
Study on the Current-Limiting-Capable Control Strategy for Grid-Connected Three-Phase Four-Leg Inverter in Low-Voltage Network


Abstract
:1. Introduction
2. Control Strategy of the Three-Phase Four-Leg Inverter
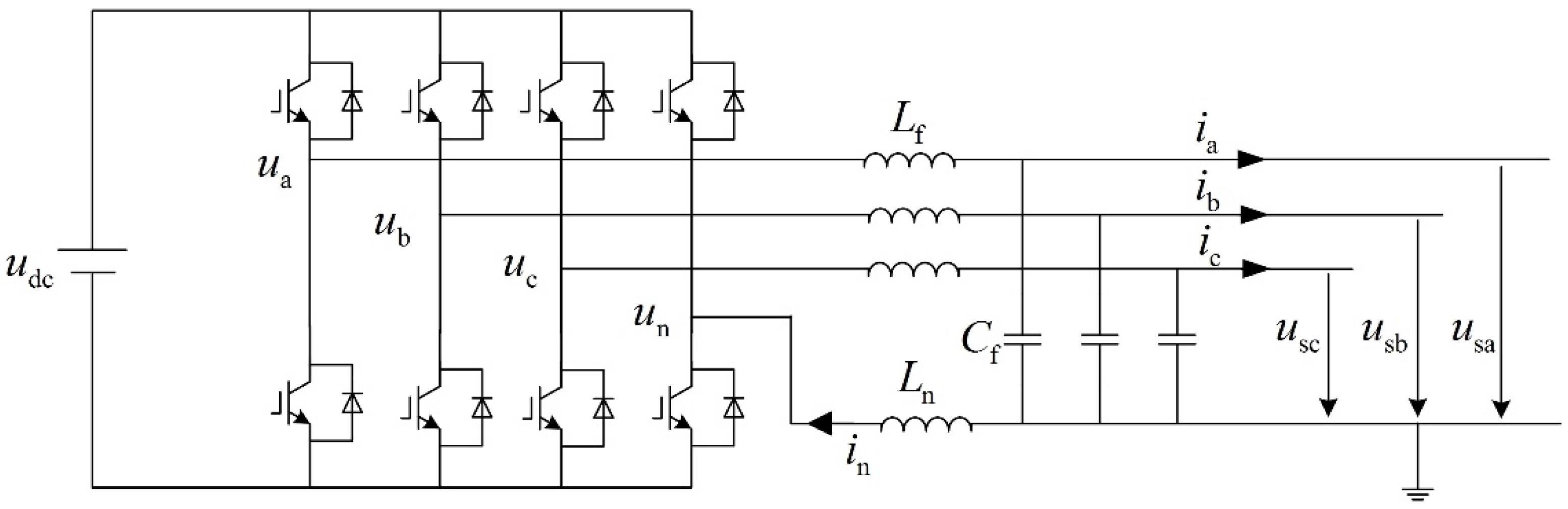
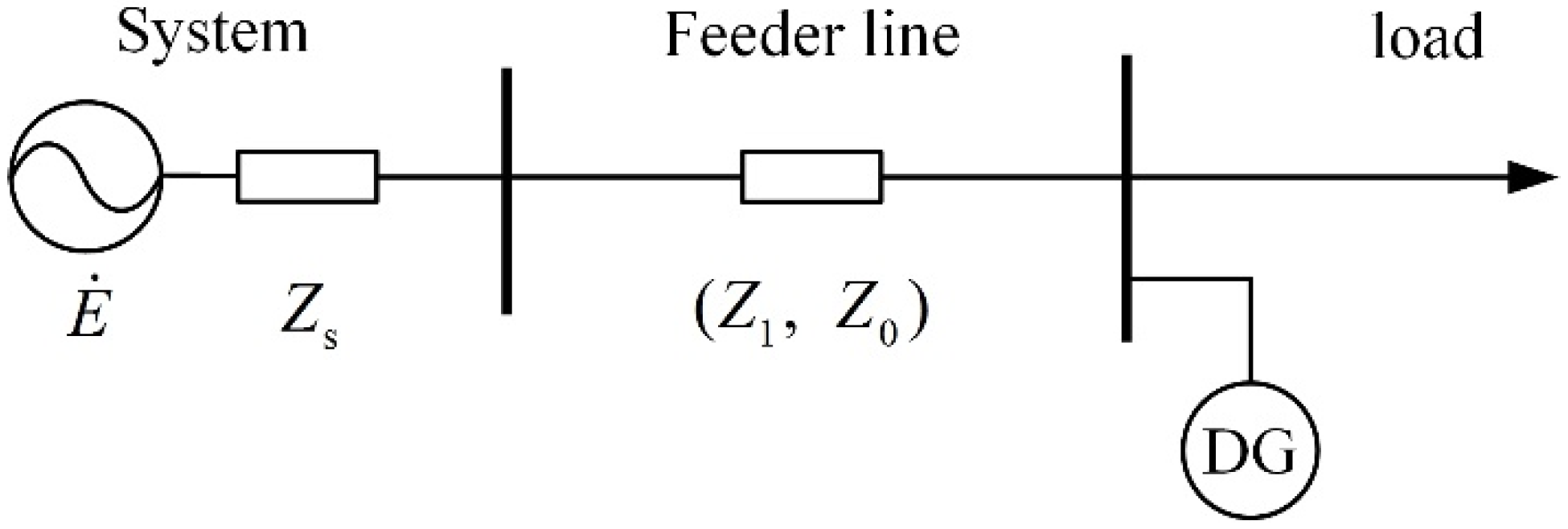
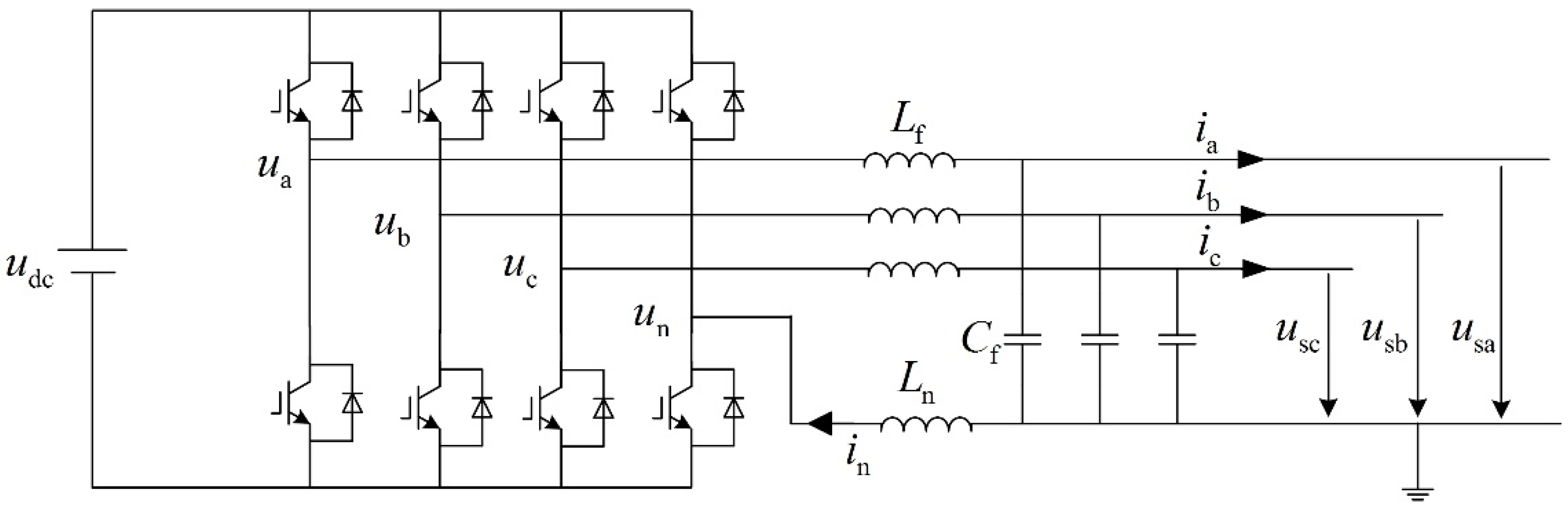
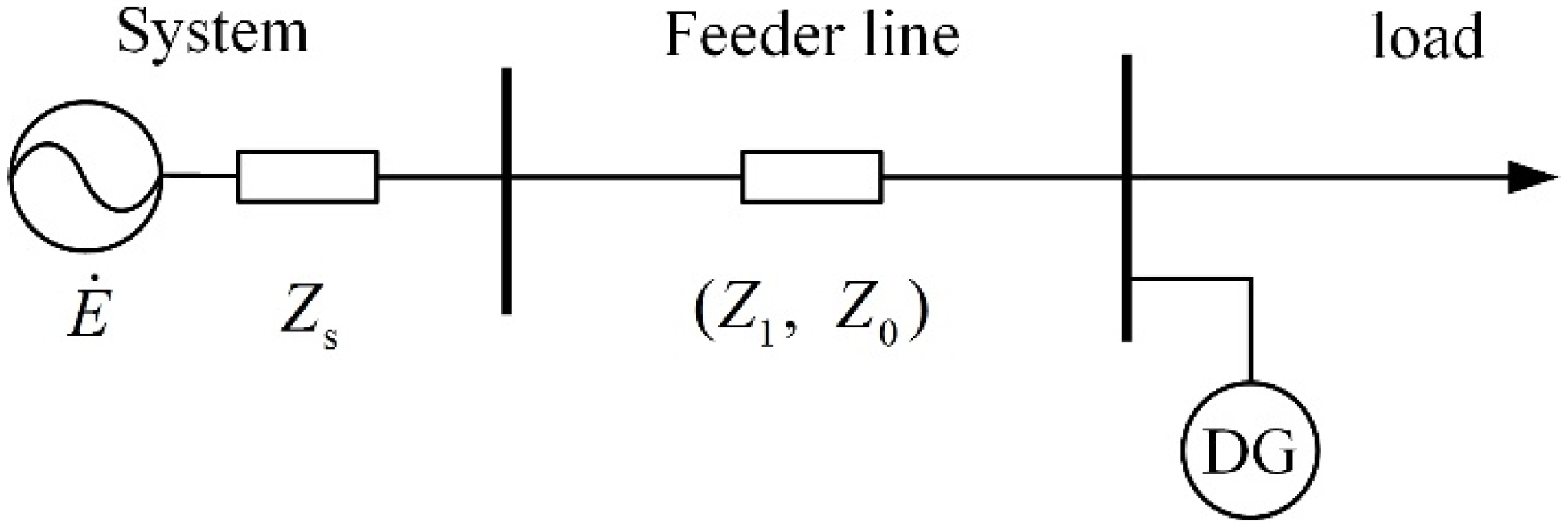
2.1. Modeling and Analysis of the Three-Phase Four-Leg Inverter
2.2. Control Strategy of Positive and Negative Sequence Components
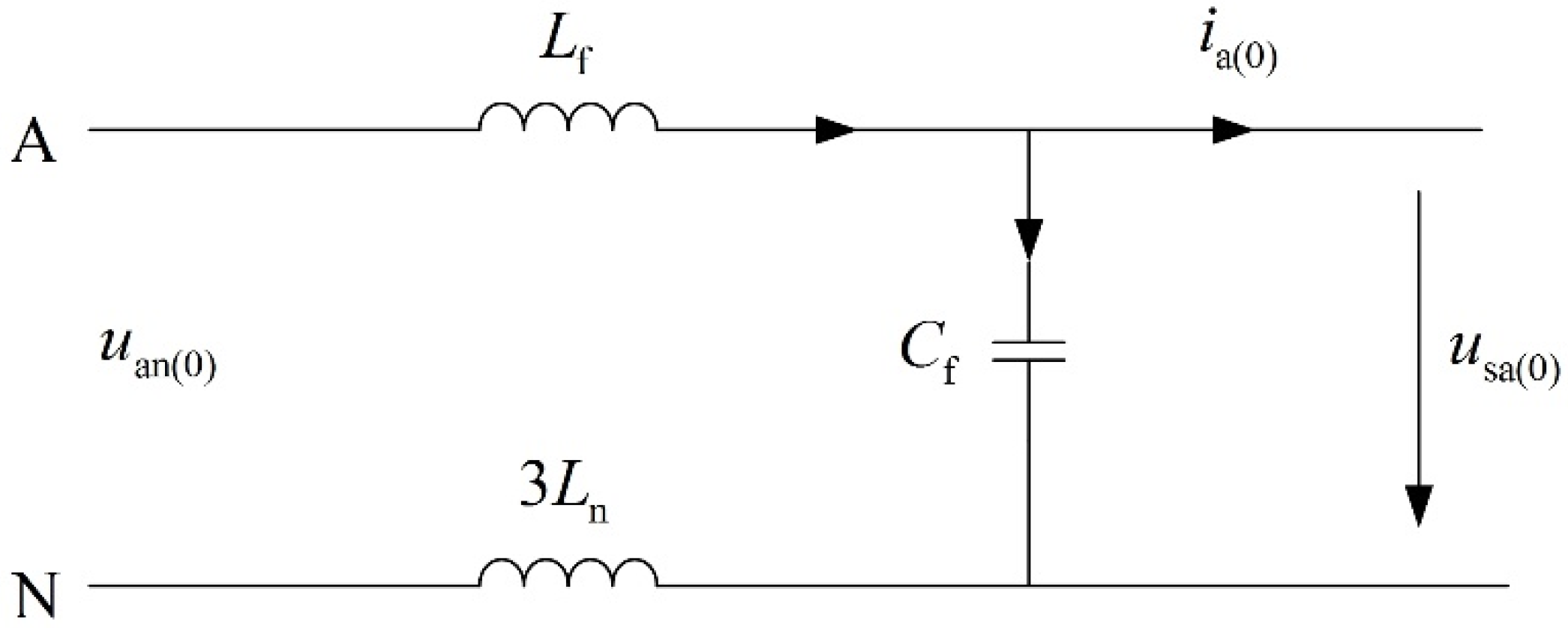
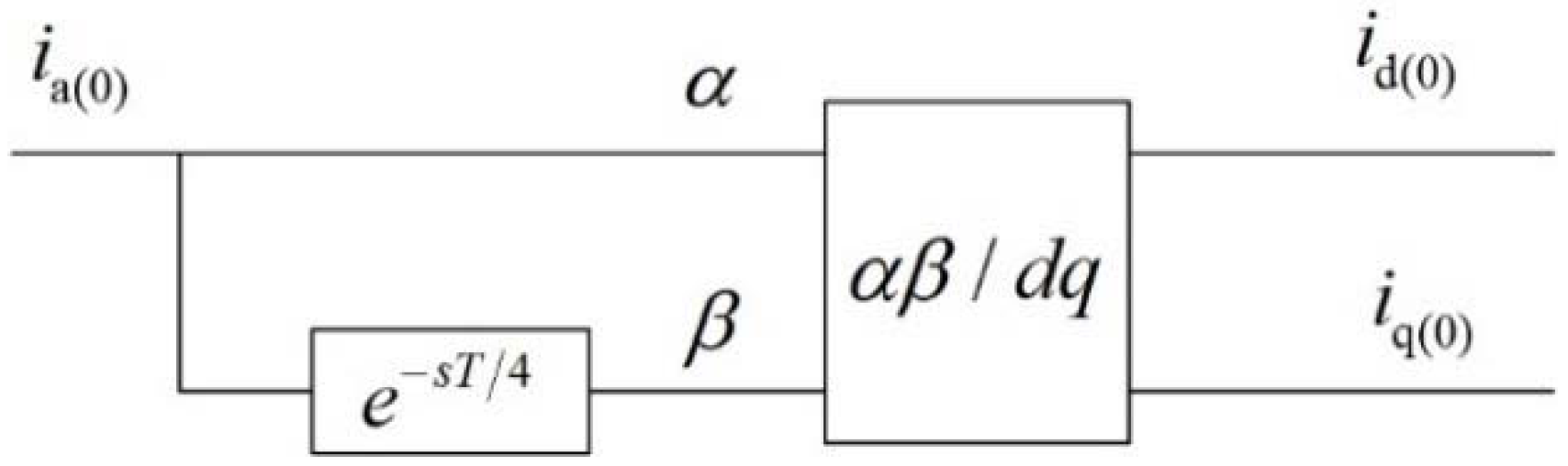
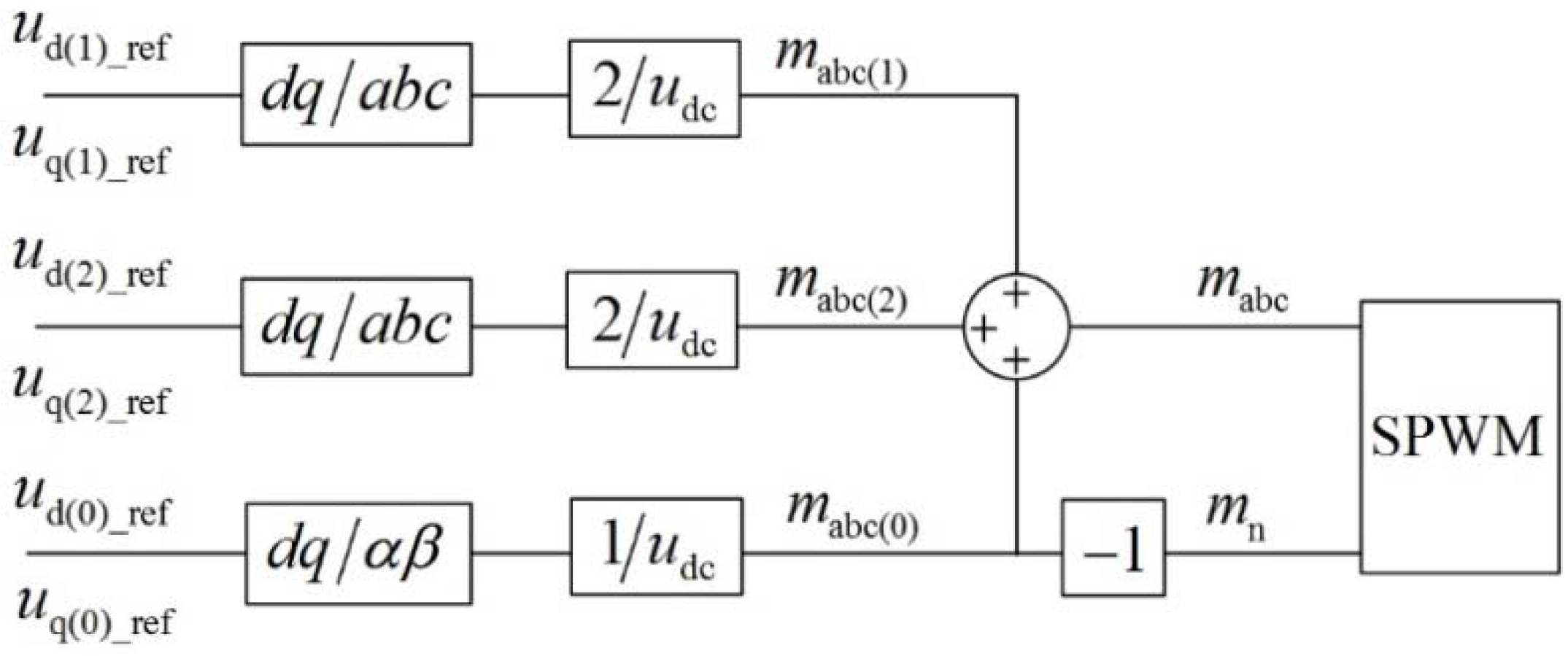
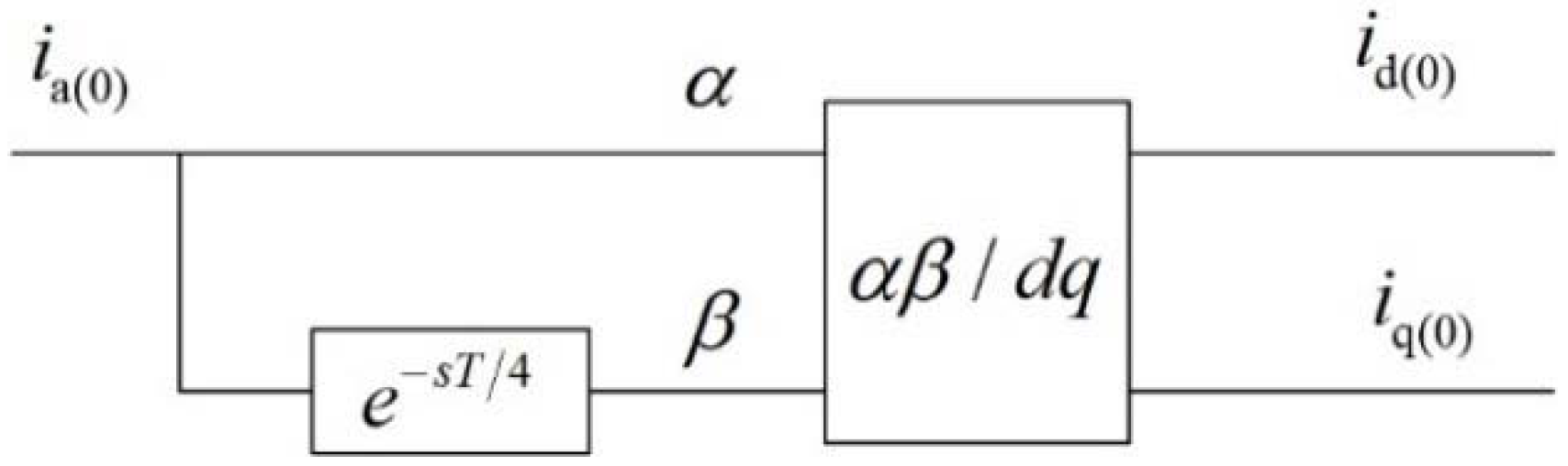
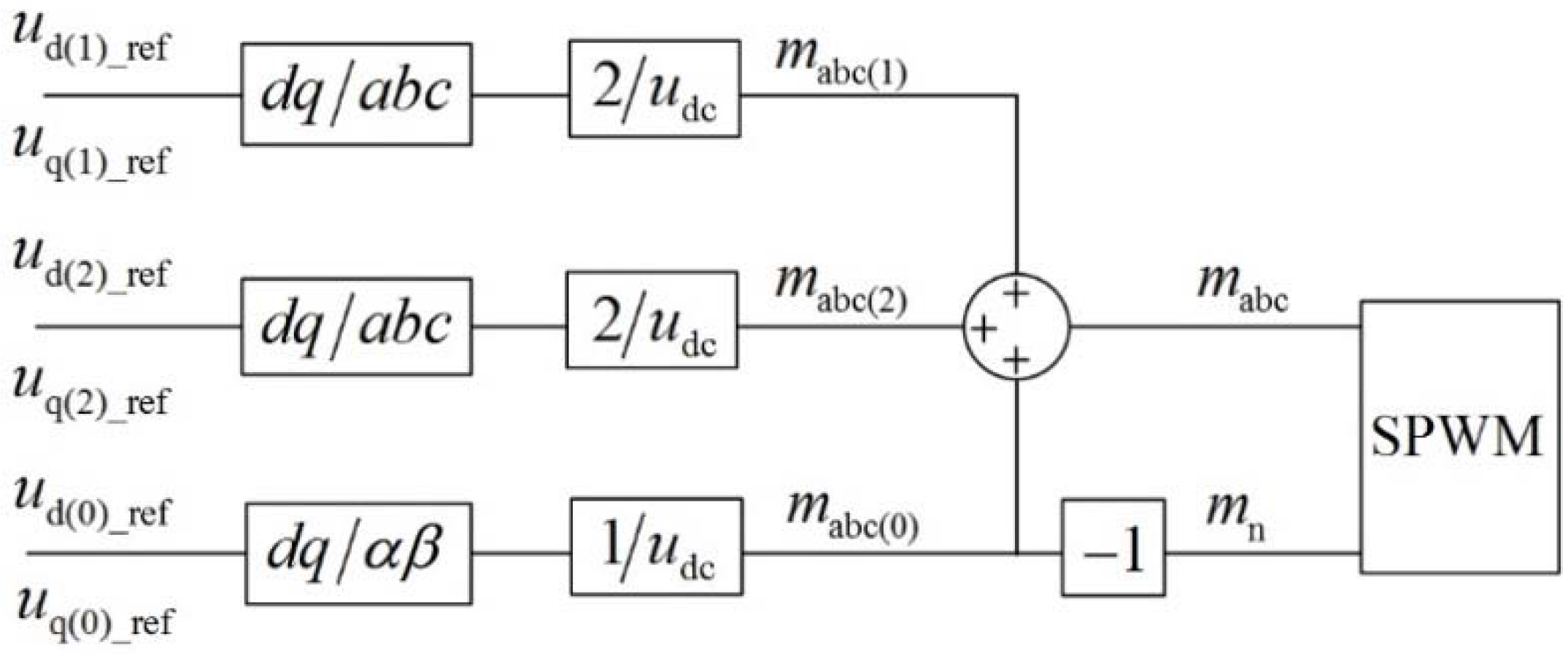
2.3. Control Strategy of Zero Sequence Component
3. Current-Limiting Scheme Embedded in Control Strategy
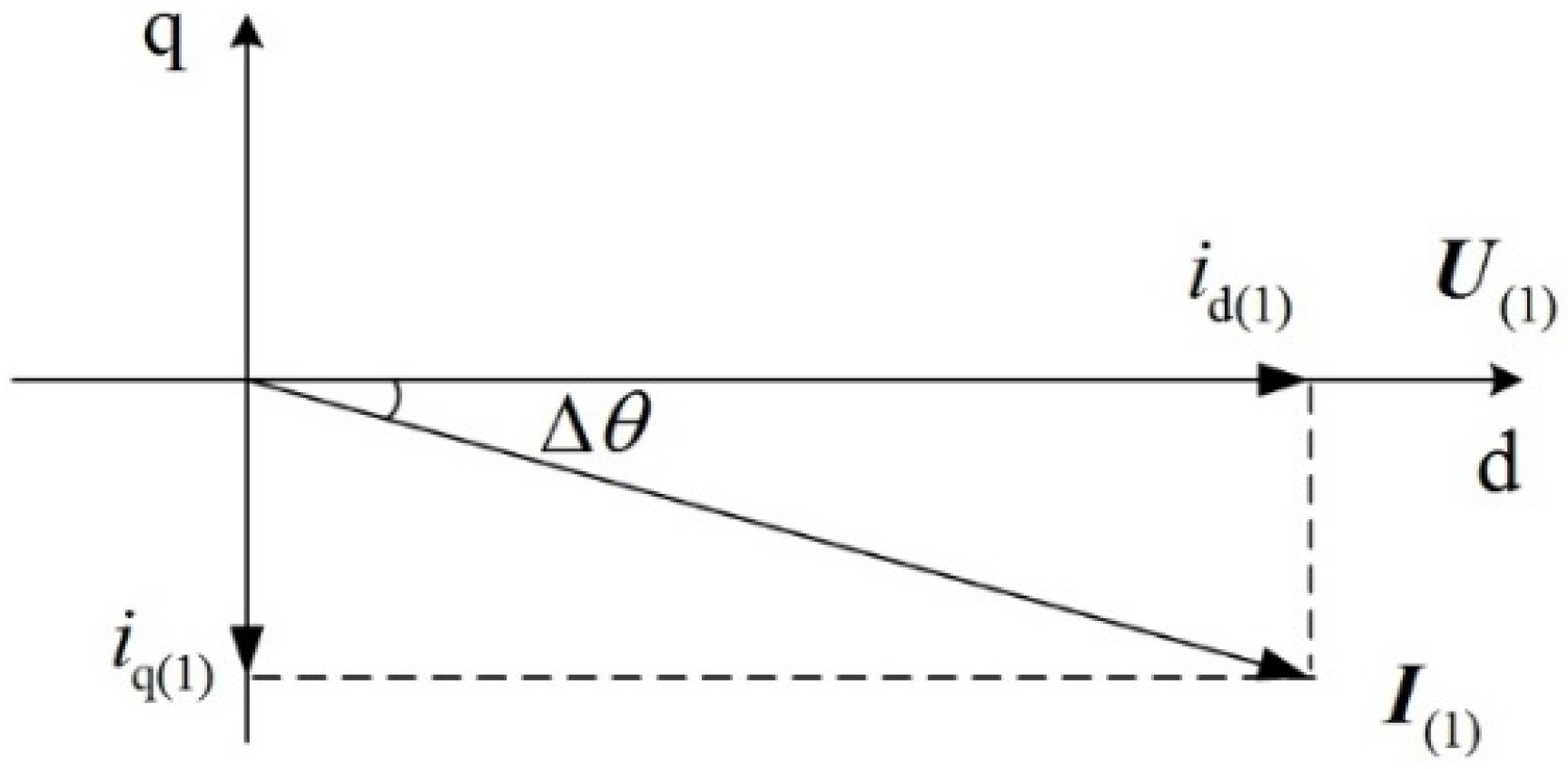
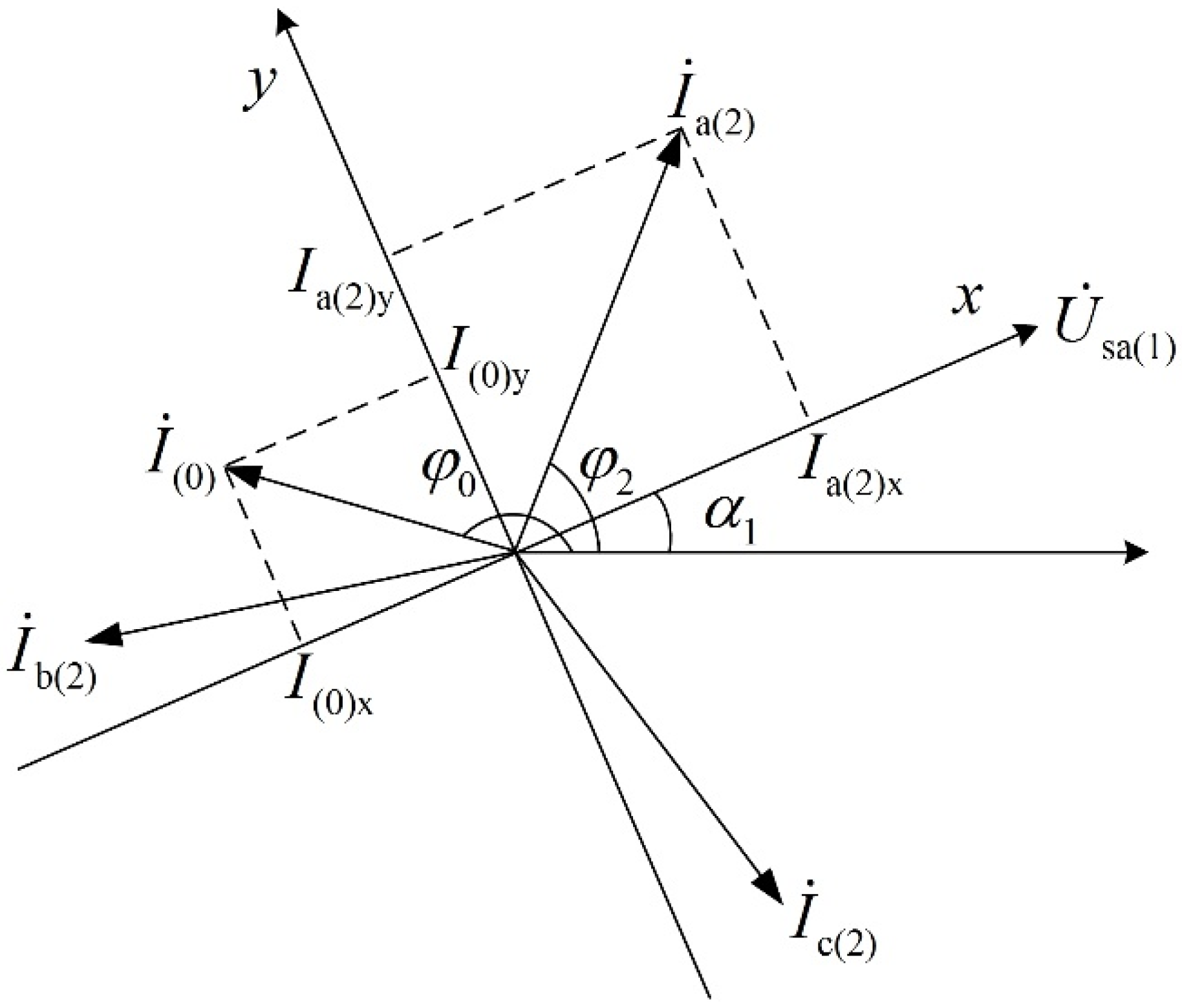
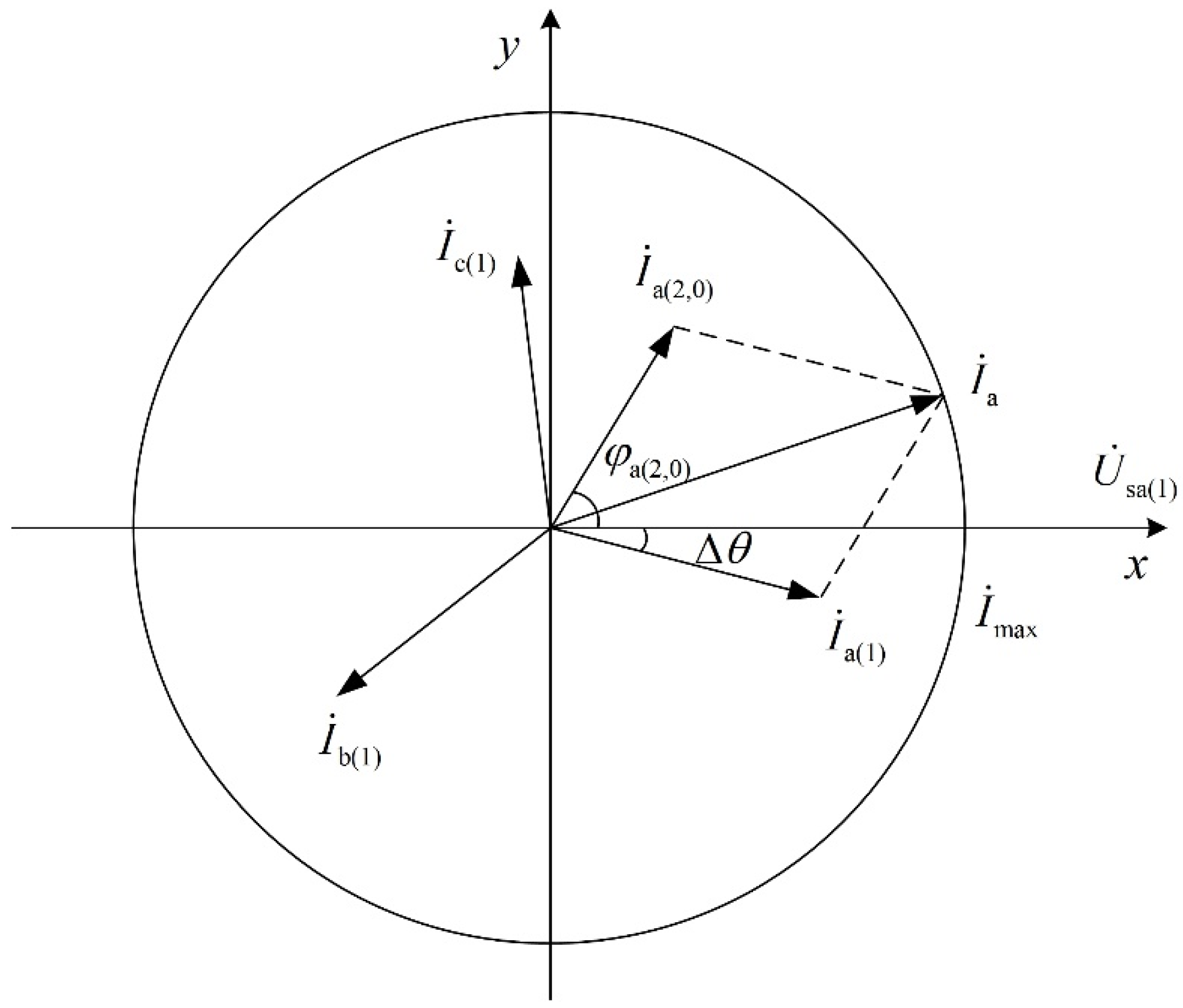
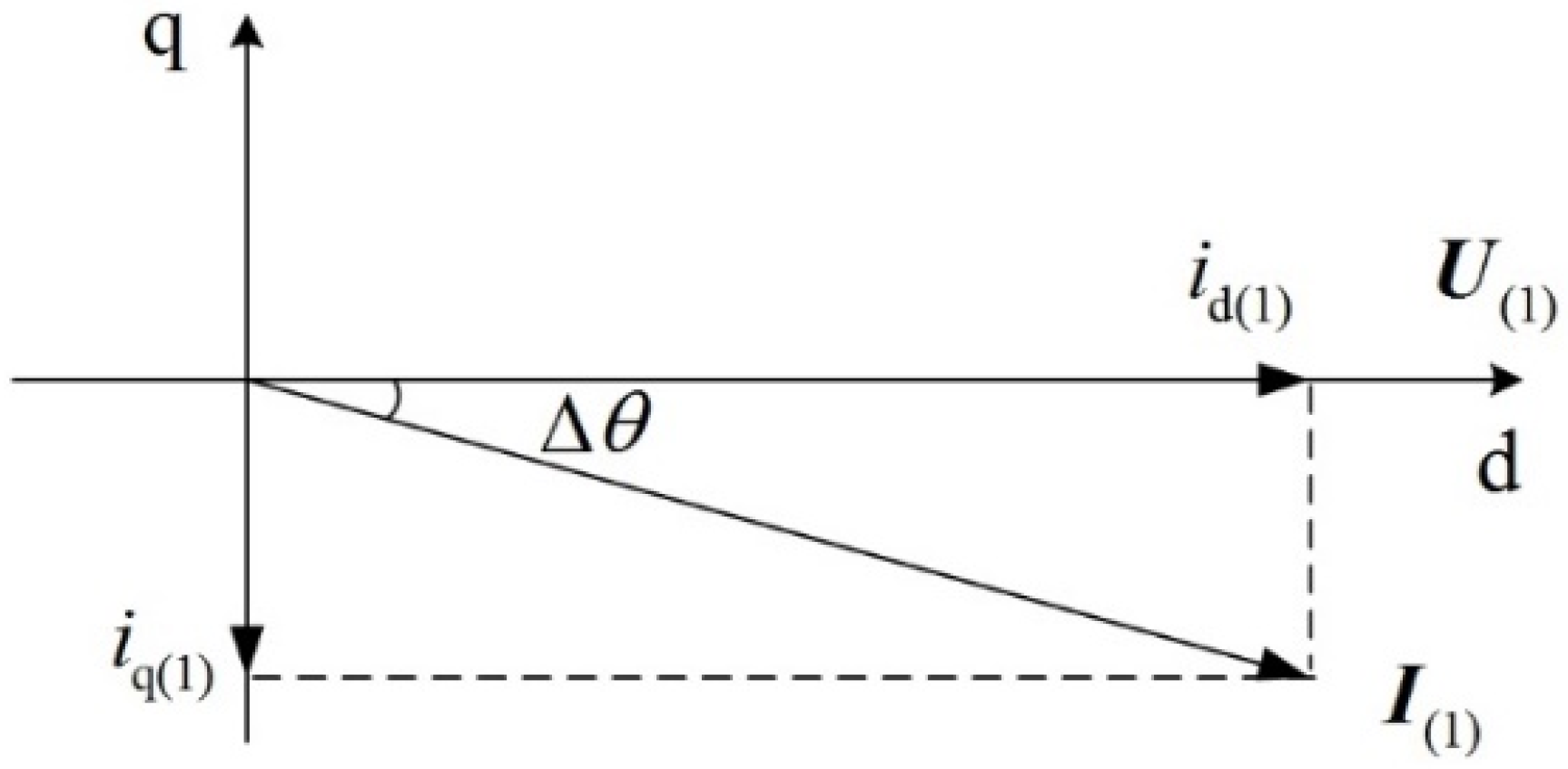
3.1. Output Characteristic of Each Sequence
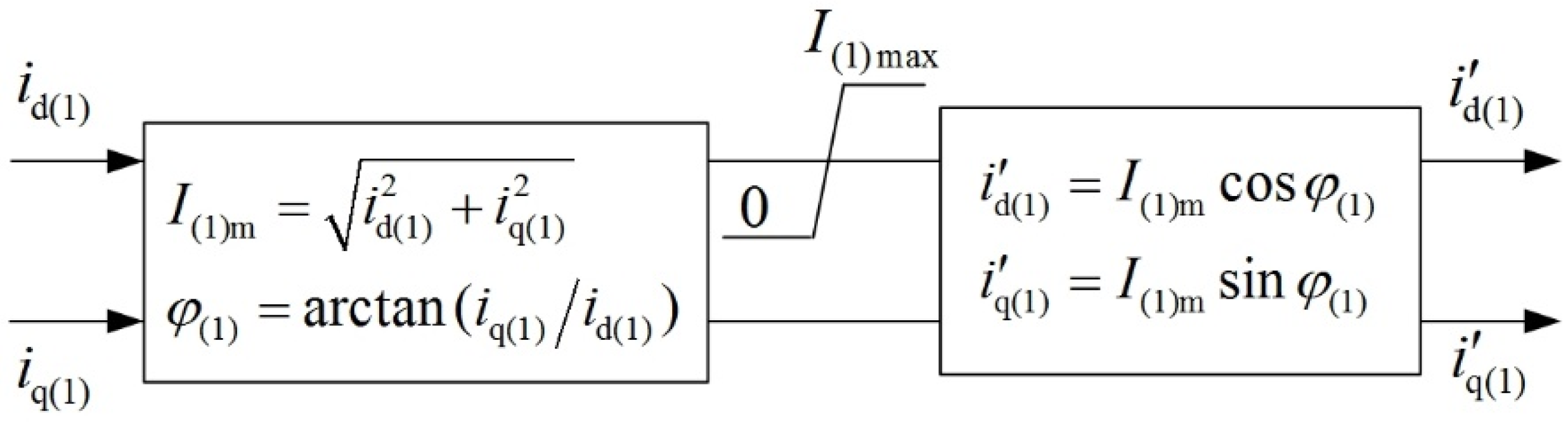
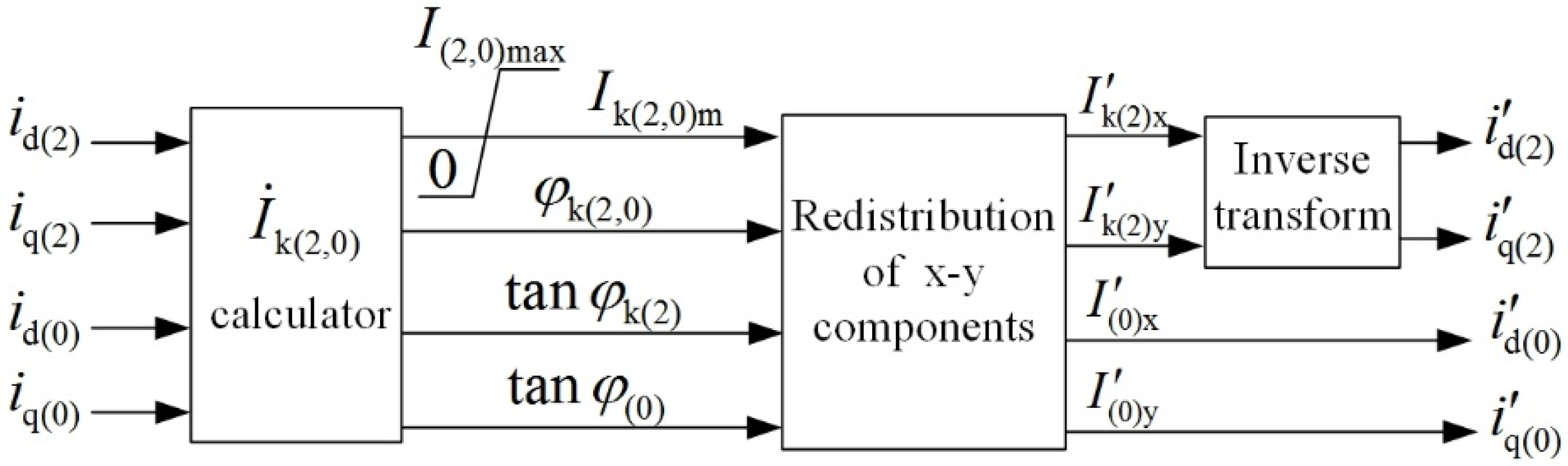
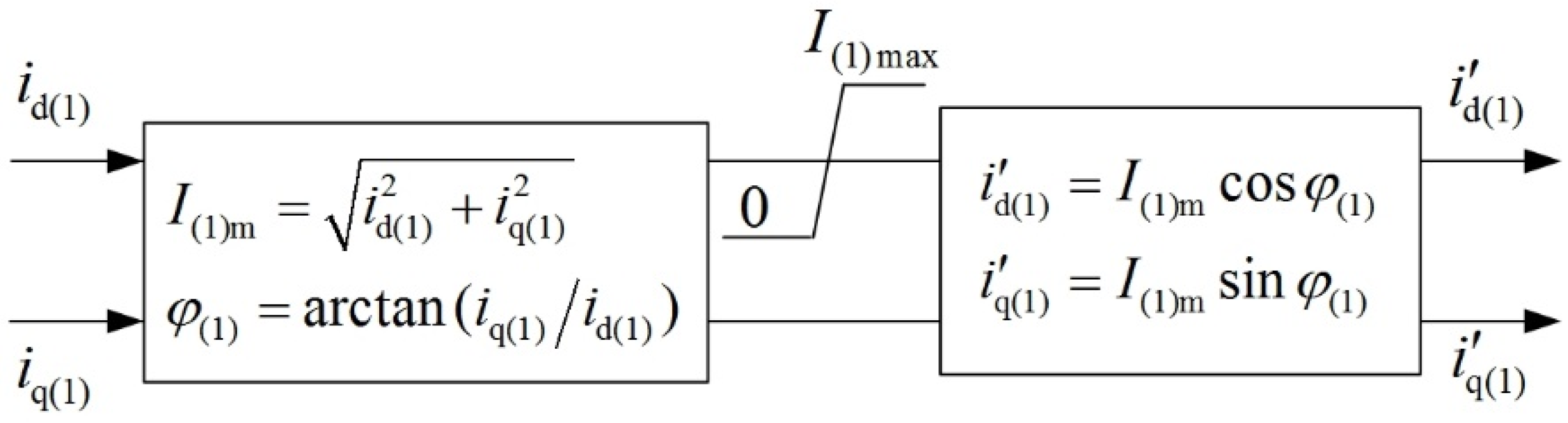
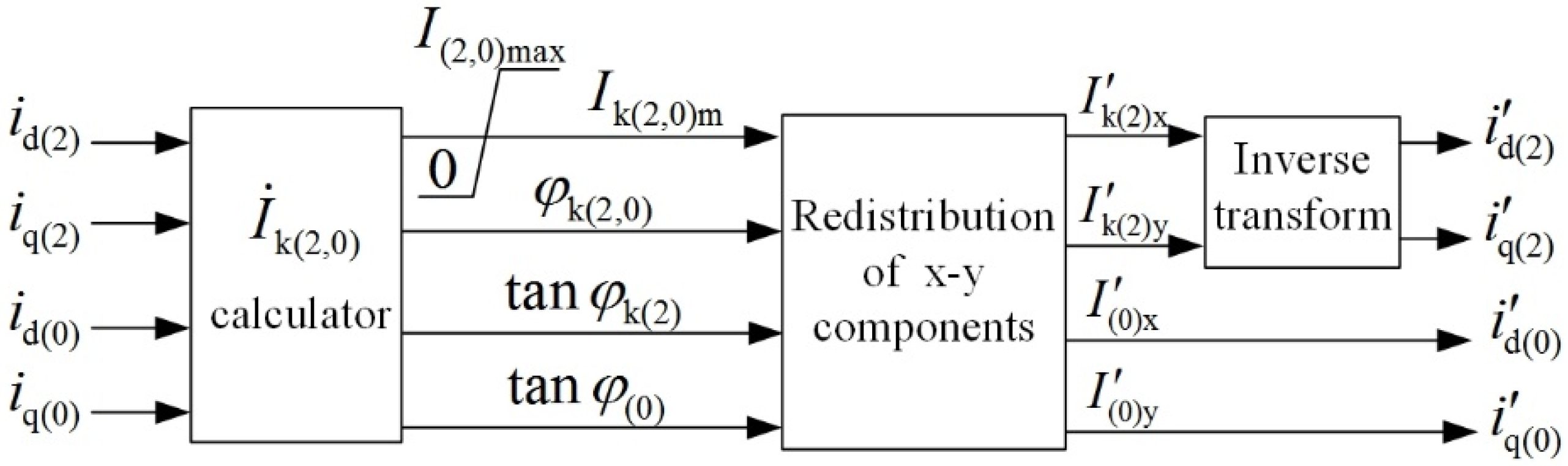
3.2. Current Modulus Limiters of Each Sequence
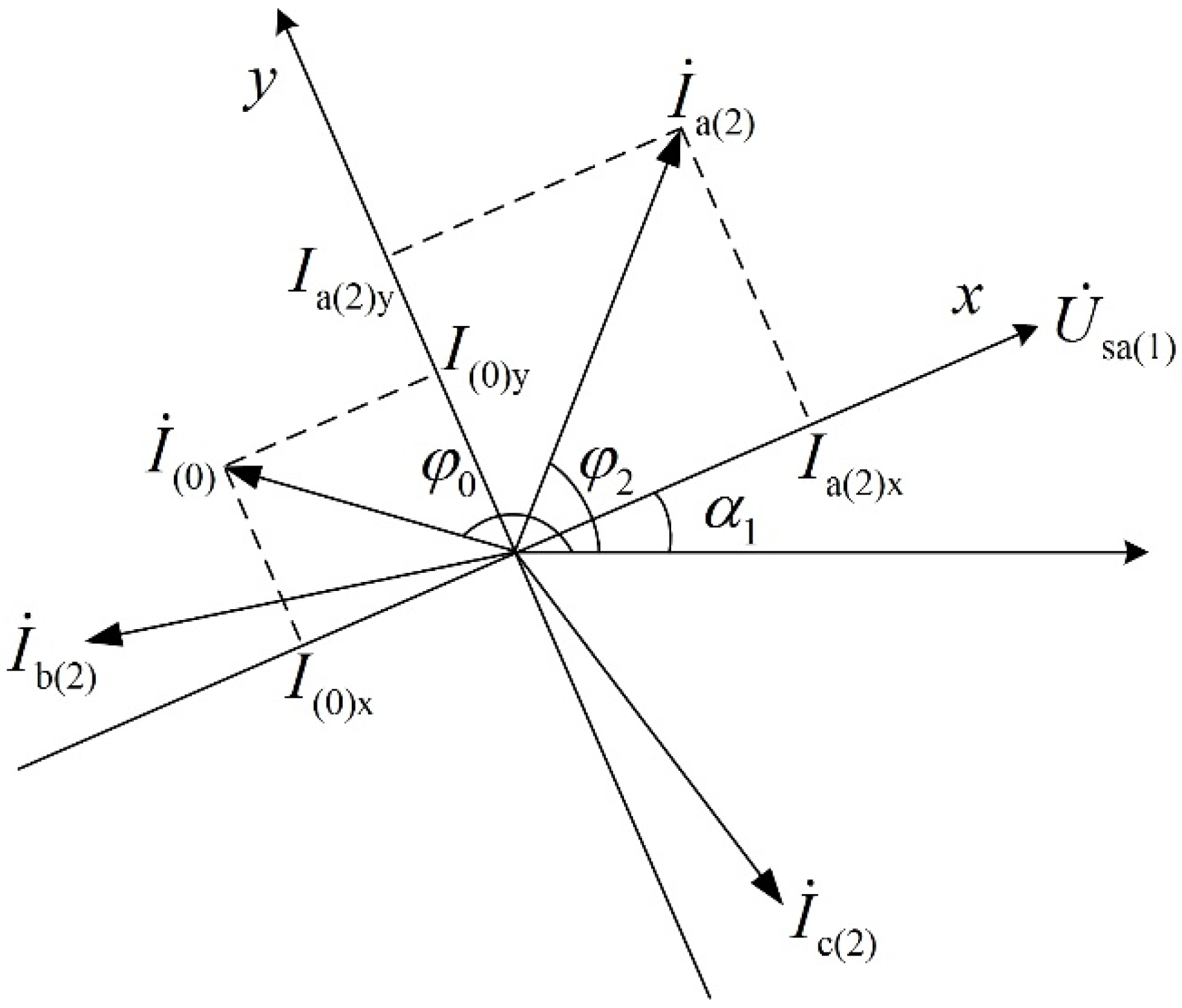
3.3. Combined Current-Limiting Method
4. Simulation and Analysis
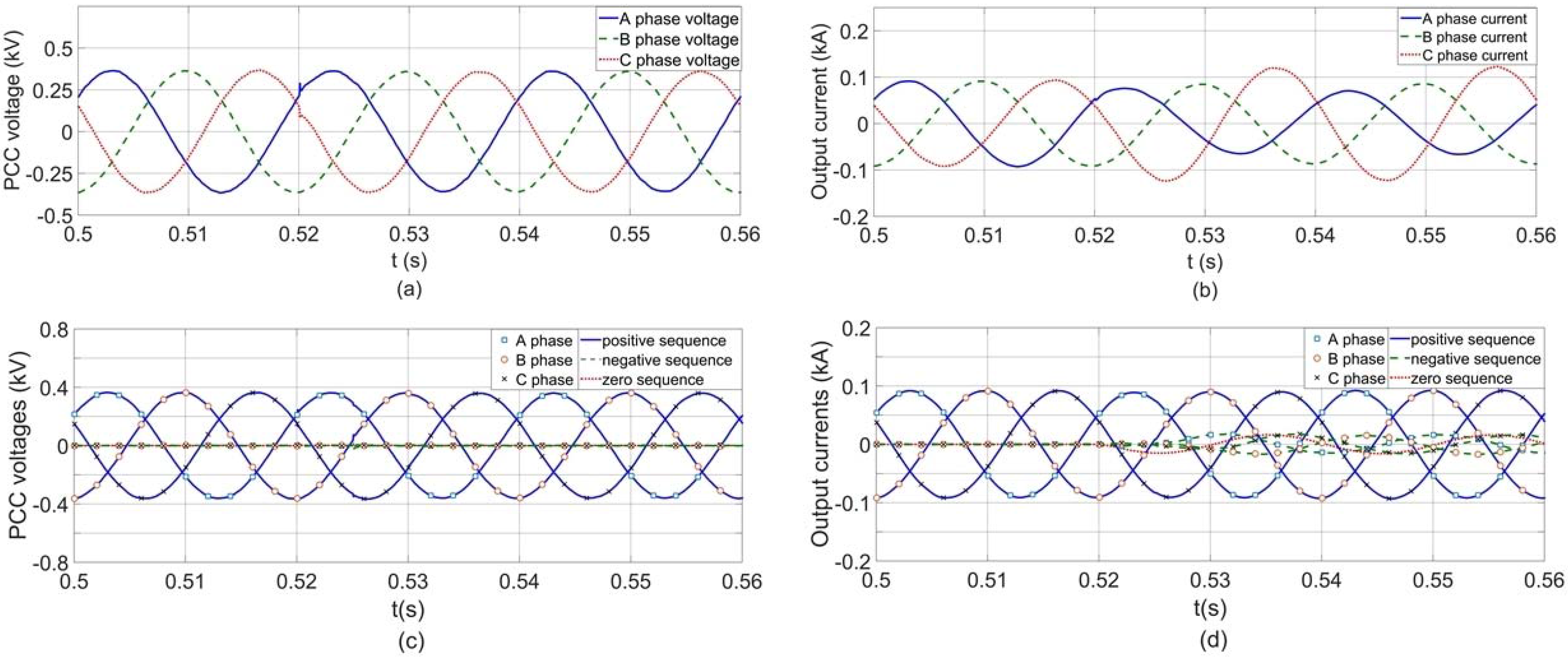
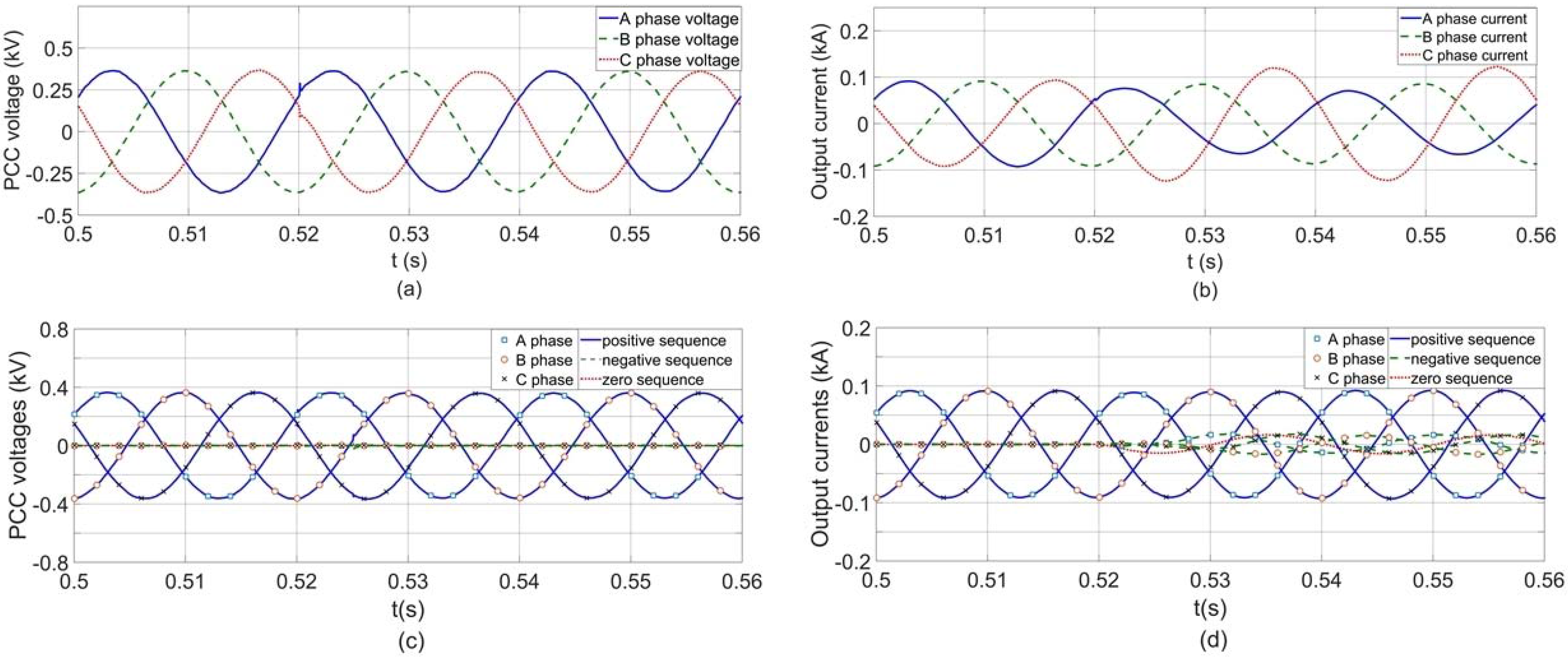
4.1. Verification of the Voltage-Balancing Capability of the Control Strategy
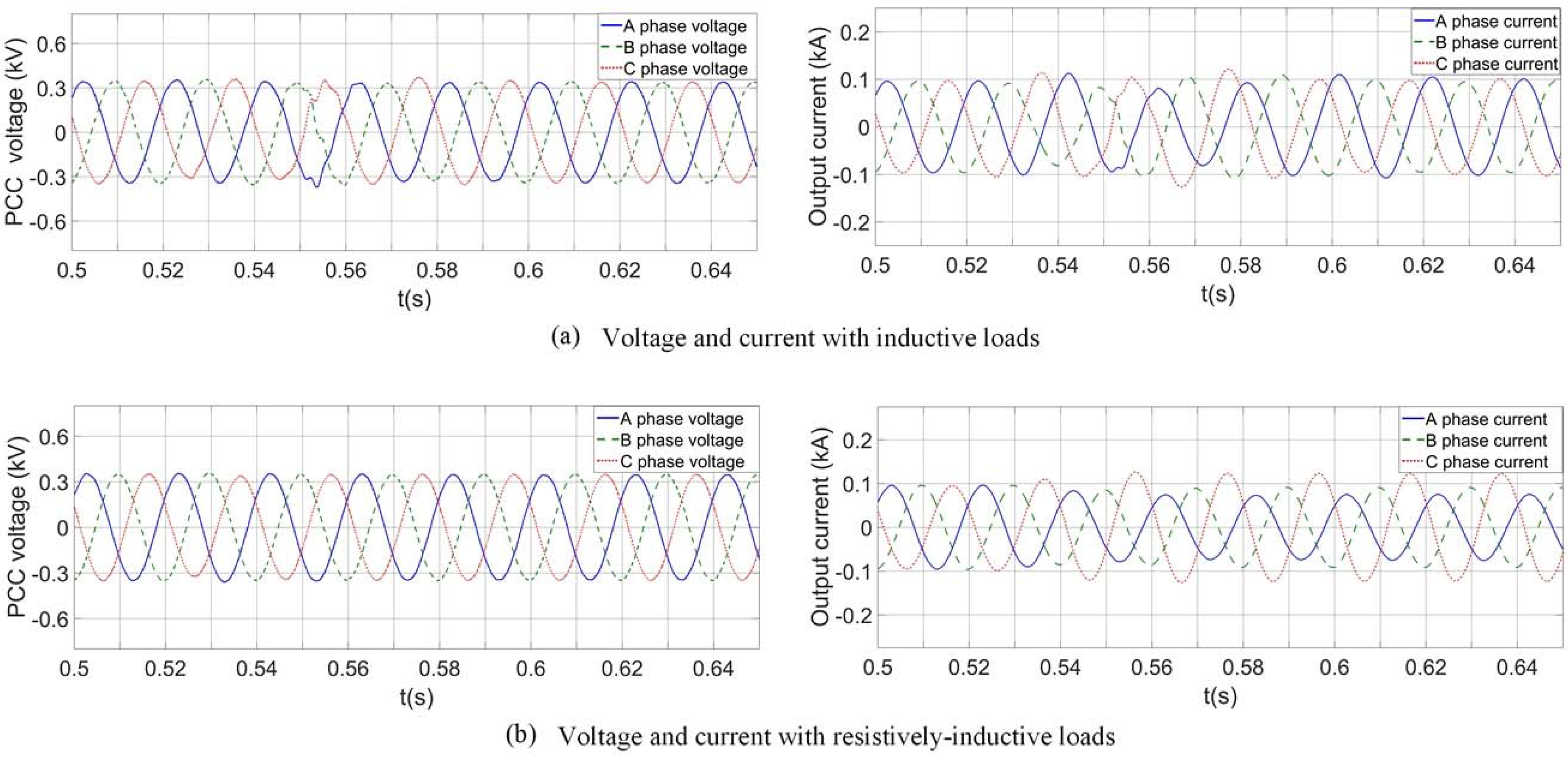
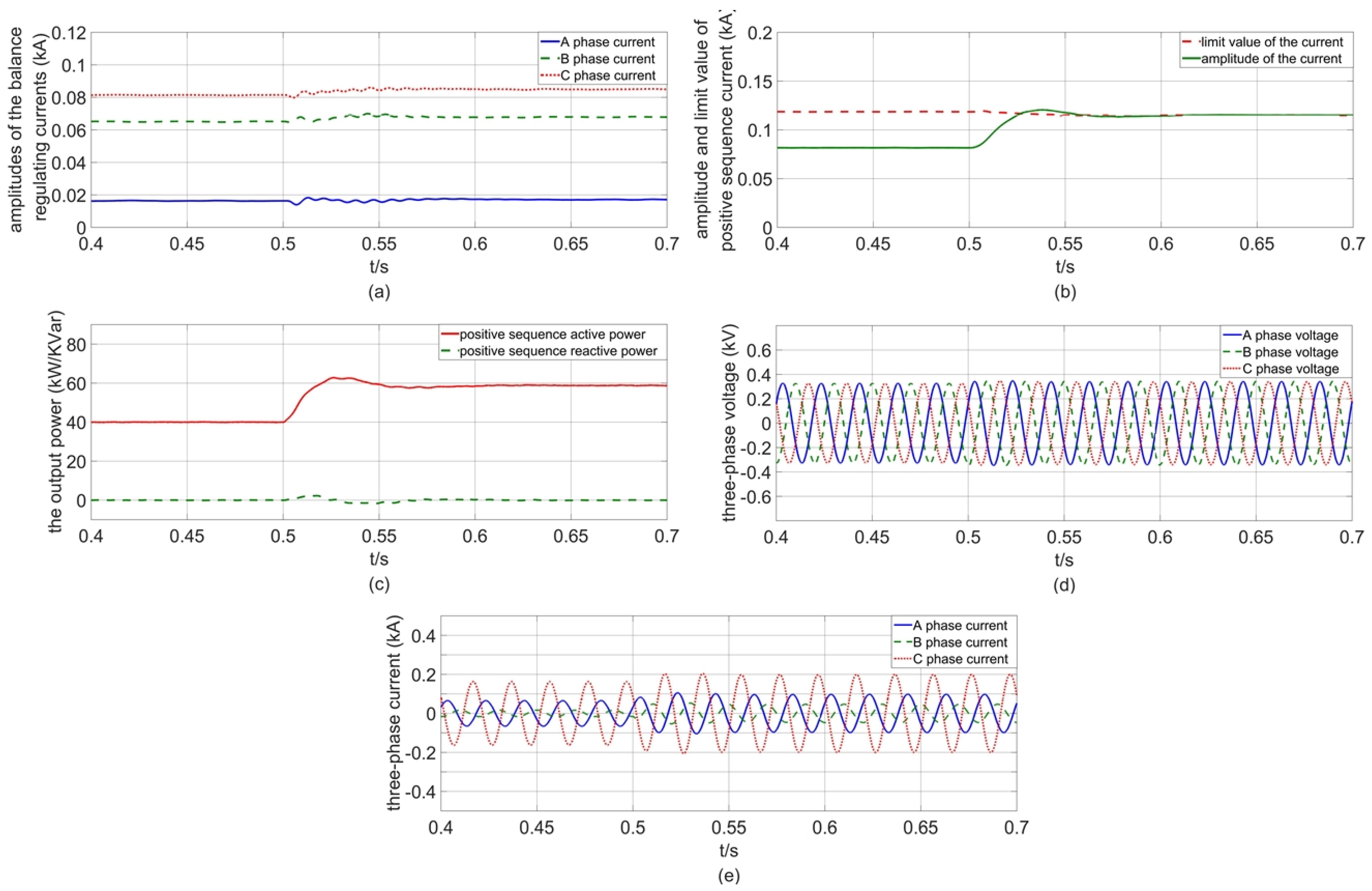
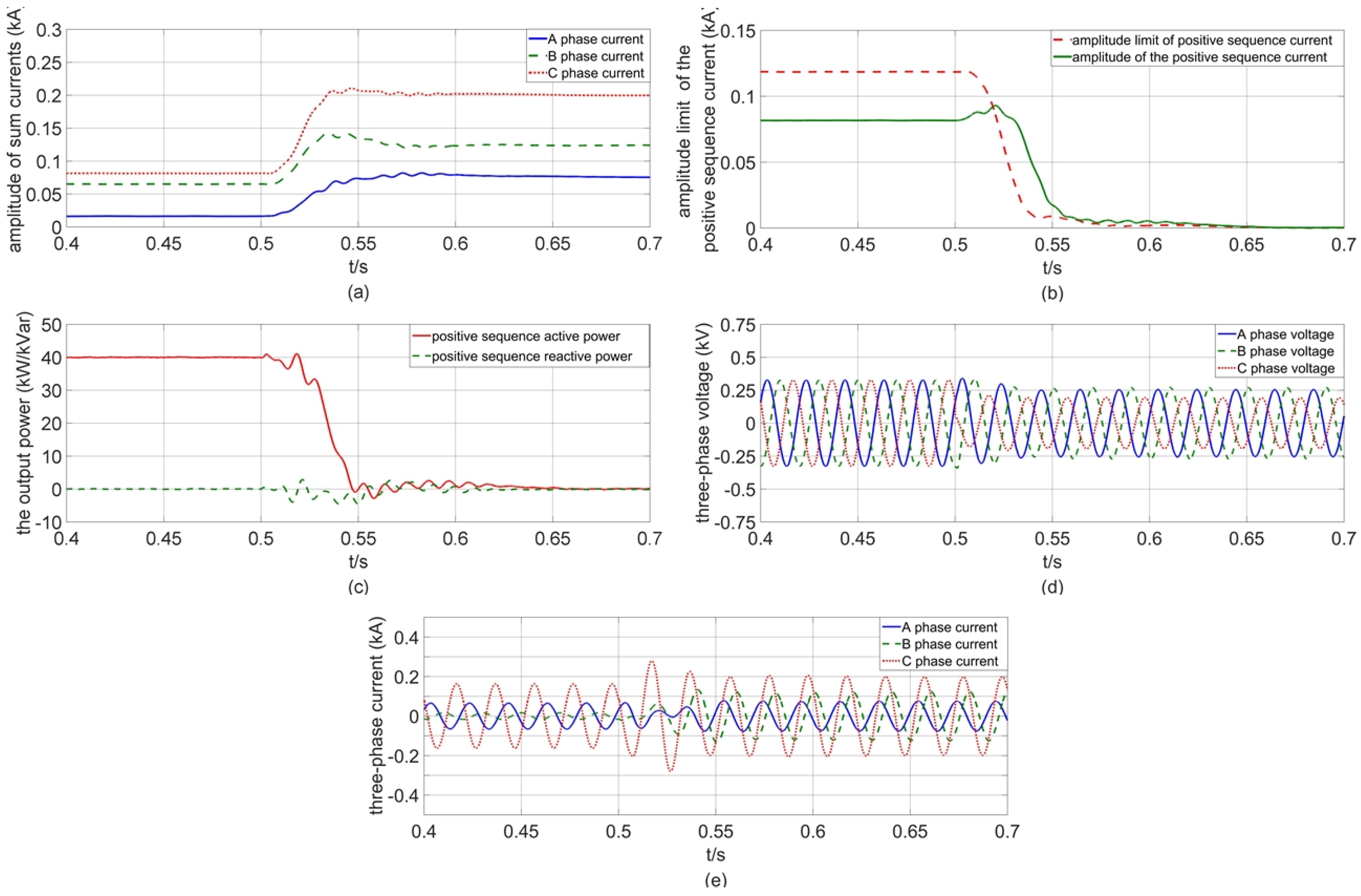
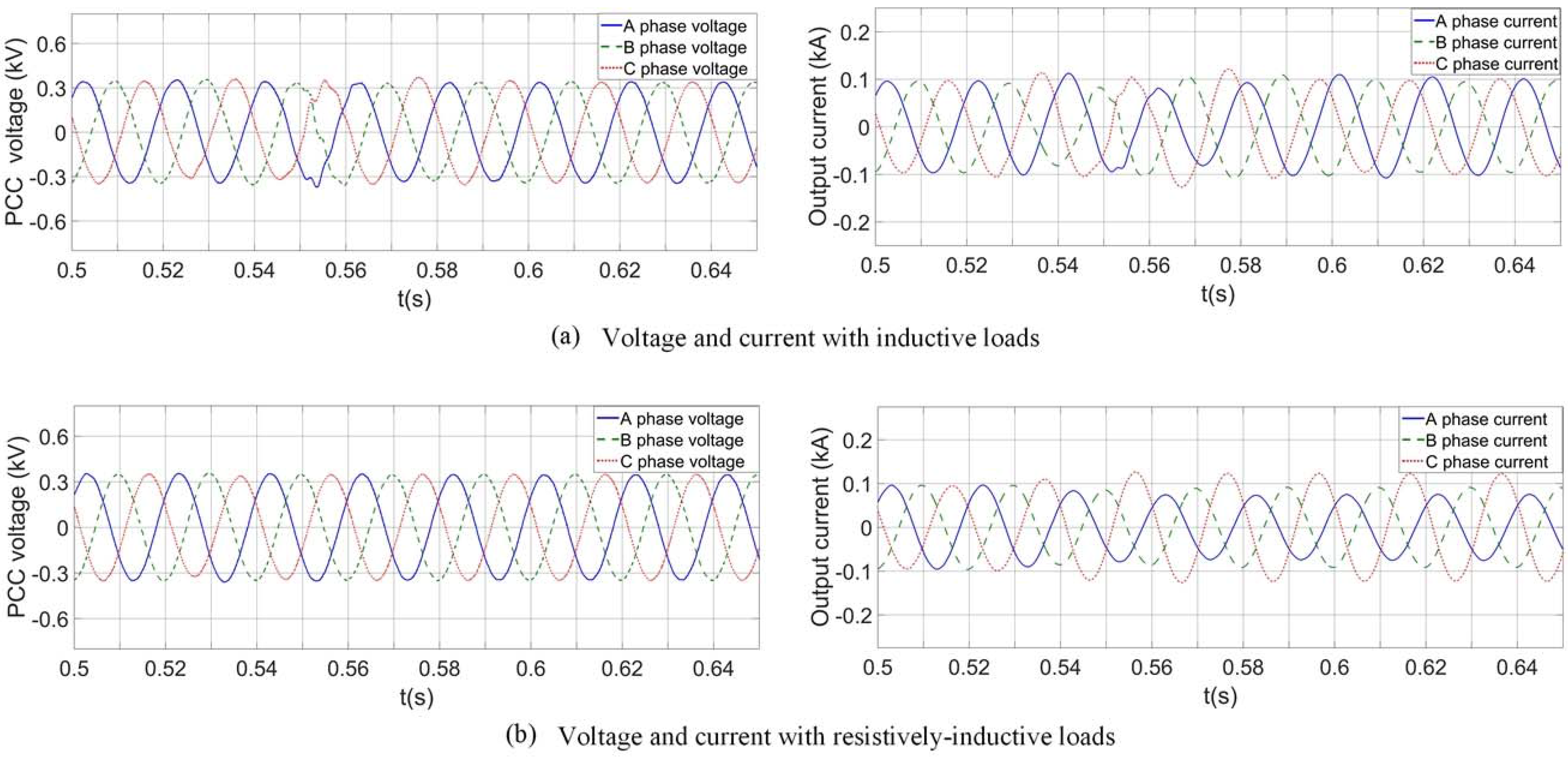
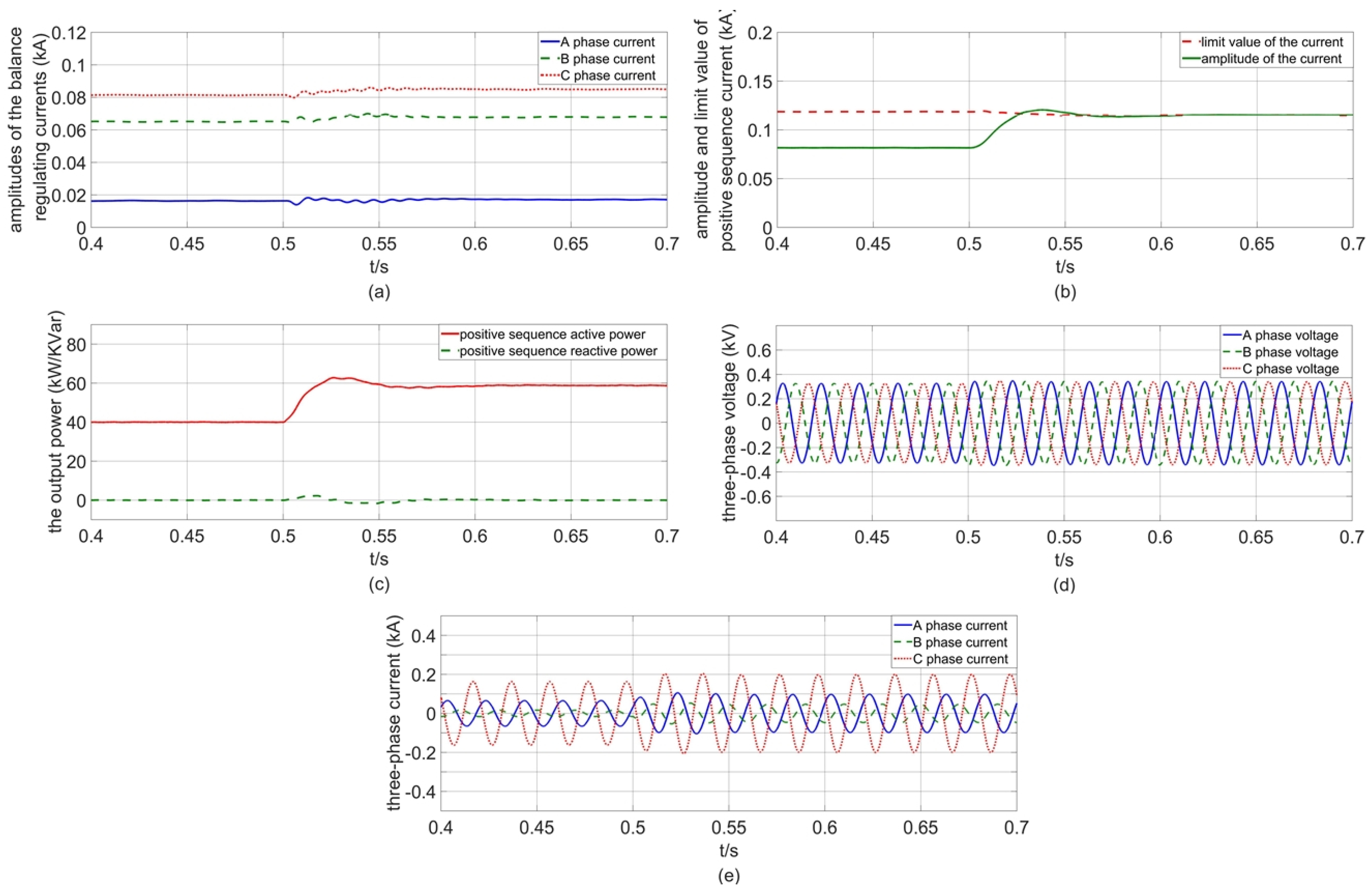
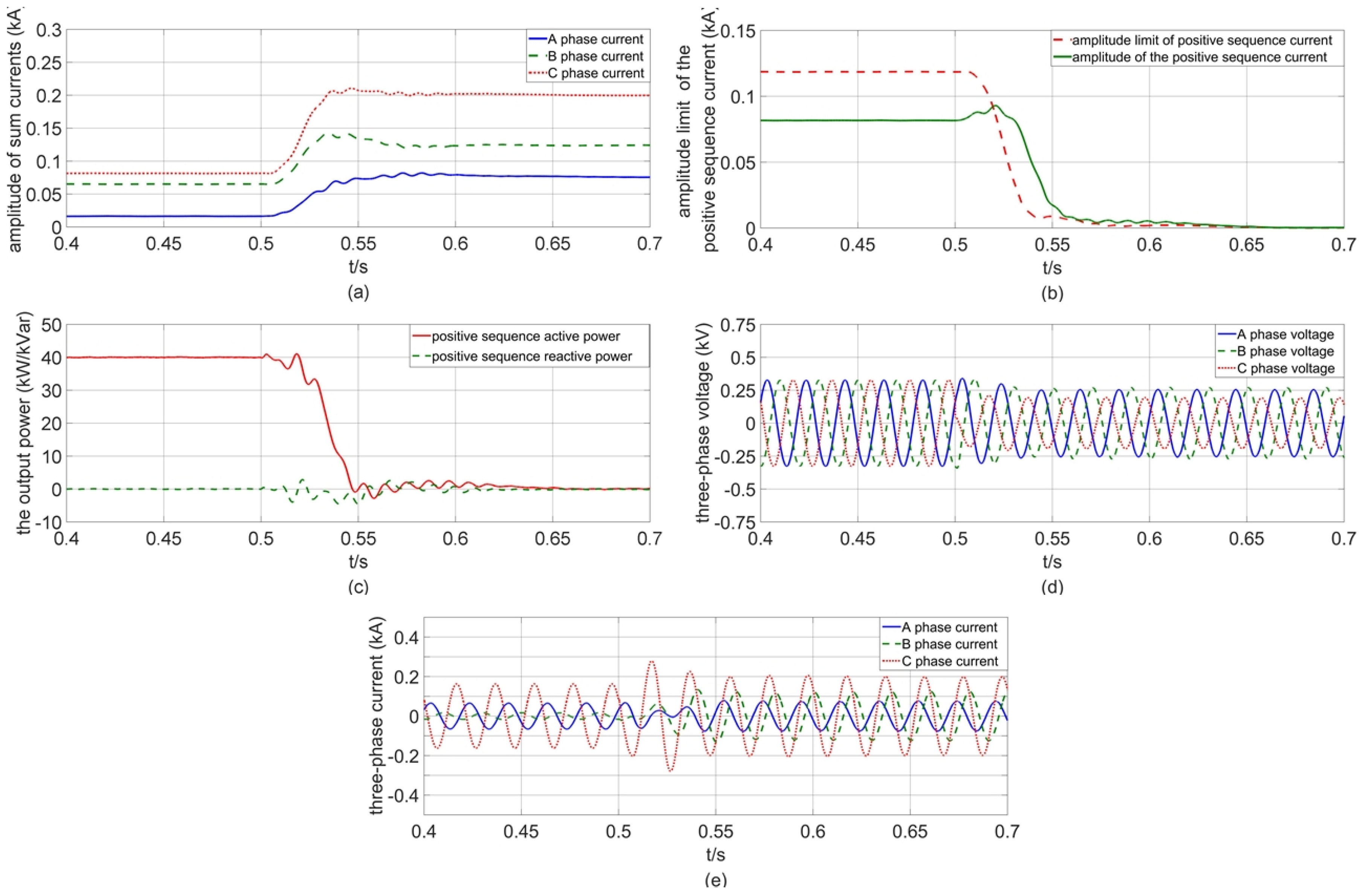
4.2. Verification of the Current-Limiting Scheme
5. Conclusions
- The independent control schemes for the positive, negative, and zero sequence in synchronous rotating frame are realized based on the symmetrical component method. All three sequence components are transformed into DC to make the PI controller applicative.
- Through the coordinate transformation, all the DC components of the three sequence currents in d-q frames are unified into one coordinate system. The current limiter is designed by calculating the current reference of each sequence in this unified coordinate system.
- The current-limiting scheme is adaptive to the output power reference and the loads asymmetry condition. It can set the current limit of each sequence reasonably while giving full play to the output capability of the inverter.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Miveh, M.R.; Rahmat, M.F.; Ghadimi, A.A.; Mustafa, M.W. Control techniques for three-phase four-leg voltage source inverters in autonomous microgrids: A review. Renew. Sustain. Energy Rev. 2016, 54, 1592–1610. [Google Scholar] [CrossRef]
- Li, Y.W.; Vilathgamuwa, D.M.; Loh, P.C. Microgrid power quality enhancement using a three-phase four-wire grid-interfacing compensator. IEEE Trans. Ind. Appl. 2005, 41, 1707–1719. [Google Scholar] [CrossRef]
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Canizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in microgrid control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Rivera, M.; Yaramasu, V.; Llor, A.; Rodriguez, J.; Wu, B.; Fadel, M. Digital predictive current control of a three-phase four-leg inverter. IEEE Trans. Ind. Electron. 2013, 60, 4903–4912. [Google Scholar] [CrossRef]
- Sun, C.; Ma, W.M.; Lu, J.Y. Analysis of the unsymmetrical output voltages distortion mechanism of three-phase inverter and its corrections. Proc. CSEE 2006, 26, 57–64. [Google Scholar]
- Dou, X.B.; Quan, X.J.; Hu, Q.R.; Wu, Z.J.; Zhao, B.; Li, P.; Zhang, S.Z.; Jiao, Y. An optimal PR control strategy with load current observer for a three-phase voltage source inverter. Energies 2015, 8, 7542–7562. [Google Scholar] [CrossRef]
- Lai, N.B.; Kim, K.H. An improved current control strategy for a grid-connected inverter under distorted grid conditions. Energies 2016, 9, 190. [Google Scholar] [CrossRef]
- Savaghebi, M.; Jalilian, A.; Vasquez, J.C.; Guerrero, J.M. Autonomous voltage unbalance compensation in an islanded droop-controlled microgrid. IEEE Trans. Ind. Electron. 2013, 60, 1390–1402. [Google Scholar] [CrossRef]
- Guo, X.H.; Chang, C.W.; Chang-Chien, L.R. An automatic voltage compensation technique for three-phase stand-alone inverter to serve unbalanced or nonlinear load. In Proceedings of the 2015 IEEE international future energy electronics conference (IFEEC), Taipei, Taiwan, 1–4 November 2015.
- Bozalakov, D.V.; Vandoorn, T.L.; Meersman, B.; Papagiannis, G.K.; Chrysochos, A.I.; Vandevelde, L. Damping-based droop control strategy allowing an increased penetration of renewable energy resources in low-voltage grids. IEEE Trans. Power Deliv. 2016, 31, 1447–1455. [Google Scholar] [CrossRef]
- Stala, R. A natural DC-link voltage balancing of diode-clamped inverters in parallel systems. IEEE Trans. Ind. Electron. 2013, 60, 5008–5018. [Google Scholar] [CrossRef]
- Tian, K.; Wu, B.; Narimani, M.; Xu, D.; Cheng, Z.Y.; Zargari, N.R. A capacitor voltage-balancing method for nested neutral point clamped (NNPC) inverter. IEEE Trans. Power Electron. 2016, 31, 2575–2583. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, J.J.; Li, J. Modeling, analysis, and mitigation of load neutral point voltage for three-phase four-leg inverter. IEEE Trans. Ind. Electron. 2013, 60, 2010–2021. [Google Scholar] [CrossRef]
- Gu, H.R.; Wang, D.Y.; Shen, H.; Zhao, W.; Guo, X.Q. Research on control scheme of three-phase four-leg inverter. Power Syst. Prot. Control 2011, 39, 41–46. [Google Scholar]
- Bayhan, S.; Trabelsi, M.; Abu-Rub, H. Model predictive control of Z-source four-leg inverter for standalone photovoltaic system with unbalanced load. In Proceedings of the 2016 IEEE applied power electronics conference and exposition (APEC), Long Beach, CA, USA, 20–24 March 2016.
- Guo, Z.Q.; Panda, S.K.; Prasanna, I.V. Design of new control strategies for a four-leg three-phase inverter to eliminate the neutral current under unbalanced loads. In Proceedings of 2014 international power electronics conference (IPEC-Hiroshima 2014-ECCE ASIA), Hiroshima, Japan, 18–21 May 2014.
- Su, M.; Wang, H.; Sun, Y.; Tan, J.M.; Yu, J.R.; Gui, W.H. Design of three-phase four-leg inverter based on modified repetitive controller. Proc. CSEE 2010, 30, 29–35. [Google Scholar]
- Chen, H.B.; Min, J.Y. Simulation research on the control strategy of three-phase four-leg inverter. In Proceedings of the 2010 international conference on computer application and system modeling (ICCASM 2010), Taiyuan, China, 22–24 October 2010.
- Vechiu, I.; Curea, O.; Camblong, H. Transient operation of a four-leg inverter for autonomous applications with unbalanced load. IEEE Trans. Power Electron. 2010, 25, 399–407. [Google Scholar] [CrossRef]
- Golwala, H.; Chudamani, R. New Three-dimensional space vector-based switching signal generation technique without null vectors and with reduced switching losses for a grid-connected four-leg inverter. IEEE Trans. Power Electron. 2016, 31, 1026–1035. [Google Scholar] [CrossRef]
- Ozdemir, A.; Erdem, Z. Optimal digital control of a three-phase four-leg voltage source inverter. Turk. J. Electr. Eng. Co. 2016, 24, 2220–2238. [Google Scholar] [CrossRef]
- Zhang, R.; Prasad, V.H.; Boroyevich, D. Three-dimensional space vector modulation for four-leg voltage-source converters. IEEE Trans. Power Electron. 2002, 17, 314–326. [Google Scholar] [CrossRef]
- Akagi, H.; Watanabe, E.H.; Aredes, M. Instantaneous Power Theory and Applications to Power Conditioning, 1st ed.; Xu, Z., Ed.; China machine press: Beijing, China, 2009; pp. 60–63. (In Chinese) [Google Scholar]
- Zhang, X.; Zhang, C.W. PWM Rectifier and its Control, 1st ed.; China machine press: Beijing, China, 2012; pp. 14–117. [Google Scholar]
- Wang, C.S.; Li, Y.; Peng, K. Overview of Typical Control Methods for Grid-Connected Inverters of Distributed Generation. Proc. CSU-EPSA 2012, 24, 12–20. [Google Scholar]
- Zhang, N.Y.; Tang, H.J.; Yao, C. A systematic method for designing a PR controller and active damping of the LCL filter for single-phase grid-connected PV inverters. Energies 2014, 7, 3934–3954. [Google Scholar] [CrossRef]
- Shi, C.W. Research on the Control Method of Three-Phase Inverter under Unbalanced Loads. Master’s Thesis, Southwest Jiaotong University, Chengdu, China, 1 May 2014. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameters | Values | PI Parameters | Values |
|---|---|---|---|
| DC voltage | 0.8 kV | 0.1/0.01 | |
| system voltage | 0.4 kV | 3.0/0.001 | |
| rated power P/Q | 50 kW/0 kVar | 0.25/0.015 | |
| filter inductance | 4 mH | 2.5/0.002 | |
| filter capacitance | 100 μF | 2.0/0.12 | |
| 1.5 mH | 5.0/0.005 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Jia, J.; Xue, S. Study on the Current-Limiting-Capable Control Strategy for Grid-Connected Three-Phase Four-Leg Inverter in Low-Voltage Network. Energies 2016, 9, 726. https://doi.org/10.3390/en9090726
Li B, Jia J, Xue S. Study on the Current-Limiting-Capable Control Strategy for Grid-Connected Three-Phase Four-Leg Inverter in Low-Voltage Network. Energies. 2016; 9(9):726. https://doi.org/10.3390/en9090726
Chicago/Turabian StyleLi, Botong, Jianfei Jia, and Shimin Xue. 2016. "Study on the Current-Limiting-Capable Control Strategy for Grid-Connected Three-Phase Four-Leg Inverter in Low-Voltage Network" Energies 9, no. 9: 726. https://doi.org/10.3390/en9090726