Optimization of Vehicular Trajectories under Gaussian Noise Disturbances

Abstract
:1. Introduction and Motivation
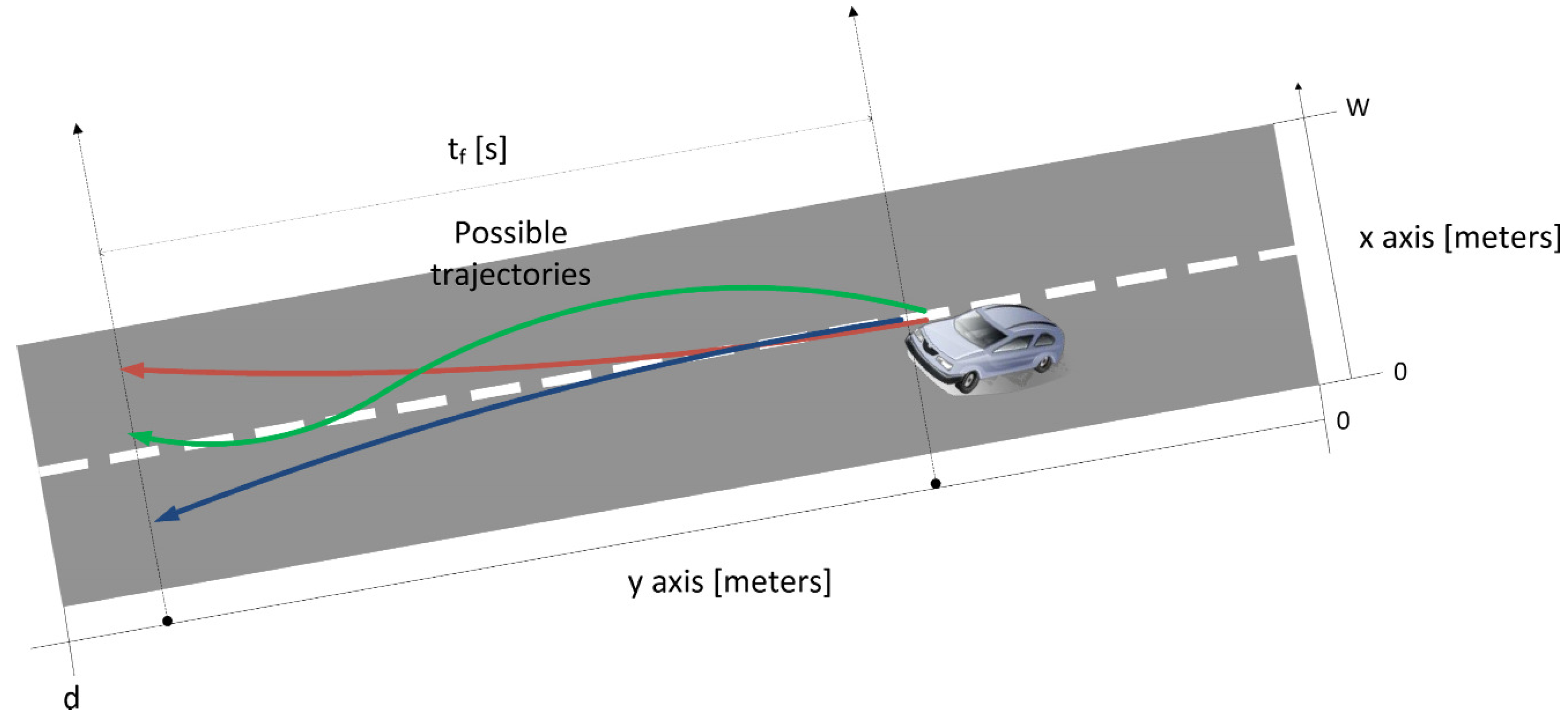
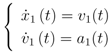
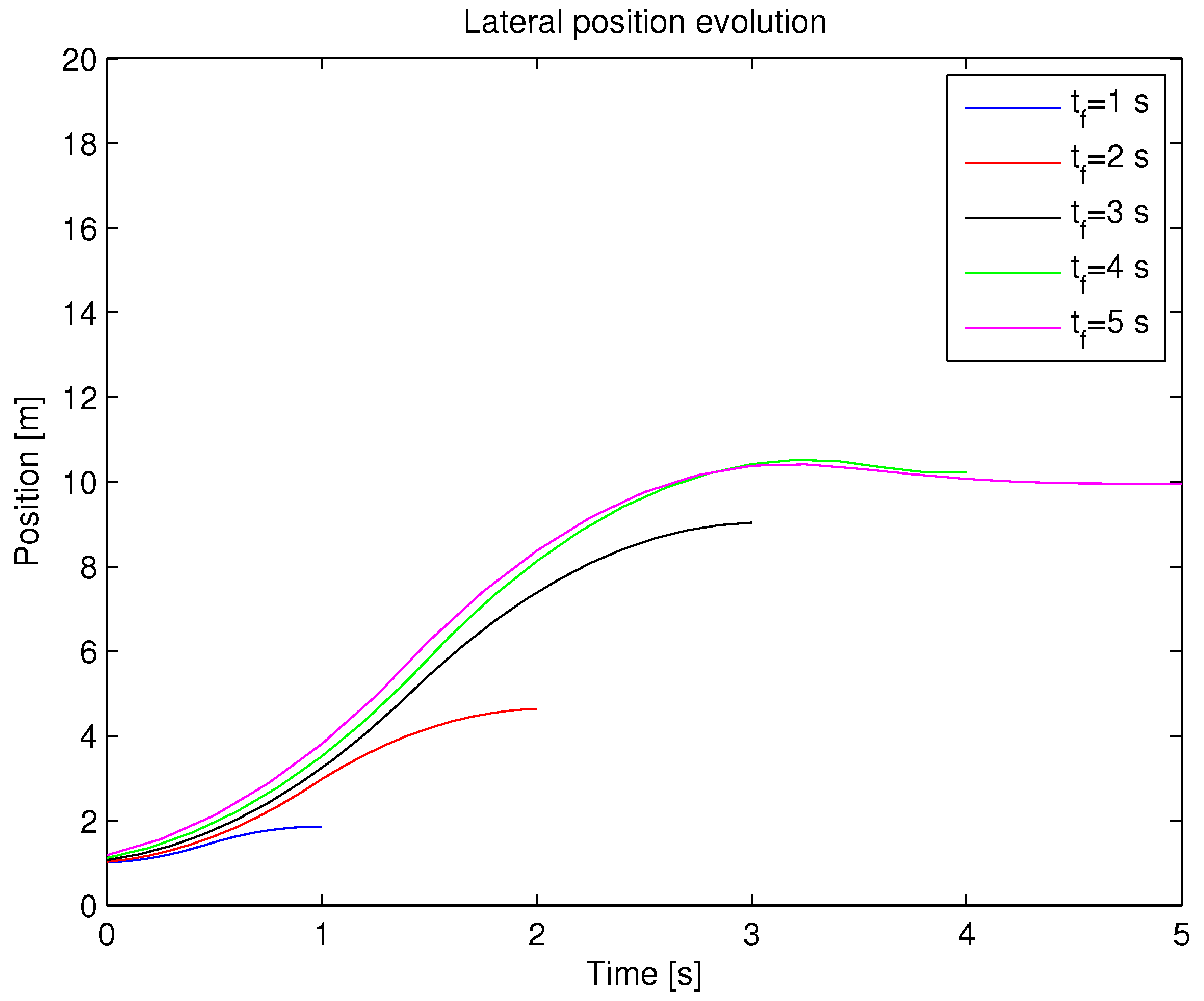
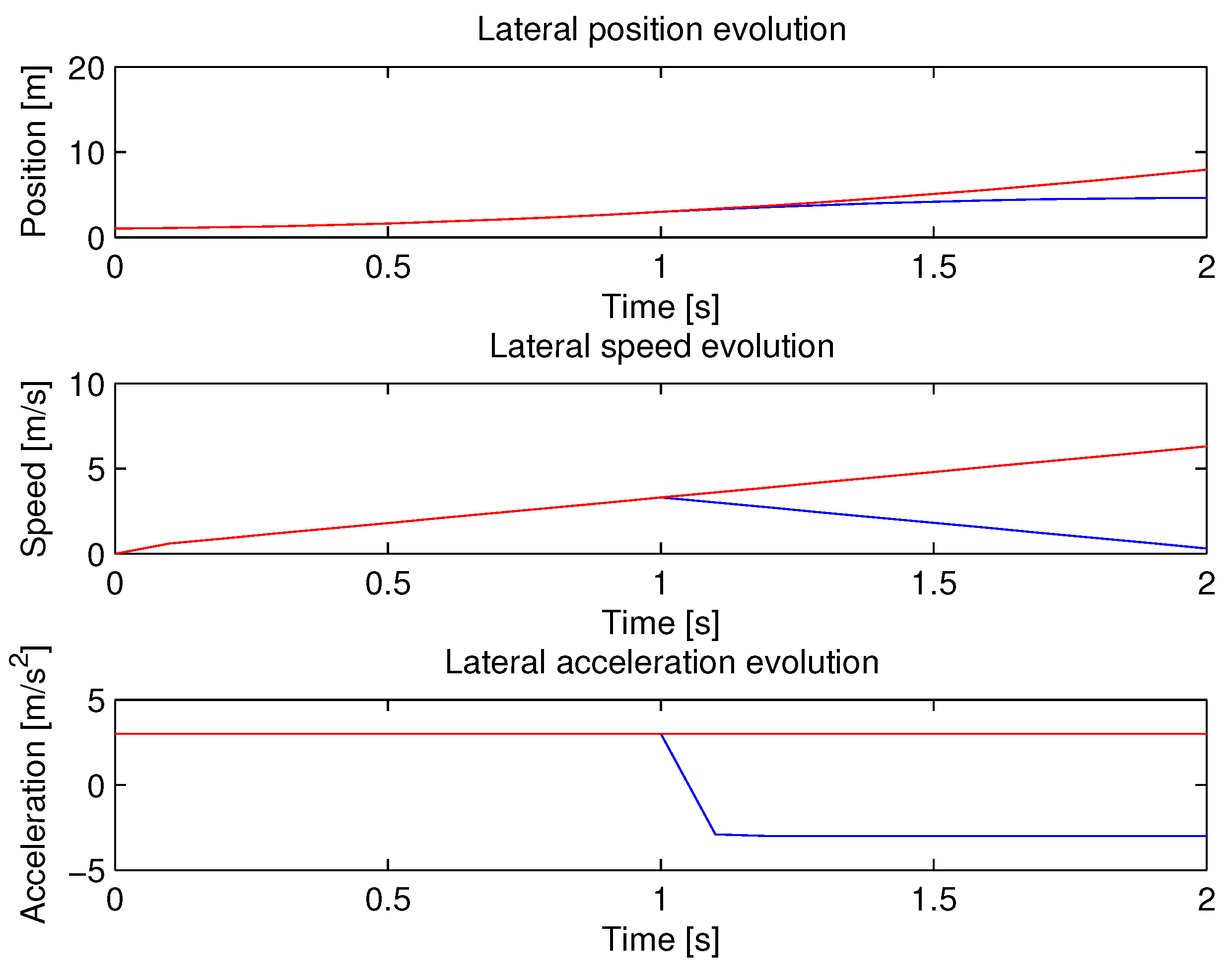
- A discussion on the different ways to compute optimized real-time maneuvers for a high-speed moving vehicle subject to timing constraints (the maneuver must be performed in a maximum time interval of tf ).
- The evaluation of functionals including the minimization of the final lateral speed. By keeping the final lateral speed (at tf ) as low as possible, the possibility of continuing in the optimum lateral position is also maximized.
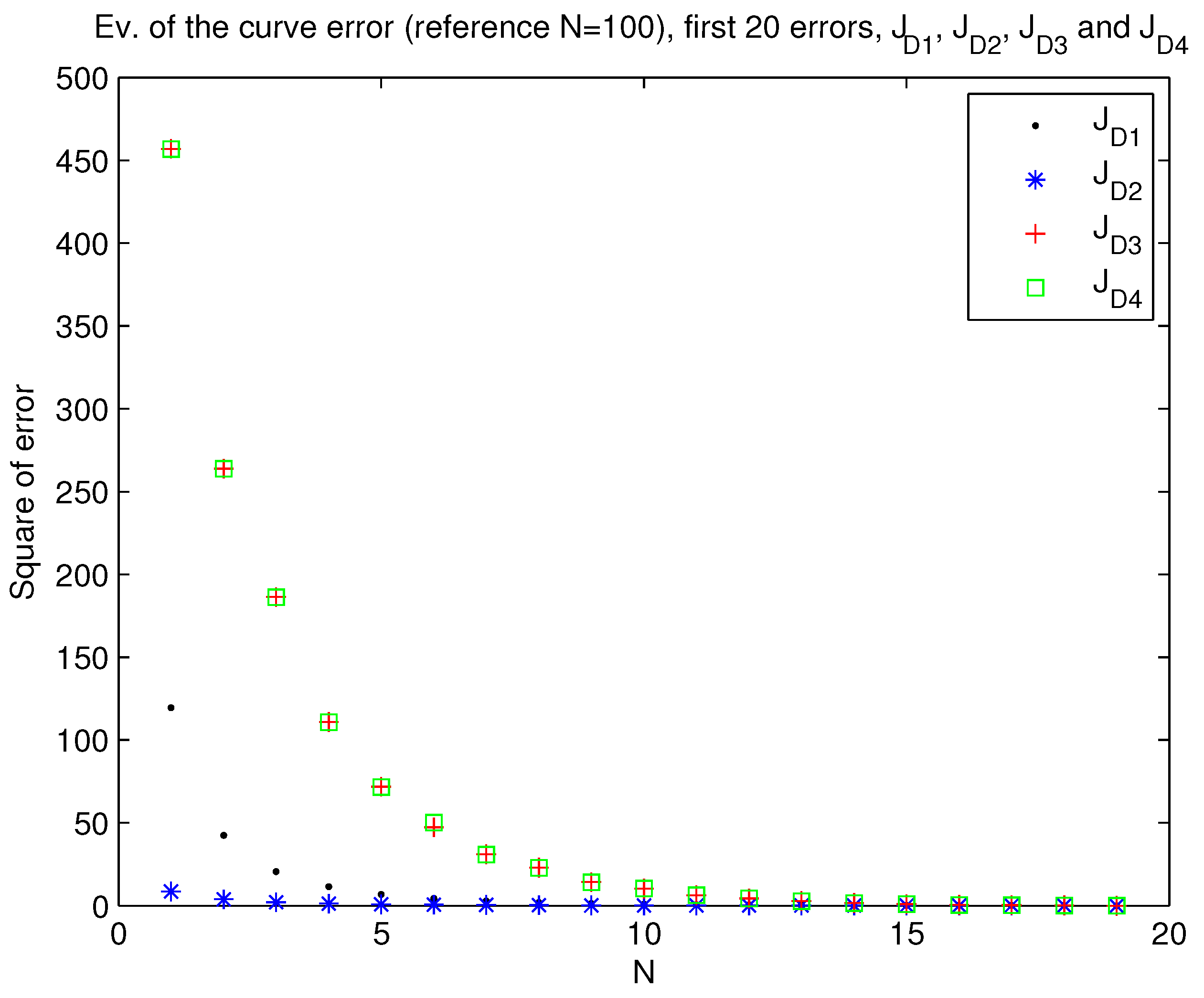
- A preliminary discussion on the accuracy of the computed trajectories by an evaluation of the discretization factor N (number of stages in which the trajectory is divided into).
- An analysis on how trajectories could be affected by random Gaussian noise, and the application of Kalman Filter theory to minimize the impact of unwanted deviations from the optimum path.
2. Related Work
3. Problem Statement and Results
3.1. Scenario Description and Formulation
- Lateral acceleration restrictions. The absolute value of the lateral acceleration cannot take a value higher than the limit c(vi) m/s2, where vi is the constant longitudinal speed of the vehicle and c(·) is a function of the longitudinal speed.
![Futureinternet 05 00001 i002]()
- Lateral position restrictions. The vehicle can only have a lateral displacement inside the width limits of the road.
![Futureinternet 05 00001 i003]()


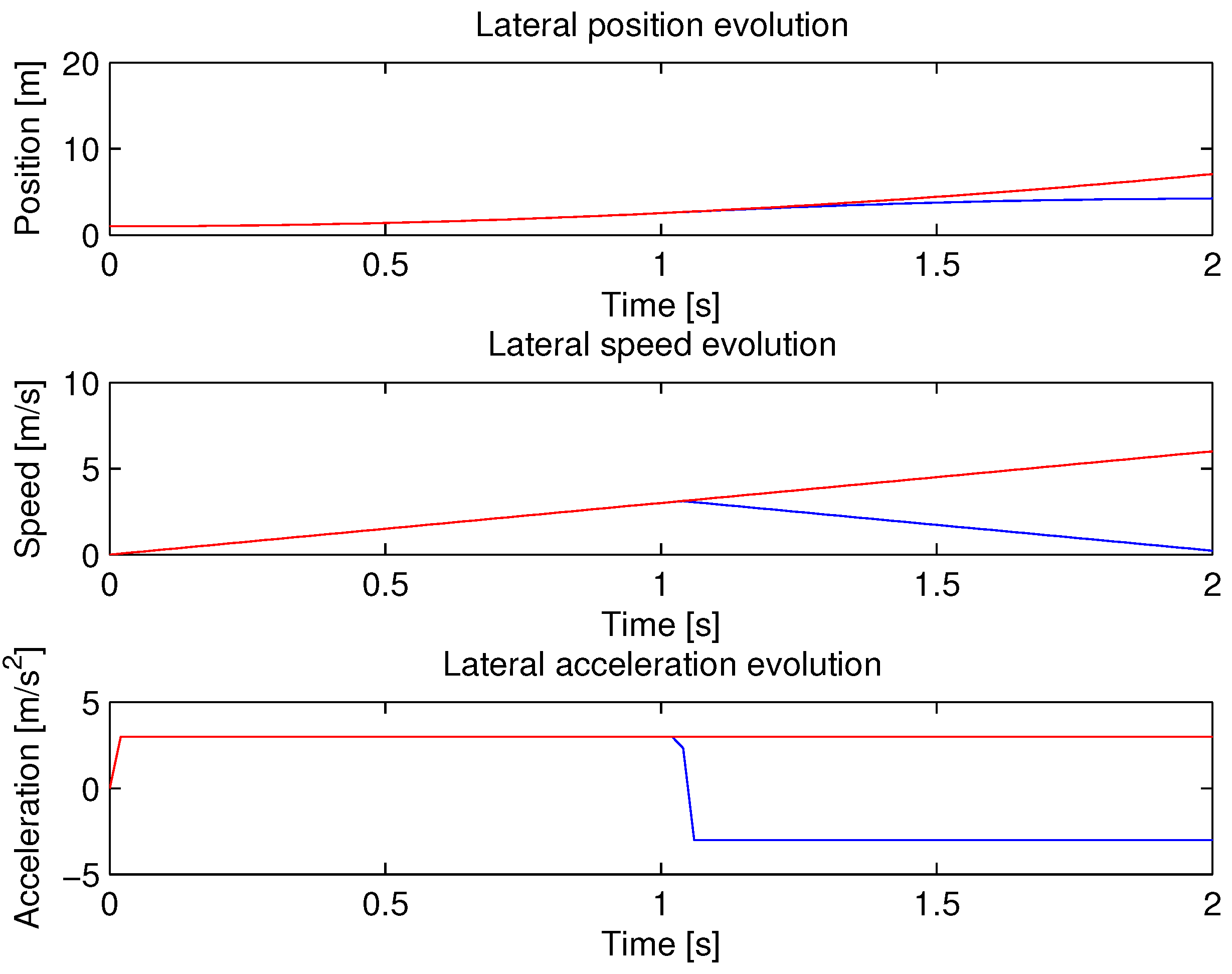
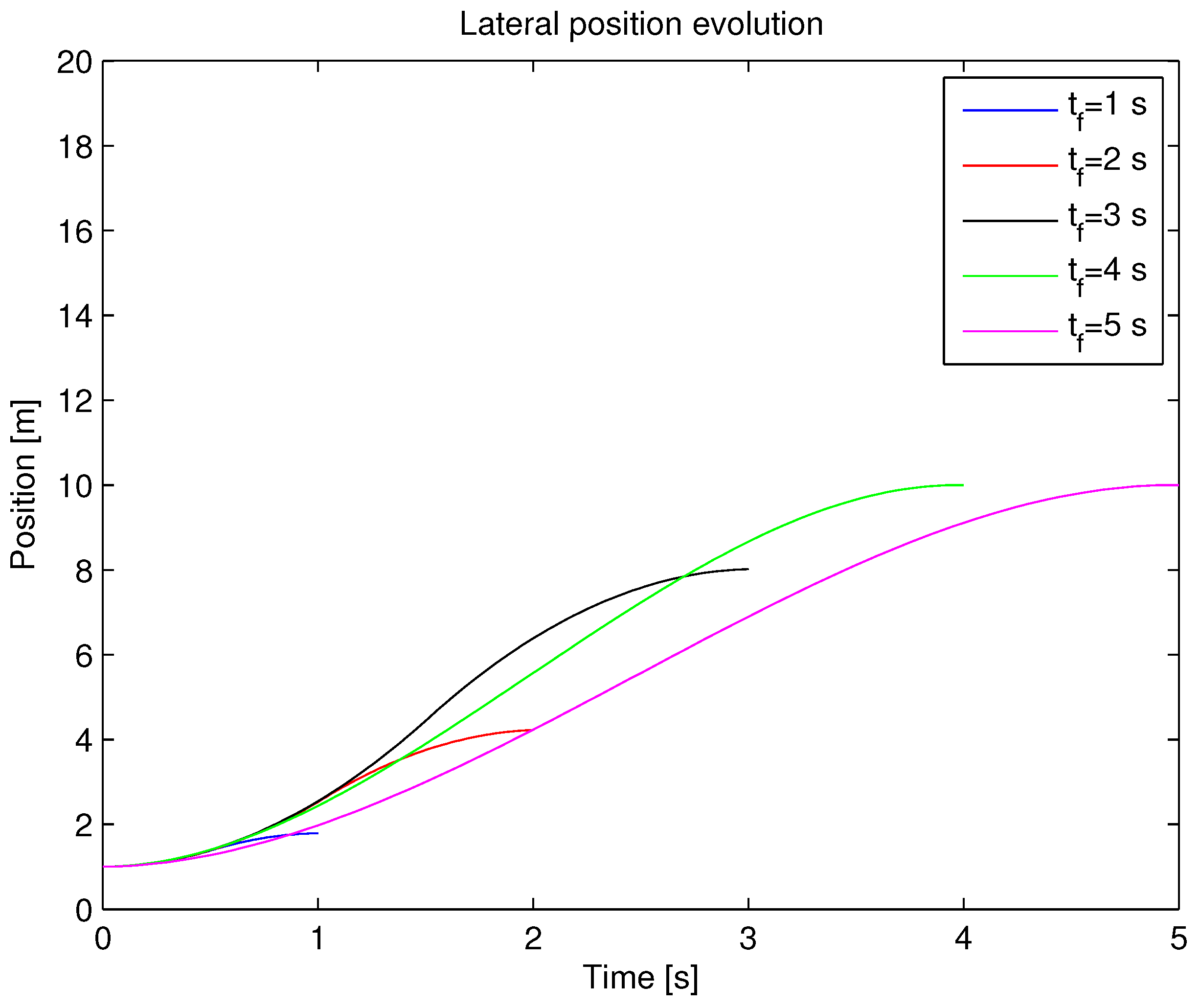
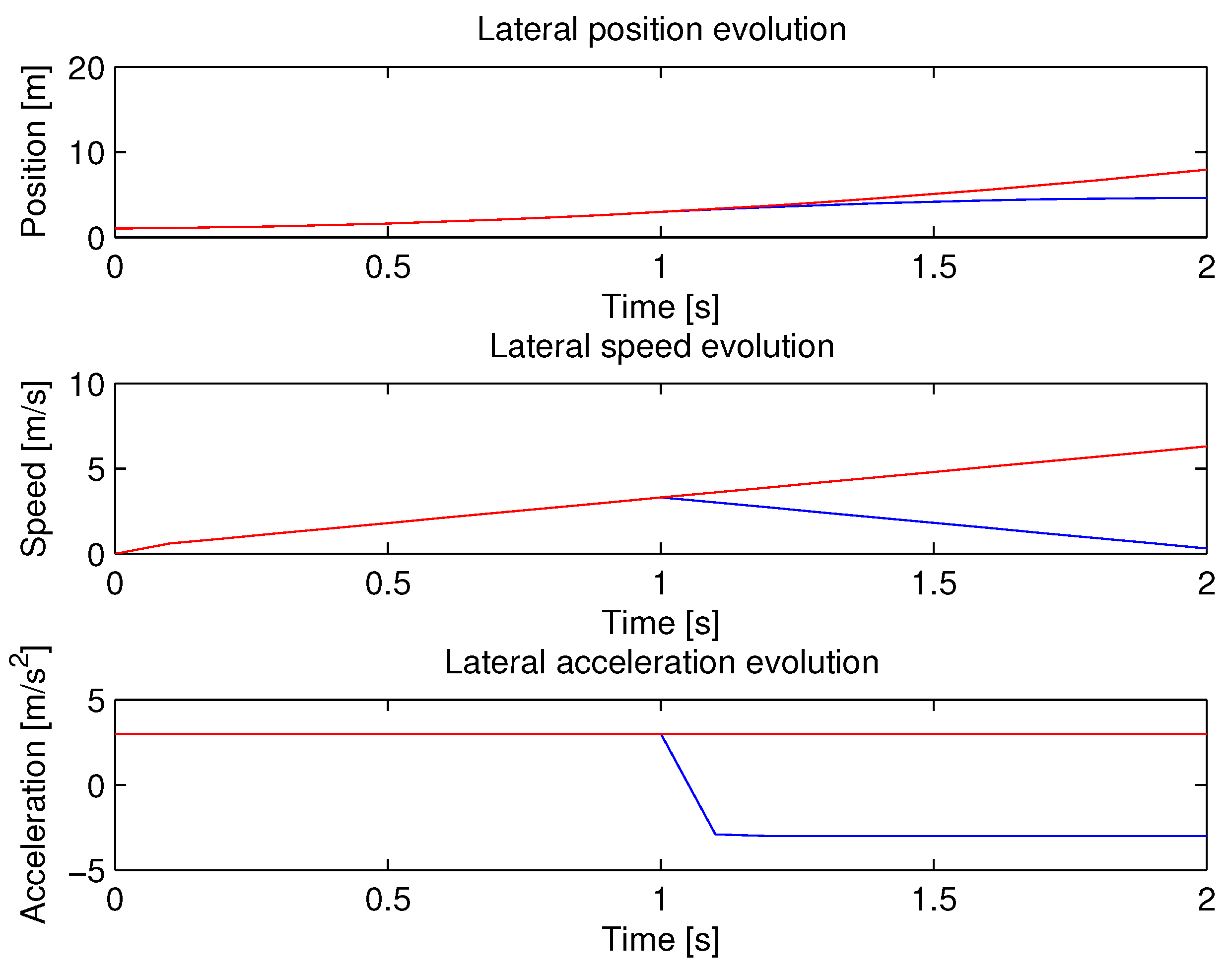
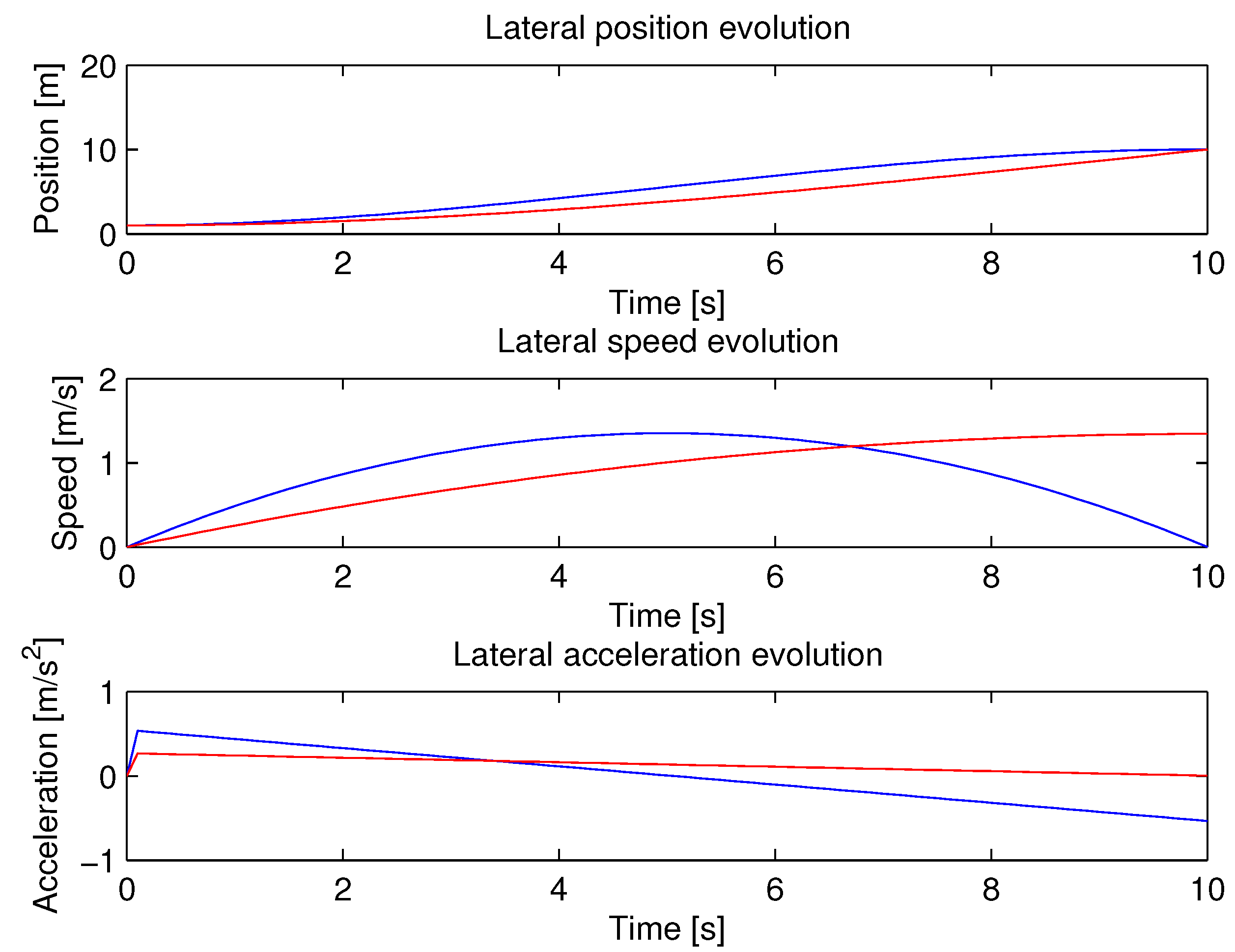
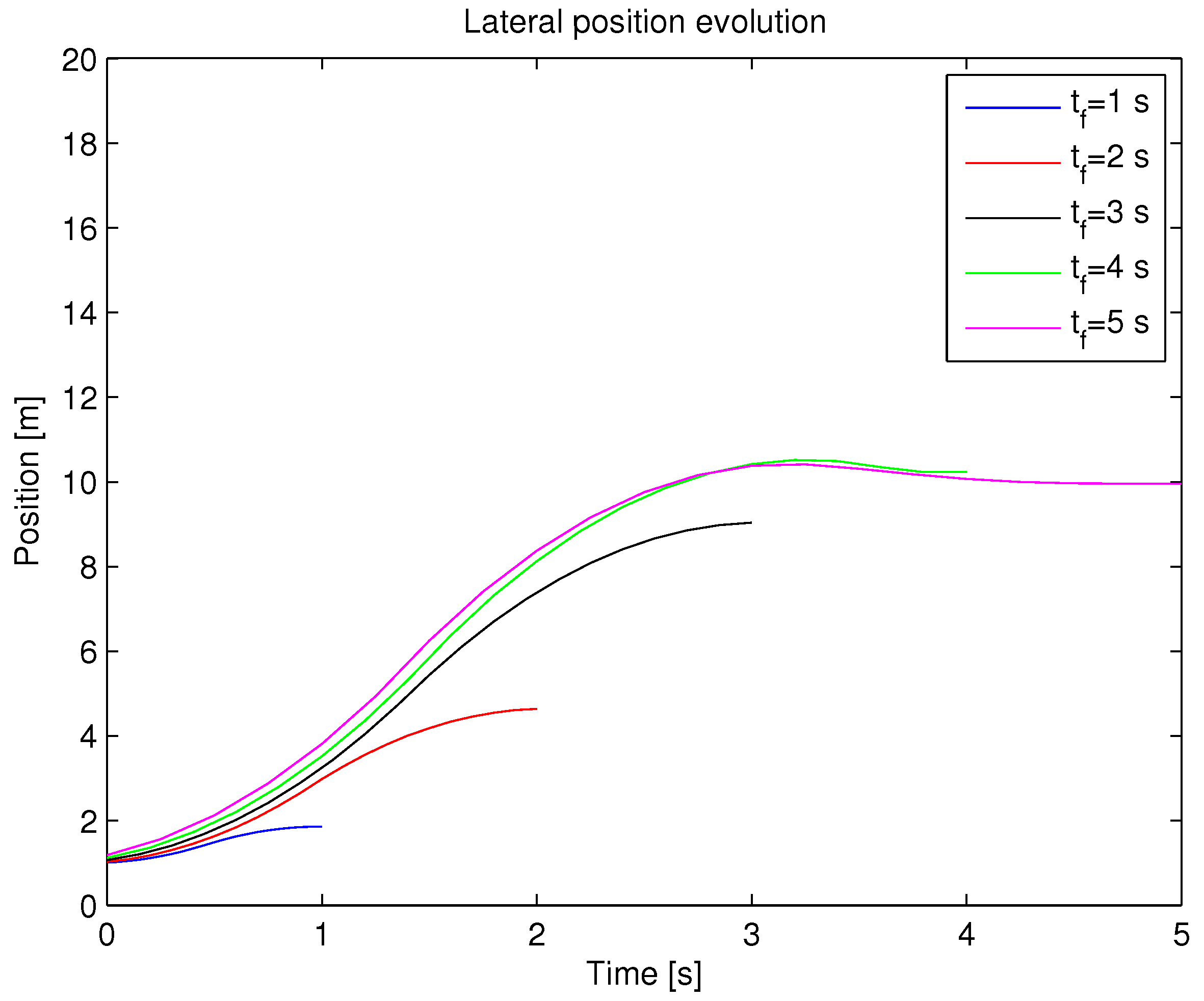
- Final lateral distance maximization and final lateral speed minimization. In this case we want to minimize the final variance of the lateral distances left by the vehicle after tf , while minimizing the lateral speed at the end of the trajectory. The equation corresponding to this functional takes the form:
![Futureinternet 05 00001 i004]()
- Final lateral distance maximization. In this case we skip the minimization of the lateral speed at the end of the trajectory. We only perform here the maximization of the final lateral distance.
![Futureinternet 05 00001 i005]()
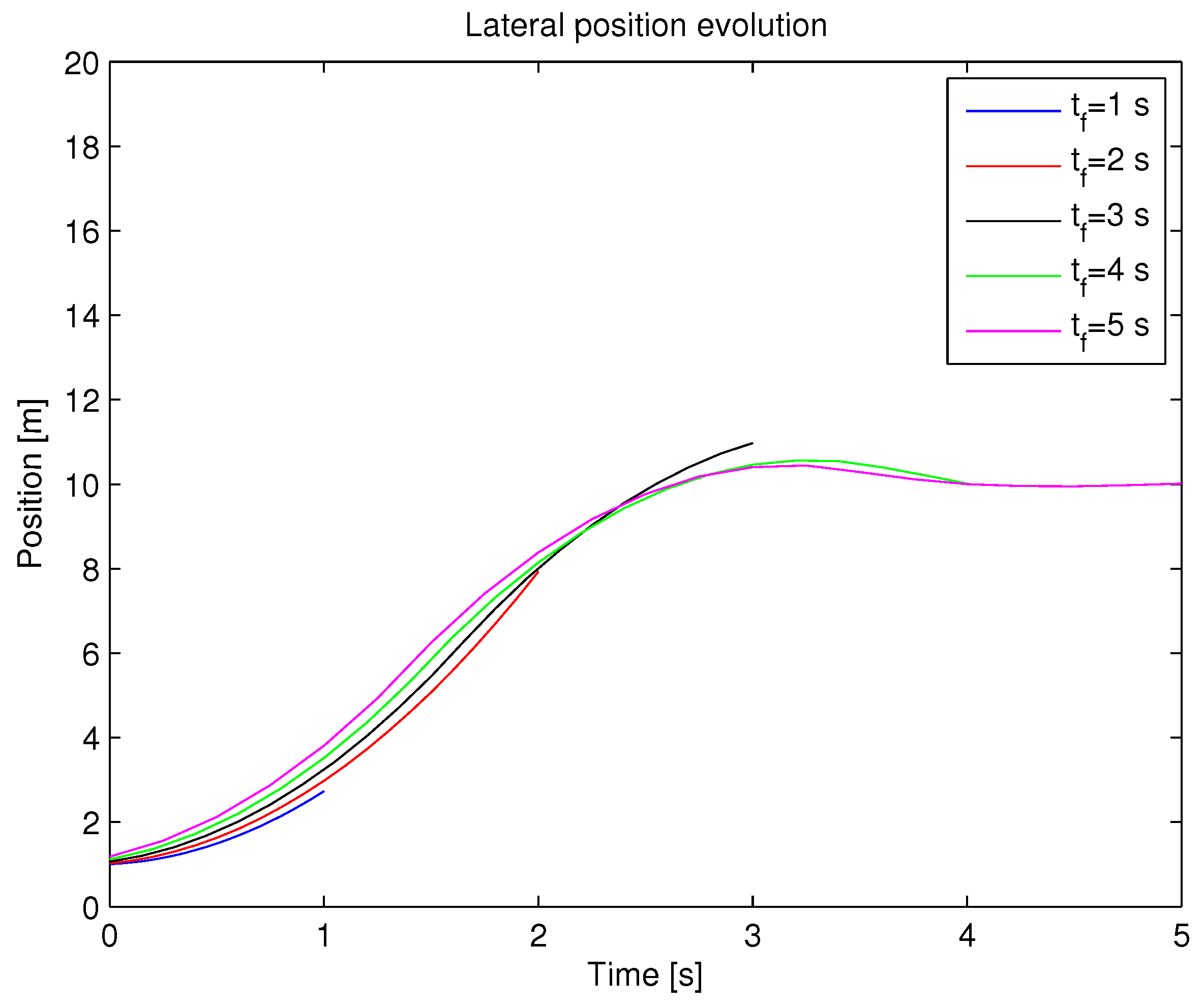
- Instantaneous lateral distance maximization and final lateral speed minimization. This functional aims at maximizing the instantaneous lateral distance while minimizing the lateral speed at the end of the trajectory.
![Futureinternet 05 00001 i006]()
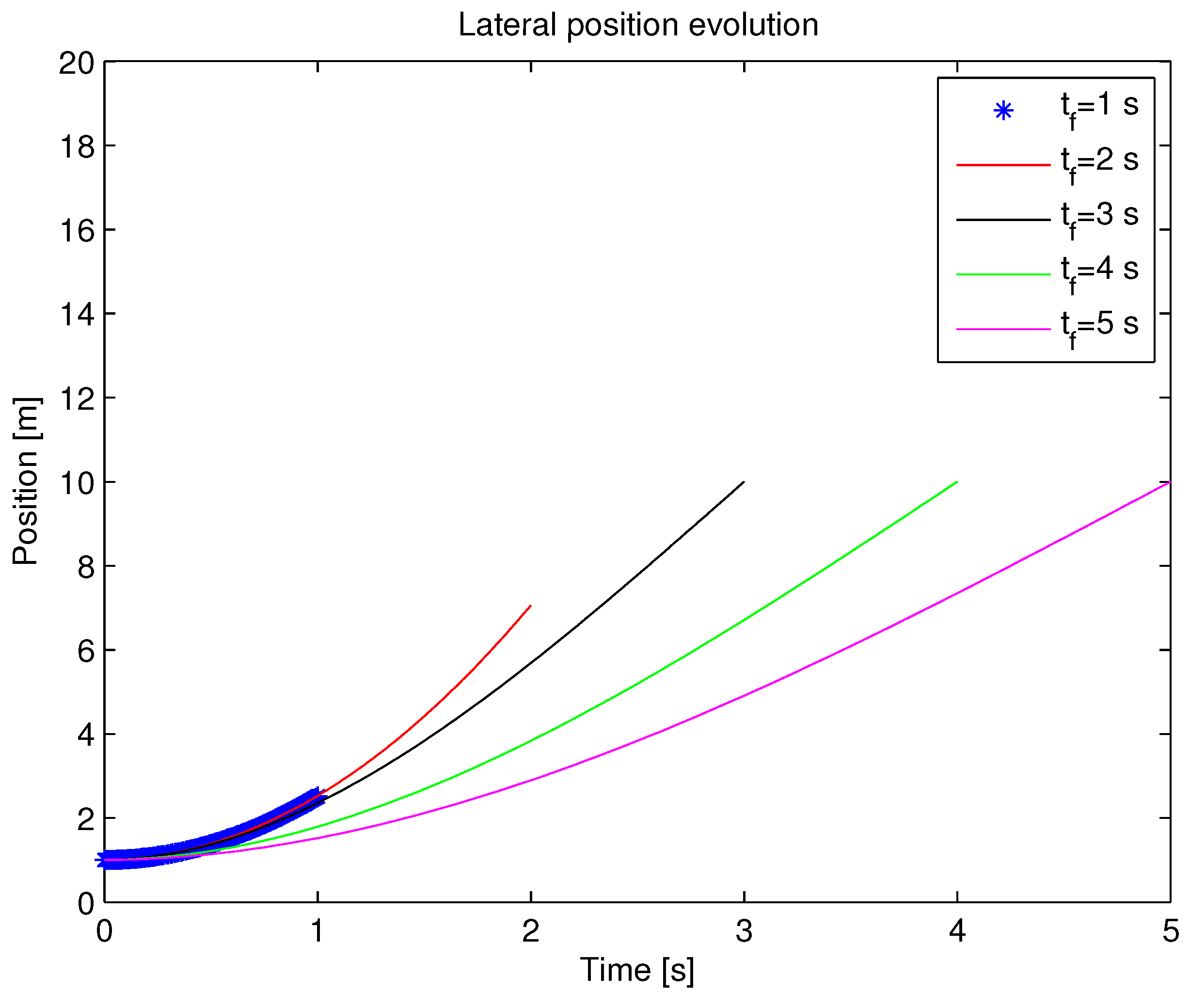
- Instantaneous lateral distance maximization. In this case, we skip the minimization of the lateral speed at the end of the trajectory, but we maximize the instantaneous lateral distance (during the maneuver).
![Futureinternet 05 00001 i007]()




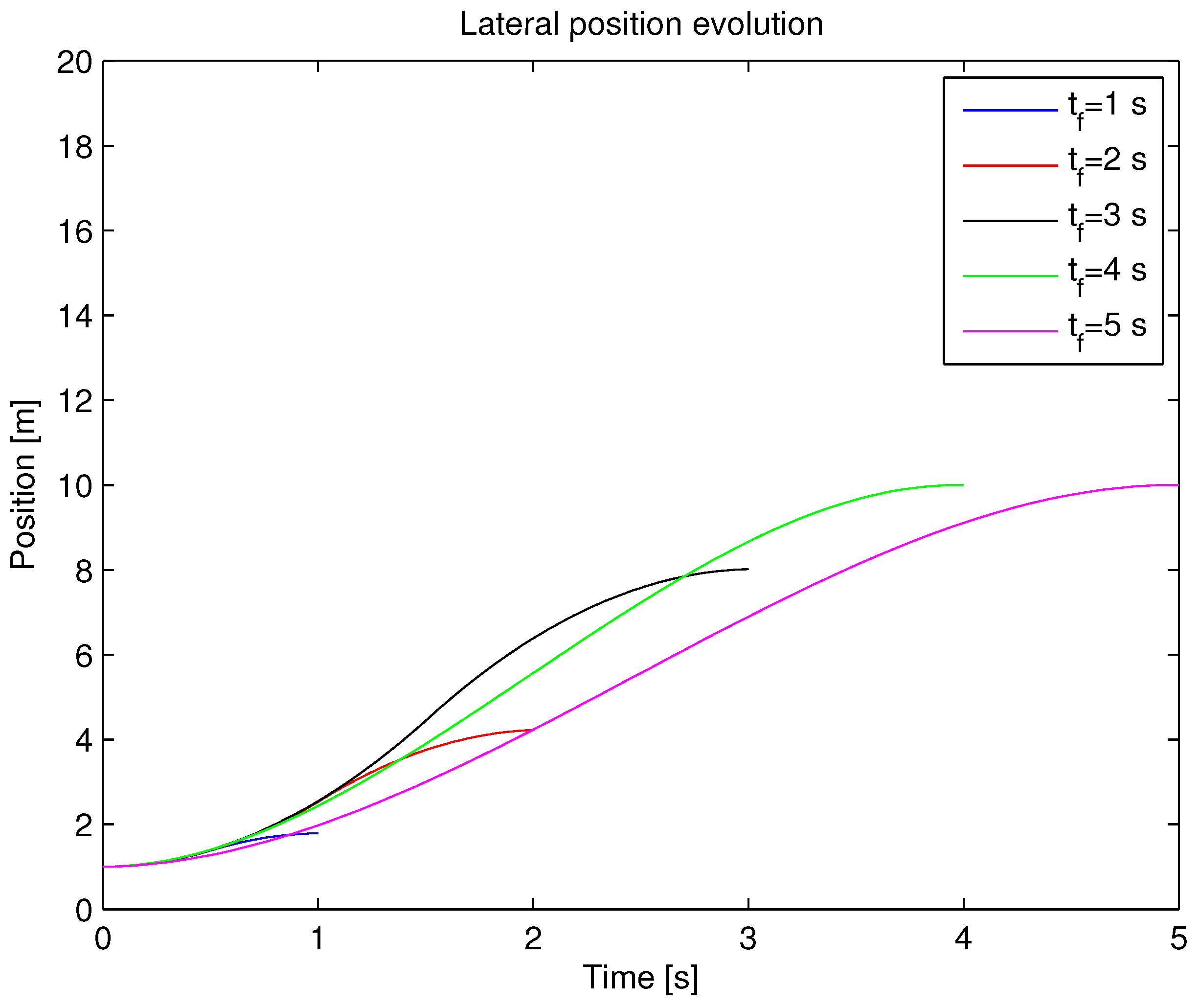
3.2. Final Lateral Distance Maximization

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Evaluation parameter | Meaning | Value |
|---|---|---|
| N | Discretization factor | 20 |
| X0 | Initial lateral position | 1 m |
| V0 | Initial lateral speed | 0 m/s |
| a0 | Initial lateral acceleration | 0 m/s2 |
| W | Road width | 20 m |
| vi | Longitudinal speed | 120 km/h |
| c(vi) | Maximum absolute lateral acceleration | 3 m/s2 |
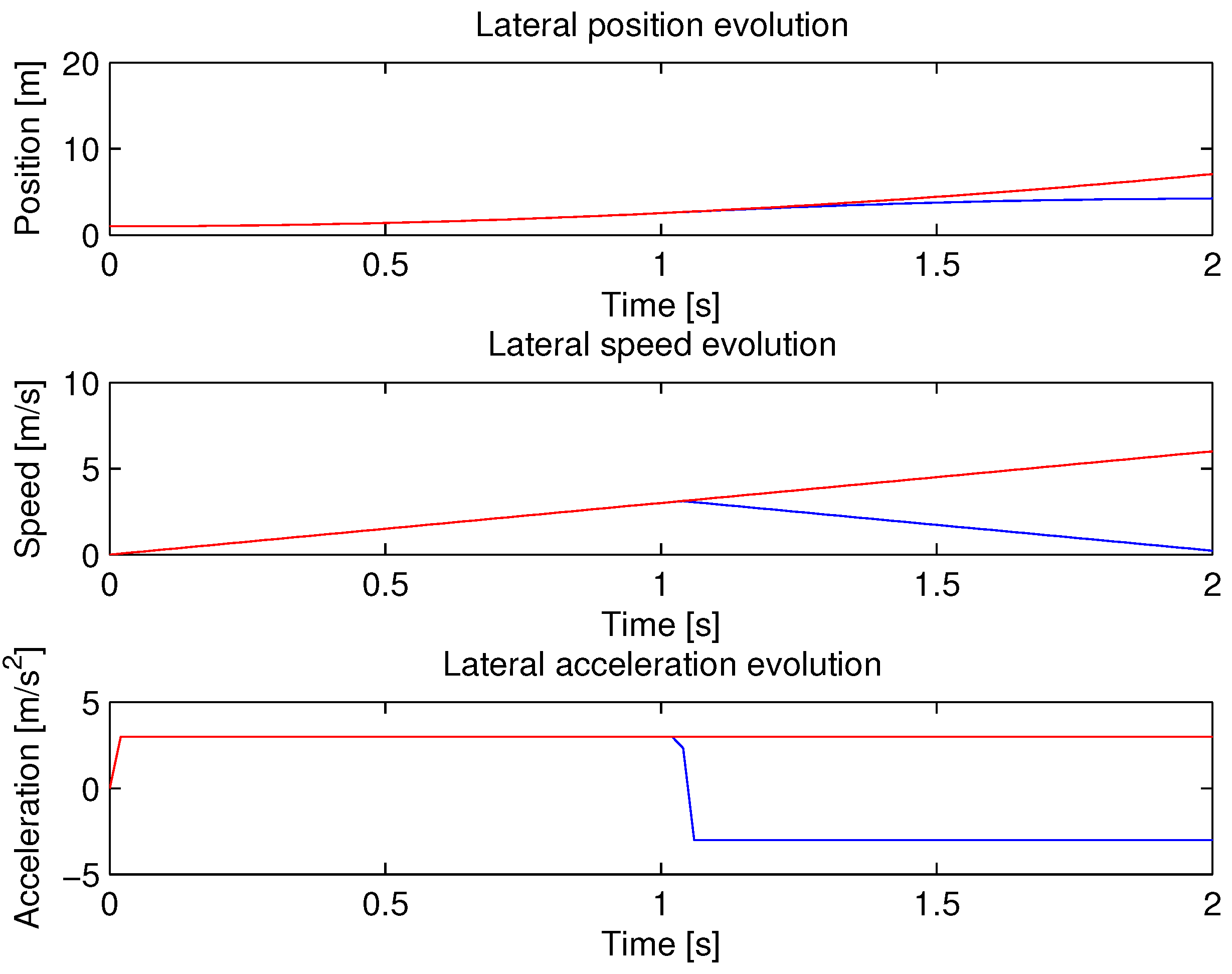
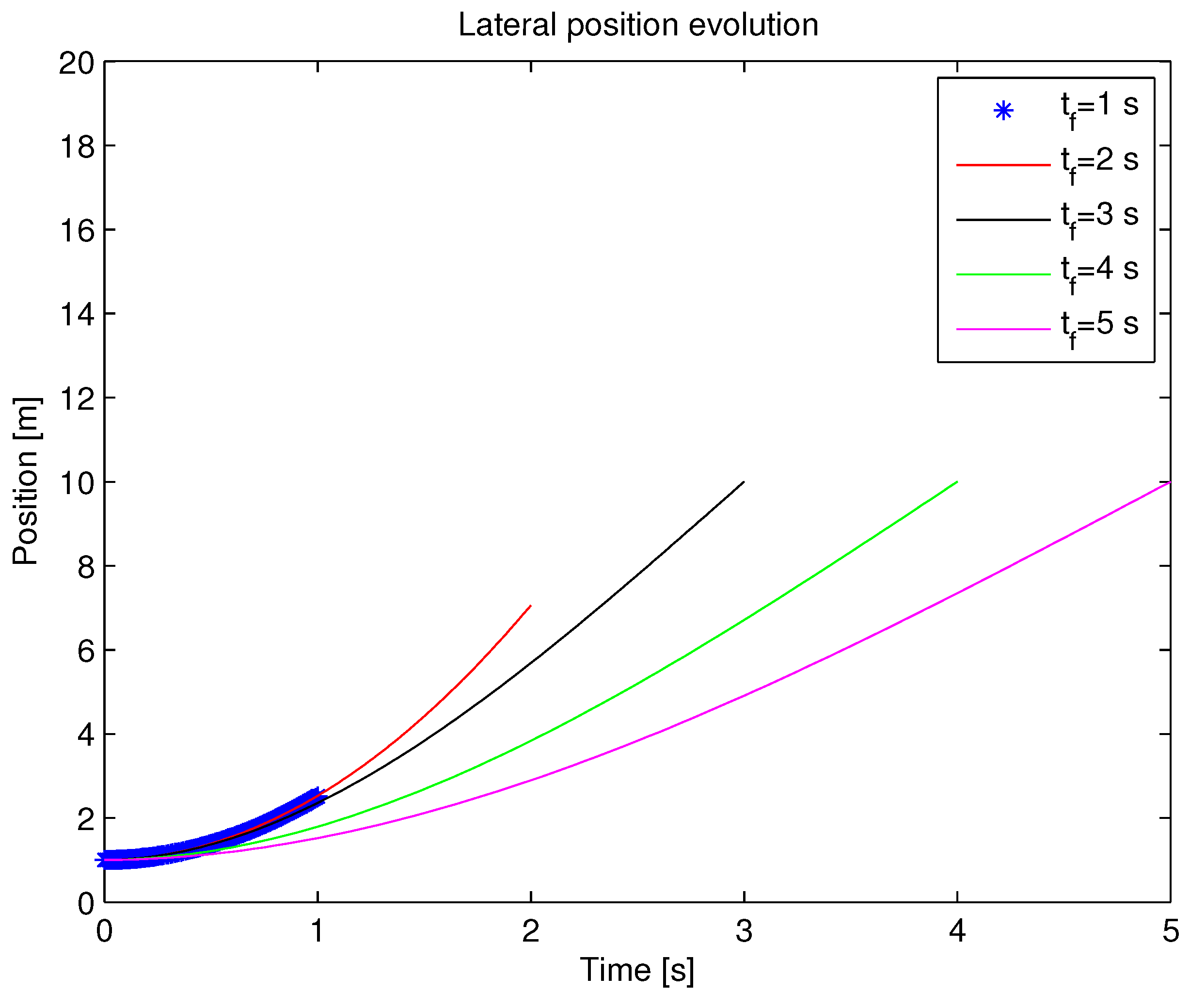
3.3. Instantaneous Lateral Distance Maximization
3.4. Discretization Influence

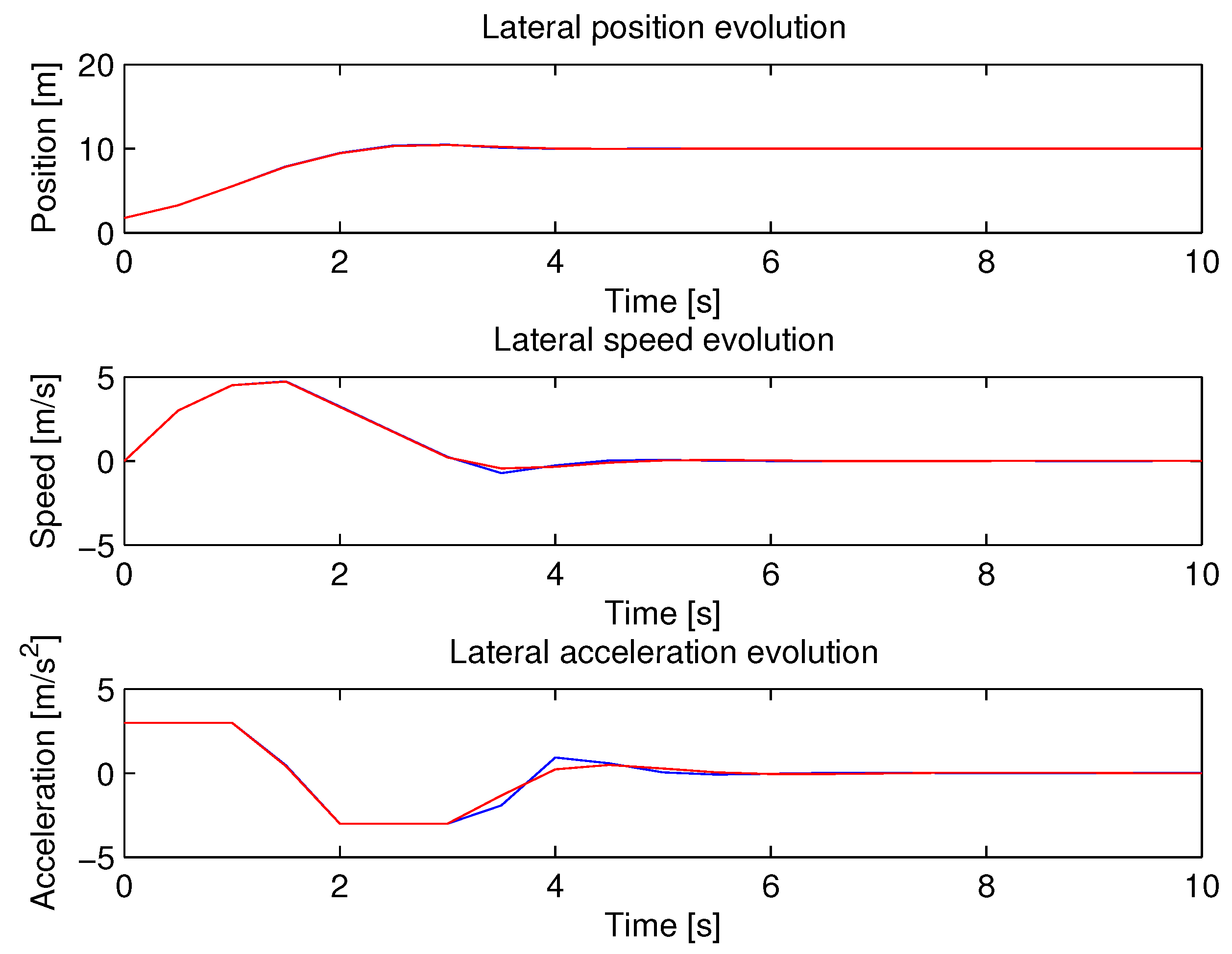
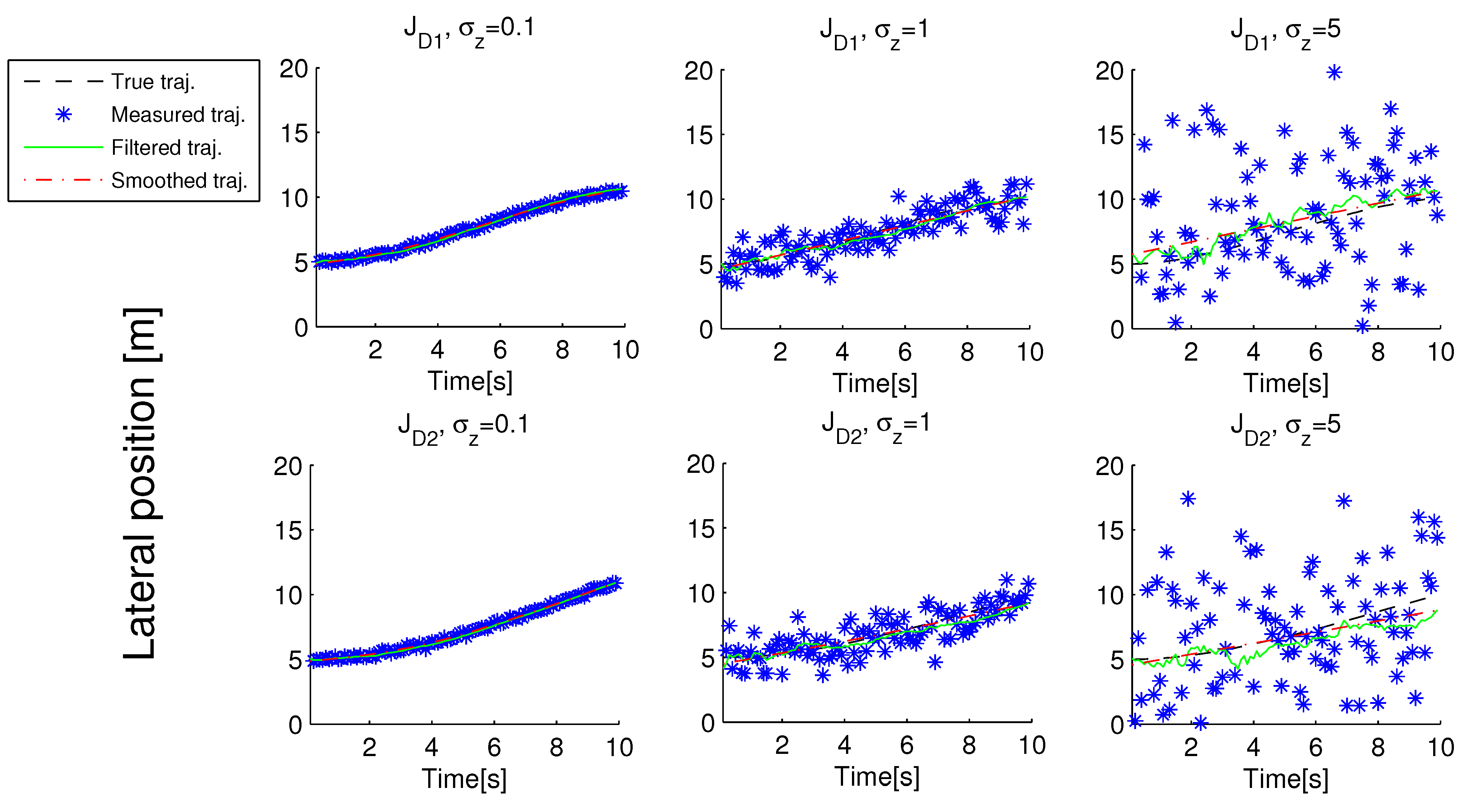
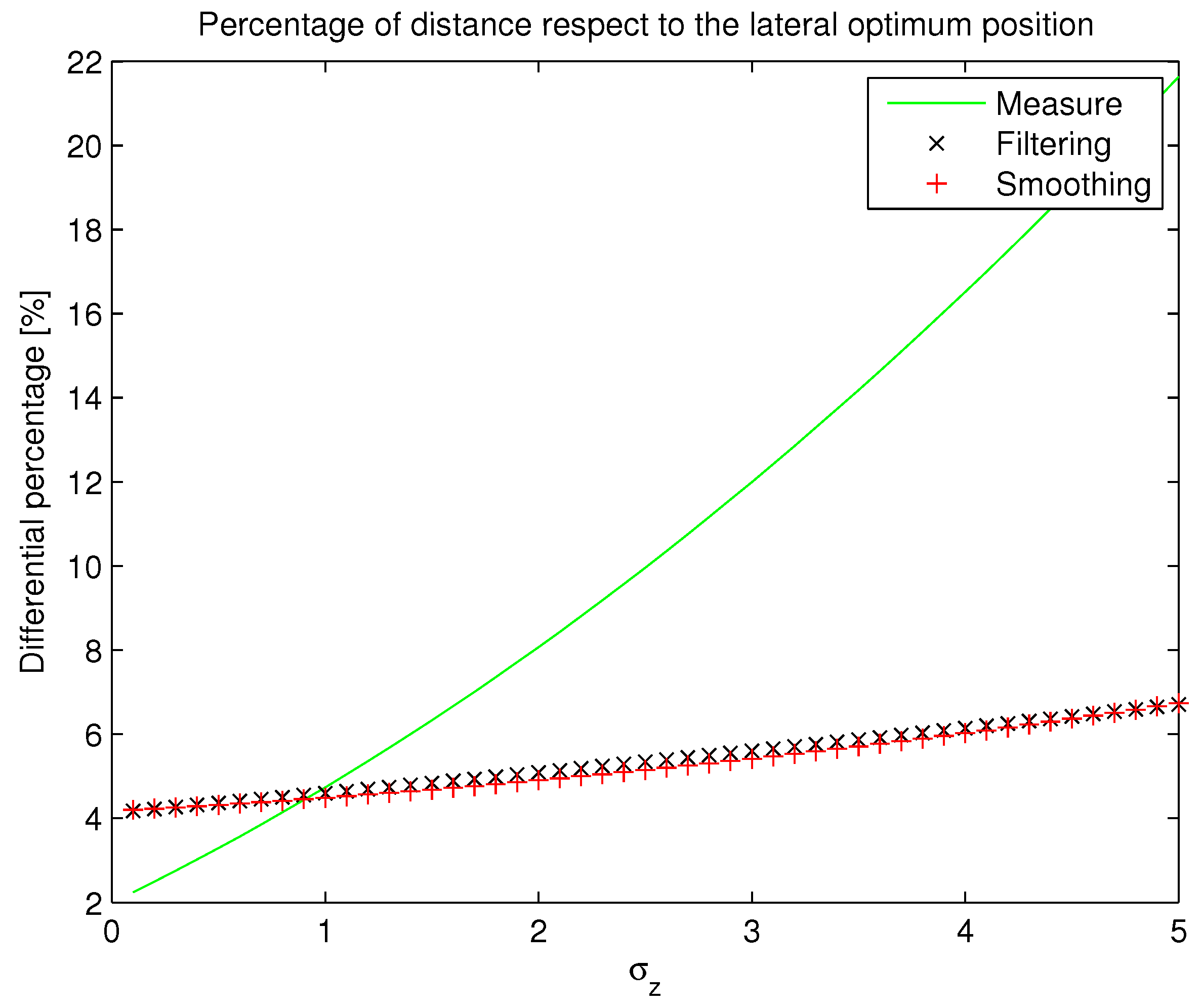
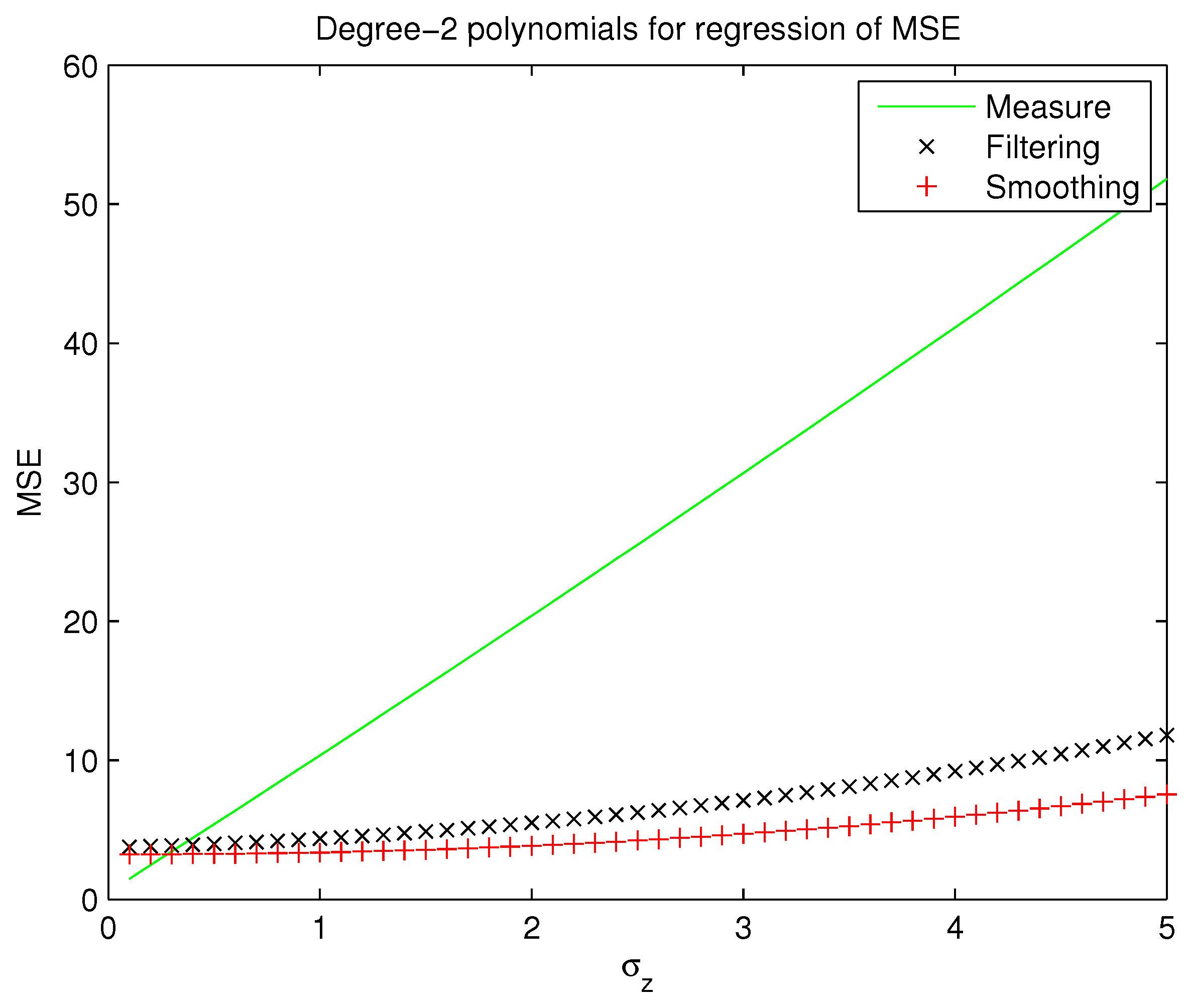
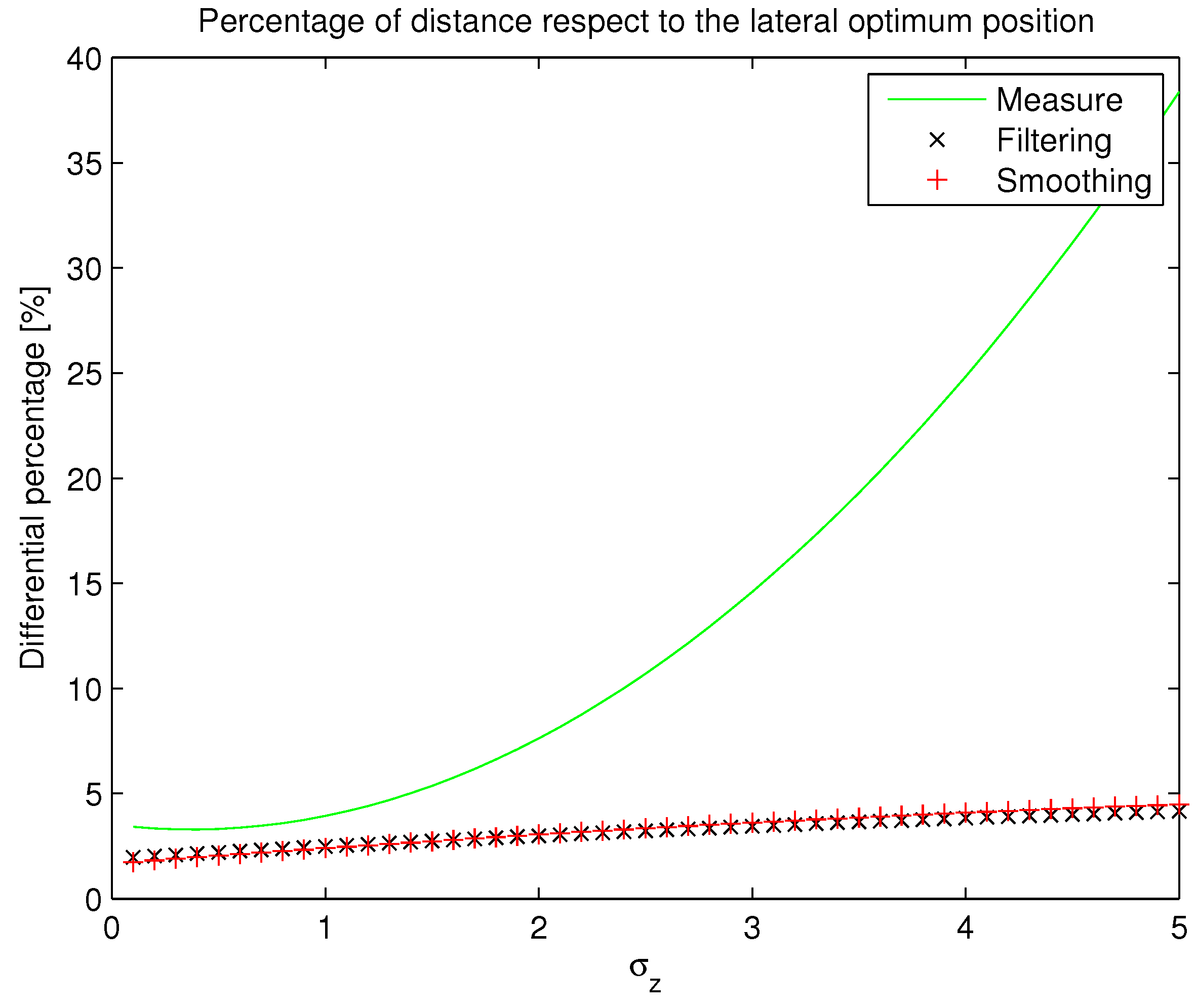
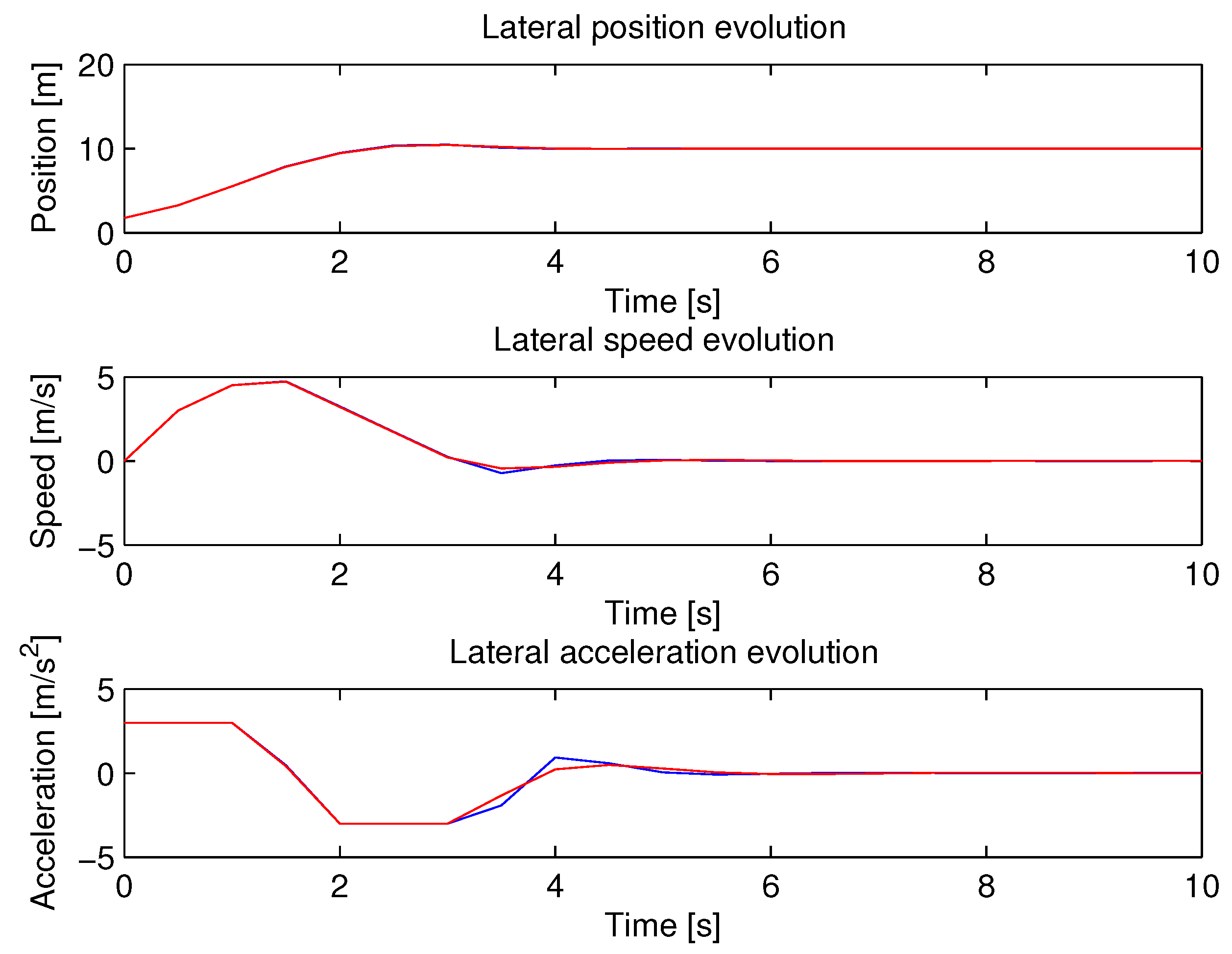
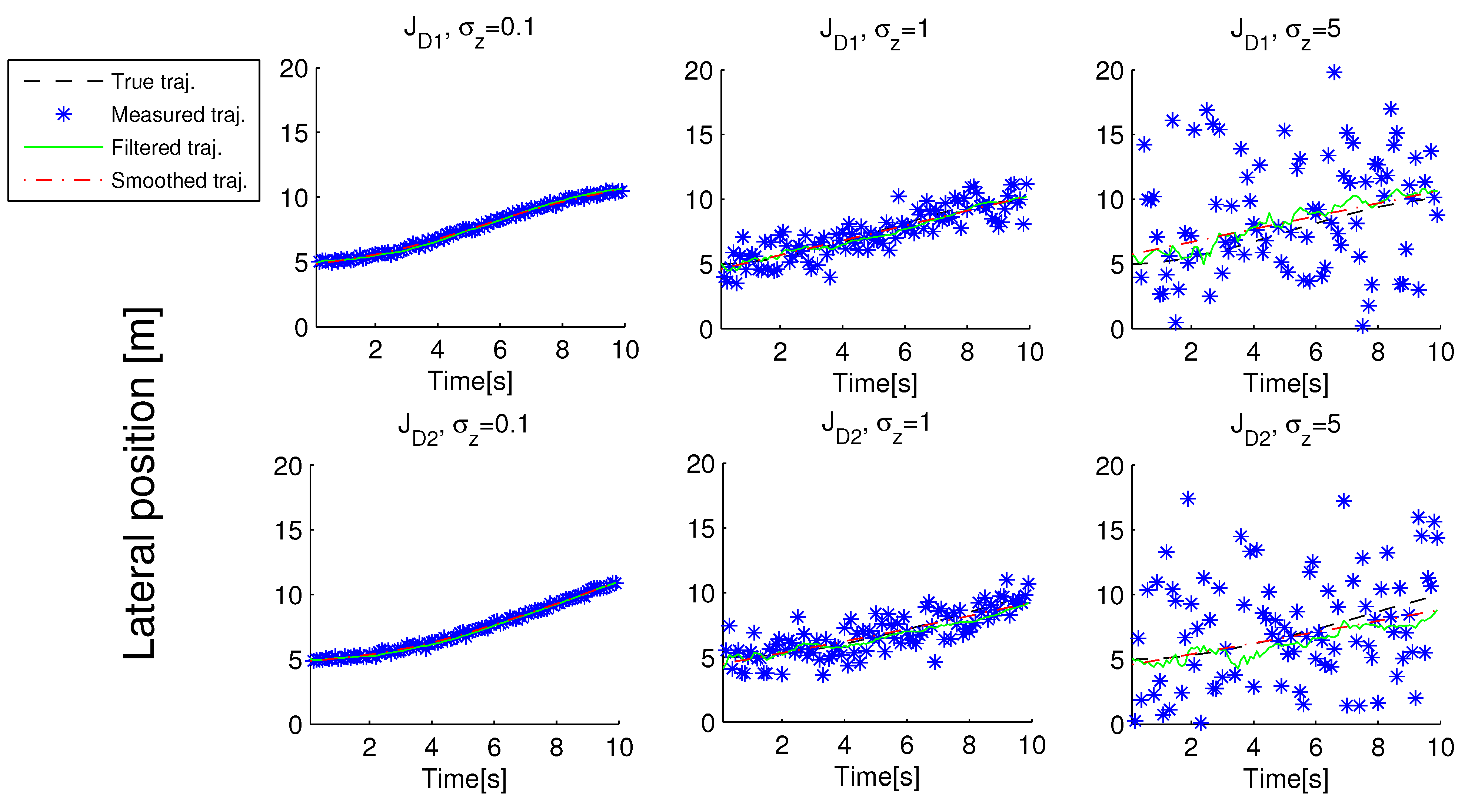
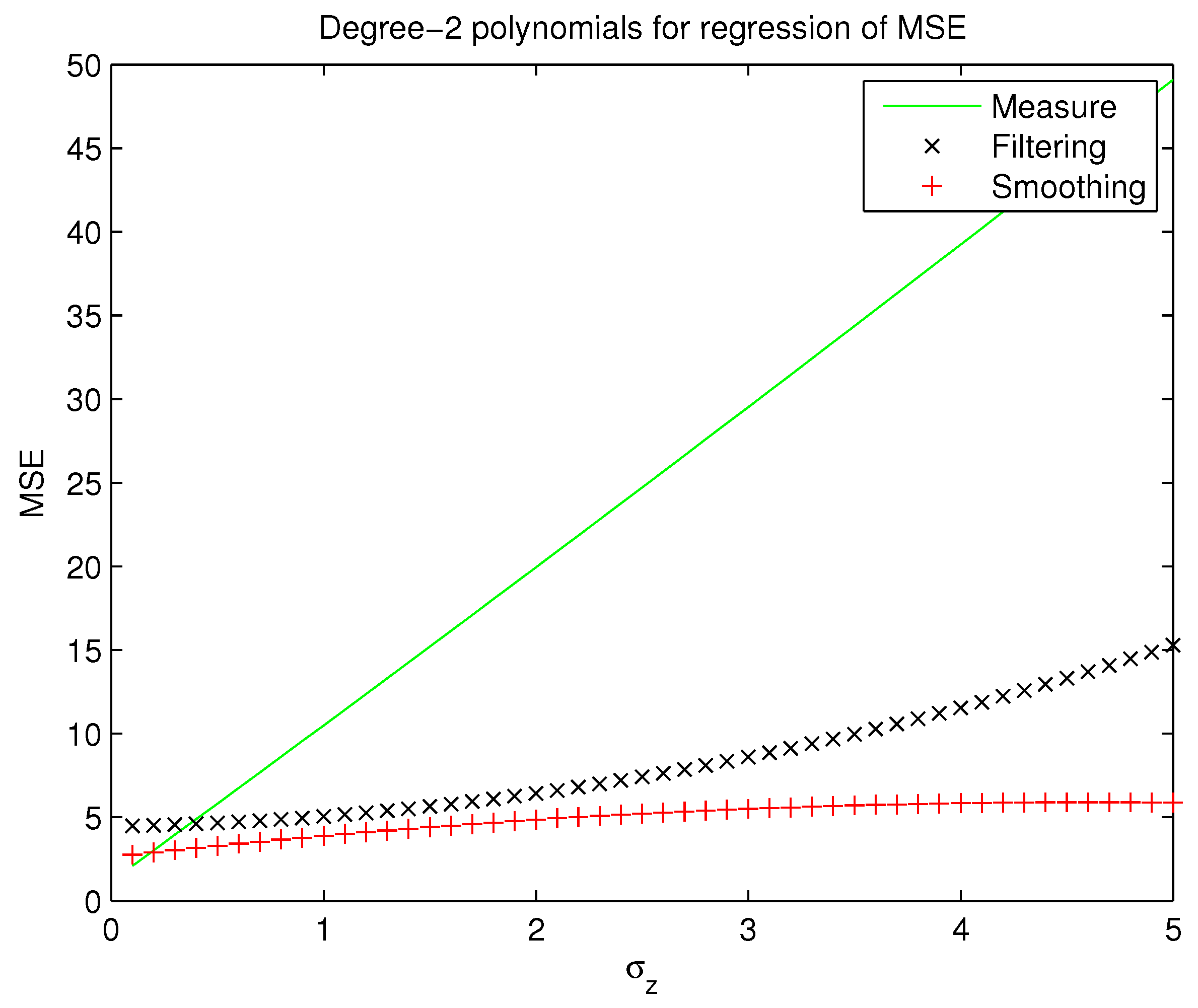
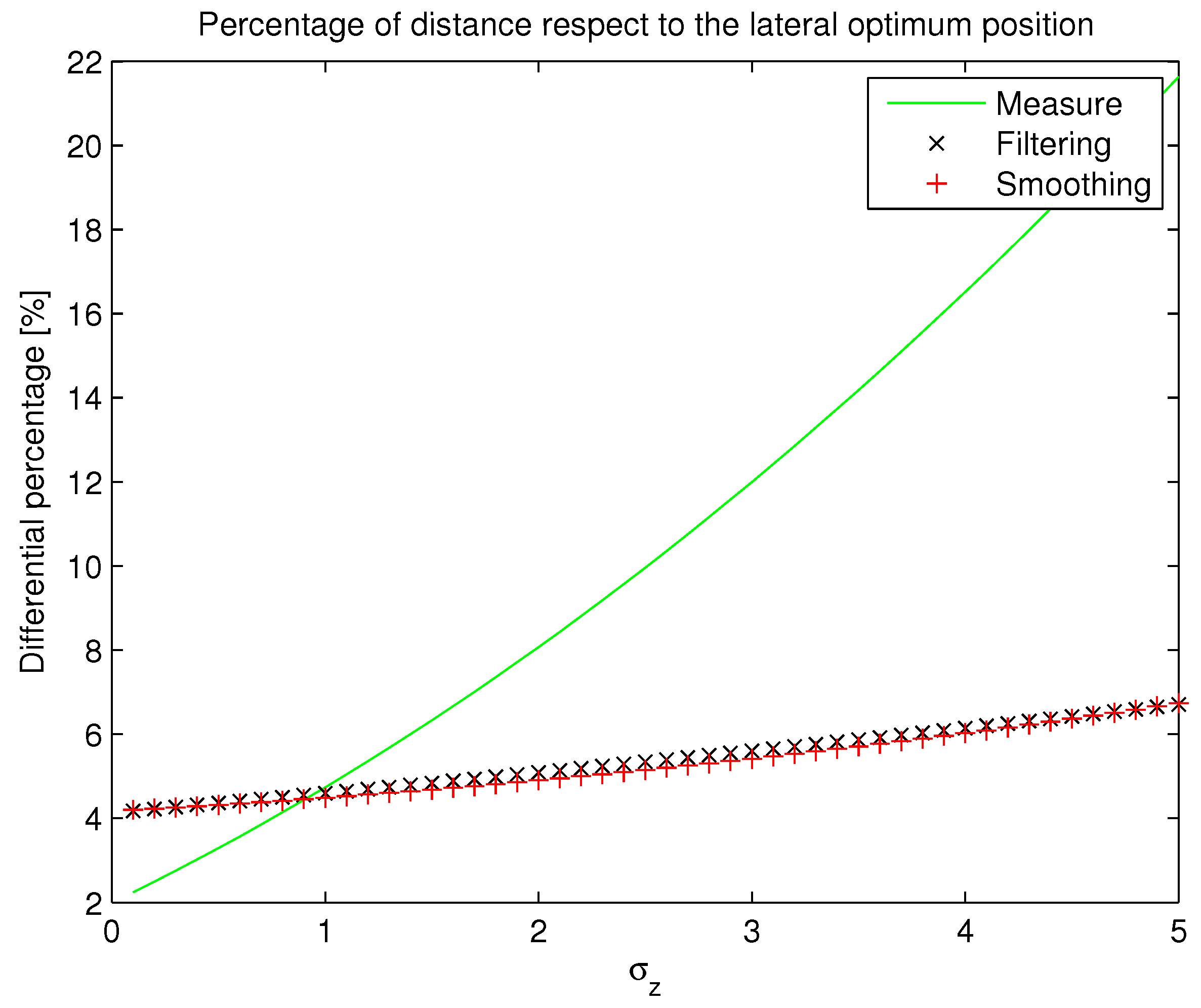
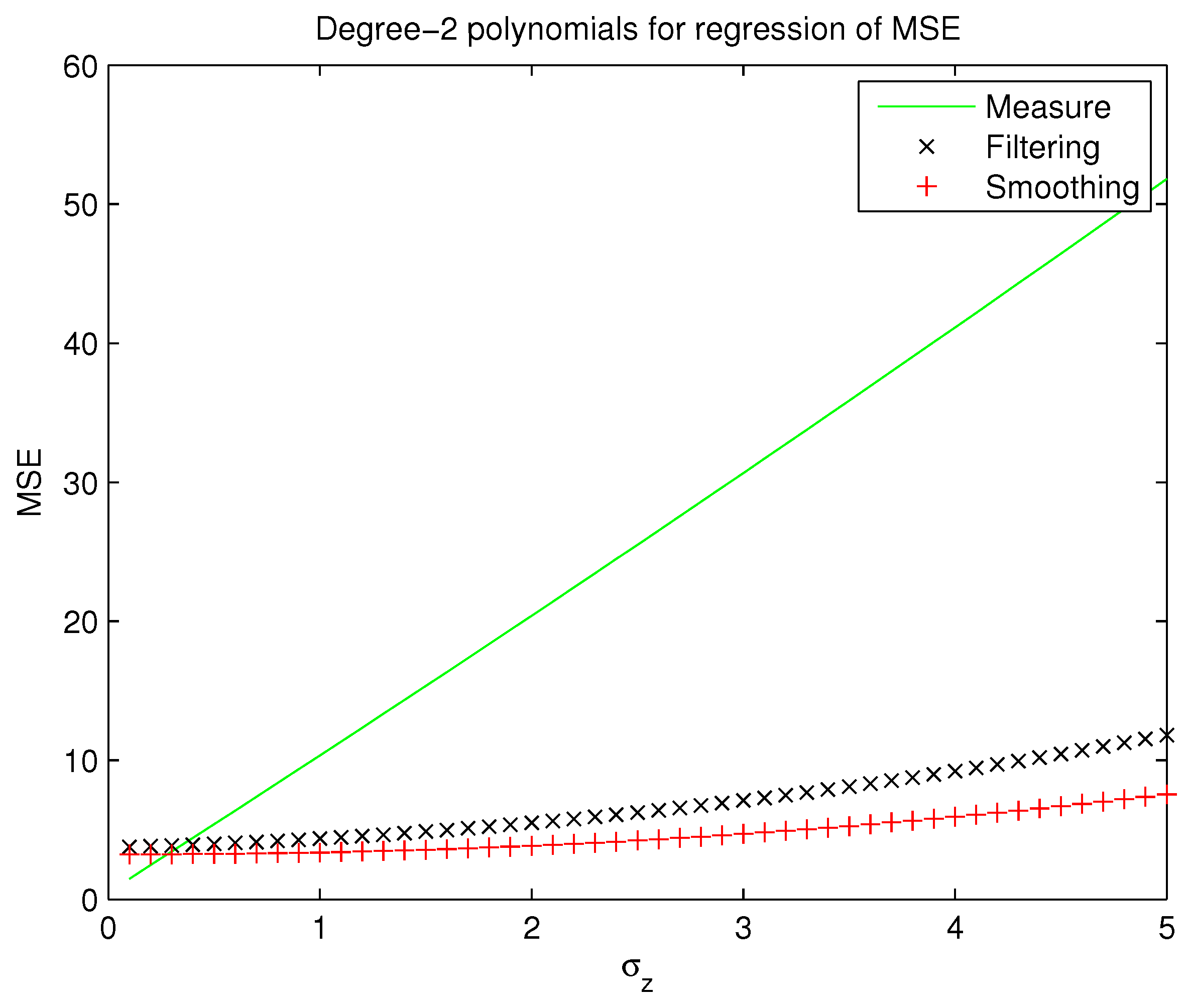
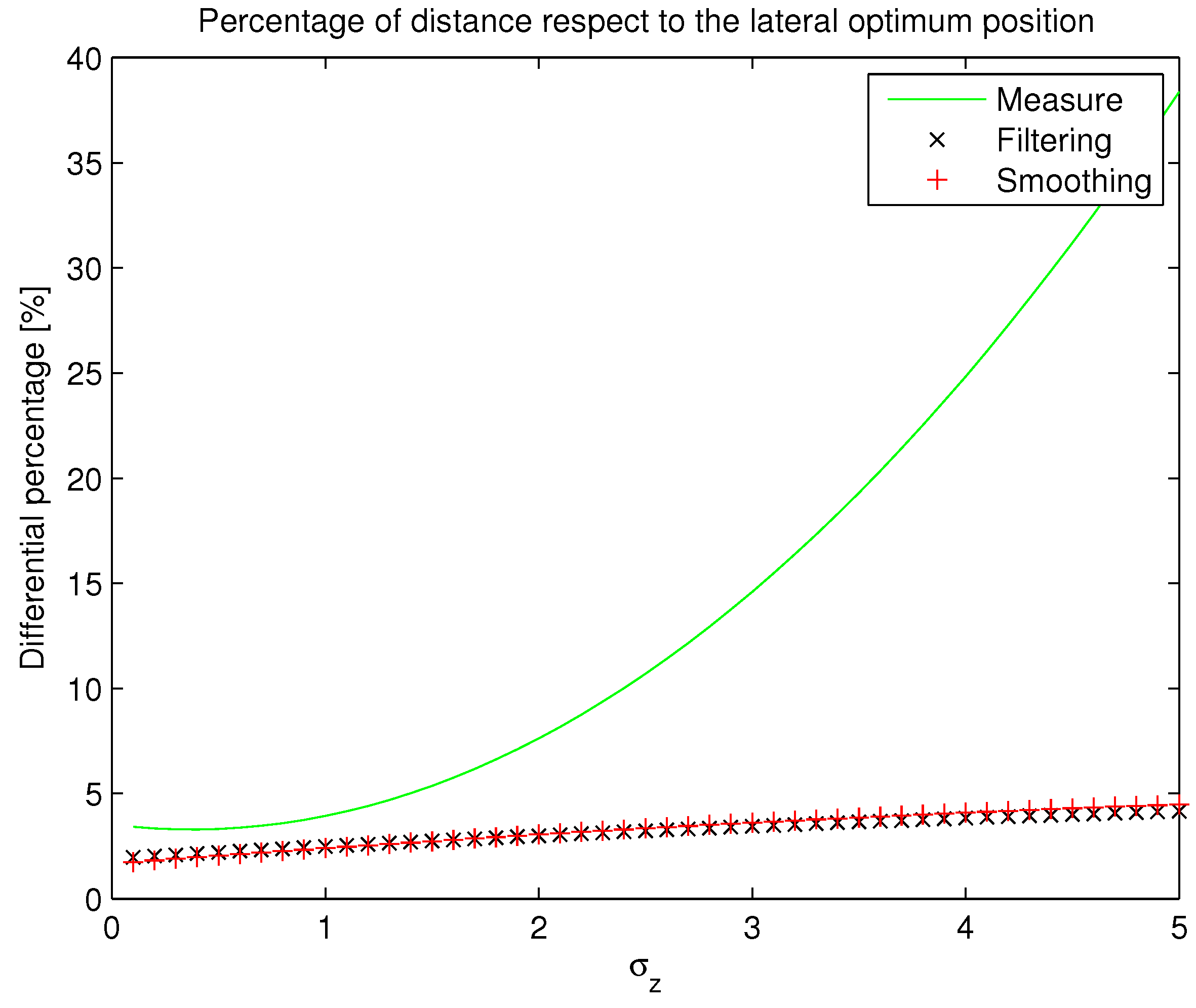
3.5. Kalman Filter for Trajectory Smoothing
- The shape of the traced path due to possible deviations from the optimum course, see Subsection 3.5.1.
- The sensors’ measurement on the position and speed at a fixed time t, see Subsection 3.5.2.
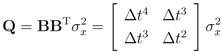
3.5.1. State Variability


3.5.2. Measurements Variability



 being the derivative of lateral position with respect to time (speed v (k)).
being the derivative of lateral position with respect to time (speed v (k)). 

- Filtering. By means of this process, the Kalman Filter predicts the new values x (k) of the states taking into account the states’ history until the instant (k − 1). (Although the term “Kalman Filter” regards all techniques to reduce the influence of noise on the states of a dynamical system, we must not get confused with Filtering, which, as well as Smoothing, describes a specific procedure to fix or reduce trajectory dispersion caused by any noise process.)
- Smoothing. In this second process, the Kalman Filter estimates the new values x (k) of the states taking into account, apart from the states’ history until the instant (k − 1), the current measurement of the states: z (k).
3.6. Connection to Cooperative Collision Avoidance (CCA)
4. Conclusions
Acknowledgments
References
- National Spanish Traffic Administration. Annual Report of Accidents; DGT (Direccion General de Trafico), Ministry of inner affairs, Government of Spain: Madrid, Spain, 2010. Available online: http://www.dgt.es/portal/es/seguridad_vial/estadistica/publicaciones/anuario_estadistico/ (accessed on 19 December 2012).
- Ili, S.; Albers, A.; Miller, S. Open innovation in the automotive industry. R&D Manag. 2010, 40, 246–255. [Google Scholar]
- IEEE (Institute of Electrical and Electronics Engineers), IEEE Draft Standard for Wireless Access in Vehicular Environments (WAVE)-Networking Services; 1609.1-4; IEEE: New York, NY, USA, 2010.
- Dingle, P.; Guzzella, L. Optimal emergency maneuvers on highways for passenger vehicles with two-and four-wheel active steering. In Proceedings of American Control Conference (ACC) Woburn, MA, USA, 30 June 2010-July 2010; pp. 5374–5381.
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Venkatraman, A.; Bhat, S.P. Optimal planar turns under acceleration constraints. In Proceedings of 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 235–240.
- Anisi, D.A.; Hamberg, J.; Hu, X. Nearly time optimal paths for a ground vehicle. J. Control Theory Appl. 2003, 1, 2–8. [Google Scholar] [CrossRef]
- Tjahjana, H.; Pranoto, I.; Muhammad, H.; Naiborhu, J. The numerical control design for a pair of Dubin’s vehicles. In Proceedings of the International Conference on Intelligent Unmanned System (ICIUS 2007), Bali, Indonesia, 24–25 October 2007.
- Naranjo, J.E.; Gonzalez, C.; Garcia, R.; de Pedro, T.; Haber, R.E. Power-steering control architecture for automatic driving. IEEE Trans. Intell. Transp. Syst. 2005, 6, 406–415. [Google Scholar]
- Naranjo, J.E.; Gonzalez, C.; de Pedro, T.; Garcia, R.; Alonso, J.; Sotelo, M.A.; Fernandez, D. AUTOPIA architecture for automatic driving and maneuvering. In Proceedings of Intelligent Transportation Systems Conference, Madrid, Spain, 17–20 Septemper 2006; pp. 1220–1225.
- Kirk, D.E. Optimal Control Theory: An Introduction; Prentice-Hall: London, UK, 1971. [Google Scholar]
- Stratonovich, R.L. Topics in the Theory of Random Noise; Gordon and Breach: New York, NY, USA, 1963. [Google Scholar]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Eichler, S. Performance evaluation of the IEEE 802.11p WAVE communication standard. In Proceedings of 2007 IEEE 66th Vehicular Technology Conference (VTC-2007 Fall), Munich, Germany, 30 September-3 October 2007; pp. 2199–2203.
- Vinel, A. 3GPP LTE versus IEEE 802.11p/WAVE: Which technology is able to support cooperative vehicular safety applications? IEEE Wirel. Commun. Lett. 2012, 1, 125–128. [Google Scholar]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Tomas-Gabarron, J.-B.; Egea-Lopez, E.; Garcia-Haro, J. Optimization of Vehicular Trajectories under Gaussian Noise Disturbances. Future Internet 2013, 5, 1-20. https://doi.org/10.3390/fi5010001
Tomas-Gabarron J-B, Egea-Lopez E, Garcia-Haro J. Optimization of Vehicular Trajectories under Gaussian Noise Disturbances. Future Internet. 2013; 5(1):1-20. https://doi.org/10.3390/fi5010001
Chicago/Turabian StyleTomas-Gabarron, Juan-Bautista, Esteban Egea-Lopez, and Joan Garcia-Haro. 2013. "Optimization of Vehicular Trajectories under Gaussian Noise Disturbances" Future Internet 5, no. 1: 1-20. https://doi.org/10.3390/fi5010001