
Series Arc Fault Detection Algorithm Based on Autoregressive Bispectrum Analysis

 ,
,
Abstract
:1. Introduction
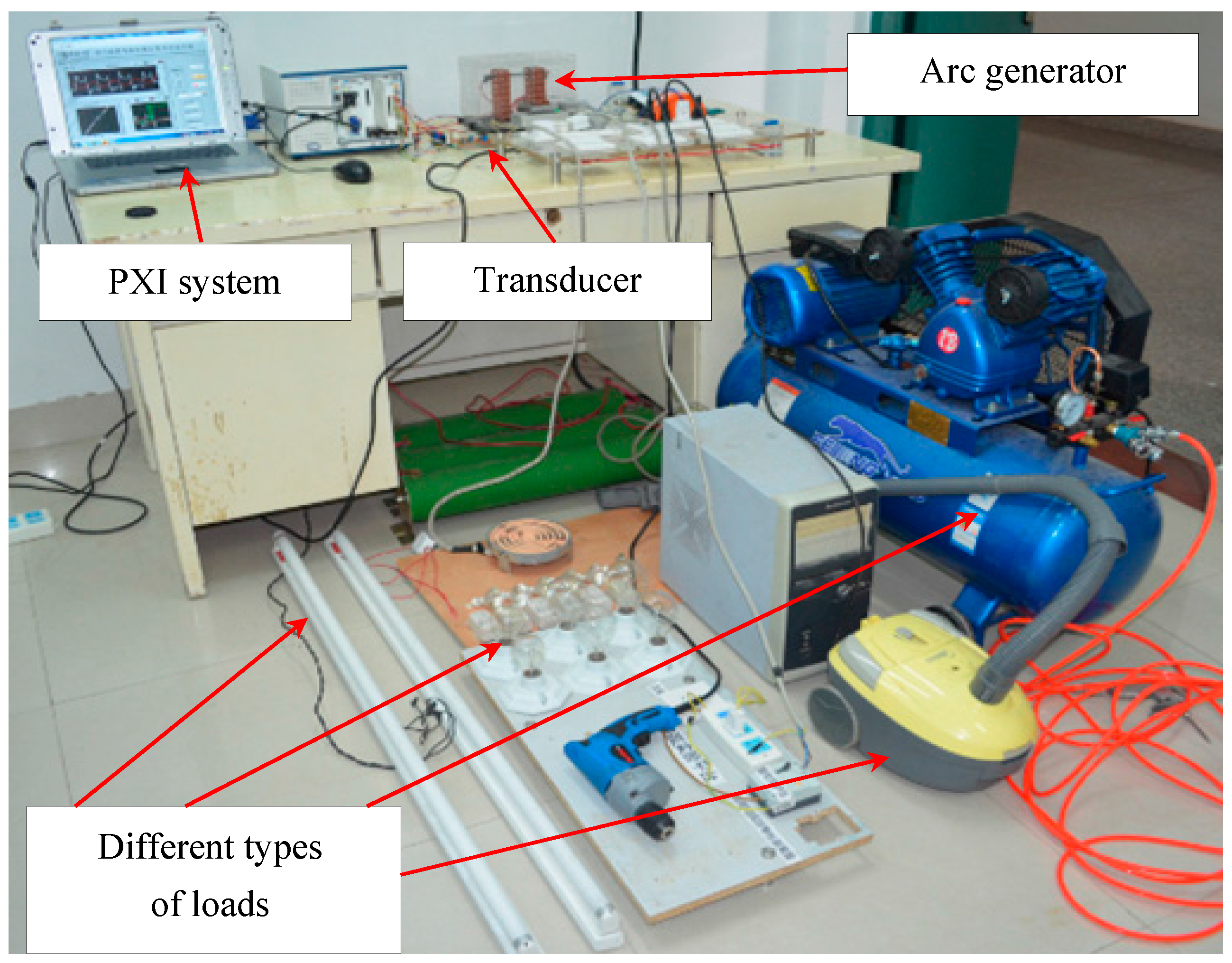
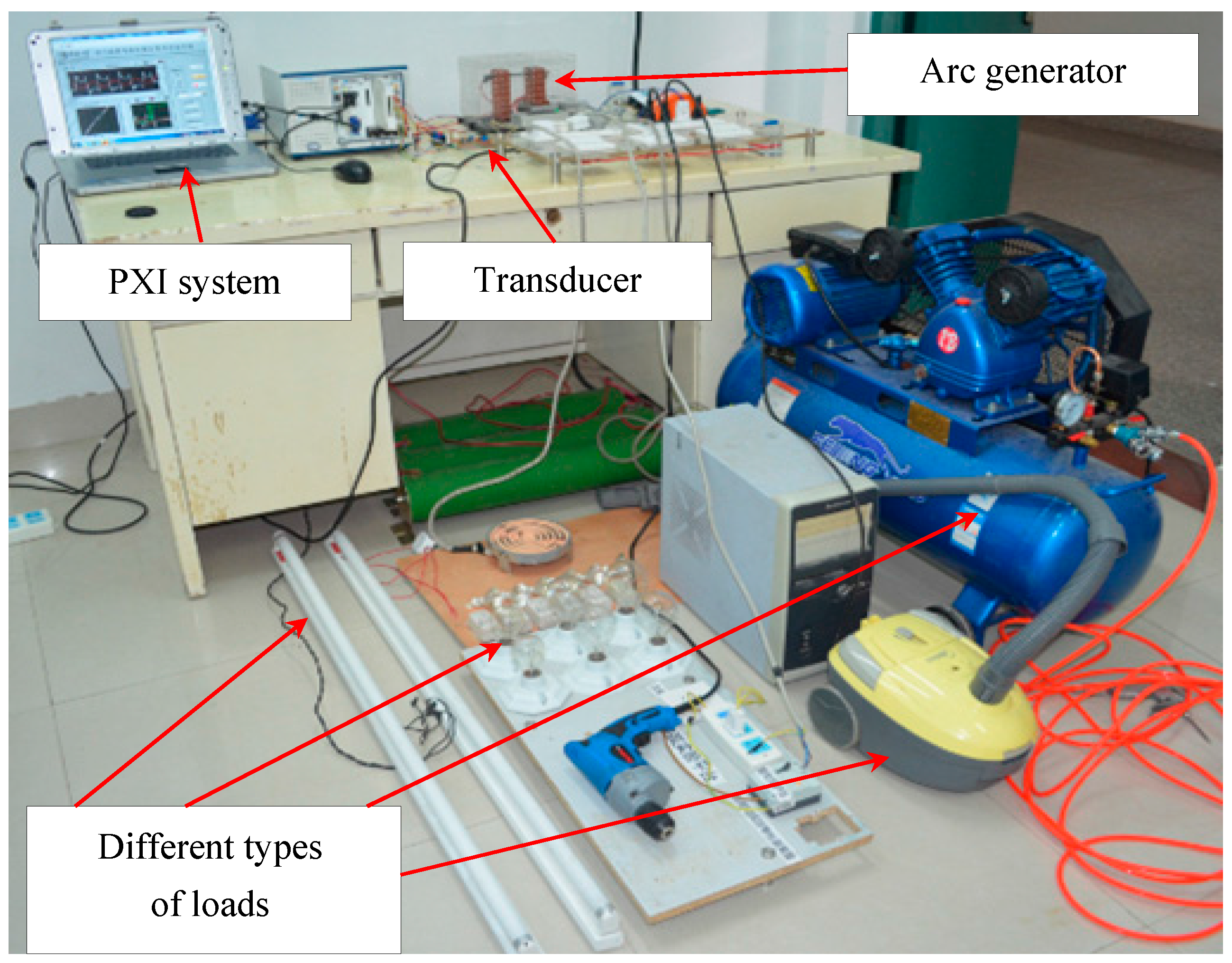
2. Experimental Platform
3. Signal Analysis
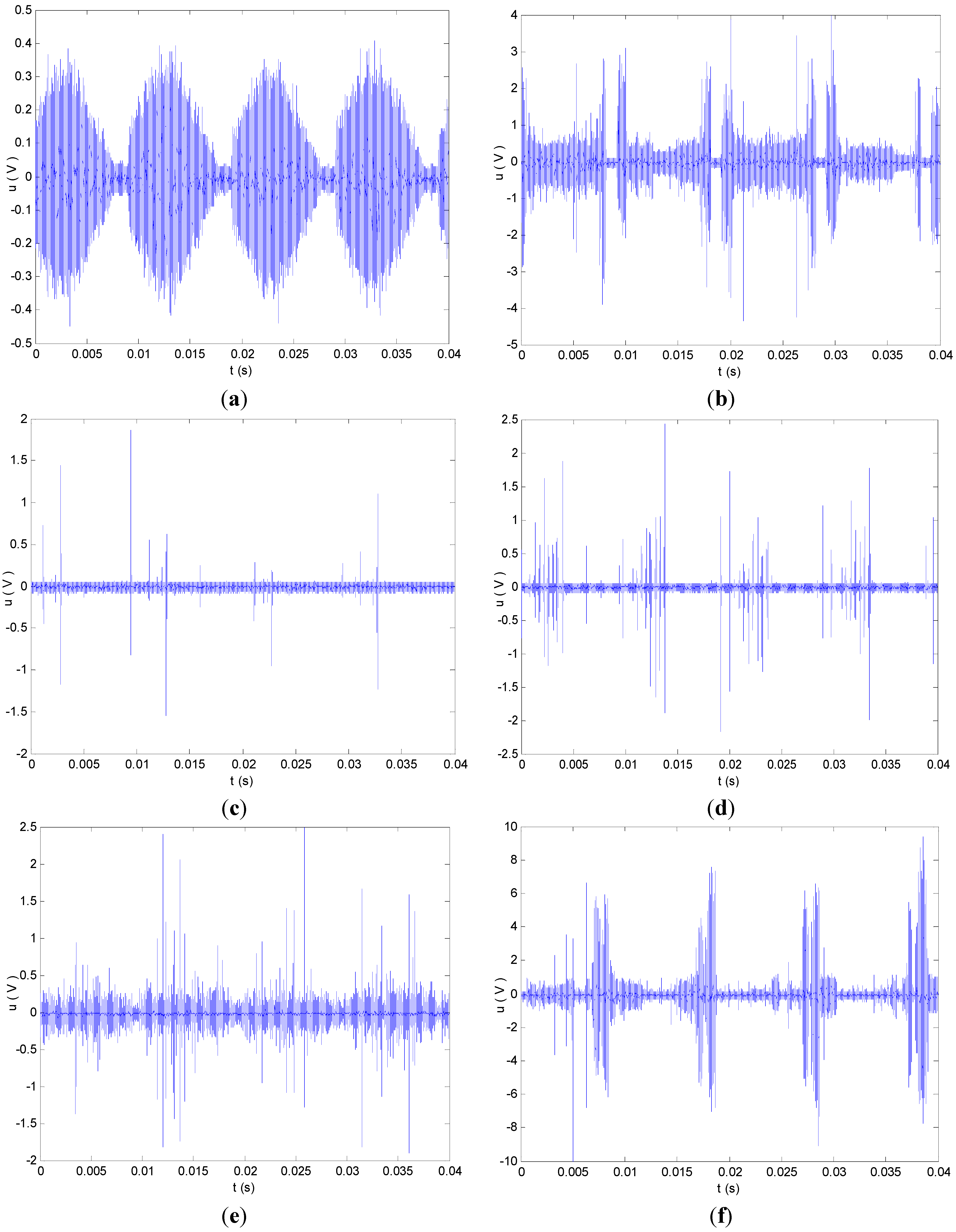
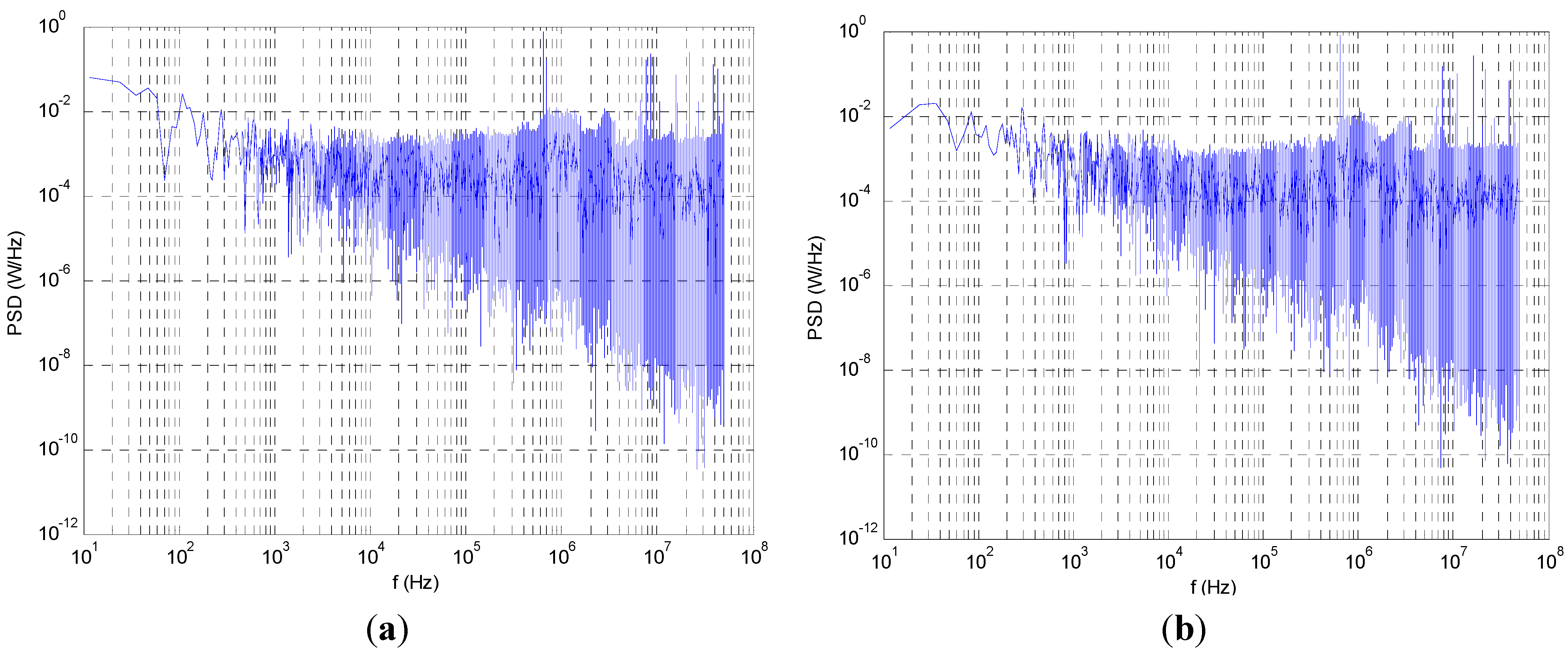
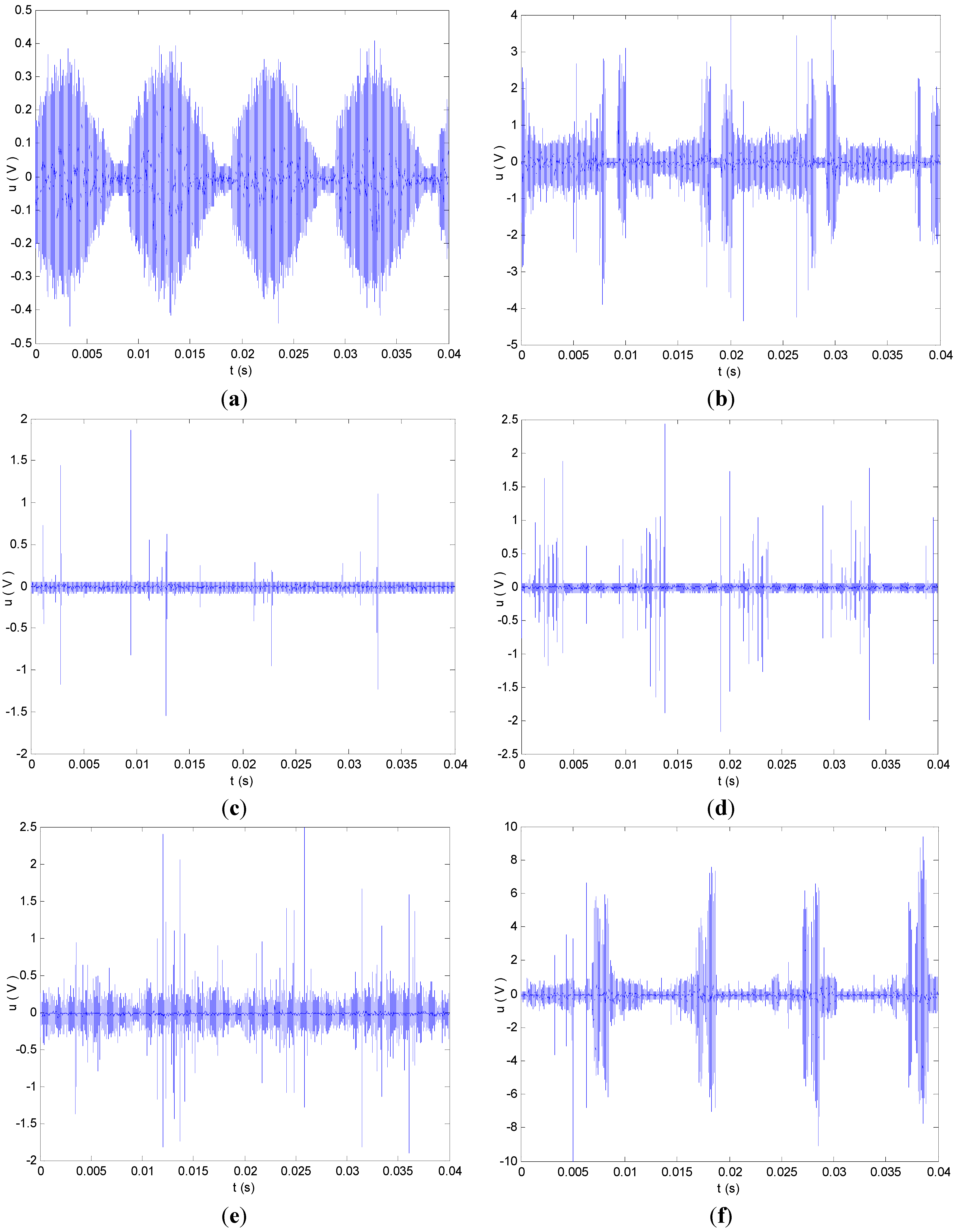
3.1. Conventional Time-Frequency Analysis
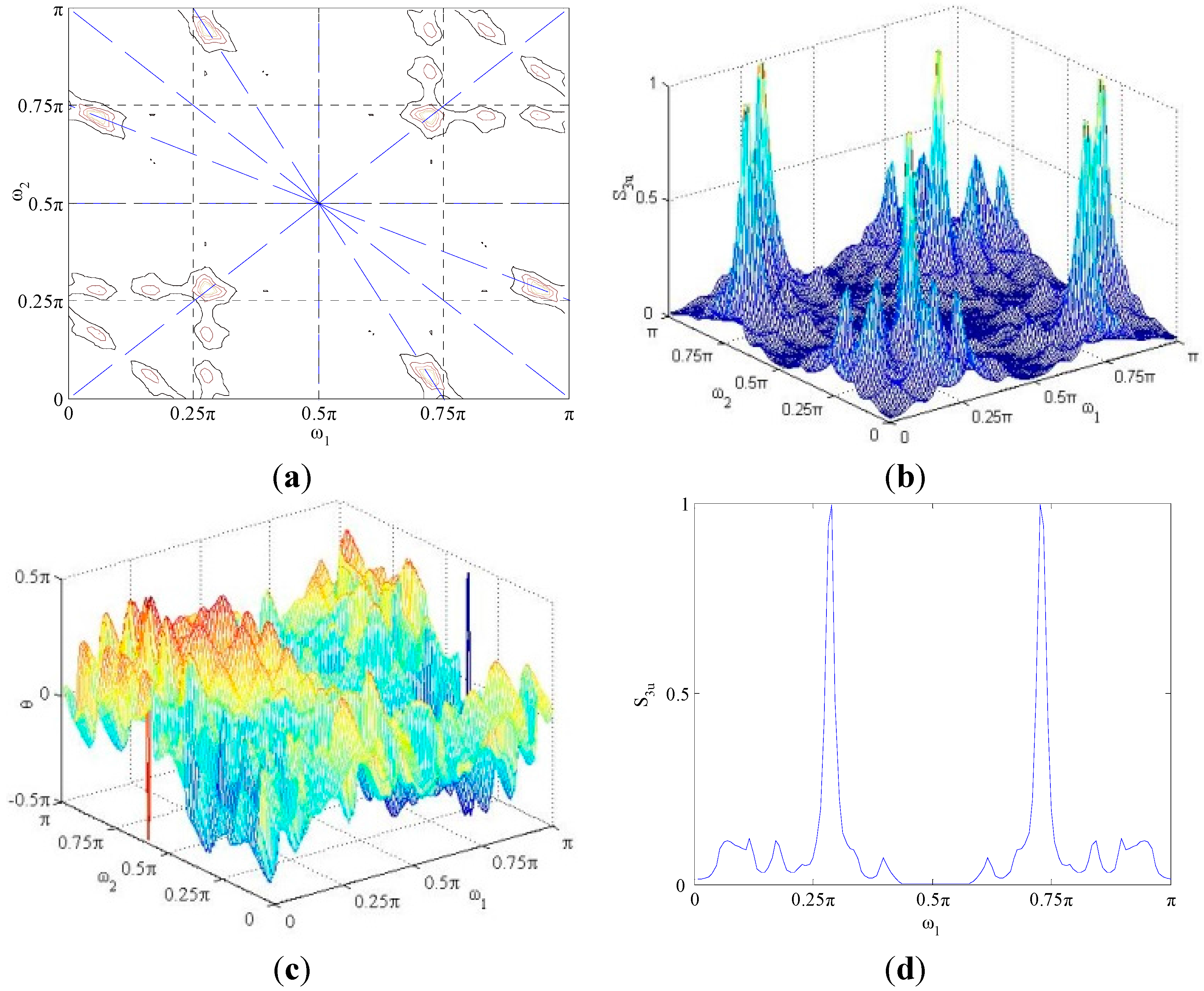
3.2. Bispectrum Analysis
3.2.1. AR Model and Third-Order Cumulants
3.2.2. AR Bispectrum
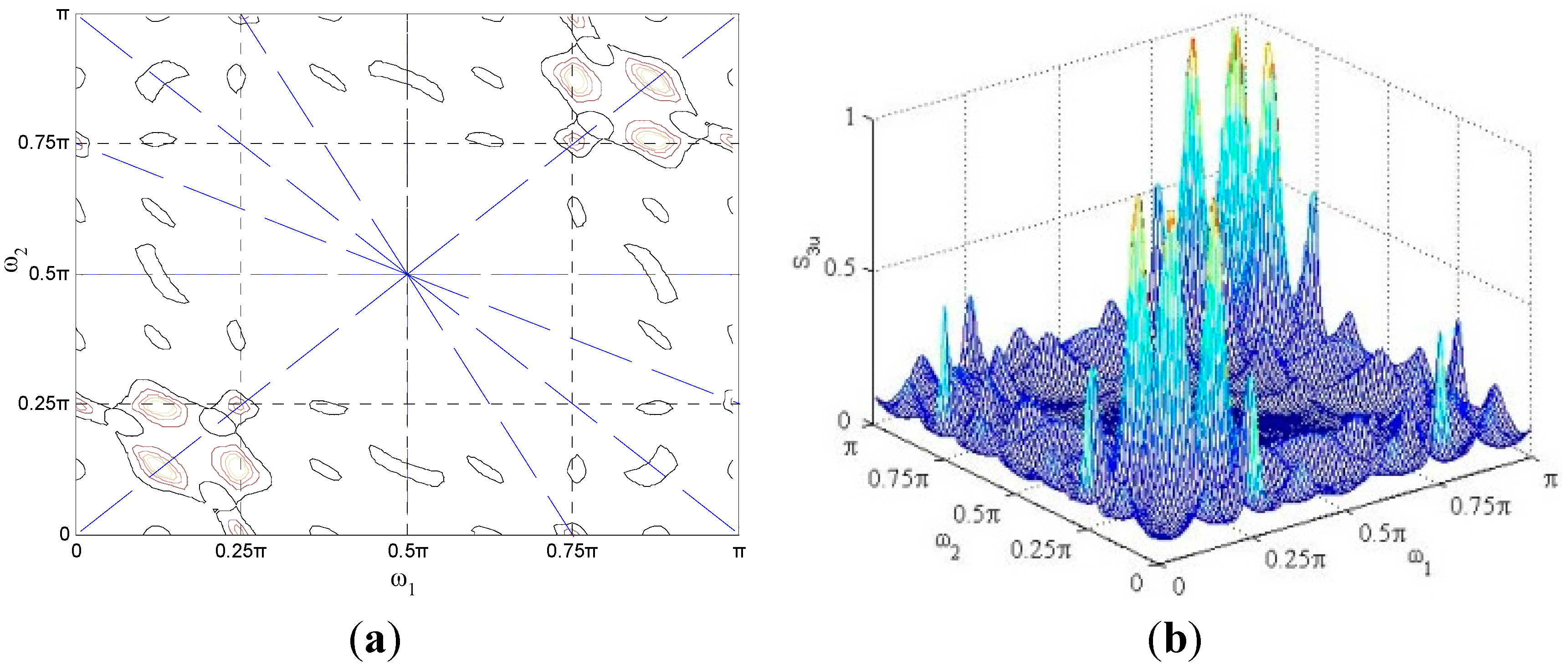
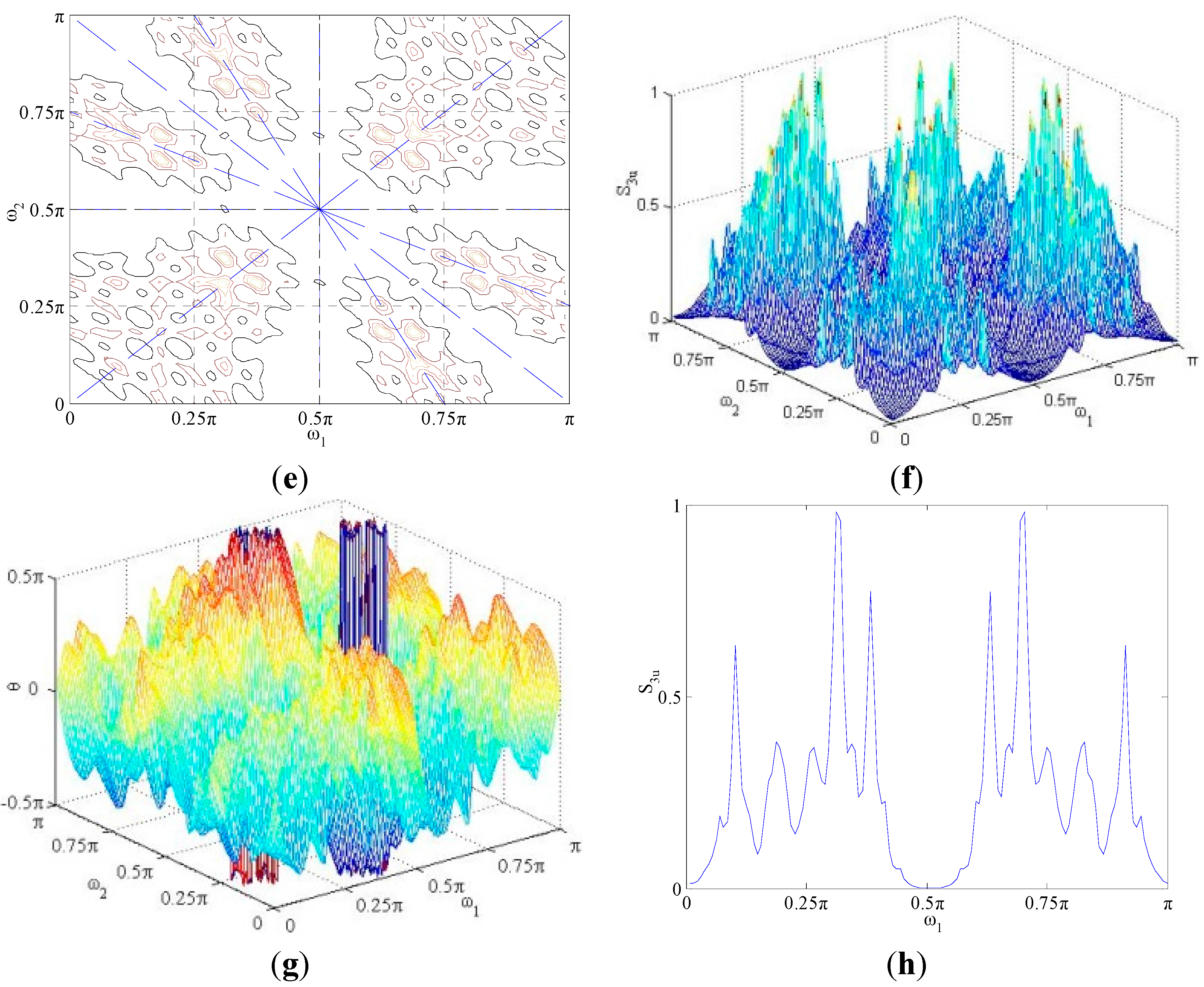
3.2.3. Bispectrum Features of Arc Faults




4. Arc Fault Identification
- (1)
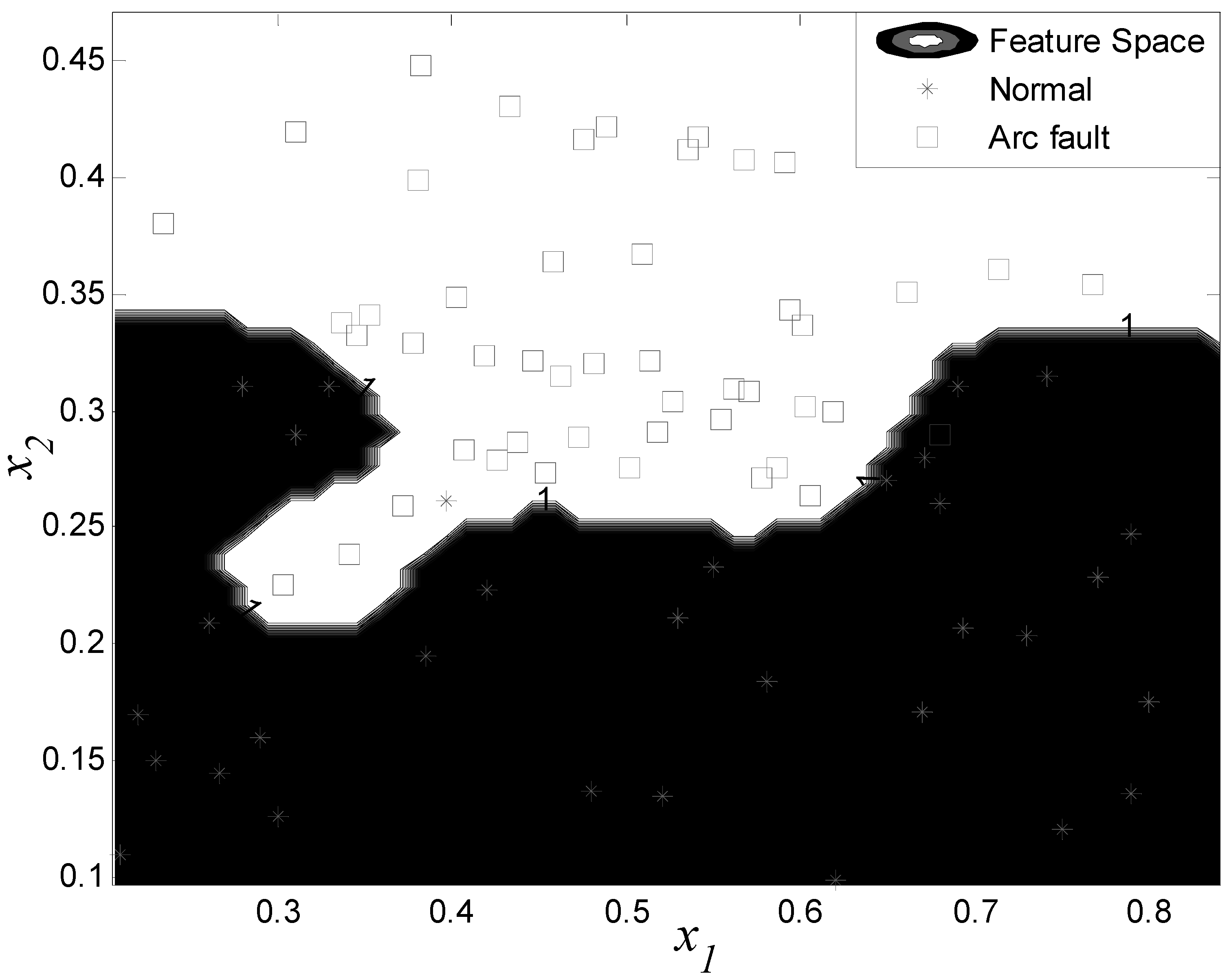
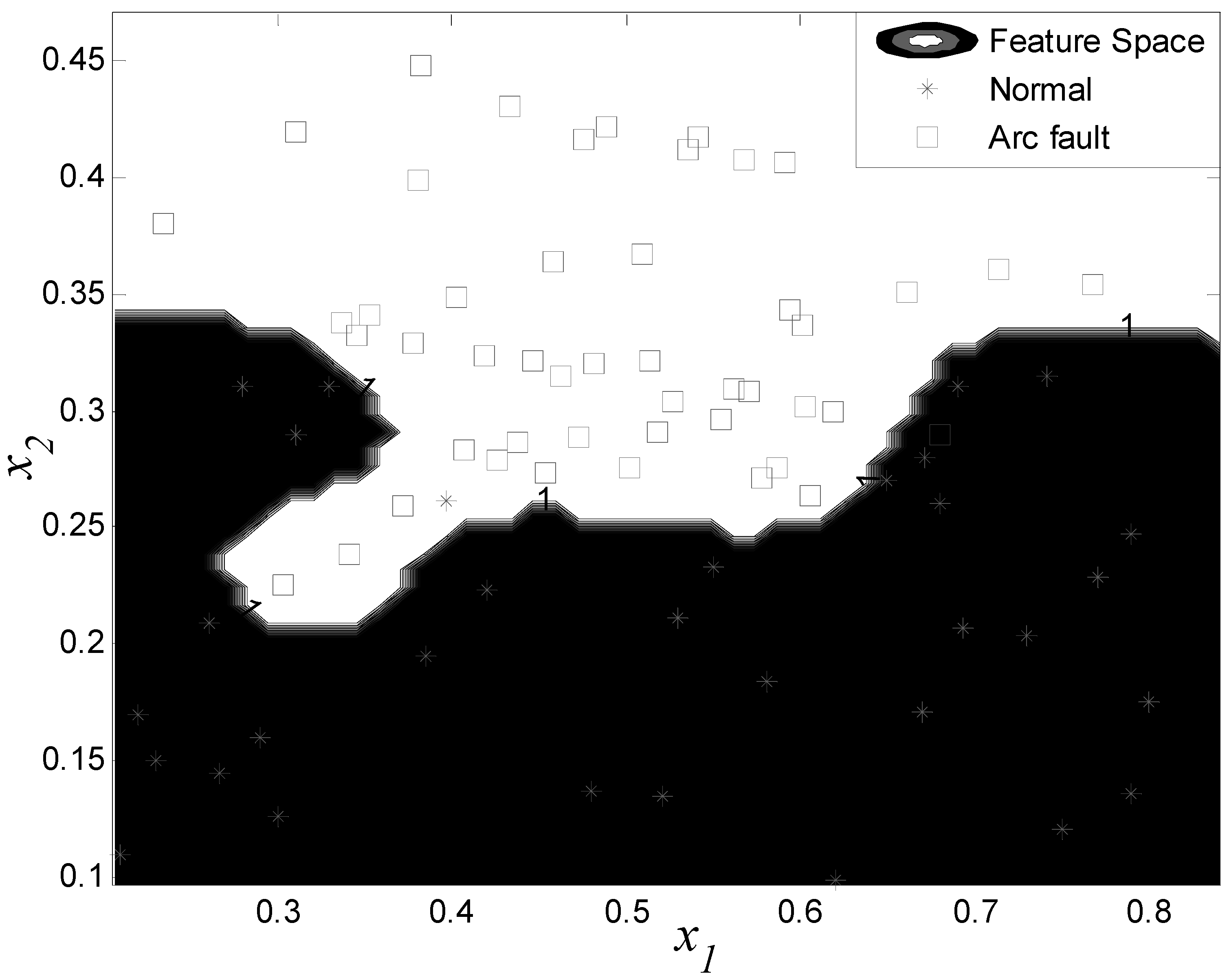
- Selection of sample set for LSSVM. The input used the feature vector x including the frequencies and . The output was the classification result y. The status of output contained −1 and 1. The “−1” represented the normal state and “1” represented arc fault state.
- (2)
- Construction of the training set (x, y). From the experimental data of nine types of typical loads in different working states, three hundred and sixty samples were chosen for further processing. Two hundred and eighty samples of those samples were treated as the training samples and the remainder were treated as testing samples. The training set of recognizer was listed in Table 1.
Table 1. The training set of recognizer. Samples 1 2 3 … 280 x1 0.1521π 0.3534π 0.6171π … 0.8051π x2 0.2213π 0.2514π 0.3502π … 0.1586π y −1 1 1 … −1 - (3)
- Selection of LSSVM parameters. The RBF can be described aswhere σ2 is the kernel parameter. At first, the initial kernel parameter σ2 and the penalty parameter C were selected. Then, the ten-fold cross-validation method was applied to optimize the parameters through the training set. According to the method, the training set was equally divided into ten subsets which were mutually disjoint. The entire method would be repeated ten times. Each time, one of the ten subsets was selected as a new test subset and the other nine subsets were placed together to form a new training subset. The nine subsets were used for training and the tenth subset was used for testing. After repeating ten times, the average error of the ten trials was computed. Finally, the optimal parameters were obtained when the error was the minimum [49].
- (4)
- Arc fault identification. The testing samples were input into the arc fault recognizer. Then the identification results were compared with the real results. Finally, the generalization ability of recognizer was evaluated based on error rate which could be calculated aswhere p was the number of testing samples and was the classification result.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actual Results | Classified Results | |
|---|---|---|
| Normal | Arc Fault | |
| Normal | 96.875% | 3.125% |
| Arc Fault | 2.083% | 97.917% |
5. Conclusions
- (1)
- High frequency signals of circuits increase frequently when series arc faults occur in circuits, but they are usually mixed with much interference.
- (2)
- An AR model of arc fault is established to describe the coupling relationship of the mixed high frequency signals and reflect the dynamic characteristics of arc faults.
- (3)
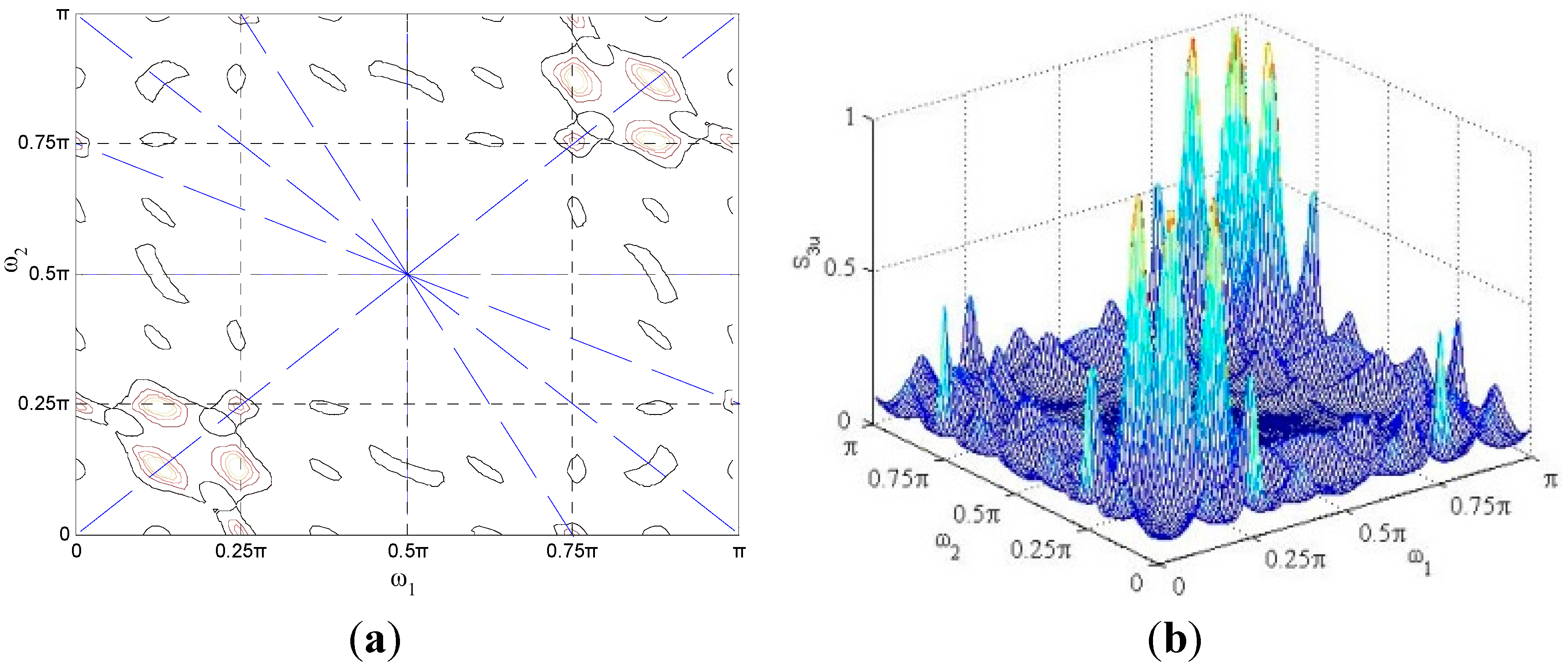
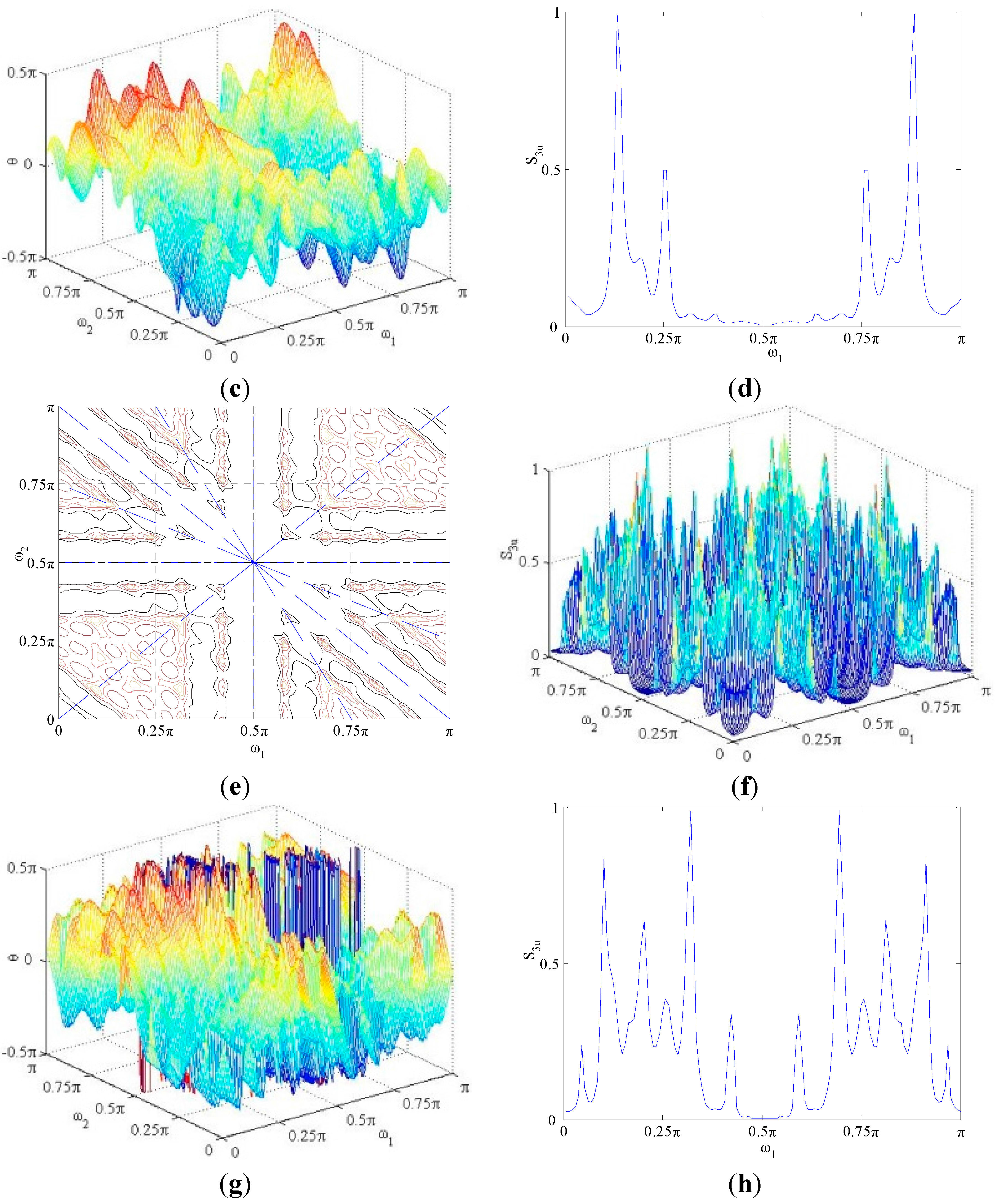
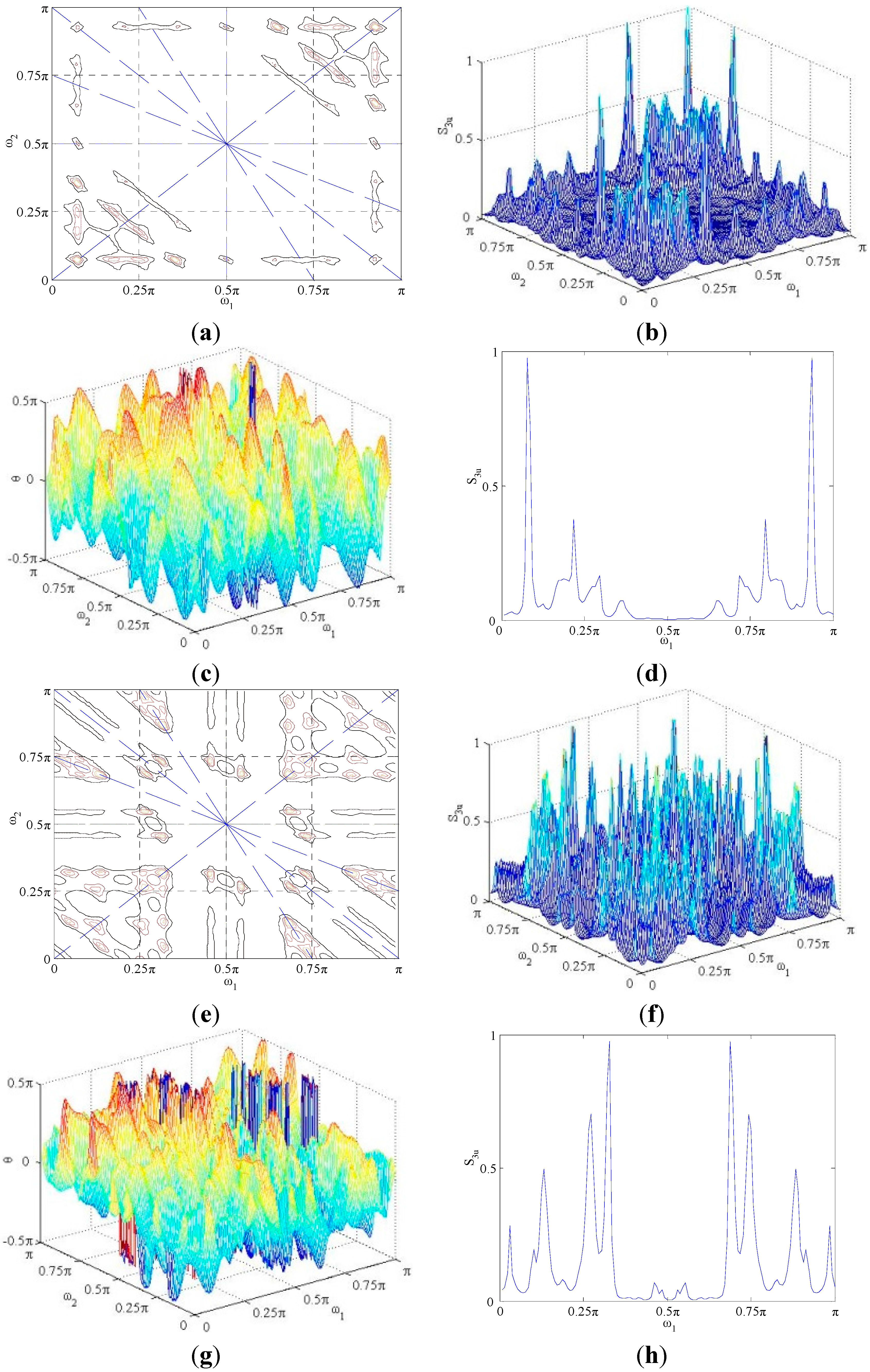
- According to the AR bispectrum analysis on nine types of typical experimental loads which are mentioned in electrical standards, the signal phase information of arc fault is kept and the influence of noise such as Gaussian noise is restrained effectively. AR bispectrum analysis is more effective than power spectrum and time-domain analysis. When series arc faults occur, the numbers of spectrum peaks increase obviously; the distribution of spectrum peaks tends to diffuse and the bispectrum slices are also dispersed. To better describe series arc faults, bispectrum frequency features including distribution regularities of bispectrum peaks are extracted as support vectors.
- (4)
- Based on the above features of bispectrum, LSSVM is successfully used to discriminate arc faults from working states in different loads. The whole algorithm has been well run in the computer and has been verified through the arc fault experimental platform. The arc fault detection rate is over 97%. The result shows that the developed algorithm has good generalization ability in different loads’ arc fault detection. For future research, in terms of algorithm improvement, arc fault detection rate will be further advanced. Furthermore, this algorithm may be applied in direct current (DC) arc fault detection, such as arc faults in photovoltaic systems and automotive power supply systems.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fire Department of Ministry of Public Security. China Fire Services (2014); Yunnan People’s Publishing House: Kunming, China, 2014; pp. 396–407. (In Chinese) [Google Scholar]
- Si, G. Analysis on China’s electrical fire situation and feature from 2008 to 2012. Fire Sci. Technol. 2014, 33, 569–572. [Google Scholar]
- Vadoli, C.N. Lessons learned from electrical circuit analysis in support of a fire probabilistic risk assessment. In Proceedings of the International Topical Meeting on Probabilistic Safety Assessment and Analysis, Wilmington, NC, USA, 13–17 March 2011; pp. 711–720.
- Lee, D.A.; Trotta, A.M.; King, W.H., Jr. New Technology for preventing residential electrical fires: Arc-fault circuit interrupters (AFCIs). Fire Technol. 2000, 36, 146–162. [Google Scholar] [CrossRef]
- Gregory, G.D.; Wong, K.; Dvorak, R. More about arc-fault circuit interrupters. IEEE Trans. Ind. Appl. 2004, 40, 1006–1011. [Google Scholar] [CrossRef]
- Gammon, T.; Matthews, J. Arcing-fault models for low-voltage power systems. In Proceedings of the IEEE Industrial and Commercial Power Systems Technical Conference, Clearwater Beach, FL, USA, 7–11 May 2000; pp. 119–126.
- Wu, H.R.; Li, X.H.; Stade, D.; Schau, H. Arc fault model for low voltage AC systems. IEEE Trans. Power delivery. 2005, 20, 1204–1205. [Google Scholar] [CrossRef]
- Parise, G.; Martirano, L.; Laurini, M. Simplified arc-fault model: The reduction factor of the arc current. IEEE Trans. Ind. Appl. 2013, 49, 1703–1710. [Google Scholar] [CrossRef]
- Andrea, J.; Schweitzer, P.; Martel, J.M. Arc fault model of conductance application to the UL1699 tests modeling. In Proceedings of the 2011 IEEE 57th Holm Conference on Electrical Contacts, Minneapolis, MN, USA, 11–14 September 2011; pp. 37–42.
- Yang, J.H.; Zhang, R.C.; Du, J.H. Study on application of arcing protective system faults based on multiple information fusion. High Voltage Appar. 2007, 43, 194–196. (In Chinese) [Google Scholar]
- Zhang, R.C.; Yang, J.H.; Du, J.H. Study on in-process detection and diagnosis of faults arc based on early sounds signature and intermittent chaos. Key Eng. Mat. 2008, 381, 611–614. [Google Scholar] [CrossRef]
- Lin, Y.H.; Liu, C.W.; Chen, C.S. A new PMU-based fault detection location technique for transmission lines with consideration of arcing fault discrimination-part I theory and algorithms. IEEE Trans. Power Delivery. 2004, 19, 1587–1593. [Google Scholar] [CrossRef]
- Meyar-Naimi, H.; Hasanzadeh, S.; Sanaye-Pasand, M. Discrimination of arcing faults on overhead transmission lines for single-pole auto-reclosure. Int. Trans. Elecr. Energy Sys. 2013, 23, 1523–1535. [Google Scholar] [CrossRef]
- Charles, J.K. Electromagnetic radiation behavior of low-voltage arcing fault. IEEE Trans. Power Delivery. 2009, 24, 416–423. [Google Scholar]
- Li, J.C.; Kohler, J.L. New insight into the detection of high-impedance arcing faults on DC trolley systems. IEEE Trans. Ind. Appl. 1999, 35, 1169–1173. [Google Scholar]
- Wang, S.C.; Wu, C.J.; Wang, Y.J. Detection of arc fault on low voltage power circuits in time and frequency domain approach. IEEE Trans. Ind. Appl. 2012, 6, 324–331. [Google Scholar]
- Kim, C.H.; Kim, H.; Ko, Y.H.; Byun, S.H.; Aggarwal, R.K.; Johns, A.T. A novel fault-detection technique of high-impedance arcing faults in transmission lines using the wavelet transform. IEEE Trans. Power Delivery. 2002, 17, 921–929. [Google Scholar] [CrossRef]
- Jamali, S.; Ghaffarzadeh, N. A new method for arcing fault location using discrete wavelet transform and wavelet networks. Eur. Trans. Electr. Power 2012, 22, 601–615. [Google Scholar] [CrossRef]
- Wu, C.J.; Hung, C.H.; Liu, Y.W. Smart detection technology of serial arc-fault on low voltage power lines. Adv. Mater. Res. 2013, 734–737, 3190–3193. [Google Scholar] [CrossRef]
- Wu, C.J.; Liu, Y.W. Smart detection technology of serial arc fault on low-voltage indoor power lines. Int. J. Electr. Power Energy Syst. 2015, 69, 391–398. [Google Scholar] [CrossRef]
- Kawady, T.A.; Elkalashy, N.I.; Ibrahim, A.E.; Taalab, A.M.I. Arcing fault identification using combined Gabor Transform-neural network for transmission lines. Int. J. Electr. Power Energy Syst. 2014, 61, 248–258. [Google Scholar] [CrossRef]
- Liu, Y.L.; Guo, F.Y.; Wang, Z.Y.; Chen, C.K.; Li, Y. Research on the Spectral Characteristics of Series Arc Fault Based on Information entropy. Trans. China Electrotech. Soc. 2015, 30, 488–495. (In Chinese) [Google Scholar]
- Chandran, V.; Elgar, S. A general procedure for the derivation of principle domains of higher order spectra. IEEE Trans. Signal. Process. 1994, 42, 229–233. [Google Scholar] [CrossRef] [Green Version]
- Brillinger, D.R. An introduction to polyspectra. Ann. Math. Statist. 1965, 36, 1351–1374. [Google Scholar] [CrossRef]
- Nikias, C.L.; Raghuveer, M.R. Bispectrum estimation a digital signal processing framework. Proc. IEEE 1987, 75, 869–891. [Google Scholar] [CrossRef]
- Sasaki, K.; Sato, T.; Yamashita, Y. Minimum bias windows for bispectral estimation. J. Sound Vib. 1975, 40, 139–148. [Google Scholar] [CrossRef]
- Helland, K.N.; Itsweire, E.C.; Lii, K.S. A program for computation of bispectra with application to spectral energy transfer in fluid turbulence. Adv. Eng. Software 1985, 7, 22–27. [Google Scholar] [CrossRef]
- Nichols, J.; Olson, C.; Michalowicz, J.; Bucholtz, F. The bispectrum and bicoherence for quadratically nonlinear systems subject to non- Gaussian inputs. IEEE Trans. Signal. Process. 2009, 57, 3879–3890. [Google Scholar] [CrossRef]
- Le Caillec, J.M.; Garello, R. Nonlinear system identification using autoregressive quadratic models. Signal Process. 2001, 81, 357–379. [Google Scholar] [CrossRef]
- Raghuveer, M.R.; Nikias, C.L. Bispectrum estimation a parametric approach. IEEE Trans. Acoust. Speech Signal Process. 1985, ASSP-33, 1213–1230. [Google Scholar] [CrossRef]
- Raghuveer, M.R.; Nikias, C.L. Bispectrum estimation via AR modeling. Signal. Process. 1986, 10, 35–48. [Google Scholar] [CrossRef]
- Parker, B.E., Jr.; Ware, H.A.; Wipf, D.P.; Tompkins, W.R.; Clark, B.R.; Larson, E.C.; Poor, H.V. Fault diagnostics using statistical change detection in the bispectral domain. Mech. Syst. Signal. Process. 2000, 14, 561–570. [Google Scholar] [CrossRef]
- Benbouzid, M.E.H. A review of induction motors signature analysis as a medium for faults detection. IEEE Trans. Ind. Electron. 2000, 47, 984–993. [Google Scholar] [CrossRef]
- Gu, F.; Wang, T.; Alwodai, A.; Tian, X.; Shao, Y.; Ball, A.D. A new method of accurate broken rotor bar diagnosis based on modulation signal bispectrum analysis of motor current signals. Mech. Syst. Signal Process. 2015, 50–51, 400–413. [Google Scholar] [CrossRef]
- Kluckers, V.A.; Wooder, N.J.; Dainty, J.C.; Longmore, A.J. Comparison of shift-and-add and bispectrum image reconstruction methods for astronomy in the near infrared. J. Opt. Soc. Am. A. 1996, 13, 1577. [Google Scholar] [CrossRef]
- Totsky, A.V.; Molchanov, P.A.; Khlopov, G.I.; Morozov, V.Y. Bispectrum-based time-frequency distributions used for moving target recognition in ground doppler surveillance radar systems. Telecommun. Radio Eng. 2011, 70, 1797–1812. [Google Scholar] [CrossRef]
- Astola, J.T.; Egiazarian, K.O.; Naumenko, V.V.; Totsky, A.V. Application of software complex for query processing in the database management system with novel noise resistant bispectrum-organized modulation technique in digital wireless communication systems. Telecommun. Radio Eng. 2013, 72, 1639–1649. [Google Scholar] [CrossRef]
- Valenza, G.; Citi, L.; Scilingo, E.P.; Barbieri, R. Point-process nonlinear models with laguerre and volterra expansions: instantaneous assessment of heartbeat dynamics. IEEE Trans. Signal Process. 2013, 61, 2914–2926. [Google Scholar] [CrossRef]
- Orosco, E.; Diez, P.; Laciar, E.; Mut, V.; Soria, C.; Di Sciascio, F. On the use of high-order cumulant and bispectrum for muscular-activity detection. Biomed. Signal Process. Control. 2015, 18, 325–333. [Google Scholar] [CrossRef]
- Pontil, M.; Verri, A. Properties of support vector machines. Neural Comput. 1998, 10, 955–974. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.W.; Tan, L.J.; He, L.F. A robust least squares support vector machine for regression and classification with noise. Neurocomputing 2014, 140, 41–52. [Google Scholar] [CrossRef]
- Suykens, J.A.K.; Vandewalle, J. Least squares support vector machine classifiers. Neural Process. Lett. 1999, 9, 293–300. [Google Scholar] [CrossRef]
- Cheng, Q.; Tezcan, J.; Cheng, J. Confidence and prediction intervals for semiparametric mixed-effect least squares support vector machine. Pattern Recogn. Lett. 2014, 40, 88–95. [Google Scholar] [CrossRef]
- Liu, X.M.; Huang, Y.J.; Li, H.Y. Application of higher order spectral analysis for magnetorheological damper control. J. Cent. South. Univ. Technol. 2008, 15, 256–260. [Google Scholar] [CrossRef]
- Cadzow, J.A. Spectral estimation: an over determined rational model equation approach. Proc. IEEE 1982, 70, 907–939. [Google Scholar] [CrossRef]
- Raghuveer, M.R. Time-domain approaches to quadratic phase coupling estimation. IEEE Trans. Autom. Control. 1990, 35, 48–56. [Google Scholar] [CrossRef]
- Kachenoura, A.; Albera, L.; Bellanger, J.J.; Senhadji, L. Nonminimum phase identification based on higher order spectrum slices. IEEE Trans. Signal Process. 2008, 56, 1821–1829. [Google Scholar] [CrossRef] [Green Version]
- Deng, J.; Xiao, Y.; Hao, Y.P.; Li, L.C.; Zhao, Y.M.; Zhang, J.G. Compound electric field prediction method for the UHVDC transmission lines based on fuzzy clustering and least squares support vector machine. High Voltage Eng. 2013, 39, 2987–2993. (In Chinese) [Google Scholar]
- Han, X.H.; Du, S.H.; Su, J.; Guan, H.O.; Shao, L.M. Determination method of electric shock current based on parameter-optimized least squares support vector machine. Trans. Chin. Soc. Agric. Eng. 2014, 30, 238–245. (In Chinese) [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, K.; Zhang, R.; Chen, S.; Zhang, F.; Yang, J.; Zhang, X. Series Arc Fault Detection Algorithm Based on Autoregressive Bispectrum Analysis. Algorithms 2015, 8, 929-950. https://doi.org/10.3390/a8040929
Yang K, Zhang R, Chen S, Zhang F, Yang J, Zhang X. Series Arc Fault Detection Algorithm Based on Autoregressive Bispectrum Analysis. Algorithms. 2015; 8(4):929-950. https://doi.org/10.3390/a8040929
Chicago/Turabian StyleYang, Kai, Rencheng Zhang, Shouhong Chen, Fujiang Zhang, Jianhong Yang, and Xingbin Zhang. 2015. "Series Arc Fault Detection Algorithm Based on Autoregressive Bispectrum Analysis" Algorithms 8, no. 4: 929-950. https://doi.org/10.3390/a8040929