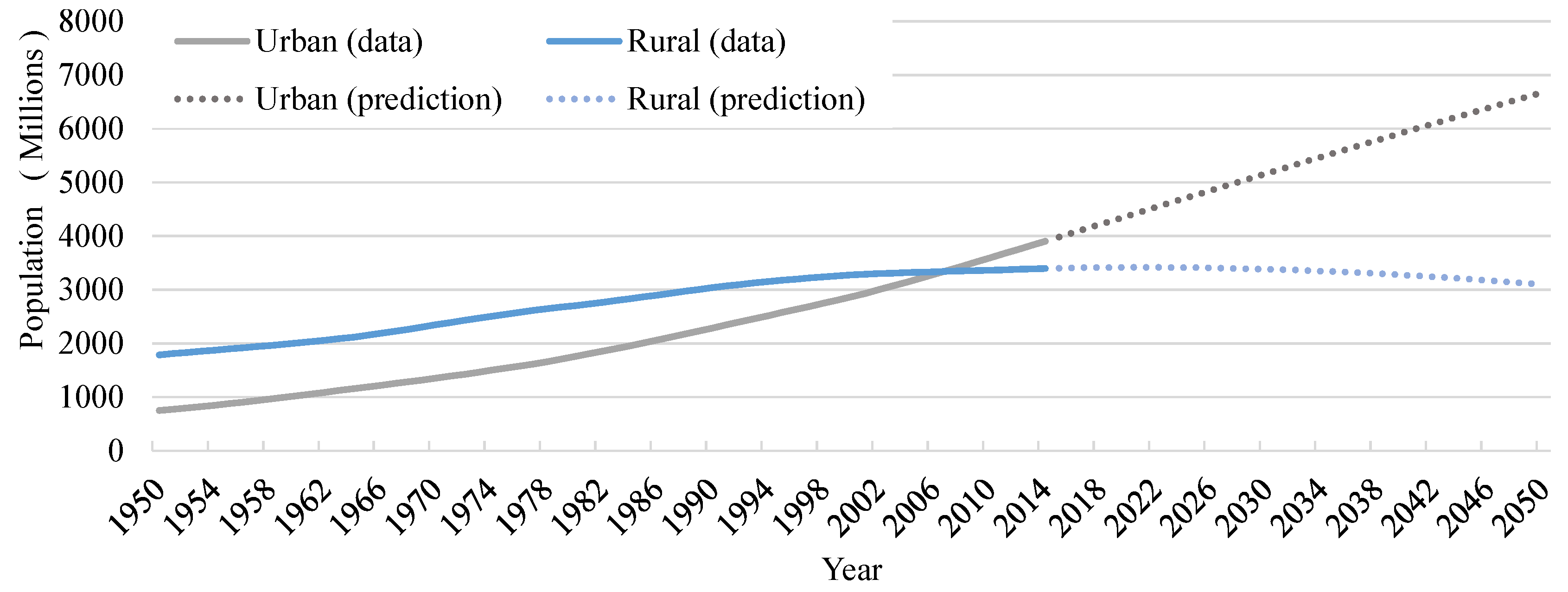
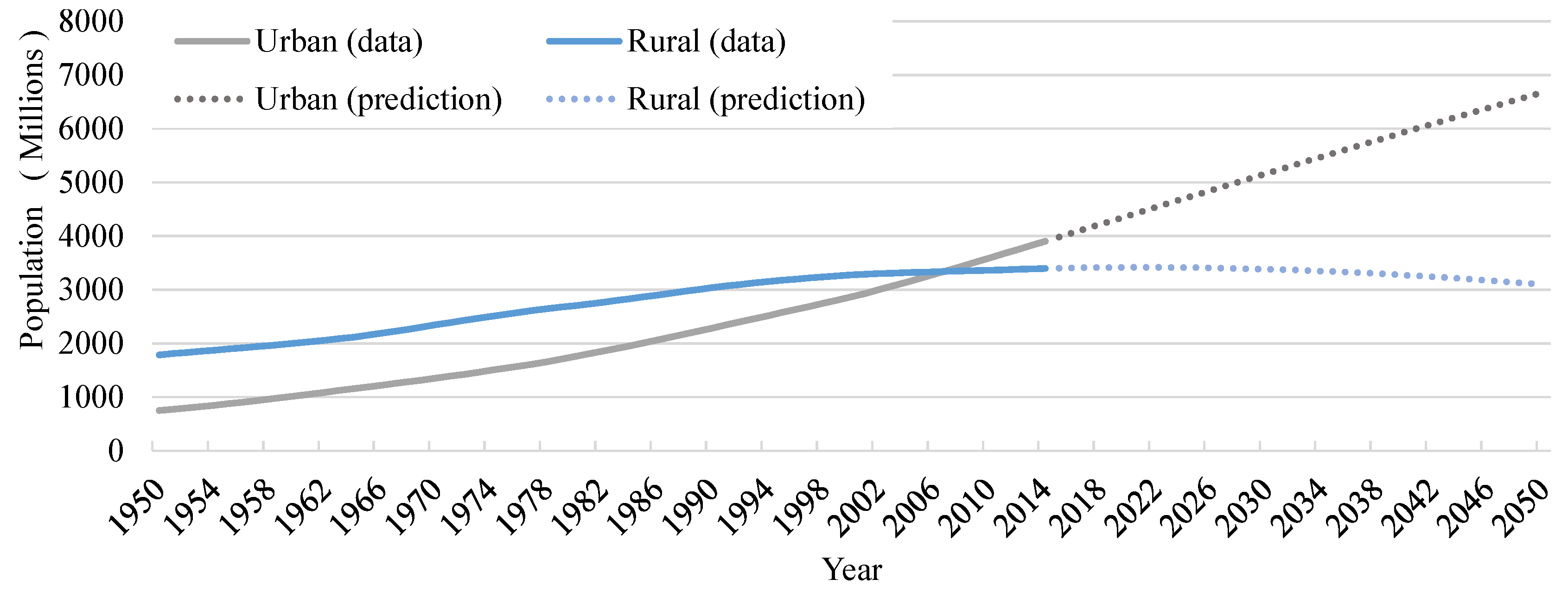
According to a study of the Department of Economic and Social Affairs of the United Nations (UN DESA, 2015 [
4]), two thirds of the world population will be living in urban areas by the year 2050 (
Figure 1). This will result in an increase of 2.5 billion people living in urban areas, also taking into account the world population growth. The sheer number of inhabitants, together with economic growth, will lead to an increasing need for effective modes of urban transport in terms of energy and costs.
The availability of space-efficient and affordable modes of transport for inhabitants is fundamental to ensure the full accessibility to urban areas. Densely-populated cities are strongly dependent on high capacity trunk lines to be able to sustain the necessary traffic flow rates required to meet the travel demand. As trunk lines are not directly accessible by the whole population in any area, additional more flexible first- and last-mile solutions are required to feed and complement the aforementioned trunk lines.
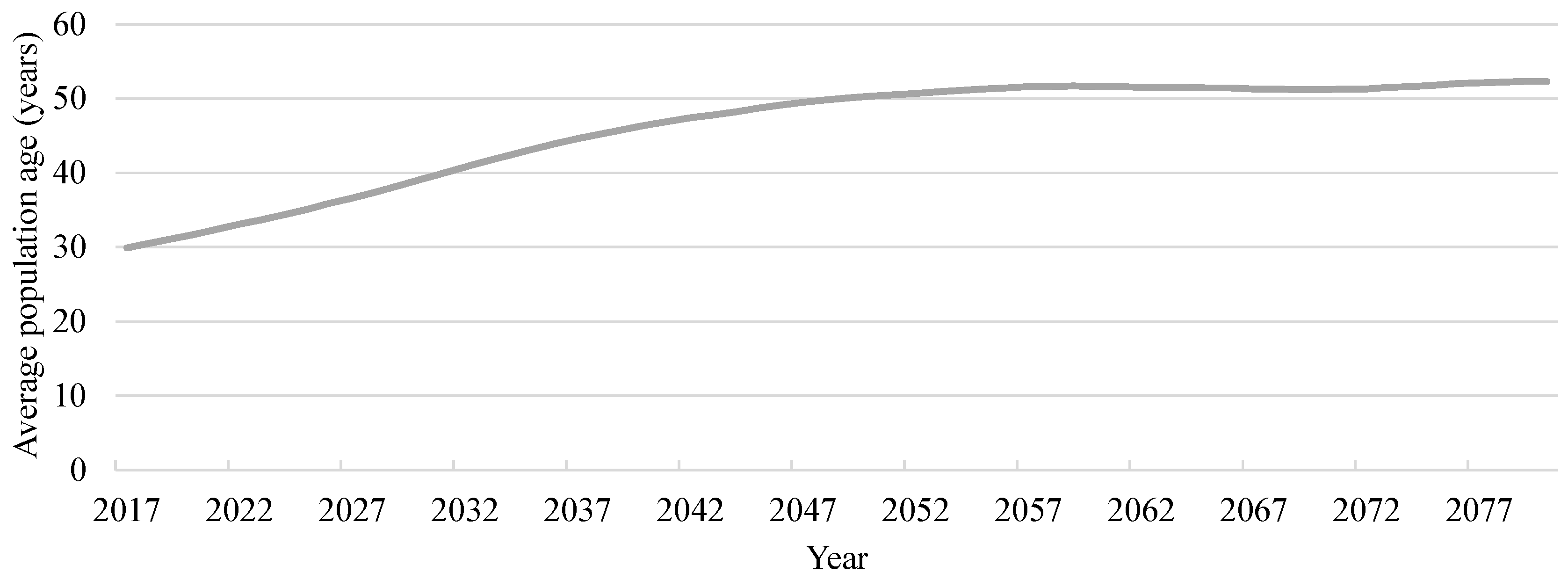
While the world population is growing rapidly, the trend in Europe is slower. The low growth rate leads to an ageing population, and Eurostat predicts the old-age dependency factor to increase in the EU-28 countries from 29.3% in 2016 to 50% in 2050 (
Figure 2) (Eurostat, 2018) [
5].
Increasing automation is seen as one of the leading solutions to compensate the relative decrease in available workforce. The trend will also cause the traffic patterns to shift away from regular morning and evening peak hours, to more steady traffic around the clock as the significance of work trips declines. If successfully deployed, automated minibuses and similar automated vehicles can provide flexible and cost-efficient solutions for serving both peak and off-peak demand parallel to the trunk lines.
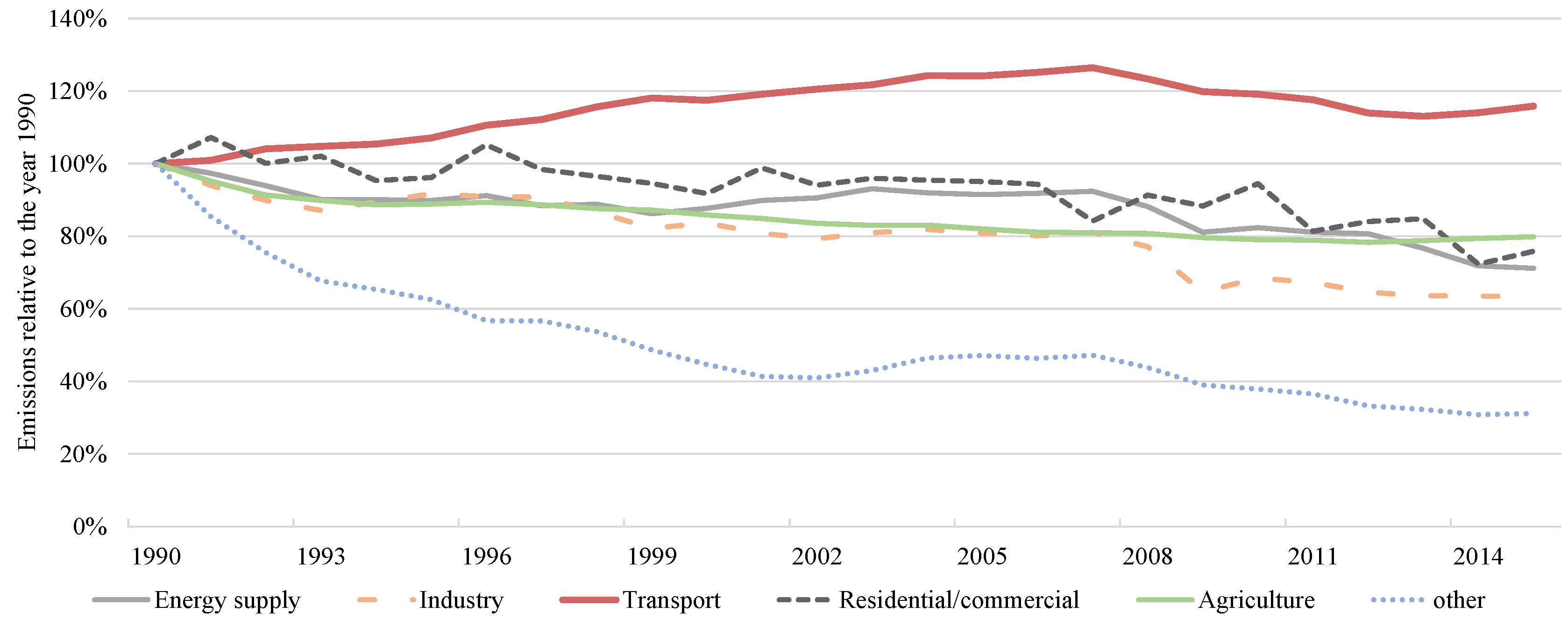
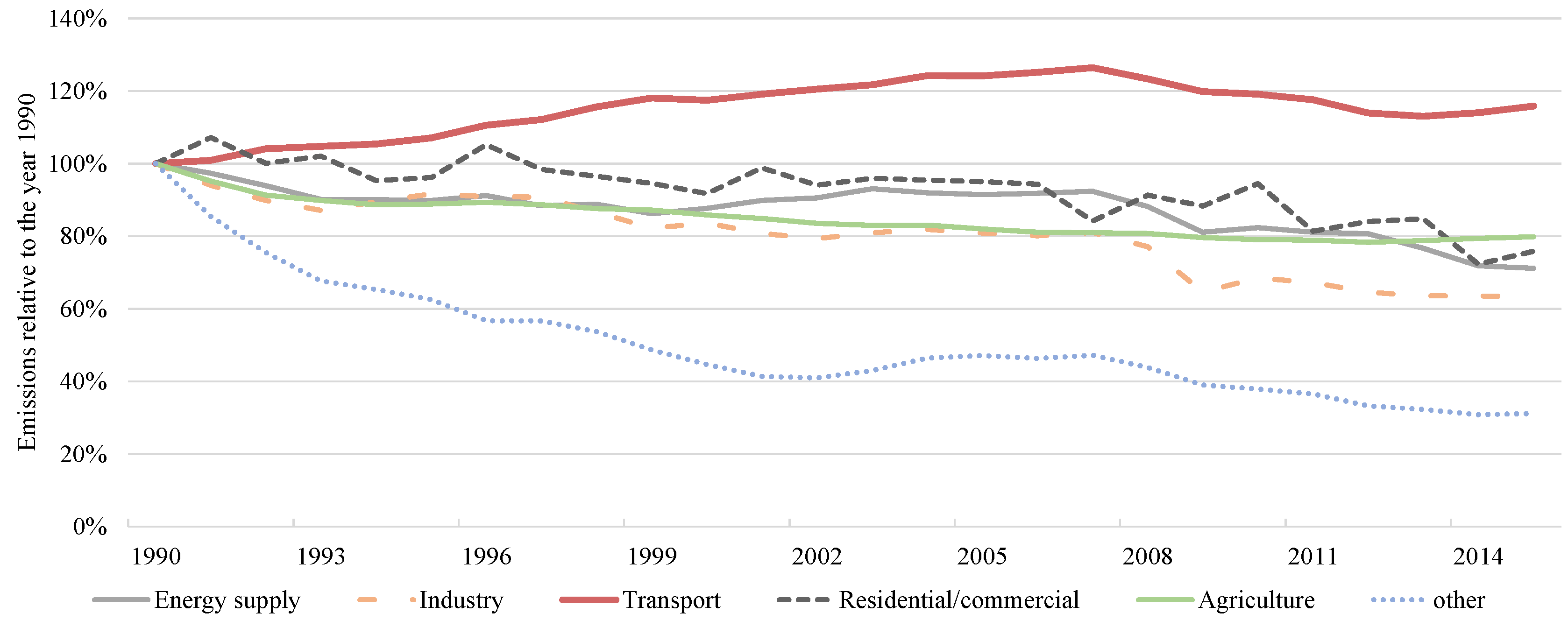
From the environmental point of view, it is important to underline that the EU has set a target to drop greenhouse gas emissions from transportation by 60% from 1990 levels. Currently, the transport sector accounts for almost a quarter of the greenhouse gas emissions in the EU, and the reduction in this sector has been less successful than in other sectors (European Commission, 2016) [
6]. Electrification of road transport is seen as one of the most important steps toward carbon-free transportation. The use of electric power will create high flexibility in terms of primary energy source and fostering full utilization of sustainable sources. In addition, electrified vehicles can operate indoors, offering new opportunities for innovation in city planning and transport routing.
Autonomous public transport and new mobility services will increase the freedom to choose the most suitable mobility mode for each individual trip. By providing a wider palette of mobility solutions, the users can lower their dependency on private cars and start using a wider spectrum of services. This can improve the resource efficiency and have a strong self-reinforcing effect on the popularity of the mobility services, walking and biking.
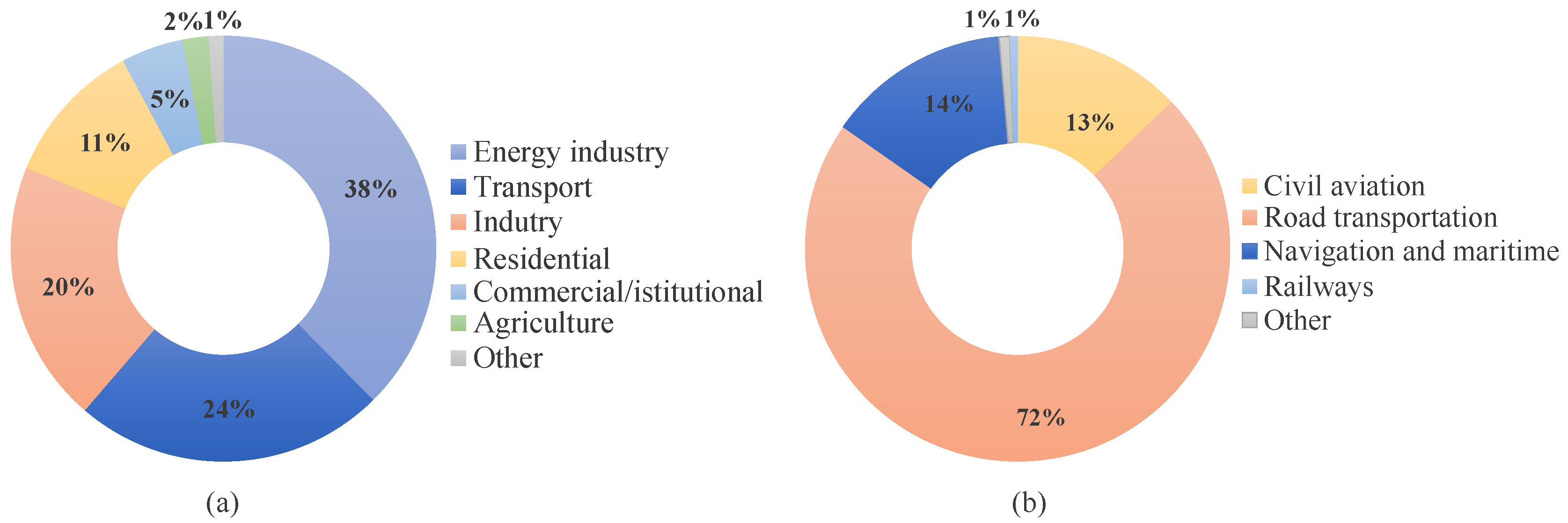
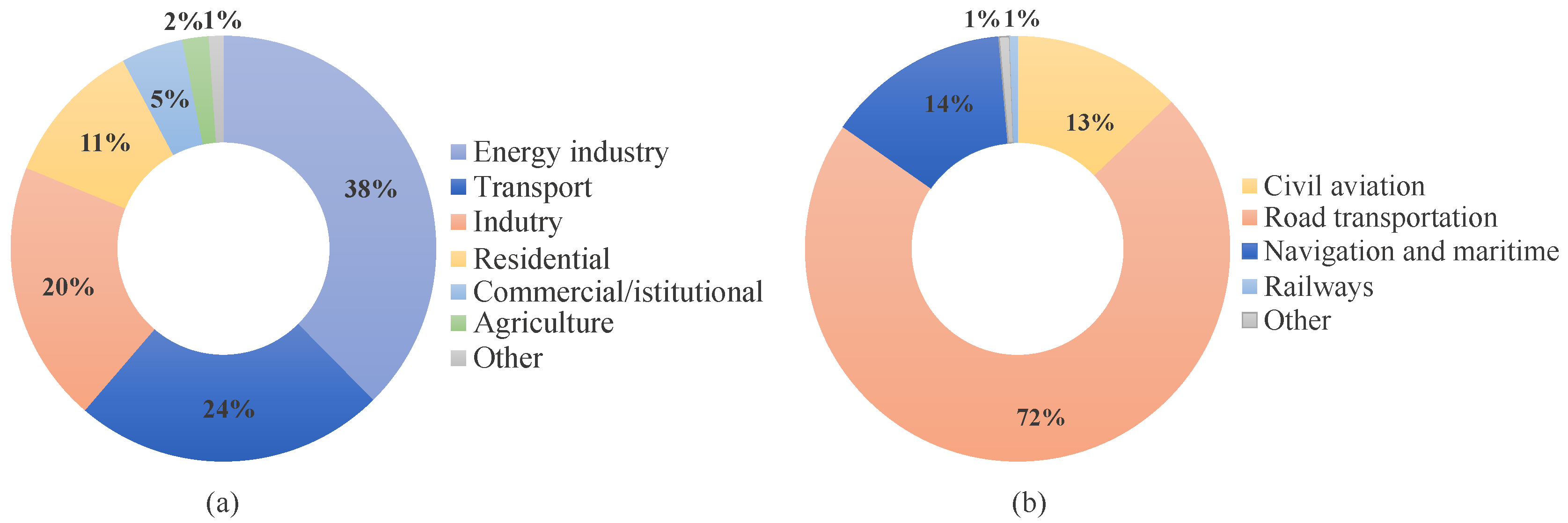
According to a report from the European Environmental Agency [
7], road transport is one of the main polluting factor in cities (
Figure 3), and electric vehicles will help to dramatically reduce local emissions, including noise, particulates and other air pollutants in densely-populated areas. Indeed, road transport is responsible for emitting over one billion tonnes of CO
2 annually, which accounts for about 24% of global greenhouse gas emissions (see
Figure 4). Even more relevant is the amount of SOx and NOx emissions [
8,
9].
Indeed, a Euro 5 diesel passenger car’s NOx emissions range between 430 and 810 mg/km in real driving conditions. This clearly shows the necessity of moving from private car-based transportation to public-based electric transportation.
For private vehicles, advances in self-driving technology will improve the quality of the provided service with the final vision to enable the population without a driver’s license, e.g., under-aged people, to access a car. The induced demand, wider user base and the vehicles driving without passengers will increase the number of cars on the streets [
3,
10]. Although wide utilization of AVs (Autonomous Vehicles) and connected vehicles can help to significantly increase road capacity, the rapid inflow of new vehicles can, in some scenarios, lead to severe congestion.
In order to remain competitive, public transportation should be at the forefront of technological development. With correct planning and policies, communal AVs can help to improve mobility, leading to improved user experience and reducing the number of vehicles in urban areas.
According to the survey distributed by the U.S. Department of Transportation (National Motor Vehicle Crash Causation Survey, 2008) [
11], the critical reason for accidents was attributed to the driver in a large proportion of the cases. Causes of crash include failure to recognize the traffic situation correctly, poor driving decisions or driver performance drop. Sophisticated vehicle automation, while not perfectly safe, can help to mitigate or eliminate most of the ‘human errors’ related to driving and lead to a safer traffic flow for everyone.
3. Variety of Automated Mobility
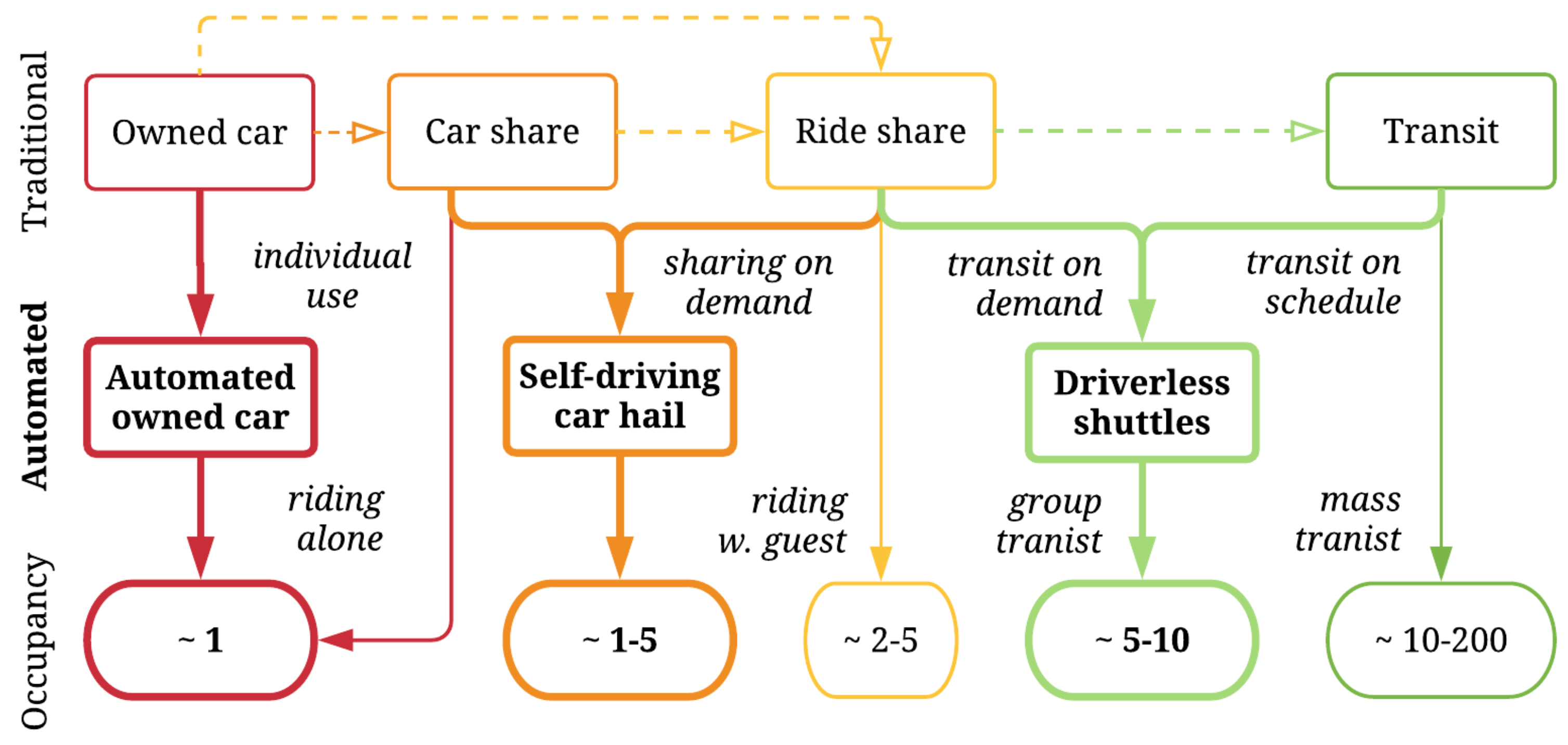
Driverless shuttles (or autonomous minibuses) belong to the emerging group of automated mobility solutions [
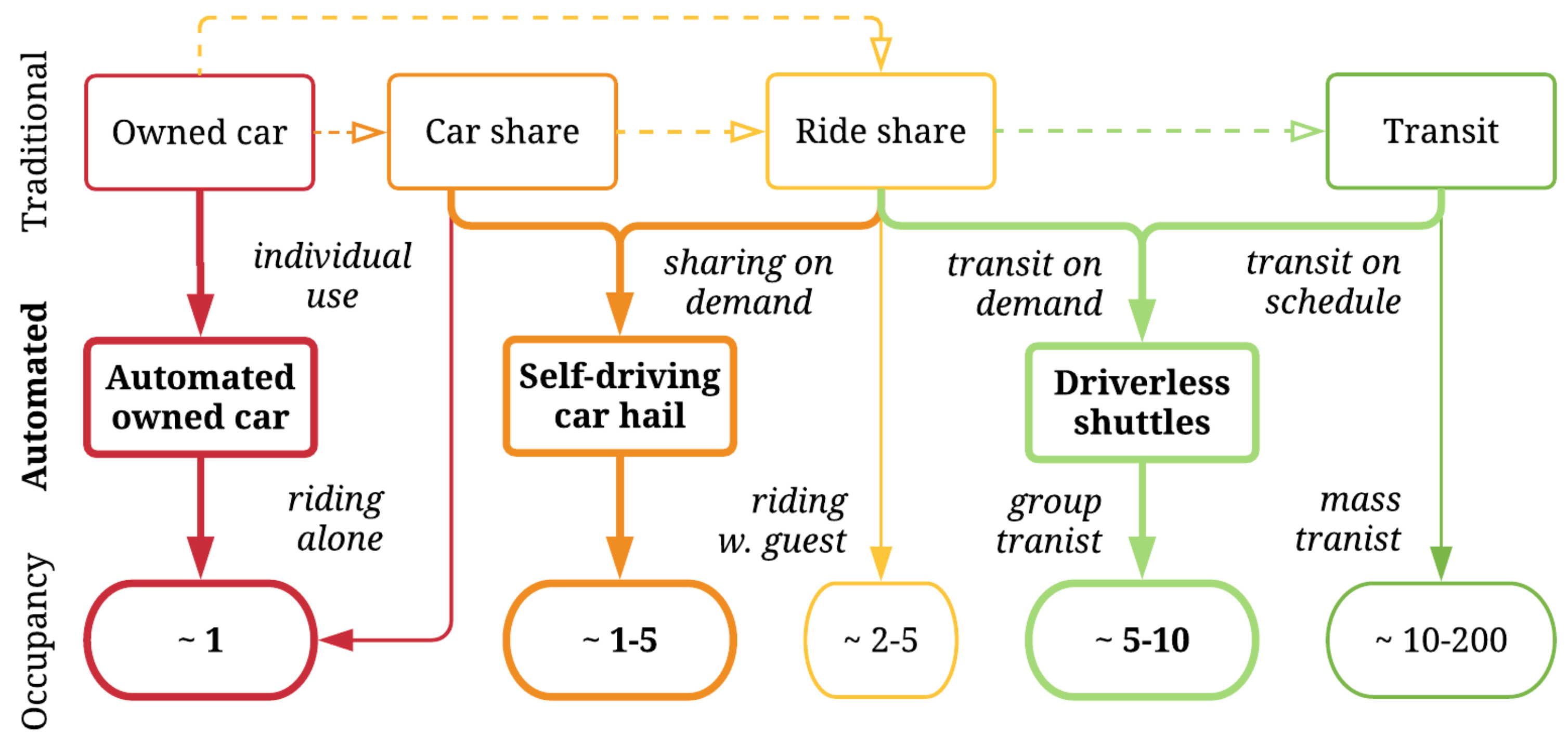
12]. There are several differences between the traditional over 100-year old mobility and emerging automated solutions that may revolutionize riding and commuting (
Figure 5):
due to the absence of a driver, the ridesharing/carpooling (Blablacar)/ride-hailing/sourcing (TNC (Transit Network Companies): e.g., Lyft, Uber, taxi) merges with car-sharing (yet, we can still share a ride in the shared car);
mass transit, due to automation, may be more effective for travelling more frequently with less passengers, as well as being able to work in the on-demand mode; thus, it is a more populated version of driverless car share, a driverless shuttle (or minibus);
the self-owned and self-ridden car does not change much; instead of a revolution, we will have an evolution of the traditional car, which already can break, park or keep the line autonomously.
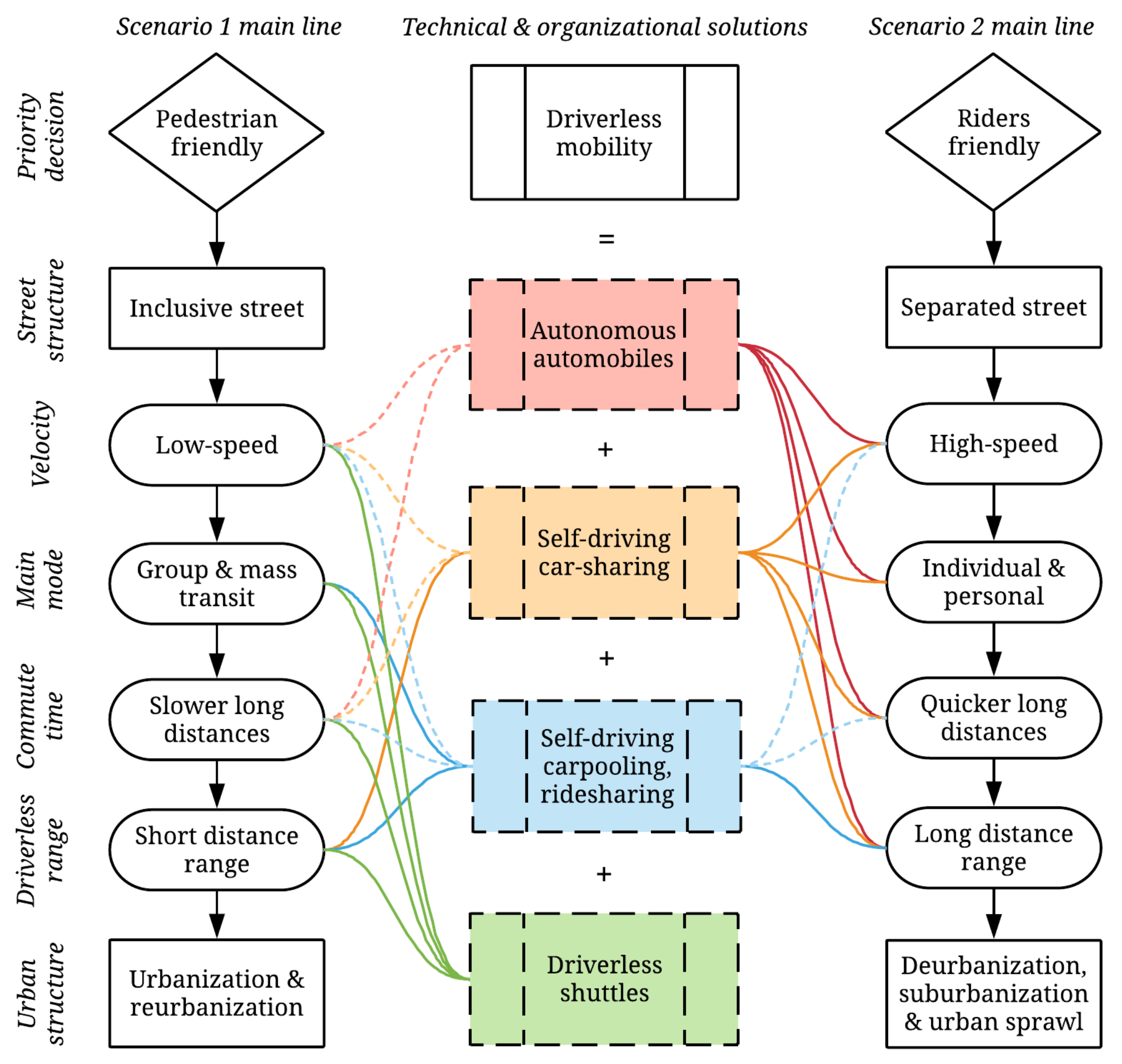
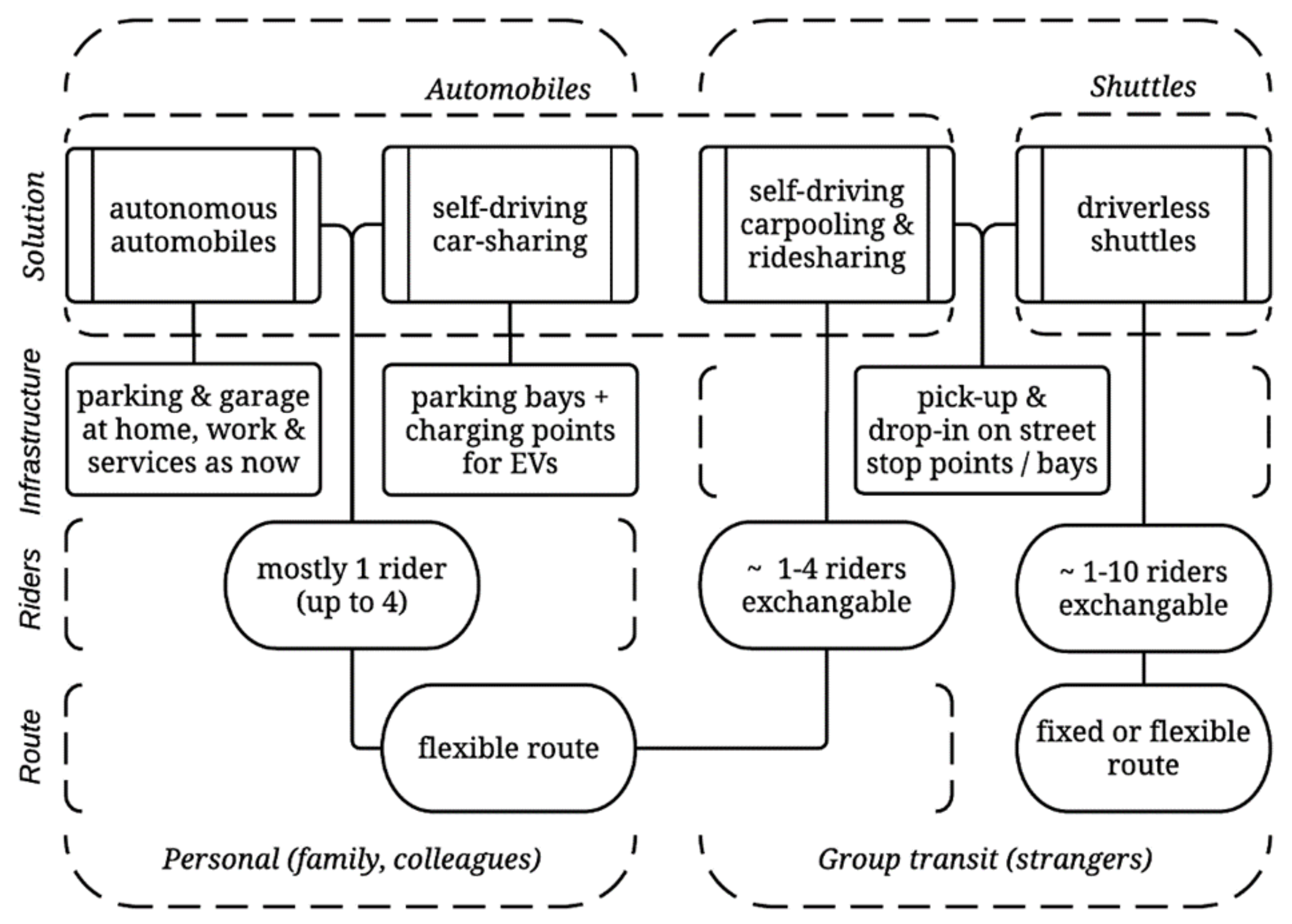
Following previous comparison, it is possible to distinguish four technical and organizational automated mobility solutions (actually three, considering merging of the two middle solutions into one) presented in
Figure 6. These are: autonomous automobiles, self-driving car-sharing and ridesharing or carpooling (both merging into one solution: self-driving, car-on-demand) and driverless shuttles. Of course, one can name them differently, and we will possibly see in the next decades which names emerge and which become popular during their diffusion in society.
It is worth mentioning that one can easily access a driverless vehicle for transportation without ownership, thus making travelling easier, not only for drivers, but also for people who are unable to drive. That also makes using a car more popular with all its positive and negative consequences. A self-driving car-on-demand is a less expensive and more efficient travel mode, but the question arises: who will share the car: previous car users or transit commuters? Thus, it could also have negative impacts, reducing the number of public transit users.
Yet, the transportation authorities could introduce driverless shuttles (autonomous minibuses), which can compete with automobiles by price and be more effective than traditional mass transit, taking 10 instead of 150 passengers, being on-demand instead of on-schedule, and moving on flexible routes instead of fixed routes, as well as being the first- and the last-mile connection to mass transit.
Thus, one can consider two edge-scenarios concerning the diffusion of each technical and organizational automated mobility solutions: the first is the pedestrian-friendly scenario, which results in street inclusiveness (emerging shared-street paradigm, like the Dutch “Woonerf” [
13]). The second is the rider-friendly scenario, which results in separated lines of various modes of transportation and the velocity of movement (continuation of the old 20th Century modernists’ road paradigm). Clearly, the diffusion of each solution and the emergence of any single scenario will depend the one on the other: it is a relation of two and a constant process. Therefore, it is important to remember that there are infinite possibilities between both presented approaches, and the final scenario could also emerge somewhere in between, depending on how close the edge would be.
Figure 7 presents also spatial consequences: the pedestrian-friendly scenario results in a sustainable urban development. On the other hand, the rider-friendly scenario results in sub-urbanization and urban sprawl.
However, will the automated mobility lead to an increased urban sprawl? It will probably depend on consumers’ decisions, also based on automotive industry advertising, as much as on public authorities’ policy (politicians, transportation and urban planners). If municipalities were decide to promote a so-called “smart growth” by investing in driverless micro transit and in the reduction of parking, Scenario 1 will emerge. If automotive manufacturers were not to have competitors of self-owned autonomous automobiles, Scenario 2 will possibly emerge.
4. Automated Bus Pilots
The aim of this section is to provide an overview of ongoing automated driving pilots, especially in Europe, and to provide an understanding of common issues and concerns associated with such tests, and how they contribute to the deployment of viable solutions. The study will focus on how to leverage insights gained by others and discuss areas where experience, knowledge and result exchange would be helpful for large-scale tests.
The number of autonomous shuttle pilots has increased rapidly over the last few years. These pilots have started to draw interest in various cities, universities and private companies. However, the objectives of the pilots may vary. In Europe, the autonomous shuttle pilots aim mostly to integrate themselves into the public transportation system. Switzerland, instead, is the most advanced country at the moment, as it has implemented autonomous shuttles in their public transport systems with regular timetables. Outside of Europe, the pilots are still mostly about testing the technology and circumstances, or looking at the people’s standpoint on autonomous vehicles. One of the biggest concerns, along with the technology performance, is to see how people accept autonomous shuttles. Legislation is also something that affects the success of pilot projects and therefore, some of these pilots are carried out in private areas, where the conditions are rarely comparable to real scenarios.
Table 1 contains detailed information about pilots that have been performed in open public roads with passengers, whereas in the following, a summary for each relevant pilot is reported, including additional information according to the availability of sources. Most autonomous shuttles operate with a speed of 12 km/h, but some might go a little bit faster, reaching 20 km/h. It should be noted that the overall documentation of the autonomous shuttle pilots is insufficient to provide a complete framework; hence, the following information is to be considered as a rough review of the current situation.
Bad Birnbach, Germany
This pilot transfers passengers from the town centre to the spa area. The route is planned to be extended from the spa to the train station. Deutsche Bahn, the rail operator of Germany, is also planning to expand the operation of autonomous shuttles throughout the country.
Berlin, Germany
In Berlin, the Charité hospital campus and BVG, Berlin’s public transit service, have launched a joint autonomous shuttle pilot from March 2018 onwards. The pilot consists of two routes aiming to carry students, patients and co-workers. For the first year, the shuttles will have an operator on board at all times, but from 2019 onwards, the shuttles are planned to travel without a member of the staff on board. The aim of the pilot is to study the effect of the introduction of autonomy on the use of the public transport, increasing the number of people using the service. The partners are also hoping to obtain information about passengers’ acceptance of autonomous vehicles.
Fribourg, Switzerland
In Fribourg, the local public transport company, Marly Innovation Center, and different public actors have launched their autonomous shuttle pilot to connect the Marly Innovation Center area to the public transport service. The pilot started in September 2017, and it was available for passengers from December 2017 onwards. The primary objective of this pilot is to transport commuters to their work place. Another objective is to connect the residents of the area to the urban public transport network. This new connection is hoped to attract new business to the area. This is the first regularly-operated autonomous shuttle in Switzerland. During the peak hours, the shuttle runs every 7 min; the vehicles will eventually operate on demand, and an operator will be inside at all times. The vehicles adaptation to road traffic is seen as a challenge. Therefore special arrangements have been agreed on between the different partners. This pilot is hoped to provide information about whether this kind of system could be exported to other parts of the canton of Fribourg, and it has already raised interest in various federal offices due to the possibilities that autonomous shuttles could provide for isolated areas.
Château de Vincennes, Paris, France
The aim of this pilot is to connect the nearby metro station and the culture and entertainment area together. Prior to the pilot, there were very poor connections in this 2-km distance; hence, the length of the route is planned to be extended in stages. The issues of this pilot are described to be crossroads, increased speed and progressive insertion into the traffic. The pilot is also aiming to explore platooning with autonomous shuttles to solve the problem of traffic peaks. The ultimate goal of the pilot is to be able to operate a number of autonomous shuttles adapted to the flow of users.
Helsinki, Finland
The first autonomous shuttle pilot of Finland, that was carried out in open public roads, is called SOHJOA. Within this pilot, a couple of robot buses have been operating in three different Finnish cities. The objective was to learn how autonomous shuttles adapt to harsh winter conditions, but it became clear that the technology is not yet advanced enough. Another objective was to provide a platform for Finnish companies to develop and test their products and services. An example of these was a logistic company that piloted package delivery around the pilot district of Espoo. SOHJOA faced challenges as it was not allowed to modify the shuttle in any way. This pilot provided also some information on how people received this kind of a vehicle. The information was collected by a survey. All in all, SOHJOA provided a comprehensive understanding, what it is that these autonomous shuttles require to operate and function in mixed vehicle traffic on public streets.
Tallinn, Estonia
Tallinn pilot, which took place during the EU Presidency, received positive attention. The pilot with two EasyMile buses for three summer months in 2017 was initiated by the Government Office, Ministry of Economic Affairs and Communications in collaboration with the private sector (Milrem, EasyMile, DSV, Tallink). The pilot took place in Tallinn downtown close to the Old Town and Old Harbor. The main issues were related to procurement and operation. For example, the buses failed to recognize traffic lights, and pedestrian crossings had to be taken over manually each time. The pilot was operated by the local company Milrem, and they carried thousands of travellers.
La Defense, Paris, France
La Defense is a business district in Paris where 500,000 people travel to and from work every day. The three shuttles of this pilot are operating in pedestrian areas only. People in this area have quickly adopted this new mobility option. The shuttles depart every 10 min during peak hours and in the off-peak periods, every 20 min.
Sion, Switzerland
The pilot in Sion is called SmartShuttle, and it contains two shuttles operating between historical sites of the town. The shuttles are operated remotely; however, due to legislation, an employee is on board. The pilot was executed to examine whether the autonomous shuttle service is technically and operationally feasible in the public space and if it offers an additional value to the customers. The pilot is planned to supplement existing transport options. There is a plan to extend the pilot and conduct a study to understand how people feel about autonomous shuttles.
Stockholm, Sweden
Stockholm launched their six-month pilot in January 2018. The pilot is managed by Nobina, the biggest Nordic transport company. The project is part of Test Site Stockholm, a research program based at KTHRoyal Institute of Technology’s Integrated Transport Research Lab. The area of the pilot is called the “Scandinavian Silicon Valley”. The aim of the pilot is to eventually implement these shuttles into their public transport system.
Toulouse, France
There have been two pilots in Toulouse. According to a study made within the first one, the autonomous shuttle was really well received by the passengers: 97.5% of respondents found the shuttle comfortable and the driving pleasant; 78.5% of users felt safe aboard the shuttle; and 90.5% of people would have boarded even if there were no operator. The second pilot aims to remove the operator from the shuttle; therefore, it has been divided into three phases. In the first phase, the operator will be on board, but in the second phase, the operator will only follow the shuttle from outside. In the final stage, the operator will be removed altogether.
Wageningen, The Netherlands
Wageningen launched a pilot that consists of two autonomous shuttles. These shuttles travel between the city’s railway station and the Wageningen University & Research campus. The city officials have outlined that the lesson to be learned from this pilot is the need for cities to clarify the learning goals for autonomous shuttle pilots and how important it is to communicate the experimental failures, as well as successes. In Wageningen, it is seen as important that the cities take a leading role in the development of autonomous shuttles, rather than the industries.
CityMobil2
The cities and pilots of the CityMobil2 EU-funded project varied greatly. However, all the cities and pilots had the same objective: to adapt autonomous vehicles to be a part of the public transport system. The aim was also to do an assessment of the vehicles’ transport, environmental and economic performances. As the most important project carried out until then, CityMobil provided a comprehensive set of conclusions regarding the implementation of an Automated Road Transport System (ARTS) and the barriers to overcome: the lack of an implementation framework for cities, the absence of a specific legal framework and the unknown wider economic effect. Overcoming and removing these barriers were the main objectives of CityMobil2. Furthermore, the pilots gathered information on acceptance, vehicle performance and interaction with other road users.
Lyon, France
This pilot is said to be the first regular service provided by autonomous shuttles, and it inspires many other pilots in France. Navya created a mobile app for the passengers to know where the shuttles are located on their route in real time and to consult the schedule.
AirportWeeze, Germany
An important part of the project “Interregional Automated Transport” in Interreg A is the (further) development of technical innovations and solutions for the automotive and logistics sector, especially in the areas of automation, information and communication technology, artificial intelligence, measurement and sensor technology. The testing of prototypes in the German-Dutch border region will enable important progress in autonomous driving. The test operation with autonomous vehicles (WEPods) is to take place at Weeze airport (car park shuttle) and in a cross-border transport corridor (for example, Aachen-Vaals). In the project, research institutions, large enterprises, SMEs and public institutions from the region are working closely together to promote knowledge transfer and product innovations in the German-Dutch border area and to strengthen the regional economy.
Munich, Germany
In the project “Optimized Transport System (OTS) based on self-propelled electric vehicles”, funded under the “Eneuerbar Mobil” funding program of the German Federal Ministry for the Environment, Nature Conservation and Nuclear Safety (BMUB), an autonomous and electric vehicle will be developed. The vehicle will be tested in Munich Perlach in the middle of 2018. OTS’s most important feature is the inclusion of information from permanently installed infrastructure for the observation and evaluation of traffic, including transmission of the information to the vehicle (car-to-infrastructure). This approach promises additional safety for autonomous driving and a better traffic flow compared to systems with only vehicle-based sensors. The aim of the project is to examine concrete approaches for future mobility concepts (infrastructure and vehicle) and their business models.
Hamburg, Germany
The project HEAT (Hamburg Electric Autonomous Transportation) will create visibility for autonomous driving with emission-free shuttle buses in a first test area in Hamburg’s HafenCity. The aim is to prove that a fully-automated or autonomous vehicle system can be integrated into regular road traffic. The goal is to develop, test and deploy electric autonomous vehicles and systems.
Osnabrück, Germany
Together with the partners Stadtwerke Osnabrück, the Innovation Centre for Mobility and Societal Change (InnoZ), Kompetenzzentrum ländliche Mobilität Wismar (KOMOB), the German Aerospace Center (DLR) and HaCon, a distribution platform is to be established within the project period, which in combination with a mobility platform for customers, enables the interconnectedness of the on-demand traffic offer with a central bus line both for the transport company and for the customer. In addition, the developed platform is also to be applied to an autonomous vehicle.
Future Pilots
The number of autonomous pilots is increasing, and a part of them is currently under development.
Table 2 reports a summary of not yet started pilots, which will be operated in public roads with passengers. However, this is incomplete, since no institution has already compiled a comprehensive list. The closest equivalent would be Bloomberg Philanthropies and the Aspen Institute, which provide a rather inclusive overview of the cities testing autonomous vehicles.

 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}